

Integrated Framework for Cooperative Mutual Estimation and Control in Multi-agent Systems
-
摘要: 尽管多智能体系统协同控制已有广泛研究, 现有分布式控制算法在个体传感器受损情况下仍存在性能下降问题. 提出一种协同互估计与控制一体化设计新框架, 通过充分利用个体传感器对其他智能体的测量信息, 提升多智能体系统协同控制的弹性能力. 首先, 对整个多智能体系统构建分布式传感网络模型. 其次, 基于既定的协同控制任务, 建立个体对整体控制输入的预测估计; 进一步设计全局整体测量输出的分布式一致性追踪估计器. 然后, 利用整体控制输入预测和整体测量输出追踪, 设计局部观测器实现整体状态估计. 此外, 将所提的一体化设计框架应用于线性多智能体系统协同一致性控制问题, 提出反馈增益的联合设计方法, 从理论上验证了所提框架的有效性. 仿真结果进一步表明, 该框架能够适用于多智能体系统部分传感器受损情形下的协同控制任务. 最后, 探讨协同互估计与控制一体化框架的未来研究方向.Abstract: Although cooperative control of multi-agent systems has been extensively studied, existing distributed control algorithms still suffer the problem of performance degradation when individual sensor failure occurs. This paper proposes a novel integrated design framework for cooperative mutual estimation and control, which enhances the resilience of multi-agent system cooperative control by fully leveraging the measurement information of other agents from individual sensors. Firstly, a distributed sensing network model is constructed for the overall multi-agent systems. Secondly, based on the predefined cooperative control task, each individual establishes a predictive estimate of the global control input; A distributed consensus-based tracking estimator is further designed for reconstructing the global measurement output. Then, a local observer is designed to estimate the overall state using both the global control input prediction and the global measurement output tracking. Furthermore, the proposed integrated design framework is applied to the cooperative consensus control problem of linear multi-agent systems, and a joint design method for the feedback gains is introduced. Theoretical analysis verifies the effectiveness of the proposed framework. Simulation results further demonstrate that the framework is capable of performing cooperative control tasks of multi-agent systems even in the presence of partial sensor failure. Finally, potential directions for future research on integrated framework of cooperative mutual estimation and control are discussed.
