

Finite-time Extended State Observer-based Adaptive Prescribed Performance Control for an Uncertain 2-DOF Helicopter System
-
摘要: 针对具有外部干扰的不确定二自由度直升机系统, 提出一种基于有限时间扩展状态观测器的自适应规定性能控制方法. 设计的规定性能函数和基于切换模型的变换误差克服了传统性能控制的初始误差限制. 然后, 引入有限时间扩展状态观测器来估计总扰动. 将变换误差与自适应非奇异快速终端滑模控制相结合, 规避了奇异性问题, 保障系统的性能. 此外, 通过Lyapunov方法验证系统的稳定性. 仿真和实验验证了所提控制策略的可行性和有效性.
-
关键词:
- 自适应规定性能控制 /
- 外部干扰 /
- 有限时间扩展状态观测器 /
- 二自由度直升机系统
Abstract: This paper proposes a finite-time extended state observer-based adaptive prescribed performance control method for an uncertain 2-DOF helicopter system with external disturbances. A designed prescribed performance function and a switching model based transformation error are employed to overcome initial error limitations in traditional performance control. Then, a finite-time extended state observer is introduced to estimate total disturbances. Integrating transformation error with adaptive non-singular fast terminal sliding mode control circumvents the singularity issue, ensuring prescribed system performance. Besides, system stability is validated via the Lyapunov method. The feasibility and effectiveness of the proposed control strategy are verified by simulations and experiments. -
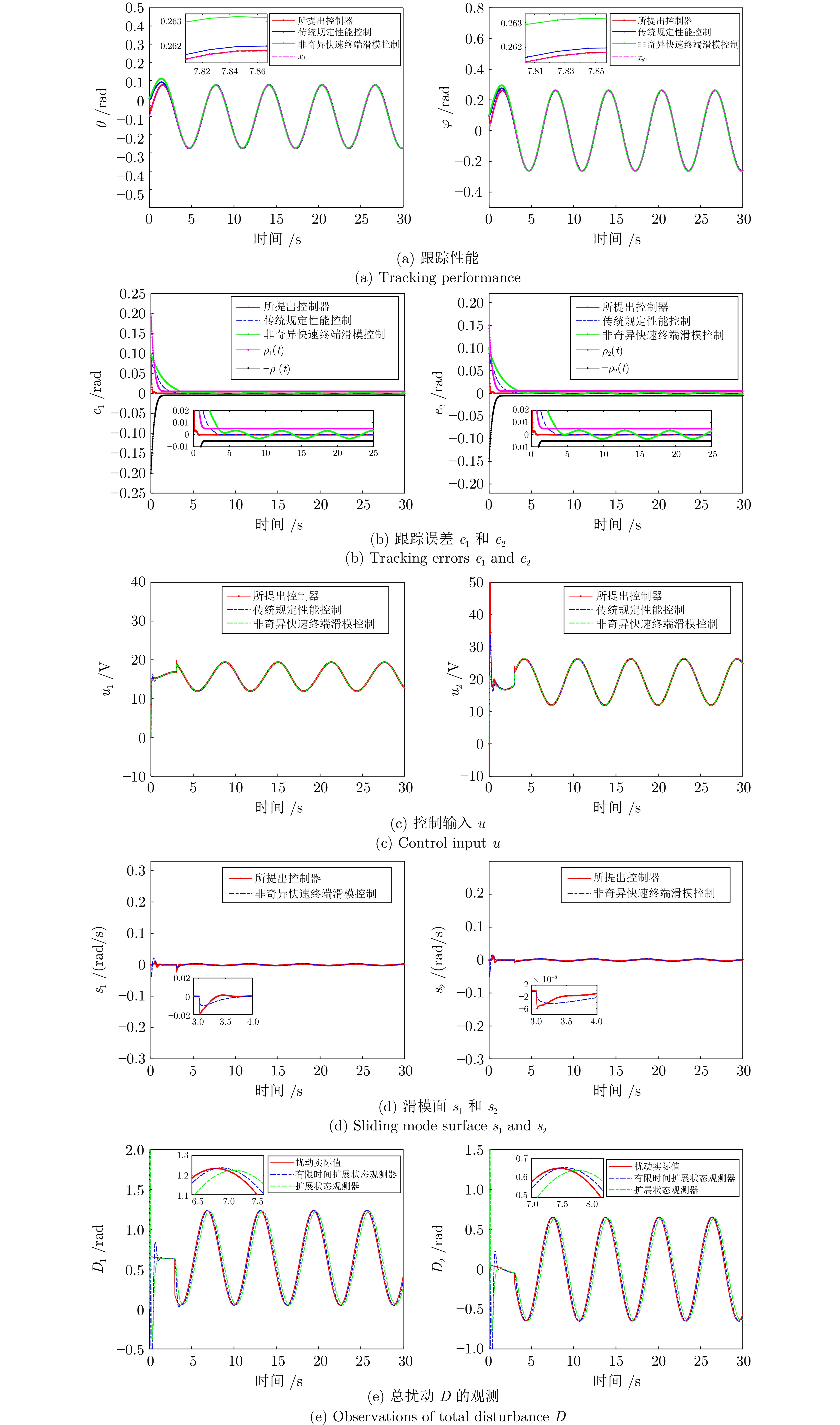
图 4 在情形1下, 所提出控制器与另外两种控制器的控制性能
Fig. 4 Control performance of the proposed controller and the other two controllers in case 1
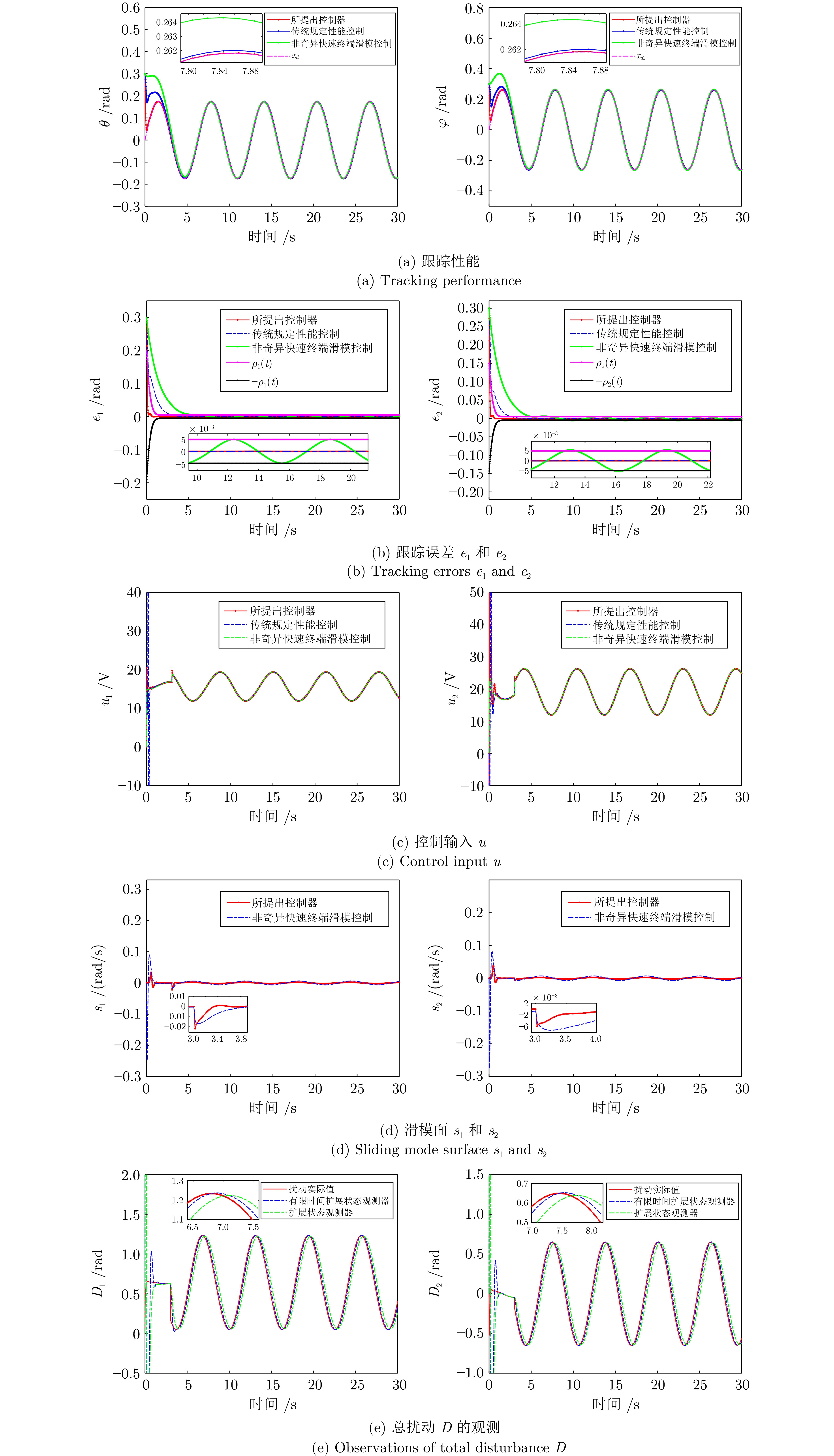
图 5 在情形2下, 所提出控制器与另外两种控制器的控制性能
Fig. 5 Control performance of the proposed controller and the other two controllers in case 2
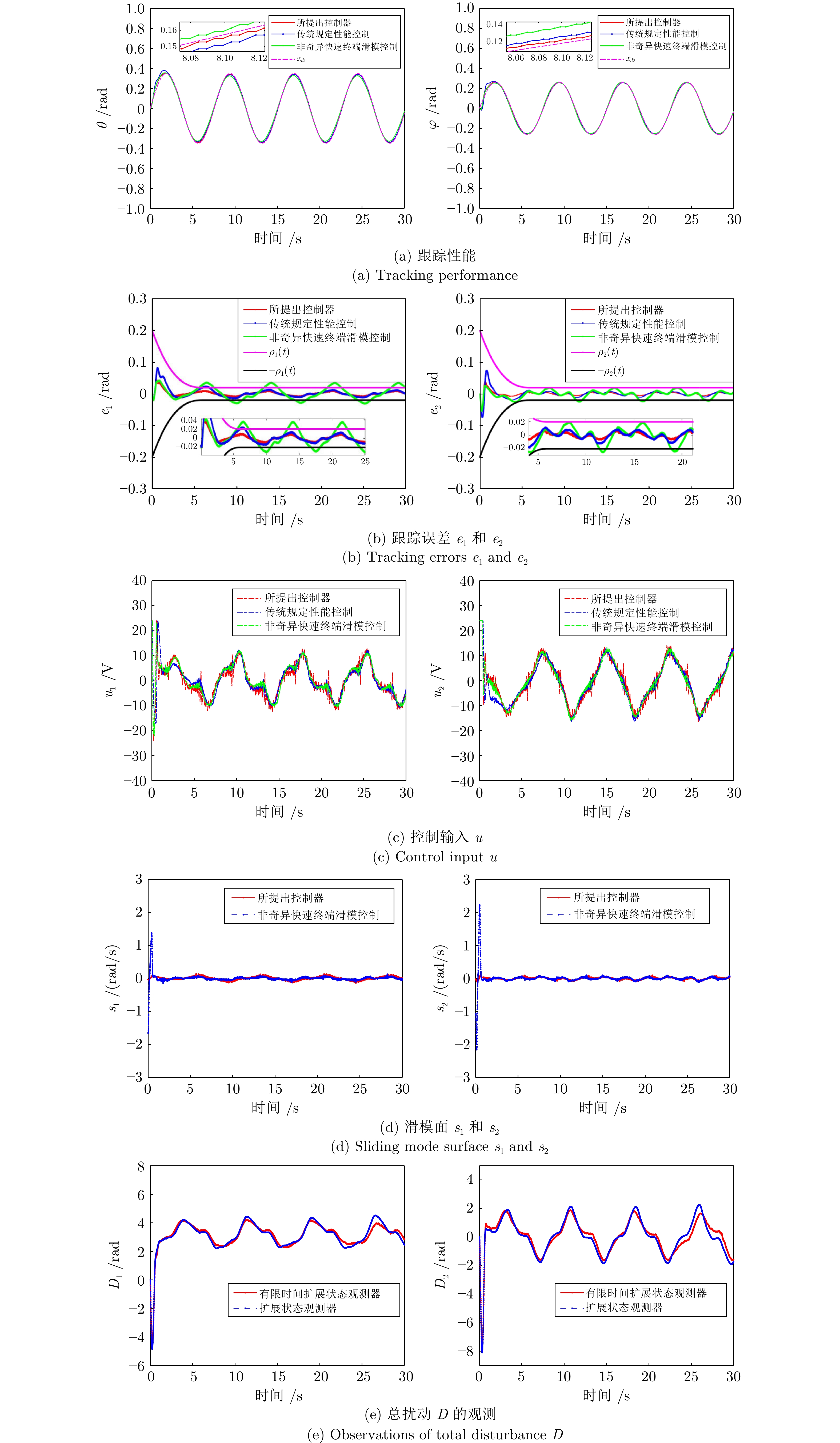
图 7 所提出控制器与另外两种控制器的控制性能
Fig. 7 Control performance of the proposed controller and the other two controllers
表 1 系统参数
Table 1 System parameters
参数 数值 单位 参数 数值 单位 $ J_p $ 0.0232 kg·m2 $ L_m $ 0.0071 m $ J_y $ 0.0238 kg·m2 $ K_{pp} $ 0.0011 N·m/V $ M $ 1.0750 kg $ K_{py} $ 0.0022 N·m/V $ D_p $ 0.0071 N/V $ K_{yp} $ − 0.0027 N·m/V $ D_y $ 0.0220 N/V $ K_{yy} $ 0.0022 N·m/V  下载: 导出CSV
下载: 导出CSV
-
