

Adaptive Iterative Learning Economic Model Predictive Control for Batch Processes With Non-repetitive Disturbances
-
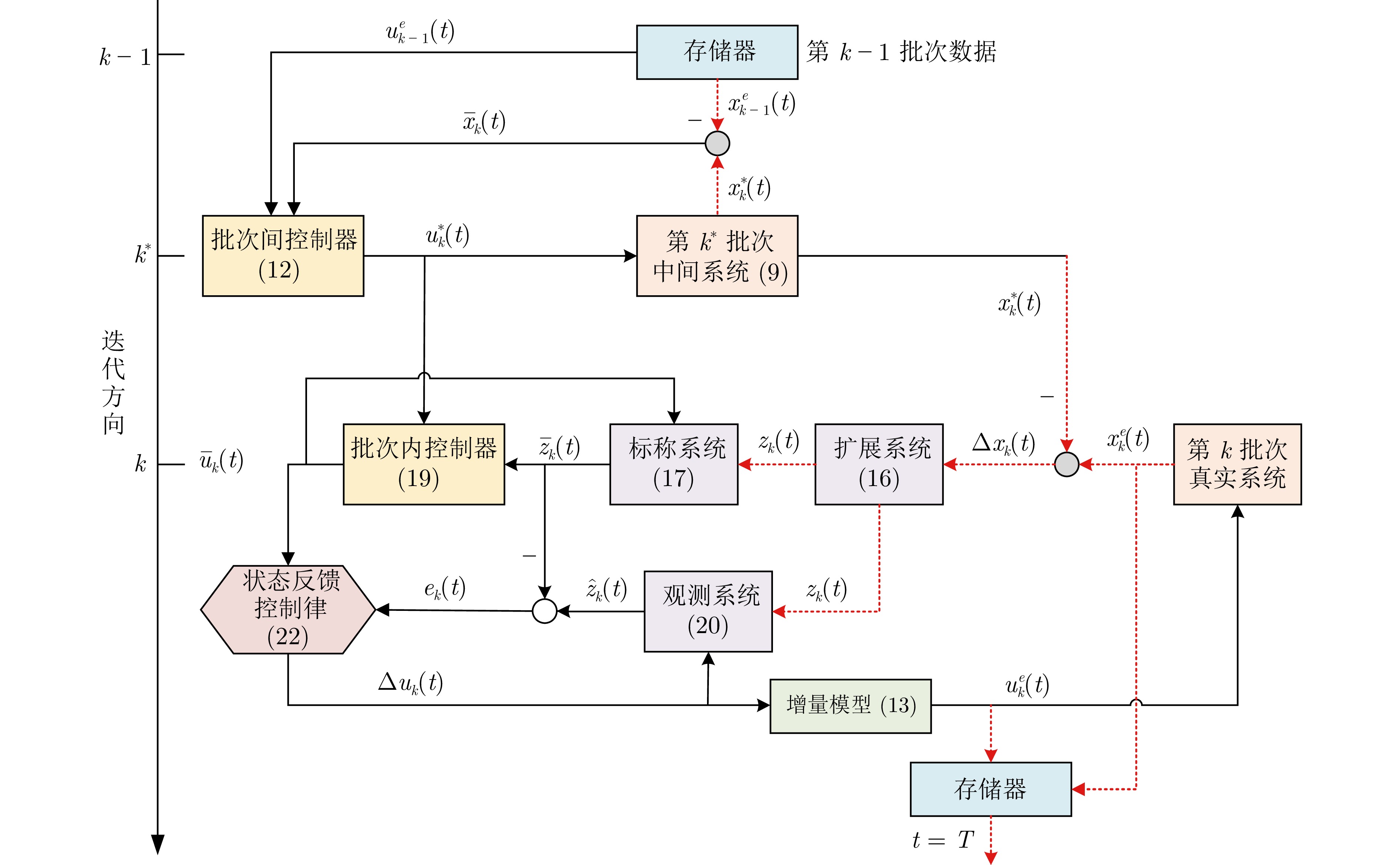
摘要: 迭代学习模型预测控制作为一种重要的批次过程先进控制方法, 具备较强的学习能力和闭环性能. 传统的迭代学习模型预测控制算法能有效消除重复扰动影响, 同时对小范围实时扰动鲁棒性较强. 当被控系统存在较大实时干扰时, 经济性能和系统稳定性通常难以保障. 对此, 提出一种面向非重复扰动的自适应迭代学习经济模型预测控制策略, 沿迭代方向和时间方向对系统动态进行分解, 将系统扰动拆分为重复部分和非重复部分, 分别建立批次间和批次内的动态经济优化问题. 批次间执行基于迭代学习控制的离线经济优化, 消除重复扰动影响; 批次内引入扩展状态观测器对非重复扰动进行估计, 基于批次间优化结果在线实施经济模型预测控制, 在抑制实时扰动的同时提高系统动态经济性. 论文结合观测器稳定性分析方法, 对所提自适应迭代学习经济模型预测控制策略的稳定性进行理论证明, 并通过间歇反应器仿真实验对算法实施有效性进行验证.Abstract: Iterative learning model predictive control, as an important advanced control method for batch processes, has strong learning capability and closed-loop performance. The traditional iterative learning model predictive control algorithm can effectively eliminate the effect of repetitive disturbances, and at the same time, it is robust to small-scale real-time disturbances. When there is a large real-time disturbance in the controlled system, the economic performance and system stability are usually difficult to guarantee. In this paper, an adaptive iterative learning economic model predictive control strategy for non-repetitive disturbances is proposed to decompose the system dynamics along the iteration direction and time direction, to split the system disturbances into repetitive and non-repetitive parts, and to establish the dynamic economic optimization problems in the batch-to-batch design and within-batch design, respectively. The batch-to-batch design is to apply offline economic optimization based on iterative learning control to eliminate the effects of repetitive disturbances; and the within-batch design is to estimate the non-repetitive disturbances by introducing an extended state observer, and economic model predictive control is implemented online based on the batch-to-batch optimization results, which improves the dynamic economy of the system while suppressing real-time disturbances. The stability of the proposed adaptive iterative learning economic model predictive control strategy is theoretically demonstrated by combining the observer stability analysis method, and the effectiveness of the algorithm implementation is verified by batch reactor simulation experiments.
