

Continuous Time-varying Disturbance-rejection Control of Permanent Magnet Synchronous Motor Based on Fully Actuated System Theory
-
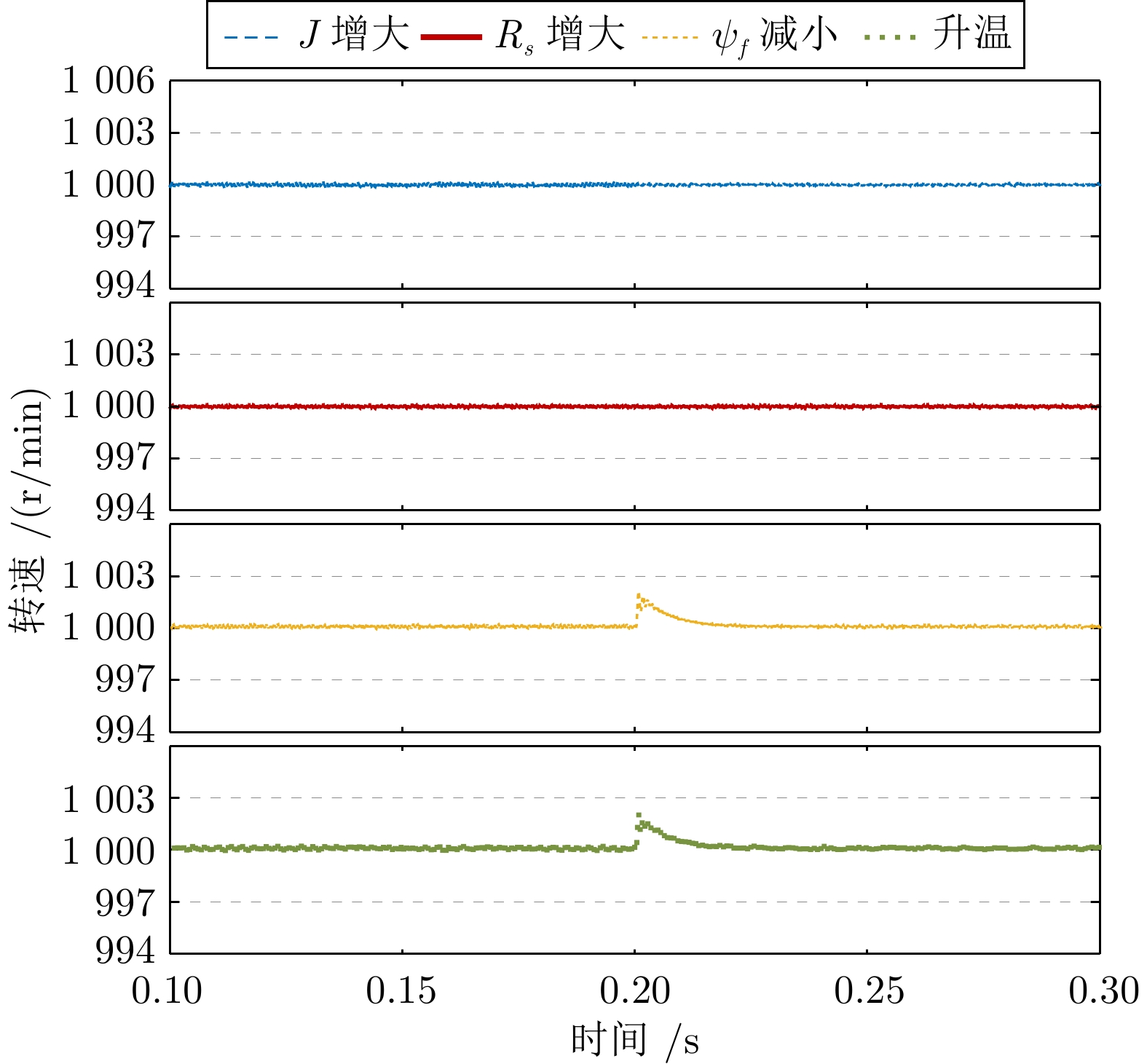
摘要: 针对永磁同步电机系统存在的参数不确定性、外部扰动及非完整约束特性导致的控制难题, 提出一种基于全驱系统(FAS) 理论的连续时变控制方法. 首先对转速误差动态模型进行微分分析, 将其转化为一个以$q$ 轴电压为输入的二阶FAS形式. 进而通过设计一个包含比例积分项的最优控制律, 主动塑造系统的闭环动态, 并引入一个非线性扰动观测器对集总扰动进行实时估计与前馈补偿. 进一步地, 基于Lyapunov稳定性理论证明所设计的闭环系统在时变扰动下是一致最终有界稳定的, 且在扰动变化率为零时是全局渐近稳定的. 最后给出系统化的参数整定流程, 将控制器与观测器参数直接与期望的响应速度、阻尼特性等性能指标相关联. 结果表明, 所提控制方法能够使系统状态快速、平滑地收敛至期望值, 在不同工况下均表现出良好的跟踪性能和扰动抑制能力, 验证了该方法的有效性和实用性.
