

Large Models Empowering Embodied Intelligent Manufacturing: Theoretical Foundations, Key Technologies, and Future Prospects
-
摘要: 随着人工智能技术的快速发展, 传统以单点自动化为特征的制造体系, 在应对高度动态化、个性化与系统级协同需求方面日益显现局限. 大模型与具身智能作为新一代人工智能的重要方向, 正在为制造业的智能化转型提供全新路径. 大模型具备跨模态表征、知识泛化和持续学习能力, 具身智能强调智能体与物理环境的动态交互与闭环反馈, 两者融合不仅强化了多模态感知与知识驱动决策的统一性, 还提升了虚实迁移的稳定性与群体智能的协同能力, 从而为复杂工业场景下的自主优化与系统级智能提供系统性支撑. 基于此, 系统梳理相关理论与关键技术, 结合流程制造与离散制造的典型场景, 探讨机理知识融合、多模态感知、符号--神经推理、数字孪生演化和人机共融交互等前沿方向, 为工业人工智能构建结构化框架和系统化方案提供参考, 推动制造业由局部探索迈向系统级深度融合.Abstract: With the rapid advancement of artificial intelligence technology, traditional manufacturing systems-characterized by point-based automation-are increasingly revealing their limitations in addressing highly dynamic, personalized, and system-level collaboration requirements.Large language models and embodied intelligence, as key directions in the next generation of artificial intelligence, are providing a new pathway for the intelligent transformation of the manufacturing industry. Large models possess cross-modal representation, knowledge generalization, and continuous learning capabilities, while embodied intelligence emphasizes dynamic interaction and closed-loop feedback between agents and the physical environment. The integration of these two approaches not only strengthens the unity of multimodal perception and knowledge-driven decision-making but also enhances the stability of virtual-to-physical transfer and the collaborative capabilities of swarm intelligence, thereby providing systematic support for autonomous optimization and system-level intelligence in complex industrial scenarios. Based on this, the paper systematically reviews relevant theories and key technologies. By integrating typical scenarios from process manufacturing and discrete manufacturing, it explores cutting-edge directions such as the fusion of mechanistic knowledge, multimodal perception, symbolic-neural reasoning, digital twin evolution, and human-machine collaborative interaction. This provides a reference for constructing a structured framework and systematic solutions for industrial artificial intelligence, driving the manufacturing sector from localized exploration toward system-level deep integration.
-
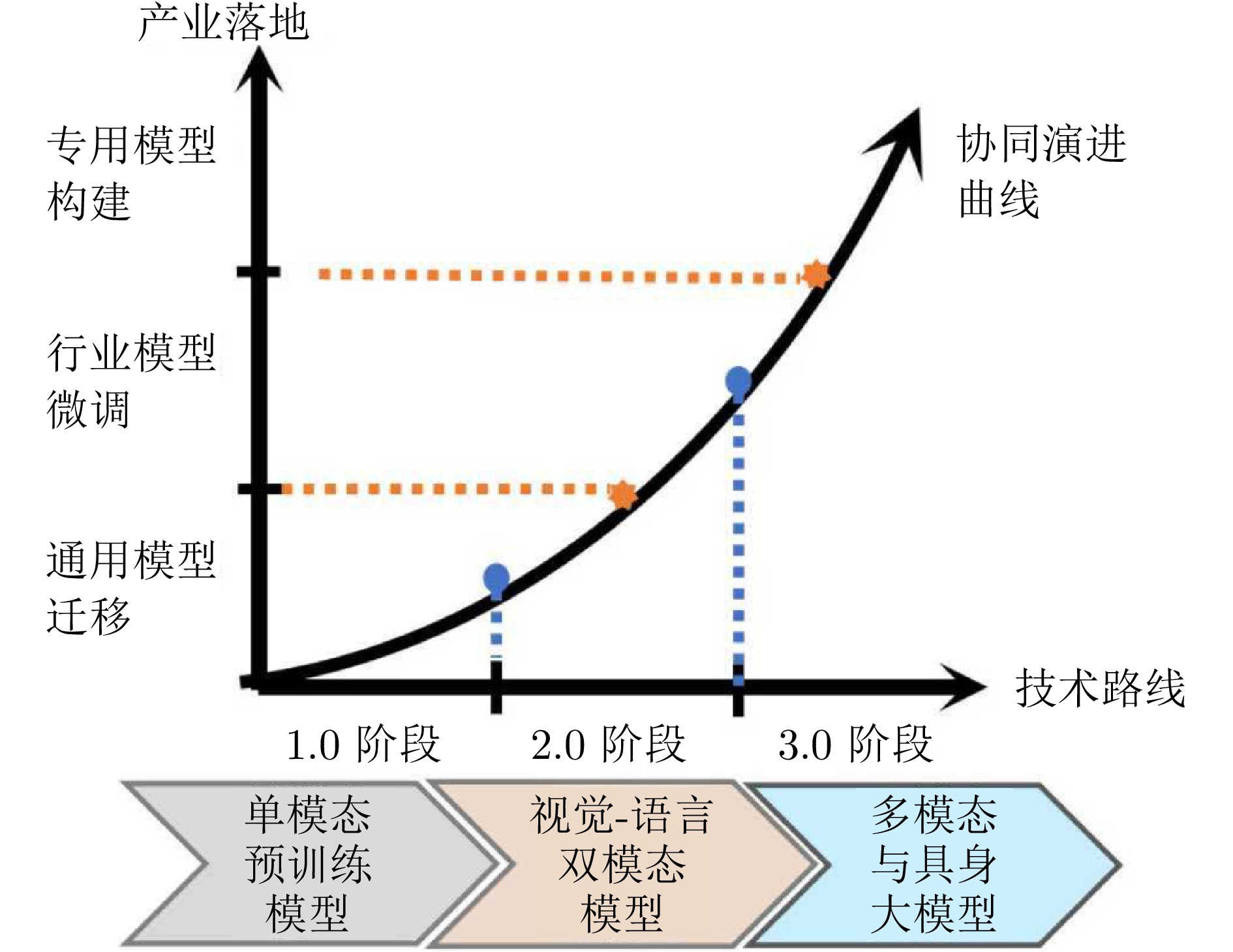
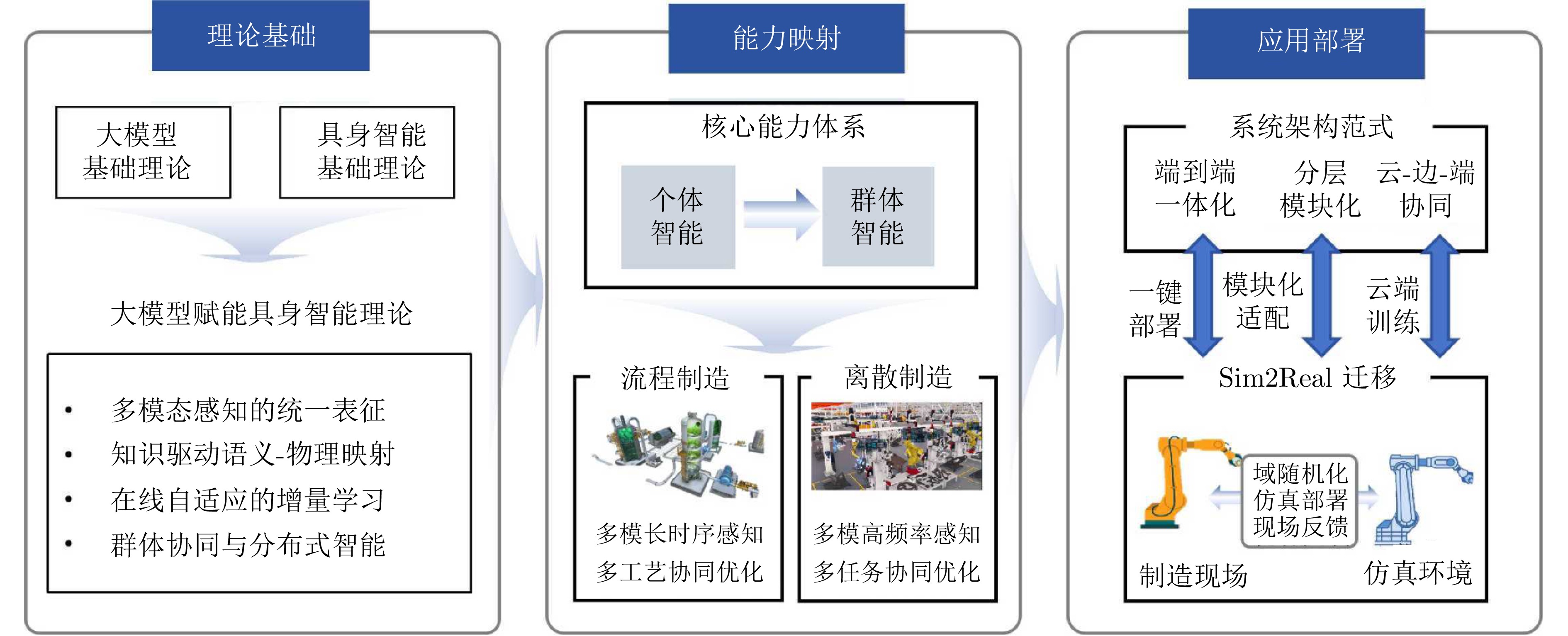
图 3 大模型技术路线与产业落地的协同演进示意图
Fig. 3 Schematic diagram of the co-evolution between large model technology roadmaps and industrial adoption
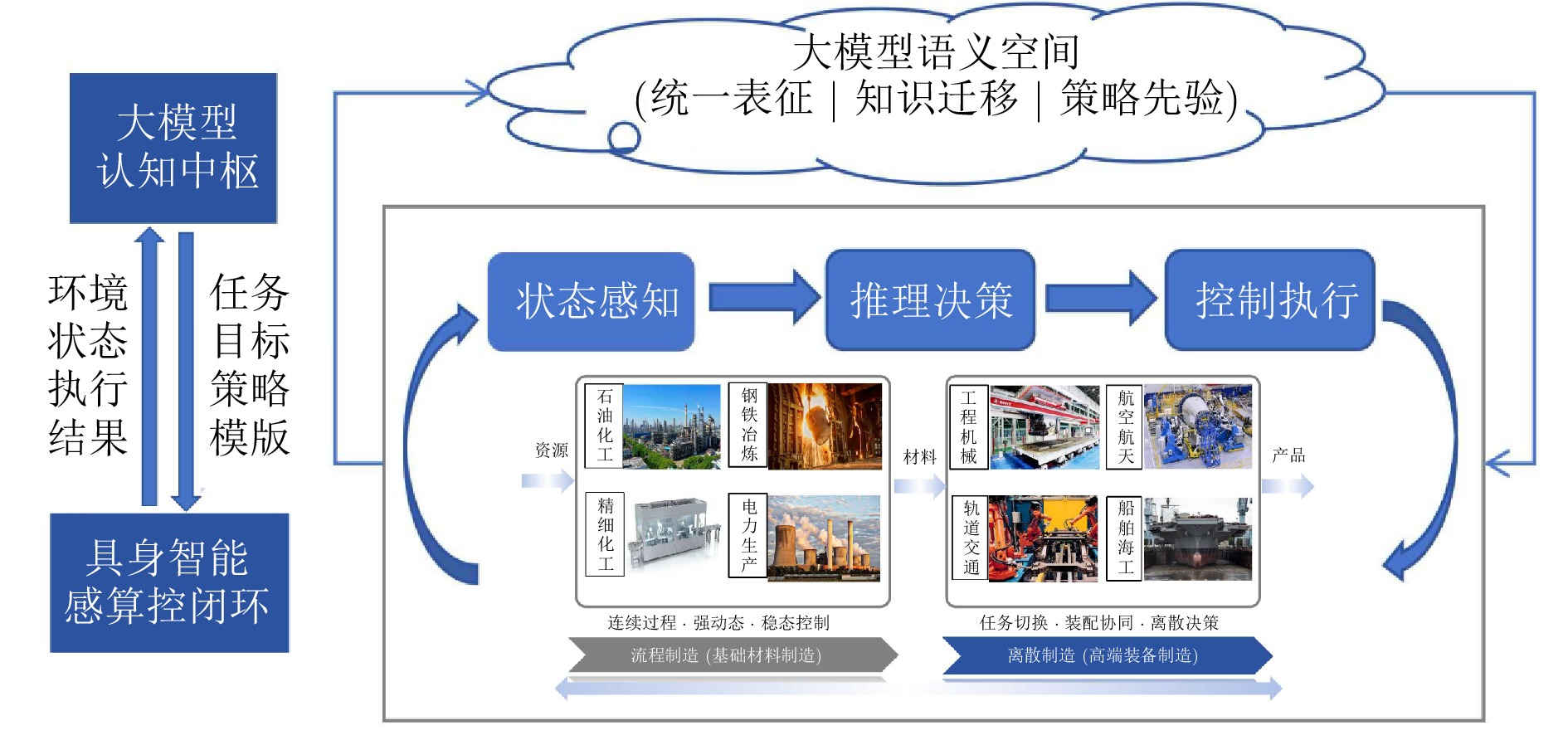
图 4 大模型与具身智能系统的交互示意图
Fig. 4 Schematic diagram of interactions between large model and embodied intelligence system
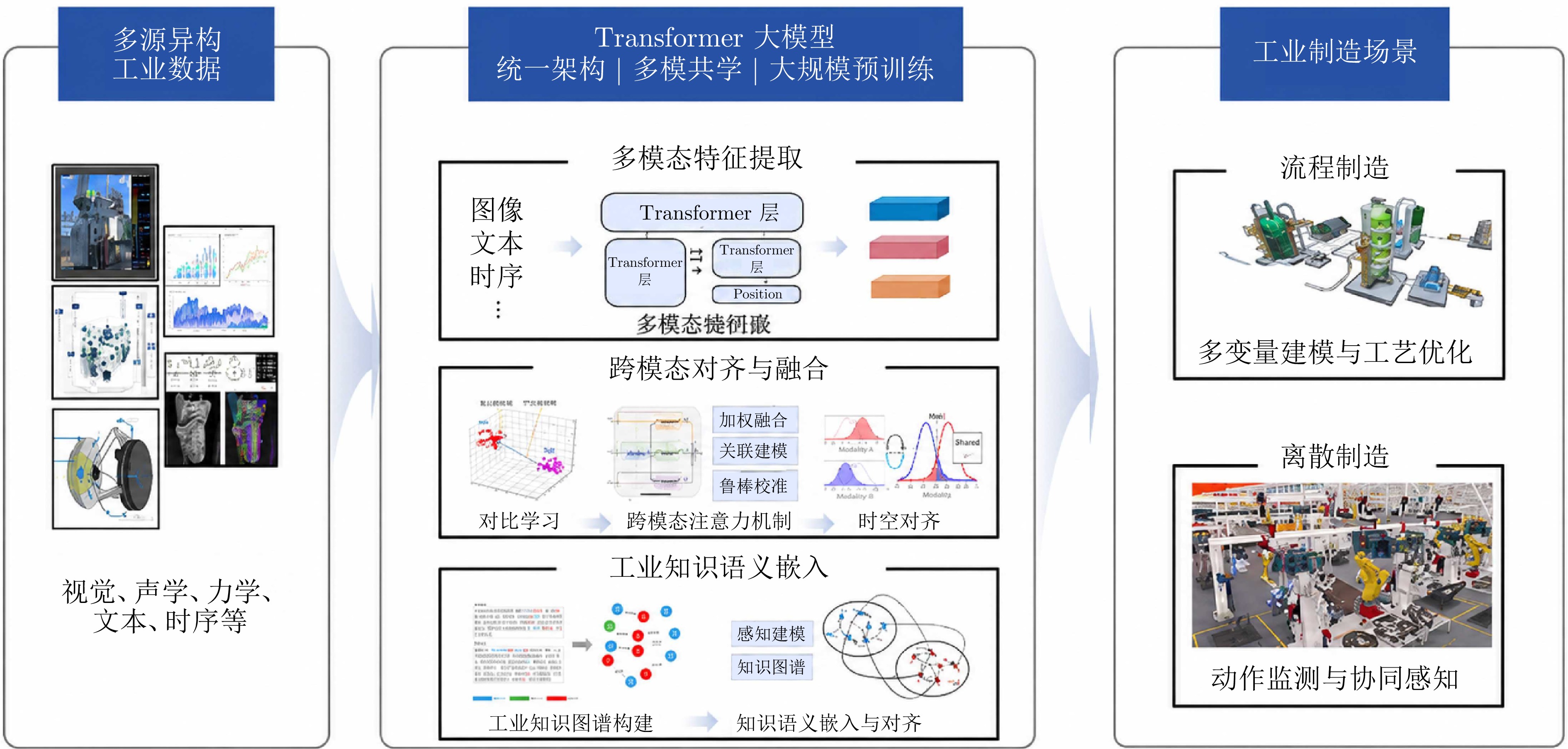
图 5 大模型赋能多模态融合感知及应用框架
Fig. 5 Framework of large models for multimodal perception and applications
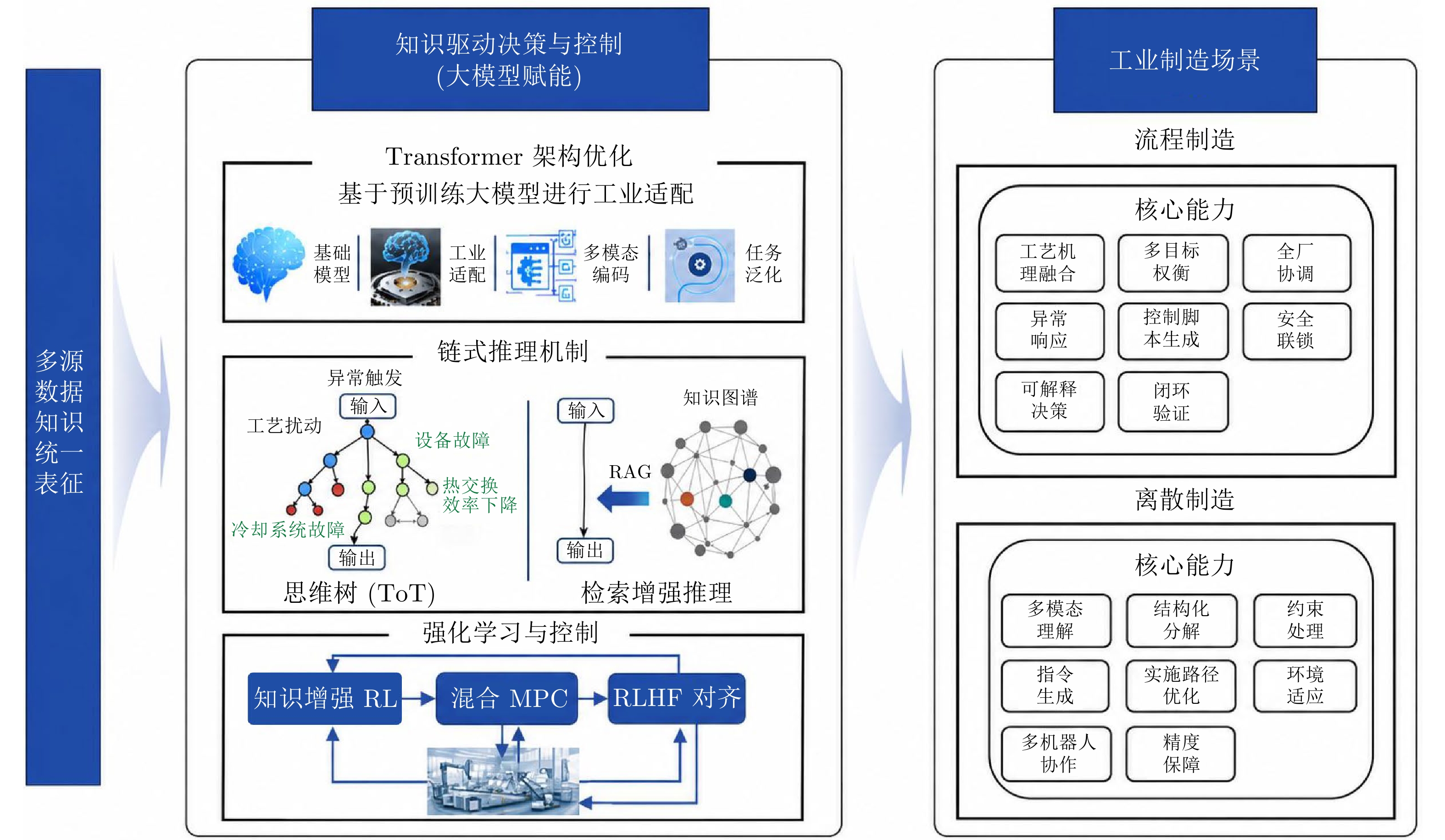