-
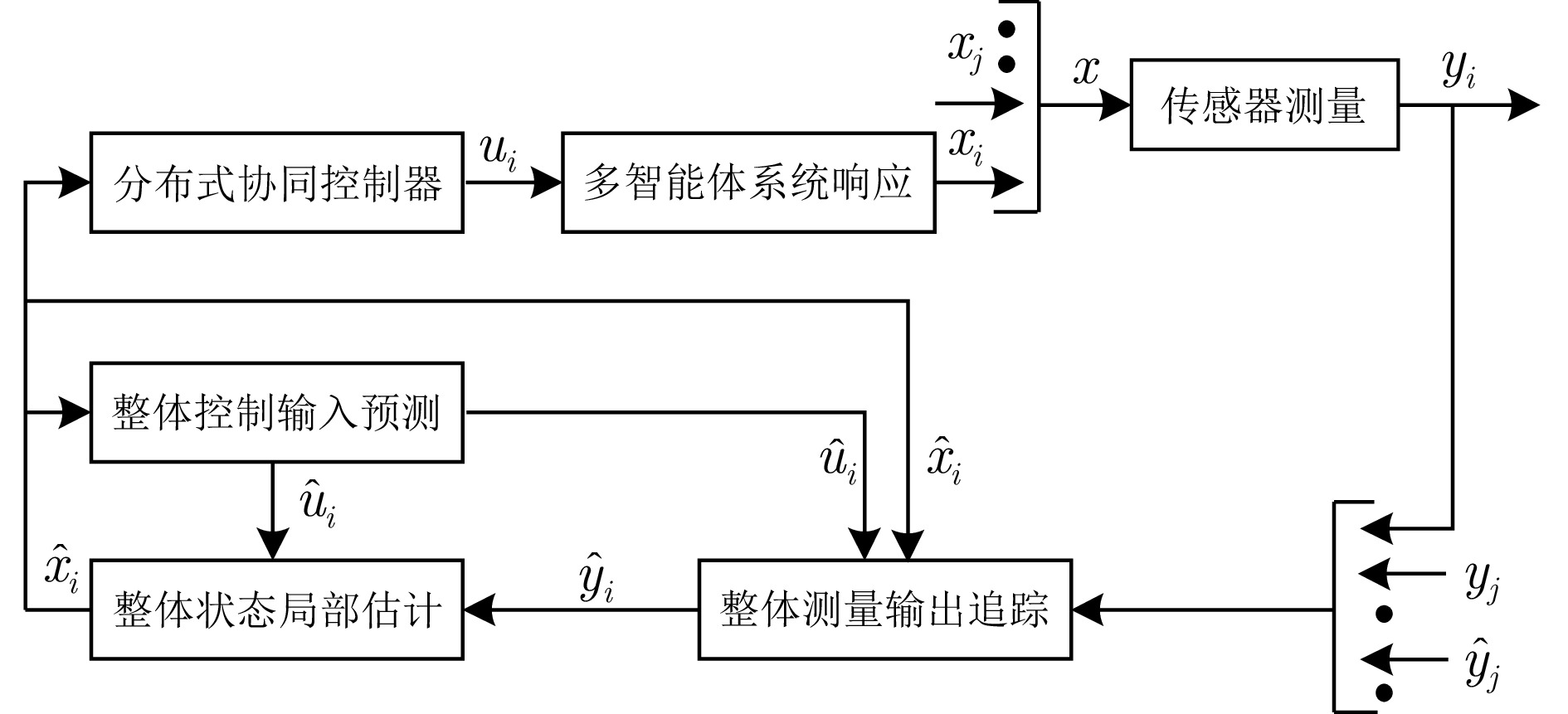
图 1 输入预测–输出追踪的分布式互估计与控制 一体化框架
Fig. 1 Integrated framework of distributed mutual estimation and control with input prediction-output tracking
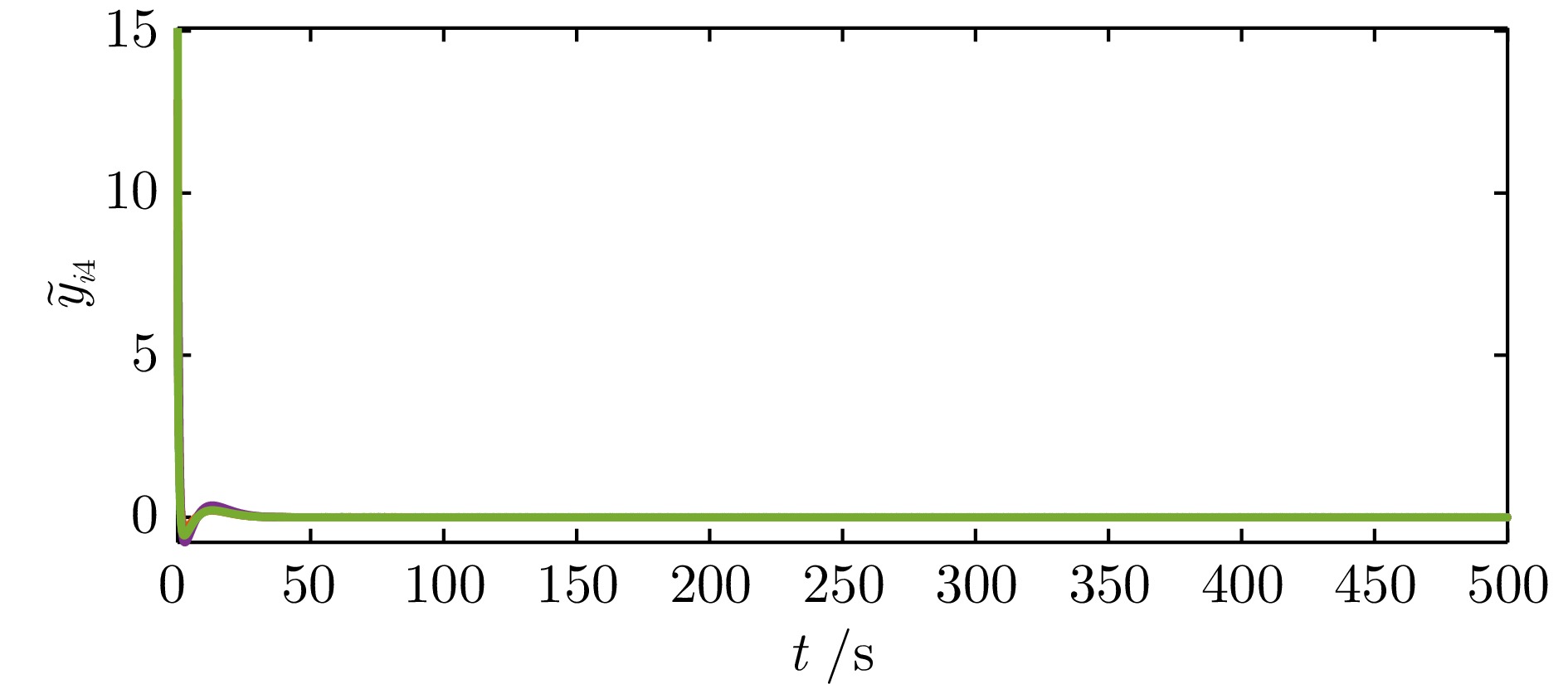
图 3 多智能体系统输出追踪误差$\tilde{y}_{i4}$收敛
Fig. 3 Convergence of the output tracking error$\tilde{y}_{i4}$in multi-agent systems
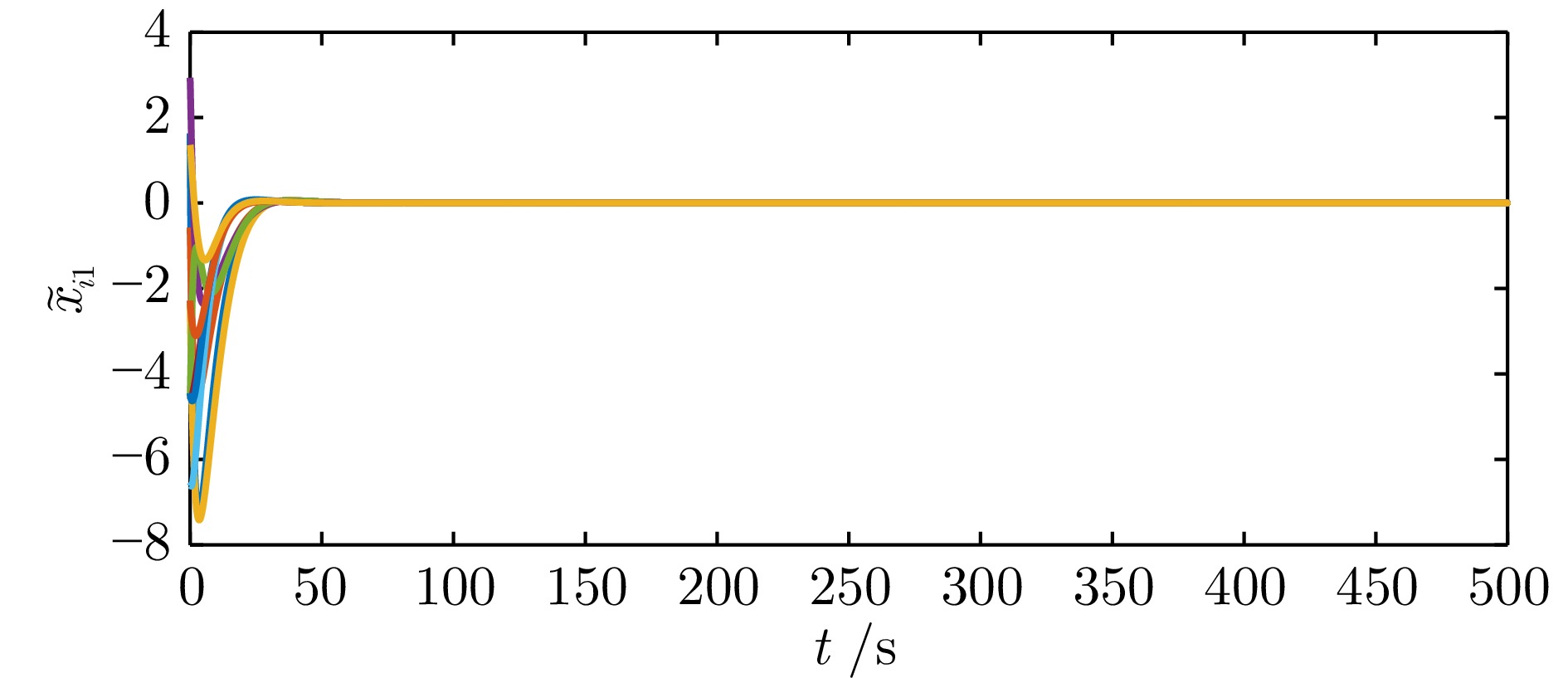
图 4 多智能体系统状态估计误差$\tilde{x}_{i1}$收敛
Fig. 4 Convergence of the state estimation error$\tilde{x}_{i1}$in multi-agent systems
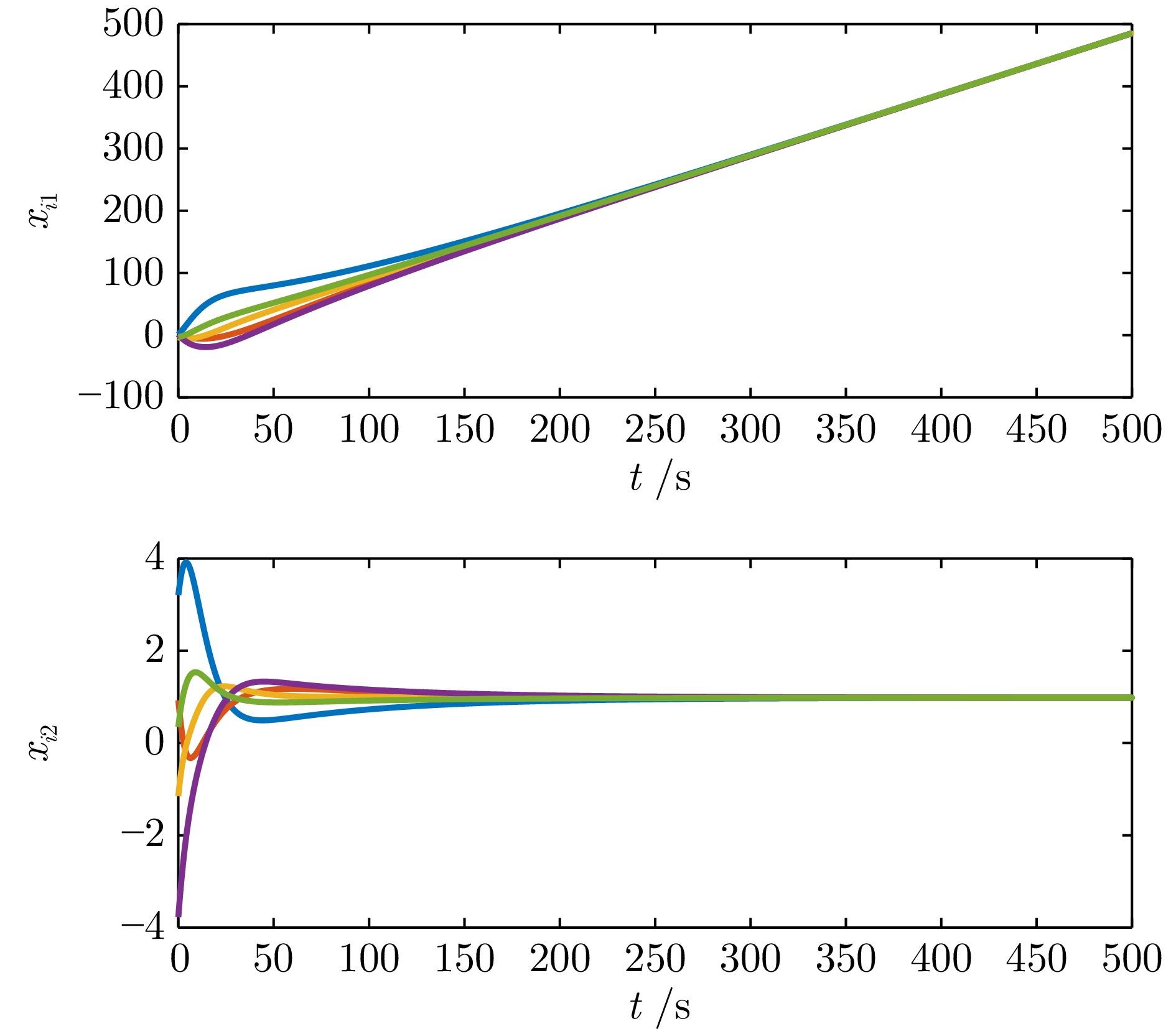
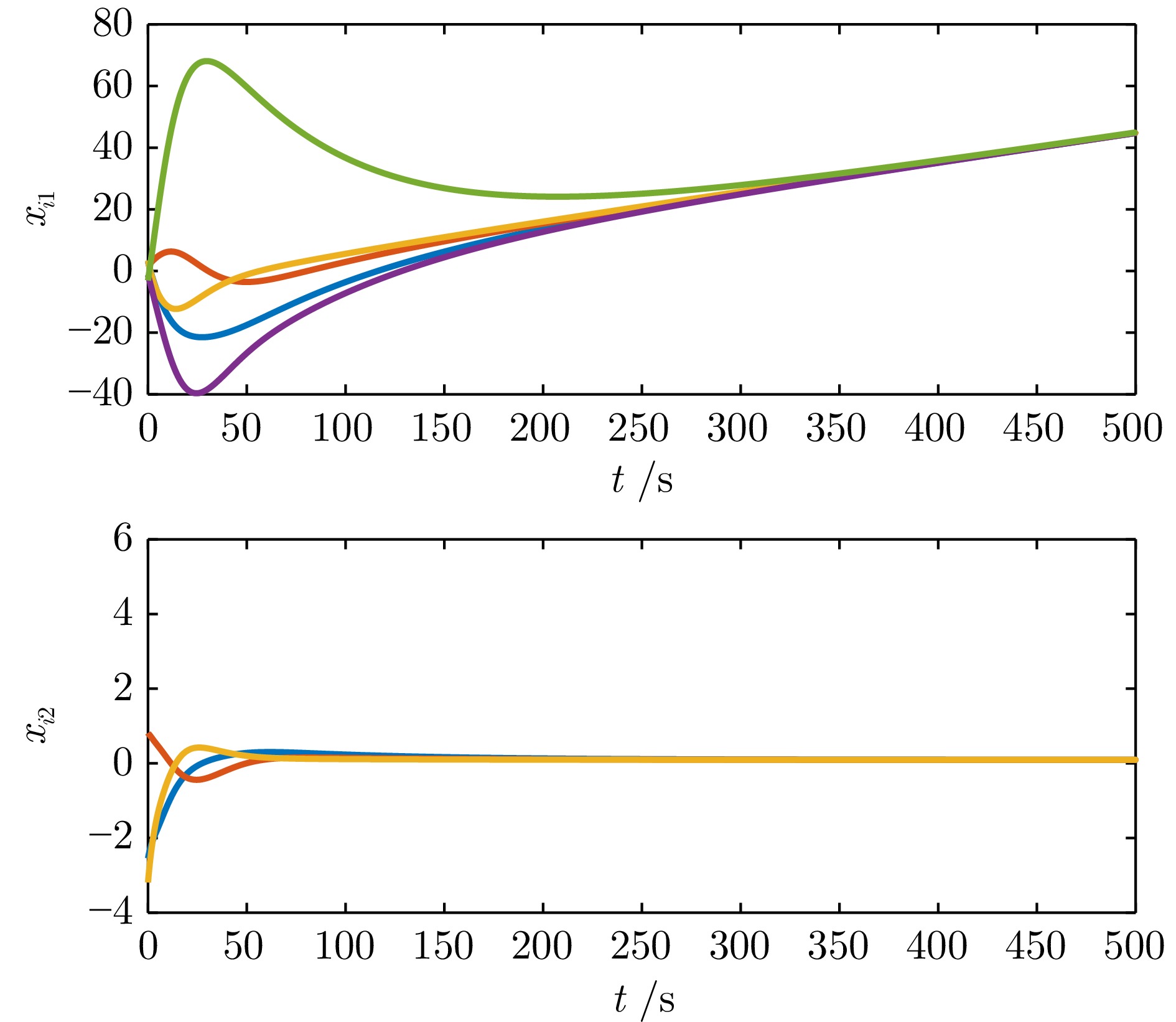
图 5 多智能体系统状态分量$x_{i1}$和$x_{i2}$的轨迹趋于一致
Fig. 5 Trajectories of the state components${x}_{i1}$and${x}_{i2}$in multi-agent systems converge to consensus
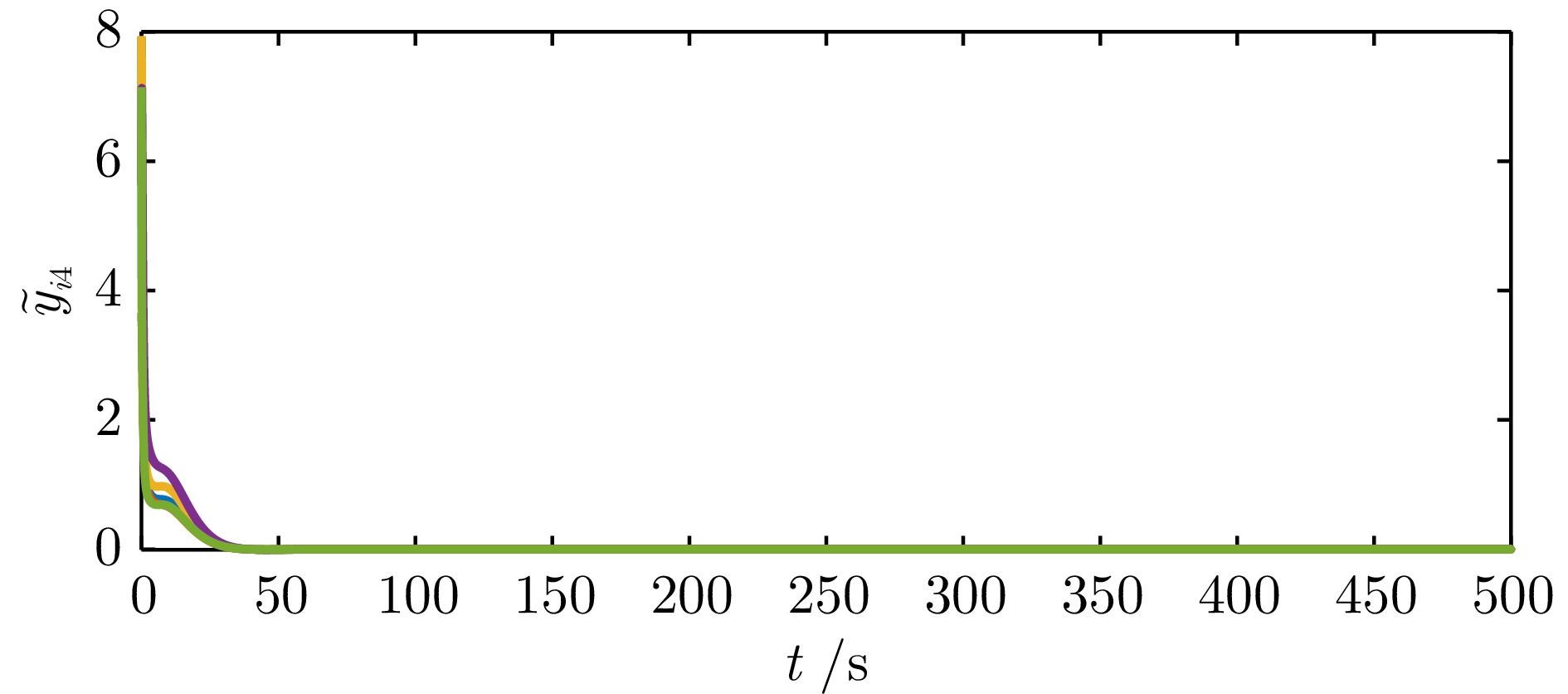
图 6 智能体5传感器失效情形下多智能体系统输出追踪误差$\tilde{y}_{i4}$收敛
Fig. 6 Convergence of the output tracking error$\tilde{y}_{i4}$in multi-agent systems under sensor failure of agent 5
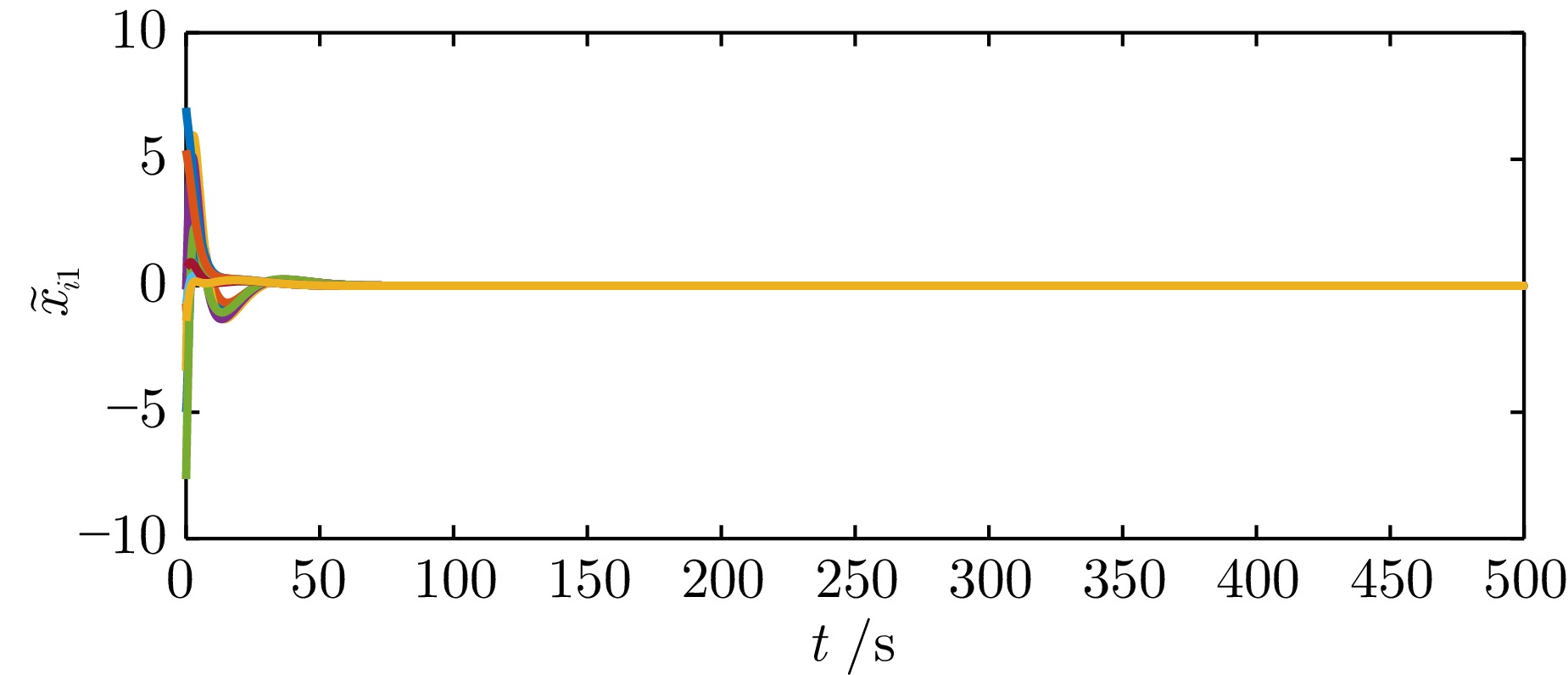
图 7 智能体5传感器失效情形下多智能体系统状态估计误差$\tilde{x}_{i1}$收敛
Fig. 7 Convergence of the state estimation error$\tilde{x}_{i1}$in multi-agent systems under sensor failure of agent 5
-
[1] 孙健, 邓方, 陈杰. 陆用运动体控制系统发展现状与趋势. 自动化学报, 2018, 44(11): 1985−1999Sun Jian, Deng Fang, Chen Jie. Control system of ground-based moving platforms: State of the art and future trends. Acta Automatica Sinica, 2018, 44(11): 1985−1999 [2] 罗彪, 胡天萌, 周育豪, 黄廷文, 阳春华, 桂卫华. 多智能体强化学习控制与决策研究综述. 自动化学报, 2025, 51(3): 510−539Luo Biao, Hu Tian-Meng, Zhou Yu-Hao, Huang Ting-Wen, Yang Chun-Hua, Gui Wei-Hua. Survey on multi-agent reinforcement learning for control and decision-making. Acta Automatica Sinica, 2025, 51(3): 510−539 [3] Dorigo M, Theraulaz G, Trianni V. Swarm robotics: Past, present, and future. Proceedings of the IEEE, 2021, 109(7): 1152−1165 doi: 10.1109/JPROC.2021.3072740 [4] Olfati-Saber R, Murray R M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control, 2004, 49(9): 1520−1533 doi: 10.1109/TAC.2004.834113 [5] Ren W, Beard R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5): 655−661 doi: 10.1109/TAC.2005.846556 [6] Ren W, Sorensen N. Distributed coordination architecture for multi-robot formation control. Robotics and Autonomous Systems, 2008, 56(4): 324−333 doi: 10.1016/j.robot.2007.08.005 [7] Chung S J, Ahsun U, Slotine J J E. Application of synchronization to formation flying spacecraft: Lagrangian approach. Journal of Guidance, Control and Dynamics, 2009, 32(2): 512−526 doi: 10.2514/1.37261 [8] Olfati-Saber R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Transactions on Automatic Control, 2006, 51(3): 401−420 doi: 10.1109/TAC.2005.864190 [9] Zhang H T, Zhai C, Chen Z Y. A general alignment repulsion algorithm for flocking of multi-agent systems. IEEE Transactions on Automatic Control, 2011, 56(2): 430−435 doi: 10.1109/TAC.2010.2089652 [10] Li W, Cassandras C G. Distributed cooperative coverage control of sensor networks. In: Proceedings of the 44th IEEE Conference on Decision and Control. Seville, Spain: IEEE, 2005. 2542−2547 [11] Ren W. On consensus algorithms for double-integrator dynamics. IEEE Transactions on Automatic Control, 2008, 53(6): 1503−1509 doi: 10.1109/TAC.2008.924961 [12] Seo J H, Shim H, Back J. Consensus of high-order linear systems using dynamic output feedback compensator: Low gain approach. Automatica, 2009, 45(11): 2659−2664 doi: 10.1016/j.automatica.2009.07.022 [13] Li Z K, Duan Z S, Chen G R, Huang L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Transactions on Circuits and Systems I: Regular Papers, 2010, 57(1): 213−224 doi: 10.1109/TCSI.2009.2023937 [14] Wen G H, Zhao Y, Duan Z S, Yu W W, Chen G R. Containment of higher-order multi-leader multi-agent systems: A dynamic output approach. IEEE Transactions on Automatic Control, 2016, 