

Non-cooperative Game-based Optimization Management of Stability Margin and Energy Efficiency for an In-wheel Motor Group on Four-wheel Independently Driven Electric Vehicles
-
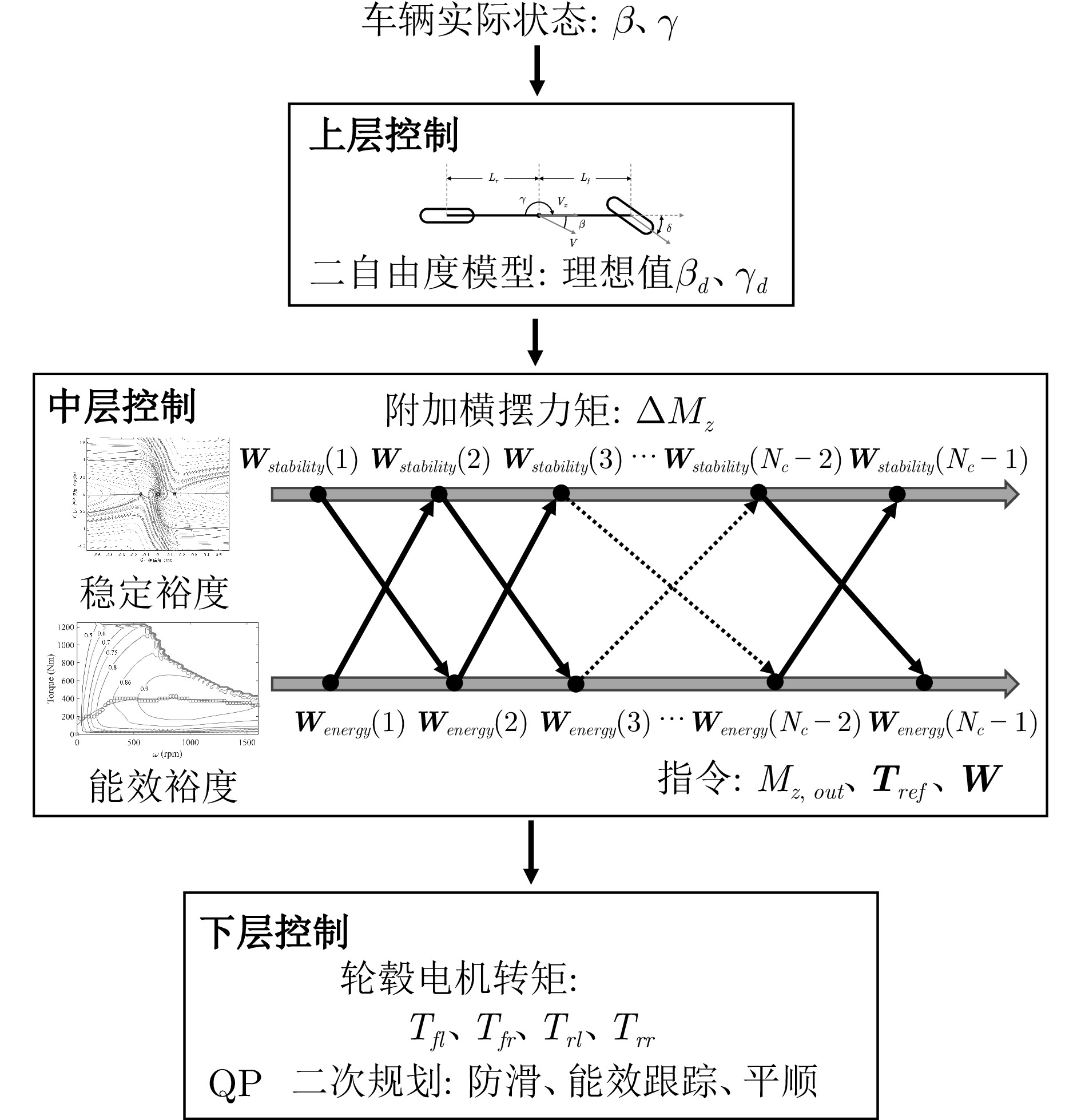
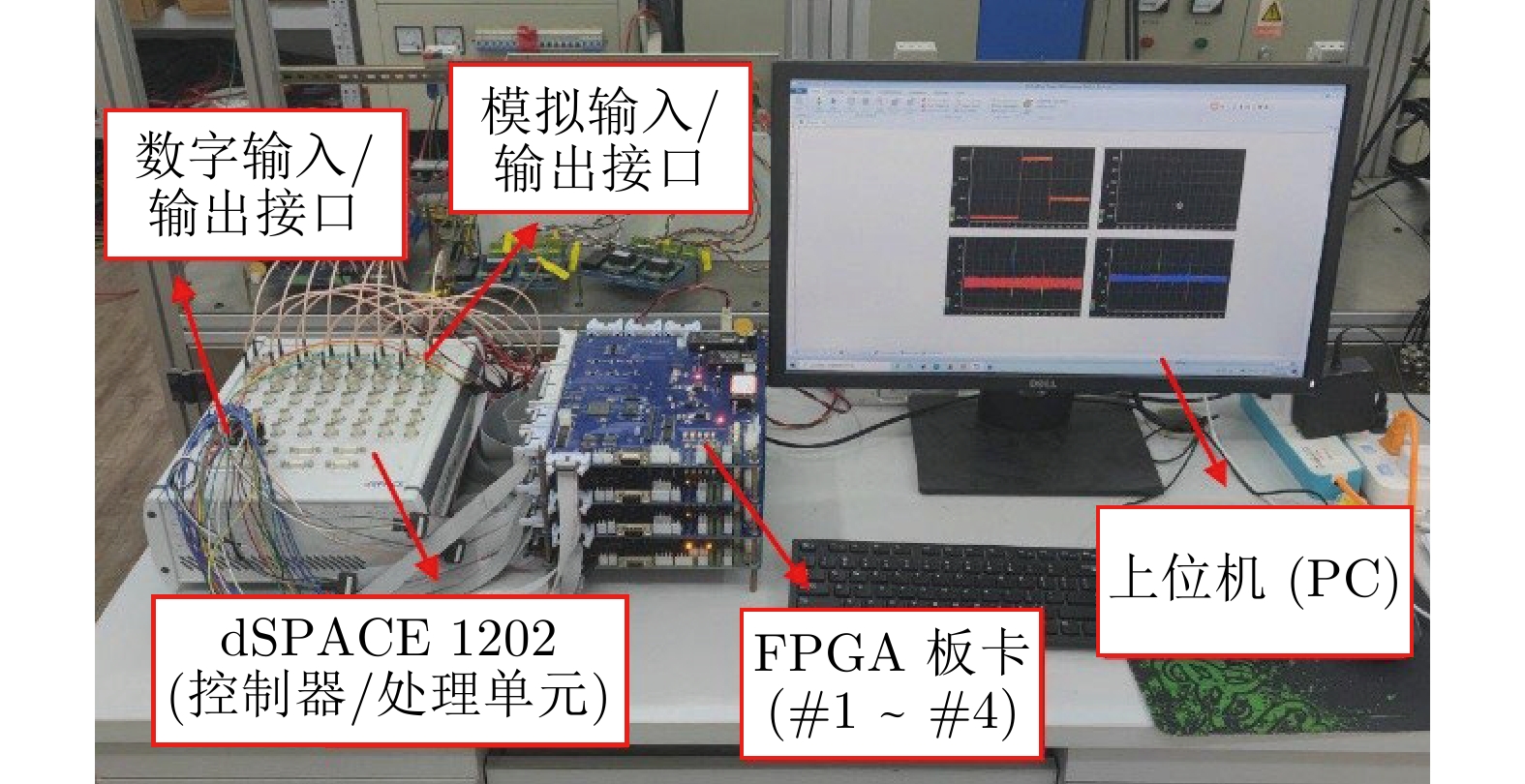
摘要: 针对四轮独立驱动电动汽车轮毂电机转矩矢量控制中稳定性与经济性相冲突的问题, 提出一种基于稳定裕度博弈与分层优化的协同控制策略. 首先建立车辆动力学模型与高保真能耗模型; 进而设计分层控制器: 上层基于线性二次调节器计算广义横摆力矩, 中层通过模型预测控制在相平面稳定裕度约束下以系统损耗最小为目标优化横摆力矩与分配权重, 下层利用二次规划算法求解最优轮端转矩. 基于dSPACE平台的硬件在环仿真结果表明, 在双移线工况下, 所提策略在保证稳定性的同时能耗降低5.7%, 具有优良的综合性能与鲁棒性.Abstract: Aiming at the conflict between stability and economy in torque vectoring control of in-wheel motors for four-wheel independently driven electric vehicles, a coordinated control strategy based on stability margin game and hierarchical optimization is proposed. First, a vehicle dynamics model and a high-fidelity energy consumption model are established; Then, a hierarchical controller is designed: The upper layer calculates the generalized yaw moment based on a linear quadratic regulator, the middle layer employs model predictive control to optimize the yaw moment and distribution weights with the objective of minimizing system losses, subject to stability margin constraints in the phase plane, and the lower layer solves for the optimal wheel torque using a quadratic programming algorithm. Hardware-in-the-loop simulation results based on dSPACE platform show that under double lane-change maneuver, the proposed strategy reduces energy consumption by 5.7% while ensuring stability, demonstrating excellent comprehensive performance and robustness.