图 6 大模型赋能知识驱动决策与控制框架
Fig. 6 Framework of Large Models for Knowledge-driven Decision and Control
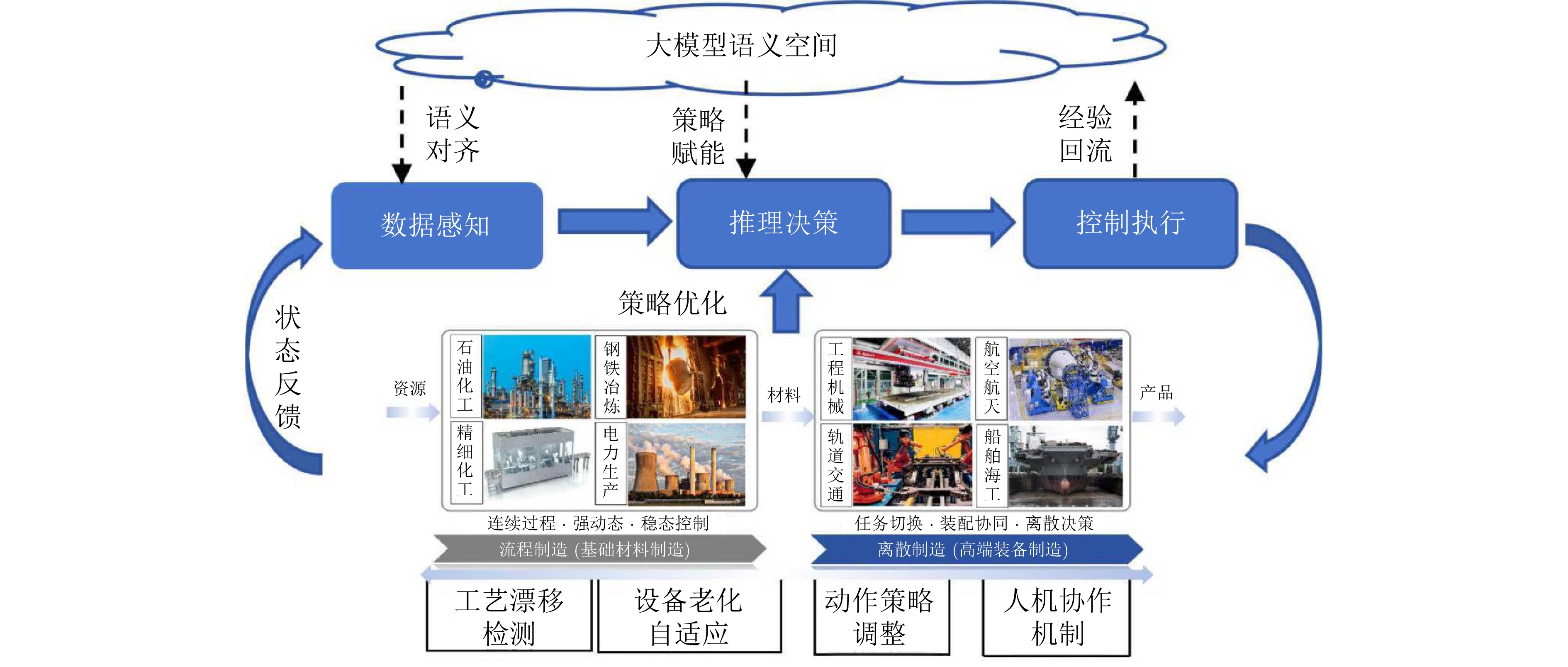
图 7 大模型赋能在线自适应持续学习框架
Fig. 7 Framework of large models for online adaptive continuous learning
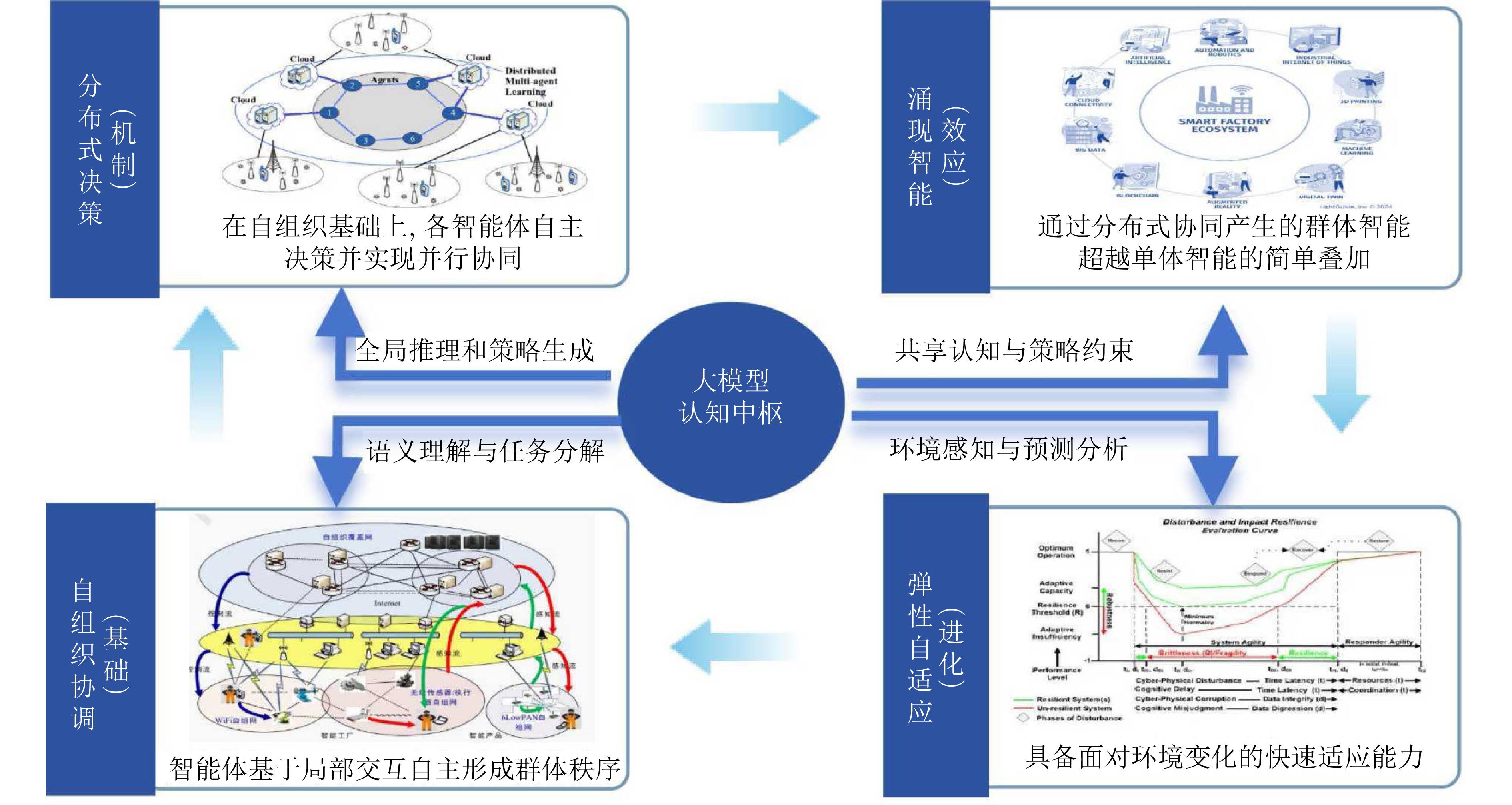
图 8 大模型赋能群体协同与分布式智能框架
Fig. 8 Framework of large models for swarm collaboration and distributed intelligence
-
[1] Platform Industrie 4.0. Shaping the Digital Transformation in Manufacturing: Network Report, Technical Report, Federal Ministry for Economic Affairs and Climate Action, Germany, 2025 [2] Rudnitsky R G, Ray C, Jahanmir S. Strategic Plan for the Manufacturing USA Program, NIST Advanced Manufacturing Series 600-15, National Institute of Standards and Technology, USA, 2024 [3] 中华人民共和国工业和信息化部. 《"5G+工业互联网"512工程推进方案》, 工信厅信管(2019)78号, 2019.Ministry of Industry and Information Technology of the People's Republic of China. Implementation plan of the 5G+ industrial internet "512" project, Technical Report Gong Xin Ting Xin Guan[2019] No. 78, Ministry of Industry and Information Technology, China, 2019 [4] World Economic Forum. Global Lighthouse Network: The Mindset Shifts Driving Impact and Scale, Technical Report, World Economic Forum, Switzerland, 2025 [5] World Economic Forum. Global Lighthouse Network 2025: World Economic Forum Recognizes Companies Transforming Manufacturing through Innovation, Technical Report, World Economic Forum, Switzerland, 2025 [6] 中国智能制造产业发展报告编写组. 中国智能制造产业发展报告(2023–2024), 北京: 北京信息产业协会, 2024.China Intelligent Manufacturing Industry Development Report Editorial Board. China Intelligent Manufacturing Industry Development Report (2023–2024), Beijing: Beijing Information Industry Association, 2024. [7] Rockwell Automation. The 9th Annual State of Smart Manufacturing Report, Technical Report, Rockwell Automation, USA, 2024 [8] Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez A N. Attention is all you need. Advances in Neural Information Processing Systems, 2017, 30: 5998−6008 [9] Touvron H, Martin L, Stone K, Albert P, Almahairi A, Babaei Y. LLaMA-2: a state-of-the-art open-source large language model. arXiv preprint arXiv: 2307.09288, 2023 [10] Lu, H, Liu, W, Zhang, B. DeepSeek-VL: Towards Real-World Vision-Language Understanding. arXiv preprint arXiv: 2403.05525, 2024 [11] Sun F, Chen R, Ji T, Luo Y, Zhou H, Liu H. A Comprehensive Survey on Embodied Intelligence: Advancements, Challenges, and Future Perspectives. CAAI Artificial Intelligence Research, 2024, 3: 9150042 doi: 10.26599/air.2024.9150042 [12] Deitke M, Batra D, Bisk Y, Campari T, Chang A X, Chaplot D S. Retrospectives on the embodied AI workshop. arXiv preprint arXiv: 2210.06849, 2022 [13] Ai L, Ziehl P. Advances in digital twin technology in industry: A review of applications, challenges, and