2025年 第51卷 第9期
2025, 51(9): 1883-1898.
doi: 10.16383/j.aas.c240680
cstr: 32138.14.j.aas.c240680
摘要:
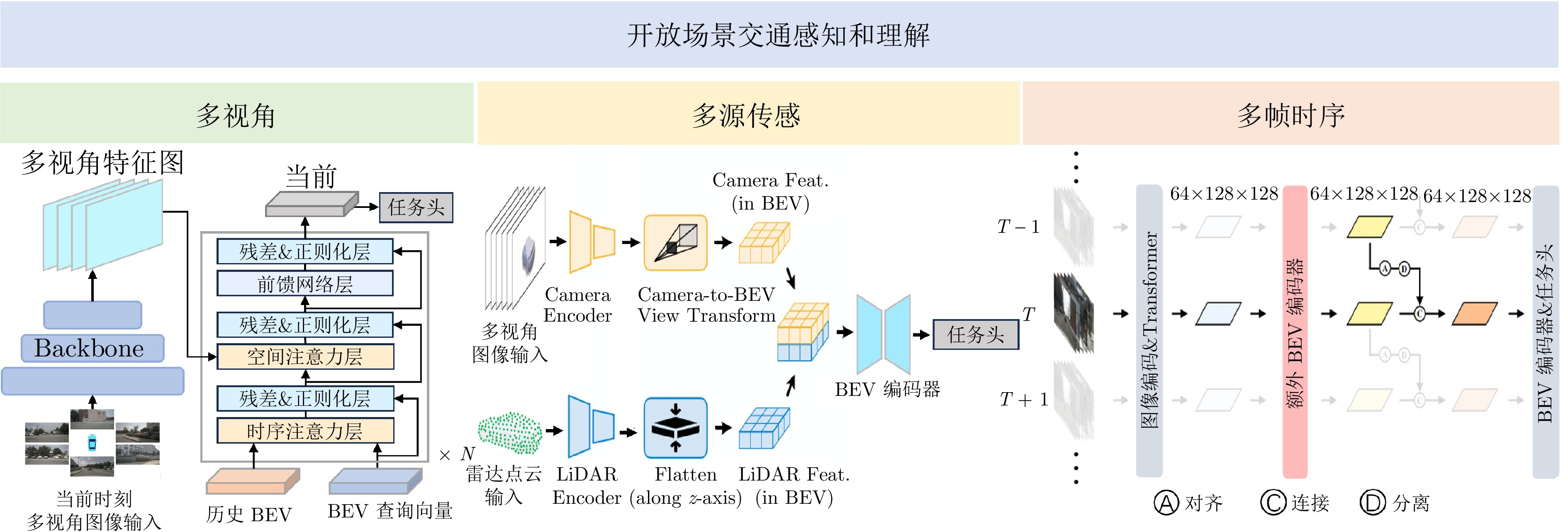
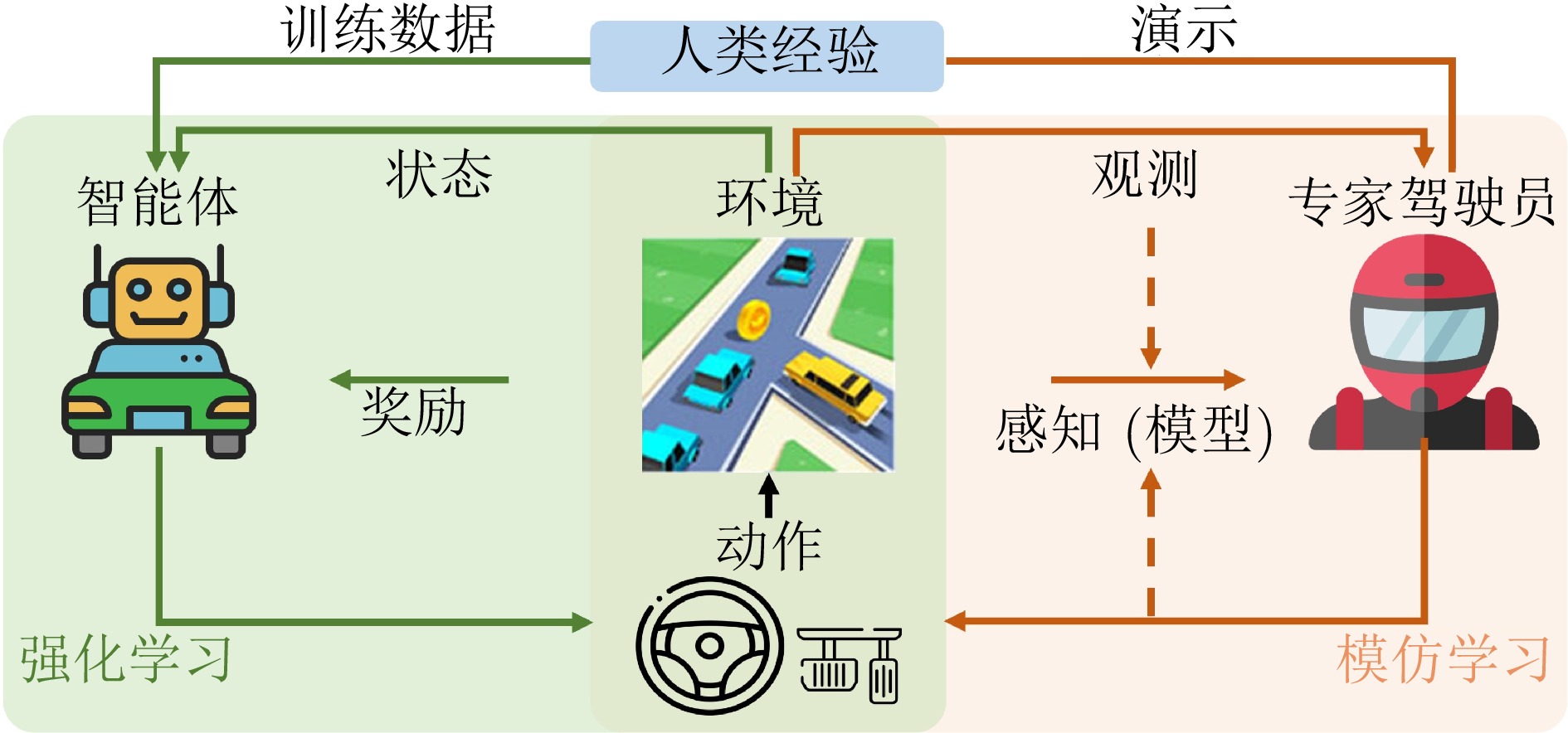
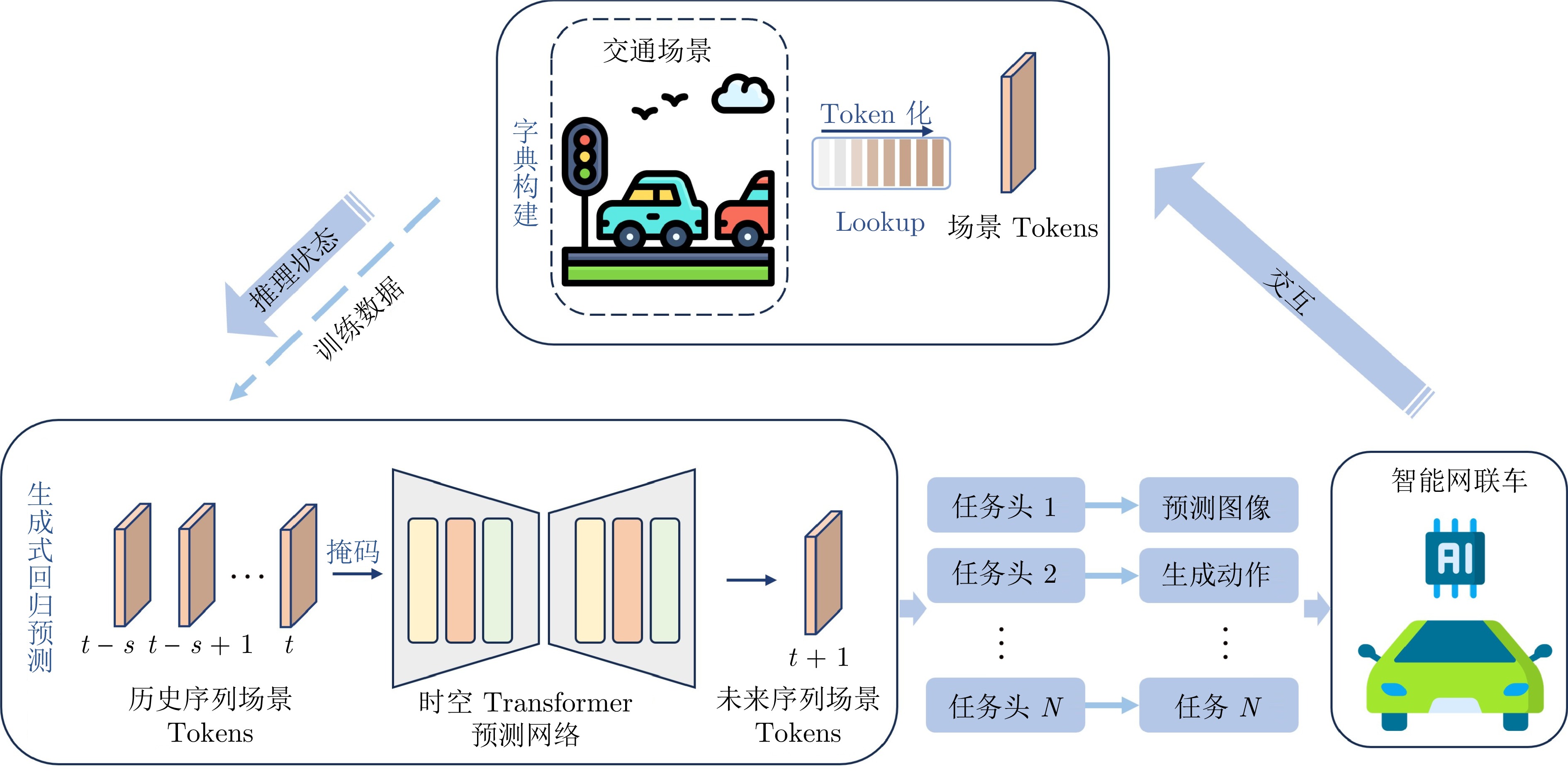
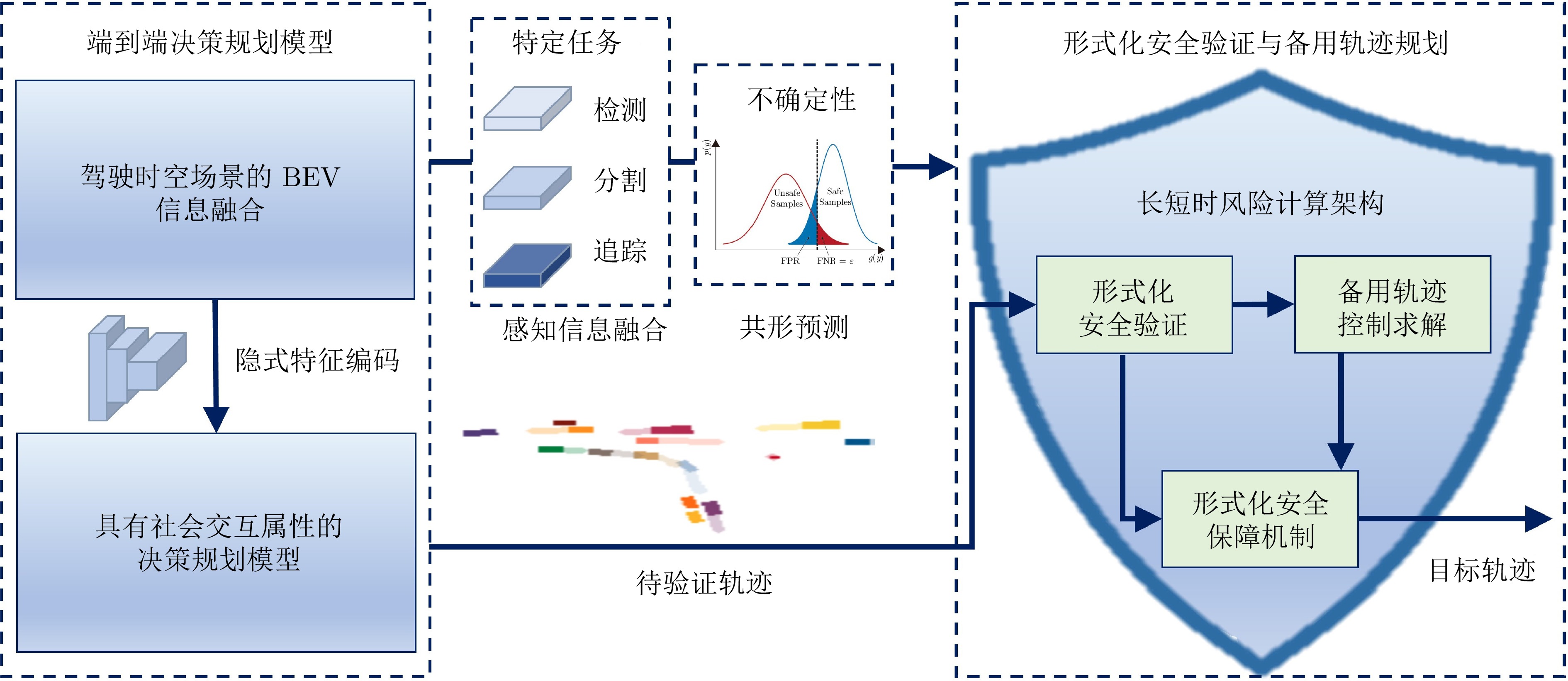
在开放交通场景, 智能网联汽车仍然存在安全可信性弱、交互属性不足等关键瓶颈问题. 随着人工智能(AI)的发展和深度学习的突破, AI模型在自动驾驶领域取得显著成果, 可以应用于自动驾驶中的场景理解和推理. 