

Therapist-like Interaction Control of a Dual-Arm Robot for Upper Limb Rehabilitation
-
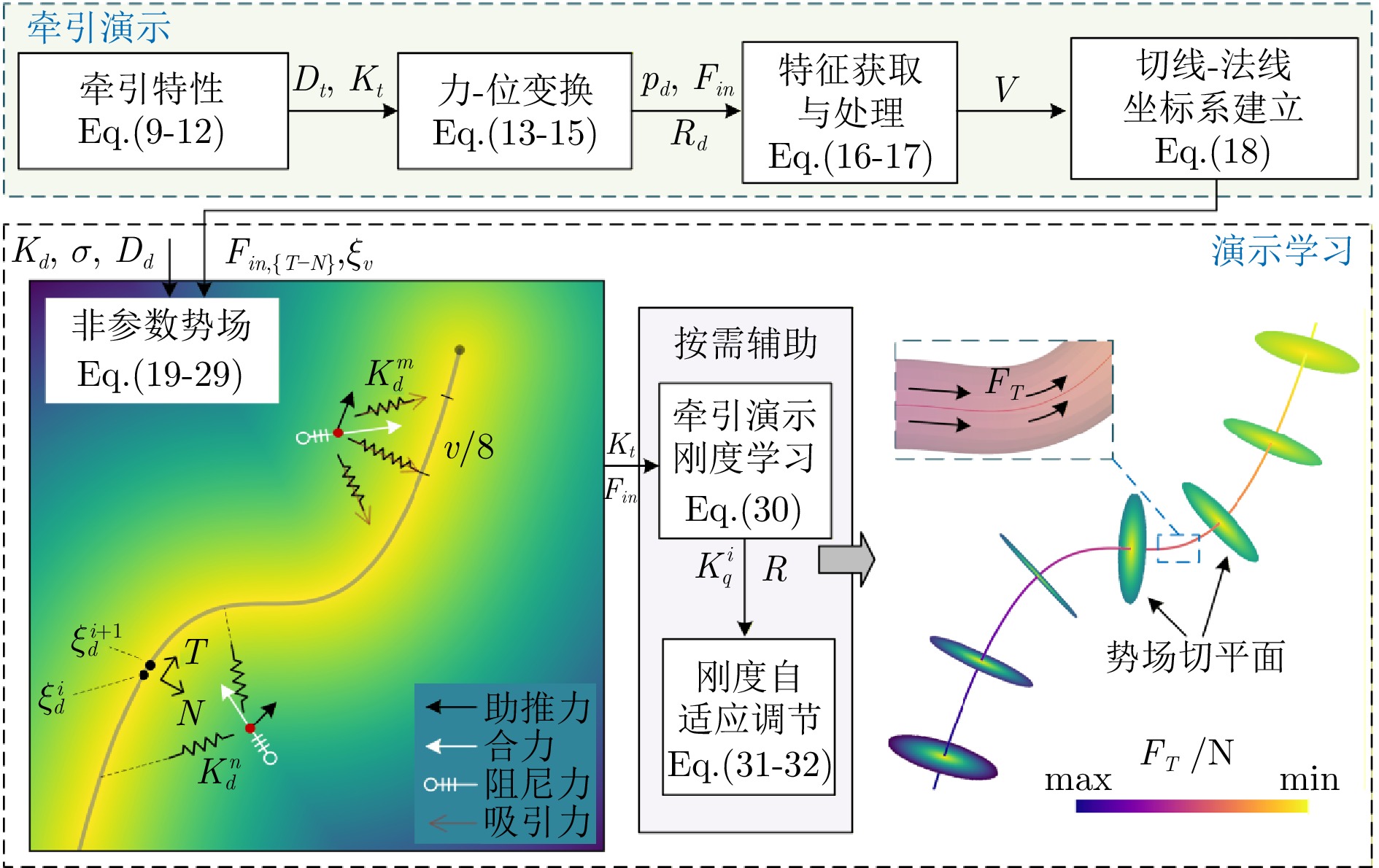
摘要: 具有治疗师般个性化、柔顺且安全交互的康复机器人可有效防止二次伤害并提升康复效率. 本文提出一种基于双臂机器人的新型上肢康复框架, 用于实现机器人治疗师般的交互. 首先, 以安全性为首要目标, 建立七自由度上肢运动学模型, 用于评估上肢末端以及前臂后端的可达训练空间; 利用双臂康复的优势, 提出一种非冗余逆运动学方法以约束关节运动角度, 进而构建任务-关节双重约束下的安全机制. 其次, 考虑个性化与柔顺交互, 设计了一种基于势场的按需辅助控制策略, 使双臂机器人能够从单次演示中学习治疗师的个性化牵引特性, 并根据上肢的运动能力和训练参与度提供自适应柔顺辅助. 实验结果表明, 所提方法兼具末端牵引式康复机器人动作适应性高、接触少以及外骨骼式康复机器人精准空间训练的特点, 并能够根据上肢训练状态实施按需辅助. 随着双臂及人形机器人的应用越来越广泛, 所提出的方法为机器人在医院和家庭环境中实现治疗师般个性化、柔顺且安全的康复训练提供了一条新途径.Abstract: Rehabilitation robots with therapist-like personalized, compliant, and safe interaction can effectively prevent secondary injuries and improve rehabilitation efficiency. This paper presents a novel upper-limb rehabilitation framework based on a dual-arm robot to achieve therapist-like interaction. First, with safety as the primary objective, a 7-DOF upper-limb kinematic model is established to evaluate the reachable training spaces of the upper-limb end and the rear end of the forearm. Taking advantage of dual-arm rehabilitation, a non-redundant inverse kinematics method is proposed to constrain joint angles, thereby constructing a safety mechanism under task-joint dual constraints. Second, considering personalized and compliant interaction, a potential-field-based assist-as-needed control strategy is designed. It enables the dual-arm robot to learn therapist-specific traction characteristics from a single demonstration and provide adaptive compliant assistance according to the subject’s motor ability and engagement. Experimental results show that the proposed method combines the high motion adaptability and minimal physical contact of end-effector-based rehabilitation robots with the precise spatial training capability of exoskeleton robots. It can also implement assist-as-needed training based on the upper limb’s training state. As dual-arm and humanoid robots become more widely adopted, the proposed scheme provides a new pathway for delivering therapist-like interaction in clinical and home settings.