standardization. Journal of Intelligent Construction, 2025, 3(2): 1−19 doi: 10.26599/jic.2025.9180083 [14] Lawton G. Discrete vs. process manufacturing: choosing ERP[Online], available: https://www.techtarget.com/searcherp/feature/Discrete-vs-process-manufacturing-Choosing-ERP, June 4, 2026 [15] Zhong R Y, Xu X, Klotz E, Newman S T. Intelligent manufacturing in the context of Industry 4.0: a review. Engineering, 2017, 3(5): 616−630 doi: 10.1016/J.ENG.2017.05.015 [16] Liao Y, Deschamps F, Loures E d F R, Ramos L F P. Past, present and future of Industry 4.0-a systematic literature review and research agenda proposal. International Journal of Production Research, 2017, 55(12): 3609−3629 doi: 10.1080/00207543.2017.1308576 [17] 王文晟, 谭宁, 黄凯, 张雨浓, 郑伟诗, 孙富春. 基于大模型的具身智能系统综述. 自动化学报, 2025, 51(1): 1−19 doi: 10.16383/j.aas.c240542Wang W, Tan N, Huang K, Zhang Y, Zheng W, Sun F. A survey of large-model-based embodied intelligence systems. Acta Automatica Sinica, 2025, 51(1): 1−19 doi: 10.16383/j.aas.c240542 [18] 曾凯, 王耀南, 谭浩然, 方遒, 汪渊, 袁礼伟. AI大模型驱动的具身智能人形机器人技术与展望. 中国科学(信息科学), 2025, 58(5): 967−992 doi: 10.1360/SSI-2024-0350Zeng K, Wang Y, Tan H, Fang Q, Wang Y, Yuan L. Large-model-driven embodied humanoid robotics: technologies and prospects. Science China Information Sciences, 2025, 58(5): 967−992 doi: 10.1360/SSI-2024-0350 [19] 任磊, 王浩然, 董俊, 贾志强, 李硕, 王宇. 工业基础模型. IEEE Transactions on Cybernetics, 2025, 55(5): 2286−2301Ren L, Wang H, Dong J, Jia Z, Li S, Wang Y. Industrial foundation model. IEEE Transactions on Cybernetics, 2025, 55(5): 2286−2301 [20] Xu J, Sun Q, Han Q L, Tang Y. When embodied AI meets Industry 5.0: human-centered smart manufacturing. IEEE/CAA Journal of Automatica Sinica, 2025, 12(3): 485−501 doi: 10.1109/JAS.2025.125327 [21] Kaplan J, McCandlish S, Henighan T, Brown T B, Chess B, Child R. Scaling laws for neural language models. arXiv preprint arXiv: 2001.08361, 2020 [22] Devlin J, Chang M W, Lee K, Toutanova K. Bert: pre-training of deep bidirectional transformers for language understanding. In: Proceedings of NAACL-HLT, USA: Association for Computational Linguistics, 2019, 1: 4171–4186 [23] Chen T, Kornblith S, Norouzi M, Hinton G. A simple framework for contrastive learning of visual representations. In: Proceedings of the International Conference on Machine Learning, Virtual Event, USA: PMLR, 2020, 119: 1597–1607 [24] Brown T, Mann B, Ryder N, Subbiah M, Kaplan J, Dhariwal P. Language models are few-shot learners. In: Proceedings of the 34th Conference on Neural Information Processing Systems. Canada: Curran Associates, 2020. 