

Prescribed-time Generalized Nash Equilibrium Seeking Algorithm for Second-order Multi-agent Systems Over Unbalanced Directed Graphs
-
摘要: 针对一类带有全局耦合等式约束的分布式非合作博弈问题, 提出一种适用于二阶多智能体系统的预设时间分布式寻优算法. 研究目标是确保在强连通有向图拓扑下, 所有智能体能在预设时间内协同收敛至广义纳什均衡. 为克服通信拓扑权重不平衡带来的系统偏差, 算法采用两阶段收敛策略: 第一阶段利用一致性机制精确估计拉普拉斯矩阵的左特征向量, 实现拓扑补偿; 第二阶段通过引入阻尼项保障二阶积分型系统的可控性, 并结合拉格朗日乘子法处理全局约束, 同时利用基于领导$-$跟随一致性协议的估计器重构对手的决策信息, 以实现伪梯度的分布式更新. 此外, 针对权重平衡有向图这一特殊情形, 给出算法的简化实现形式. 在博弈映射满足强单调性假设下, 通过引入时间变换函数并构造新型李雅普诺夫函数, 从理论上严格证明系统能够在预设时间内收敛至广义纳什均衡, 并确保收敛后的持续稳定性. 最后, 数值仿真实验验证了算法在不同拓扑结构下的有效性与收敛精度.Abstract: This paper investigates a class of distributed non-cooperative game problems with global coupling equality constraints and proposes a prescribed-time distributed seeking algorithm for second-order multi-agent systems. The objective is to ensure that all agents cooperatively converge to the generalized Nash equilibrium within a prescribed time under strongly connected directed graph topologies. To overcome system biases caused by weight-unbalanced communication topologies, a two-stage convergence strategy is adopted: In the first stage, a consistency mechanism is utilized to accurately estimate the left eigenvector of the Laplacian matrix for topology compensation; In the second stage, a damping term is introduced to guarantee the controllability of the second-order integrator-type systems, combined with Lagrange multipliers to handle global constraints, while an estimator based on the leader-follower consensus protocol