-
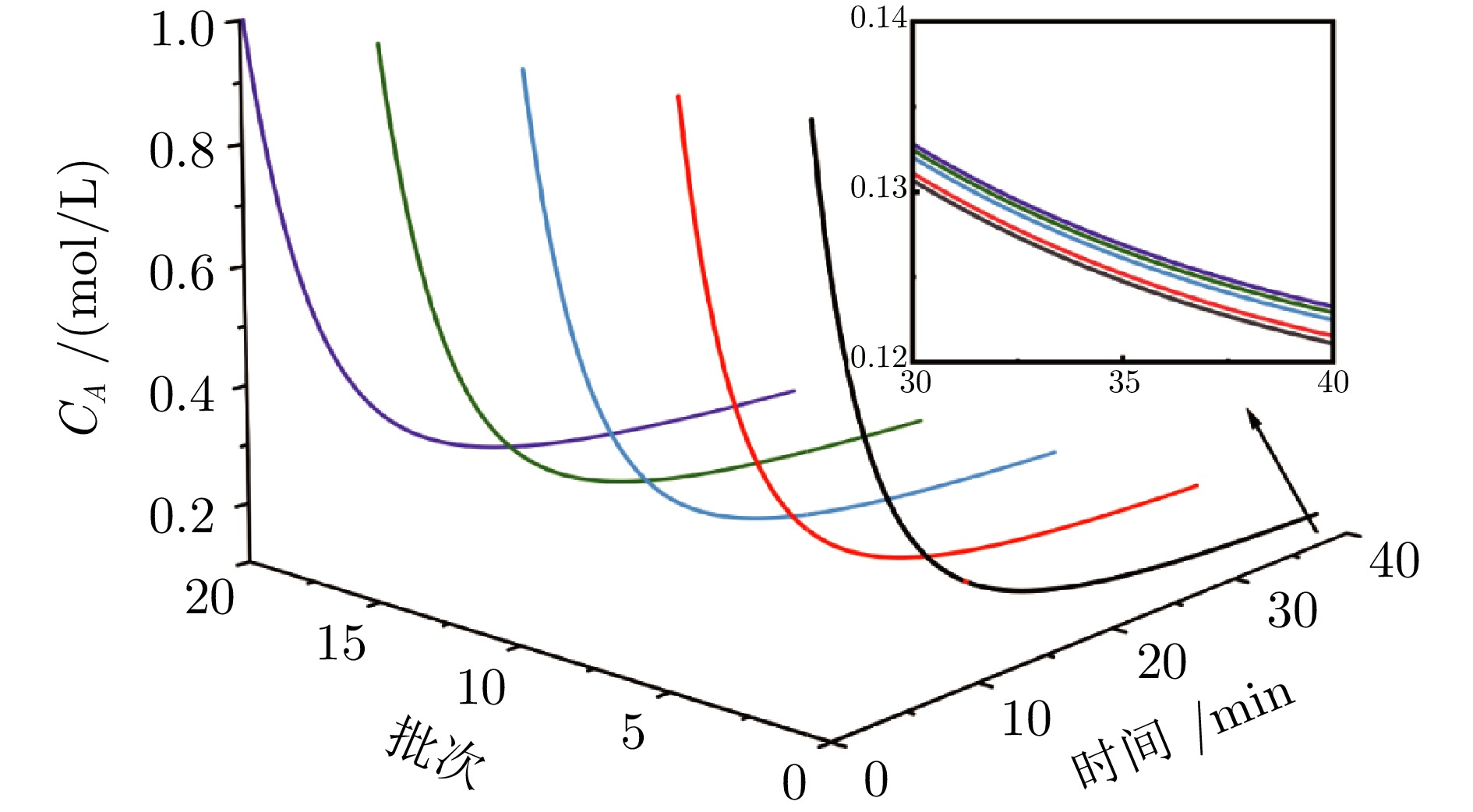
图 2 ILEMPC下反应物$A$浓度$(C_A)$的变化曲线
Fig. 2 The change curves of the concentration of reactant $A$ $(C_A)$ under the ILEMPC
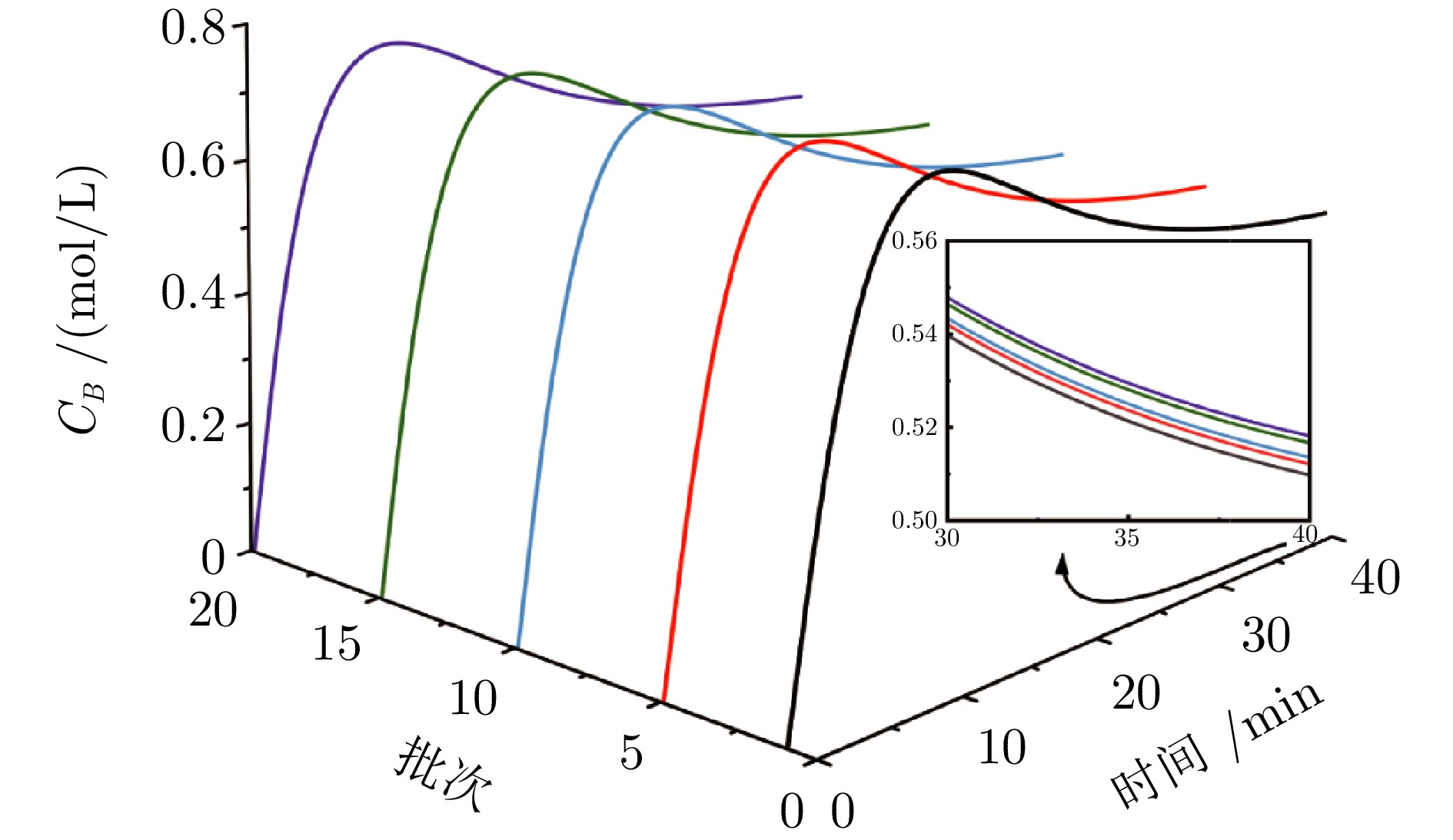
图 3 ILEMPC下反应物$B$浓度$(C_B)$的变化曲线
Fig. 3 The change curves of the concentration of reactant $B$ $(C_B)$ under the ILEMPC
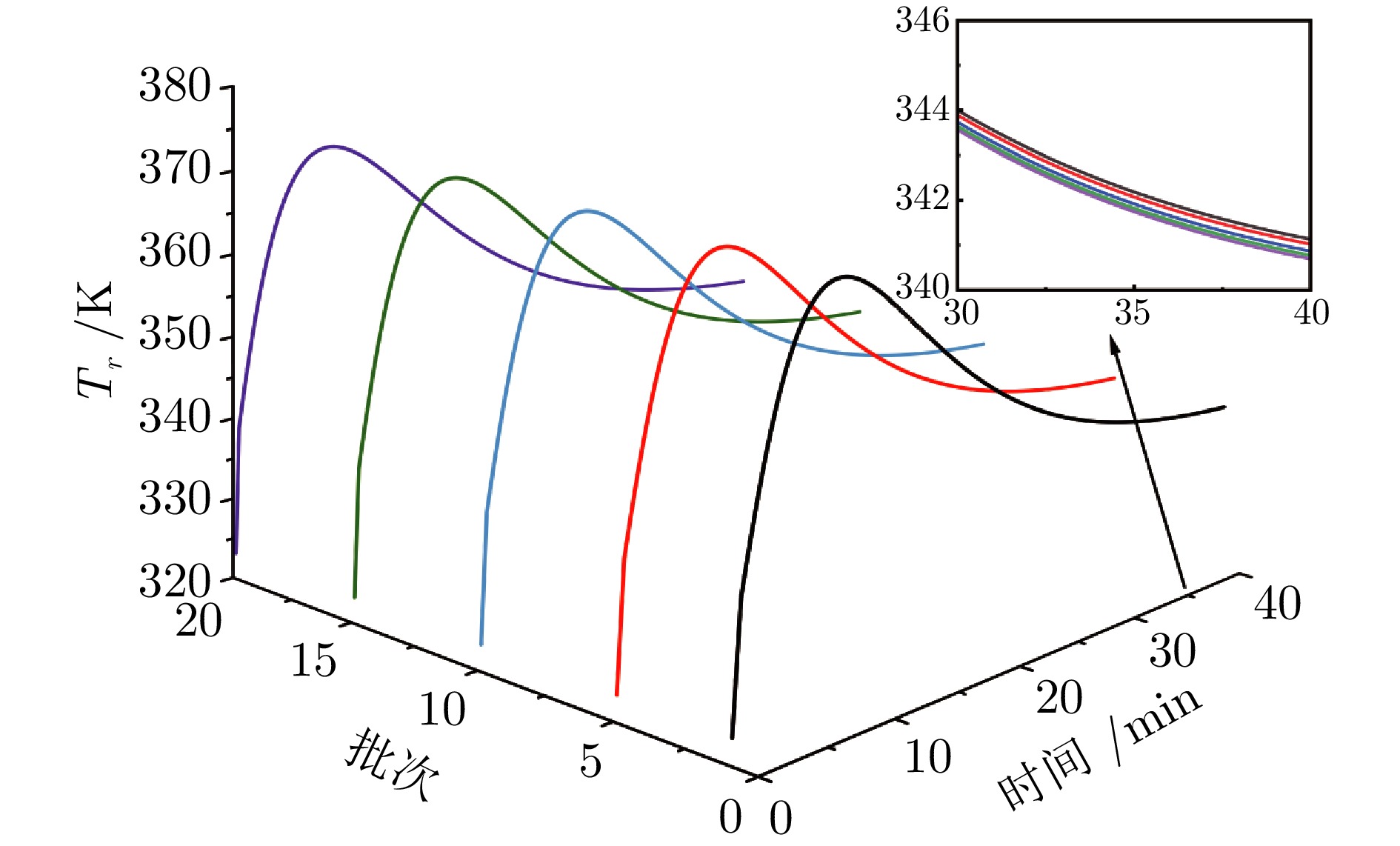
图 4 ILEMPC下反应温度$(T_r)$的变化曲线
Fig. 4 The change curves of the reaction temperature $(T_r)$ under the ILEMPC
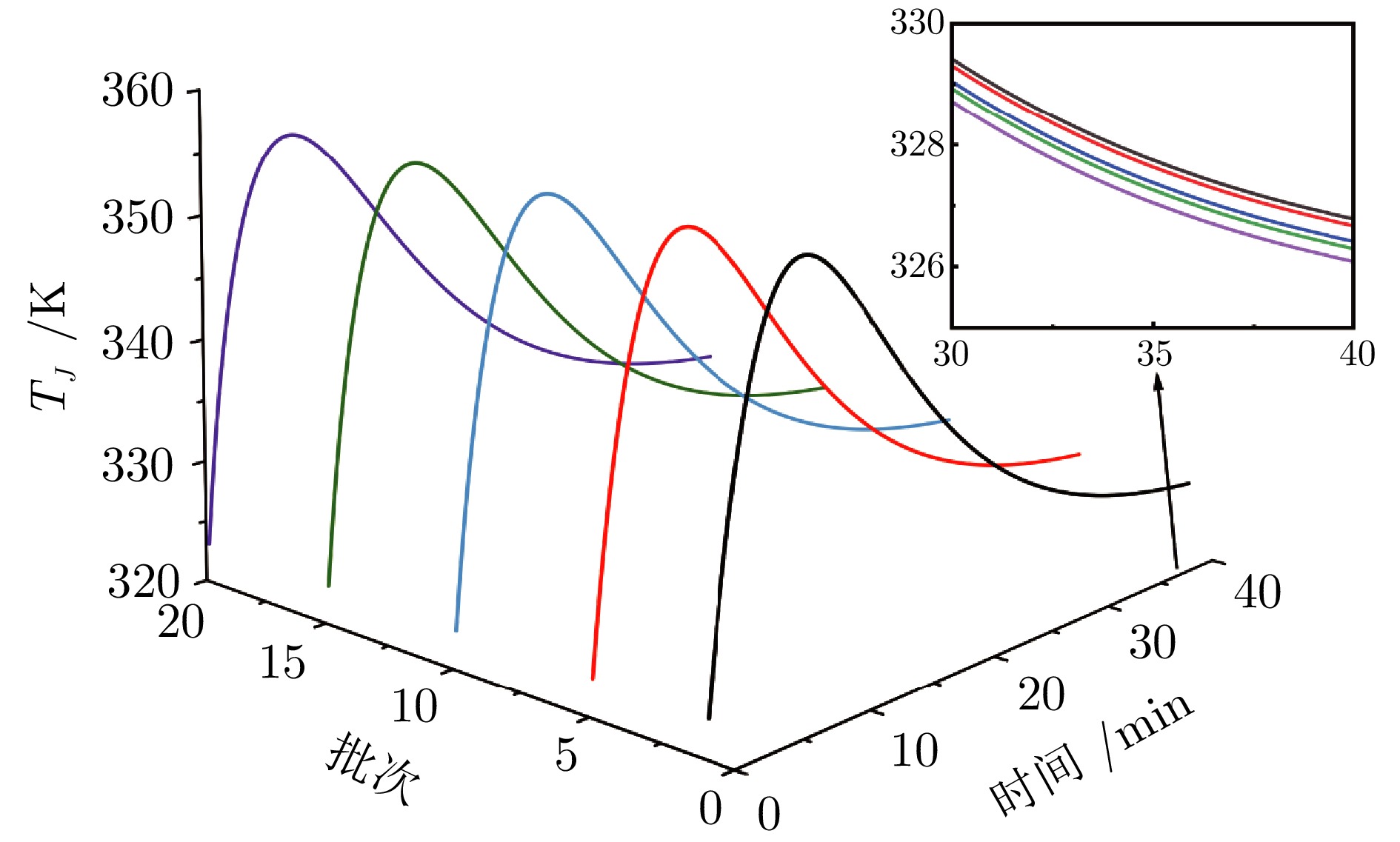
图 5 ILEMPC下冷却夹套温度$(T_J)$的变化曲线
Fig. 5 The change curves of the temperature of the cooling jacket $(T_J)$ under the ILEMPC
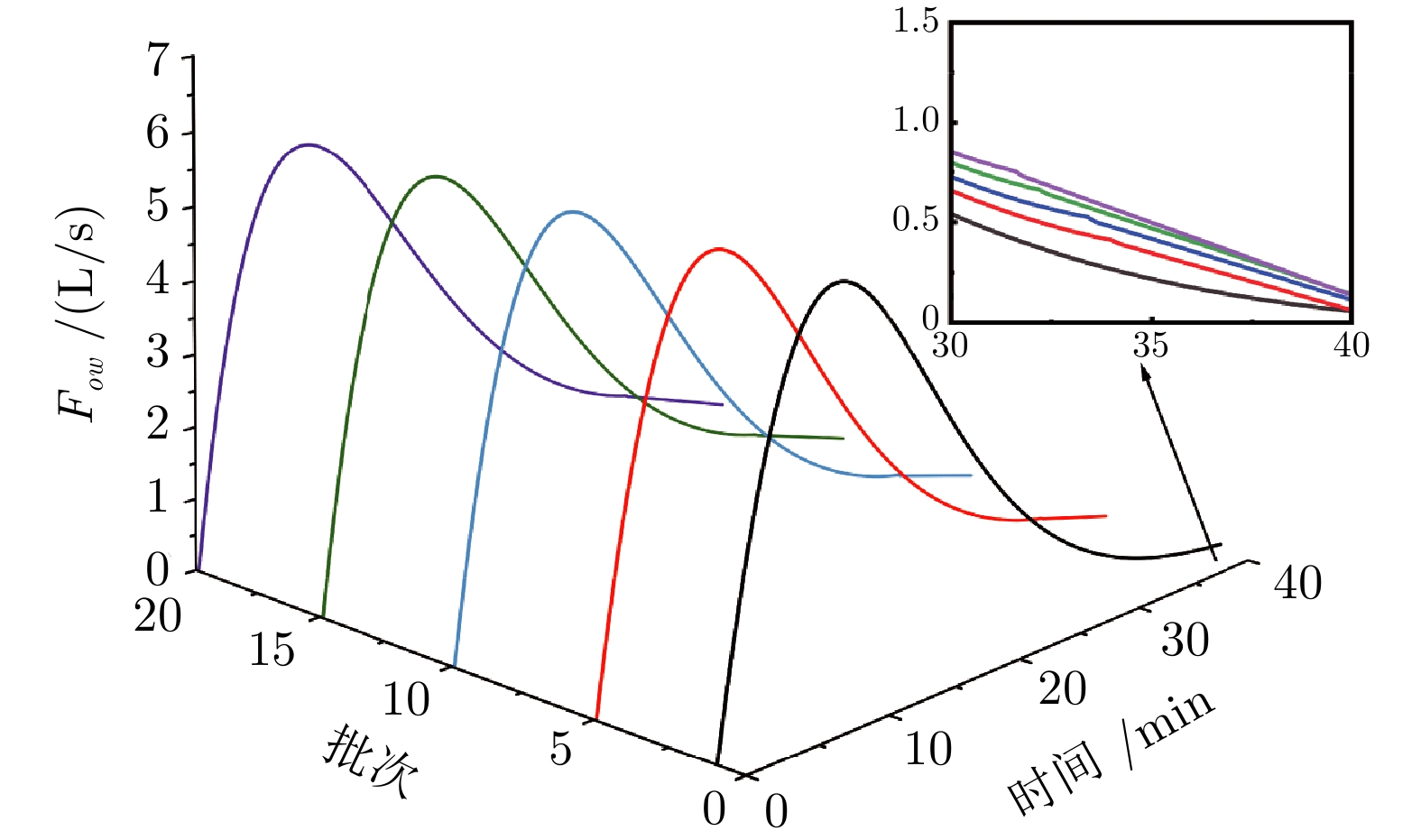
图 6 ILEMPC下冷却水流速$(F_{ow})$的变化曲线
Fig. 6 The change curves of the cooling water flow rate $(F_{ow})$ under the ILEMPC
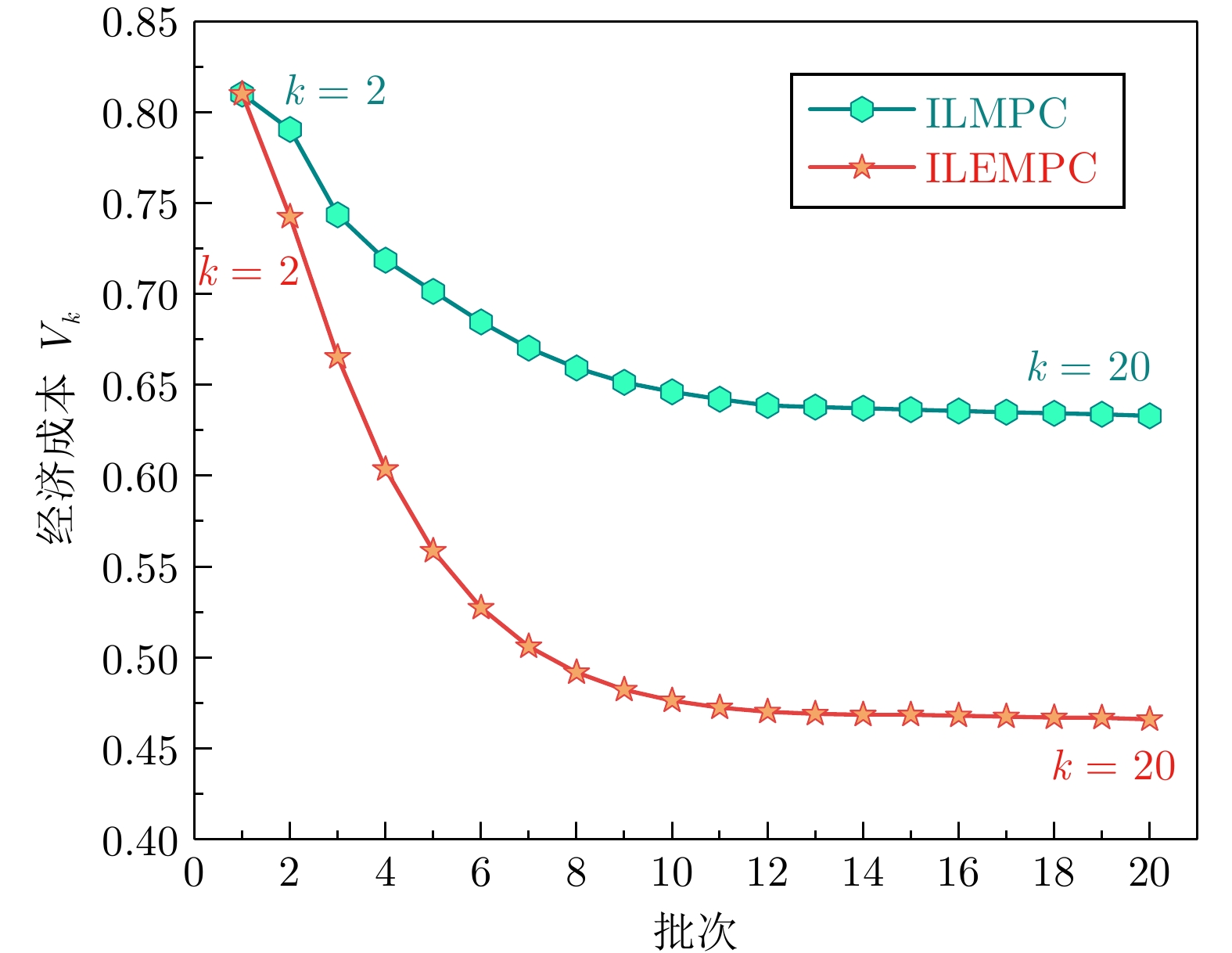
图 7 重复扰动下ILEMPC与ILMPC系统经济成本$(V_k)$变化曲线
Fig. 7 The change curves of the economic cost $(V_k)$ of ILEMPC and ILMPC systems under repetitive disturbances
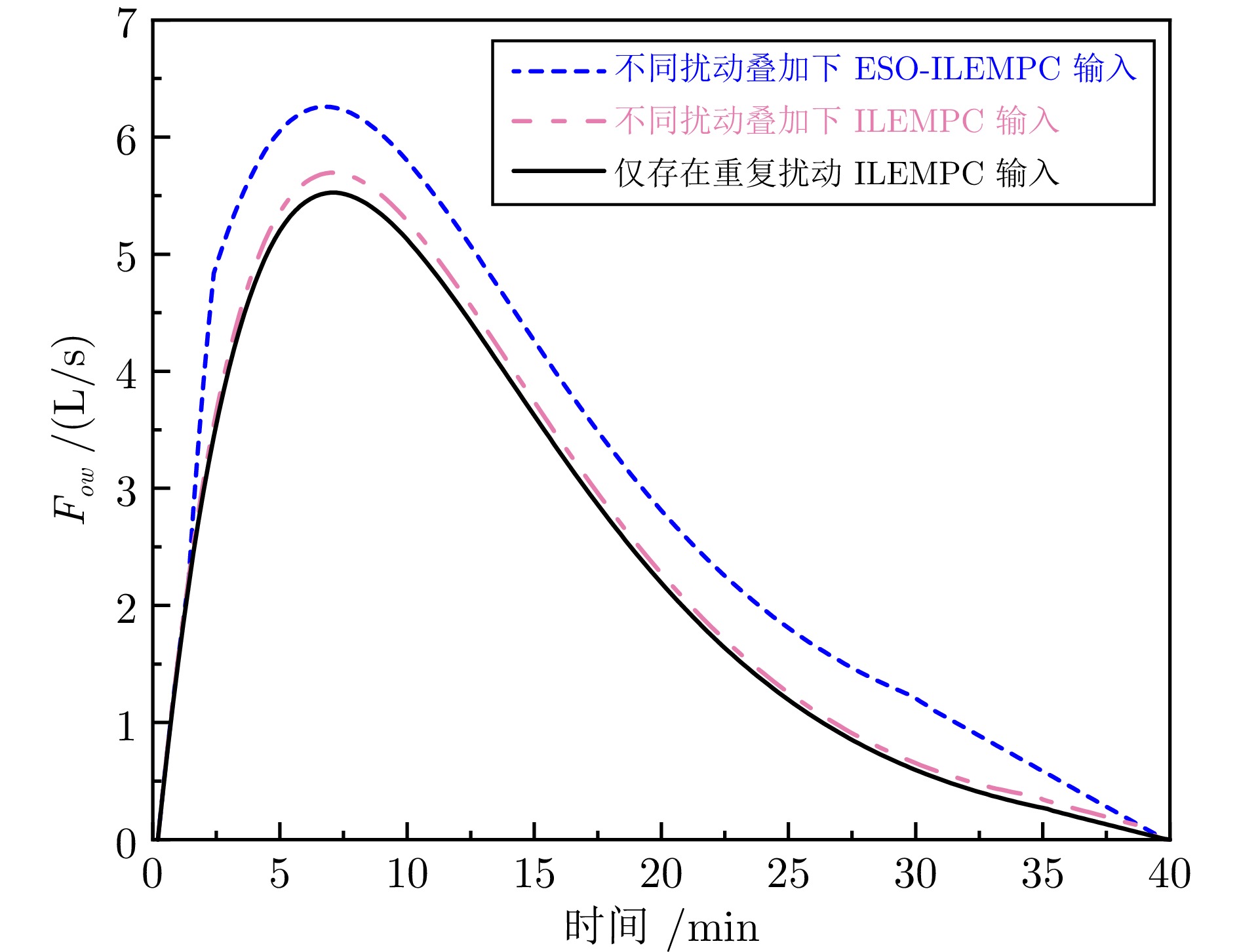
图 8 不同扰动下ESO-ILEMPC与ILEMPC系统输入$(F_{ow})$变化曲线
Fig. 8 The change curves of the input $(F_{ow})$ for ESO-ILEMPC and ILEMPC under different disturbances
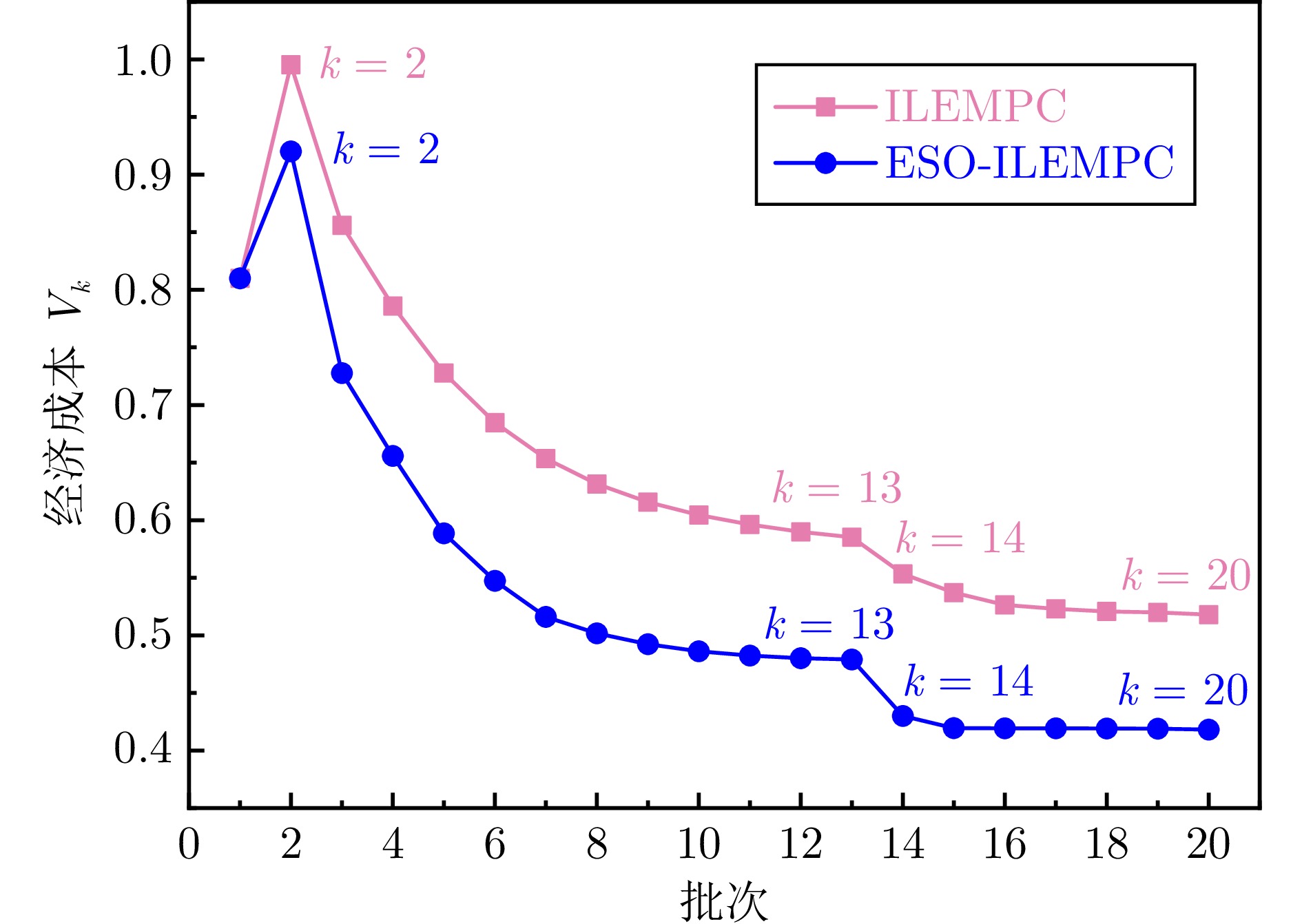
图 9 非重复扰动下ESO-ILEMPC与ILEMPC系统经济成本$(V_k)$变化曲线
Fig. 9 The change curves of the economic cost $(V_k)$ of ESO-ILEMPC and ILEMPC systems under non-repetitive disturbances
表 1 非重复扰动下ESO-ILEMPC与ILEMPC系统经济成本比较
Table 1 The comparison of the economic cost of ESO-ILEMPC and ILEMPC systems under non-repetitive disturbances
控制器 经济成本$ {(k=2)} $ 经济成本$ {(k=13)} $ 经济成本$ {(k=20)} $ ESO-ILEMPC 0.9201 (−7.56%)0.4789 (−18.15%)0.4182 (−19.27%)ILEMPC 0.9954 0.5851 0.5180  下载: 导出CSV
下载: 导出CSV
-