-
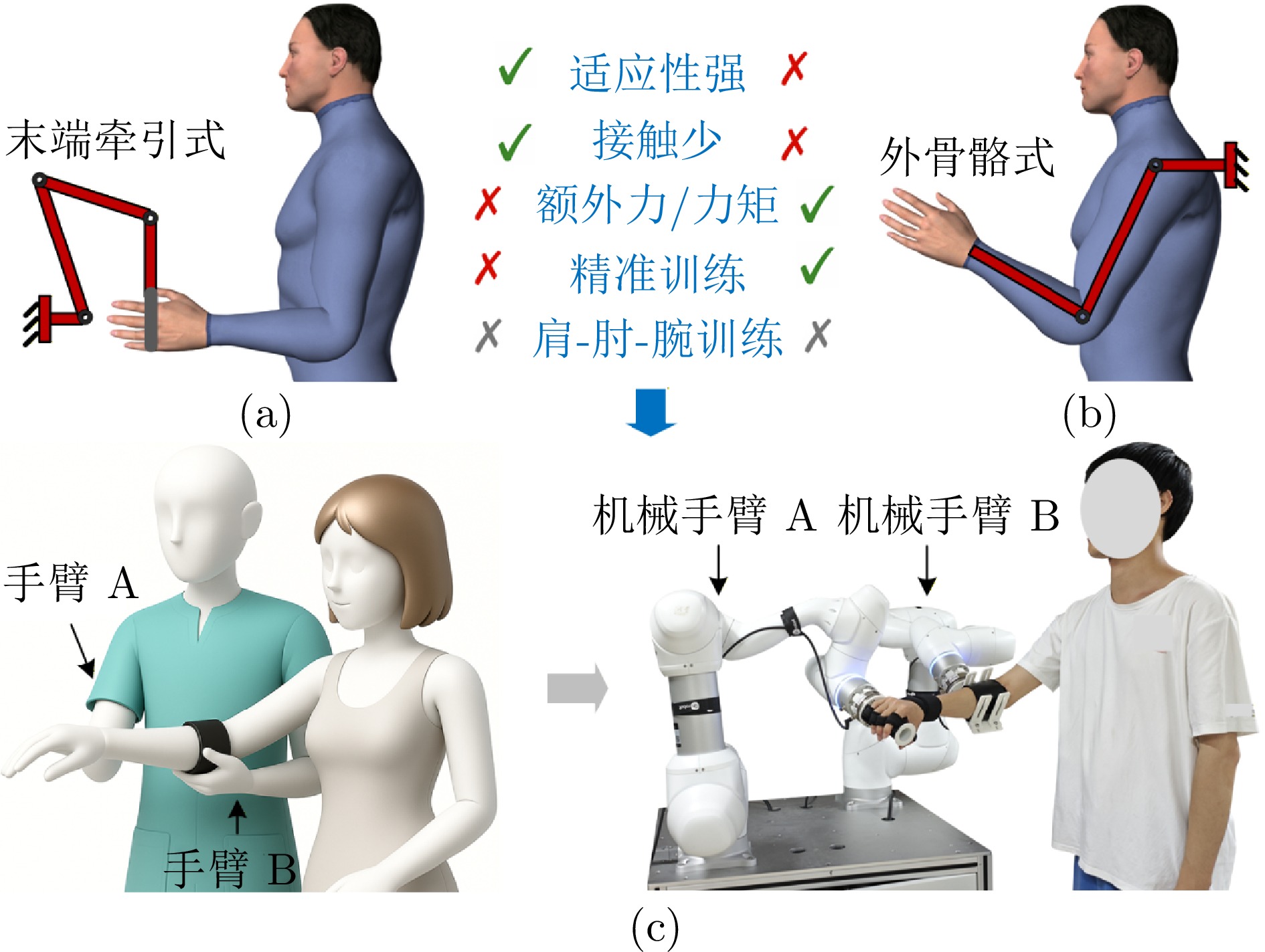
图 1 当前两种上肢康复机器人与所提出受治疗师启发的双臂康复机器人. (a)末端牵引式康复机器人; (b)外骨骼式康复机器人; (c)双臂康复机器人
Fig. 1 Current two types of upper-limb rehabilitation robots and the proposed therapist-inspired dual-arm rehabilitation robot. (a) End-effector rehabilitation robot; (b) Exoskeleton rehabilitation robot; (c) Dual-arm rehabilitation robot
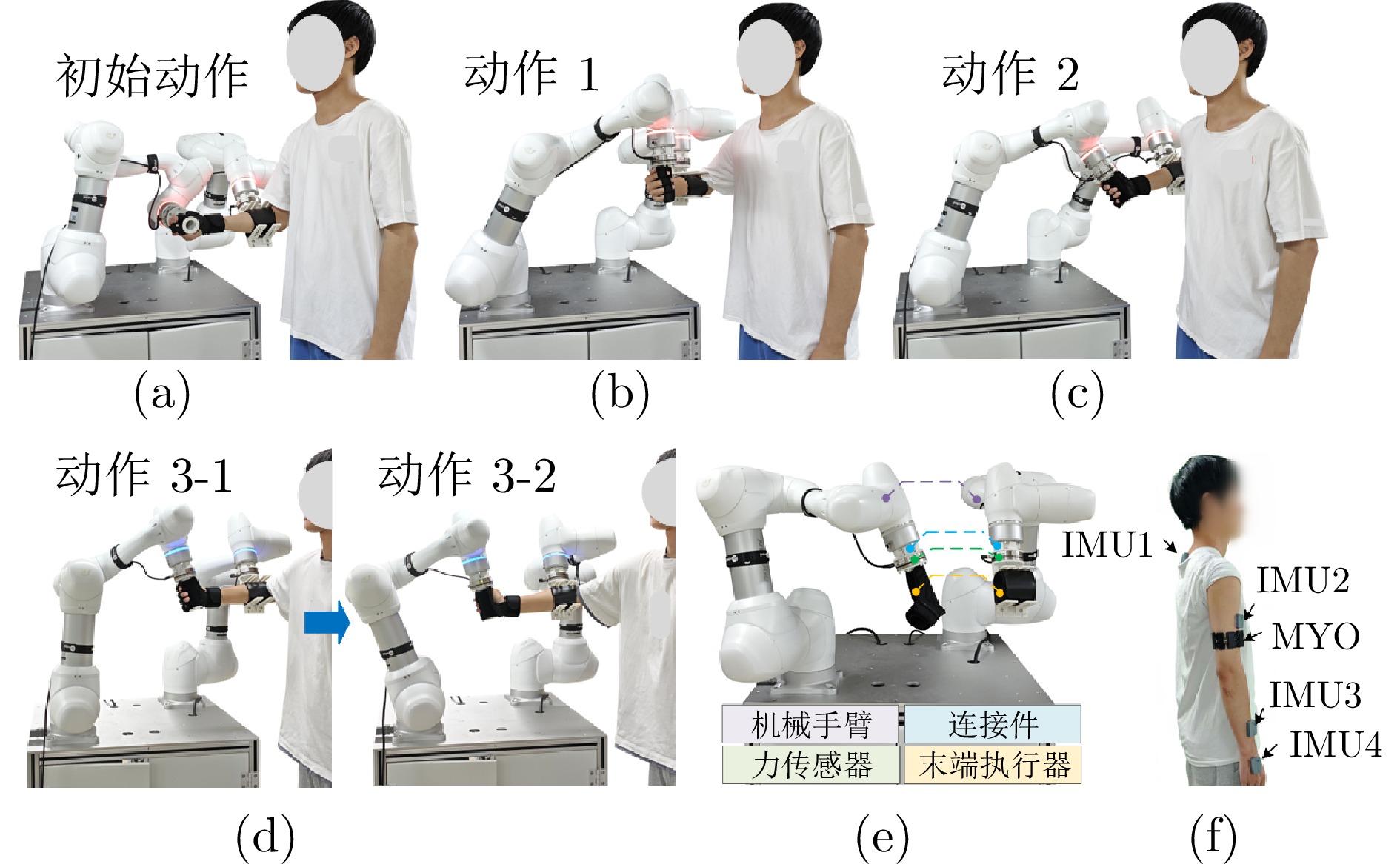
图 4 (a~d)训练动作1~3; (e)双臂康复机器人平台; (f) IMU和EMG传感器放置部位
Fig. 4 (a~d) Training motions 1~3; (e) Dual-arm rehabilitation robot platform; (f) Placement locations of the IMU and EMG sensors
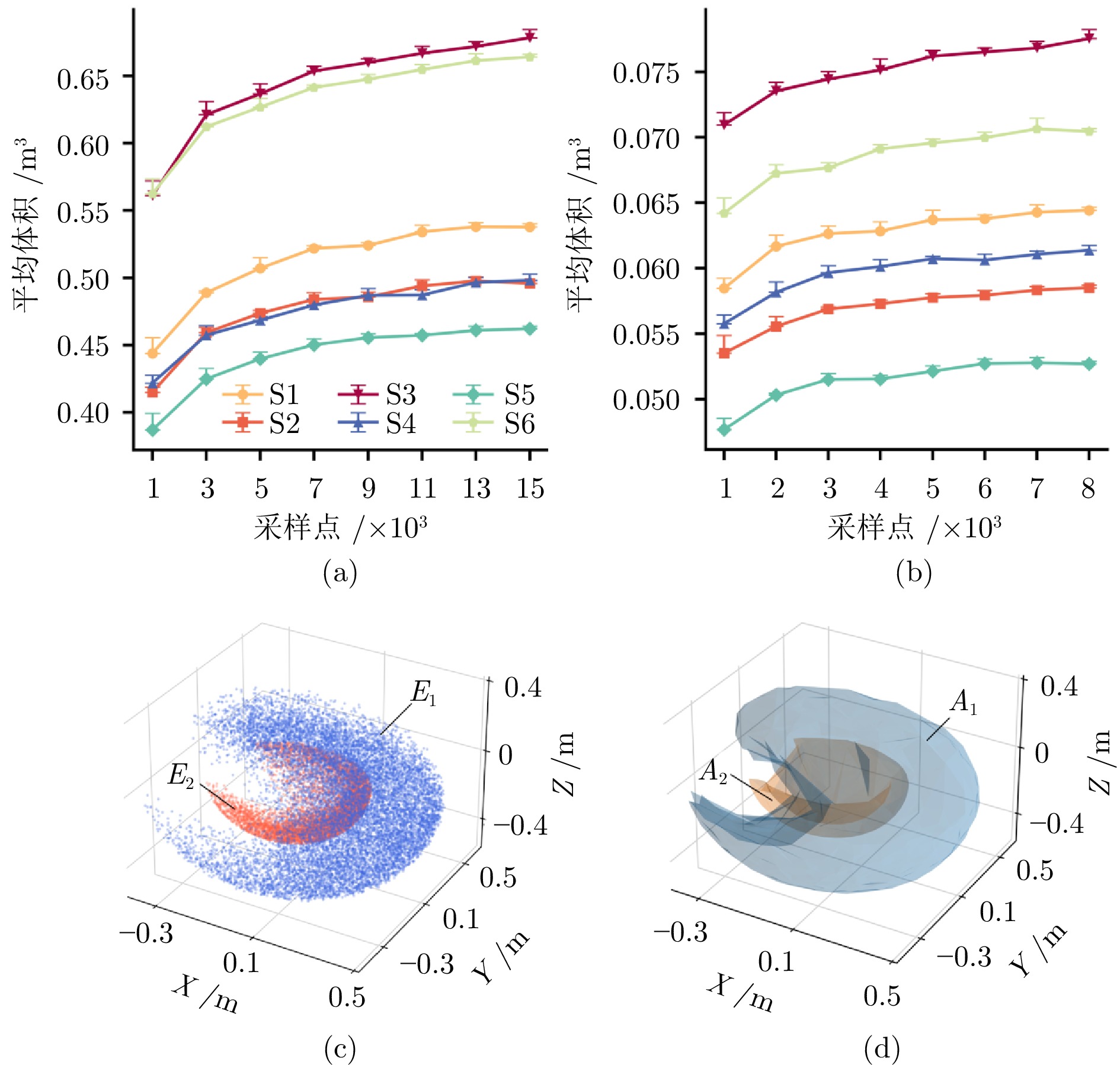
图 5 参数选择与可达训练空间构建效果. (a~b)可达训练空间$ A_1 $、$ A_2 $体积与采样点数之间的关系;(c~d)受试者3蒙特卡洛$ E_1 $、$ E_2 $点集与可达训练空间$ A_1 $、$ A_2 $构建效果
Fig. 5 Parameter selection and reachable training space construction effects. (a~b) Relationship between the volumes of reachable training spaces $A_1$ and $A_2$ and the number of sampling points; (c~d) Construction effects of the Monte Carlo point sets $E_1$ and $E_2$ and the reachable training spaces $A_1$ and $A_2$ for Subject 3
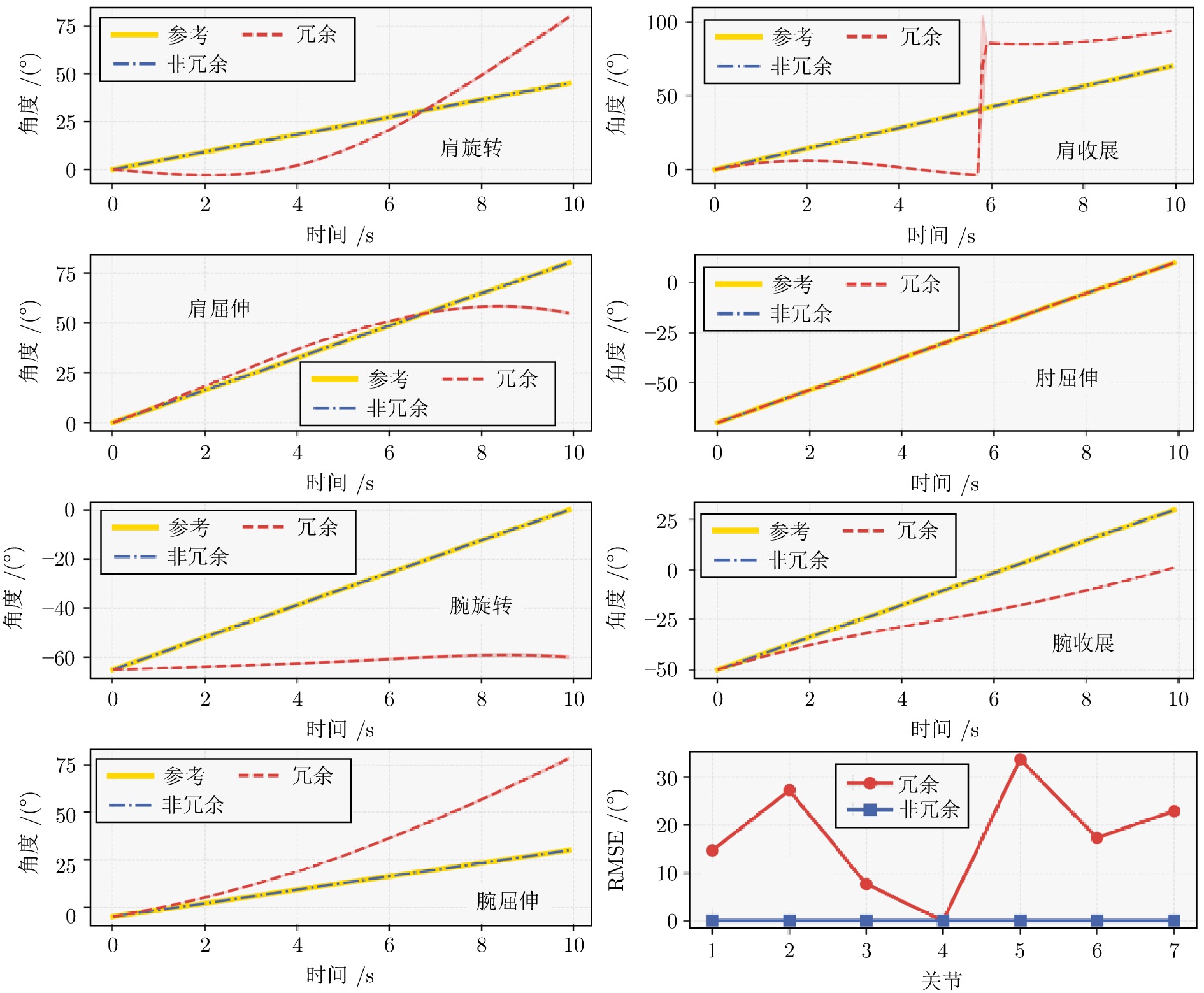
图 6 所提非冗余和冗余关节空间约束效果对比
Fig. 6 Comparison of the proposed non-redundant and redundant joint-space constraint effects
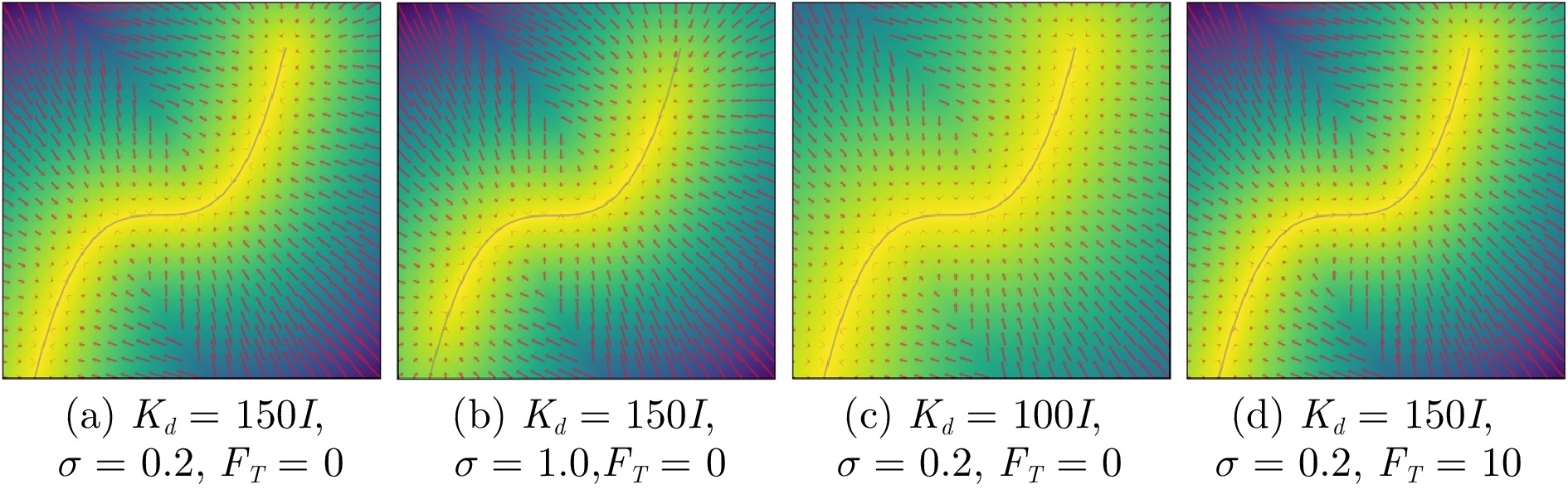
图 7 不同参数影响下的势场可视化效果
Fig. 7 Visualization effects of the potential field under different parameter settings
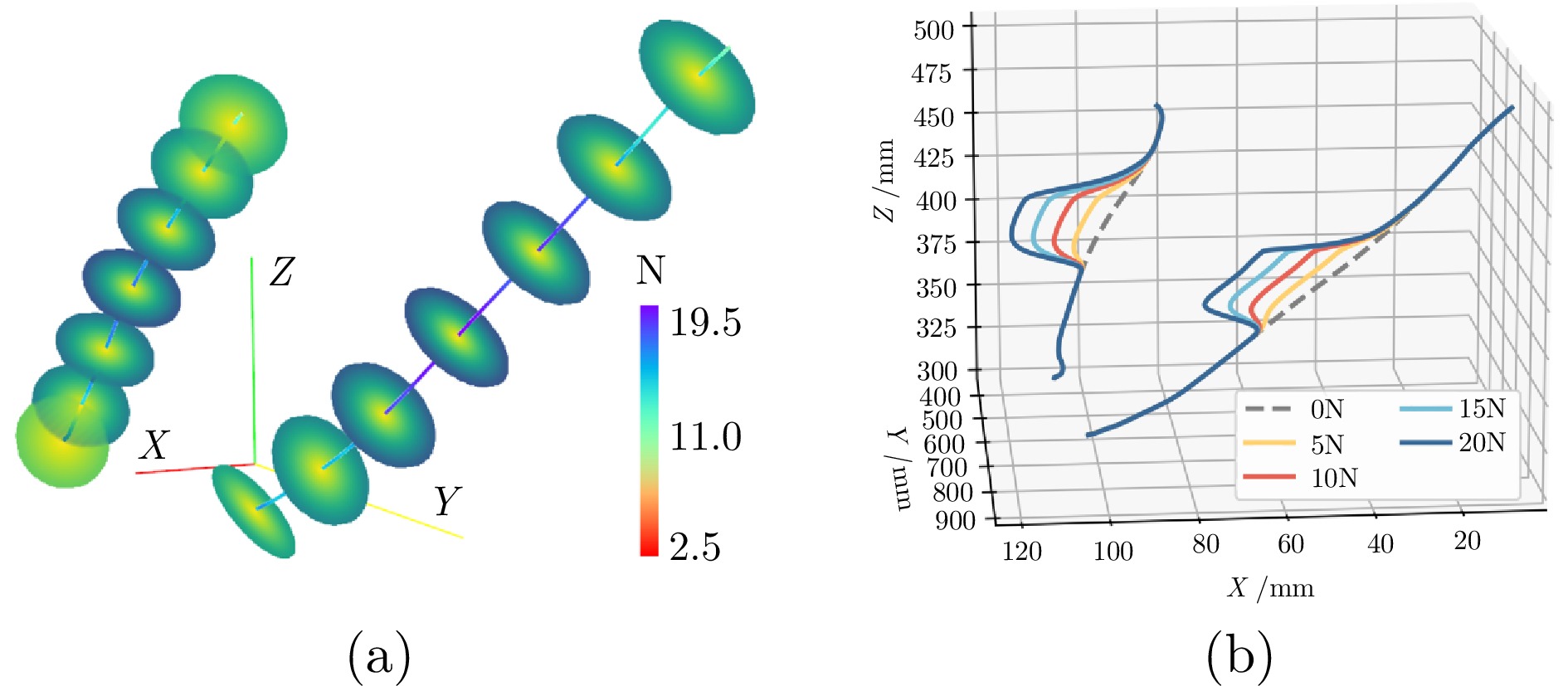
图 8 (a)康复训练2下受试者3对应的势场可视化效果; (b)不同程度扰动下系统的柔顺约束效果