is employed to reconstruct opponents' decision information for distributed pseudo-gradient updates. Furthermore, the simplified implementation of the algorithm for the special case of weight-balanced directed graphs is provided. Under the assumption of strong monotonicity of the game mapping, by introducing a time transformation function and constructing a novel Lyapunov function, it is theoretically and rigorously proved that the system can converge to the generalized Nash equilibrium within the prescribed time and maintain sustained stability thereafter. Finally, numerical simulation experiments verify the effectiveness and convergence accuracy of the algorithm under different topologies.
-
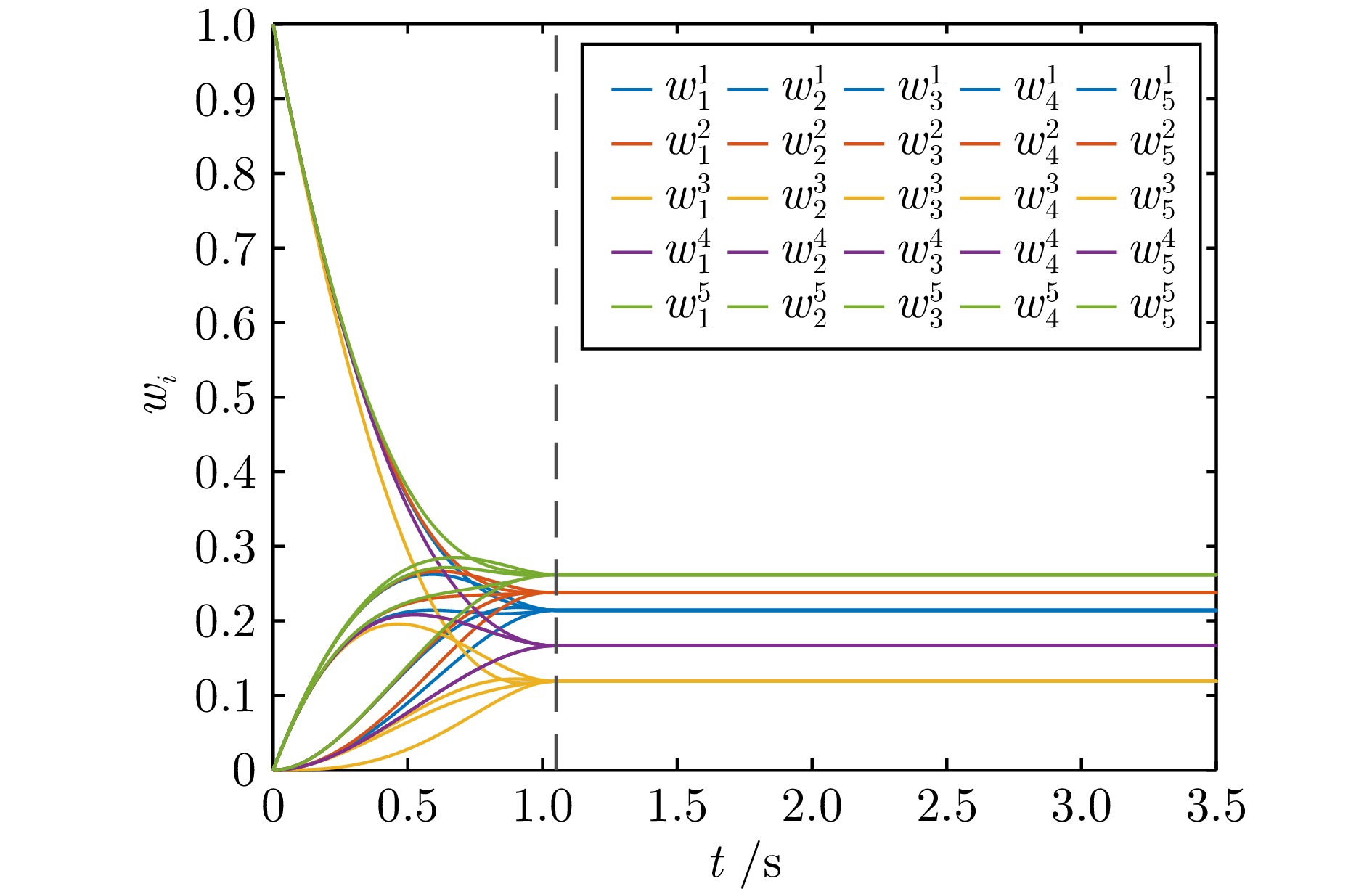
图 5 基于算法(6) ~ (7)的$w_i$状态轨迹图
Fig. 5 The state trajectory plot of $w_i$ by algorithm (6) ~ (7)
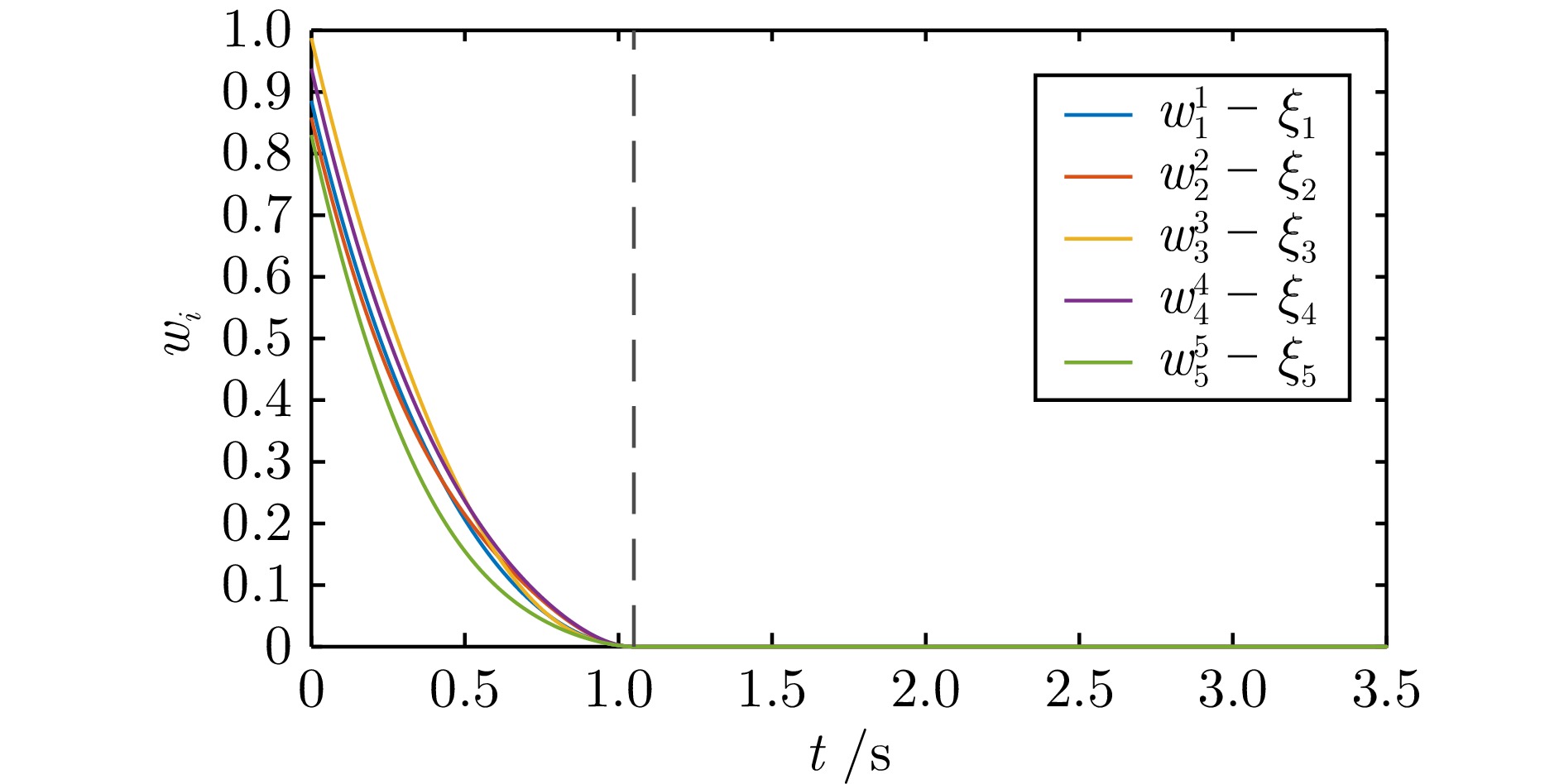
图 6 基于算法(6) ~ (7)的左特征向量估计误差图
Fig. 6 The estimation error plot of the left eigenvector by algorithm (6) ~ (7)
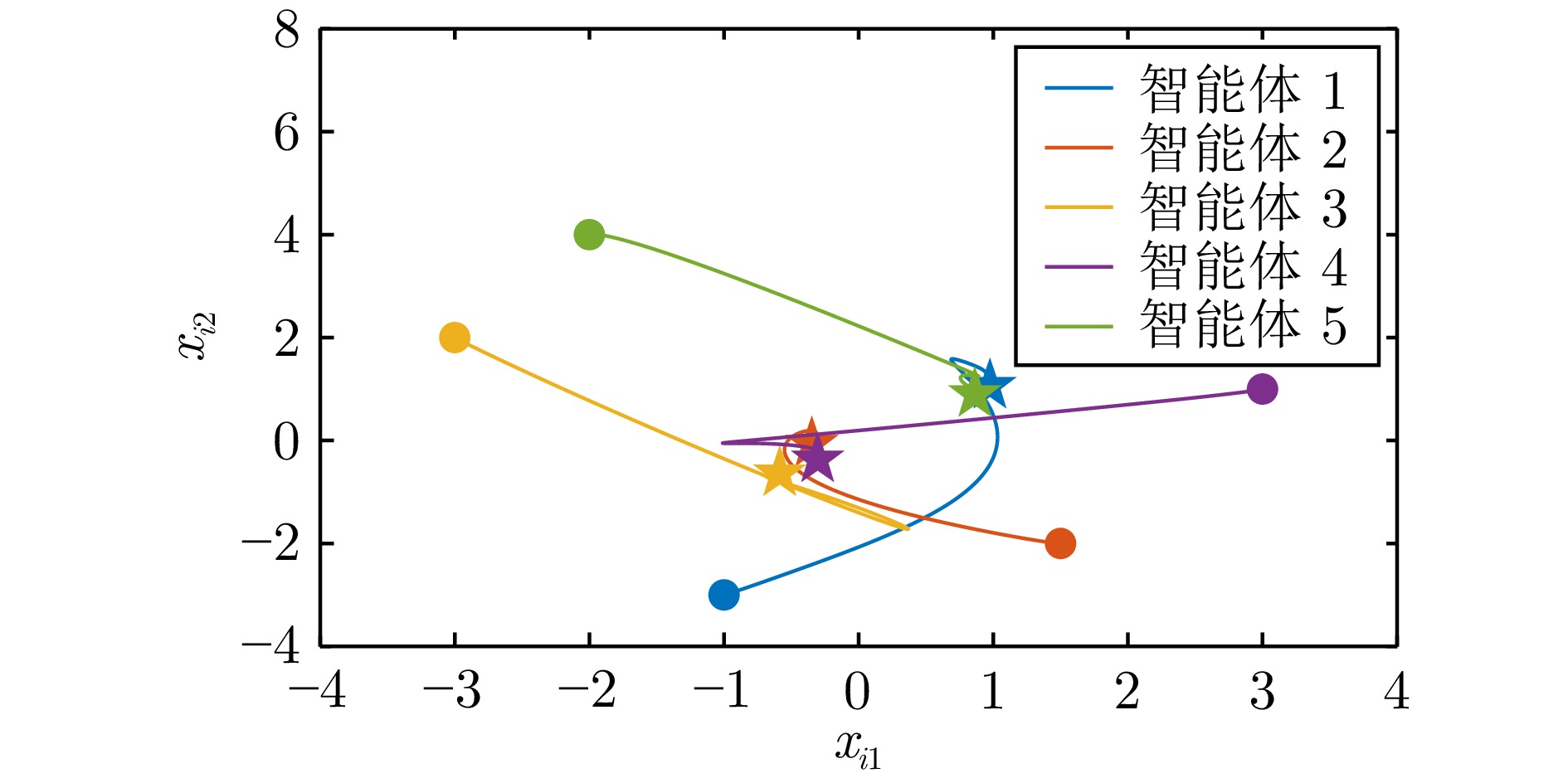
图 2 基于算法(6) ~ (7)的$x_i$状态轨迹图
Fig. 2 The state trajectory plot of $x_i$ by algorithm (6) ~ (7)
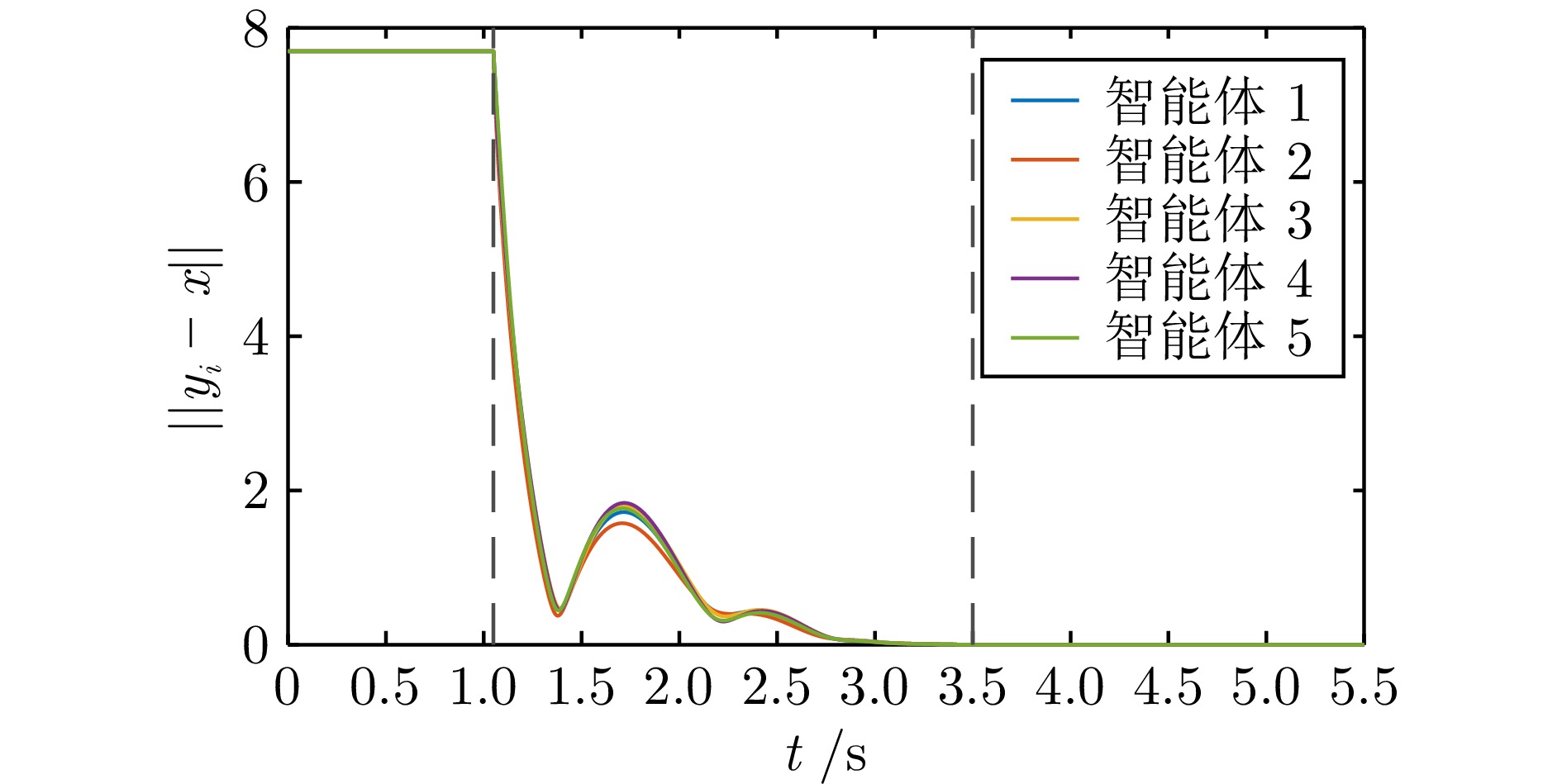
图 3 基于算法(6) ~ (7)的$\|y_i-x\|$状态轨迹图
Fig. 3 The state trajectory plot of $\|y_i-x\|$ by algorithm (6) ~ (7)
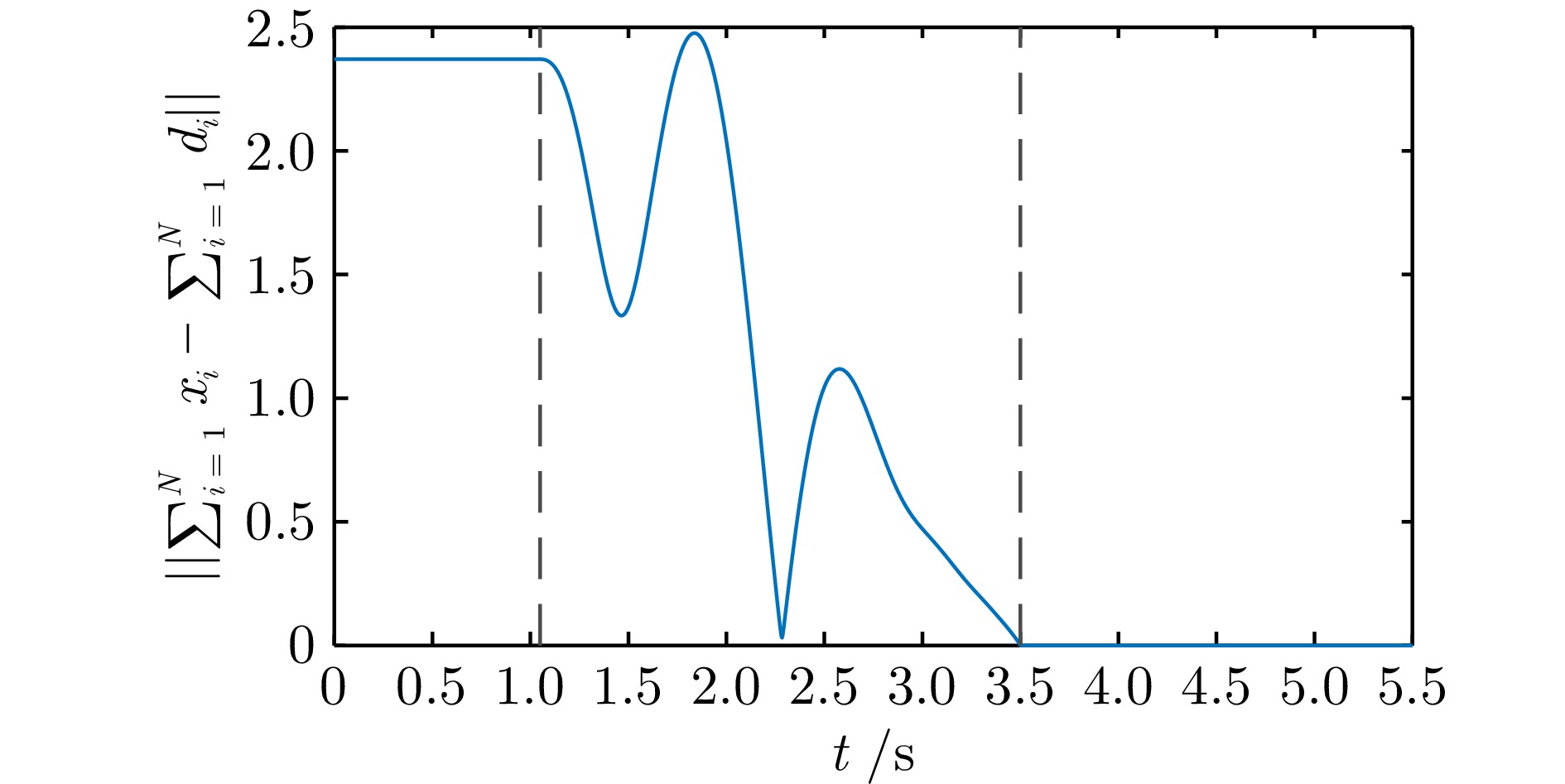
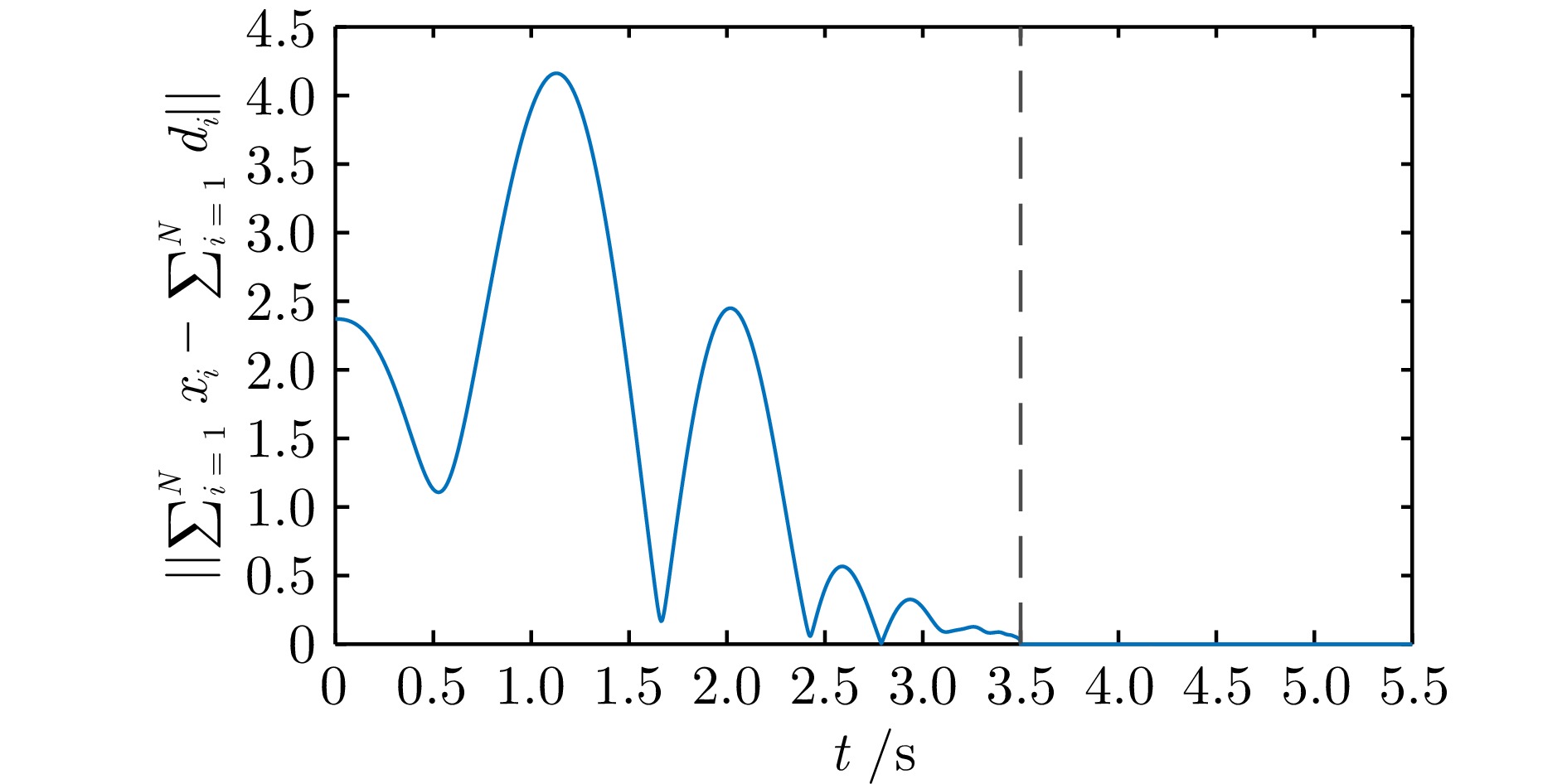
图 4 基于算法(6)~(7)的$\|\sum_{i=1}^{N} x_i - \sum_{i=1}^{N} d_i\|$状态轨迹图
Fig. 4 The state trajectory plot of $\|\sum_{i=1}^{N} x_i - \sum_{i=1}^{N} d_i\|$ by algorithm (6)~(7)