[1] 卢静宜, 曹志兴, 高福荣. 批次过程控制——回顾与展望. 自动化学报, 2017, 43(6): 933−943 doi: 10.16383/j.aas.2017.c170131Lu Jing-Yi, Cao Zhi-Xing, Gao Fu-Rong. Batch process control——Overview and outlook. Acta Automatica Sinica, 2017, 43(6): 933−943 doi: 10.16383/j.aas.2017.c170131 [2] Sahu J N, Gangadharan P, Patwardhan A V, Meikap B C. Catalytic hydrolysis of urea with fly ash for generation of ammonia in a batch reactor for flue gas conditioning and NOx reduction. Industrial & Engineering Chemistry Research, 2009, 48(2): 727−734 doi: 10.1021/ie801491j [3] Zhou Y Q, Tang X P, Li D W, Lai X, Gao F R. Combined iterative learning and model predictive control scheme for nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(6): 3558−3567 doi: 10.1109/TSMC.2024.3368108 [4] 池荣虎, 侯忠生, 黄彪. 间歇过程最优迭代学习控制的发展: 从基于模型到数据驱动. 自动化学报, 2017, 43(6): 917−932 doi: 10.16383/j.aas.2017.c170086Chi Rong-Hu, Hou Zhong-Sheng, Huang Biao. Optimal iterative learning control of batch processes: From model-based to data-driven. Acta Automatica Sinica, 2017, 43(6): 917−932 doi: 10.16383/j.aas.2017.c170086 [5] Oh S K, Lee J M. Iterative learning model predictive control for constrained multivariable control of batch processes. Computers & Chemical Engineering, 2016, 93: 284−292 doi: 10.1016/j.compchemeng.2016.07.011 [6] Lee K S, Chin I S, Lee H J, Lee J H. Model predictive control technique combined with iterative learning for batch processes. AIChE Journal, 1999, 45(10): 2175−2187 doi: 10.1002/aic.690451016 [7] Zhang S Y, Li X D, Li X F. A novel event-triggered iterative learning model predictive control for linear systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(12): 7619−7632 doi: 10.1109/TSMC.2024.3450126 [8] Cui P, Gao C S, An R M. Fault-observer-based iterative learning model predictive controller for trajectory