本文对基于信息融合的智能网联汽车安全交互决策研究进行综述, 首先梳理开放场景交通感知和理解方面的研究, 然后探讨具有社会交互属性的决策规划模型, 最后总结针对AI模型幻觉的安全验证技术. 通过结合三方面研究, 充分利用AI模型的强大能力实现“熟练司机”驾驶技能, 并讨论安全保障技术, 弥补AI模型“偶尔犯错”的不足, 有望解决自动驾驶安全长尾问题, 进一步推动自动驾驶技术的发展.
在开放交通场景, 智能网联汽车仍然存在安全可信性弱、交互属性不足等关键瓶颈问题. 随着人工智能(AI)的发展和深度学习的突破, AI模型在自动驾驶领域取得显著成果, 可以应用于自动驾驶中的场景理解和推理. 本文对基于信息融合的智能网联汽车安全交互决策研究进行综述, 首先梳理开放场景交通感知和理解方面的研究, 然后探讨具有社会交互属性的决策规划模型, 最后总结针对AI模型幻觉的安全验证技术. 通过结合三方面研究, 充分利用AI模型的强大能力实现“熟练司机”驾驶技能, 并讨论安全保障技术, 弥补AI模型“偶尔犯错”的不足, 有望解决自动驾驶安全长尾问题, 进一步推动自动驾驶技术的发展.

2025, 51(9): 1899-1921.
doi: 10.16383/j.aas.c240714
cstr: 32138.14.j.aas.c240714
摘要:
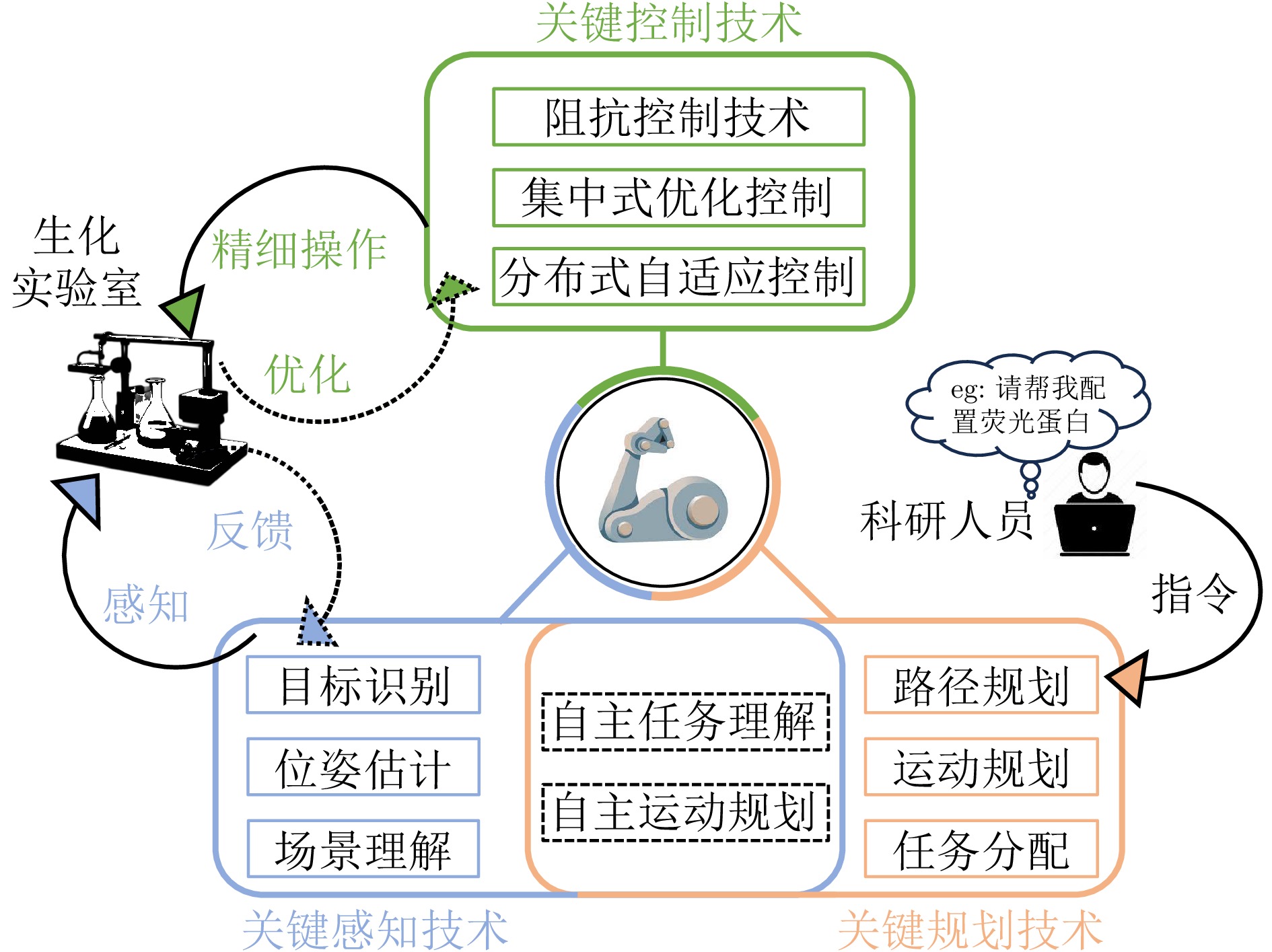
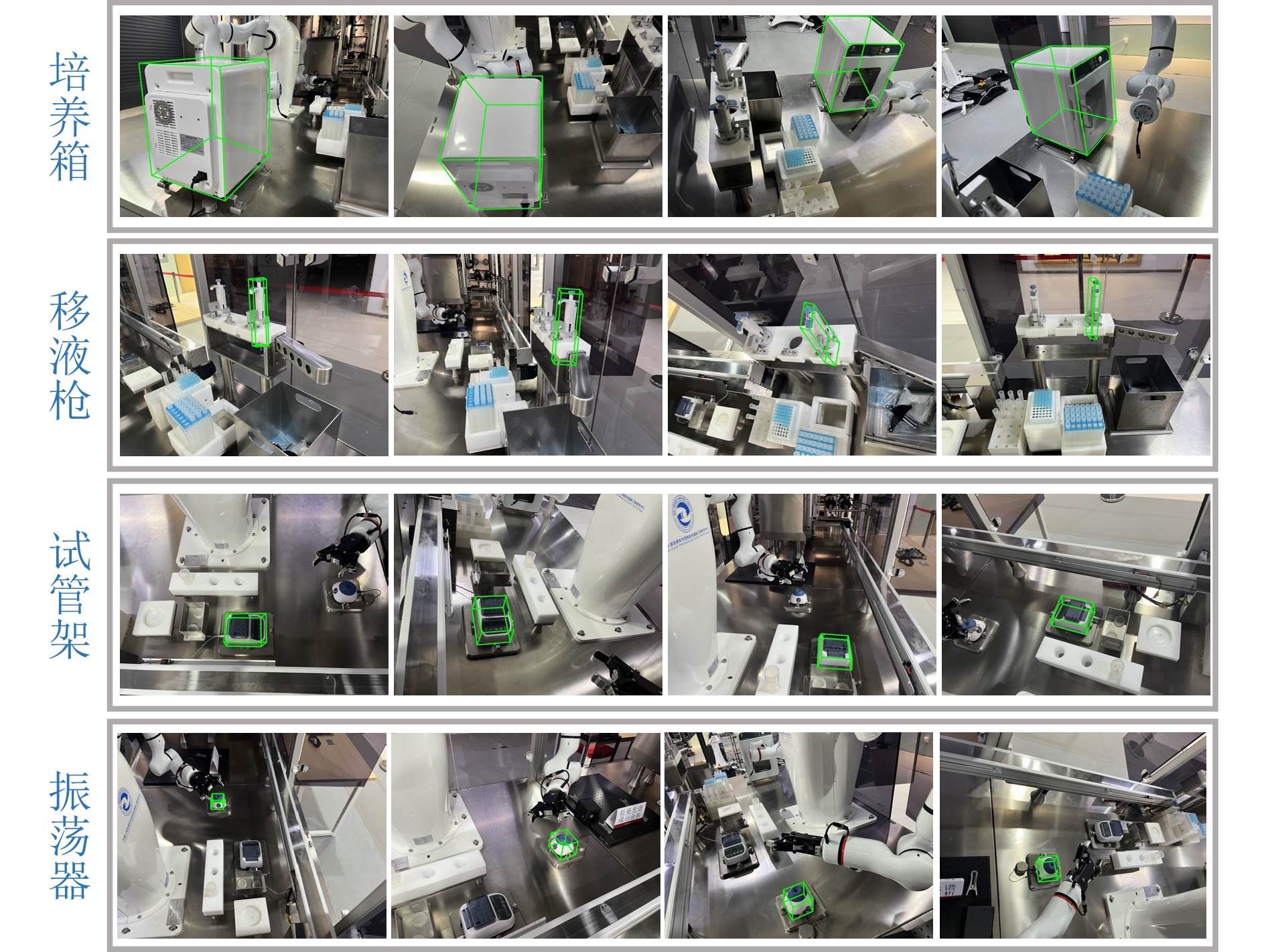
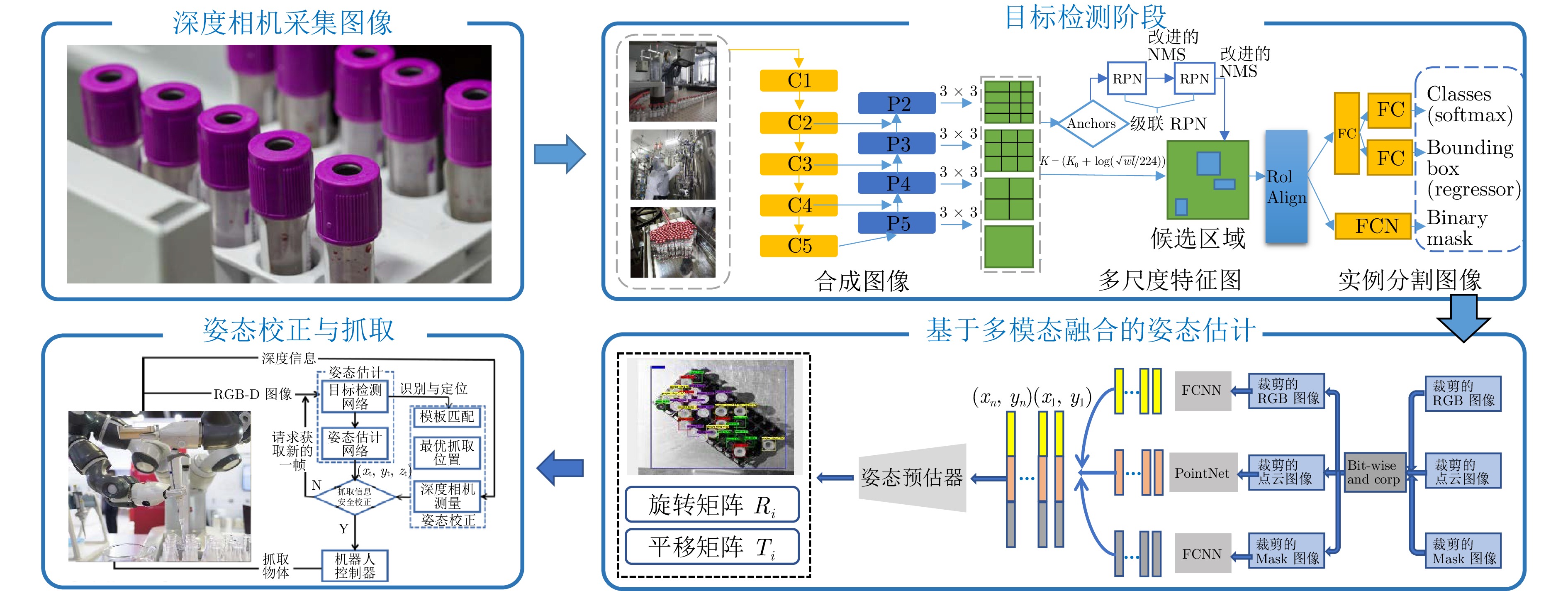