-
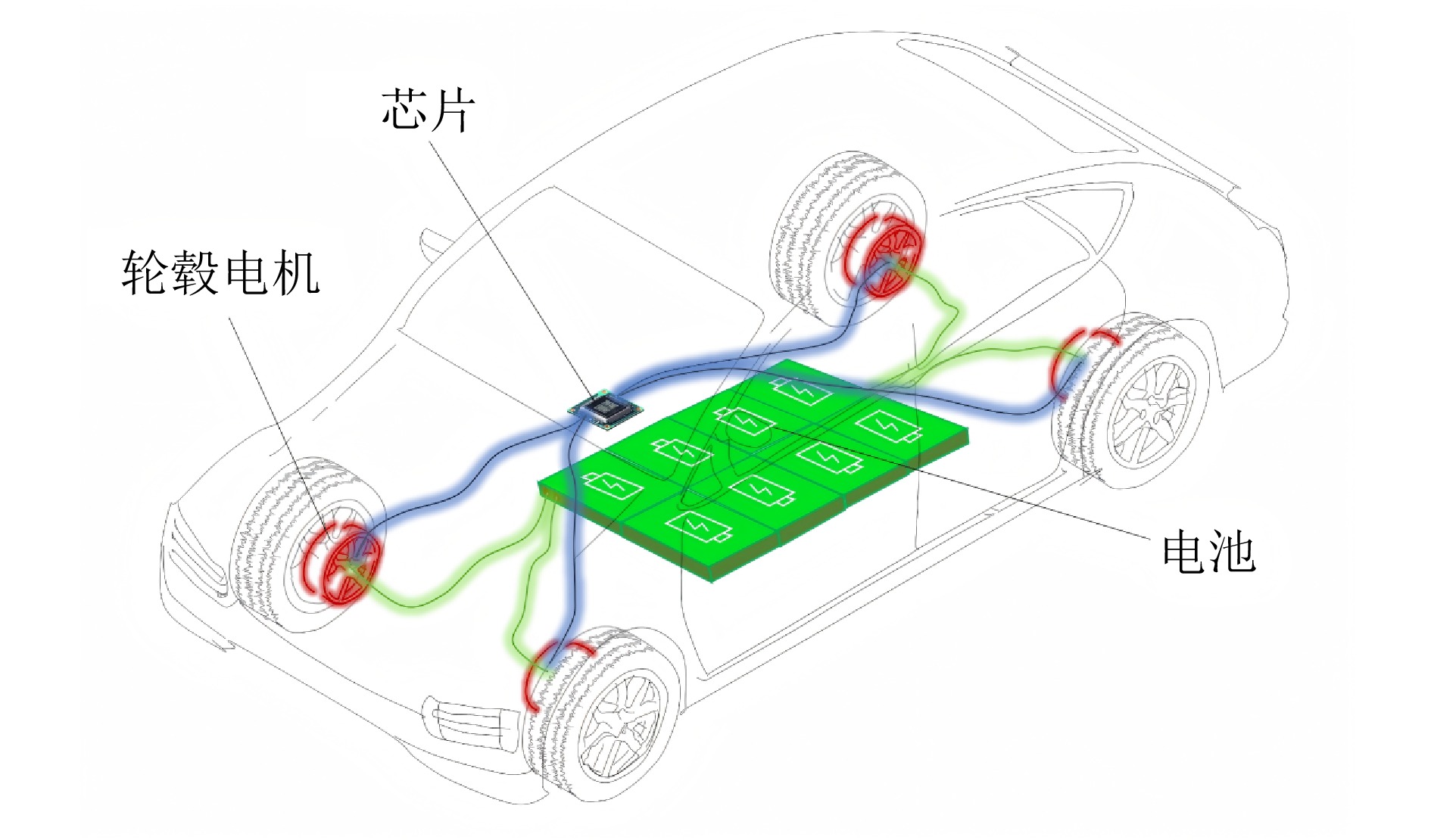
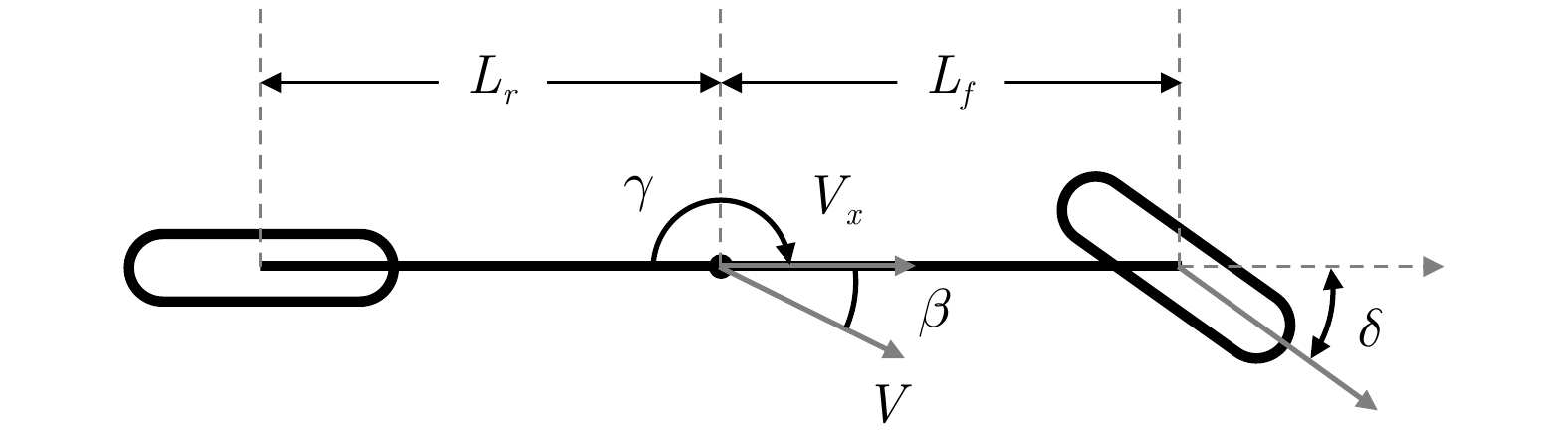
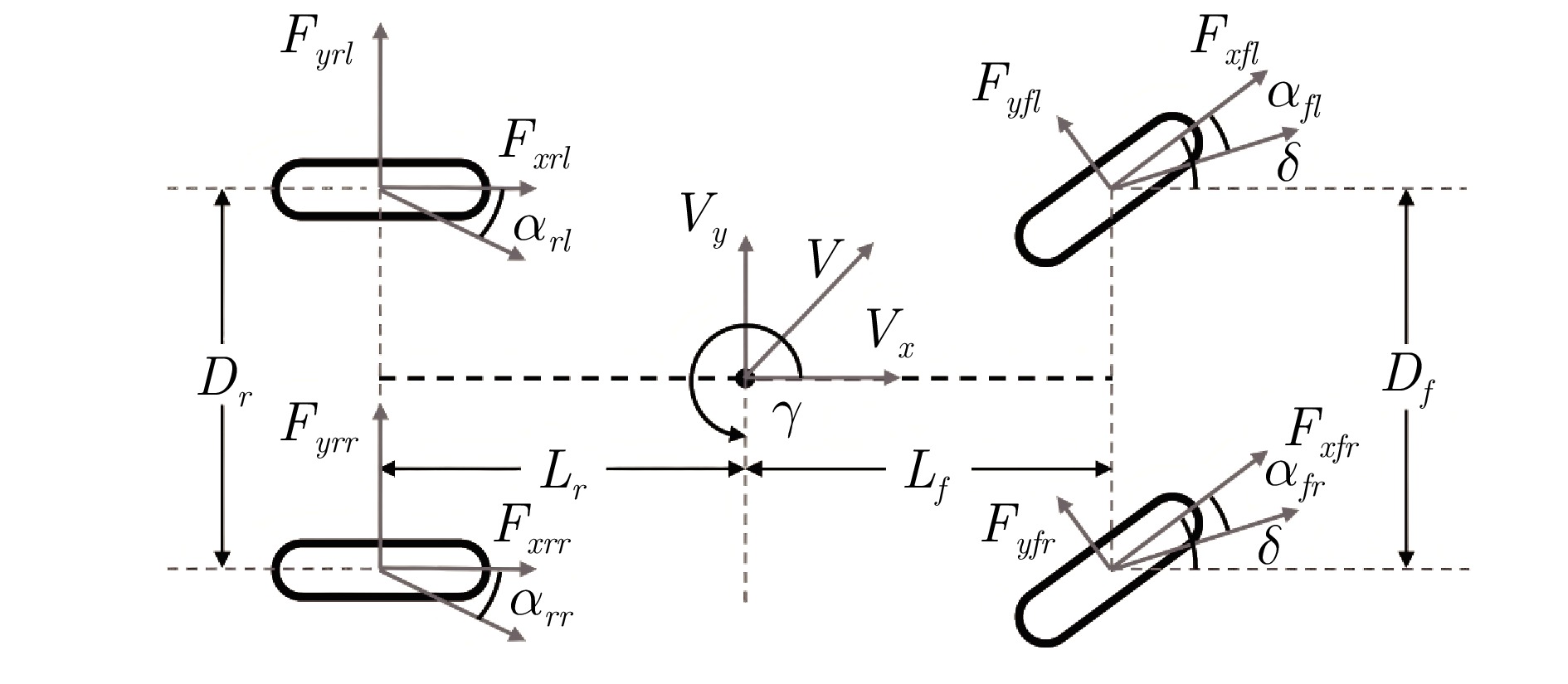
图 1 四轮独立驱动电动汽车拓扑图
Fig. 1 Topology diagram of four-wheel independently driven electric vehicles
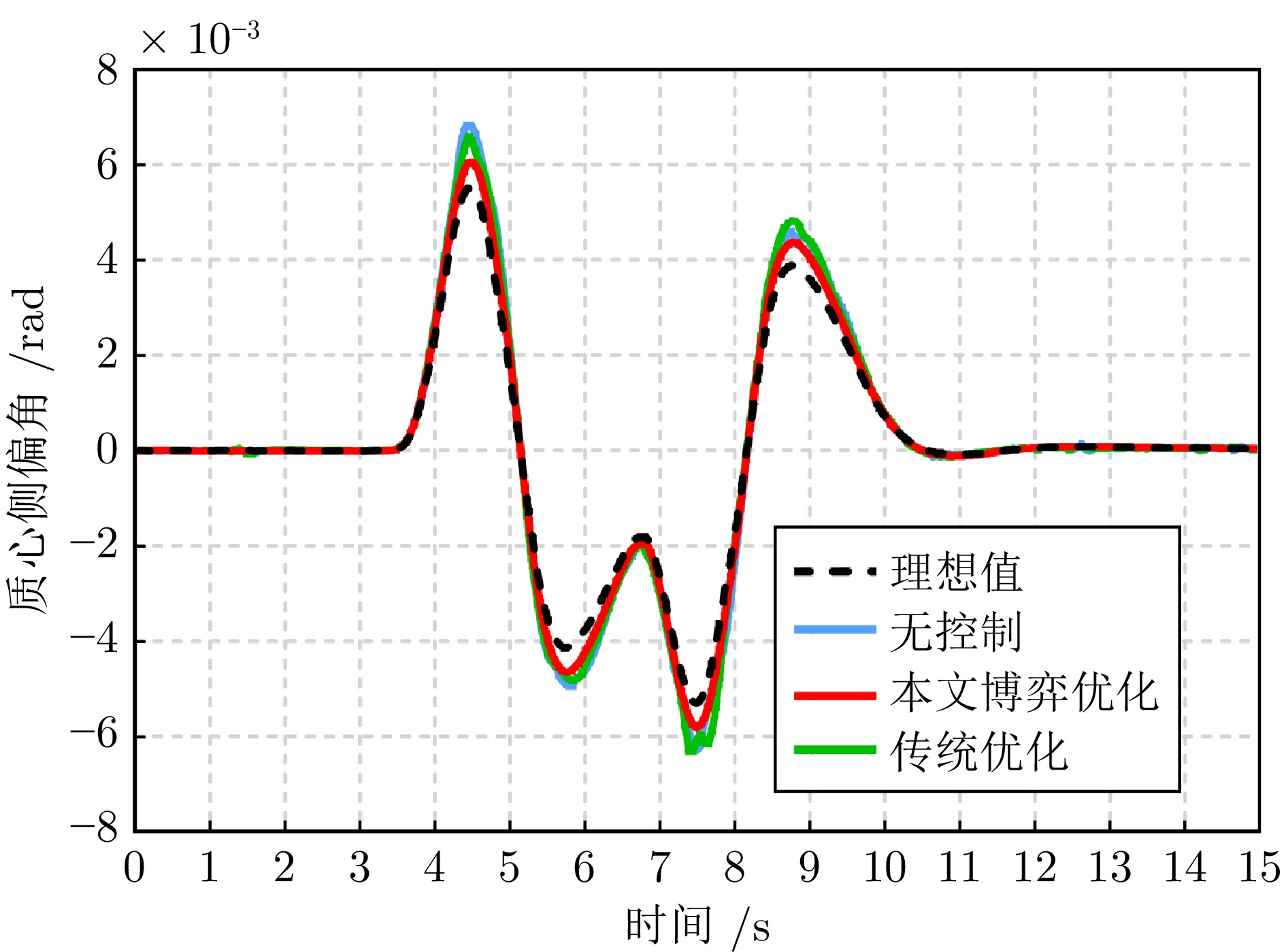
图 9 基于质心侧偏角($ \beta $和$ \beta_d $)的车辆稳定性能 对比(60 km/h)
Fig. 9 Comparison of vehicle stability performance based on center of gravity sideslip angle $ \beta $ and $ \beta_d \; $ (60 km/h)
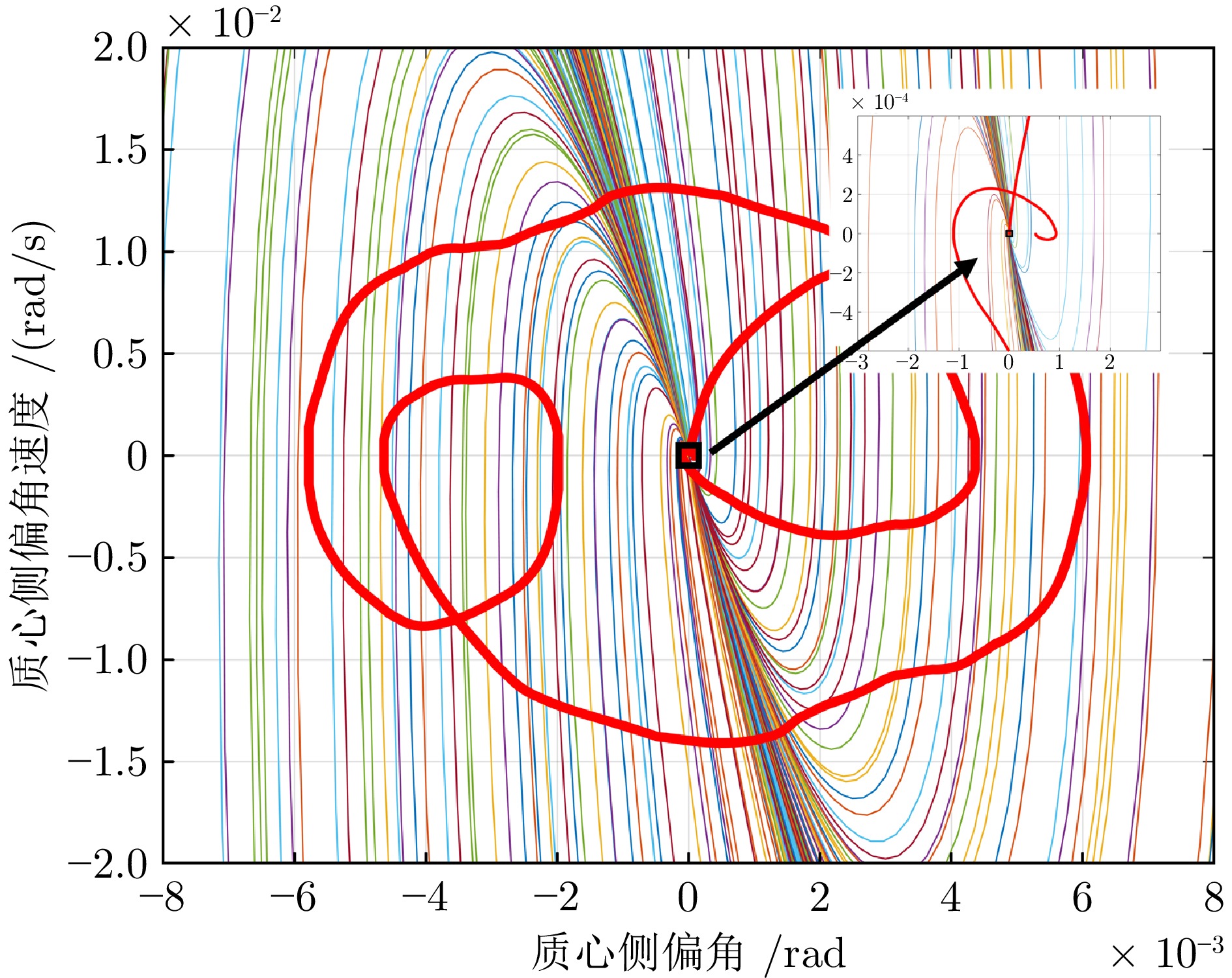
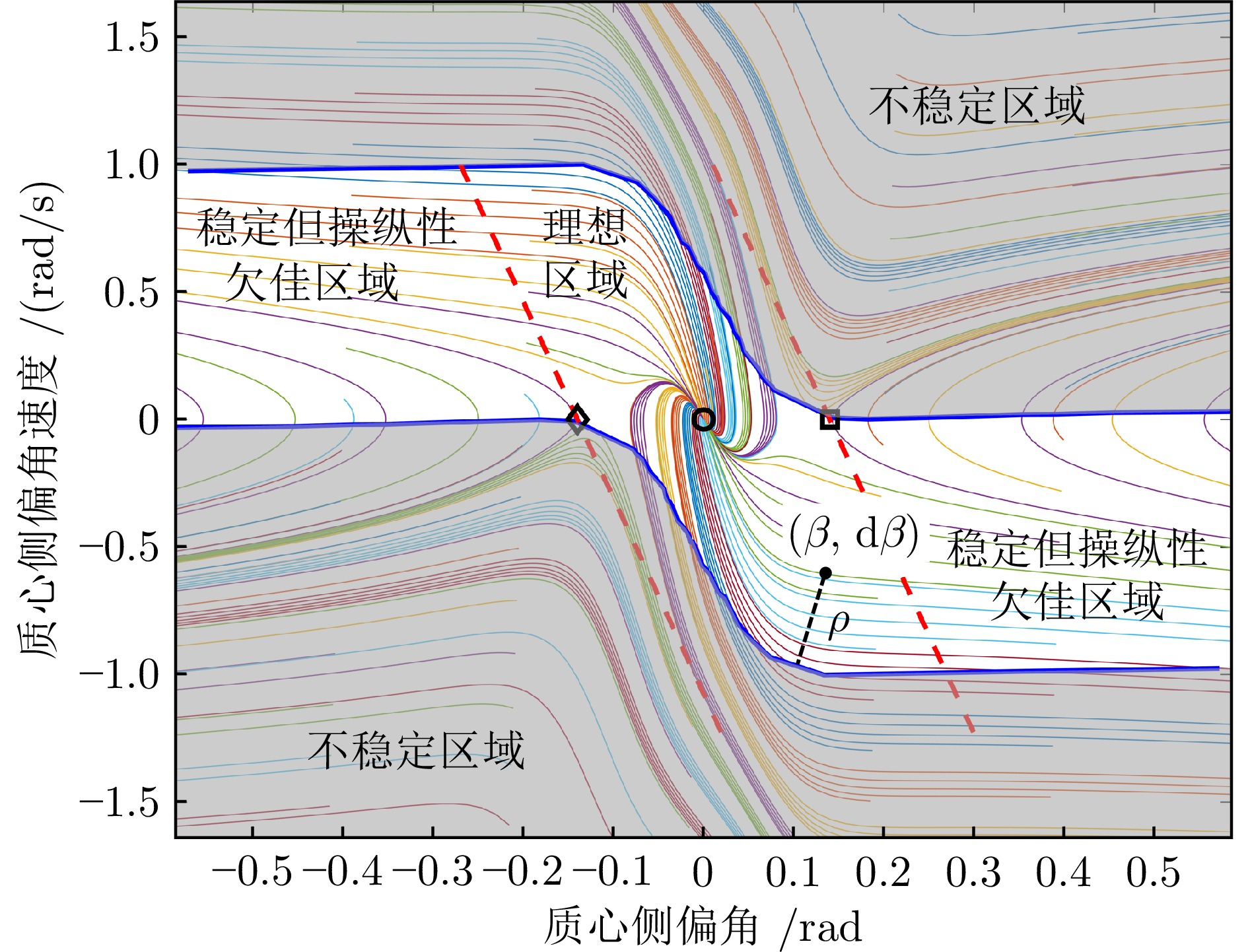
图 10 车辆相平面能效与稳定博弈轨迹(60 km/h)
Fig. 10 Vehicle phase-plane trajectory of energy-efficiency and stability game (60 km/h)
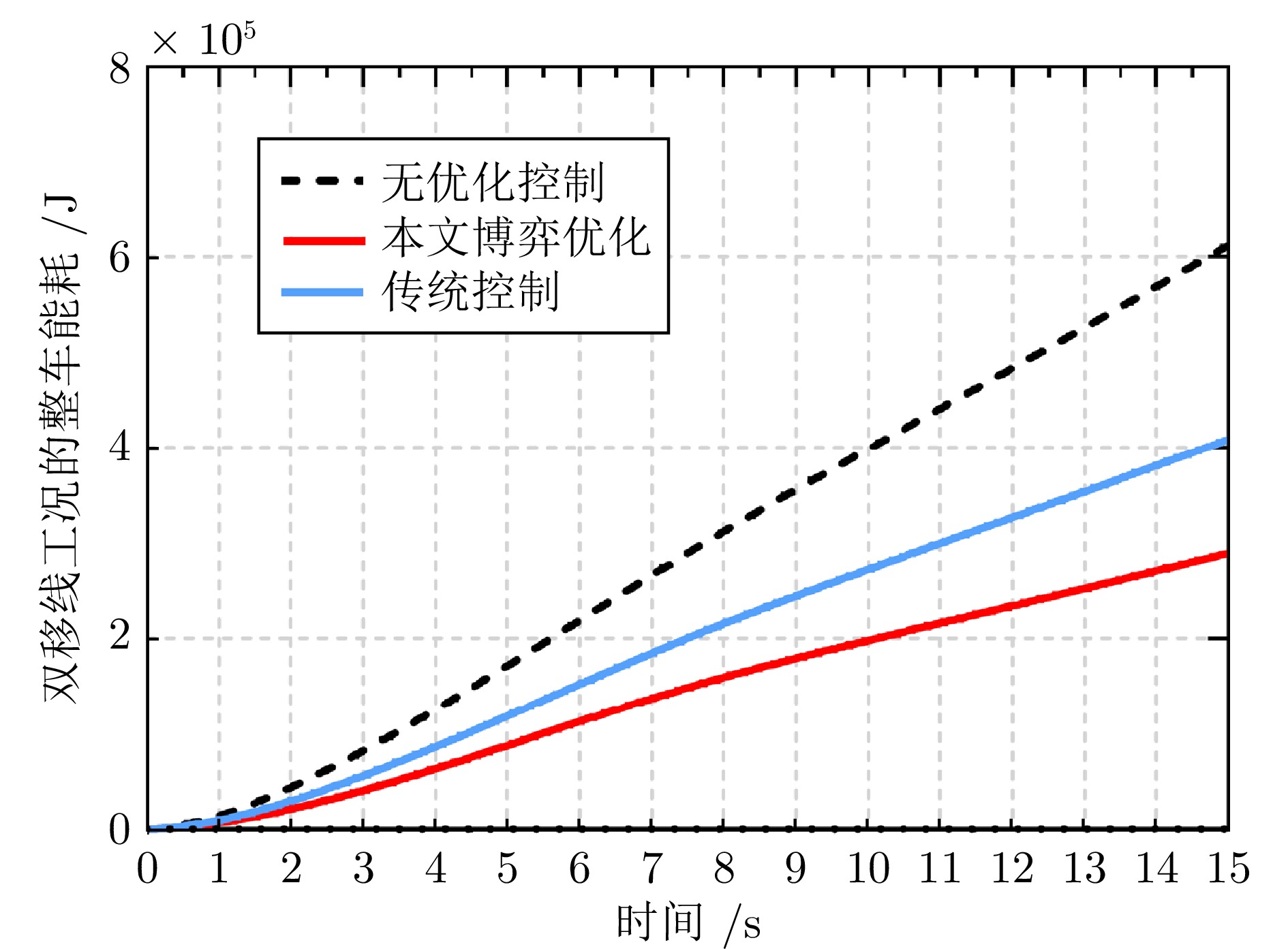
图 11 汽车驱动系统总能耗对比(60 km/h)
Fig. 11 Total energy consumption comparison of the vehicle propulsion system (60 km/h)
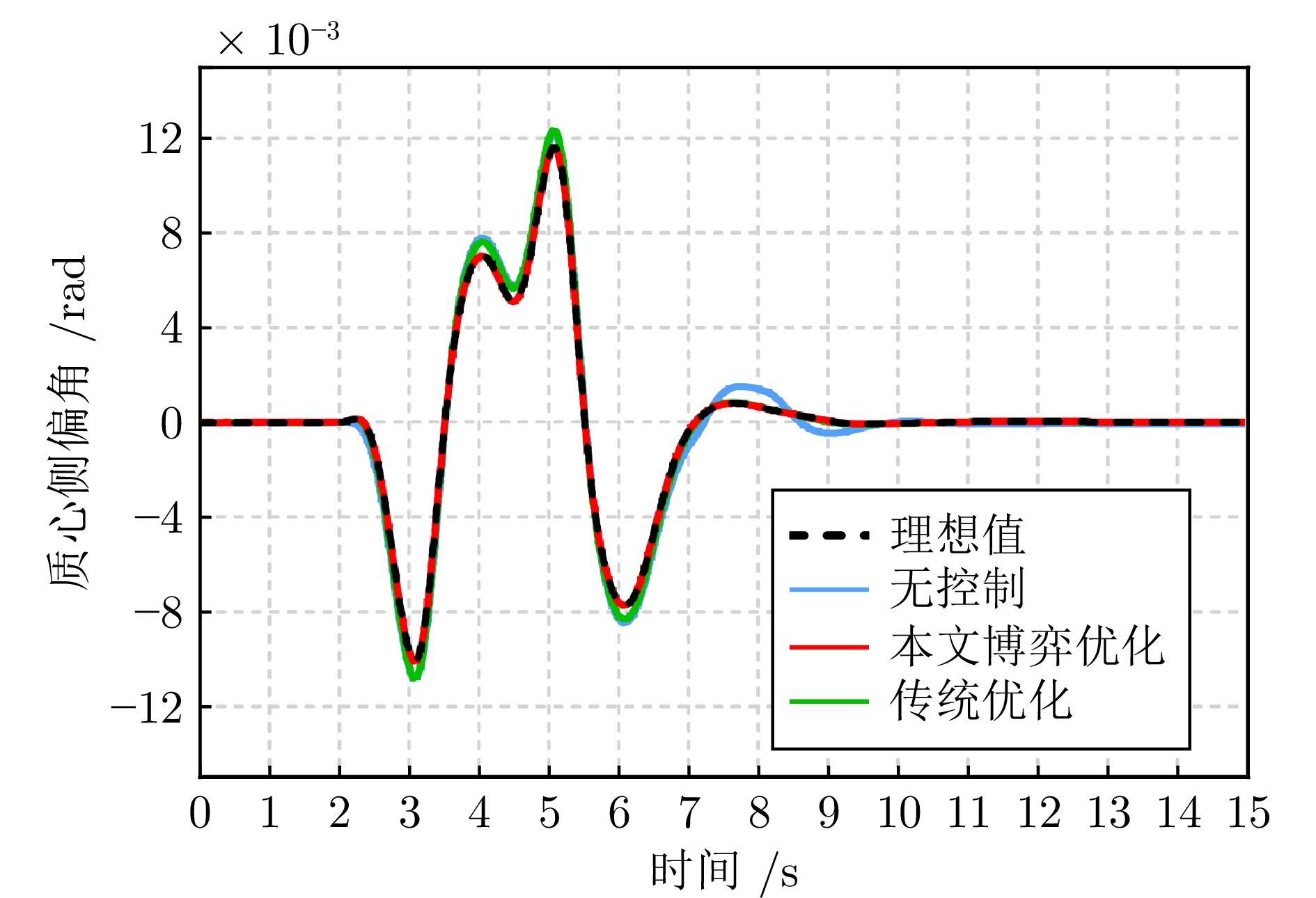
图 14 基于质心侧偏角($ \beta $和$ \beta_d $)的车辆稳定性能对比(90 km/h)
Fig. 14 Comparison of vehicle stability performance based on center of gravity sideslip angle $ \beta $ and $ \beta_d $ (90 km/h)
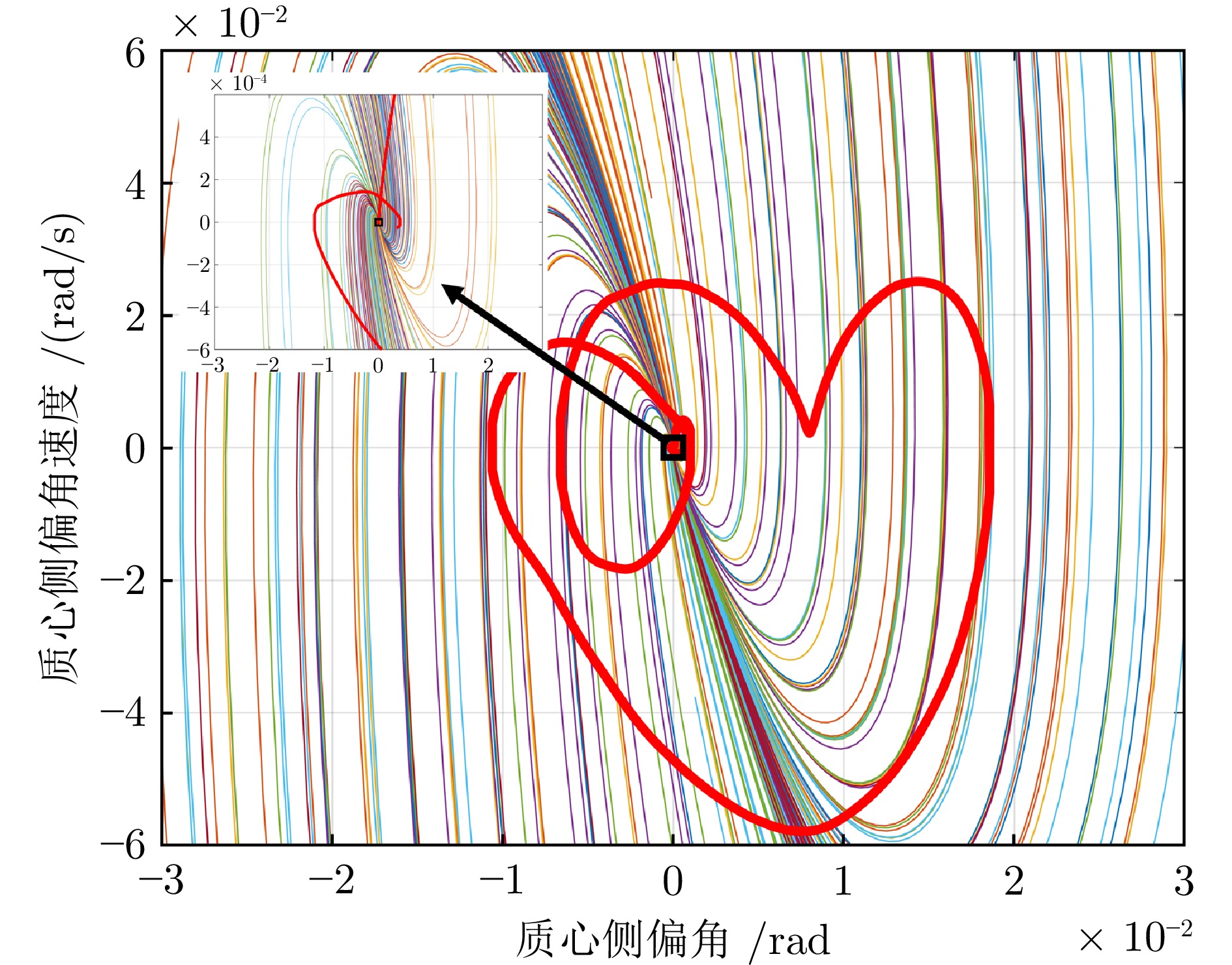
图 15 车辆相平面能效与稳定博弈轨迹(90 km/h)
Fig. 15 Vehicle phase-plane trajectory of energy-efficiency and stability game (90 km/h)
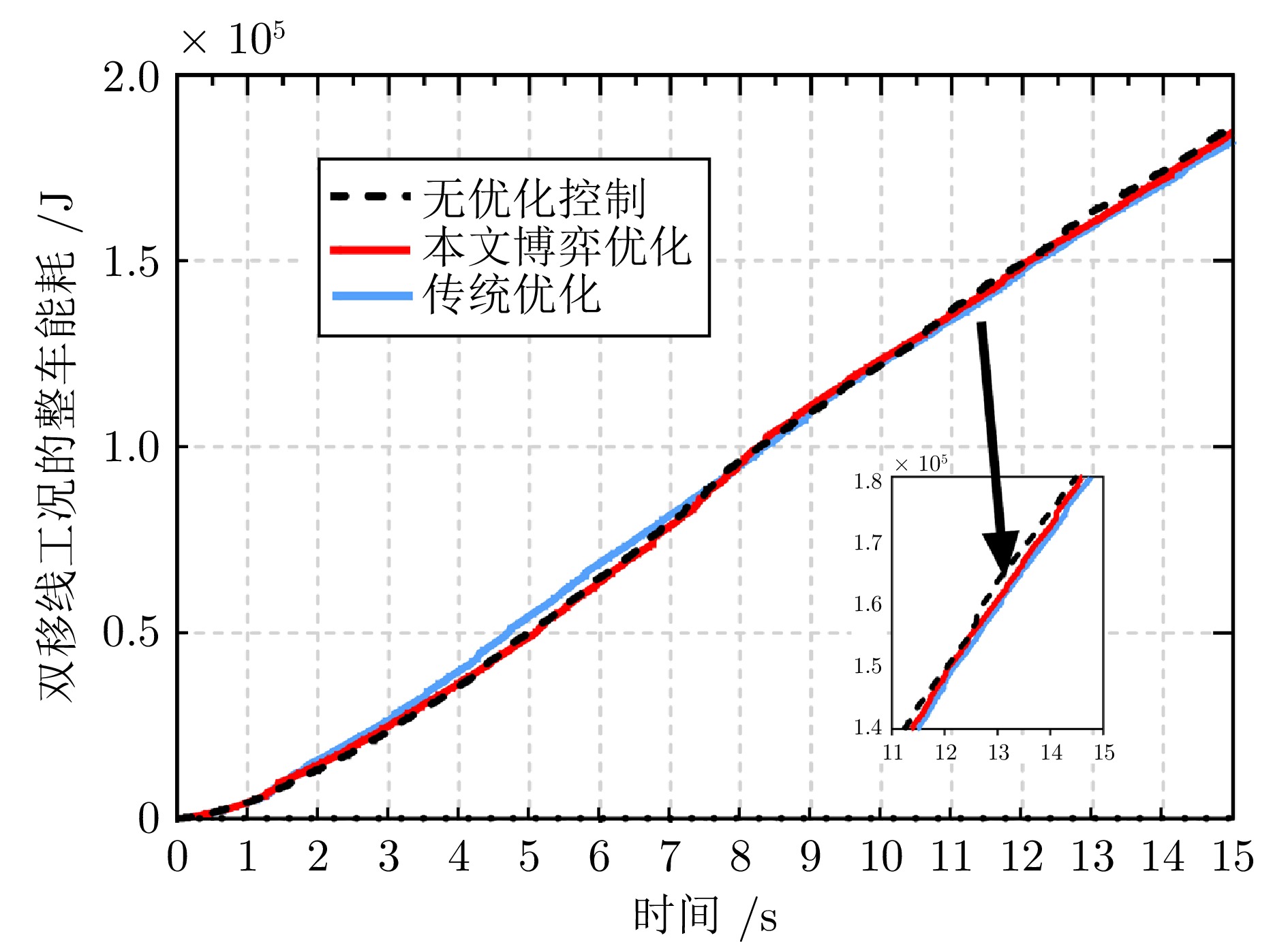
图 16 汽车驱动系统总能耗对比(90 km/h)
Fig. 16 Total energy consumption comparison of the vehicle propulsion system (90 km/h)
-
[1] 来鑫, 陈辛波, 方淑德, 谢万军. 四轮独立驱动−独立转向电动车辆动力学控制现状. 河北科技大学学报, 2016, 37(4): 322−328Lai Xin, Chen Xin-Bo, Fang Shu-De, Xie Wan-Jun. Review on dynamics control of 4WID-4WIS electric vehicle. Journal of Hebei University of Science and Technology, 2016, 37(4): 322− 328 [2] 温传新, 王培欣, 花为. 