

Refined Anti-disturbance Control: From Disturbance Invariance to Adaptive Variability
-
摘要: 抗干扰是控制科学和智能科学的基本主题之一. 长期以来, 干扰不变性被视为抗干扰控制方法的一个设计准则. 然而, 干扰不变性设计带来的控制代价易被忽视, 且往往不满足执行机构和信息拓扑等系统软硬件限制. 本文在干扰不变性准则的基础上, 提出干扰适应可变性准则和设计思想. 主要实现途径包括: 干扰深耦合建模、干扰可抗/可用度量化、复合抗干扰控制、干扰主动和精细利用、基于抗扰能力量化的系统重构优化等. 在此基础上, 进一步提出系统进化设计、进化智能和智能系统工程的思想, 从“任务目标−干扰因素−系统资源”一体化的角度提高动态适配性, 实现闭环系统的行为进化和形态进化. 干扰适应可变性准则突破了传统干扰不变性准则的藩篱, 实现了从“抗干扰”到“识干扰”、“用干扰”的干扰精细控制理论跨越, 为精细抗干扰控制理论和智能系统工程实践提供了新的理论支撑、研究视角和技术途径.Abstract: Anti-disturbance is one of the basic themes of control science and intelligence science. The principle of disturbance invariance has been used as one of the design criteria for anti-disturbance control methods for a long time. However, the control cost caused by the principle of disturbance invariance design is often ignored, and the limitations of system software and hardware, including the constraints of actuator and information topology, are difficult to be satisfied. To this end, this survey proposes the design idea and principle of adaptive variability under disturbance based on the principle of disturbance invariance. The main implementation methods include: Disturbance deeply-coupled modeling, disturbance resistance/availability quantification, composite anti-disturbance control, active and refined disturbance utilization, and anti-disturbance capability quantification based system reconstruction and optimization, etc. On this basis, the ideas of system evolutionary design, evolutionary intelligence, and intelligent system engineering are further proposed. The dynamic adaptability is improved from the integrated perspective of “task goals-disturbance factors-system resources”, and further achieving closed-loop behavioral and morphological evolution. The principle of adaptive variability under disturbance breaks through the barriers of the traditional principle of disturbance invariance. It realizes the theoretical leap of refined anti-disturbance control theory from “anti-disturbance” to “disturbance recognition” and “disturbance utilization”. It provides new theoretical support, research perspectives, and technical approaches for refined anti-disturbance control theory and intelligent system engineering practice.
-
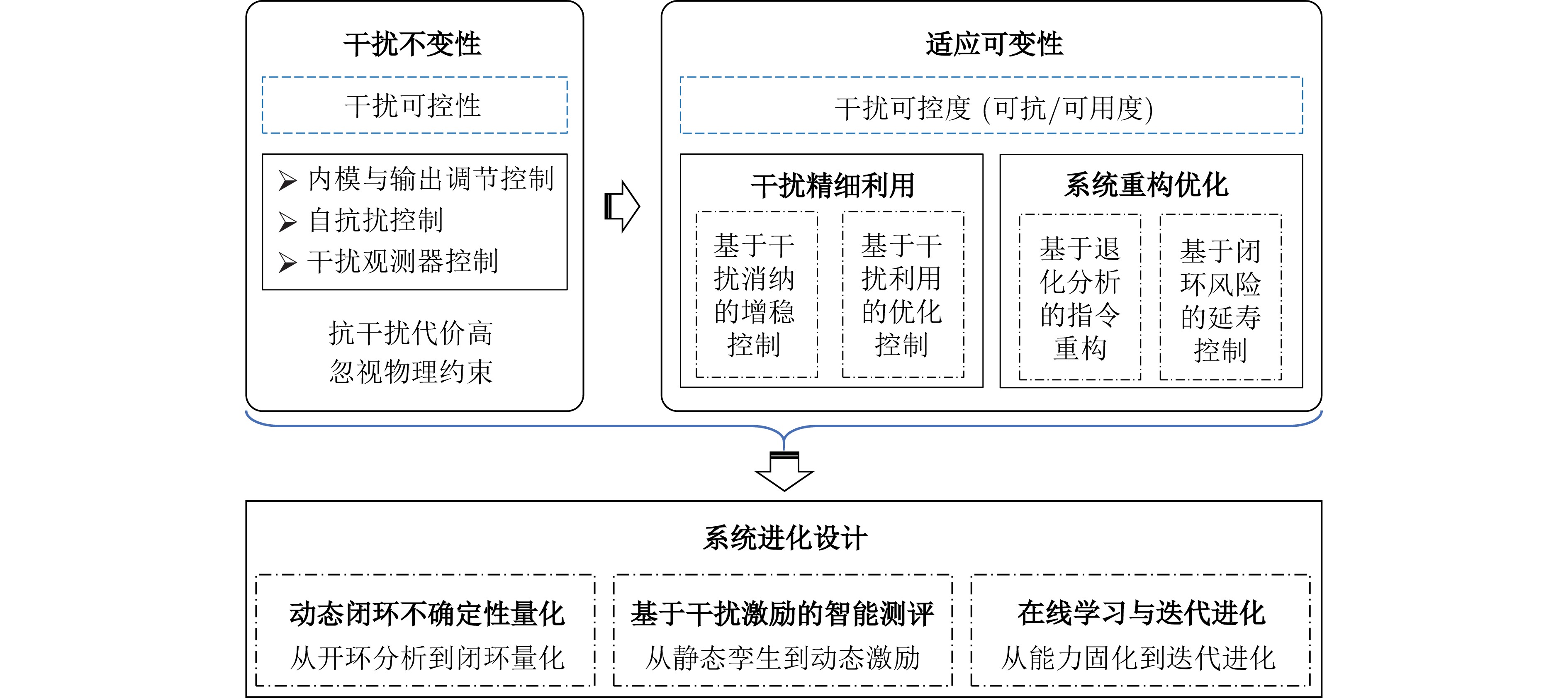
图 1 从干扰不变性到适应可变性与系统进化设计
Fig. 1 From disturbance invariance to adaptive variability and system evolvable design