Fig. 8 (a) Visualization effect of the potential field corresponding to Subject 3 during rehabilitation training 2; (b) Compliant constraint effects of the system under different levels of perturbation
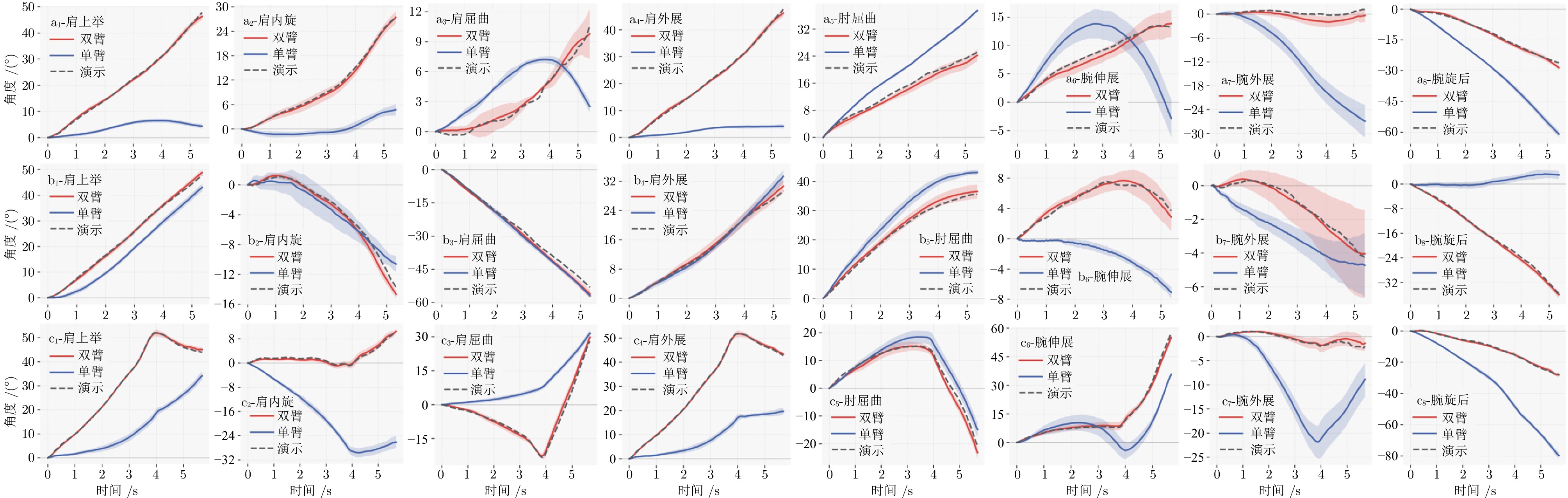
图 9 关节空间下所提方法与基线方法训练效果对比
Fig. 9 Comparison of training performance in joint space between the proposed and baseline methods
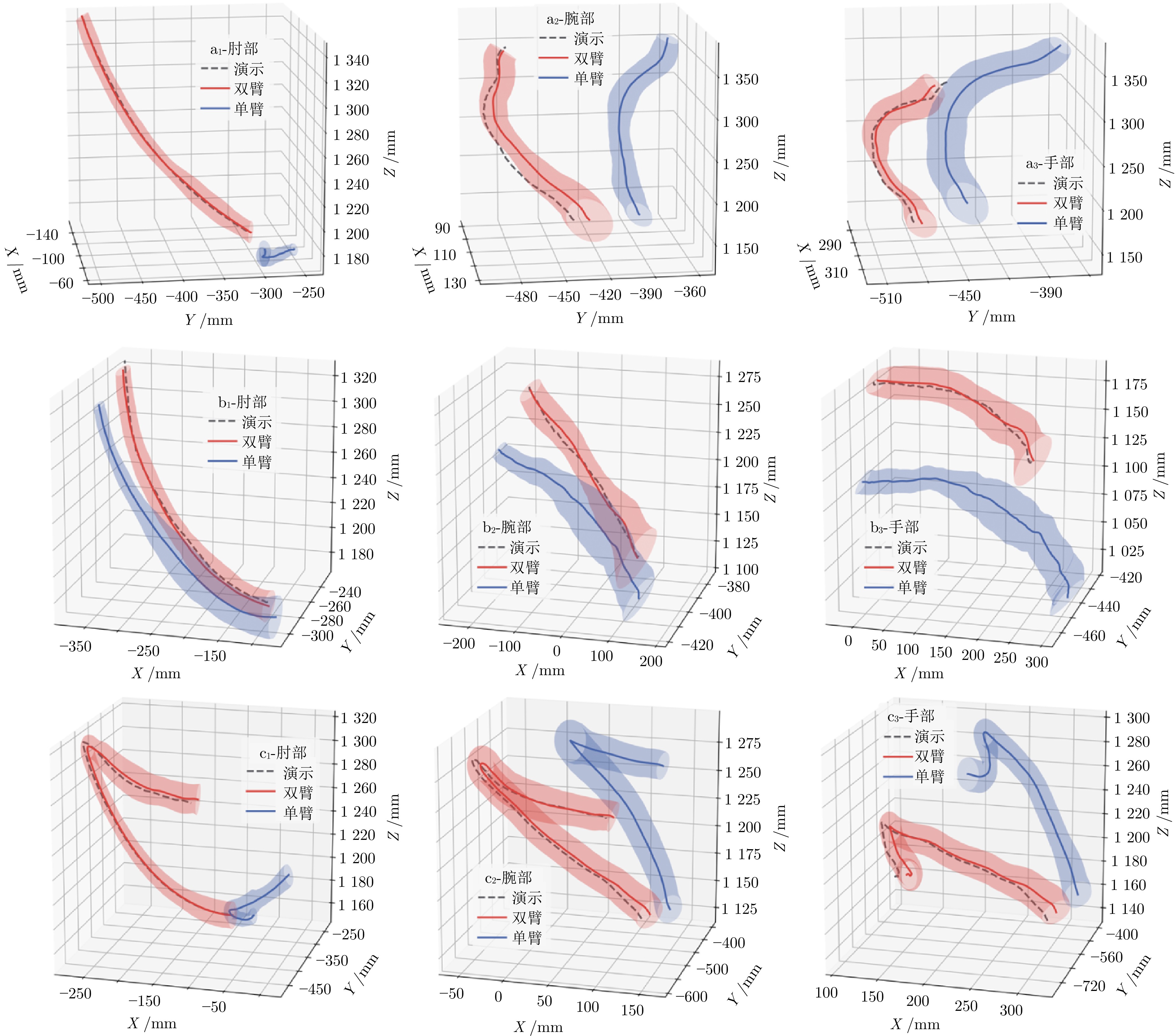
图 10 任务空间下所提方法与基线方法训练效果对比
Fig. 10 Comparison of training performance in task space between the proposed and baseline methods
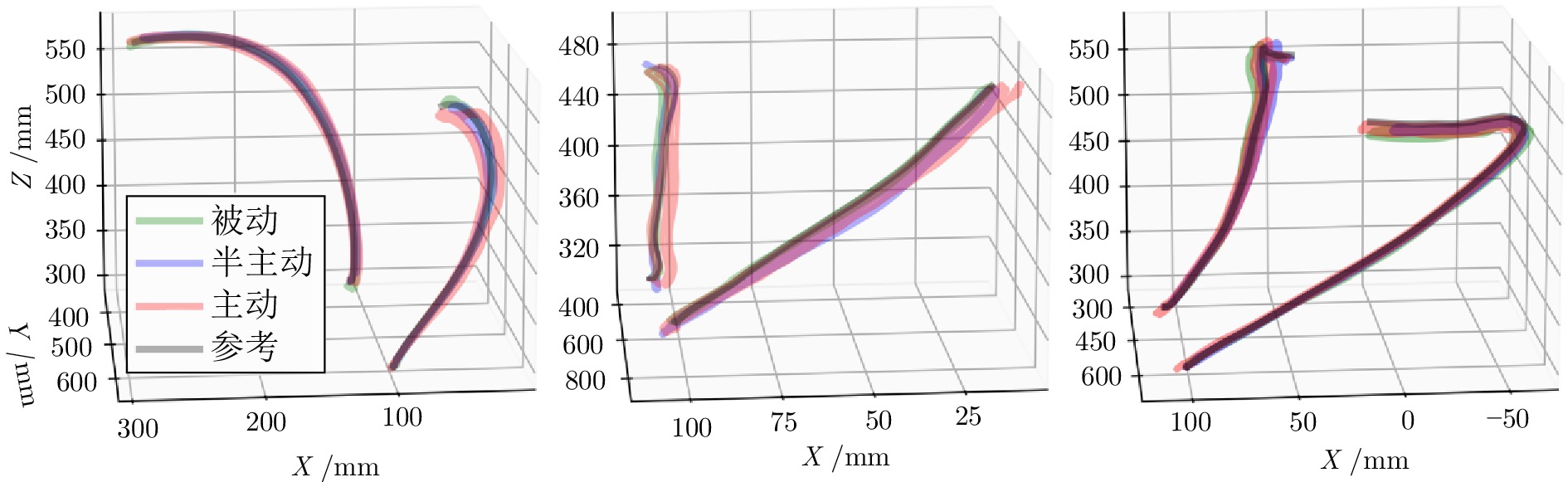
图 11 三种不同模式下训练1-3对应的空间轨迹
Fig. 11 Spatial trajectories corresponding to training motions 1–3 under three different modes
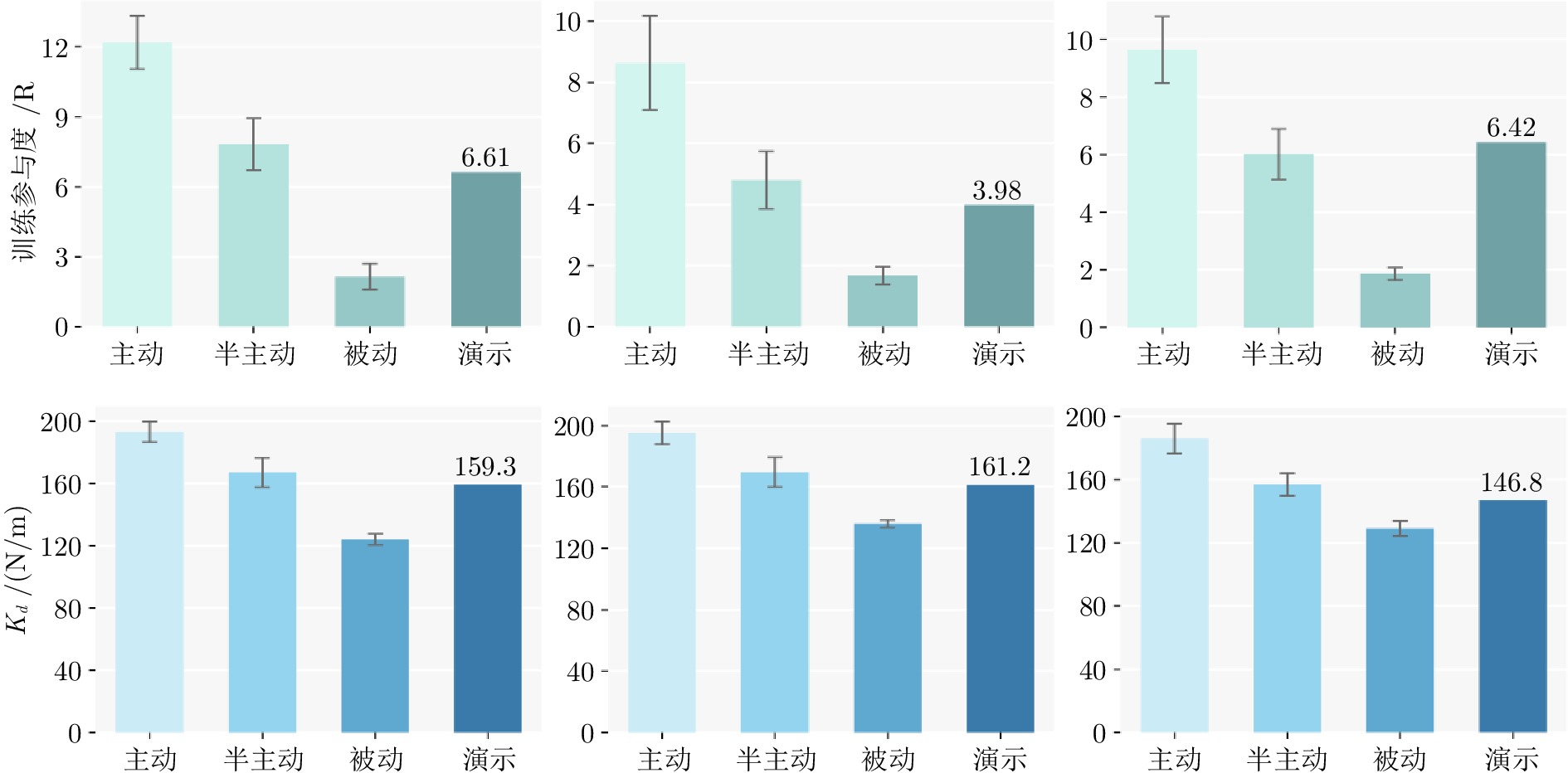
图 12 三种不同模式下训练1-3的训练参与度与交互刚度之间的关系
Fig. 12 Relationship between training participation and interaction stiffness for training motions 1–3 under three different modes
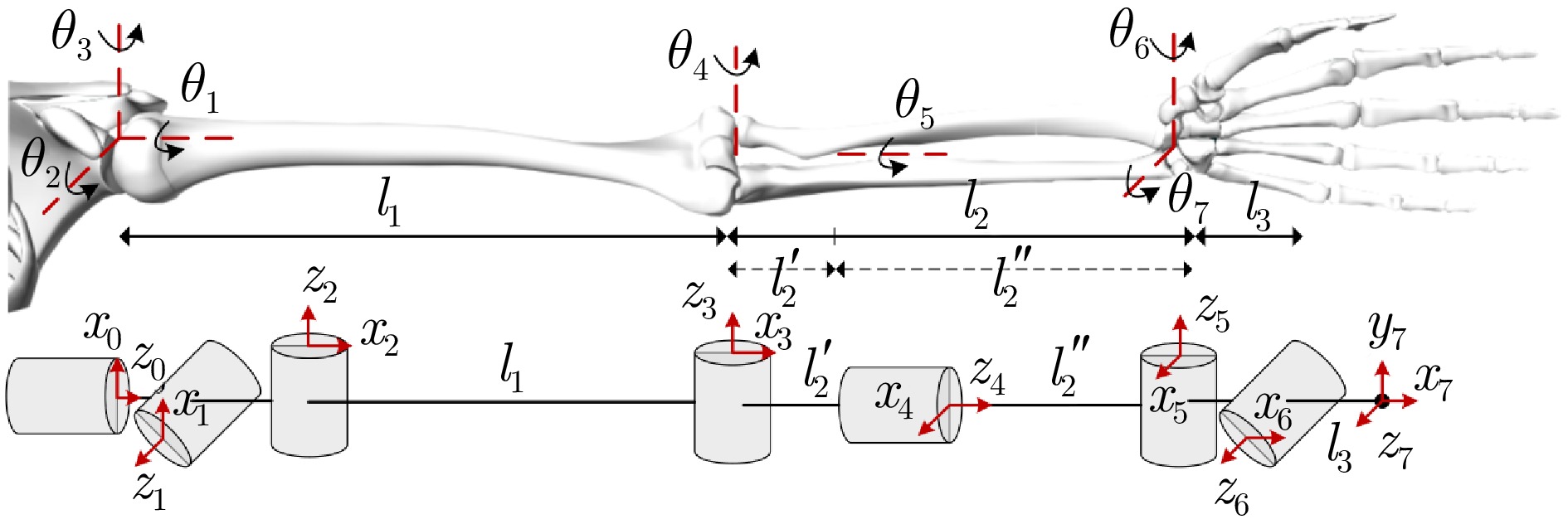
表 1 上肢运动学模型D-H参数
Table 1 D-H parameters of the upper limb kinematic model
关节 $ \theta_{i}(^\circ) $ $ a_{i} $ $ d_{i} $ $ \alpha_{i}(^\circ) $ 范围(°) 肩旋转 $ \theta_{1} $ 0 0 90 −90−80 肩收展 $ \theta_{2} $−90 0 0 −90 0−90 肩屈伸 $ \theta_{3} $ $ l_1 $ 0 0 −60−90 肘屈伸 $ \theta_{4} $/$ \theta_{4} $+90 0/$ l_2' $ 0 −90 −90−45 腕旋转 $ \theta_{5} $ 0 $ l_2 $/$ l_2'' $ −90 −90−0 腕收展 $ \theta_{6} $−90 0 0 90 −80−45 腕屈伸 $ \theta_{7} $ $ l_3 $ 0 0 −15−45  下载: 导出CSV
下载: 导出CSV
表 2 关节空间下所提方法与基线方法训练效果对比
Table 2 Comparison of training performance between the proposed method and baseline methods in joint space