[1] Shen H, Yu X, Yan H C, Park J H, Wang J. Robust fixed-time sliding mode attitude control for a 2-DOF helicopter subject to input saturation and prescribed performance. IEEE Transactions on Transportation Electrification, 2025, 11(1): 1223−1233 doi: 10.1109/TTE.2024.3402316 [2] 吕茂隆, 丁晨博, 韩浩然, 段海滨. 基于深度强化学习的无人机自主感知−规划−控制策略. 自动化学报, 2025, 51(6): 1305−1319Lv Mao-Long, Ding Chen-Bo, Han Hao-Ran, Duan Hai-Bin. Autonomous perception-planning-control strategy based on deep reinforcement learning for unmanned aerial vehicles. Acta Automatica Sinica, 2025, 51(6): 1305−1319 [3] 朱纪洪, 张骁骏, 杨赟杰, 袁夏明. 基于固定时间模型参考方法的倾转旋翼无人机姿态控制. 自动化学报, 2025, 51(5): 972−984 doi: 10.16383/j.aas.c240621Zhu Ji-Hong, Zhang Xiao-Jun, Yang Yun-Jie, Yuan Xia-Ming. Attitude control of tilt-rotor unmanned aerial vehicle based on fixed-time model reference method. Acta Automatica Sinica, 2025, 51(5): 972−984 doi: 10.16383/j.aas.c240621 [4] 陈谋, 刘伟, 张鹏. 性能约束下的四旋翼无人机协同吊挂系统分布式避碰跟踪控制. 自动化学报, 2024, 50(12): 2392−2406 doi: 10.16383/j.aas.c240349Chen Mou, Liu Wei, Zhang Peng. Distributed collision avoidance tracking control for quadrotor cooperative suspension system under performance constraints. Acta Automatica Sinica, 2024, 50(12): 2392−2406 doi: 10.16383/j.aas.c240349 [5] Dutta L, Das D K. Adaptive model predictive control design using multiple model second level adaptation for parameter estimation of two-degree freedom of helicopter model. International Journal of Robust and Nonlinear Control, 2021, 31(8): 3248−3278 doi: 10.1002/rnc.5458 [6] Zhao Z J, Wu J L, Liu Z J, He W, Chen C L P. Adaptive neural network control of a 2-DOF helicopter system considering input constraints and global prescribed performance. Science China Information Sciences, 2024, 67(7): Article No. 172202 doi: 10.1007/s11432-023-3949-3 [7] Çelebi B, Bilgiç B. Optimizing TRMS stability: A multi-objective genetic algorithm approach to PID controller design. Engineering Computations, 2025, 42(2): 710−721 doi: 10.1108/EC-06-2024-0476 [8] Topczewski S, Bibik P. LQR and LQG control of the helicopter during landing on the ship deck. Aircraft Engineering and Aerospace Technology, 2023, 95(9): 1344−1352 doi: 10.1108/AEAT-10-2022-0291 [9] Verginis C K, Bechlioulis C P, Soldatos A G, Tsipianitis D. Robust trajectory tracking control for uncertain 3-DOF helicopters with prescribed performance. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3559−3569 doi: 10.1109/TMECH.2021.3136046 [10] Singh V K, Kamal S. Prescribed-time adaptive backstepping control of an uncertain nonlinear 2-DOF helicopter. IEEE Transactions on Circuits and Systems II: Express Briefs, 2023, 70(11): 4138−4142 doi: 10.1016/j.ifacol.2023.10.488 [11] Li W, Yang P C, Geng K K, Zhu X Y. Fault-tolerant attitude tracking control of tandem rotor helicopter considering internal actuator saturation and external wind gust. International Journal of Adaptive Control and Signal Processing, 2023, 37(7): 1671−1692 doi: 10.1002/acs.3595 [12] Ngo T D, Sultan C. Model predictive control for helicopter shipboard operations in the ship airwakes. Journal of Guidance, Control, and Dynamics, 2016, 39(3): 574−589 doi: 10.2514/1.G001243 [13] Zhao Z J, Zhang J, Liu Z J, Mu C X, Hong K S. Adaptive neural network control of an uncertain 2-DOF helicopter with unknown backlash-like hysteresis and output constraints. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(12): 10018−10027 doi: 10.1109/TNNLS.2022.3163572 [14] Zhao Z J, Zhang J, Liu Z J, He W, Hong K S. Adaptive quantized fault-tolerant control of a 2-DOF helicopter system with actuator fault and unknown dead zone. Automatica, 2023, 148: Article No. 110792 doi: 10.1016/j.automatica.2022.110792 [15] Zhao Z J, Zhang J, Chen S Y, He W, Hong K S. Neural-network-based adaptive finite-time control for a two-degree-of-freedom helicopter system with an event-triggering mechanism. IEEE/CAA Journal of Automatica Sinica, 2023, 10(8): 1754−1765 doi: 10.1109/JAS.2023.123453 [16] Li Y K, Chen M, Shi P, Li T. Stochastic anti-disturbance flight control for helicopter systems with switching disturbances under Markovian parameters. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 2933−2946 doi: 10.1109/TAES.2022.3222280 [17] 谢国超, 段纳, 万昌晖, 臧航. 基于磁链在线辨识的异步电机超螺旋滑模控制. 