1877–1901 [25] Liu P, Yuan W, Fu J, Jiang Z, Hayashi H, Neubig G. Pre-train, prompt, and predict: a systematic survey of prompting methods in natural language processing. ACM Computing Surveys, 2023, 55(9): 1−35 [26] Kirkpatrick J, Pascanu R, Rabinowitz N, Veness J, Desjardins G, Rusu A. Overcoming catastrophic forgetting in neural networks. Proceedings of the National Academy of Sciences, 2017, 114(13): 3521−3526 doi: 10.1073/pnas.1611835114 [27] Lopez-Paz D, Ranzato M. Gradient episodic memory for continual learning. In: Proceedings of the 31st Annual Conference on Neural Information Processing Systems, USA: Neural Information Processing Systems Foundation, 2017, 30: 6467–6476. [28] Shin H, Lee J K, Kim J, Kim J. Continual learning with deep generative replay. In: Proceedings of the 31st Annual Conference on Neural Information Processing Systems, USA: Neural Information Processing Systems Foundation, 2017, 30: 2990–2999 [29] van de Ven G, Siegelmann H, Tolias A. Brain-inspired replay for continual learning with artificial neural networks. Nature Communications, 2020, 11(1): 4069 doi: 10.1038/s41467-020-17866-2 [30] Radford A, Wu J, Child R, Luan D, Amodei D, Sutskever I. Language models are unsupervised multitask learners. Technical Report, OpenAI, USA, 2019. [31] Touvron H, Cord M, Douze M, Massa F, Sablayrolles A, Jégou H. Training data-efficient image transformers & distillation through attention. In: Proceedings of the International Conference on Machine Learning, Virtual Event, USA: PMLR, 2021, 139: 10347–10357 [32] Marin D, Chang J H R, Ranjan A, Prabhu A, Rastegari M, Tuzel O. Token pooling in vision transformers for image classification. In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision. USA: IEEE, 2023. 12–21 [33] Radford A, Kim J, Hallacy C, Ramesh A, Goh G, Agarwal S. Learning transferable visual models from natural language supervision. arXiv preprint arXiv: 2103.00020, 2021 [34] Li J, Li D, Xiong C, Hoi S. Blip: bootstrapping language-image pre-training for unified vision-language understanding and generation. In: Proceedings of the 39th International Conference on Machine Learning. USA: PMLR, 2022. 12888–12900 [35] Kim W, Son B, Kim I. Vilt: vision-and-language transformer without convolution or region supervision. In: Proceedings of the 38th International Conference on Machine Learning. USA: PMLR, 2021. 5583–5594 [36] Driess D, Xia F, Sajjadi M, Lynch C, Chowdhery A, Ichter B. PaLM-E: an embodied multimodal language model. arXiv preprint arXiv: 2303.03378, 2023 [37] Brohan A, Brown N, Carbajal J, Chebotar Y, Chen X. RT-2: vision-language-action models transfer web knowledge to robotic control. arXiv preprint arXiv: 2307.15818, 2023 [38] Kim M, Pertsch K, Karamcheti S, Xiao T, Balakrishna A, Nair S. OpenVLA: an open-source vision-language-action model. arXiv preprint arXiv: 2406.09246, 2024 [39] Yang Z, Li L, Lin K, Wang J, Lin C-C, Liu Z. The dawn of LMMs: preliminary explorations with GPT-4V(ision). arXiv