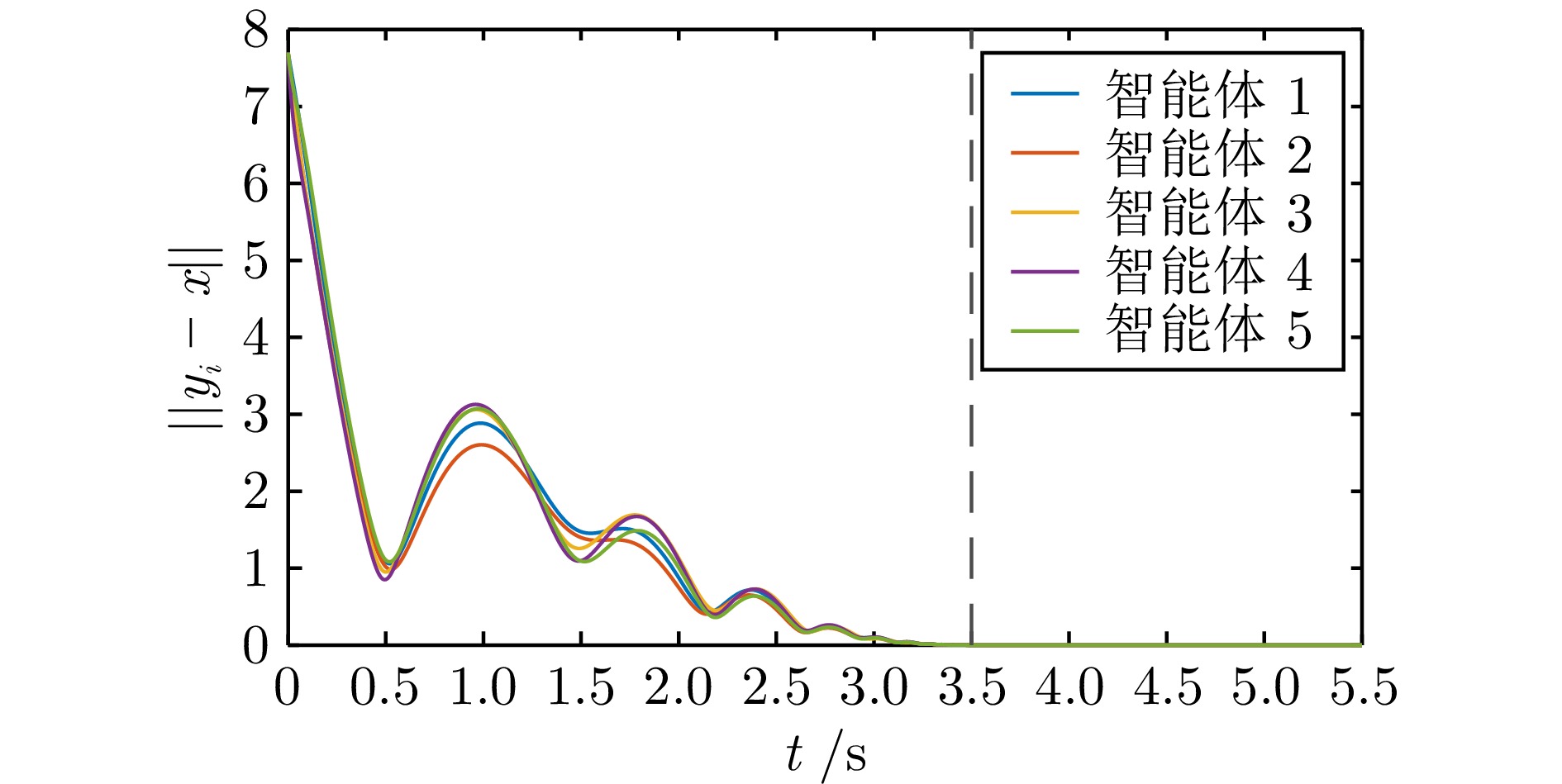
图 9 基于算法(23)的$\|y_i-x\|$状态轨迹图
Fig. 9 The state trajectory plot of $\|y_i-x\|$ by algorithm (23)
-
[1] Deng Z H. Distributed algorithm design for aggregative games of Euler-Lagrange systems and its application to smart grids. IEEE Transactions on Cybernetics, 2022, 52(8): 8315−8325 doi: 10.1109/TCYB.2021.3049462 [2] 冯育凯, 吴正兴, 谭民. 基于MARL-MHSA架构的水下仿生机器人协同围捕策略: 数据驱动建模与分布式策略优化. 自动化学报, 2025, 51(10): 2269−2282Feng Yu-Kai, Wu Zheng-Xing, Tan Min. Cooperative pursuit policy for bionic underwater robot based on MARL-MHSA architecture: Data-driven modeling and distributed strategy optimization. Acta Automatica Sinica, 2025, 51(10): 2269−2282 [3] 江碧涛, 温广辉, 周佳玲, 郑德智. 智能无人集群系统跨域协同技术研究现状与展望. 中国工程科学, 2024, 26(1): 117−126 doi: 10.15302/J-SSCAE-2024.01.015Jiang Bi-Tao, Wen Guang-Hui, Zhou Jia-Ling, Zheng De-Zhi. Cross-Domain cooperative technology of intelligent unmanned swarm systems: Current status and prospects. Chinese Engineering Sciences, 2024, 26(1): 117−126 doi: 10.15302/J-SSCAE-2024.01.015 [4] Dong S L, Liu E J, Bian Y G, Wu Z G, Liu M Q. Cooperative fuzzy event-based tracking control of heterogeneous multiple marine vehicles with a nonautonomous leader. IEEE Transactions on Cybernetic, 2025, 55(9): 4158−4169 doi: 10.1109/TCYB.2025.3585693 [5] Dong S L, Lai Z Y, Wu Z G, Liu M Q, Chen G R. Cooperative quantized event-based fuzzy tracking control of nonlinear autonomous surface vehicles with prescribed