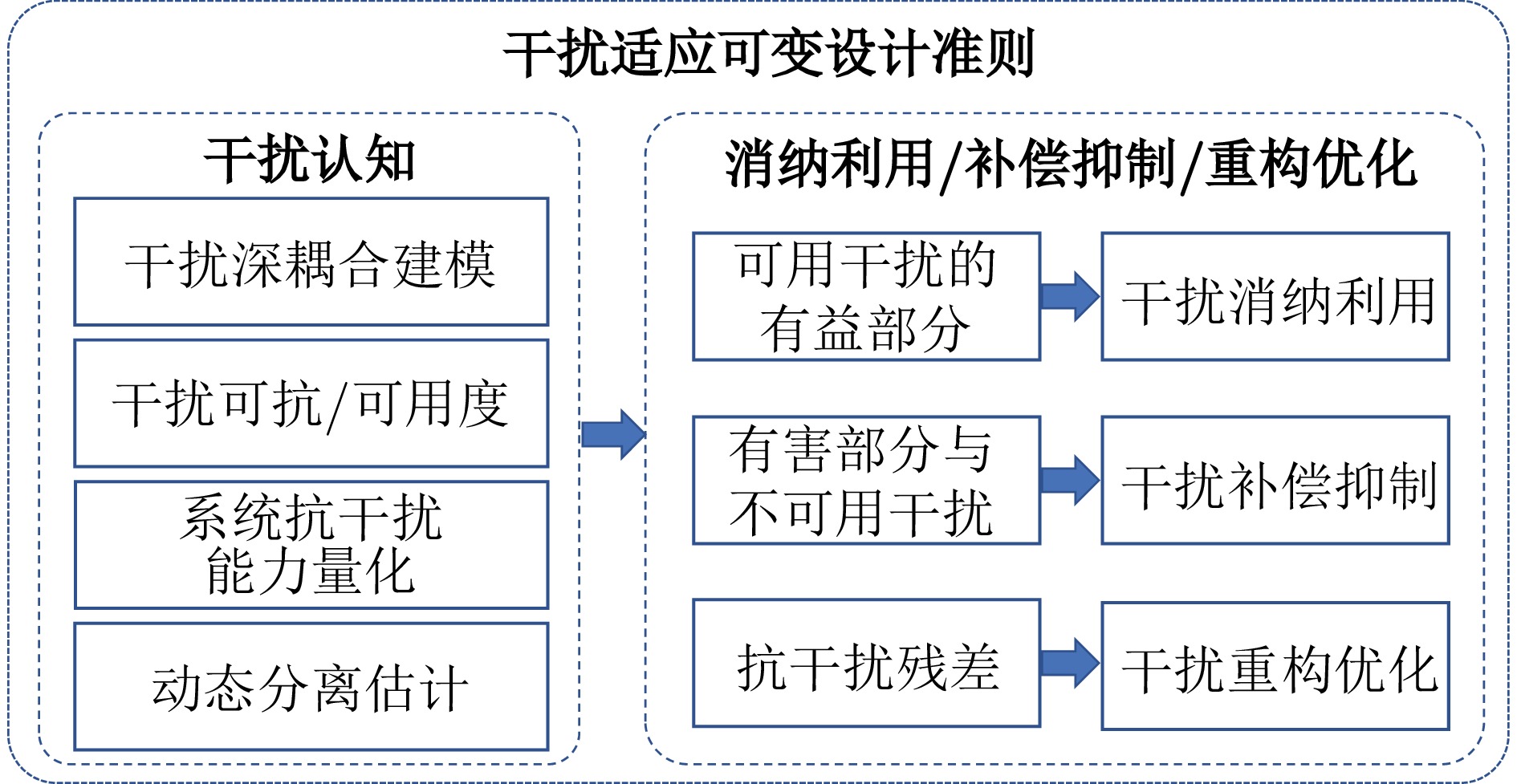
图 2 干扰适应可变性准则的设计框架
Fig. 2 Design framework for the principle of adaptive variability under disturbance
-
[1] Schipanov G. Theory and methods of designing automatic regulators. Automatika in Telemekhanika, 1939, 4(1): 49−66 [2] Luzin N N. Absolute invariance and ${\epsilon} $-invariance in the theory of differential equations. Dokl Akad Nauk SSSR, 1946, 51(4): 251−253 [3] Petrov B N. The invariance principle and the conditions for its application during the calculation of linear and non-linear systems. IFAC Proceedings Volumes, 1960, 1(1): 127−135 doi: 10.1016/S1474-6670(17)70045-6 [4] Kulebakin V S. The theory of invariance of regulating and control systems. IFAC Proceedings Volumes, 1960, 1(1): 116−126 doi: 10.1016/S1474-6670(17)70044-4 [5] 乌兰诺夫 [著], 胡保生 [译]. 扰动调节. 上海: 上海科学技术出版社, 1963.yJaHoB [Author], Hu Bao-Sheng [Translator]. Disturbance Adjusting. Shanghai: Shanghai Scientific & Technical Publishers, 1963. [6] Ashby W R. An Introduction to Cybernetics. New York: Wiley, 1956. [7] Preminger J, Rootenberg J. Some considerations relating to control systems employing the invariance principle. IEEE Transactions on Automatic Control, 1964, 9(3): 209−215 doi: 10.1109/TAC.1964.1105722 [8] Prigogine I, Stengers I. The End of Certainty: Time, Chaos, and the New Laws of Nature. New York: Simon and Schuster, 1997. [9] 冯纯伯. 鲁棒控制系统设计. 南京: 东南大学出版社, 1995.Feng Chun-Bo. Robust Control System Design. Nanjing: Southeast University Press, 1995. [10] 陈翰馥, 郭雷. 现代控制理论的若干进展及展望. 科学通报, 1998, 43(1): 1−7Chen Han-Fu, Guo Lei. Progress and prospects of modern control theory. Chinese Science Bulletin, 1998, 43(1): 1−7 [11] 郭雷, 冯纯伯. 一类具有非线性不确定性系统的鲁棒H∞ 控制. 控制理论与应用, 1999, 16(4): 619−620Guo Lei, Feng Chun-Bo. Robust H∞ control for a class of systems with nonlinear uncertainties. Control Theory and Applications, 1999, 16(4): 619−620 [12] 黄琳, 段志生. 控制科学中的复杂性. 自动化学报, 2003, 29(5): 748−754Huang Lin, Duan Zhi-Sheng. Complexity in control science. Acta Automatica Sinica, 2003, 29(5): 748−754 [13] 郭雷. 不确定性动态系统的估计、控制与博弈. 中国科学: 信息科学, 2020, 50(9): 1327−1344 doi: 10.1360/SSI-2020-0277Guo Lei. Estimation, control, and games of dynamical systems with uncertainty. Scientia Sinica Informationis, 2020, 50(9): 1327−1344 doi: 10.1360/SSI-2020-0277 [14] 郭雷, 李文硕, 崔洋洋, 朱玉凯, 章健淳, 余翔, 等. 