-
关键词:
- 永磁同步电机 /
- 全驱系统理论 /
- 连续时变控制 /
- 非线性扰动观测器 /
- Lyapunov稳定性理论
Abstract: A continuous time-varying control method based on fully actuated system (FAS) theory is proposed to address control challenges caused by parameter uncertainty, external disturbances, and incomplete constraint characteristics in permanent magnet synchronous motor systems. First, the speed error dynamic model undergoes differential analysis and is transformed into a second-order FAS form with q -axis voltage as input. Then, an optimal control law incorporating a proportional-integral term is designed to actively shape closed-loop dynamics. A nonlinear disturbance observer is introduced for real-time estimation and feedforward compensation of lumped disturbances. Furthermore, based on Lyapunov stability theory, it is proven that the designed closed-loop system achieves uniformly ultimately bounded stability under time-varying disturbances and exhibits global asymptotic stability when disturbance rates are zero. Finally, a systematic parameter tuning procedure is presented, directly relating controller and observer parameters to desired performance metrics such as response speed and damping characteristics. The results show that the proposed control method can quickly and smoothly converge the system state to the expected value, and exhibits good tracking performance and disturbance-rejection ability under different operating conditions, verifying the effectiveness and practicality of the proposed method. -
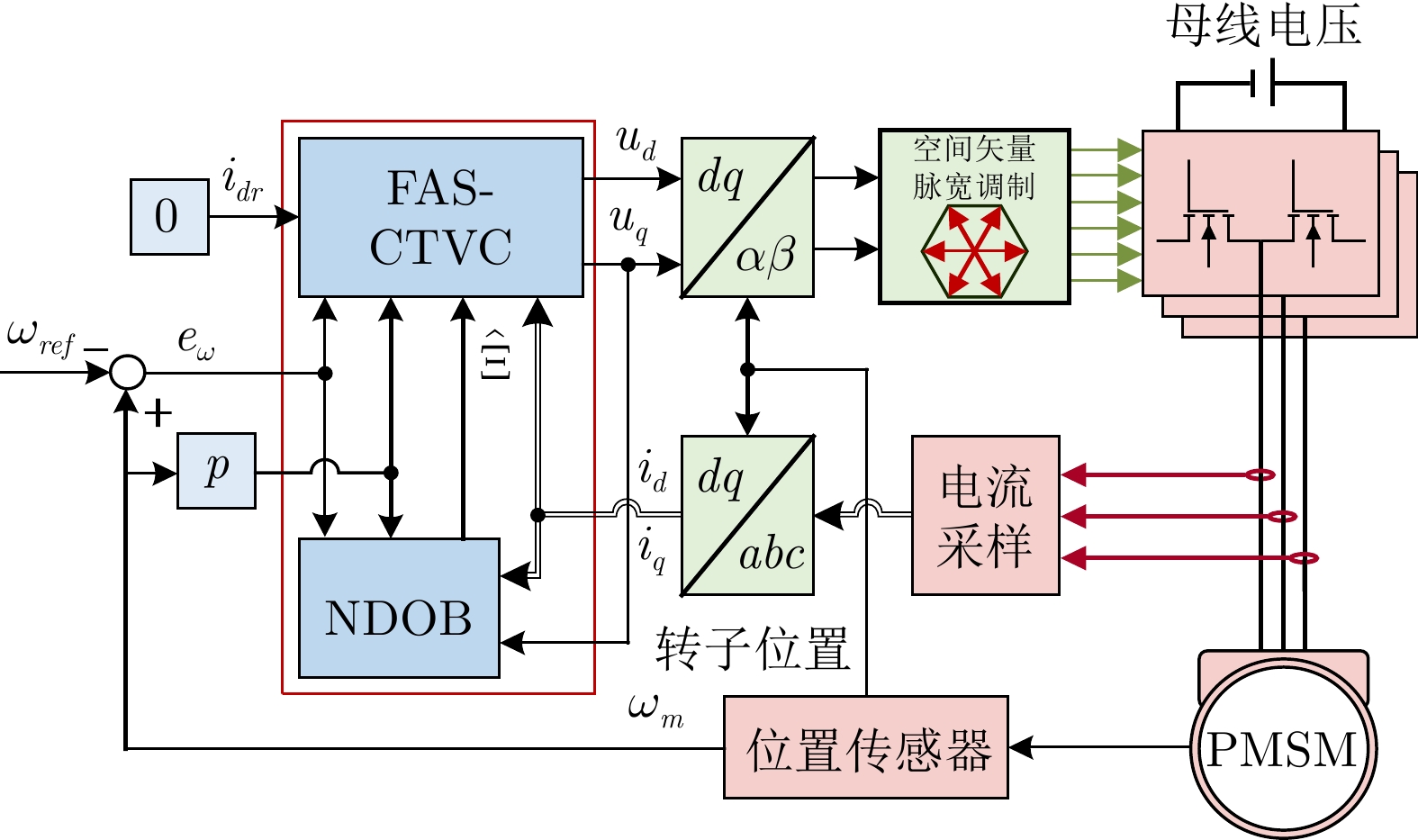