电动汽车驱动系统的研究现状与发展趋势. 微电机, 2019, 52(10): 103−109 doi: 10.3969/j.issn.1001-6848.2019.10.019Wen Chuan-Xin, Wang Pei-Xin, Hua Wei. Driving technology of electric vehicles: Current developments and future prospects. Micromotors, 2019, 52(10): 103−109 doi: 10.3969/j.issn.1001-6848.2019.10.019 [3] Hua X, Xiang K, Cheng X L, Ning X B. An adaptive compound control strategy of electric vehicles for coordinating lateral stability and energy efficiency. Applied Sciences, 2025, 15(6): Article No. 3347 doi: 10.3390/app15063347 [4] Techalimsakul P, Keyoonwong W. Integrated vehicle-following control for four-wheel independent drive based on regenerative braking system control mechanism for battery electric vehicle conversion driven by PMSM 30 kW. Energies, 2024, 17(11): Article No. 2576 doi: 10.3390/en17112576 [5] 丁晓林, 王震坡, 张雷. 四轮轮毂电机驱动电动汽车驱动系统参数多目标优化匹配. 机械工程学报, 2021, 57(8): 195−204Ding Xiao-Lin, Wang Zhen-Po, Zhang Lei. Powertrain sizing for four-wheel-independent-actuated electric vehicles based on multi-objective optimization. Journal of Mechanical Engineering, 2021, 57(8): 195−204 [6] Ghadbane H E, Barkat S, Houari A, Ferahtia S, Djerioui A, Mesbahi T. A new energy management strategy for electric vehicles based on optimal adaptive state machine control. Smart Grids and Energy, 2024, 9: Article No. 28 doi: 10.1007/s40866-024-00208-2 [7] Guo X, Li Q, Yao Q J, Tan Z. Robust fixed-time dynamic event-triggered control with disturbance observer for uncertain hybrid energy storage system in pure electric vehicles. Journal of Energy Storage, 2025, 126: Article No. 116909 doi: 10.1016/j.est.2025.116909 [8] 田涛涛, 侯忠生, 刘世达, 邓志东. 