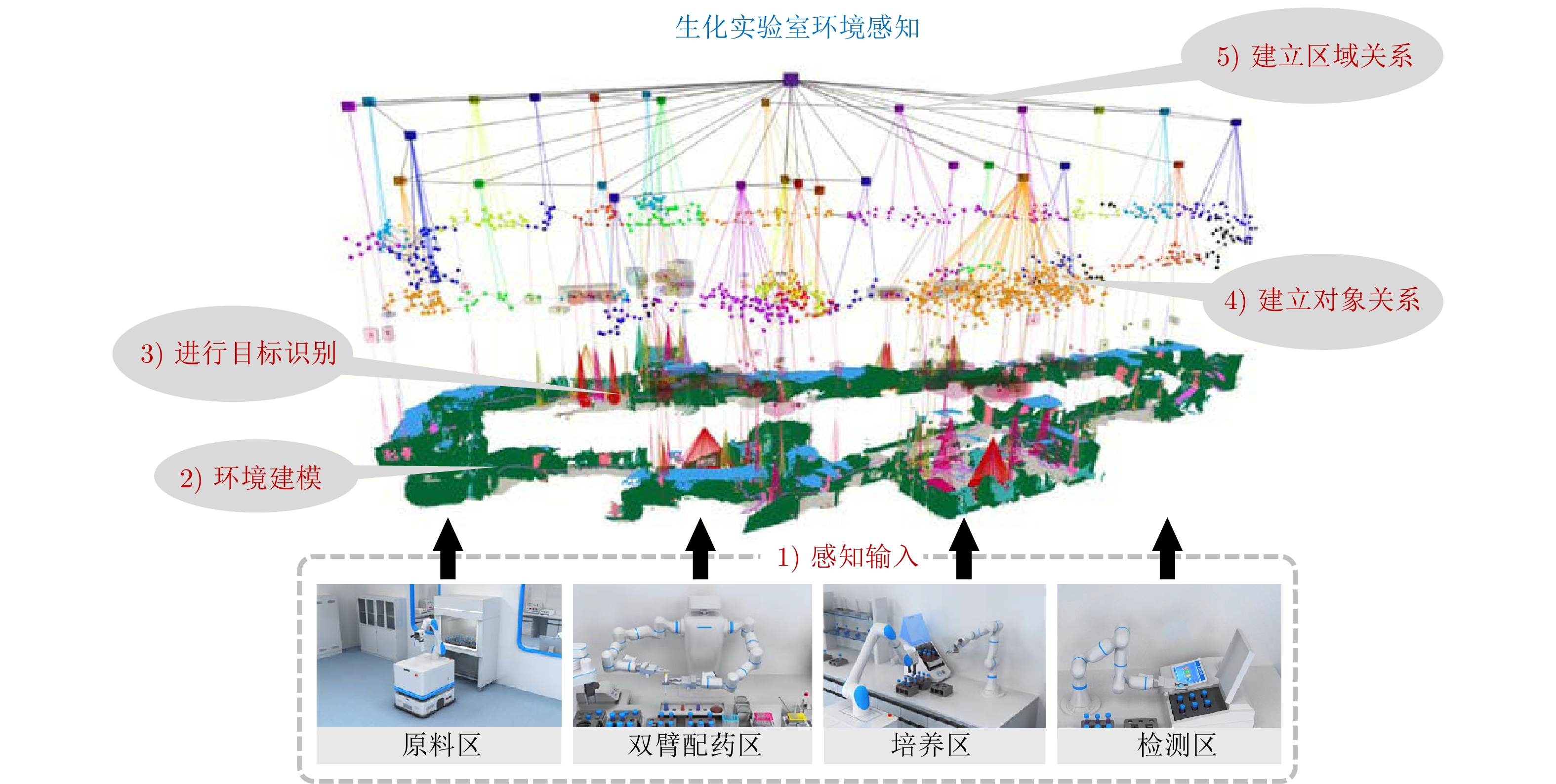
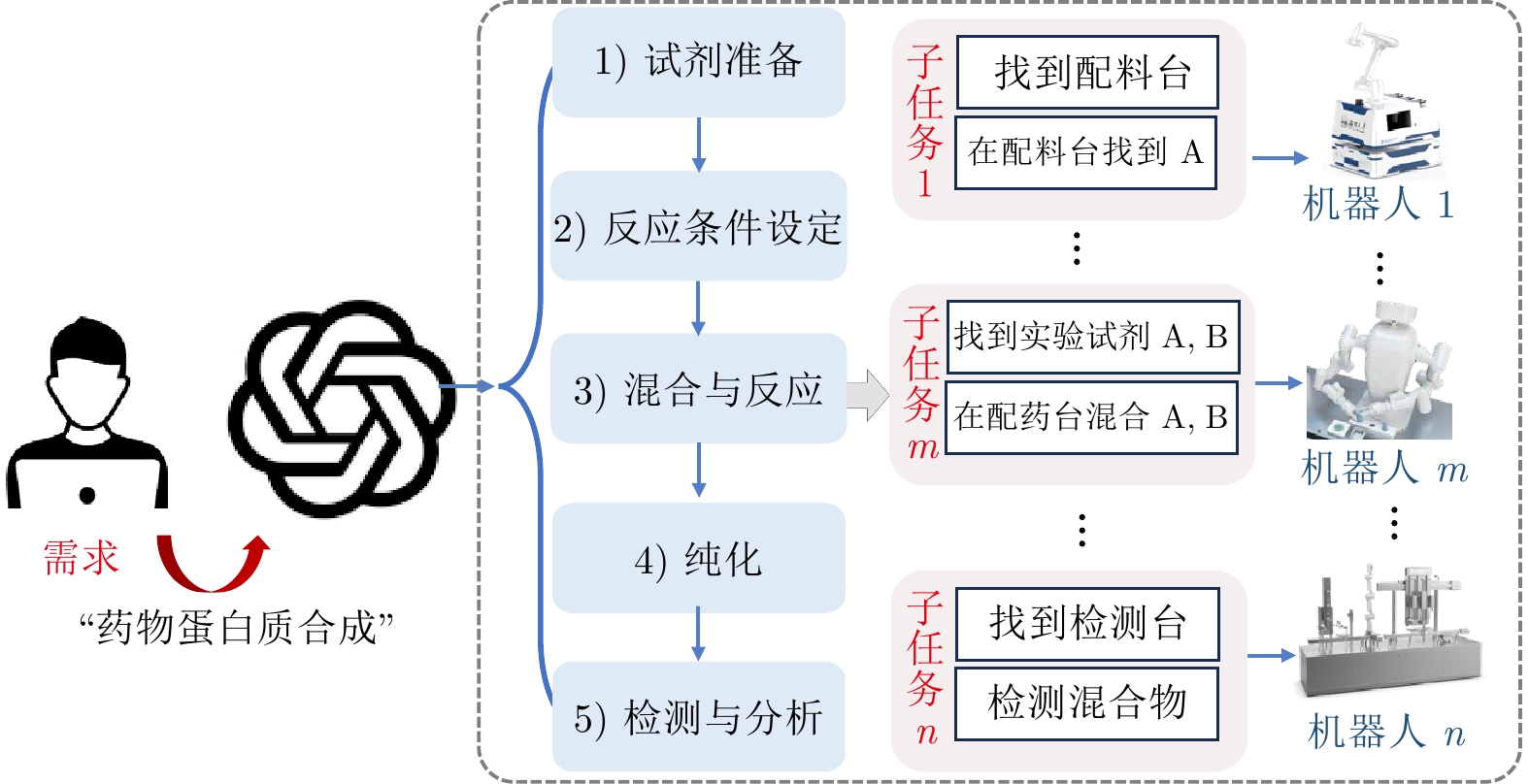
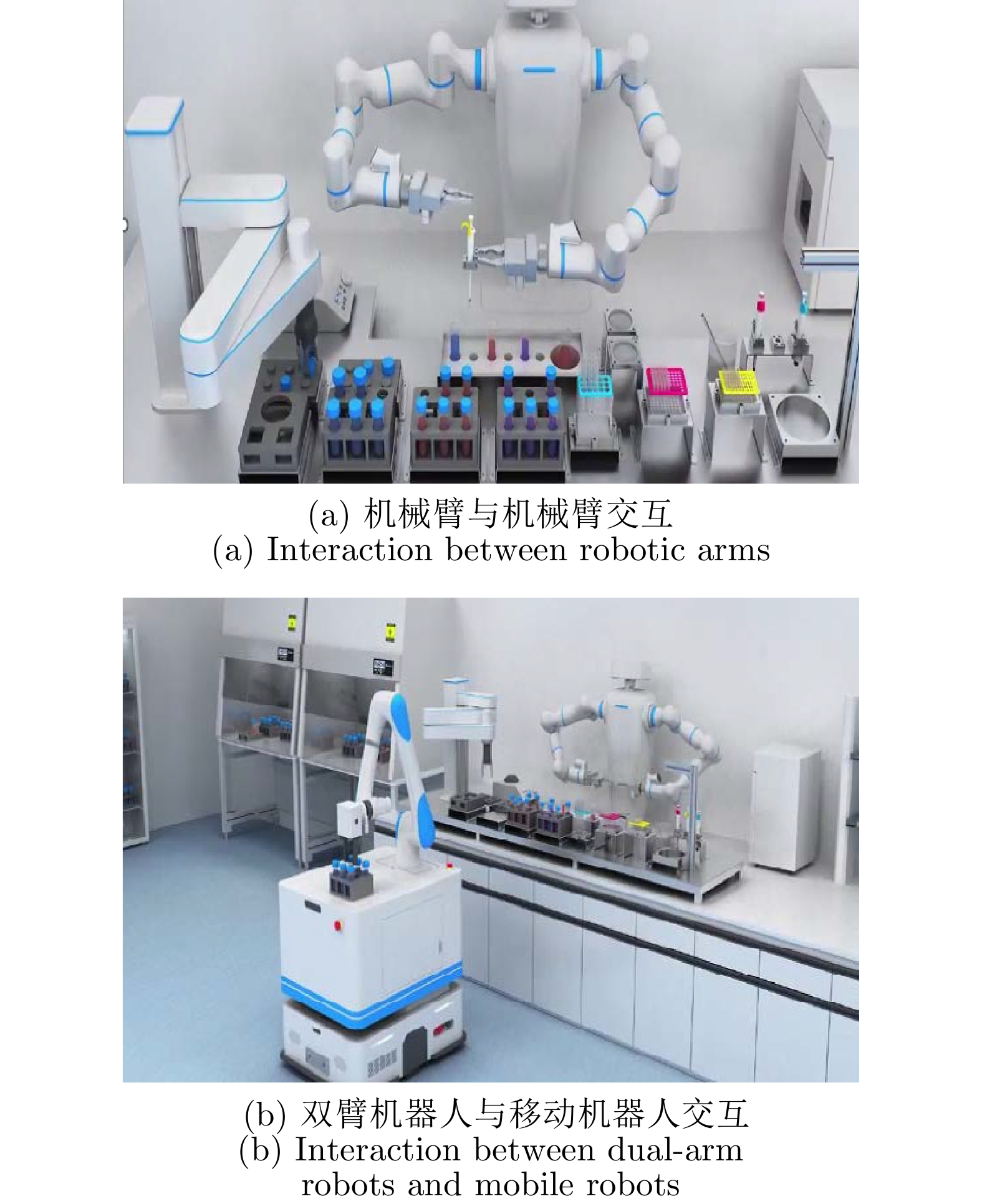
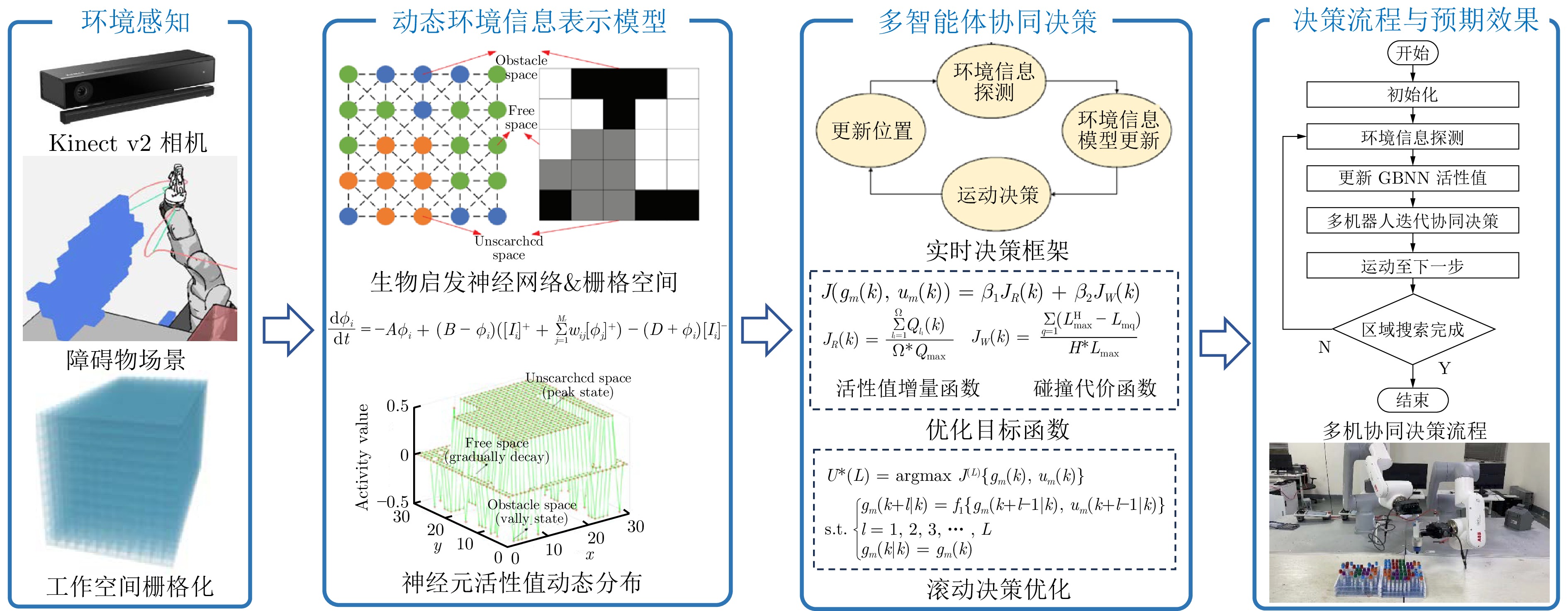
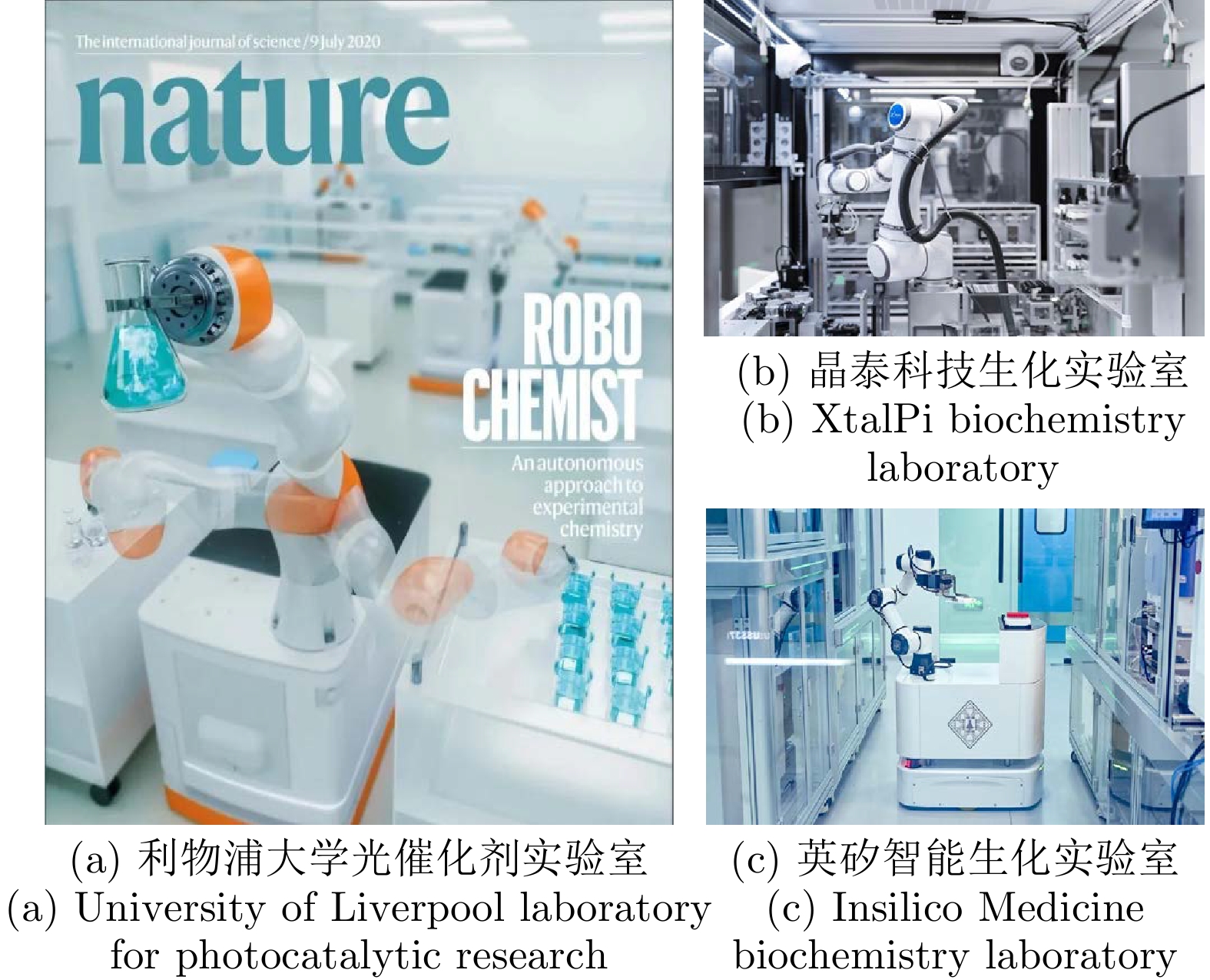
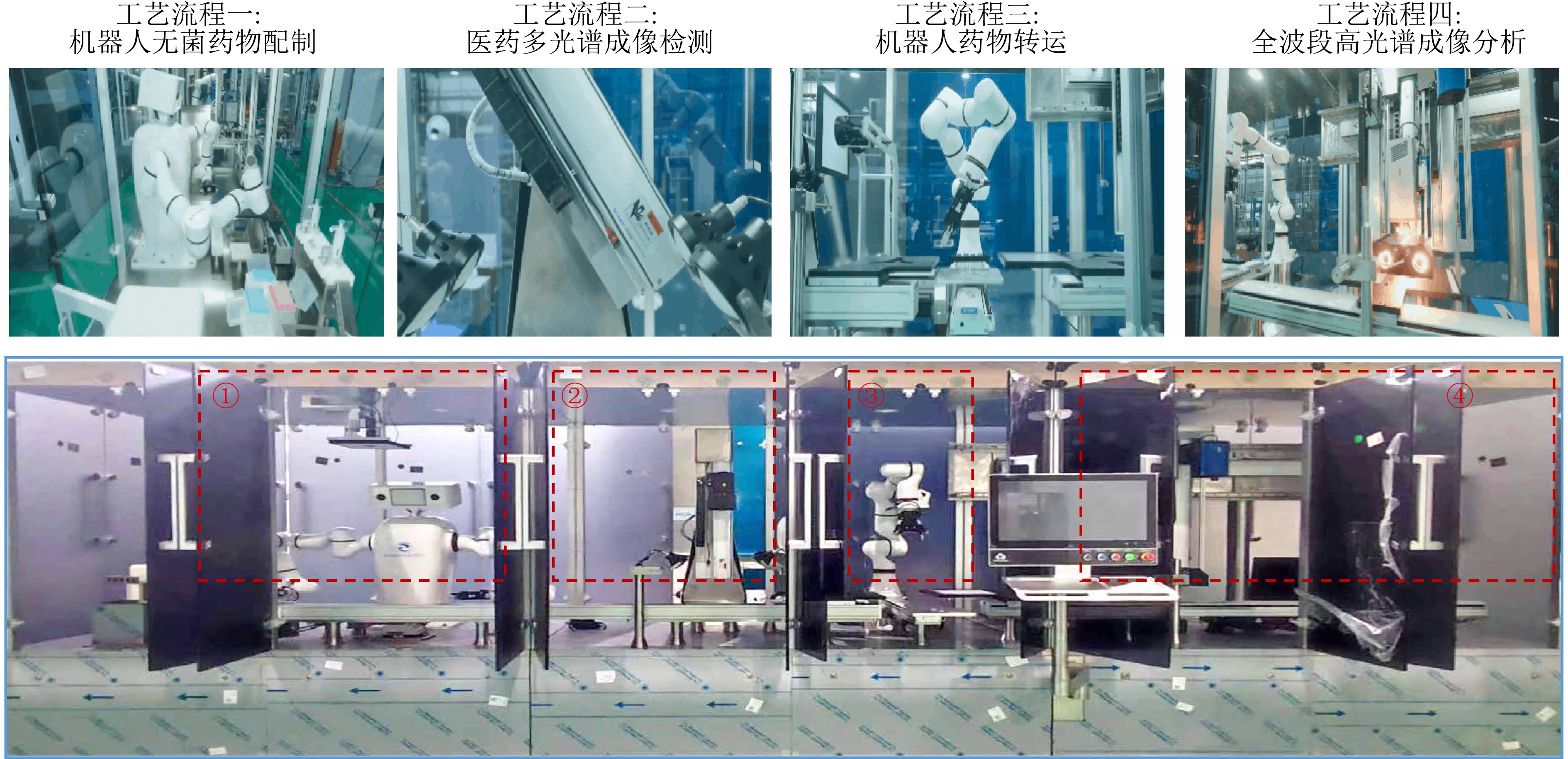
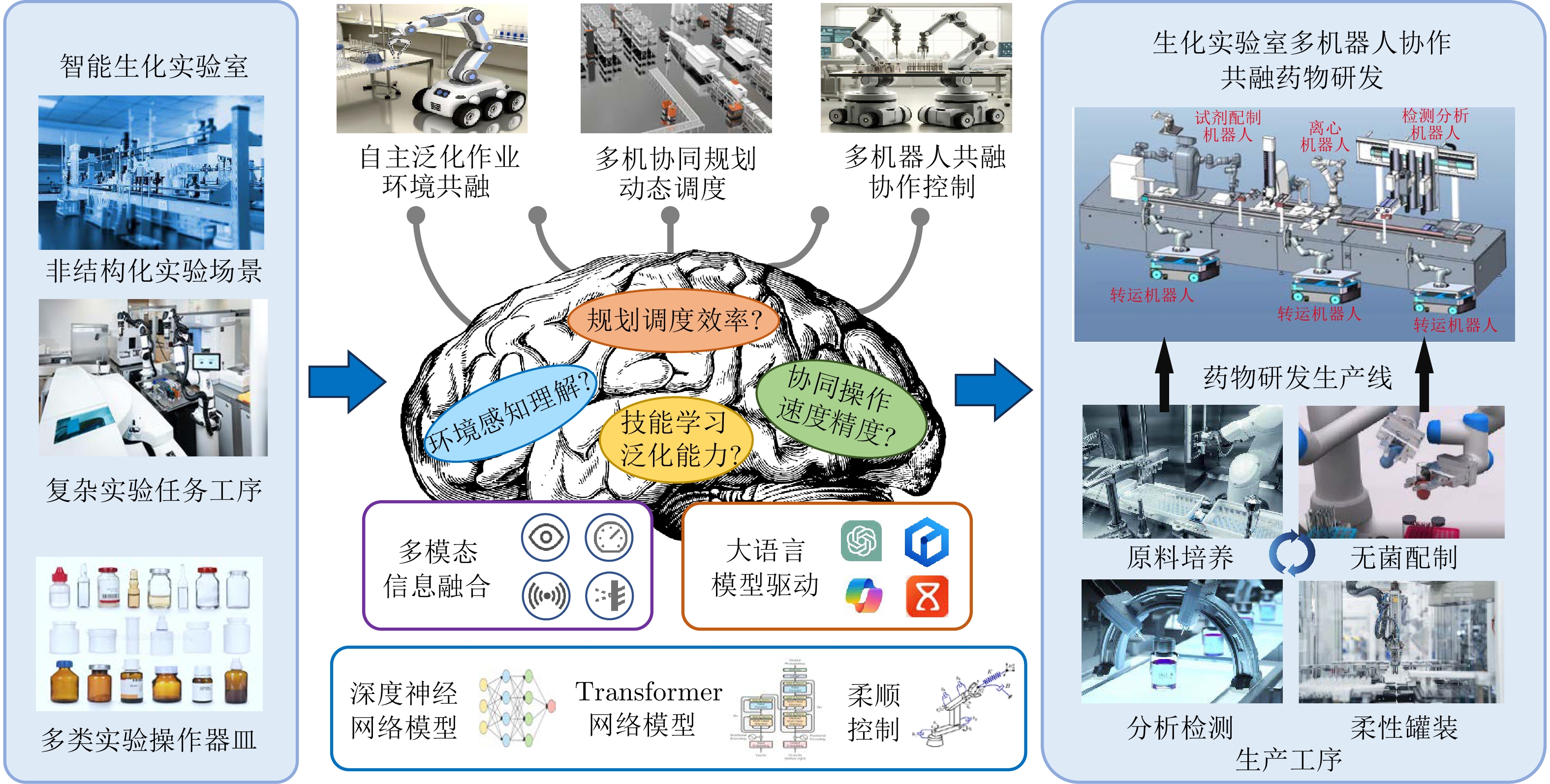
生物制药在保障国计民生和国家安全方面发挥着至关重要的作用, 加快机器人技术、人工智能与生物医学的深度融合, 对于提升新药研发效率、应对公共卫生危机具有重要意义. 