动态闭环不确定性量化理论与智能无人系统应用. 中国科学: 技术科学, 2025, 55(1): 1−13 doi: 10.1360/SST-2024-0155Guo Lei, Li Wen-Shuo, Cui Yang-Yang, Zhu Yu-Kai, Zhang Jian-Chun, Yu Xiang, et al. Dynamic closed-loop uncertainty quantification theory with intelligent unmanned systems applications. Scientia Sinica Technologica, 2025, 55(1): 1−13 doi: 10.1360/SST-2024-0155 [15] 郭雷, 朱玉凯, 乔建忠, 郭康, 包为民. 无人系统生存智能与安全、免疫、绿色控制技术. 航空学报, 2022, 43(10): Article No. 527129Guo Lei, Zhu Yu-Kai, Qiao Jian-Zhong, Guo Kang, Bao Wei-Min. Survival intelligence and safety, immunity and green control technologies for unmanned systems. Acta Aeronautica et Astronautica Sinica, 2022, 43(10): Article No. 527129 [16] Tian G, Gao Z Q. From Poncelet's invariance principle to active disturbance rejection. In: Proceedings of the American Control Conference. St. Louis, USA: IEEE, 2009. 2451−2457 [17] Guo L, Cao S Y. Anti-disturbance Control for Systems With Multiple Disturbances. Boca Raton: CRC Press, 2014. [18] Guo L, Cao S Y. Anti-disturbance control theory for systems with multiple disturbances: A survey. ISA Transactions, 2014, 53(4): 846−849 doi: 10.1016/j.isatra.2013.10.005 [19] Chen W H, Yang J, Guo L, Li S H. Disturbance-observer-based control and related methods——An overview. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083−1095 doi: 10.1109/TIE.2015.2478397 [20] 郭雷, 朱玉凯. 多源干扰系统复合自主抗干扰控制技术(中国科研信息化蓝皮书). 北京: 电子工业出版社, 2020. 210−220Guo Lei, Zhu Yu-Kai. Composite Autonomous Anti Disturbance Control for Systems With Multiple Disturbances (Chapter of Chinese E-Science Blue Book 2020). Beijing: Publishing House of Electronics Industry, 2020. 210−220 [21] 温婷, 何奎, 宋薇萍. 科技产业联动2023外滩大会“探路”可持续发展未来. 上海证券报, 2023-09-08 (004)Wen Ting, He Kui, Song Wei-Ping. Technology and industry collaborate at the 2023 inclusion conference on the bund to explore a sustainable future. Shanghai Securities News, 2023-09-08 (004 [22] Jordan M I. Statistical contract theory [Online], available: https://www.emergentmind.com/topics/statistical-contract-theory, August 9, 2025 [23] Bhattacharyyta S P. Disturbance rejection in linear systems. International Journal of Systems Science, 1974, 5(7): 633−637 doi: 10.1080/00207727408920129 [24] Bhattacharyya S. Compensator design based on the invariance principle. IEEE Transactions on Automatic Control, 1975, 20(5): 708−711 doi: 10.1109/TAC.1975.1101044 [25] Guo L, Li W S, Zhu Y K, Yu X, Wang Z D. Composite disturbance filtering: A novel state estimation scheme for systems with multisource, heterogeneous, and isomeric disturbances. IEEE Open Journal of the Industrial Electronics Society, 2023, 4: 387−400 doi: 10.1109/OJIES.2023.3317271 [26] Davison E J, Smith H W. Pole assignment in linear time-invariant multivariable systems with constant disturbances. Automatica, 1971, 7(4): 489−498 doi: 10.1016/0005-1098(71)90099-9 [27] Davison E J. The output control of linear time-invariant multivariable systems with unmeasurable arbitrary disturbances. IEEE Transactions on Automatic Control, 1972, 17(5): 621−630 doi: 10.1109/TAC.1972.1100084 [28] Johnson C. Optimal control of the linear regulator with constant disturbances. IEEE Transactions on Automatic Control, 1968, 13(4): 416−421 doi: 10.1109/TAC.1968.1098947 [29] Johnson C. Accomodation of external disturbances in linear regulator and servomechanism problems. IEEE Transactions on Automatic Control, 1971, 16(6): 635−644 doi: 10.1109/TAC.1971.1099830 [30] Ohishi K, Ohnishi K, Miyachi K. Torque-speed regulation of DC motor based on load torque estimation method. In: Proceedings of the JIEE/International Power Electronics Conference. Tokyo, Japan: JIEE, 1983. 1209−1218 [31] Chen W H, Ballance D J, Gawthrop P J, O'Reilly J. A nonlinear disturbance observer for robotic manipulators. IEEE Transactions on Industrial Electronics, 2000, 47(4): 932−938 doi: 10.1109/41.857974 [32] Han J Q. From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900−906 doi: 10.1109/TIE.2008.2011621 [33] Gao Z Q. Active disturbance rejection control: A paradigm shift in feedback control system design. In: Proceedings of the American Control Conference. Minneapolis, USA: IEEE, 2006. 2399−2405 [34] Guo B Z, Zhao Z L. On convergence of the nonlinear active disturbance rejection control for MIMO systems. SIAM Journal on Control and Optimization, 2013, 51(2): 1727−1757 doi: 10.1137/110856824 [35] Cao M Y, Yang J, Li S H, Madonski R, Xue W C. Cascaded filter PID paradigm for error-based active disturbance rejection control: Equivalence, design, and implementation guidelines. IEEE Transactions on Industrial Electronics, DOI: 10.1109/TIE.2025.3559950 [36] Deng J Q, Xue W C, Zhang L Y, Bao Q L, Mao Y. Disturbance-compression extended state observer with