基于无模型自适应控制的无人驾驶汽车横向控制方法. 自动化学报, 2017, 43(11): 1931−1940Tian Tao-Tao, Hou Zhong-Sheng, Liu Shi-Da, Deng Zhi-Dong. Model-free adaptive control based lateral control of self-driving car. Acta Automatica Sinica, 2017, 43(11): 1931−1940 [9] 王军年, 杨斌, 王庆年, 倪健土. 汽车转矩定向分配驱动技术发展现状综述. 机械工程学报, 2020, 56(18): 92−104 doi: 10.3901/JME.2020.18.092Wang Jun-Nian, Yang Bin, Wang Qing-Nian, Ni Jian-Tu. Review on vehicle drive technology of torque vectoring. Journal of Mechanical Engineering, 2020, 56(18): 92−104 doi: 10.3901/JME.2020.18.092 [10] Li K W, Li Y M. Fuzzy adaptive optimization prescribed performance control for nonlinear vehicle platoon. IEEE Transactions on Vehicular Technology, 2024, 32(2): 360−372 doi: 10.1109/tfuzz.2023.3298385 [11] Zhang J L, Zhu D B, Jian W, Hu W T, Peng G S, Chen Y F, et al. Fractional order complementary non-singular terminal sliding mode control of PMSM based on neural network. International Journal of Automotive Technology, 2024, 25: 213−224 doi: 10.1007/s12239-024-00015-9 [12] Park G, Han K, Nam K, Kim H, Choi S B. Torque vectoring algorithm of electronic-four-wheel drive vehicles for enhancement of cornering performance. IEEE Transactions on Vehicular Tech-nology, 2020, 69(4): 3668−3679 doi: 10.1109/TVT.2020.2978099 [13] Feng H, Tao Y K, Feng J B, Zhang Y L, Xue H T, Wang T S, et al. Fault-tolerant collaborative control of four-wheel-drive electric vehicle for one or more in-wheel motors' faults. Sensors, 2025, 25(5): Article No. 1540 doi: 10.3390/s25051540 [14] 张文韬. 