自动化学报, 2025, 51(5): 1092−1102 doi: 10.16383/j.aas.c240526Xie Guo-Chao, Duan Na, Wan Chang-Hui, Zang Hang. Super-twisting sliding mode control for asynchronous motor based on flux online identification. Acta Automatica Sinica, 2025, 51(5): 1092−1102 doi: 10.16383/j.aas.c240526 [18] Schlanbusch S M, Zhou J, Schlanbusch R. Adaptive attitude control of a rigid body with input and output quantization. IEEE Transactions on Industrial Electronics, 2022, 69(8): 8296−8305 doi: 10.1109/TIE.2021.3105999 [19] Shen S Y, Xu J F. Trajectory tracking active disturbance rejection control of the unmanned helicopter and its parameters tuning. IEEE Access, 2021, 9: 56773−56785 doi: 10.1109/ACCESS.2021.3071457 [20] Zhou B. Multi-variable adaptive high-order sliding mode quasi-optimal control with adjustable convergence rate for unmanned helicopters subject to parametric and external uncertainties. Nonlinear Dynamics, 2022, 108(4): 3671−3692 doi: 10.1007/s11071-022-07433-3 [21] Zou T, Wu H Y, Sun W J, Zhao Z J. Adaptive neural network sliding mode control of a nonlinear two-degrees-of-freedom helicopter system. Asian Journal of Control, 2023, 25(3): 2085−2094 doi: 10.1002/asjc.2862 [22] Zhang H M, Sun Z Y, Xu J, Han R M. Hovering control on a variable-parameters model of a small unmanned helicopter based on a backstepping sliding mode method. Applied Sciences, 2024, 14(22): Article No. 10092 doi: 10.3390/app142210092 [23] Kardehi Moghaddam R, Baratpoor J. Fuzzy adaptive nonsingular terminal sliding mode control of a miniature helicopter. Journal of Aerospace Information Systems, 2024, 21(2): 140−151 doi: 10.2514/1.I011156 [24] Zhao L, Li Z J, Li H B, Liu B. Backstepping integral sliding mode control for pneumatic manipulators via adaptive extended state observers. ISA Transactions, 2024, 144: 374−384 doi: 10.1016/j.isatra.2023.10.014 [25] Li Y M, Zhang J X, Liu W, Tong S C. Observer-based adaptive optimized control for stochastic nonlinear systems with input and state constraints. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(12): 7791−7805 doi: 10.1109/TNNLS.2021.3087796 [26] Sun X D, Lin X W, Guo D, Lei G, Yao M. Improved deadbeat predictive current control with extended state observer for dual three-phase PMSMs. IEEE Transactions on Power Electronics, 2024, 39(6): 6769−6782 doi: 10.1109/TPEL.2024.3370622 [27] Chen H Y, Luo Y P, Liu S S, Cao J D, Zhou Y T. Extended state observer-based bounded consensus for nonlinear multiagent systems via event-triggered impulsive control. International Journal of Robust and Nonlinear Control, 2025, 35(12): 5172−5182 doi: 10.1002/rnc.7971 [28] Konar D, Chatterjee A. Particle swarm optimized fuzzy extended state observer design for disturbance rejection in sliding mode attitude control of a quadrotor. Engineering Applications of Artificial Intelligence, 2025, 157: Article No. 111018 doi: 10.1016/j.engappai.2025.111018 [29] Deng W X, Yao J Y. Extended-state-observer-based adaptive control of electrohydraulic servomechanisms without velocity measurement. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1151−1161 doi: 10.1109/TMECH.2019.2959297 [30] Liu X, Hu P, Chen Y. Adaptive hierarchical sliding mode control based on extended state observer for underactuated robotic system. International Journal of Control, Automation and Systems, 2024, 22(3): 1036−1049 doi: 10.1007/s12555-022-0357-4 [31] Hou Q K, Ding S H. Finite-time extended state observer-based super-twisting sliding mode controller for PMSM drives with inertia identification. IEEE Transactions on Transportation Electrification, 2022, 8(2): 1918−1929 doi: 10.1109/TTE.2021.3123646 [32] Zhang L H, Liu R H, Shi M M, Wang J M, Zhang C Y. Finite-time ESO-based two-stage robust model-free predictive control for flexible interconnecting device. Electrical Engineering, 2025, 107(5): 6099−6106 doi: 10.1007/s00202-024-02863-1 [33] Ji R H, Ge S S, Li D Y. Saturation-tolerant prescribed control for nonlinear systems with unknown control directions and external disturbances. IEEE Transactions on Cybernetics, 2024, 54(2): 877−889 doi: 10.1109/TCYB.2023.3244988 [34] Bu X W, Jiang B X, Lei H M. Low-complexity fuzzy neural control of constrained waverider vehicles via fragility-free prescribed performance approach. IEEE Transactions on Fuzzy Systems, 