preprint arXiv: 2309.17421, 2023. [40] Team K, Du A, Yin B, Xing B, Qu B, Wang B. Kimi-VL technical report. arXiv preprint arXiv: 2504.07491, 2025. [41] Wu Z, Chen X, Pan Z, Liu X, Liu W, Dai D. DeepSeek-VL2: mixture-of-experts vision-language models for advanced multimodal understanding. arXiv preprint arXiv: 2412.10302, 2024. [42] Bai J, Bai S, Yang S, Wang S, Tan S, Wang P. Qwen-VL: a large vision-language model for Chinese general image understanding and reasoning. arXiv preprint arXiv: 2308.12966, 2023 [43] Pfeifer R, Bongard J. How the Body Shapes the Way We Think: A New View of Intelligence. USA: MIT Press, 2006. [44] Wilson M. Six views of embodied cognition. Psychonomic Bulletin & Review, 2002, 9(4): 625−636 doi: 10.3758/BF03196322 [45] Baltrušaitis T, Ahuja C, Morency L P. Multimodal machine learning: a survey and taxonomy. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 41(2): 423−443 doi: 10.1109/TPAMI.2018.2798607 [46] Brooks R A. Intelligence without representation. Artificial Intelligence, 1991, 47(1-3): 139−159 doi: 10.1016/0004-3702(91)90053-M [47] Sutton R S, Barto A G. Reinforcement Learning: An Introduction. USA: MIT Press, 2018. [48] Levine S, Finn C, Darrell T, Abbeel P. End-to-end training of deep visuomotor policies. The Journal of Machine Learning Research, 2016, 17(39): 1−40 [49] Camacho E F, Alba C B. Model Predictive Control. UK: Springer Science & Business Media, 2013. [50] Ouyang L, Wu J, Jiang X, Almeida D, Wainwright C, Mishkin P. Training language models to follow instructions with human feedback. arXiv preprint arXiv: 2203.02155, 2022. [51] Bonabeau E, Dorigo M, Theraulaz G. Swarm Intelligence: From Natural to Artificial Systems. Oxford: Oxford University Press, 1999. [52] Dorigo M, Birattari M. Swarm intelligence. Scholarpedia, 2007, 2(9): 1462 [53] Cavalcante R C, Bittencourt I I, da Silva A P, Silva M, Costa E, Santos R. A survey of security in multi-agent systems Expert Systems with Applications, 2012, 39(5): 4835-4846 [54] Brambilla M, Ferrante E, Birattari M, Dorigo M. Swarm robotics: a review from the swarm engineering perspective. Swarm Intelligence, 2013, 7(1): 1−41 doi: 10.1007/s11721-012-0075-2 [55] Yang Q, Liu Y, Chen T, Tong Y. Federated machine learning: concept and applications. ACM Transactions on Intelligent Systems and Technology, 2019, 10(2): 1−19 [56] Zhang K, Yang Z, Liu H, Zhang T, Başar T. Fully decentralized multi-agent reinforcement learning with networked agents. In: Proceedings of the International Conference on Machine Learning. USA: PMLR, 2021. 