四轮毂电机驱动电动汽车SBW失效容错控制研究 [硕士学位论文], 重庆交通大学, 中国, 2021.Zhang Wen-Tao. Research on Fault-tolerant Control of SBW of Four-wheel Hub Motor Driven Electric Vehicle [Master thesis], Chongqing Jiaotong University, China, 2021. [15] Zhao J, Li R B, Zheng X Y, Li W F, Hu C, Liang Z C, et al. Constrained fractional-order model predictive control for robust path following of FWID-AGVs with asymptotic prescribed performance. IEEE Transactions on Vehicular Technology, 2025, 74(2): 2692−2705 doi: 10.1109/TVT.2024.3476921 [16] Guo J H, Wang J Y, Luo Y G, Li K Q. Robust lateral control of autonomous four-wheel independent drive electric vehicles considering the roll effects and actuator faults. Mechanical Systems and Signal Processing, 2020, 143: Article No. 106773 doi: 10.1016/j.ymssp.2020.106773 [17] 王军年, 倪健土, 杨斌, Francis Assadian. 电动汽车转矩定向分配差速器建模与动态仿真. 汽车工程, 2020, 42(4): 491−497 doi: 10.19562/j.chinasae.qcgc.2020.04.011Wang Jun-Nian, Ni Jian-Tu, Yang Bin, Francis Assadian. Modelling and dynamic simulation of torque vectoring differential for EV. Automotive Engineering, 2020, 42(4): 491−497 doi: 10.19562/j.chinasae.qcgc.2020.04.011 [18] Liu L, Yin W. Anti-disturbance target tracking control of auxiliary unmanned ground vehicles for physical education. Electronics, 2024, 13(23): Article No. 4620 doi: 10.3390/electronics13234620 [19] Pan Q X, Zhou B, Wu X J, Cui Q J, Zheng K Q. Steering collision avoidance and lateral stability coordinated control based on vehicle lateral stability region. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2025, 239(5): 1699−1716 [20] Lian Y B, Chen G D, Liu P. Study of yaw moment control strategy of four wheel independent drive electric vehicle. Automotive Innovation, 2025, 8: 157−168 doi: 10.1007/s42154-024-00287-y [21] 赵秀春, 郭戈. 混合动力电动汽车能量管理策略研究综述. 自动化学报, 2016, 42(3): 321−334 doi: 10.3969/j.issn.1674-8425(z).2018.10.001Zhao Xiu-Chun, Guo Ge. Survey on energy management str-ategies for hybrid electric vehicles. Acta Automatica Sinica, 2016, 42(3): 321−334 doi: 10.3969/j.issn.1674-8425(z).2018.10.001 [22] 申永鹏, 袁小芳, 赵素娜, 孟步敏, 王耀南. 智能网联电动汽车节能优化控制研究进展与展望. 自动化学报, 2023, 49(12): 2437−2456 doi: 10.16383/j.aas.c220819Shen Yong-Peng, Yuan Xiao-Fang, Zhao Su-Na, Meng Bu-Min, Wang Yao-Nan. Energy-saving optimization control for connected automated electric vehicles: State of the art and perspective. Acta Automatica Sinica, 2023, 49(12): 2437−2456 doi: 10.16383/j.aas.c220819 [23] Zhang B, Lu S B. Fault-tolerant control for four-wheel independent actuated electric vehicle using feedback linearization and cooperative game theory. Control Engineering Practice, 2020, 101: Article No. 104510 doi: 10.1016/j.conengprac.2020.104510 [24] 倪健土. 新型双电机耦合驱动系统参数匹配和模式切换控制 [硕士学位论文], 吉林大学, 中国, 2021.Ni Jian-Tu. Parameter Matching and Mode Switching Control of a Novel Dual Motors Coupled Electric Driving System [Master thesis], Jilin University, China, 2021. [25] 于田雨. 双电机四驱汽车动力系统匹配设计和能量管理策略研究 [硕士学位论文], 吉林大学, 中国, 2021.Yu Tian-Yu. Research on Powertrain Matching Design and Energy Management Strategy of Dual-motor Four-wheel-drive Electric Vehicle [Master thesis], Jilin University, China, 2021. [26] Hu X, Chen H, Li Z H, Wang P. An energy-saving torque vectoring