关节空间 训练1 训练2 训练3 双臂 基线 双臂 基线 双臂 基线 RMSE PCC RMSE PCC RMSE PCC RMSE PCC RMSE PCC RMSE PCC 肩上举 0.98 0.99 20.75 0.78 1.06 1.00 3.63 0.99 0.88 1.00 21.68 0.86 肩内旋 0.99 0.99 11.24 0.85 0.97 0.99 2.44 0.97 1.31 0.95 22.26 −0.37 肩屈曲 1.53 0.90 3.45 0.57 1.43 1.00 1.88 0.999 2.40 0.99 16.01 0.45 肩外展 0.87 1.00 21.43 0.93 0.97 0.99 2.55 0.99 0.85 1.00 22.69 0.94 肘屈曲 2.06 0.99 6.14 0.99 1.63 0.99 5.05 0.99 1.74 0.99 5.44 0.93 腕伸展 1.12 0.99 5.11 0.53 1.43 0.92 6.98 0.22 1.25 0.99 8.47 0.66 腕外展 1.07 0.67 12.31 0.05 1.14 0.78 1.95 0.54 0.83 0.83 14.31 0.20 腕旋后 1.06 0.99 16.20 0.99 1.05 0.99 21.53 −0.92 0.93 0.99 25.78 0.99
下载: 导出CSV
表 3 任务空间下所提方法与基线方法训练效果对比
Table 3 Comparison of training performance between the proposed method and baseline methods in task space
任务空间 训练1 训练2 训练3 双臂 基线 双臂 基线 双臂 基线 RMSE MAE RMSE MAE RMSE MAE RMSE MAE RMSE MAE RMSE MAE 肘部 5.89 4.64 92.74 78.76 6.28 5.04 25.24 21.32 8.94 6.84 101.89 91.70 腕部 6.75 5.52 46.85 38.43 8.88 6.98 32.87 28.46 9.87 7.87 54.60 47.19 手部 6.73 5.48 39.61 31.91 8.32 6.61 68.56 53.99 9.81 8.09 62.58 56.05
下载: 导出CSV
-
[1] Gallucci L, Sperber C, Guggisberg A G, Kaller C P, Heldner M R, Monsch A U, et al. Post-stroke cognitive impairment remains highly prevalent and disabling despite state-of-the-art stroke treatment. International Journal of Stroke, 2024, 19(8): 888−897 doi: 10.1177/17474930241238637 [2] Song X, Van De Ven S S, Liu L, Wouda F J, Wang H, Shull P B, et al. Activities of daily living-based rehabilitation system for arm and hand motor function retraining after stroke. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2022, 19: 621−631 doi: 10.1109/tnsre.2022.3156387 [3] Li X, He Y, Wang D, Rezaei M J. Stroke rehabilitation: From diagnosis to therapy. Frontiers in neurology, 2024, 15: Article No. 1402729 doi: 10.3389/fneur.2024.1402729 [4] Guatibonza A, Solaque L, Velasco A, Pe?uela L. Assistive robotics for upper limb physical rehabilitation: A systematic review and future prospects. Chinese Journal of Mechanical Engineering, 2024, 37(1): Article No. 69 doi: 10.1186/s10033-024-01056-y [5] Diaz F H, Borrás Pinilla C, García Cena C E. Exploring robotic technologies for upper limb rehabilitation: Current status and future directions. Journal of Sensor and Actuator Networks, 2025, 14(3): Article No. 48 doi: 10.3390/jsan14030048 [6] 彭亮, 侯增广, 王晨, 罗林聪, 王卫群. 康复辅助机器人及其物理人机交互方法. 自动化学报, 2018, 44(11): 2000−2010 doi: 10.16383/j.aas.2018.c180209Peng Liang, Hou Zeng-Guang, Wang Chen, Luo Lin-Cong, Wang Wei-Qun. Physical interaction methods for rehabilitation and assistive robots. Acta Automatica Sinica, 2018, 44(11): 2000−2010 doi: 10.16383/j.aas.2018.c180209 [7] Han S, Wang H, Yu H. Human–robot interaction evaluation-based AAN control for upper limb rehabilitation robots driven by series elastic actuators. IEEE Transactions on Robotics, 2023, 39(5): 3437−3451 doi: 10.1109/TRO.2023.3286073 [8] Wang C, Peng L, Hou Z G. A control framework for adaptation of training task and robotic assistance for promoting motor learning with an upper limb rehabilitation robot. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(12): 7737−7747 doi: 10.1109/TSMC.2022.3163916 [9] Najafi M, Rossa C, Adams K, Tavakoli M. Using potential field function with a velocity field controller to learn and reproduce the therapist's assistance in robot-assisted rehabilitation. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1622−1633 doi: 10.1109/TMECH.2020.2981625 [10] Xie C, Lyu Y, Li G, Tong R K Y, Xia H, Song R, et al. A cable-driven upper limb rehabilitation robot with muscle-synergy-based myoelectric controller. IEEE Transactions on Robotics, 2024, 40: 3199−3211 doi: 10.1109/TRO.2024.3411849 [11] Rossa C, Najafi M, Tavakoli M, Adams K. Robotic rehabilitation and assistance for individuals with movement disorders based on a kinematic model of the upper limb. IEEE Transactions on Medical Robotics and Bionics, 2021, 3(1): 190−203 doi: 10.1109/TMRB.2021.3050512 [12] 王晓峰, 李醒, 王建辉. 基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法. 自动化学报, 2016, 42(12): 1899−1914 doi: 10.16383/j.aas.2016.c160057Wang Xiao-Feng, Li Xing, Wang Jian-Hui. Active interaction exercise control of exoskeleton upper limb rehabilitation robot using model-free adaptive methods. Acta Automatica Sinica, 2016, 42(12): 1899−1914 doi: 10.16383/j.aas.2016.c160057 [13] Pan J, Astarita D, Baldoni A, Dell'Agnello F, Crea S, Vitiello N, et al. NESM-γ: An upper-limb exoskeleton with compliant actuators for clinical deployment. IEEE Robotics and Automation Letters, 2022, 7(3): 