noise insensitivity: Application to electro-optical tracking system. IEEE Transactions on Automation Science and Engineering, 2025, 22: 17761−17777 doi: 10.1109/TASE.2025.3585348 [37] Chen W H, Rhodes C, Liu C J. Dual control for exploitation and exploration (DCEE) in autonomous search. Automatica, 2021, 133: Article No. 109851 doi: 10.1016/j.automatica.2021.109851 [38] Li S H, Yang J, Iwasaki M, Chen W H. Hierarchical disturbance/uncertainty estimation and attenuation for integrated modeling and motion control: Overview and perspectives. IEEE/ASME Transactions on Mechatronics, DOI: 10.1109/TMECH.2024.3515084 [39] Guo L, Chen W H. Disturbance attenuation for a class of nonlinear systems via disturbance-observer-based approach. IFAC Proceedings Volumes, 2002, 35(1): 19−24 [40] Guo L, Chen W H. Disturbance attenuation and rejection for systems with nonlinearity via DOBC approach. International Journal of Robust and Nonlinear Control, 2005, 15(3): 109−125 doi: 10.1002/rnc.978 [41] Hurme E, Lenzi I, Wikelski M, Wild T A, Dechmann D K N. Bats surf storm fronts during spring migration. Science, 2025, 387(6729): 97−102 doi: 10.1126/science.ade7441 [42] 罗战虎. 地效飞行器发展综述. 科技创新导报, 2021, 18(9): 17−22Luo Zhan-Hu. A review of the development of wing-in-ground (WIG) aircraft. Science and Technology Innovation Herald, 2021, 18(9): 17−22 [43] Benzi R, Sutera A, Vulpiani A. The mechanism of stochastic resonance. Journal of Physics A: Mathematical and General, 1981, 14(11): L453−L457 doi: 10.1088/0305-4470/14/11/006 [44] Gammaitoni L, Hänggi P, Jung P, Marchesoni F. Stochastic resonance. Reviews of Modern Physics, 1998, 70(1): 223−287 doi: 10.1103/RevModPhys.70.223 [45] Chapeau-Blondeau F. Noise-aided nonlinear Bayesian estimation. Physical Review E, 2002, 66(3): Article No. 032101 [46] Chapeau-Blondeau F, Rousseau D. Noise-enhanced performance for an optimal Bayesian estimator. IEEE Transactions on Signal Processing, 2004, 52(5): 1327−1334 doi: 10.1109/TSP.2004.826176 [47] Meissner P, Witrisal K. Multipath-assisted single-anchor indoor localization in an office environment. In: Proceedings of the 19th International Conference on Systems, Signals and Image Processing (IWSSIP). Vienna, Austria: IEEE, 2012. 