

Event-triggered NN Adaptive Distributed Optimal Control for Nonlinear Multiagent Systems
-
摘要: 针对具有未知动力学的非线性多智能体系统, 研究事件触发神经网络自适应分布式优化控制问题. 通过结合神经网络与微分图博弈理论, 构建一种新型事件触发神经网络自适应分布式优化控制器. 为解决执行器频繁更新问题, 设计事件触发机制. 建立基于神经网络的强化学习算法, 学习优化控制器与Hamilton-Jacobi-Bellman方程的解析解, 利用当前采样数据和历史存储数据设计评价网络的权重更新机制. 构造Lyapunov函数证明了被控非线性多智能体系统为渐近稳定并达到纳什均衡. 计算机仿真结果验证了所提分布式最优控制方案的有效性.
-
关键词:
- 非线性多智能体系统1 /
- 事件触发机制2 /
- 分布式神经网络自适应优化控制3 /
- Nash均衡4
Abstract: This paper investigates the event-triggered neural network (NN) adaptive distributed optimal control problem for nonlinear multi-agent systems with unknown dynamics. By integrating NN with differential graphical game theory, a novel event-triggered NN adaptive distributed optimal controller is developed. To deal with the problem of frequent updates of the actuator, an event-triggered mechanism is designed. A reinforcement learning-based NN algorithm is designed to learn the optimal controller and the analytical solution of the Hamilton-Jacobi-Bellman equation, where the updating mechanisms for the critic network weights are constructed by integrating current sampled data and historical stored data. The asymptotic stability of the controlled nonlinear multi-agent systems and the achievement of Nash equilibrium are rigorously proved via Lyapunov functions. Finally, computer simulation results demonstrate the effectiveness of the proposed distributed optimal control scheme. -
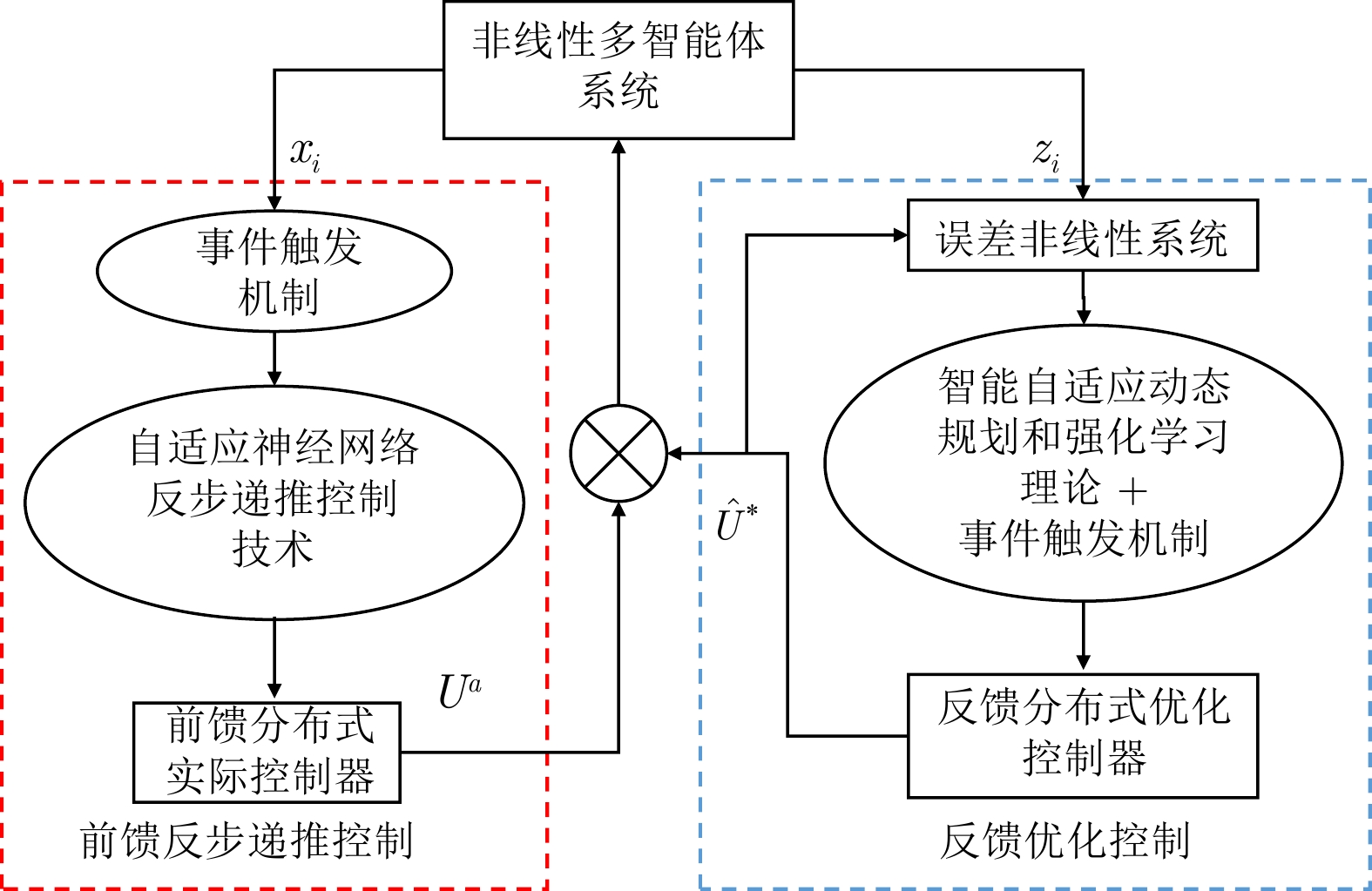
图 1 事件触发分布式优化控制框图
Fig. 1 The Block diagram of event-triggered distributed optimal control
-
[1] W. He, B. Xu, Q.-L. Han and F. Qian. Adaptive consensus control of linear multiagent systems with dynamic event-triggered strategies. IEEE Trans. Cybern., 2020, 50(7): 2996−3008 doi: 10.1109/TCYB.2019.2920093 [2] Z. K. Li, X. D. Liu, W. Ren, and L. H. Xie. Distributed tracking control for linear multiagent systems with a leader of bounded unknown input. IEEE Trans. Autom. Control, 2013, 58(2): 518−523 doi: 10.1109/TAC.2012.2208295 [3] W. He, B. Zhang, Q.-L. Han, F. Qian, J. Kurths, and J. Cao. Leader-following consensus of nonlinear multiagent systems with stochastic sampling. IEEE Trans. Cybern., 2017, 47(2): 327−338 [4] W. W. Yu, H. Wang, F. Cheng, X. H. Yu, and G. H. Wen. Second-order consensus in multiagent systems via distributed sliding mode control. IEEE Trans. Cybern., 2017, 47(8): 1872−1881 doi: 10.1109/TCYB.2016.2623901 [5] F. Wang, B. Chen, C. Lin and X. Li. Distributed adaptive neural control for stochastic