tracking of hypersonic vehicles. Journal of Systems Engineering and Electronics, 2025, 36(3): 803−813 doi: 10.23919/JSEE.2025.000033 [9] Li X F, Shen D, Ding B C. Iterative learning control for output tracking of nonlinear systems with unavailable state information. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(9): 5085−5092 doi: 10.1109/TNNLS.2021.3062633 [10] Long Y S, Xie L H, Liu S. Nontracking type iterative learning control based on economic model predictive control. International Journal of Robust and Nonlinear Control, 2020, 30(18): 8564−8582 doi: 10.1002/rnc.5261 [11] Ławryńczuk M, Marusak P, Tatjewski P. Multilayer and integrated structures for predictive control and economic optimisation. IFAC Proceedings Volumes, 2007, 40(9): 198−205 doi: 10.3182/20070723-3-PL-2917.00032 [12] He D F, Zhan W J, Kang Y, Li L M. Gaussian process-based economic MPC with delay compensation for SNCR-SCR combined denitration systems. Industrial & Engineering Chemistry Research, 2024, 63(45): 19628−19639 doi: 10.1021/acs.iecr.4c02065 [13] Ellis M, Durand H, Christofides P D. A tutorial review of economic model predictive control methods. Journal of Process Control, 2014, 24(8): 1156−1178 doi: 10.1016/j.jprocont.2014.03.010 [14] Zhang S Z, Li J, Zhao D Y, Spurgeon S K. Output feedback distributed economic model predictive control for parallel system in process networks. IMA Journal of Mathematical Control and Information, 2024, 41(3): 564−589 doi: 10.1093/imamci/dnae025 [15] Cai X, Sun P, Chen J H, Xie L. ILC strategy for progress improvement of economic performance in industrial model predictive control systems. Journal of Process Control, 2014, 24(12): 107−118 doi: 10.1016/j.jprocont.2014.09.010 [16] Lu P C, Chen