22−25 [48] Witrisal K, Meissner P, Leitinger E, Shen Y, Gustafson C, Tufvesson F, et al. High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend. IEEE Signal Processing Magazine, 2016, 33(2): 59−70 doi: 10.1109/MSP.2015.2504328 [49] Wang T Y, Li Y X, Liu J C, Hu K K, Shen Y. Multipath-assisted single-anchor localization via deep variational learning. IEEE Transactions on Wireless Communications, 2024, 23(8): 9113−9128 doi: 10.1109/TWC.2024.3359047 [50] Gigi S, Tangirala A K. Quantification of interaction in multiloop control systems using directed spectral decomposition. Automatica, 2013, 49(5): 1174−1183 doi: 10.1016/j.automatica.2013.01.061 [51] Guo Z Y, Zhou J, Guo J G, Cieslak J, Chang J. Coupling-characterization-based robust attitude control scheme for hypersonic vehicles. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6350−6361 doi: 10.1109/TIE.2017.2682031 [52] Guo Z Y, Guo J G, Zhou J, Chang J. Robust tracking for hypersonic reentry vehicles via disturbance estimation-triggered control. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(2): 1279−1289 doi: 10.1109/TAES.2019.2928605 [53] Zhang M H, Jing X J. Energy-saving robust saturated control for active suspension systems via employing beneficial nonlinearity and disturbance. IEEE Transactions on Cybernetics, 2022, 52(10): 10089−10100 doi: 10.1109/TCYB.2021.3069632 [54] Huang Z G, Chen M, Shi P. Disturbance utilization-based tracking control for the fixed-wing UAV with disturbance estimation. IEEE Transactions on Circuits and Systems I: Regular Papers, 2023, 70(3): 1337−1349 doi: 10.1109/TCSI.2022.3229169 [55] Jia J D, Guo K X, Yu X, Zhao W H, Guo L. Accurate high-maneuvering trajectory tracking for quadrotors: A drag utilization method. IEEE Robotics and Automation Letters, 2022, 7(3): 6966−6973 doi: 10.1109/LRA.2022.3176449 [56] Teng H, Lu Y K, Xia P F, Qiao J Z, Guo L. Refined disturbance utilization-based green control for spacecraft with composite actuator disturbances. IEEE/ASME Transactions on Mechatronics, DOI: 10.1109/TMECH.2025.3563132 [57] Zhou X B, Yu X, Guo K X, Zhou S C, Guo L, Zhang Y M, et al. Safety flight control design of a quadrotor UAV with capability analysis. IEEE Transactions on Cybernetics, 2023, 53(3): 1738−1751 doi: 10.1109/TCYB.2021.3113168 [58] Gu Y P, Guo K X, Zhao C L, Yu X, Guo L. Fast reactive mechanism for desired trajectory attacks on unmanned aerial vehicles. IEEE Transactions on Industrial Informatics, 2023, 19(8): 8976−8984 doi: 10.1109/TII.2022.3224980 [59] Meng Y, Qiao J Z, Zhu Y K, Teng H, Zhang J C. Remaining useful life prediction for spacecraft actuator based on multiplicative fault observer. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8489−8501 doi: 10.1109/TAES.2023.3306332 [60] Zhang J C, Liu T Y, Qiao J Z. Solving a reliability-performance balancing problem for control systems with degrading actuators under model predictive control framework. Journal of the Franklin Institute, 2022, 359(9): 4260−4287 doi: 10.1016/j.jfranklin.2022.04.007 [61] Bian J, Zhang J C, Guo K X, Li W S, Yu X, Guo L. Risk-aware path planning using CVaR for quadrotors. In: Proceedings of the 6th International Symposium on Autonomous Systems (ISAS). Nanjing, China: IEEE, 2023. 1−6 [62] Guo L, Zhu Y K, Qiao J Z, Wang C L. Composite anti-disturbance dynamic regulation for systems with multiple disturbances: From stability to balance. In: Proceedings of the 33rd Chinese Control and Decision Conference (CCDC). Kunming, China: IEEE, 2021. 5685−5690 [63] Zhou S C, Wang M, Jia J D, Guo K X, Yu X, Zhang Y M, et al. Fault separation based on an excitation operator with application to a quadrotor UAV. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(4): 4010−4022 doi: 10.1109/TAES.2024.3371967 [64] Jia J D, Zhang W Y, Guo K X, Wang J L, Yu X, Shi Y, et al. EVOLVER: Online learning and prediction of disturbances for robot control. IEEE Transactions on Robotics, 2024, 40: 382−402 doi: 10.1109/TRO.2023.3326318 [65] Yang Y J, Bao Z Y, Qiao J Z, Zhu Y K, Guo L. Refined metamodel disturbance observer-based control for coarse pointing assembly under constraints. Guidance, Navigation and Control, 2024, 4(4): Article No. 2450017 doi: 10.1142/S2737480724500171 [66] 谭铁牛. 加强国际治理与合作推动人工智能向善向好. 当代世界, 2025(5): 4−9Tan Tie-Niu. Promoting AI for good through intensified global governance and cooperation. Contemporary World, 2025(5): 4−9 [67] 曾凯, 王耀南, 谭浩然, 方遒, 汪渊, 袁礼伟. AI大模型驱动的具身智能人形机器人技术与展望. 中国科学: 信息科学, 2025, 55(5): 967−992 doi: 10.1360/SSI-2024-0350Zeng Kai, Wang Yao-Nan, Tan Hao-Ran, Fang Qiu, Wang Yuan, Yuan Li-Wei. Prospects and technology of embodied intelligent humanoid robots driven by AI large models. Scientia Sinica Informationis, 2025, 55(5): 967−992 doi: 10.1360/SSI-2024-0350 -

 下载:
下载:

图(2) / 表(1)
计量
- 文章访问数: 1278
- HTML全文浏览量: 728
- PDF下载量: 281
- 被引次数: 0