61(4): 1135−1140 doi: 10.1109/TAC.2015.2465071 [15] Movric K H, Lewis F L. Cooperative optimal control for multi-agent systems on directed graph topologies. IEEE Transactions on Automatic Control, 2014, 59(3): 769−774 doi: 10.1109/TAC.2013.2275670 [16] Sarlette A, Sepulchre R, Leonard N E. Autonomous rigid body attitude synchronization. Automatica, 2009, 45(2): 572−577 doi: 10.1016/j.automatica.2008.09.020 [17] Mei J, Ren W, Ma G F. Distributed coordinated tracking with a dynamic leader for multiple Euler-Lagrange systems. IEEE Transactions on Automatic Control, 2011, 56(6): 1415−1421 doi: 10.1109/TAC.2011.2109437 [18] Ding Z T. Consensus control of a class of Lipschitz nonlinear systems. International Journal of Control, 2014, 87(11): 2372−2382 [19] Zhang F, Trentelman H L, Scherpen J M A. Fully distributed robust synchronization of networked Lur'e systems with incremental nonlinearities. Automatica, 2014, 50(10): 2515−2526 doi: 10.1016/j.automatica.2014.08.033 [20] Hu J P, Zheng W X. Adaptive tracking control of leader-follower systems with unknown dynamics and partial measurements. Automatica, 2014, 50(5): 1416−1423 doi: 10.1016/j.automatica.2014.02.037 [21] Ghosh S, Lee J W. Optimal distributed finite-time consensus on unknown undirected graphs. IEEE Transactions on Control of Network Systems, 2015, 2(4): 323−334 doi: 10.1109/TCNS.2015.2426751 [22] Dominguez-Garcia A D, Hadjicostis C N. Distributed matrix scaling and application to average consensus in directed graphs. IEEE Transactions on Automatic Control, 2013, 58(3): 667−681 doi: 10.1109/TAC.2012.2219953 [23] Hadjicostis C N, Charalambous T. Average consensus in the presence of delays in directed graph topologies. IEEE Transactions on Automatic Control, 2014, 59(3): 763−768 doi: 10.1109/TAC.2013.2275669 [24] Saboori I, Khorasani K. ${H_{\infty}}$ consensus achievement of multi-agent systems with directed and switching topology networks. IEEE Transactions on