J H, Xie L. Iterative learning control (ILC)-based economic optimization for batch processes using helpful disturbance information. Industrial & Engineering Chemistry Research, 2018, 57(10): 3717−3731 doi: 10.1021/acs.iecr.7b04691 [17] Lu P C, Chen J H, Xie L. Disturbance-based alternate feedback control scheme to enhance economic performance of batch processes. Industrial & Engineering Chemistry Research, 2019, 58(10): 4143−4153 doi: 10.1021/acs.iecr.8b03813 [18] Zhou C Y, Jia L, Li J F. Improved iterative learning model predictive control for nonlinear batch processes. International Journal of Robust and Nonlinear Control, 2025, 35(6): 2130−2141 doi: 10.1002/rnc.7783 [19] Monasterios P R B, Trodden P A. Model predictive control of linear systems with preview information: Feasibility, stability, and inherent robustness. IEEE Transactions on Automatic Control, 2019, 64(9): 3831−3838 doi: 10.1109/TAC.2018.2886156 [20] Lee K S, Lee J H. Convergence of constrained model-based predictive control for batch processes. IEEE Transactions on Automatic Control, 2000, 45(10): 1928−1932 doi: 10.1109/TAC.2000.881002 [21] 昝小舒, 朱震宇, 于书韵, 徐瑞东, 冷旭东, 王怀庆. 基于双扰动观测器的开关磁阻电动机模型预测控制实验平台研究. 实验室研究与探索, 2025, 44(7): 26−32 doi: 10.19927/j.cnki.syyt.2025.07.006Zan Xiao-Shu, Zhu Zhen-Yu, Yu Shu-Yun, Xu Rui-Dong, Leng Xu-Dong, Wang Huai-Qing. Research on experimental platform for model predictive control of switched reluctance motor based on double perturbation observer. Research and Exploration in Laboratory, 2025, 44(7): 26−32 doi: 10.19927/j.cnki.syyt.2025.07.006 [22] 魏新伟, 陶万宇, 郭新宇, 黄旭程. 基于滑模扰动观测器的三相并网逆变器鲁棒模型预测控制. 