12385–12397 [57] Wu Z, Pan S, Chen F, Long G, Zhang C, Yu P S. A comprehensive survey on graph neural networks. IEEE Transactions on Neural Networks and Learning Systems, 2020, 32(1): 4−24 [58] Holling C S. Resilience and stability of ecological systems. Annual Review of Ecology and Systematics, 1973, 4: 1−23 doi: 10.2307/jj.41003648.6 [59] Bruneau M, Chang S E, Eguchi R T, Lee G C, O'Rourke T D, Reinhorn A M. A framework to quantitatively assess and enhance the seismic resilience of communities. Earthquake Spectra, 2003, 19(4): 733−752 doi: 10.1193/1.1623497 [60] Sutton R S, Barto A G. Reinforcement learning: an introduction. USA : MIT Press, 2018. [61] Ghallab M, Nau D, Traverso P. Automated planning: theory and practice. Netherlands: Elsevier, 2004. [62] Hafner D, Lillicrap T, Norouzi M, Ba J. Mastering diverse domains through world models. arXiv preprint arXiv: 2301.04104, 2023 [63] Garcez A, Lamb L. Neurosymbolic AI: the 3rd wave. Artificial Intelligence Review, 2023, 56(11): 12387−12406 doi: 10.1007/s10462-023-10448-w [64] Lee J, Wu F, Zhao W, Ghaffari M, Liao L, Siegel D. Prognostics and health management design for rotary machinery systems—reviews, methodology and applications. Mechanical Systems and Signal Processing, 2014, 42(1-2): 314−334 doi: 10.1016/j.ymssp.2013.06.004 [65] LeCun Y. A path towards autonomous machine intelligence. OpenReview preprint, 2022 [66] Hu E J, Shen Y, Wallis P, Allen-Zhu Z, Li Y, Wang S, et al. LoRA: low-rank adaptation of large language models. arXiv preprint arXiv: 2106.09685, 2022. [67] Finn C, Abbeel P, Levine S. Model-agnostic meta-learning for fast adaptation of deep networks. In: Proceedings of the International Conference on Machine Learning, Sweden: PMLR, 2017: 1126–1135 [68] Hussein A, Gaber M M, Elyan E, Jayne C. Imitation learning: a survey of learning methods. ACM Computing Surveys, 2017, 50(2): 1−35 [69] Duan Y, Andrychowicz M, Stadie B, Ho J, Schneider J, Sutskever I. One-shot imitation learning. In: Proceedings of the 30th Annual Conference on Neural Information Processing Systems. USA: Curran Associates, 2017. 1087–1098 [70] Parisi G I, Kemker R, Part J L, Kanan C, Wermter S. Continual lifelong learning with neural networks: a review. Neural Networks, 2019, 113: 54−71 doi: 10.1016/j.neunet.2019.01.012 [71] Boyd S, Parikh N, Chu E, Peleato B, Eckstein J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Foundations and Trends in Machine Learning, 2011, 3(1): 1−122 doi: 10.1561/2200000016 [72] McMahan B, Moore E, Ramage S, Hampson S, Arcas B A. Communication-efficient learning of deep networks from decentralized data. In: Proceedings of the 20th International Conference on Artificial Intelligence and Statistics. USA: PMLR, 2017. 1273–1282 [73] Wooldridge M. An Introduction to Multi-Agent Systems. UK: John Wiley & Sons, 2009. [74] Brambilla M, Ferrante E, Birattari M, Dorigo M. Swarm robotics: a review from the swarm engineering perspective. Swarm Intelligence, 2013, 7(1): 1−41 doi: 10.1007/s11721-012-0075-2 [75] Kennedy J, Eberhart R. Particle swarm optimization. In: Proceedings of the International Conference on Neural Networks. Australia: IEEE, 1995. 