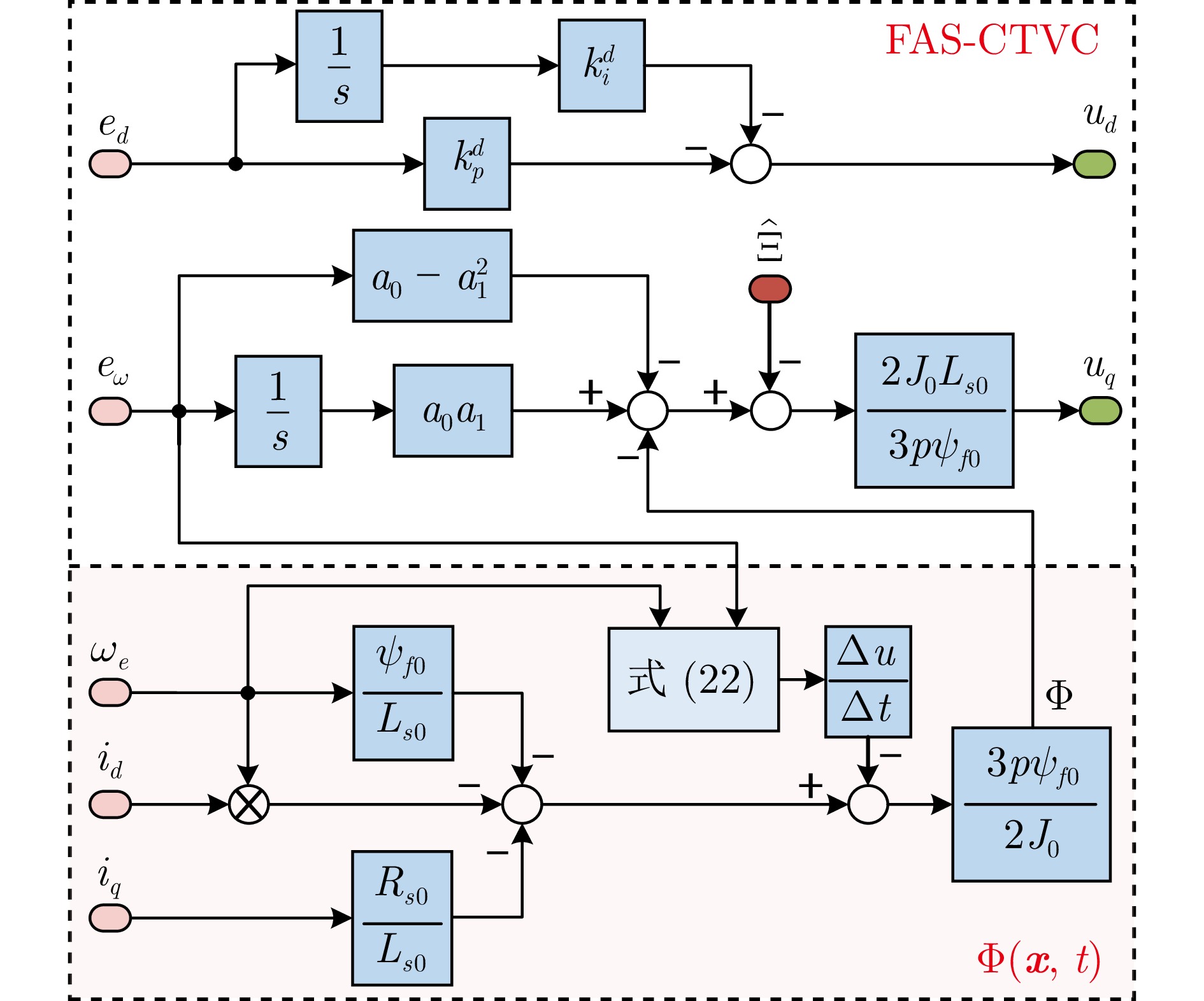
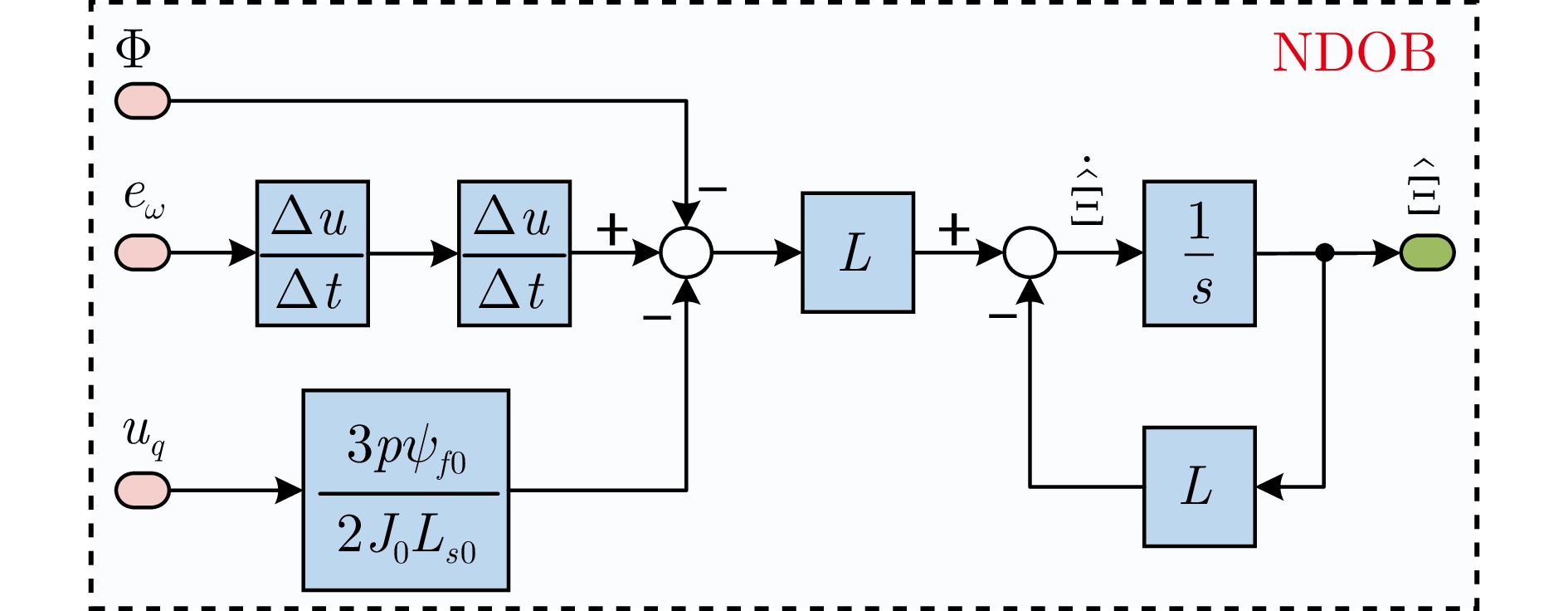
图 1 本文所提策略控制框图
Fig. 1 The control block diagram of the strategy proposed in this paper
表 1 PMSM参数
Table 1 PMSM parameters
参数 值 额定功率(kW) 1.5 额定转速(r/min) 3 000 额定转矩(N·m) 5 定子电阻($ {\Omega}$) 0.515 定子电感(mH) 1.715 永磁体磁链(Wb) 0.138333 转动惯量(kg·$\mathrm{m^2}$) 0.00063 粘性摩擦系数(N·m·s) 0.0008 极对数 4  下载: 导出CSV
下载: 导出CSV
表 2 控制器参数
Table 2 Parameters of controllers
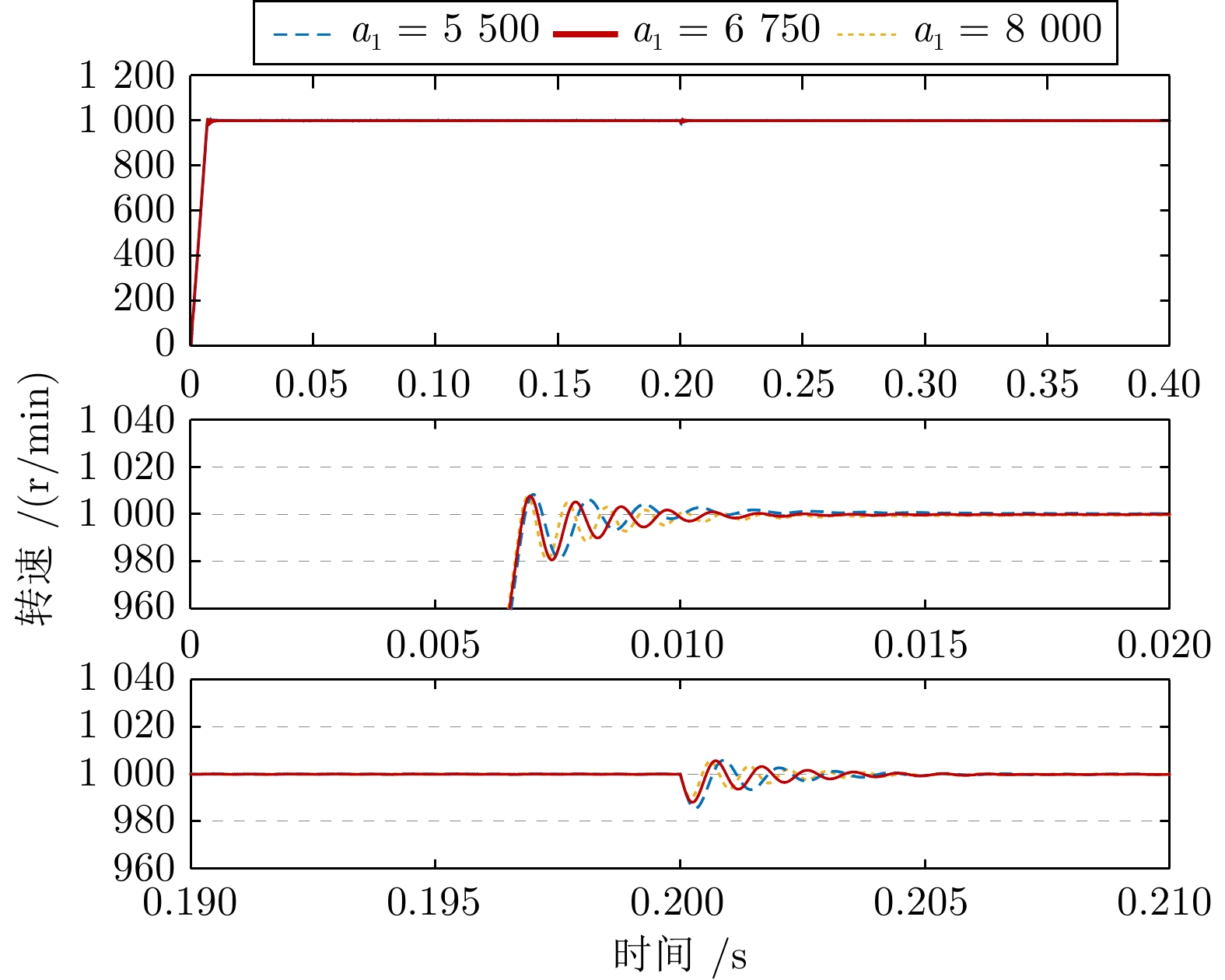
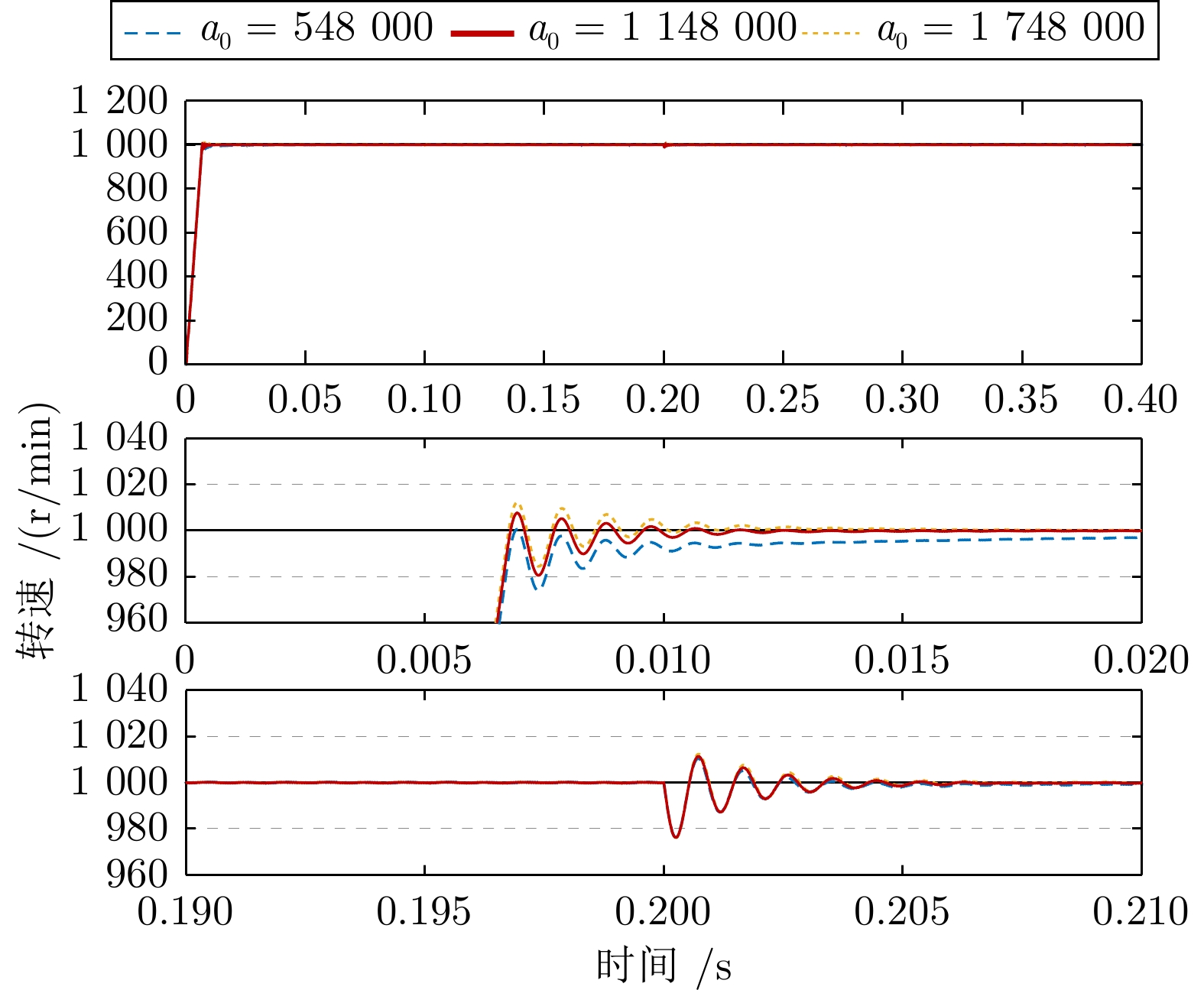
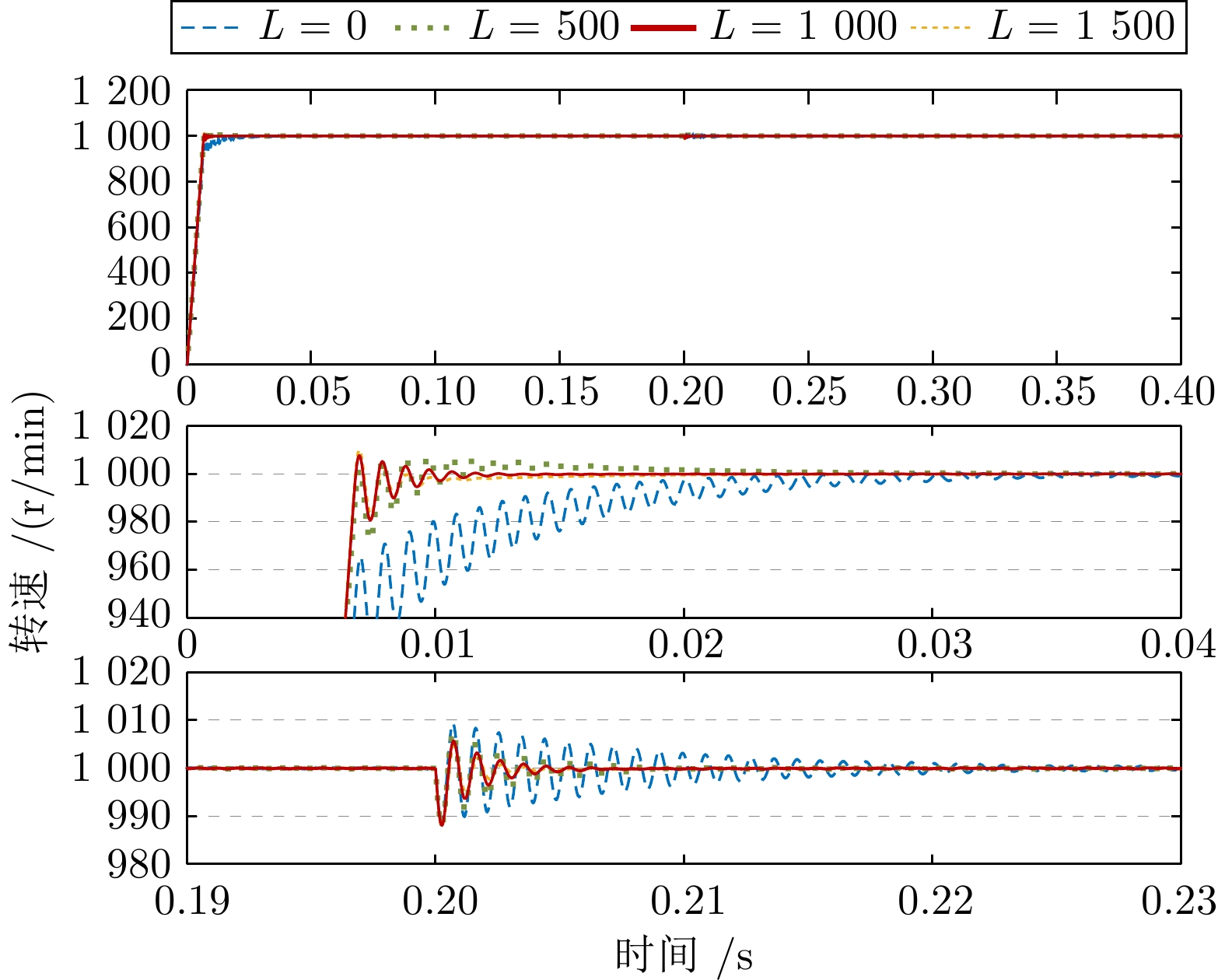
控制器 参数 值 FAS-CTVC 控制器参数$ a_0 $ 1 148 000 控制器参数$ a_1 $ 6 750 观测器增益$ L $ 1 050 PI 转速环比例项$ k_p^\omega $ 0.15 转速环积分项$ k_i^\omega $ 7.65 NESMC 控制器参数$ \eta $ 45 控制器参数$ \varepsilon $ 2 000 控制器参数$ q $ 2 150 控制器参数$ \alpha_1 $ 3 控制器参数$ \beta_1 $ 3
下载: 导出CSV
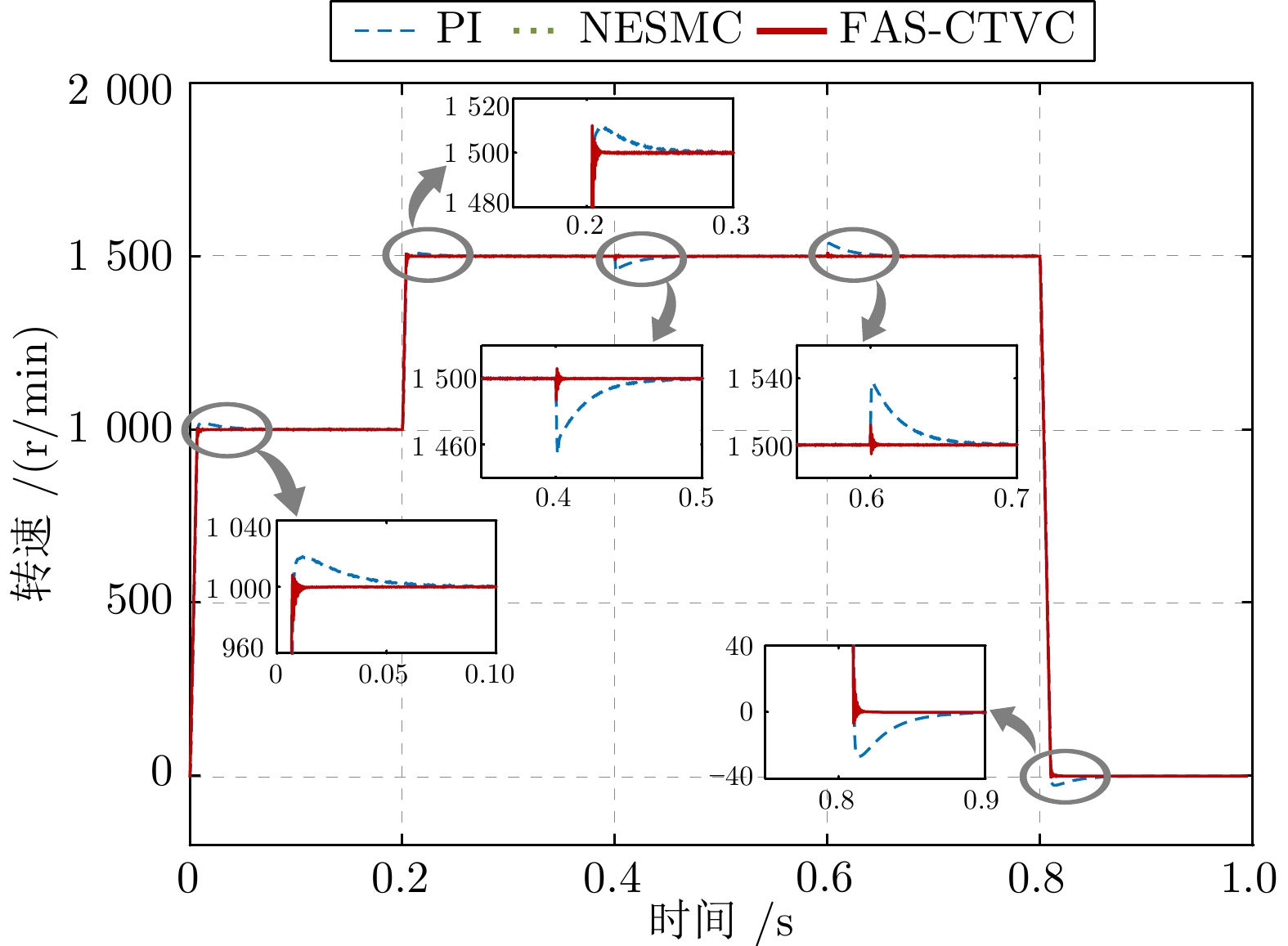
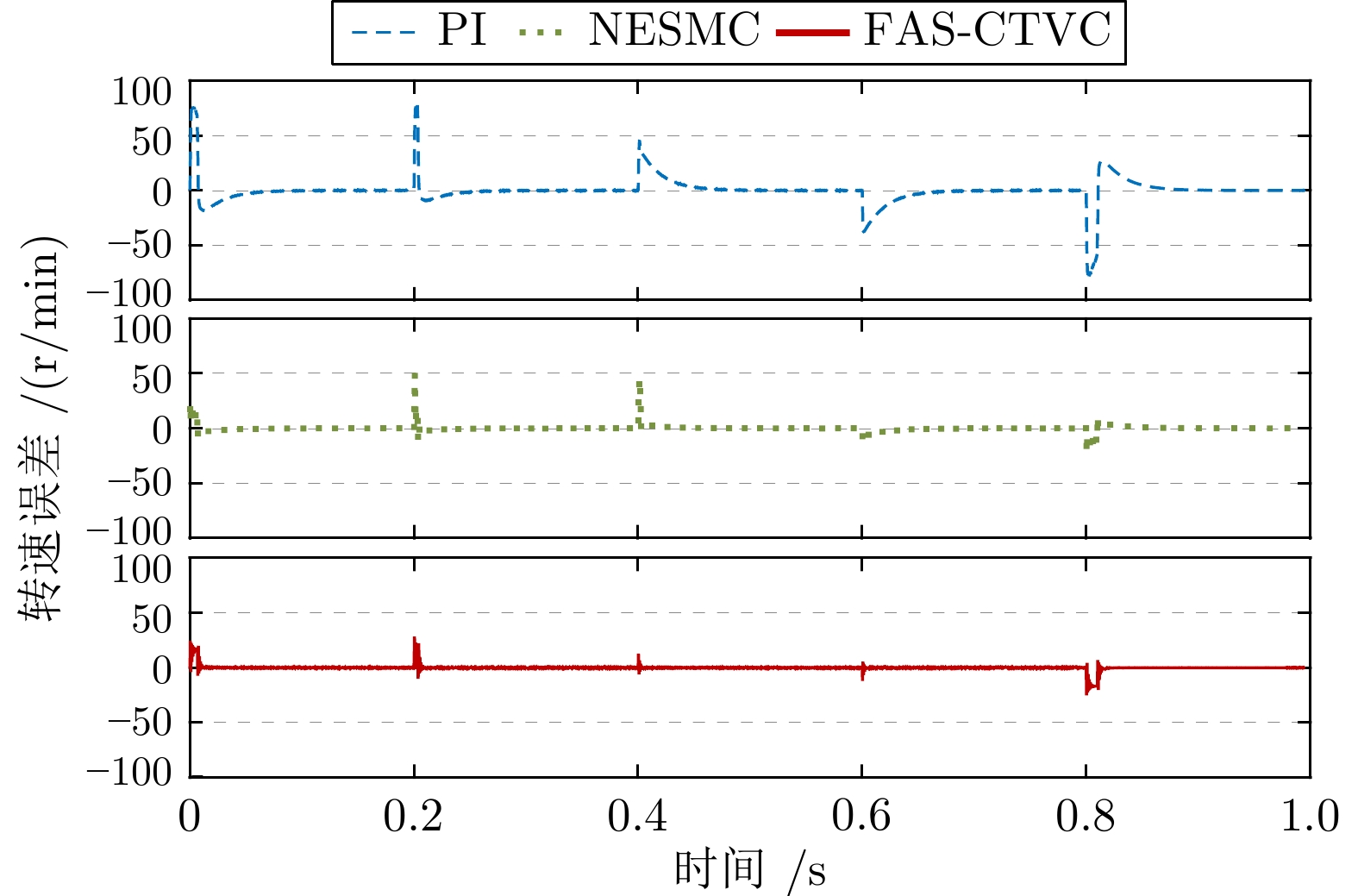
表 3 动态性能对比
Table 3 Dynamic performance comparison
工况 PI NESMC FAS-CTVC 超调/跌落(r/min) 稳定时间(s) 超调/跌落(r/min) 稳定时间(s) 超调/跌落(r/min) 稳定时间(s) 启动 +18 0.10 +8 0.08 +5 0.02 加速 +9 0.09 +9 0.08 +10 0.02 加载 $ - $46 0.11 $ - $45 0.08 $ - $13 0.01 减载 +38 0.10 +10 0.08 +12 0.01 减速 $ - $27 0.11 $ - $11 0.09 $ - $7 0.03
下载: 导出CSV
-
[1] Zhang L, Chen Z Y, Yu X H, Yang J, Li S H. Sliding-mode-based robust output regulation and its application in PMSM servo systems. IEEE Transactions on Industrial Electronics, 2023, 70(2): 1852−1860 [2] Gong C, Hu Y H, Gao J Q, Wang Y G, Yan L M. An improved delay-suppressed sliding-mode observer for sensorless vector-controlled PMSM. IEEE Transactions on Industrial Electronics, 2020, 67(7): 5913−5923 [3] 程勇, 李思卿, 李森豪. 