performance. IEEE Transactions on Automation Science and Engineering, 2025, 22: 17594−17605 doi: 10.1109/TASE.2025.3581224 [6] Wen G H, Zheng W X, Wan Y. Distributed robust optimization for networked agent systems with unknown nonlinearities. IEEE Transactions on Automatic Control, 2023, 68(9): 5230−5244 doi: 10.1109/TAC.2022.3216965 [7] Ye M J, Han Q L, Ding L, Xu S Y. Distributed Nash equilibrium seeking in games with partial decision information: A survey. Proceedings of the IEEE, 2023, 111(2): 140−157 doi: 10.1109/JPROC.2023.3234687 [8] Ye M J, Hu G Q. Distributed Nash equilibrium seeking by a consensus based approach. IEEE Transactions on Automatic Control, 2017, 62(9): 4811−4818 doi: 10.1109/TAC.2017.2688452 [9] Ye M J, Hu G Q. Game design and analysis for price-based demand response: An aggregate game approach. IEEE Transactions on Cybernetics, 2017, 47(3): 720−730 doi: 10.1109/TCYB.2016.2524452 [10] Gadjov D, Pavel L. A passivity-based approach to Nash equilibrium seeking over networks. IEEE Transactions on Automatic Control, 2019, 64(3): 1077−1092 doi: 10.1109/TAC.2018.2833140 [11] De Persis C, Grammatico S. Distributed averaging integral Nash equilibrium seeking on networks. Automatica, 2019, 110: Article No. 108548 doi: 10.1016/j.automatica.2019.108548 [12] Zeng X L, Chen J, Liang S, Hang Y. Generalized Nash equilibrium seeking strategy for distributed nonsmooth multi-cluster game. Automatica, 2019, 103: 20−26 doi: 10.1016/j.automatica.2019.01.025 [13] Zhu Y N, Yu