

Microscopic Crowd Movement Modeling, Simulation, and Intervention Decision-making Framework Based on Physics-informed Machine Learning
-
摘要: 人群移动是影响城市公共安全及应急管理的重要因素, 如何对其进行高精度的建模仿真和有效干预是亟待解决的问题. 为此, 提出一种物理信息机器学习驱动的微观人群移动建模仿真与干预决策框架. 基于平行智能思想, 该框架构建“数据感知−融合建模−动态仿真−智能干预”四层闭环结构, 形成从建模仿真到策略生成、执行及反馈修正的完整链路. 针对人群的移动仿真与引导决策问题, 分别提出基于物理信息时空图卷积网络的导航势能场模型和物理信息多智能体深度确定性策略梯度算法, 有效解决了传统方法中模型准确性较差、仿真与干预孤立以及决策依赖人工经验的问题. 最后, 基于真实数据集开展仿真实验验证了所提框架的有效性.Abstract: Crowd movement is a critical factor influencing urban public safety and emergency management. How to achieve high-precision modeling, simulation and effective intervention is an urgent issue to be solved. To address these challenges, a physics-informed machine learning-driven framework for microscopic crowd movement modeling, simulation, and intervention decision-making is proposed. Based on the concept of parallel intelligence, the framework establishes a four-layer closed-loop architecture comprising data perception, fusion modeling, dynamic simulation, and intelligent intervention. This architecture forms a complete chain from modeling and simulation to strategy generation, execution, and feedback refinement. For crowd movement simulation and guidance decision-making problems, two novel methodologies are introduced in the framework: A physics-informed spatiotemporal graph convolutional network-based navigation potential field model and a physics-informed multi-agent deep deterministic policy gradient algorithm. These methods effectively resolve issues prevalent in conventional methodologies, namely, the insufficient model accuracy, disjointedness between simulation and intervention, and reliance on human experience for decision-making. Finally, simulation experiments conducted on real-world datasets confirm the effectiveness of the framework.
-
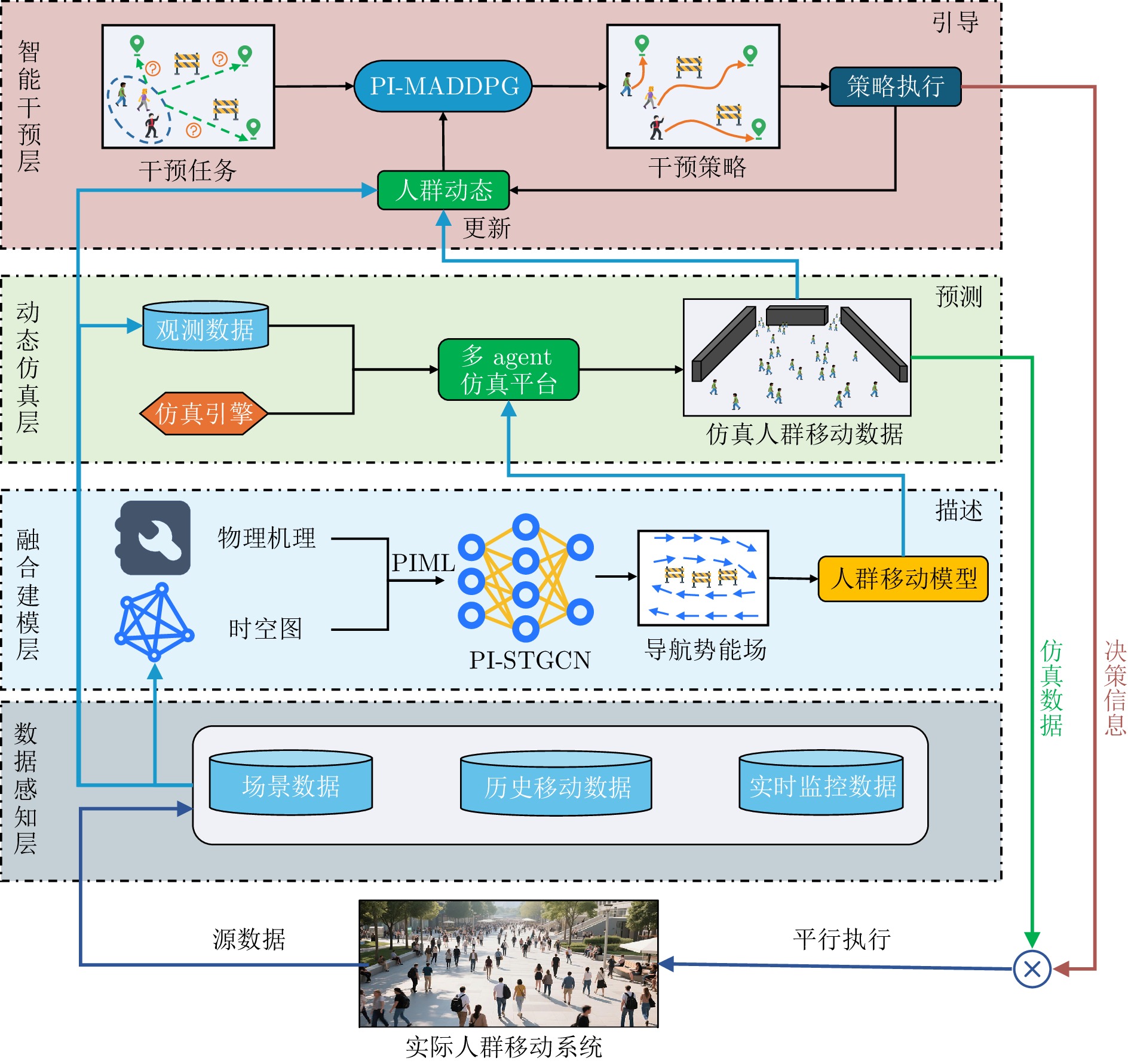
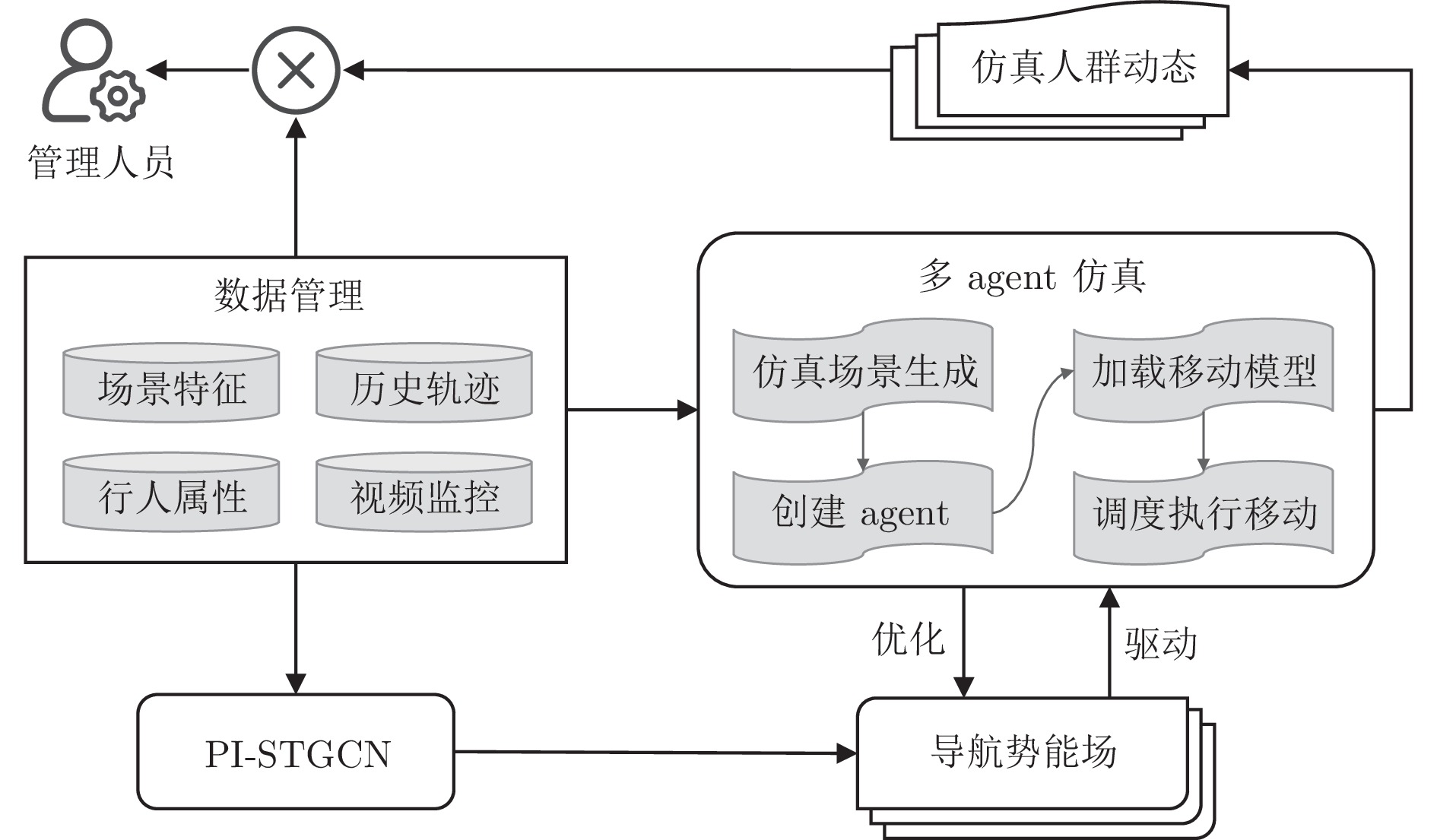
图 5 物理信息机器学习驱动的微观人群移动建模仿真与干预决策框架
Fig. 5 A PIML-driven framework for microscopic crowd movement modeling, simulation, and intervention decision-making