control strategy for electric vehicles considering handling stability under extreme conditions. IEEE Transactions on Veh-icular Technology, 2020, 69(10): 10787−10796 doi: 10.1109/TVT.2020.3011921 [27] Wang J N, Wang Z Y, Liu P X, Xu H X, Guo D D, Wei W. Differential drive collaborative steering control of independent-wheel-drive articulated-steering electric vehicles for energy saving. IEEE Transactions on Transportation Electrification, 2024, 10(2): 4142−4158 doi: 10.1109/TTE.2023.3313567 [28] Liang J H, Feng J W, Fang Z W, Lu Y B, Yin G D, Mao X, et al. An energy-oriented torque-vector control framework for distributed drive electric vehicles. IEEE Transactions on Transportation Electrification, 2023, 9(3): 4014−4031 doi: 10.1109/TTE.2022.3231933 [29] Zhang H, Zhao W Z, Wang J M. Fault-tolerant control for electric vehicles with independently driven in-wheel motors considering individual driver steering characteristics. IEEE Transactions on Vehicular Technology, 2019, 68(5): 4527−4536 doi: 10.1109/TVT.2019.2904698 [30] Kuslits M, Bestle D. Multiobjective performance optimisation of a new differential steering concept. Vehicle System Dynamics, 2020, 60(1): 73−95 doi: 10.1080/00423114.2020.1804598 [31] Guo N Y, Zhang X D, Zou Y, Lenzo B, Zhang T, Göhlich D. A fast model predictive control allocation of distributed drive electric vehicles for tire slip energy saving with stability constraints. Control Engineering Practice, 2020, 102: Article No. 104554 doi: 10.1016/j.conengprac.2020.104554 [32] Barbaro M, Genovese A, Timpone F, Sakhnevych A. Extension of the multiphysical