Automatic Control, 2014, 59(11): 3104−3109 doi: 10.1109/TAC.2014.2358071 [25] Psillakis H E. Consensus in networks of agents with unknown high-frequency gain signs and switching topology. IEEE Transactions on Automatic Control, 2017, 62(8): 3993−3998 doi: 10.1109/TAC.2016.2616645 [26] Lv Y Z, Li Z K, Duan Z S, Chen J. Distributed adaptive output feedback consensus protocols for linear systems on directed graphs with a leader of bounded input. Automatica, 2016, 74: 308−314 doi: 10.1016/j.automatica.2016.07.041 [27] Li Z K, Ren W, Liu X D, Xie L H. Distributed consensus of linear multi-agent systems with adaptive dynamic protocols. Automatica, 2013, 49(7): 1986−1995 doi: 10.1016/j.automatica.2013.03.015 [28] Li Z K, Wen G H, Duan Z S, Ren W. Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE Transactions on Automatic Control, 2015, 60(4): 1152−1157 doi: 10.1109/TAC.2014.2350391 [29] Lv Y Z, Li Z K, Duan Z S, Feng G. Novel distributed robust adaptive consensus protocols for linear multi-agent systems with directed graphs and external disturbances. International Journal of Control, 2017, 90(2): 137−147 doi: 10.1080/00207179.2016.1172259 [30] Lv Y Z, Fu J J, Wen G H, Huang T W, Yu X H. On consensus of multiagent systems with input saturation: Fully distributed adaptive antiwindup protocol design approach. IEEE Transactions on Control of Network Systems, 2020, 7(3): 1127−1139 doi: 10.1109/TCNS.2020.2964146 [31] Lv Y Z, Fu J J, Wen G H, Huang T W, Yu X H. Fully distributed anti-windup consensus protocols for linear MASs with input saturation: The case with directed topology. IEEE Transactions on Cybernetics, 2021, 51(5): 2359−2371 doi: 10.1109/TCYB.2020.2977554 [32] Lv Y Z, Fu J J, Wen G H, Huang T W, Yu X H. Distributed adaptive observer-based control for output consensus of heterogeneous MASs with input saturation constraint. IEEE Transactions on Circuits and Systems I: Regular Papers, 2020, 67(3): 995−1007 doi: 