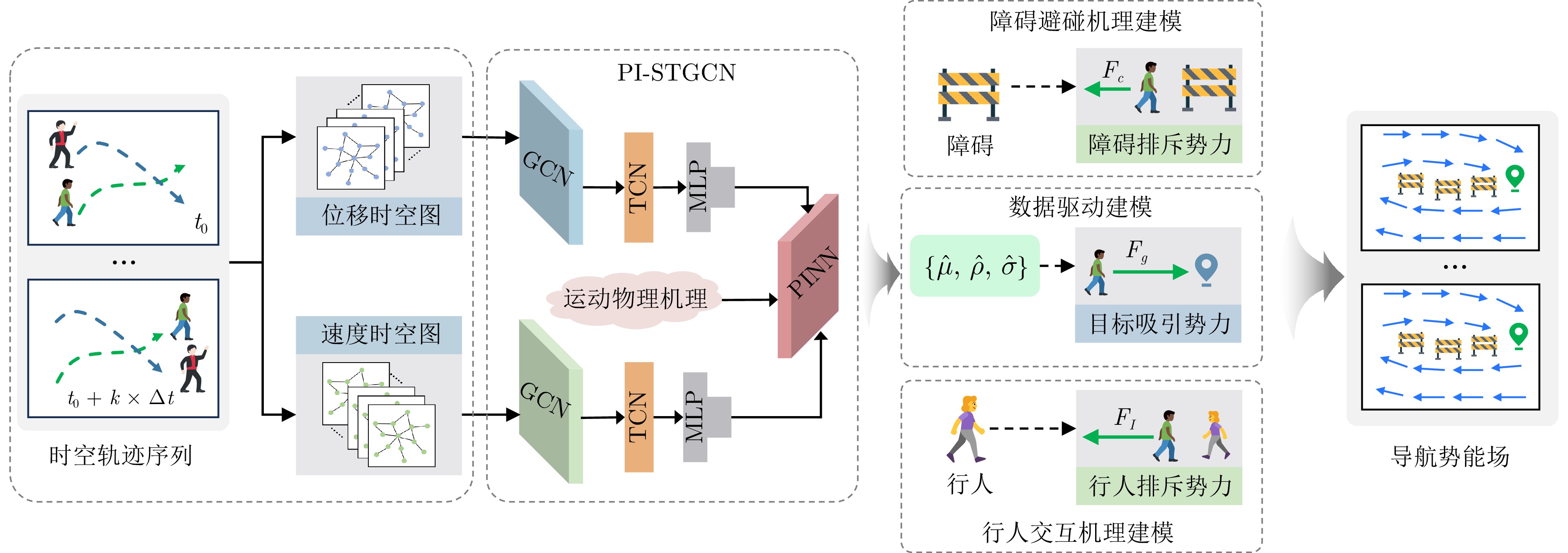
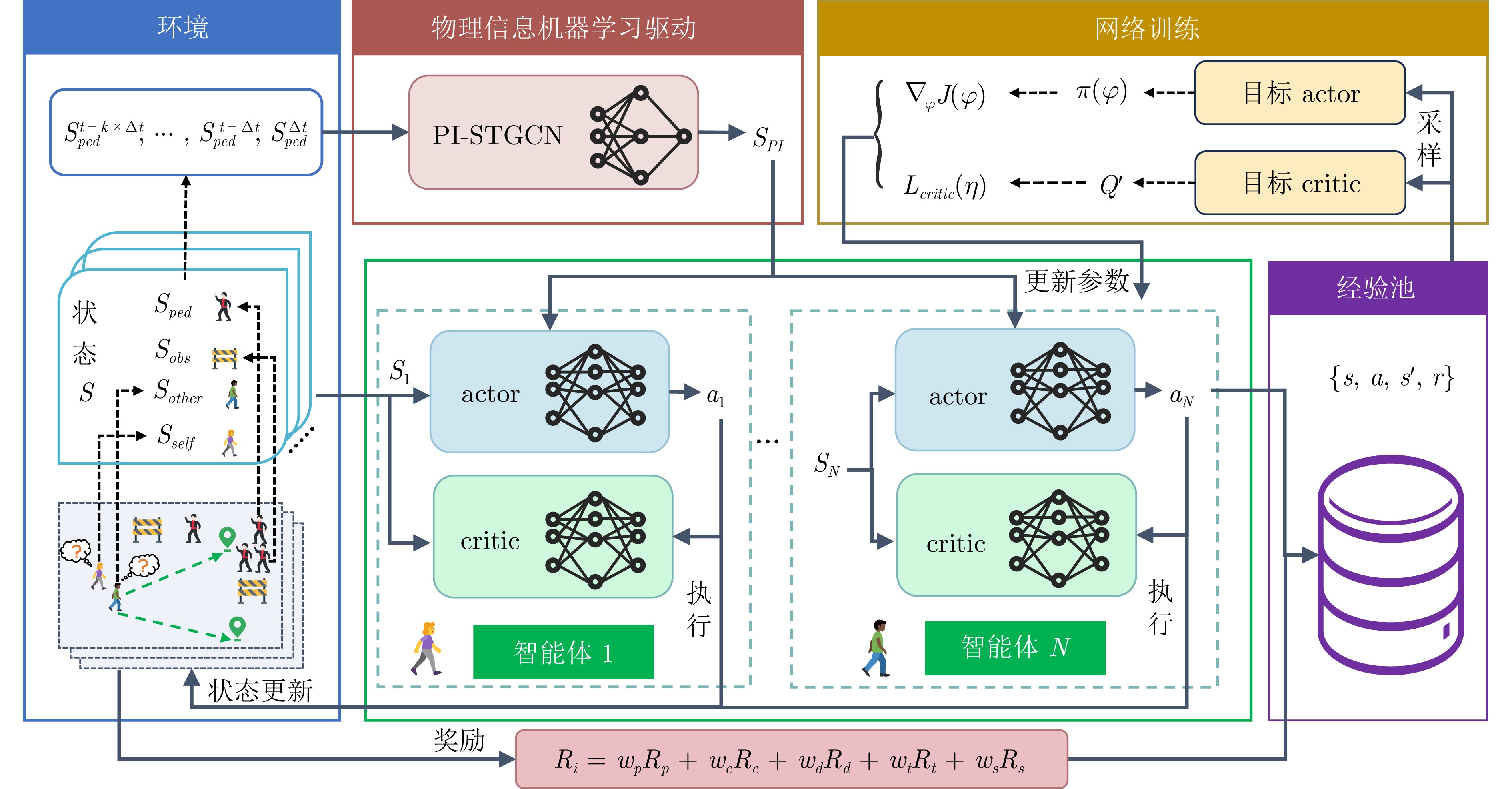
图 6 基于物理信息时空图卷积的人群移动导航势能场模型
Fig. 6 The navigation potential field model for crowd movement based on physics-informed spatiotemporal graph convolutional network
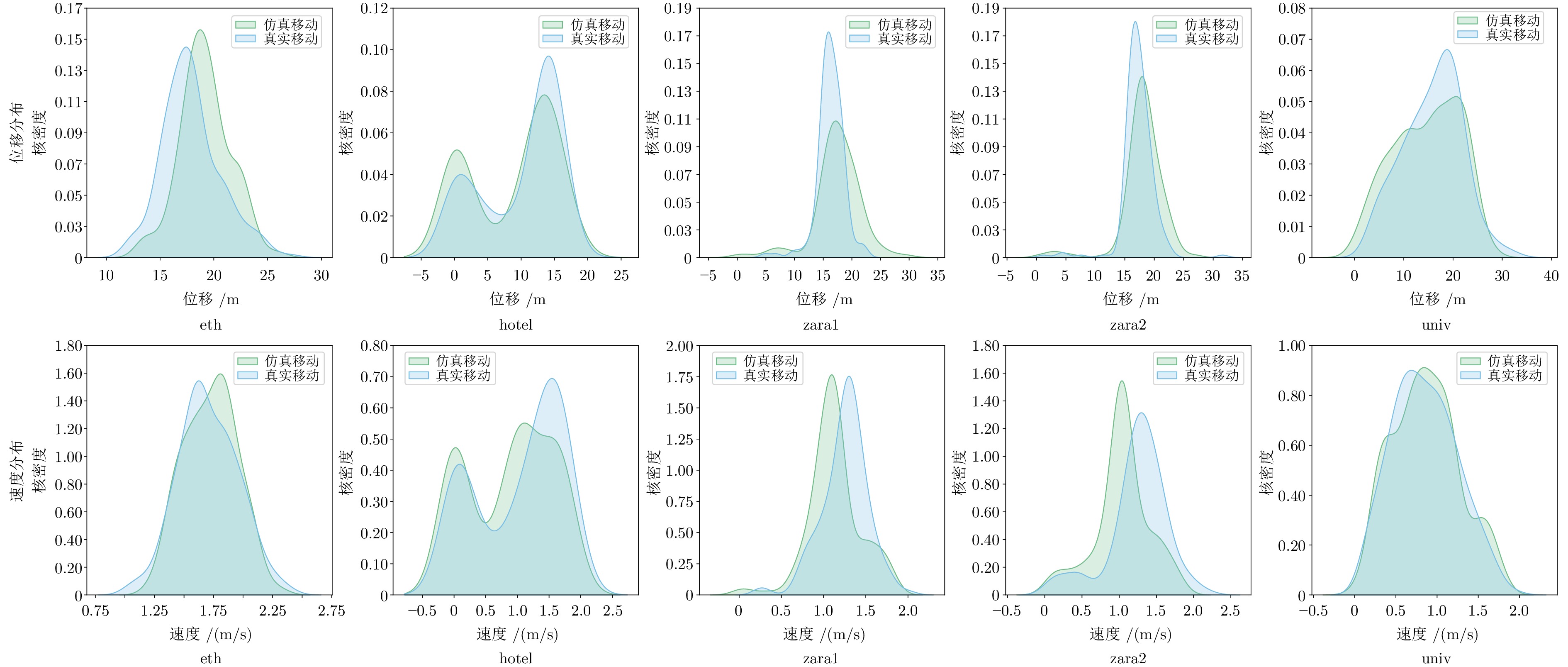
图 9 仿真移动距离和平均速度的核密度分布与真实数据对比
Fig. 9 Comparison of simulated movement distance and average velocities kernel density distributions with real data
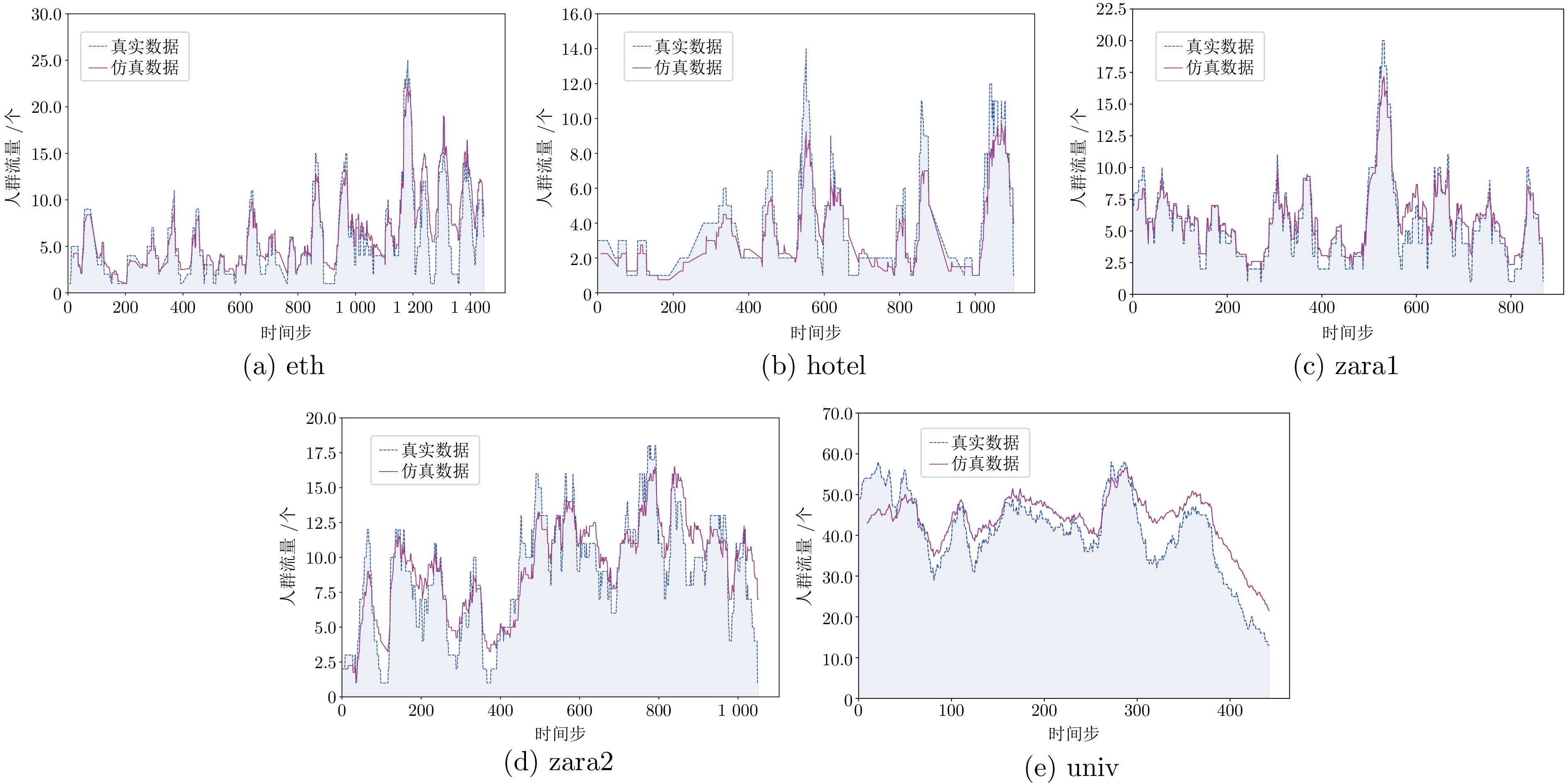
图 10 五个场景仿真人群流量变化与真实流量变化情况比较
Fig. 10 Comparison of simulated and real crowd flow variations across five scenarios
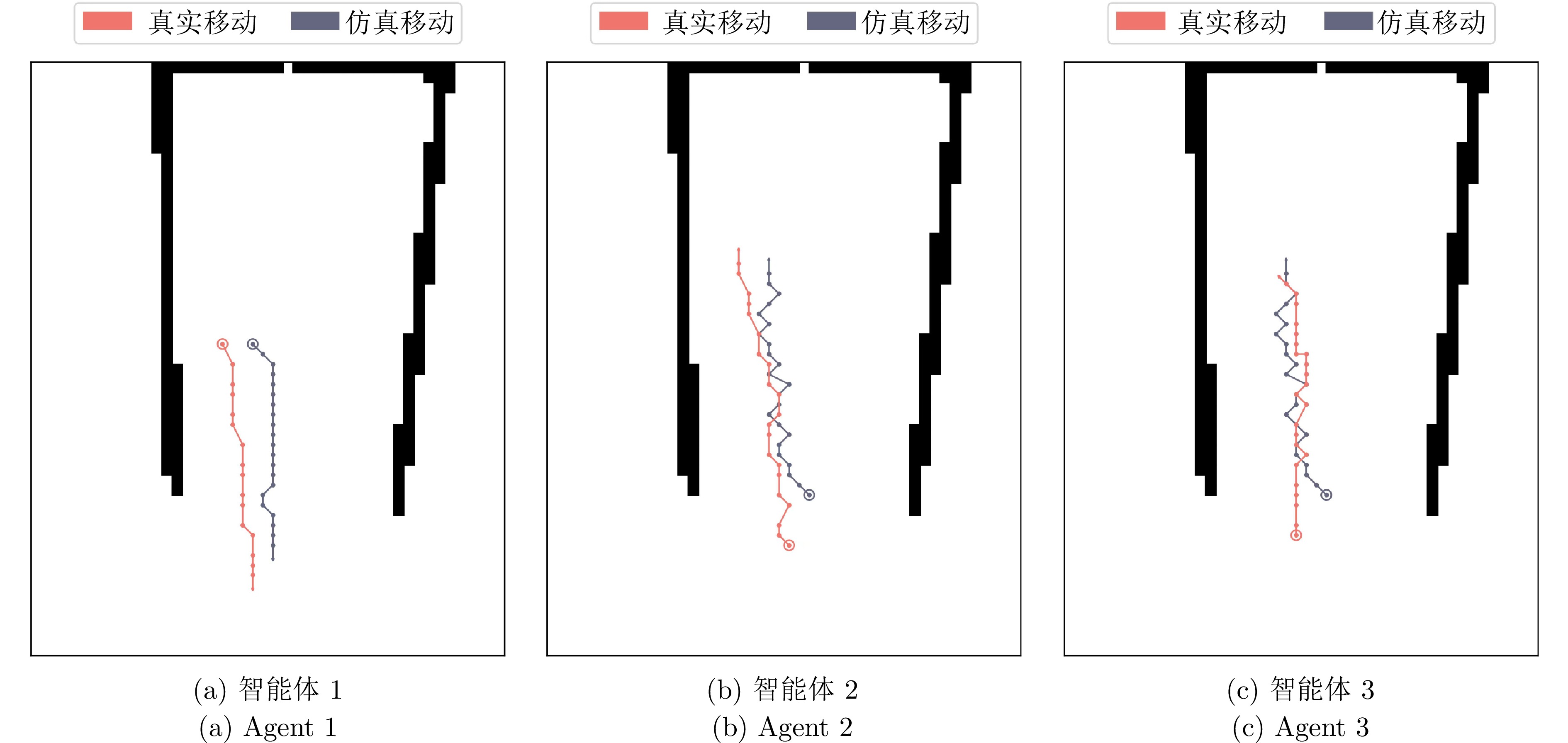
图 11 eth场景中3个行人的仿真轨迹与真实轨迹比较
Fig. 11 Comparison of simulated and real trajectories for three pedestrians in the eth scenario
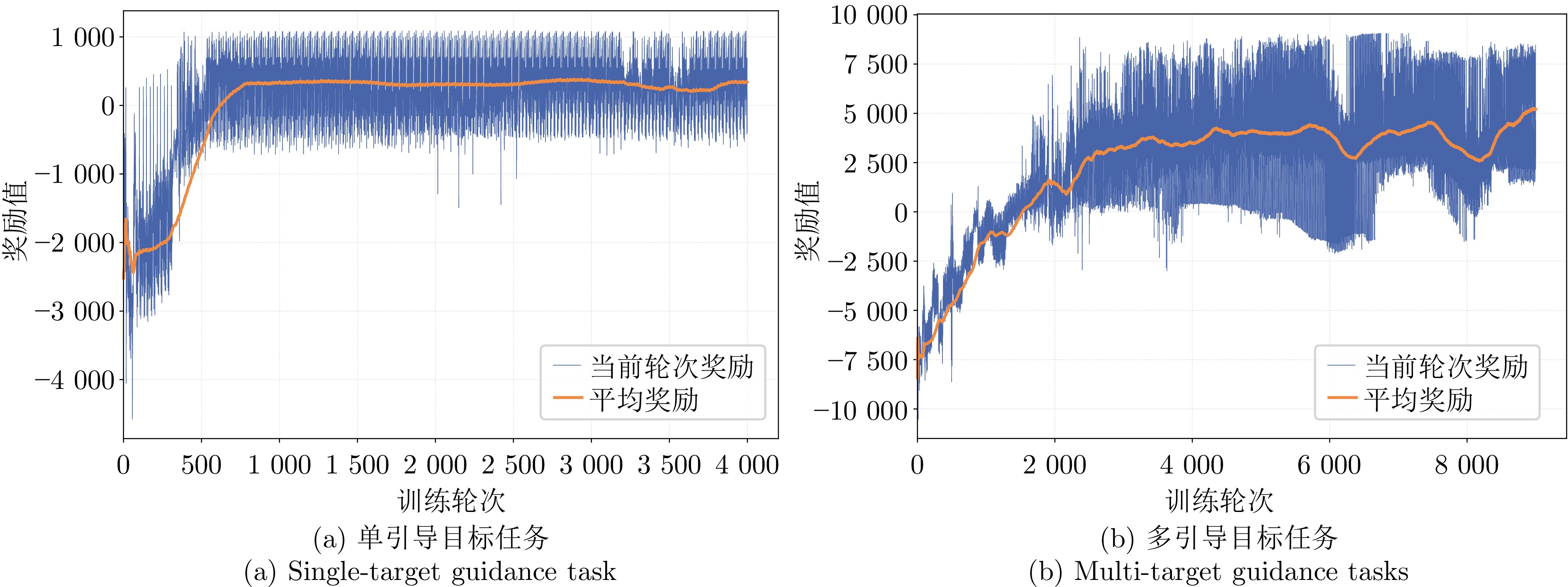
图 12 单引导目标和多引导目标任务平均奖励训练曲线
Fig. 12 Average reward training curves for single-target and multi-target guidance tasks
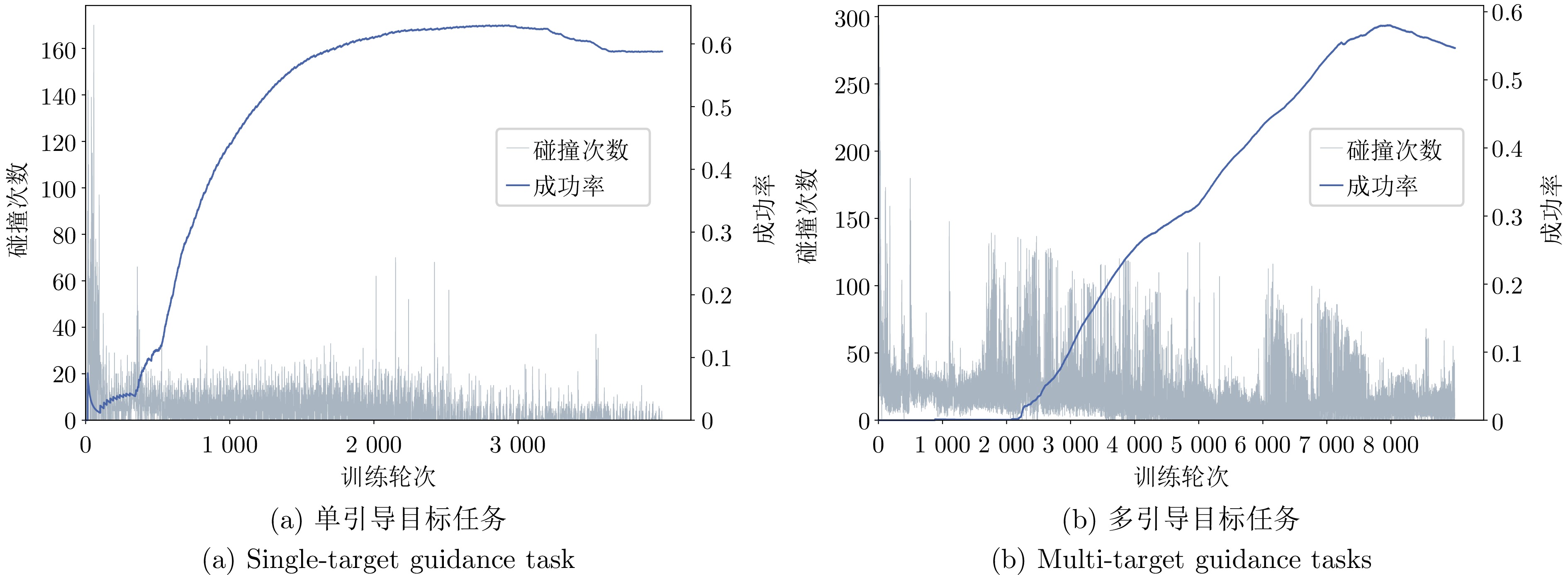
图 13 单引导目标和多引导目标任务成功率与碰撞次数训练曲线
Fig. 13 Training curves of task success rate and collision frequency for single-target and multi-target guidance tasks
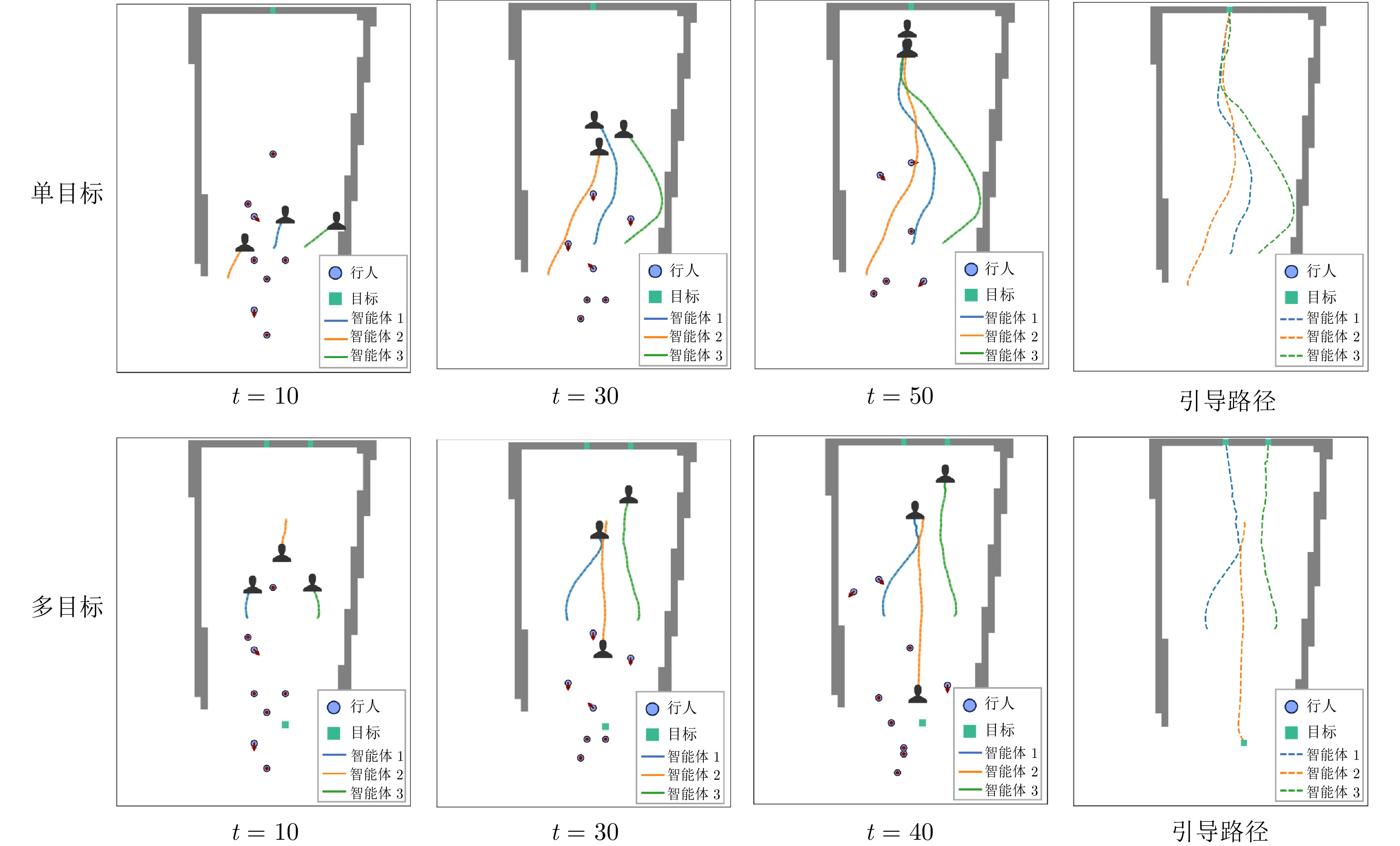
图 14 行人在引导干预下的移动瞬时状态及完整轨迹
Fig. 14 Instantaneous states and complete trajectories of pedestrian movement under guidance intervention
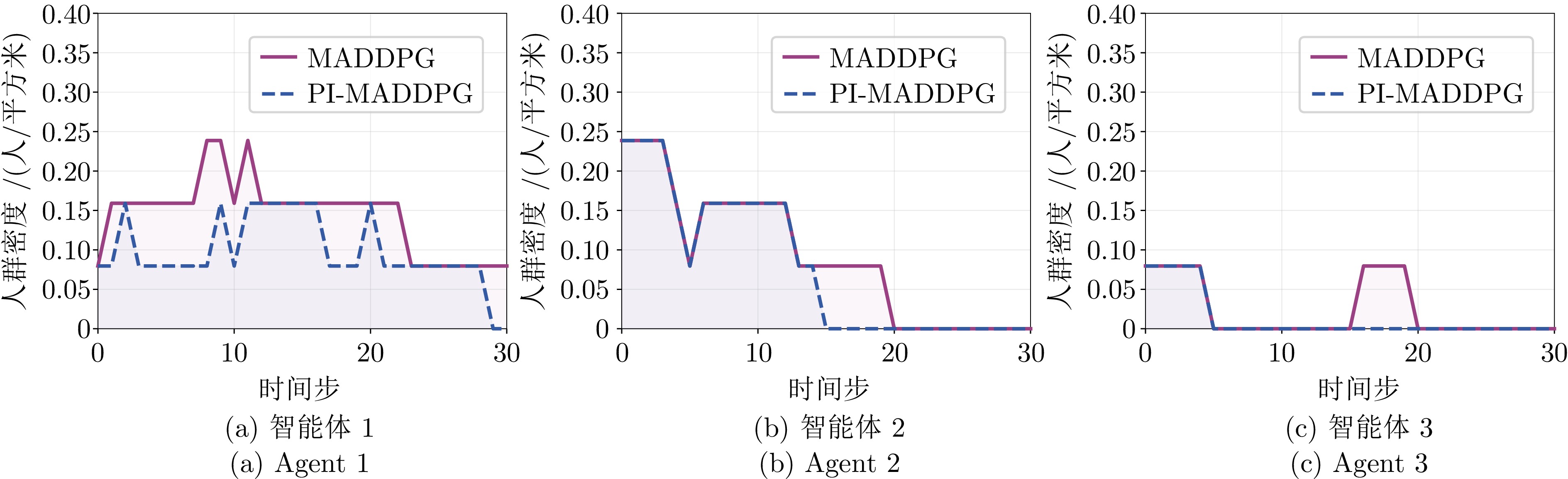
图 15 行人移动过程中周围人群密度变化
Fig. 15 Variation of local crowd density during pedestrian movement
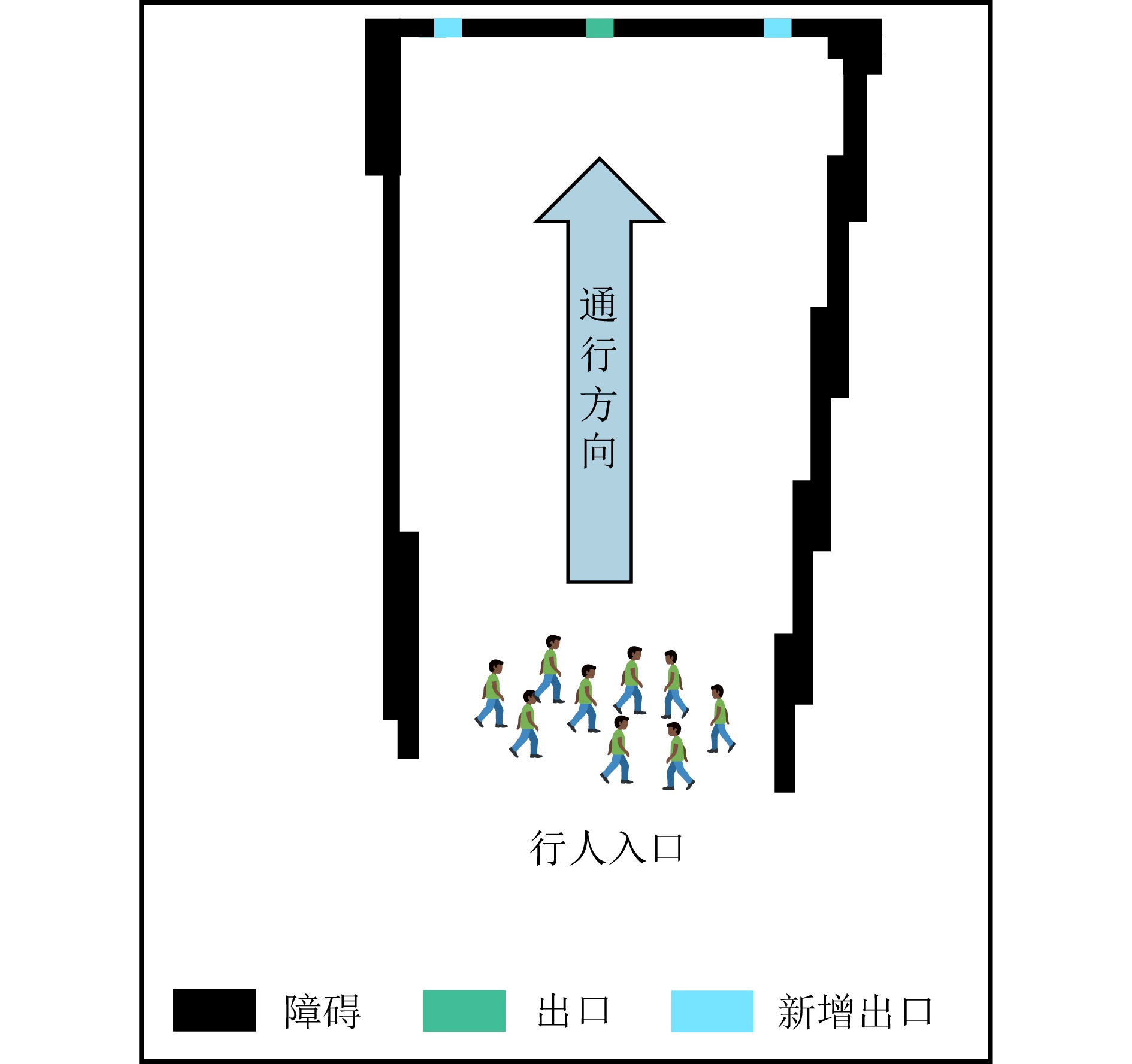
图 16 单向通道人群流动场景示意
Fig. 16 Illustration of a unidirectional passage crowd flow scenario
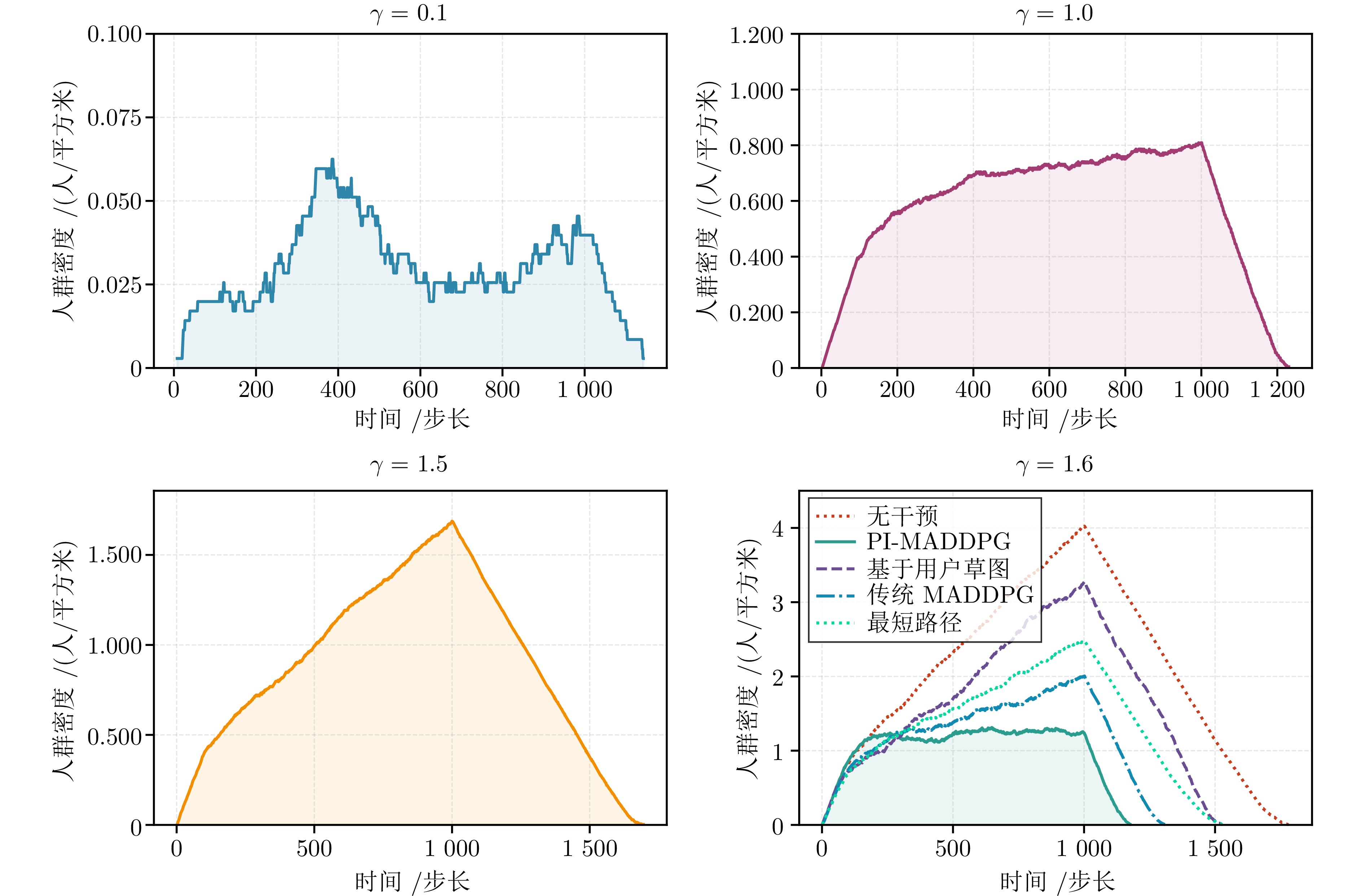
图 17 疏散过程中通道内人群密度变化曲线
Fig. 17 Crowd density variation curve in the passage during the evacuation process
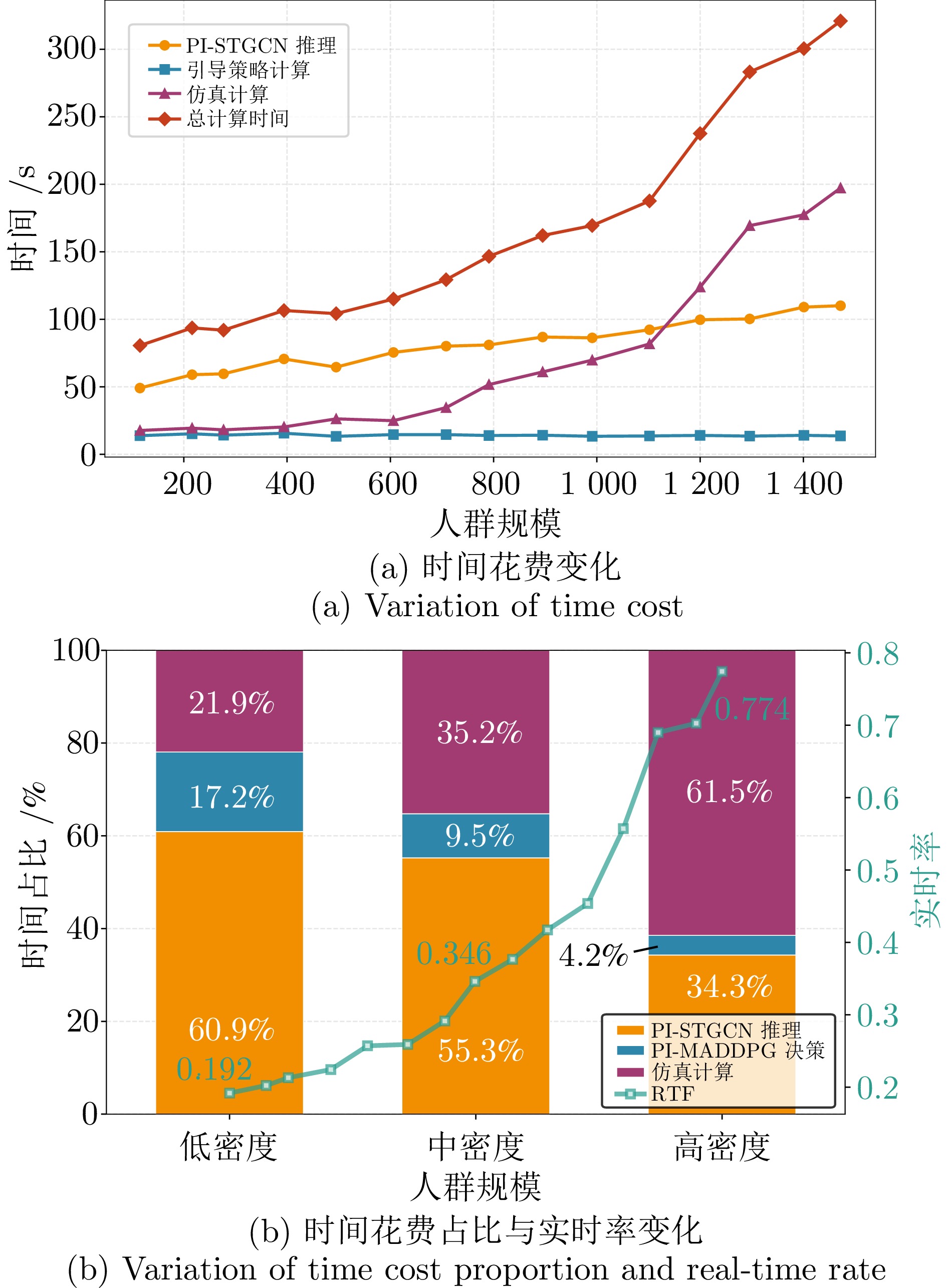
图 18 不同人群规模下的仿真与引导干预计算时间花销
Fig. 18 Computation time cost of simulation and guidance intervention under different crowd scales
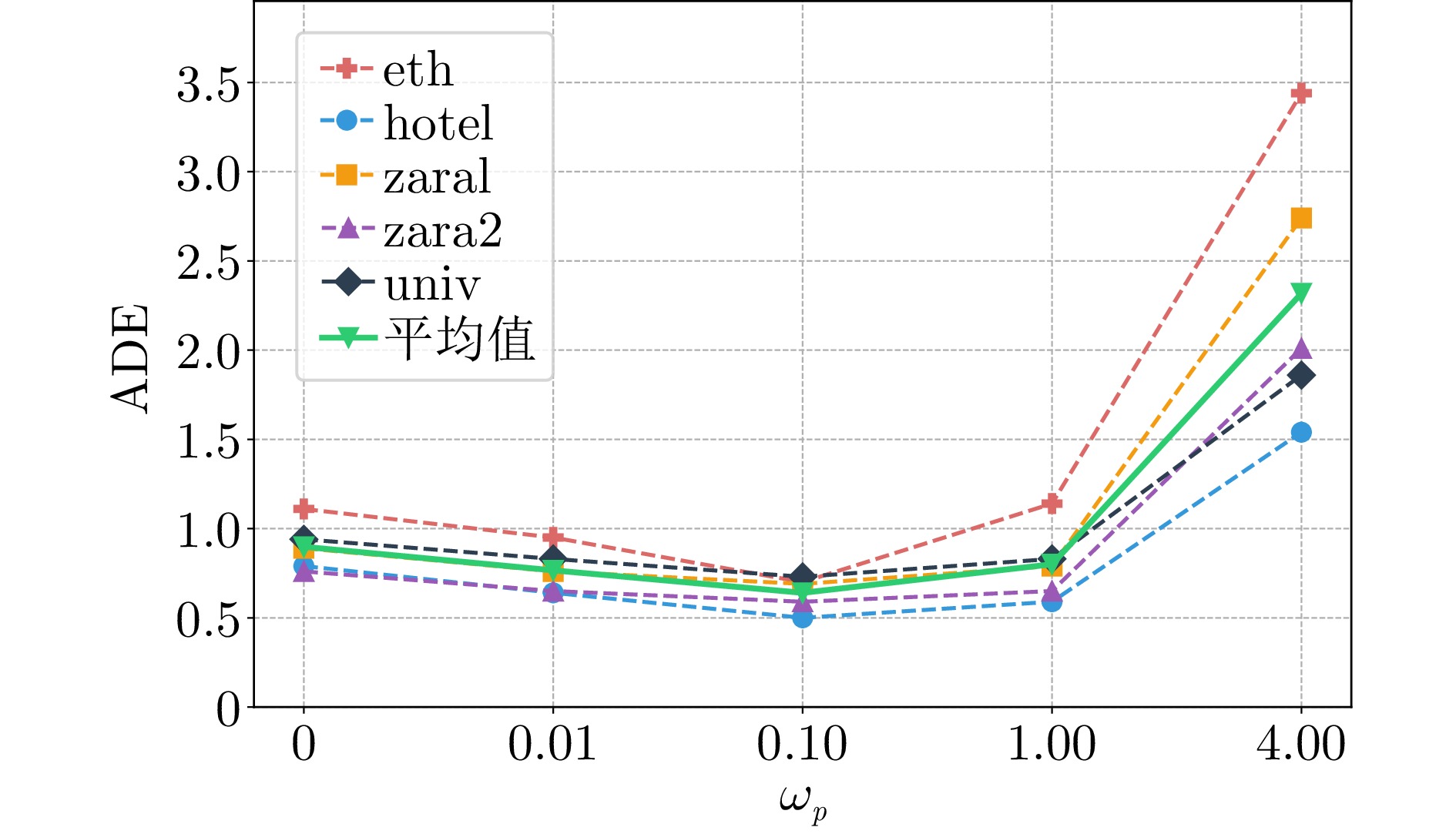
B1 不同$ \omega_{p} $取值下PI-STGCN的ADE性能
B1 ADE performance of PI-STGCN with different $ \omega_{p} $ values