nonlinear multiagent systems. IEEE Trans. Cybern., 2017, 47(7): 1795−1803 doi: 10.1109/TCYB.2016.2623898 [6] Q. Shen, B. Jiang, P. Shi and J. Zhao. Cooperative adaptive fuzzy tracking control for networked unknown nonlinear multiagent systems with time-varying actuator faults. IEEE Trans. Fuzzy Syst., 2014, 22(3): 494−504 doi: 10.1109/TFUZZ.2013.2260757 [7] C. L. P. Chen, C.-E. Ren and T. Du. Fuzzy observed-based adaptive consensus tracking control for second-order multiagent systems with heterogeneous nonlinear dynamics. IEEE Trans. Fuzzy Syst., 2016, 24(4): 906−915 doi: 10.1109/TFUZZ.2015.2486817 [8] J. Zhang, H. Zhang and T. Feng. Distributed optimal consensus control for nonlinear multiagent system with unknown dynamic. IEEE Trans. Neural Netw. Learn. Syst., 2018, 29(8): 3339−3348 doi: 10.1109/TNNLS.2017.2728622 [9] W. Su, C. Mu, X. Yang, J. Bian and C. Sun. Optimal tracking control for leader-following consensus of nonlinear multiagent systems. IEEE Trans. Syst., Man, Cybern. Syst., 2025, 55(5): 3098−3107 doi: 10.1109/TSMC.2025.3539351 [10] J. Qin, M. Li, Y. Shi, Q. Ma and W. X. Zheng. Optimal synchronization control of multiagent systems with input saturation via off-policy reinforcement learning. IEEE Trans. Neural Netw. Learn. Syst., 2019, 30(1): 85−96 doi: 10.1109/TNNLS.2018.2832025 [11] G. Wen, C. L. P. Chen, J. Feng and N. Zhou. Optimized multi-agent formation control based on an identifier-actor-critic reinforcement learning algorithm. IEEE Trans. Fuzzy Syst., 2018, 26(5): 2719−2731 doi: 10.1109/TFUZZ.2017.2787561 [12] J. L. Sun and C. S. Liu. Distributed fuzzy adaptive backstepping optimal control for nonlinear multimissile guidance systems with input saturation. IEEE Trans. Fuzzy Syst., 2019, 27(3): 447−461 doi: 10.1109/tfuzz.2018.2859904 [13] M. S. Liu, Y. Wan, V. G. Lopez, F. L. Lewis, G. A. Hewer, and K. Estabridis. Differential graphical game with distributed global Nash solution. IEEE Trans. Control Netw. Syst., 2021, 8(3): 1371−1382 doi: 10.1109/TCNS.2021.3065654 [14] Y. Y. Qian, M. S. Liu, Y. Wan, F. L. Lewis, and A. Davoudi. Distributed adaptive Nash equilibrium solution for differential graphical games. IEEE Trans. Cybern., 2023, 53(4): 2275−2287 doi: 10.1109/TCYB.2021.3114749 [15] Y. Ren, Q. Wang, and Z. Duan. Optimal leader-following consensus control of multi-agent systems: A neural network based graphical game approach. IEEE Trans. Netw. Sci. Eng., 2022, 9(5): 3590−3601 doi: 10.1109/TNSE.2022.3185019 [16] M. Mazouchi, M. B. Naghibi-Sistani