2023, 31(7): 2127−2139 doi: 10.1109/TFUZZ.2022.3217378 [35] Zhao Z J, Zhang J, Liu Z J, Li H X, Philip Chen C L. Event-triggered adaptive neural fault-tolerant control for a 2-DOF helicopter system with prescribed performance. Automatica, 2024, 162: Article No. 111511 doi: 10.1016/j.automatica.2024.111511 [36] Zou T, Yang H H, Ma G, Li Z F, Liu S Y, Zhao Z J. Adaptive constrained control for two-degree-of-freedom helicopter system with actuator faults. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(5): 6363−6375 doi: 10.1109/TAES.2024.3403076 [37] Wang S S, Dai D C, Peng Z H, Tuo Y. Prescribed-time prescribed performance-based distributed formation control of surface vessels with system uncertainties. Ocean Engineering, 2024, 295: Article No. 116930 doi: 10.1016/j.oceaneng.2024.116930 [38] Polyakov A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Transactions on Automatic Control, 2012, 57(8): 2106−2110 doi: 10.1109/TAC.2011.2179869 [39] Feng Y, Yu X H, Man Z H. Non-singular terminal sliding mode control of rigid manipulators. Automatica, 2002, 38(12): 2159−2167 doi: 10.1016/S0005-1098(02)00147-4 [40] Du H B, Qian C J, Yang S Z, Li S H. Recursive design of finite-time convergent observers for a class of time-varying nonlinear systems. Automatica, 2013, 49(2): 601−609 doi: 10.1016/j.automatica.2012.11.036 [41] Zhao D J, Yang D G. Model-free control of quad-rotor vehicle via finite-time convergent extended state observer. International Journal of Control, Automation and Systems, 2016, 14(1): 242−254 doi: 10.1007/s12555-013-0355-7 [42] Bechlioulis C P, Rovithakis G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Transactions on Automatic Control, 2008, 53(9): 2090−2099 doi: 10.1109/TAC.2008.929402 [43] Wu G X, Ding Y, Tahsin T, Atilla I. Adaptive neural network and extended state observer-based non-singular terminal sliding modetracking control for an underactuated USV with unknown uncertainties. Applied Ocean Research, 2023, 135: Article No. 103560 doi: 10.1016/j.apor.2023.103560 -

 下载:
下载:

计量
- 文章访问数: 431
- HTML全文浏览量: 176
- PDF下载量: 136
- 被引次数: 0