在生化实验室中, 随着新药制备流程日益复杂, 机器人技术在高精度液体处理、样品分析和实验自动化等关键操作中发挥着至关重要的作用. 然而, 现有机器人技术在环境感知、协同工作以及动态适应能力等方面仍存在局限性. 近年来, 深度学习、跨模态感知和大模型等领域的快速发展, 使得机器人在复杂生化实验室场景中的应用前景愈加广阔. 本文从智能生化实验室的具体需求出发, 重点探讨机器人在环境感知、任务与运动规划以及协同控制等关键技术方面的最新进展. 随后, 列举在智能生化实验室领域的国内外应用案例, 深入分析机器人技术在实验室环境中的实际应用现状. 最后, 总结智能生化实验室的技术发展趋势及面临的挑战, 为未来研究方向提供参考.
生物制药在保障国计民生和国家安全方面发挥着至关重要的作用, 加快机器人技术、人工智能与生物医学的深度融合, 对于提升新药研发效率、应对公共卫生危机具有重要意义. 在生化实验室中, 随着新药制备流程日益复杂, 机器人技术在高精度液体处理、样品分析和实验自动化等关键操作中发挥着至关重要的作用. 然而, 现有机器人技术在环境感知、协同工作以及动态适应能力等方面仍存在局限性. 近年来, 深度学习、跨模态感知和大模型等领域的快速发展, 使得机器人在复杂生化实验室场景中的应用前景愈加广阔. 本文从智能生化实验室的具体需求出发, 重点探讨机器人在环境感知、任务与运动规划以及协同控制等关键技术方面的最新进展. 随后, 列举在智能生化实验室领域的国内外应用案例, 深入分析机器人技术在实验室环境中的实际应用现状. 最后, 总结智能生化实验室的技术发展趋势及面临的挑战, 为未来研究方向提供参考.


2025, 51(9): 1922-1950.