1942–1948 [76] Dorigo M. Ant colony optimization. Scholarpedia, 2007, 2(3): 1461 doi: 10.7551/mitpress/1290.003.0006 [77] Mo F, Chaplin J C, Sanderson D, Martinez-Arellano G, Ratchev S. Semantic models and knowledge graphs as manufacturing system reconfiguration enablers. Robotics and Computer-Integrated Manufacturing, 2024, 86: 102625 doi: 10.1016/j.rcim.2023.102625 [78] Du K, Yang B, Xie K, Dong N, Zhang Z, Wang S, Mo F. LLM-MANUF: an integrated framework of fine-tuning large language models for intelligent decision-making in manufacturing. Advanced Engineering Informatics, 2025, 65: 103263 doi: 10.1016/j.aei.2025.103263 [79] Ferreira B, Reis J. Artificial intelligence in supply chain management: a systematic literature review and guidelines for future research. In: Proceedings of the International Joint Conference on Industrial Engineering and Operations Management. Switzerland: Springer, 2023. 339–354 [80] Garcia C I, DiBattista M A, Letelier T A, Halloran H D, Camelio J A. Framework for LLM applications in manufacturing. Manufacturing Letters, 2024, 41: 253−263 doi: 10.1016/j.mfglet.2024.09.030 [81] Ni M, Wang T, Leng J, Chen C, Cheng L. A large language model-based manufacturing process planning approach under Industry 5.0. International Journal of Production Research, 20251−20 [82] Kobilov A, Lan J. Automatic robot task planning by integrating large language model with genetic programming. arXiv preprint arXiv: 2502.07772, 2025 [83] Liu Y, Palmieri L, Koch S, Georgievski I, Aiello M. DELTA: decomposed efficient long-term robot task planning using large language models. arXiv preprint arXiv: 2404.03275, 2024 [84] Kannan S S, Venkatesh V L, Min B C. Smart-LLM: smart multi-agent robot task planning using large language models. In: Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems. United Arab Emirates: IEEE, 2024. 12140–12147 [85] Wang J, Shi E, Hu H, Ma C, Liu Y, Wang X. Large language models for robotics: opportunities, challenges, and perspectives. Journal of Automation and Intelligence, 2025, 4(1): 52−64 doi: 10.1016/j.jai.2024.12.003 [86] Li Y, Zhao H, Jiang H, Pan Y, Liu Z, Wu Z. Large language models for manufacturing. arXiv preprint arXiv: 2410.21418, 2024 [87] Raza M, Jahangir Z, Riaz M B, Saeed M J, Sattar M A. Industrial applications of large language models. Scientific Reports, 2025, 15(1): 13755 doi: 10.1038/s41598-025-98483-1 [88] Wu T, Li J, Bao J, Liu Q. Large language model-driven multi-agent systems for improving production efficiency and reducing carbon emissions in manufacturing. Computers & Industrial Engineering, 2025, 207: 111299 doi: 10.1016/j.cie.2025.111299 [89] Xue D, Zhou X, Wang M, Liu F. Formation control and path planning of multi-robot systems via large language models. Science China Information Sciences, 2025, 68(5): 150205 doi: 10.1007/s11432-024-4290-4 [90] Huang J, Teng Y, Liu Q, Gao L, Li X, Zhang C, et al. Leveraging large language models for efficient scheduling in human-robot collaborative flexible manufacturing systems. npj Advanced Manufacturing, 2025, 2: 47 doi: 10.1038/s44334-025-00061-w [91] 中国石化新闻网. 数智升级: 驱动炼化企业高端化、智能化、绿色化发展[Online], available: https://www.sinopecnews.com.cn/xnews/content/2025-01/08/content_7115955.html, 2025-01.China Petrochemical News. Digital intelligence upgrade: driving refining and chemical enterprises toward high-end, intelligent, and green development[Online], available: https://www.sinopecnews.com.cn/xnews/content/2025-01/08/content_7115955.html, Jan 2025 [92] 中控科技. AI赋能国内首个石化大模型在甬落地[Online], available: https://jxj.ningbo.gov.cn/art/2024/11/15/art_1229561617_58940951.html, 2024-11-15.SUPCON Technology. AI empowers the first petrochemical foundation model deployment in Ningbo[Online], available: https://jxj.ningbo.gov.cn/art/2024/11/15/art_1229561617_58940951.html, Nov 15, 2024. [93] 赵家贝, 黄雅菁. 数字孪生技术: 驱动数字化转型的关键应用与发展. 科技创新与应用, 2024, 14(3): 25−28 doi: 10.19981/j.CN23-1581/G3.2024.03.007Zhao J, Huang Y. Digital twin technology: key applications and development driving digital transformation. Technology Innovation and Application, 2024, 14(3): 25−28 doi: 10.19981/j.CN23-1581/G3.2024.03.007 [94] 中国电信. 中国电信"星辰"工业大模型在钢铁、石化等行业率先落地[Online], available: https://www.chinatelecom.com.cn/ct/news/rgzn/, 2024-10-29.China Telecom. China Telecom "Xingchen" industrial foundation model deployed in steel, petrochemical and other industries[Online], available: https://www.chinatelecom.com.cn/ct/news/rgzn/, Oct. 29, 2024 [95] 袁礼伟, 王耀南, 谭浩然, 方遒, 李哲. 面向智能制造的自主可控工业互联网发展研究. 中国工程科学, 2025, 27(3): 38−53 doi: 10.15302/J-SSCAE-2024.12.027Yuan L, Wang Y, Tan H, Fan Q, Li Z. Research on autonomous and controllable industrial internet development for intelligent manufacturing. Engineering Science, 2025, 27(3): 38−53 doi: 10.15302/J-SSCAE-2024.12.027 [96] Van der Heijden B, Luijkx J, Ferranti L, Kober J, Babuska R. EAGERx: composable and reproducible real-time reinforcement learning. IEEE Robotics and Automation Letters, 2023, 8(6): 3579−3586 [97] Makoviychuk V, Makoviichuk D, Zhong Y, Anandkumar A, Garg A. REX: data-driven residual error compensation for robotic sim-to-real transfer. arXiv preprint arXiv: 2309.05653, 2023. [98] Uslaender T, Baumann M, Boschert S, Rosen R, Sauer O, Stojanovic L. Symbiotic evolution of digital twin systems and dataspaces. Automation, 2022, 3(3): 378−399 doi: 10.3390/automation3030020 -

 下载:
下载:

计量
- 文章访问数: 95
- HTML全文浏览量: 57
- 被引次数: 0