10.1109/TCSI.2019.2955163 [33] Cheng B, Li Z K. Fully distributed event-triggered protocols for linear multiagent networks. IEEE Transactions on Automatic Control, 2019, 64(4): 1655−1662 doi: 10.1109/TAC.2018.2857723 [34] Cheng B, Li Z K. Coordinated tracking control with asynchronous edge-based event-triggered communications. IEEE Transactions on Automatic Control, 2019, 64(10): 4321−4328 doi: 10.1109/TAC.2019.2895927 [35] Cheng B, Lv Y Z, Li Z K, Duan Z S. Discrete communication and control updating in adaptive dynamic event-triggered consensus. IEEE Transactions on Automatic Control, 2024, 69(1): 347−354 doi: 10.1109/TAC.2023.3260681 [36] Dimarogonas D V, Frazzoli E, Johansson K H. Distributed event-triggered control for multi-agent systems. IEEE Transactions on Automatic Control, 2012, 57(5): 1291−1297 doi: 10.1109/TAC.2011.2174666 [37] Qian J C, Duan P H, Duan Z S. Fully distributed filtering with a stochastic event-triggered mechanism. IEEE Transactions on Control of Network Systems, 2022, 9(2): 753−762 doi: 10.1109/TCNS.2021.3124257 [38] Yi X L, Liu K, Dimarogonas D V, Johansson K H. Dynamic event-triggered and self-triggered control for multi-agent systems. IEEE Transactions on Automatic Control, 2019, 64(8): 3300−3307 doi: 10.1109/TAC.2018.2874703 [39] de Persis C, Tesi P. Formulas for data-driven control: Stabilization, optimality, and robustness. IEEE Transactions on Automatic Control, 2020, 65(3): 909−924 doi: 10.1109/TAC.2019.2959924 [40] Liu W J, Sun J, Wang G, Bullo F, Chen J. Data-driven resilient predictive control under denial-of-service. IEEE Transactions on Automatic Control, 2023, 68(8): 4722−4737 doi: 10.1109/TAC.2022.3209399 [41] Liu W J, Sun J, Wang G, Bullo F, Chen J. Data-driven self-triggered control via trajectory prediction. IEEE Transactions on Automatic Control, 2023, 68(11): 6951−6958 doi: 10.1109/TAC.2023.3244116 [42] Li Y F, Wang X, Sun J, Wang G, Chen J. Self-triggered consensus control