表 1 人群移动仿真实验agent信息
Table 1 Agent information for crowd movement simulation experiments
场景 eth hotel univ zara1 zara2 agent数量 255 112 364 139 185 平均速度(m/s) 1.63 1.01 0.89 1.24 1.19  下载: 导出CSV
下载: 导出CSV
B1 人群移动仿真实验参数
B1 Crowd movement simulation experiment parameters
参数名称 值 $ P\big(t\big) $ 阶次 4 $ \omega_{p} $ 0.10 $ \omega_{c} $ [0.01, 5] $ k_{g_{i}} $ 10 $ \lambda_{o} $ 25 $ \lambda_{h} $ 4 $ \Delta t $ 0.4 s $ T_{d} $ 12
下载: 导出CSV
B2 人群引导干预实验参数
B2 Crowd guidance intervention experiment parameters
参数名称 值 $ l $ 阶次 6 $ \left(\beta_{{}_{obs}},\;\beta_{{}_{ped}}\right) $ $ (5,\;1.2) $ $ {w}_{p} $ 15 $ {w}_{c} $ −5 $ {w}_{d} $ 5 $ {w}_{t} $ −2 $ {w}_{s} $ 25 $ \xi_A $ $ 1 \times 10^{-4} $ $ \xi_C $ $ 1 \times 10^{-3} $ $ \tau $ 0.01
下载: 导出CSV
-
[1] 岳诗瑶. 大型自发聚集类踩踏事故探析——从梨泰院踩踏事故谈起. 城市与减灾, 2023(3): 17−21 doi: 10.3969/j.issn.1671-0495.2023.03.005Yue Shi-Yao. Analysis on stampede accidents of large-scale spon-taneous congregation. City and Disaster Reduction, 2023(3): 17−21 doi: 10.3969/j.issn.1671-0495.2023.03.005 [2] 孙绪彬, 董海荣, 宁滨, 高童欣, 孔庆杰. 基于ACP方法的应急疏散系统研究. 自动化学报, 2014, 40(1): 16−23Sun Xu-Bin, Dong Hai-Rong, Ning Bin, Gao Tong-Xin, Kong Qing-Jie. ACP-based emergency evacuation system. Acta Automatica Sinica, 2014, 40(1): 16−23 [3] Zhang J B, Zhu J, Dang P, Wu J L, Zhou Y X, Li W L, et al. An improved social force model (ISFM)-based crowd evacuation simulation method in virtual reality with a subway fire as a case study. International Journal of Digital Earth, 2023, 16(1): 1186−1204 [4] Dang H T, Gaudou B, Verstaevel N. A literature review of dense crowd simulation. Simulation Modelling Practice and Theory, 2024, 134: Article No. 102955 doi: 10.1016/j.simpat.2024.102955 [5] Echeverri L C, Auberlet J M, Hubert J P. Modeling collision avoidance behavior with zero-speed pedestrians. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(8): 9608−9617 doi: 10.1109/TITS.2024.3376077 [6] Subaih R, Tordeux A. Modeling pedestrian single-file movement: Extending the interaction to the follower. Physica A: Statistical Mechanics and Its Applications, 2024, 633: Article No. 129394 doi: 10.1016/j.physa.2023.129394 [7] Blue V J, Embrecht M J, Adler J L. Cellular automata modeling of pedestrian movements. In: Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics. Orlando, USA: IEEE, 1997. 2320−2323 [8] Bazior G, Wąs J, Pałka D. Pedestrian dynamics model for high densities. Expert Systems With Applications, 2025, 272: Article No. 126775 doi: 10.1016/j.eswa.2025.126775 [9] Helbing D, Molnár P. Social force model for pedestrian dynamics. Physical Review E, 1995, 51(5): 4282−4286 doi: 10.1103/PhysRevE.51.4282 [10] Zhao R Y, Wei B Y, Han C F, Jia P, Zhu W J, Li C L, et al. Improved crowd dynamics analysis considering physical contact force and panic emotional propagation. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(2): 1840−1851 doi: 10.1109/TITS.2024.3512501 [11] Chenney S. Flow tiles. In: Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation. Grenoble, France: ACM, 2004. 233−242 [12] Zhu L J, Xu X M, Wang J, Chen J H, Ma Z J, Wang Q, et al. An enhanced multi-attribute crowd evacuation model incorporating the effects of environmental impact factors. Heliyon, 2024, 10(4): Article No. e26299 doi: 10.1016/j.heliyon.2024.e26299 [13] 杜泉成, 王晓, 李灵犀, 宁焕生. 行人轨迹预测方法关键问题研究: 现状及展望. 智能科学与技术学报, 2023, 5(2): 143−162Du Quan-Cheng, Wang Xiao, Li Ling-Xi, Ning Huan-Sheng. Key problems and progress of pedestrian trajectory prediction methods: The state of the art and prospects. Chinese Journal of Intelligent Science and Technology, 2023, 5(2): 143−162 [14] Alahi A, Goel K, Ramanathan V, Robicquet A, Fei-Fei L, Savarese S. Social LSTM: Human trajectory prediction in crowded spaces. In: Proceedings of the 39th IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016. 961−971Alahi A, Goel K, Ramanathan V, Robicquet A, Fei-Fei L, Savarese S. Social LSTM: Human trajectory prediction in crowded spaces. In: Proceedings of the 39th IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, USA: IEEE, 2016. 