and S. K. H. Sani. A novel distributed optimal adaptive control algorithm for nonlinear multi-agent differential graphical games. IEEE-CAA J. Automatica Sin., 2018, 5(1): 331−341 [17] Y. Zhang, B. Zhao, D. Liu and S. Zhang. Distributed fault tolerant consensus control of nonlinear multiagent systems via adaptive dynamic programming. IEEE Trans. Neural Netw. Learn. Syst., 2024, 35(7): 9041−9053 [18] H. Zhang, J. Zhang, G.-H. Yang and Y. Luo. Leader-based optimal coordination control for the consensus problem of multiagent differential games via fuzzy adaptive dynamic programming. IEEE Trans. Fuzzy Syst., 2015, 23(1): 152−163 doi: 10.1109/TFUZZ.2014.2310238 [19] W. Wu and S. Tong. Adaptive fuzzy distributed optimal FTC for nonlinear multiagent systems based multiplayer differential game. IEEE Trans. Fuzzy Syst., 2025, 33(2): 657−668 doi: 10.1109/TFUZZ.2024.3488015 [20] L. J. Long, F, L. Wang, and Z. Y Chen. Robust adaptive dynamic event triggered control of switched nonlinear systems. IEEE Trans. Autom. Contnol, 2023, 68(8): 4873−4887 doi: 10.1109/TAC.2022.3217100 [21] L. Cao, D. Y. Yao, H. Y. Li, W. Meng, and R.Q. Lu. Fuzzy based dynamic event triggering formation control for nonstrict-feedback nonlinear MASs. Fuzzy Sets Syst., 2023, 452: 1−22 doi: 10.1016/j.fss.2022.03.005 [22] S. C. Tong, H. D. Zhou, and Y, M. Li. Neural network event-triggeredformation fault-tolerant control for nonlinear multiagent systems withactuator faults. IEEE Tans. Syst., Man, Cybern., Syst., 2023, 53(12): 7571−7582 doi: 10.1109/TSMC.2023.3298656 [23] Q. Wei, S. Jiao, Q. Dong and F.-Y. Wang. Event-triggered robust parallel optimal consensus control for multiagent systems. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 40−53 doi: 10.1109/JAS.2024.124773 [24] C. Zhang, L. Ji, S. Yang. Distributed optimal consensus control for multiagent systems based on event-triggered and prioritized experience replay strategies. Sci. China Inf. Sci, 2025, 68: 112206 doi: 10.1007/s11432-023-4183-4 [25] F. L. Lewis, S. Jagannathan, and A. Yesildirak, "Neural network control of robot manipulators and non-linear systems, " Philadelphia, PA: CRC press, 2020. [26] Z. H. Peng, Y. Jiang, L. Liu and Y. Shi. Path-guided model-free flocking control of unmanned surface vehicles based on concurrent learning extended state observers. IEEE Trans. Syst., Man, Cybern. Syst., 2023, 53(8): 4729−4739 doi: 10.1109/TSMC.2023.3256371 -

 下载:
下载:

计量
- 文章访问数: 226
- HTML全文浏览量: 189
- 被引次数: 0