of multiagent systems from data. IEEE Transactions on Automatic Control, 2024, 69(7): 4702−4709 doi: 10.1109/TAC.2024.3351865 [43] Duan P H, Liu T, Xing Y, Johansson K H. Robust data-driven Kalman filtering for unknown linear systems using maximum likelihood optimization. Automatica, 2025, 180: Article No. 112474 doi: 10.1016/j.automatica.2025.112474 [44] Duan P H, Liu T, Lv Y Z, Wen G H. Cooperative control of multichannel linear systems with self-organizing private agents. IEEE Transactions on Control of Network Systems, 2024, 11(4): 1937−1948 doi: 10.1109/TCNS.2024.3371549 [45] Duan P H, Lv Y Z, Wen G H, Ogorzalek M. A framework on fully distributed state estimation and cooperative stabilization of LTI plants. IEEE Transactions on Automatic Control, 2024, 69(10): 6746−6761 doi: 10.1109/TAC.2024.3376791 [46] Rego F C, Pu Y, Alessandretti A, Aguiar A P, Pascoal A M, Jones C N. A distributed Luenberger observer for linear state feedback systems with quantized and rate-limited communications. IEEE Transactions on Automatic Control, 2021, 66(9): 3922−3937 doi: 10.1109/TAC.2020.3027658 [47] Duan P H, Duan Z S, Lv Y Z, Chen G R. Distributed finite-horizon extended Kalman filtering for uncertain nonlinear systems. IEEE Transactions on Cybernetics, 2021, 51(2): 512−520 doi: 10.1109/TCYB.2019.2919919 [48] Slotine J J E, Li W. Applied Nonlinear Control. Englewood Cliffs: Prentice Hall, 1991. [49] Zhou J, Shang J, Chen T W. Cybersecurity landscape on remote state estimation: A comprehensive review. IEEE/CAA Journal of Automatica Sinica, 2014, 11(4): 851−865 [50] Zhao D, Lv Y Z, Yu X H, Wen G H, Chen G R. Resilient consensus of higher order multiagent networks: An attack isolation-based approach. IEEE Transactions on Automatic Control, 2022, 67(2): 1001−1007 doi: 10.1109/TAC.2021.3075327 [51] Zhao D, Lv Y Z, Wen G H, Gao Z W. Resilient consensus of high-order networks against collusive attacks. Automatica, 2023, 151: Article No. 