doi: 10.16383/j.aas.c250417
cstr: 32138.14.j.aas.c250417
摘要:
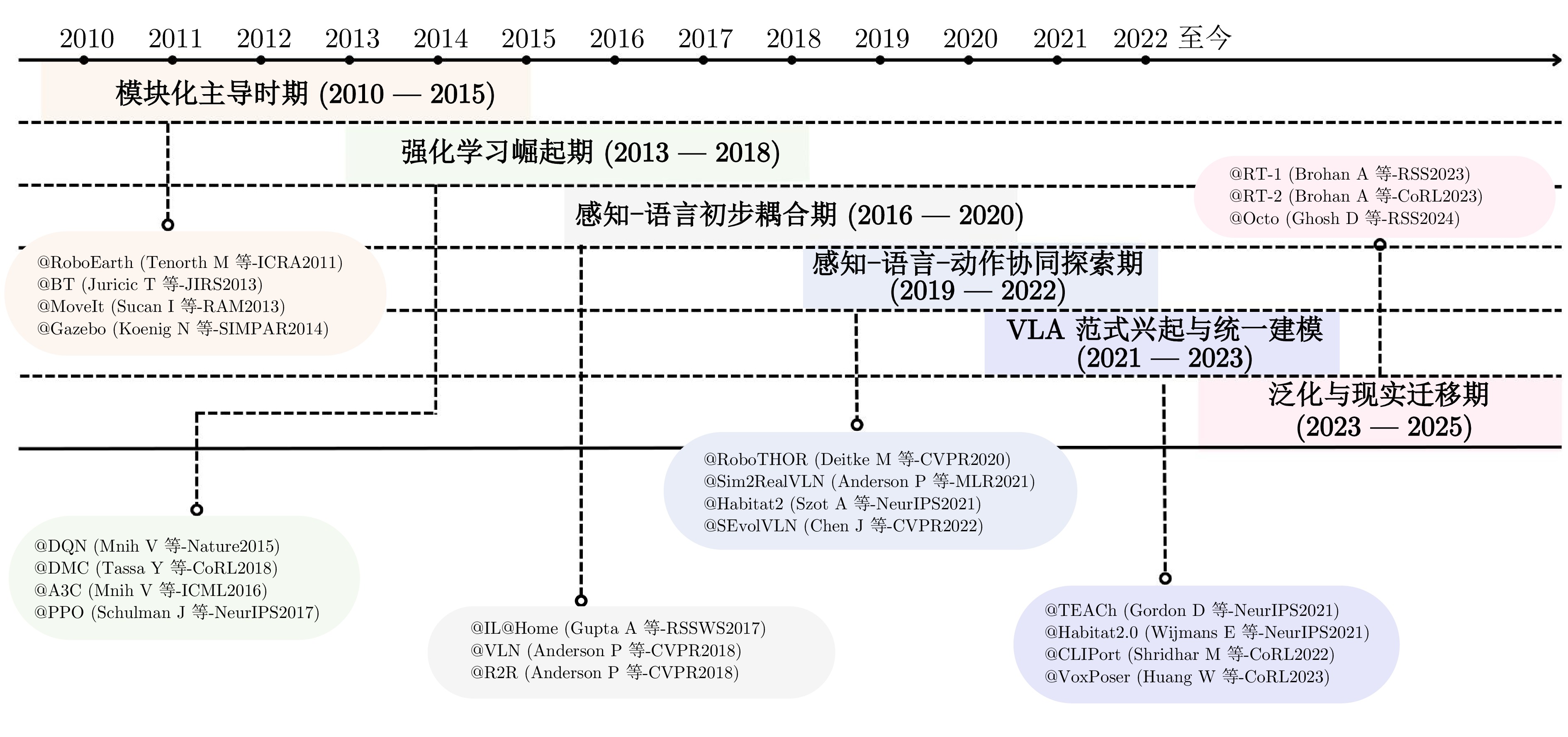
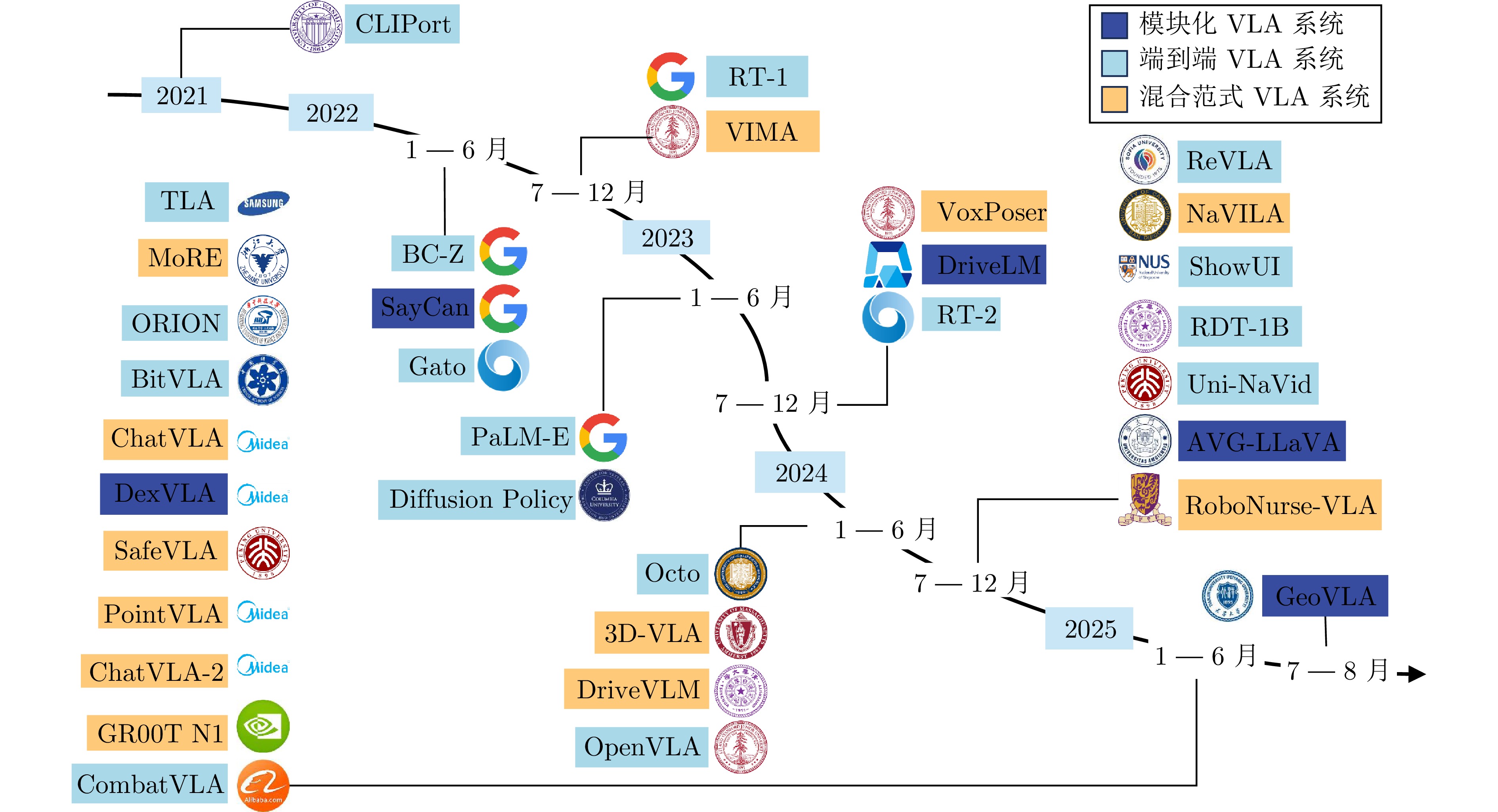