magic formula tire model for ride comfort applications. Nonlinear Dynamics, 2024, 112: 4183−4208 doi: 10.1007/s11071-023-09266-0 [33] Liang J H, Feng J W, Lu Y B, Yin G D, Zhuang W C, Mao X. A direct yaw moment control framework through robust T-S fuzzy approach considering vehicle stability margin. IEEE/ASME Transactions on Mechatronics, 2024, 29(1): 166−178 doi: 10.1109/TMECH.2023.3274689 [34] Xu T, Zhao Y Q, Deng H F, Guo S, Li D Y, Lin F. Integrated optimal control of distributed in-wheel motor drive electric vehicle in consideration of the stability and economy. Energy, 2023, 282: Article No. 12890 doi: 10.2139/ssrn.4449739 [35] Wang Q, Wang Z Y, Wang H Y, Shang Z M, Xu W. Coordinated control of ARS and DYC for full X-by-Wire distributed drive electric vehicles based on stability domain division in extension phase plane. Control Engineering Practice, 2025, 162: Article No. 106344 doi: 10.1016/j.conengprac.2025.106344 [36] 陈辉, 邓东明, 韩崇昭. 基于区间箱粒子多伯努利滤波器的传感器控制策略. 自动化学报, 2021, 47(6): 1428−1443 doi: 10.16383/j.aas.c180541Chen Hui, Deng Dong-Ming, Han Chong-Zhao. Sensor control based on interval box-particle multi-Bernoulli filter. Acta Automatica Sinica, 2021, 47(6): 1428−1443 doi: 10.16383/j.aas.c180541 [37] Fang Z W, Han D M, Wang J X, Wei W P, Pi D W, Yin G D. A Nash-equilibrium-based AFS-TVA coordinated control system for distributed drive electric vehicles considering safety and energy. IEEE Transactions on Transportation Electrification, 2025, 11(1): 1915−1928 doi: 10.1109/TTE.2024.3412766 -

 下载:
下载:

计量
- 文章访问数: 413
- HTML全文浏览量: 747
- PDF下载量: 78
- 被引次数: 0