110934 doi: 10.1016/j.automatica.2023.110934 [52] Zhao D, Lv Y Z, Zhou J L, Wen G H, Huang T W. Attack-isolation-based resilient control of large-scale systems against collusive attacks. IEEE Transactions on Network Science and Engineering, 2022, 9(4): 2857−2869 doi: 10.1109/TNSE.2022.3171219 [53] Zhao D, Ho D W C, Wen G H. Generalized graph-dependent isolation of collusive attacks for interconnected systems. IEEE Transactions on Automatic Control, 2025, 70(4): 2274−2288 doi: 10.1109/TAC.2024.3474055 [54] Wen G H, Lv Y Z, Zheng W X, Zhou J L, Fu J J. Joint robustness of time-varying networks and its applications to resilient consensus. IEEE Transactions on Automatic Control, 2023, 68(11): 6466−6480 doi: 10.1109/TAC.2023.3237493 [55] Tang Y Y, Lv Y Z, Zhou J L, Ogorzalek M. Resilient consensus in open multi-agent systems. IEEE Control Systems Letters, 2025, 9: 1261−1266 doi: 10.1109/LCSYS.2025.3580518 [56] Zhou J L, Lv Y Z, Wen G H, Yu X H. Resilient consensus of multiagent systems under malicious attacks: Appointed-time observer-based approach. IEEE Transactions on Cybernetics, 2022, 52(10): 10187−10199 doi: 10.1109/TCYB.2021.3058094 [57] Lv Y Z, Wen G H, Huang T W. Adaptive protocol design for distributed tracking with relative output information: A distributed fixed-time observer approach. IEEE Transactions on Control of Network Systems, 2020, 7(1): 118−128 doi: 10.1109/TCNS.2019.2919855 [58] Lv Y Z, Wen G H, Huang T W, Duan Z S. Adaptive attack-free protocol for consensus tracking with pure relative output information. Automatica, 2020, 117: Article No. 108998 doi: 10.1016/j.automatica.2020.108998 [59] Lv Y Z, Zhou J L, Wen G H, Yu X H, Huang T W. Fully distributed adaptive NN-based consensus protocol for nonlinear MASs: An attack-free approach. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(4): 1561−1570 doi: 10.1109/TNNLS.2020.3042821 -

 下载:
下载:

计量
- 文章访问数: 1825
- HTML全文浏览量: 1071
- PDF下载量: 457
- 被引次数: 0