太阳能学报, 2025, 46(10): 117−127 doi: 10.19912/j.0254-0096.tynxb.2025-0281Wei Xin-Wei, Tao Wan-Yu, Guo Xin-Yu, Huang Xu-Cheng. Robust model predictive control of three-phase grid-connected inverter based on sliding mode disturbance observer. Acta Energiae Solaris Sinica, 2025, 46(10): 117−127 doi: 10.19912/j.0254-0096.tynxb.2025-0281 [23] Guo L, Chen W H. Disturbance attenuation and rejection for systems with nonlinearity via DOBC approach. International Journal of Robust and Nonlinear Control, 2005, 15(3): 109−125 doi: 10.1002/rnc.978 [24] Badie K, Alfidi M, Chalh Z. An LMI approach to design robust H∞ controller for 2-D systems with delays. International Journal of System of Systems Engineering, 2019, 9(2): 99−116 doi: 10.1016/0005-1098(96)00055-6 [25] Kothare M V, Balakrishnan V, Morari M. Robust constrained model predictive control using linear matrix inequalities. Automatica, 1996, 32(10): 1361−1379 doi: 10.1016/0005-1098(96)00063-5 [26] Zhang G R, Xu Y J, Chew C M, Fu M Y. Discrete-time sliding mode-based finite-time trajectory tracking control of underactuated surface vessels with large sampling periods. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(12): 21545−21558 doi: 10.1109/TITS.2024.3449076 [27] Meng H, Zhang J H, Li S H, Sun Z Q. Adaptive receding horizon-based self-triggered constrained SMC. IEEE Transactions on Circuits and Systems II: Express Briefs, 2024, 71(2): 737−741 doi: 10.1109/tcsii.2023.3308071 [28] Liu Z T, He W K, Li X B, Liu C G, Shao H Z, Fu P. A mismatched composite disturbance observer-based adaptive tracking controller for robotic manipulators. IET Control Theory & Applications, 2024, 18(11): 1357−1370 doi: 10.1049/cth2.12690 [29] Raouf A H, Yazdiniya F S, Ansarifar G R. Super-twisting ADRC for maximum power point tracking control of photovoltaic power generation system based on non-linear extended state observer. Heliyon, 2024, 10(16): Article No. e36428 doi: 10.1016/j.heliyon.2024.e36428 [30] 李伟鹏, 刘泽书, 包泽宇, 乔建忠, 朱玉凯. 