7708−7715 doi: 10.1109/LRA.2022.3183926 [14] Zarrin R S, Zeiaee A, Langari R. A variable-admittance assist-as-needed controller for upper-limb rehabilitation exoskeletons. IEEE Robotics and Automation Letters, 2024, 9(6): 113−124 doi: 10.1109/lra.2024.3398565 [15] Zimmermann Y, Sommerhalder M, Wolf P, Riener R, Hutter M. ANYexo 2.0: A fully actuated upper-limb exoskeleton for manipulation and joint-oriented training in all stages of rehabilitation. IEEE Transactions on Robotics, 2023, 39(3): 2131−2150 doi: 10.1109/TRO.2022.3226890 [16] Pehlivan A U, Losey D P, O'Malley M K. Minimal assist-as-needed controller for upper limb robotic rehabilitation. IEEE Transactions on Robotics, 2015, 32(1): 5903−5910 doi: 10.1109/tro.2015.2503726 [17] Zhang L, Yu Z, Su P, Li J, Ge R. Design of a parallel wrist rehabilitation robot and analysis of physiological effect on training. IEEE/ASME Transactions on Mechatronics, 2024, 29(5): 3401−3414 doi: 10.1109/TMECH.2023.3344181 [18] Hussain S, Jamwal P K, Van Vliet P, Ghayesh M H. State-of-the-art robotic devices for wrist rehabilitation: Design and control aspects. IEEE Transactions on human-machine systems, 2020, 50(5): 361−372 doi: 10.1109/THMS.2020.2976905 [19] Ovur S E, Demiris Y. Naturalistic robot-to-human bimanual handover in complex environments through multi-sensor fusion. IEEE Transactions on Automation Science and Engineering, 2023, 21(3): 3730−3741 doi: 10.1109/tase.2023.3284668/mm1 [20] Sirintuna D, Ozdamar I, Ajoudani A. Carrying the