永磁同步电机改进积分型时变滑模控制. 电机与控制学报, 2024, 28(7): 160−167 doi: 10.15938/j.emc.2024.07.016Cheng Yong, Li Si-Qing, Li Sen-Hao. Time-varying sliding mode control of permanent magnet synchronous motor based on improved integral sliding mode. Electric Machines and Control, 2024, 28(7): 160−167 doi: 10.15938/j.emc.2024.07.016 [4] Wang D H, Li B Q, Zhao Y Y. An adaptive SMO approach for low-chattering sensorless control of PMSM. IEEE Transactions on Power Electronics, 2025, 40(10): 15329−15338 doi: 10.1109/TPEL.2025.3535457 [5] Xu B, Zhang L, Ji W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives. IEEE Transactions on Transportation Electrification, 2021, 7(4): 2753−2762 [6] Zhao P Q, Li B Q, Zhang Z, Zhou X Y, Dai Z Y, Meng Y Q. Accurate estimation of positive-and negative-sequence components for three-phase grid voltage under disturbances. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11(3): 2952−2962 [7] Cao H Y, Deng Y T, Li H W, Wang J L, Liu X F, Sun Z, et al. Generalized active disturbance rejection with reduced-order vector resonant control for PMSM current disturbances suppression. IEEE Transactions on Power Electronics, 2023, 38(5): 6407−6421 [8] Zhang L, Tao R, Zhang Z X, Chien Y R, Bai J. PMSM non-singular fast terminal sliding mode control with disturbance compensation. Information Sciences, 2023, 642: Article No. 119040 [9] Ding S H, Hou Q K, Wang H. Disturbance-observer-based