W W, Ren W, Wen G H, Gu J P. Generalized Nash equilibrium seeking via continuous-time coordination dynamics over digraphs. IEEE Transactions on Control of Network Systems, 2021, 8(2): 1023−1033 doi: 10.1109/TCNS.2021.3056034 [14] Ding L, Chen C, Ye M J, Han Q L. Fully distributed Nash equilibrium seeking: A double-layer adaptive approach. IEEE Transactions on Neural Networks and Learning Systems, 2025, 36(7): 13358−13372 doi: 10.1109/TNNLS.2024.3489356 [15] Deng Z H, Liu Y Y, Chen T. Generalized Nash equilibrium seeking algorithm design for distributed constrained noncooperative games with second-order players. Automatica, 2022, 141: Article No. 110317 doi: 10.1016/j.automatica.2022.110317 [16] 时侠圣, 任璐, 孙长银. 自适应分布式聚合博弈广义纳什均衡算法. 自动化学报, 2024, 50(6): 1210−1220 doi: 10.16383/j.aas.c230584Shi Xia-Sheng, Ren Lu, Sun Chang-Yin. Distributed adaptive generalized Nash equilibrium algorithm for aggregative games. Acta Automatica Sinica, 2024, 50(6): 1210−1220 doi: 10.16383/j.aas.c230584 [17] 文利燕, 刘宇, 姜斌, 马亚杰, 崔玉康. 切换拓扑下混合相对阶异构多智能体系统自适应扰动抑制设计. 自动化学报, 2026, 52(1): 121−136Wen Li-Yan, Liu Yu, Jiang Bin, Ma Ya-Jie, Cui Yu-Kang. Adaptive disturbance rejection for mixed relative degree heterogeneous multi-agent systems with switching topology. Acta Automatica Sinica, 2026, 52(1): 121−136 [18] Du H, Wen G H, Cheng Y Y, He Y G, Jia R T. Distributed finite-time cooperative control of multiple high-order nonholonomic mobile robots. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(12): 2998−3006 doi: 10.1109/TNNLS.2016.2610140 [19] Fang X, Lu J H, Wen G H. Distributed finite-time Nash equilibrium seeking for non-cooperative games. CSIAM Transactions on Applied Mathematics, 2021, 2(1): 162−174 doi: 10.4208/csiam-am.2020-0028 [20] Sun X H, Du H B, Chen W L, Zhu W W. Distributed finite-time formation control of multiple mobile robot systems without global information. IEEE/CAA Journal of Automatica Sinica, 2025, 12(3): 630−632 doi: 10.1109/JAS.2023.123981 [21] Wang M X, Zhou M T, Qin S T. Fixed-time consensus-based distributed Nash equilibrium seeking for noncooperative game with second-order players. Neurocomputing, 2023, 555: Article No. 126650 doi: 10.1016/j.neucom.2023.126650 [22] Hua M H, Yao X Y, Liu W J, Geng M J, Lv M L. Optimizing fixed-time generalized Nash equilibrium Seeking in multi-autonomous aerial vehicle games. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(3): 6339−6353 doi: 10.1109/TAES.2025.3526559 [23] Liu J, Ran G T, Wu Y B, Xue L, Sun C Y. Dynamic event-triggered practical fixed-time consensus for nonlinear multiagent systems. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(4): 2156−2160 [24] Poveda J I, Krstic M, Başar T. Fixed-time Nash equilibrium seeking in time-varying networks. IEEE Transactions on Automatic Control, 2023, 68(4): 1954−1969 doi: 10.1109/TAC.2022.3168527 [25] Sun M W, Liu J, Ren L, Sun C Y. Fixed-time consensus-based Nash equilibrium seeking. IEEE/CAA Journal of Automatica Sinica, 2024, 11(1): 267−269 