uncarriable: a deformation-agnostic and human-cooperative framework for unwieldy objects using multiple robots. IEEE International Conference on Robotics and Automation (ICRA), 2023, 7497−7503 [21] Fan Y, Li X, Zhang K, Qian C, Zhou F, Li T, et al. Learning robust skills for tightly coordinated arms in contact-rich tasks. IEEE Robotics and Automation Letters, 2024, 9(3): 2973−2980 doi: 10.1109/LRA.2024.3359542 [22] Ze Y, Chen Z, Wang W, Chen T, He X, Yuan Y, et al. Generalizable humanoid manipulation with 3d diffusion policies. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, 2873−2880 [23] Lv N, Liu J, Jia Y. Dynamic modeling and control of deformable linear objects for single-arm and dual-arm robot manipulations. IEEE Transactions on Robotics, 2022, 38(4): 2341−2353 doi: 10.1109/TRO.2021.3139838 [24] Yu M, Lv K, Zhong H, Song S, Li X. Global model learning for large deformation control of elastic deformable linear objects: An efficient and adaptive approach. IEEE Transactions on Robotics, 2022, 39(1): 417−436 doi: 10.1109/tro.2022.3200546 [25] Wang Z, Gan Y, Dai X. Assembly-oriented task sequence planning for a dual-arm robot. IEEE Robotics and Automation Letters, 2022, 7(3): 8455−8462 doi: 10.1109/LRA.2022.3183786 [26] Khansari-Zadeh S M, Khatib O. Learning potential functions from human demonstrations with encapsulated dynamic and compliant behaviors. Autonomous Robots, 2017, 41(1): 45−69 doi: 10.1007/s10514-015-9528-y -

 下载:
下载:

计量
- 文章访问数: 102
- HTML全文浏览量: 99
- 被引次数: 0