second-order sliding mode controller for speed control of PMSM drives. IEEE Transactions on Energy Conversion, 2023, 38(1): 100−110 [10] Tian M H, Wang B, Yu Y, Dong Q H, Xu D G. Discrete-time repetitive control-based ADRC for current loop disturbances suppression of PMSM drives. IEEE Transactions on Industrial Informatics, 2022, 18(5): 3138−3149 [11] 康尔良, 石晟金, 李胜. 基于频率自适应ADRC的PMSM不确定电流扰动抑制策略. 电机与控制学报, 2025, 29(4): 124−134Kang Er-Liang, Shi Sheng-Jin, Li Sheng. Suppression strategy for uncertain current disturbances in PMSM based on frequent adaptive active disturbance rejection controller. Electric Machines and Control, 2025, 29(4): 124−134 [12] Cao H Y, Deng Y T, Zuo Y F, Liu X F, Wang J L, Lee C H T. A variable structure ADRC for enhanced disturbance rejection and improved noise suppression of PMSM speed system. IEEE Transactions on Industrial Electronics, 2025, 72(5): 4481−4495 [13] Wu J, Zhang J D, Nie B C, Liu Y H, He X K. Adaptive control of PMSM servo system for steering-by-wire system with disturbances observation. IEEE Transactions on Transportation Electrification, 2022, 8(2): 2015−2028 [14] Talapiden K, Shakhin Y, Thao N G M, Duc do T. Digital disturbance observer design with comparison of different discretization methods for permanent magnet motor drives. IEEE Access, 2024, 12: 100892−100907 [15] Dai B, Wang Z. Disturbance observer-based sliding mode control using barrier function for output speed fluctuation constraints of PMSM. IEEE Transactions on Energy Conversion, 2024, 39(2): 1192−1201 [16] Cheng C, Liu L, Ding S H. Iterative learning observer-based composite SOSM control for PMSM speed regulation problem with mismatched disturbances. IEEE Transactions on Power Electronics, 2024, 39(8): 9470−9480 [17] Ma R Z, Guo X, Zhang Y J, Gui J B. PMSG offshore wind power system control using SMC and ADRC with fast SVPWM in complicated environment. Electrical Engineering, 2023, 105(5): 2751−2767 [18] Yang T, Deng Y T, Li H W, Sun Z, Cao H Y, Wei Z E. Fast integral terminal sliding mode control with a novel disturbance observer based on iterative learning for speed control of PMSM. ISA Transactions, 2023, 134: 460−471 [19] Cao H Y, Deng Y T, Zuo Y F, Li H W, Wang J L, Liu X F, et al. Improved ADRC with a cascade extended state observer based on quasi-generalized integrator for PMSM current disturbances attenuation. IEEE Transactions on Transportation Electrification, 2024, 10(1): 2145−2157 [20] Yin Y F, Liu L, Vazquez S, Xu R Q, Dong Z J, Liu J X. Disturbance and uncertainty attenuation for speed regulation of PMSM servo system using adaptive optimal control strategy. IEEE Transactions on Transportation Electrification, 2023, 9(2): 3410−3420 [21] Fan Y, Chen J L, Zhang Q S, Cheng M. An improved inertia disturbance suppression method for PMSM based on disturbance observer and two-degree-of-freedom PI controller. IEEE Transactions on Power Electronics, 2023, 38(3): 3590−3599 [22] Gil J, You S, Lee Y, Kim W. Nonlinear sliding mode controller using disturbance observer for permanent magnet synchronous