doi: 10.1109/JAS.2023.123900 [26] Zhou S H, Deng C, Fan S, Wang B H. Fixed-time resilient distributed NE seeking control for nonlinear MASs against DoS attacks. IEEE Transactions on Cybernetics, 2025, 55(7): 3368−3378 doi: 10.1109/TCYB.2025.3561161 [27] 张苗苗, 叶茂娇, 郑元世. 预设时间下的分布式优化和纳什均衡点求解. 控制理论与应用, 2022, 39(8): 1397−1406Zhang Miao-Miao, Ye Mao-Jiao, Zheng Yuan-Shi. Prescribed-time distributed optimization and Nash equilibrium seeking. Control Theory and Applications, 2022, 39(8): 1397−1406 [28] Chen Y Y, Hua Y Z, Feng Z, Dong X W. Adaptive prescribed-time distributed Nash equilibrium seeking for networked games with heterogeneous dynamics and unknown uncertainties. IEEE Transactions on Control of Network Systems, 2025, 12(2): 1744−1755 doi: 10.1109/TCNS.2025.3528094 [29] Rui J Y, Ding L, Ye M J, Ning B D. Prescribed-time distributed ontegral sliding-mode-based least-norm Nash equilibrium seeking in monotone games under disturbances. IEEE Transactions on Cybernetics, DOI: 10.1109/TCYB.2025.3632288 [30] Liu J, Yi P. Predefined-time distributed Nash equilibrium seeking for noncooperative games with event-triggered communication. IEEE Transactions on Circuits and Systems II: Express Briefs, 2023, 70(9): 3434−3438 doi: 10.1109/tcsii.2023.3259483 [31] Qian C, Ding L. Prescribed-time fully distributed Nash equilibrium seeking strategy in networked games. IEEE/CAA Journal of Automatica Sinica, 2024, 11(1): 261−263 doi: 10.1109/JAS.2023.123933 [32] Xu B, Li Y X. Prescribed-time