961−971 [15] Gupta A, Johnson J, Fei-Fei L, Savarese S, Alahi A. Social GAN: Socially acceptable trajectories with generative adversarial networks. In: Proceedings of the 41st IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 2255−2264Gupta A, Johnson J, Fei-Fei L, Savarese S, Alahi A. Social GAN: Socially acceptable trajectories with generative adversarial networks. In: Proceedings of the 41st IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 2255−2264 [16] Yan D P, Ding G Y, Huang K X, Huang T Y. Generating natural pedestrian crowds by learning real crowd trajectories through a Transformer-based GAN. The Visual Computer, 2025, 41(2): 1079−1096 doi: 10.1007/s00371-024-03385-4 [17] Mohamed A, Qian K, Elhoseiny M, Claudel C. Social-STGCNN: A social spatio-temporal graph convolutional neural network for human trajectory prediction. In: Proceedings of the 43rd IEEE Conference on Computer Vision and Pattern Recognition. Seattle, USA: IEEE, 2020. 14424−14432 [18] Huang Y F, Bi H K, Li Z X, Mao T L, Wang Z Q. STGAT: Modeling spatial-temporal interactions for human trajectory prediction. In: Proceedings of the 17th IEEE International Conference on Computer Vision. Seoul, Korea: IEEE, 2019. 6272−6281 [19] Chen W X, Sang H F, Wang J Y, Zhao Z S. WTGCN: Wavelet transform graph convolution network for pedestrian trajectory prediction. International Journal of Machine Learning and Cybernetics, 2024, 15(12): 5531−5548 doi: 10.1007/s13042-024-02258-5 [20] Yu C J, Ma X, Ren J W, Zhao H Y, Yi S. Spatio-temporal graph Transformer networks for pedestrian trajectory prediction. In: Proceedings of the 16th European Conference on Computer Vision. Glasgow, UK: Springer, 2020. 507−523 [21] Shi L S, Wang L, Zhou S P, Hua G. Trajectory unified Transformer for pedestrian trajectory prediction. In: Proceedings of the 19th IEEE International Conference on Computer Vision. Paris, France: IEEE, 2023. 