motors under disturbance. Expert Systems With Applications, 2023, 214: Article No. 119085 [23] Duan G R. High-order fully actuated system approaches: Part I. Models and basic procedure. International Journal of Systems Science, 2021, 52(2): 422−435 [24] Duan G R. A FAS approach for stabilization of generalized chained forms: Part 2. Continuous control laws. Science China Information Sciences, 2024, 67(3): Article No. 132201 [25] Duan G R. A FAS approach for stabilization of generalized chained systems: Multi-vector case. Science China Information Sciences, 2025, 68(6): Article No. 162201 [26] Duan G R. Fully actuated system approach for control: An overview. IEEE Transactions on Cybernetics, 2024, 54(12): 7285−7306 [27] Cui K X, Duan G R, Hou M Z. Discrete-time model reference tracking control for a class of combined spacecraft: A high-order fully actuated system approach. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 6966−6977 [28] Li M S, Zhang K, Ma Y H, Jiang B. Prescribed-time fault-tolerant control for the formation of quadrotors based on fully-actuated system approaches. International Journal of Systems Science, 2024, 55(12): 2541−2555 [29] Duan G R. High-order fully actuated system approaches: Part Ⅱ. Generalized strict-feedback systems. International Journal of Systems Science, 2021, 52(3): 437−454 [30] Li Z, Zhang Y, Zhang R. Prescribed error performance control for second-order fully actuated systems. Journal of Systems Science and Complexity, 2022, 35(2): 660−669 [31] Yu Y, Liu G