fully distributed Nash equilibrium seeking of nonlinear multi-agent systems over unbalanced digraphs. Automatica, 2024, 169: Article No. 111847 doi: 10.1016/j.automatica.2024.111847 [33] Lian Y X, Zhang B Y, Yuan D M, Yao Y, Song B. Prescribed-time distributed resource allocation algorithm for heterogeneous linear multi-agent networks with unbalanced directed communication. Applied Mathematics and Computation, 2025, 503: Article No. 129498 doi: 10.1016/j.amc.2025.129498 [34] Chen Y Y, Li X D, Feng Z, Hua Y Z, Dong X W. Prescribed-time Nash equilibrium seeking for multicoalition games with heterogeneous general linear dynamics over unbalanced digraphs. IEEE Transactions on Cybernetics, 2025, 55(12): 5803−5815 doi: 10.1109/TCYB.2025.3598948 [35] Facchinei F, Kanzow C. Generalized Nash equilibrium problems. Annals of Operations Research, 2010, 175(1): 177−211 doi: 10.1007/s10479-009-0653-x [36] Benner P, Findeisen R, Flockerzi D, Reichl U, Sundmacher K. Large-scale Networks in Engineering and Life Sciences. Cham: Springer International Publishing, 2014. 17-19 [37] Ruszczyński A.P. Nonlinear Optimization. Princeton: Princeton University Press, 2006. 125-132 [38] Charalambous T, Rabbat M G, Johansson M, Hadjicostis C N. Distributed finite-time computation of digraph parameters: left-eigenvector, out-degree and spectrum. IEEE Transactions on Control of Network Systems, 2016, 3(2): 137−148 doi: 10.1109/TCNS.2015.2428411 -

 下载:
下载:


计量
- 文章访问数: 53
- HTML全文浏览量: 47
- 被引次数: 0