9675−9684 [22] Gu T P, Chen G Y, Li J L, Lin C Z, Rao Y M, Zhou J, et al. Stochastic trajectory prediction via motion indeterminacy diffusion. In: Proceedings of the 45th IEEE Conference on Computer Vision and Pattern Recognition. New Orleans, USA: IEEE, 2022. 17113−17122 [23] Wang K L, Tsao L W, Wu J C, Shuai H H, Cheng W H. Traj-Fine: Predicted trajectory refinement for pedestrian trajectory forecasting. In: Proceedings of the 47th IEEE Conference on Computer Vision and Pattern Recognition Workshops. Seattle, USA: IEEE, 2024. 4483−4492 [24] Zhang C Y, Bengio S, Hardt M, Recht B, Vinyals O. Understanding deep learning (still) requires rethinking generalization. Communications of the ACM, 2021, 64(3): 107−115 doi: 10.1145/3446776 [25] Zhang G Z, Yu Z H, Jin D P, Li Y. Physics-infused machine learning for crowd simulation. In: Proceedings of the 28th ACM SIGKDD Conference on Knowledge Discovery and Data Mining. Washington, USA: ACM, 2022. 2439−2449 [26] 倪凌佳, 黄晓霞, 李红旮, 张子博. 基于协作式深度强化学习的火灾应急疏散仿真研究. 系统仿真学报, 2022, 34(6): 1353−1366 doi: 10.16182/j.issn1004731x.joss.21-0108Ni Ling-Jia, Huang Xiao-Xia, Li Hong-Ga, Zhang Zi-Bo. Research on fire emergency evacuation simulation based on cooperative deep reinforcement learning. Journal of System Simulation, 2022, 34(6): 1353−1366 doi: 10.16182/j.issn1004731x.joss.21-0108 [27] Zhang K, Zhu D D, Xu Q H, Zhou H, Peng X M. APF-DQN: Adaptive objective pathfinding via improved deep reinforcement learning among building fire hazard. In: Proceedings of the 33rd International Conference on Artificial Neural Networks Artificial Neural Networks and Machine Learning. Lugano, Swit-zerland: Springer, 2024. 265−279 [28] Li X J, Liu H, Li J Q, Li Y. Deep deterministic policy gradient algorithm for crowd-evacuation path planning. Computers & Industrial Engineering, 2021, 161: Article No. 107621 [29] Wang H Y, Liu H, Li W H. Crowd evacuation path planning and simulation method based on deep reinforcement learning and repulsive force field. Applied Intelligence, 2025, 55(4): Article No. 297 doi: 10.1007/s10489-024-06074-w [30] 杨静, 王晓, 王雨桐, 刘忠民, 李小双, 王飞跃. 