基于改进ESO的星间激光通信精跟踪自适应自抗扰控制. 自动化学报, 2025, 51(12): 2633−2647Li Wei-Peng, Liu Ze-Shu, Bao Ze-Yu, Qiao Jian-Zhong, Zhu Yu-Kai. Adaptive ADRC for the fine tracking system in inter-satellite laser communication based on improved ESO. Acta Automatica Sinica, 2025, 51(12): 2633−2647 [31] Li Z H, Shen D. Finite-iteration learning control for nonlinear systems with parameter uncertainties. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(9): 6409−6422 doi: 10.1109/TSMC.2025.3578604 [32] Diehl M, Amrit R, Rawlings J B. A Lyapunov function for economic optimizing model predictive control. IEEE Transactions on Automatic Control, 2011, 56(3): 703−707 doi: 10.1109/TAC.2010.2101291 [33] Angeli D, Amrit R, Rawlings J B. On average performance and stability of economic model predictive control. IEEE Transactions on Automatic Control, 2012, 57(7): 1615−1626 doi: 10.1109/TAC.2011.2179349 [34] Amrit R, Rawlings J B, Angeli D. Economic optimization using model predictive control with a terminal cost. Annual Reviews in Control, 2011, 35(2): 178−186 doi: 10.1016/j.arcontrol.2011.10.011 [35] Grüne L. Economic receding horizon control without terminal constraints. Automatica, 2013, 49(3): 725−734 doi: 10.1016/j.automatica.2012.12.003 [36] Müller M A, Grüne L. Economic model predictive control without terminal constraints for optimal periodic behavior. Automatica, 2016, 70: 128−139 doi: 10.1016/j.automatica.2016.03.024 [37] 何德峰, 韩平, 王青松. 有界扰动下约束非线性系统鲁棒经济模型预测控制. 自动化学报, 2022, 48(2): 572−581 doi: 10.16383/j.aas.c190879He De-Feng, Han Ping, Wang Qing-Song. Robust economic MPC of constrained nonlinear systems with bounded disturbances. Acta Automatica Sinica, 2022, 48(2): 572−581 doi: 10.16383/j.aas.c190879 [38] 马乐乐, 刘向杰, 高福荣. 