P, Huang Y, Guerrero J M. Coordinated predictive secondary control for DC microgrids based on high-order fully actuated system approaches. IEEE Transactions on Smart Grid, 2024, 15(1): 19−33 [32] Li P, Duan G R. High-order fully actuated control approach for flexible servo systems using dynamical compensator. In: Proceedings of the 2nd Conference on Fully Actuated System Theory and Applications (CFASTA). Qingdao, China: IEEE, 2023. 862−867 [33] Lu S, Tsakalis K, Chen Y. Development and application of a novel high-order fully actuated system approach——Part I: 3-DOF quadrotor control. IEEE Control Systems Letters, 2023, 7: 1177−1182 [34] Zhao Q, Duan G R. Fully actuated system approach for 6DOF spacecraft control based on extended state observer. Journal of Systems Science and Complexity, 2022, 35(2): 604−622 [35] Yu Y, Liu G P, Huang Y, Guerrero J M. Distributed learning-based secondary control for islanded DC microgrids: A high-order fully actuated system approach. IEEE Transactions on Industrial Electronics, 2024, 71(3): 2990−3000 [36] Li P, Duan G R. High-order fully actuated control approach for servo systems based on dynamical compensator and extended state observer. IEEE/ASME Transactions on Mechatronics, 2024, 29(5): 3717−3726 [37] Li P, Duan G R. High-order fully actuated control approaches of flexible servo systems based on singular perturbation theory. IEEE/ASME Transactions on Mechatronics, 2023, 28(6): 3386−3397 -

 下载:
下载:

图(13) / 表(3)
计量
- 文章访问数: 281
- HTML全文浏览量: 178
- PDF下载量: 78
- 被引次数: 0