平行智能与CPSS: 三十年发展的回顾与展望. 自动化学报, 2023, 49(3): 614−634Yang Jing, Wang Xiao, Wang Yu-Tong, Liu Zhong-Min, Li Xiao-Shuang, Wang Fei-Yue. Parallel intelligence and CPSS in 30 years: An ACP approach. Acta Automatica Sinica, 2023, 49(3): 614−634 [31] 王飞跃. 关于复杂系统研究的计算理论与方法. 中国基础科学, 2004, 6(5): 3−10 doi: 10.3969/j.issn.1009-2412.2004.05.001Wang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 6(5): 3−10 doi: 10.3969/j.issn.1009-2412.2004.05.001 [32] Zhao Y, Zhu Z Q, Chen B, Qiu S H, Huang J C, Lu X, et al. Toward parallel intelligence: An interdisciplinary solution for complex systems. The Innovation, 2023, 4(6): Article No. 100521 doi: 10.1016/j.xinn.2023.100521 [33] Korbmacher R, Tordeux A. Review of pedestrian trajectory prediction methods: Comparing deep learning and knowledge-based approaches. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24126−24144 doi: 10.1109/TITS.2022.3205676 [34] Colas A, van Toll W, Zibrek K, Hoyet L, Olivier A H, Pettré J. Interaction fields: Intuitive sketch-based steering behaviors for crowd simulation. Computer Graphics Forum, 2022, 41(2): 521−534 doi: 10.1111/cgf.14491 [35] Macal C M, North M J. Agent-based modeling and simulation. In: Proceedings of the Winter Simulation Conference. Austin, USA: IEEE, 2009. 86−98 [36] Hewitt C, Inman J. DAI betwixt and between: From ‘intelligent agents’ to open systems science. IEEE Transactions on Systems, Man, and Cybernetics, 1991, 21(6): 1409−1419 doi: 10.1109/21.135685 [37] Karniadakis G E, Kevrekidis I G, Lu L, Perdikaris P, Wang S F, Yang L. Physics-informed machine learning. Nature Reviews Physics, 2021, 3(6): 422−440 doi: 10.1038/s42254-021-00314-5 [38] Zhang D K, Guo L, Karniadakis G E. Learning in modal space: Solving time-dependent stochastic PDEs using physics-informed neural networks. SIAM Journal on Scientific Computing, 2020, 42(2): A639−A665 doi: 10.1137/19M1260141 [39] 刘延飞, 李超, 王忠, 王杰铃. 多智能体深度强化学习及可扩展性研究进展. 