基于知识迁移的数据驱动迭代学习模型预测控制. 中国科学: 信息科学, 2024, 54(7): 1752−1774 doi: 10.1360/SSI-2023-0279Ma Le-Le, Liu Xiang-Jie, Gao Fu-Rong. Data-driven iterative learning model predictive control based on knowledge transfer. SCIENTIA SINICA Informationis, 2024, 54(7): 1752−1774 doi: 10.1360/SSI-2023-0279 [39] Pannocchia G, Rawlings J B. Disturbance models for offset-free model-predictive control. AIChE Journal, 2003, 49(2): 426−437 [40] Cannon M, Cheng Q F, Kouvaritakis B, Raković S V. Stochastic tube MPC with state estimation. Automatica, 2012, 48(3): 536−541 doi: 10.1016/j.automatica.2011.08.058 [41] Liu X J, Guo S F, Kong X B, Ma L L, Lee K Y. Offset-free stochastic MPC for uncertain wind energy conversion system. IEEE Transactions on Industrial Informatics, 2024, 20(7): 9487−9496 doi: 10.1109/TII.2024.3384525 [42] 谭程元, 王晶. 基于扩张状态观测器的鲁棒迭代学习控制. 控制理论与应用, 2018, 35(11): 1680−1686 doi: 10.7641/CTA.2018.80316Tan Cheng-Yuan, Wang Jing. Robust iterative learning control based on extended state observer. Control Theory & Applications, 2018, 35(11): 1680−1686 doi: 10.7641/CTA.2018.80316 [43] 马乐乐, 刘向杰, 高福荣. 迭代学习模型预测控制研究现状与挑战. 自动化学报, 2022, 48(6): 1385−1401 doi: 10.16383/j.aas.c210818Ma Le-Le, Liu Xiang-Jie, Gao Fu-Rong. Status and challenges of iterative learning model predictive control. Acta Automatica Sinica, 2022, 48(6): 1385−1401 doi: 10.16383/j.aas.c210818 [44] Müller M A, Angeli D, Allgöwer F, Amrit R, Rawlings J B. Convergence in economic model predictive control with average constraints. Automatica, 2014, 50(12): 3100−3111 doi: 10.1016/j.automatica.2014.10.059 -

 下载:
下载:

计量
- 文章访问数: 319
- HTML全文浏览量: 89
- PDF下载量: 124
- 被引次数: 0