计算机工程与应用, 2025, 61(4): 1−24Liu Yan-Fei, Li Chao, Wang Zhong, Wang Jie-Ling. Research progress on multi-agent deep reinforcement learning and scalability. Computer Engineering and Applications, 2025, 61(4): 1−24 [40] 罗彪, 胡天萌, 周育豪, 黄廷文, 阳春华, 桂卫华. 多智能体强化学习控制与决策研究综述. 自动化学报, 2025, 51(3): 510−539 doi: 10.16383/j.aas.c240392Luo Biao, Hu Tian-Meng, Zhou Yu-Hao, Huang Ting-Wen, Yang Chun-Hua, Gui Wei-Hua. Survey on multi-agent reinforcement learning for control and decision-making. Acta Automatica Sinica, 2025, 51(3): 510−539 doi: 10.16383/j.aas.c240392 [41] Lowe R, Wu Y, Tamar A, Harb J, Abbeel P, Mordatch I. Multi-agent actor-critic for mixed cooperative-competitive environments. In: Proceedings of the 31st International Conference on Neural Information Processing System. Long Beach, USA: Curran Associates Inc., 2017. 6382−6393 [42] 李艺春, 刘泽娇, 洪艺天, 王继超, 王健瑞, 李毅, 等. 基于多智能体强化学习的博弈综述. 自动化学报, 2025, 51(3): 540−558 doi: 10.16383/j.aas.c240478Li Yi-Chun, Liu Ze-Jiao, Hong Yi-Tian, Wang Ji-Chao, Wang Jian-Rui, Li Yi, et al. Multi-agent reinforcement learning based game: A survey. Acta Automatica Sinica, 2025, 51(3): 540−558 doi: 10.16383/j.aas.c240478 [43] Jiang B, Zhang Z Y, Lin D D, Tang J, Luo B. Semi-supervised learning with graph learning-convolutional networks. In: Proceedings of the 42nd IEEE Conference on Computer Vision and Pattern Recognition. Long Beach, USA: IEEE, 2019. 11313−11320 [44] Pellegrini S, Ess A, Schindler K, van Gool L. You'll never walk alone: Modeling social behavior for multi-target tracking. In: Proceedings of the 12th International Conference on Computer Vision. Kyoto, Japan: IEEE, 2009. 261−268 [45] Lerner A, Chrysanthou Y, Lischinski D. Crowds by example. Computer Graphics Forum, 2007, 26(3): 655−664 doi: 10.1111/j.1467-8659.2007.01089.x [46] Bönsch A, Barton S J, Ehret J, Kuhlen T W. Immersive sketching to author crowd movements in real-time. In: Proceedings of the 20th ACM International Conference on Intelligent Virtual Agents. Scotland, UK: ACM, 2020. Article No. 11 -

 下载:
下载:

计量
- 文章访问数: 721
- HTML全文浏览量: 614
- PDF下载量: 161
- 被引次数: 0