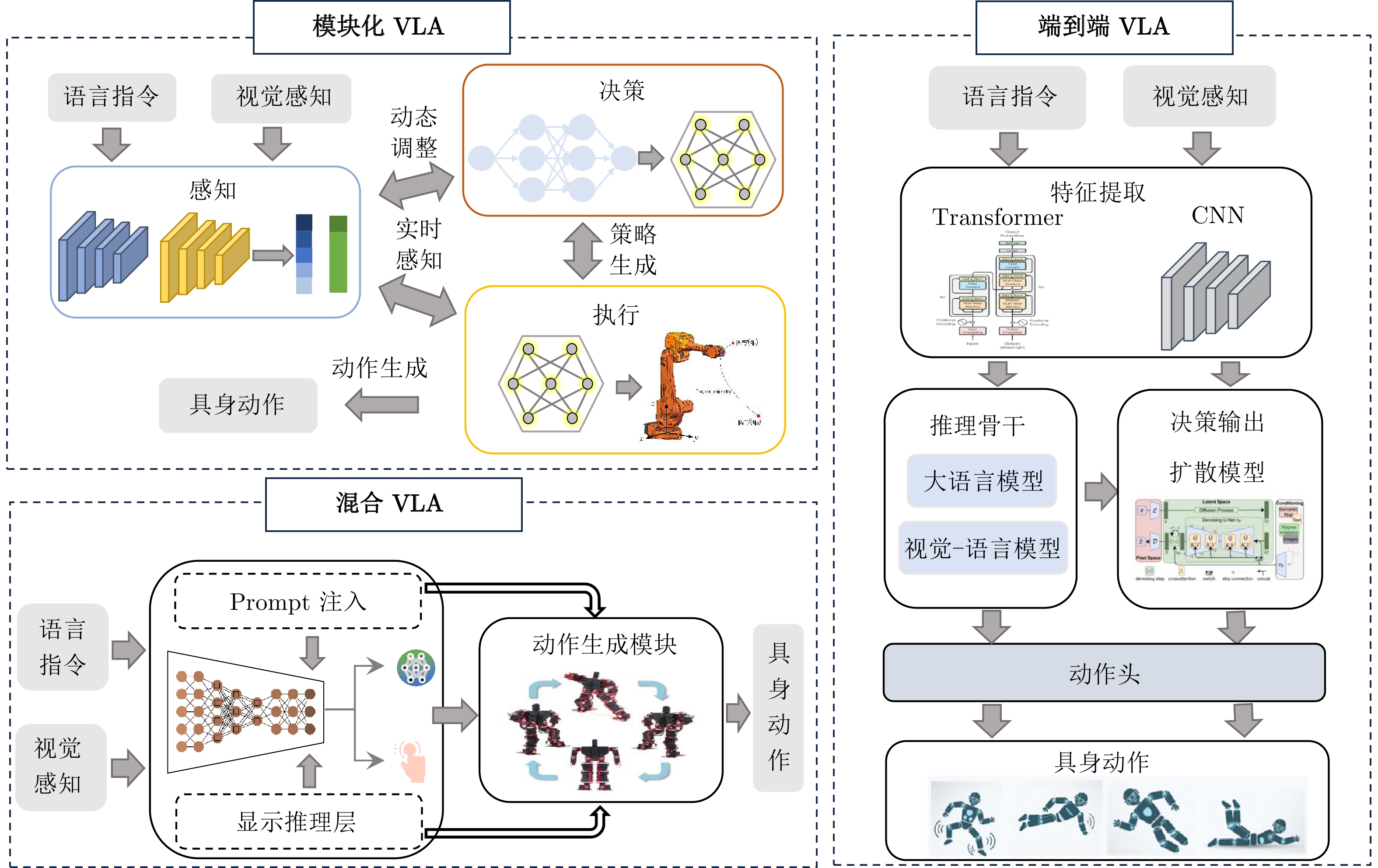
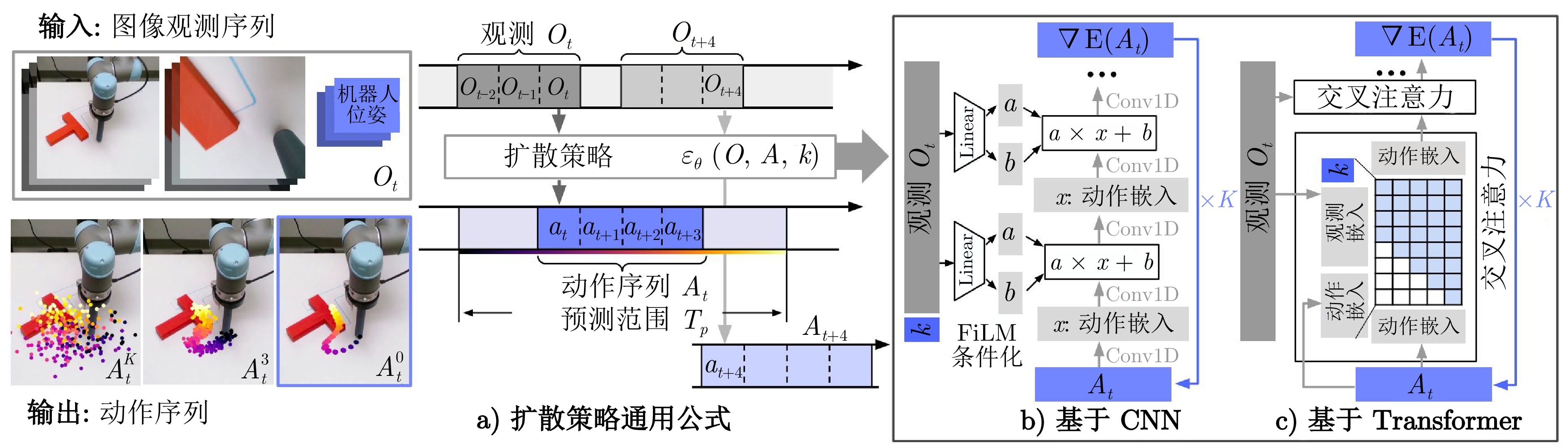
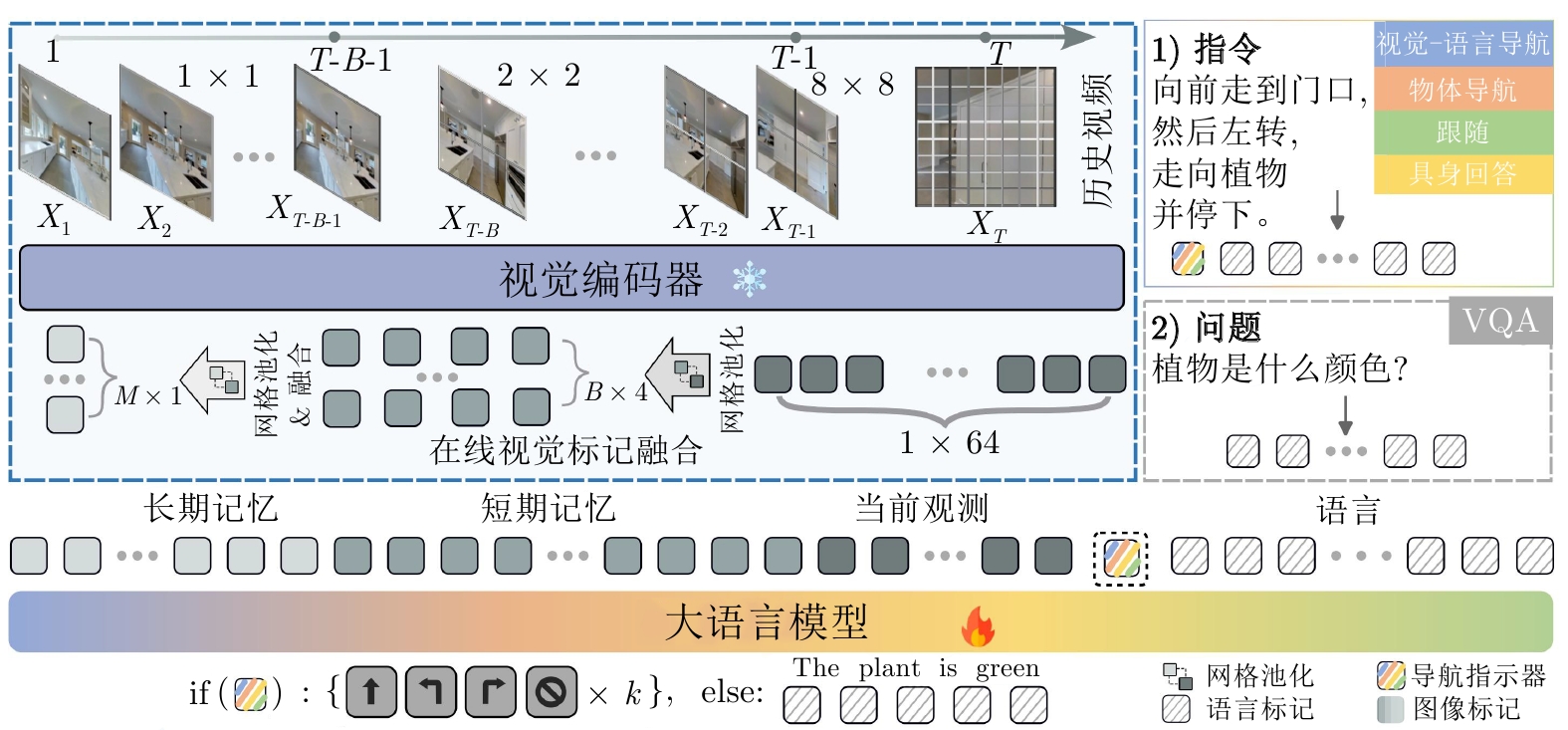
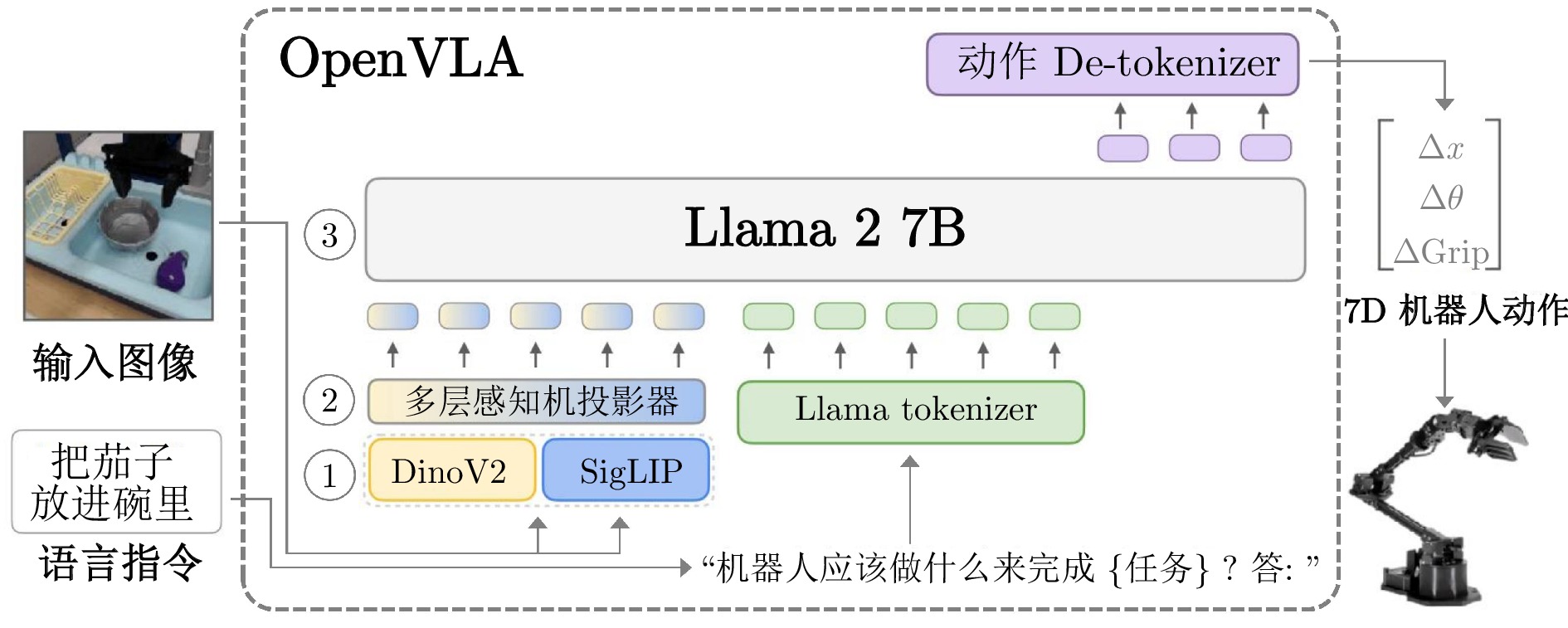
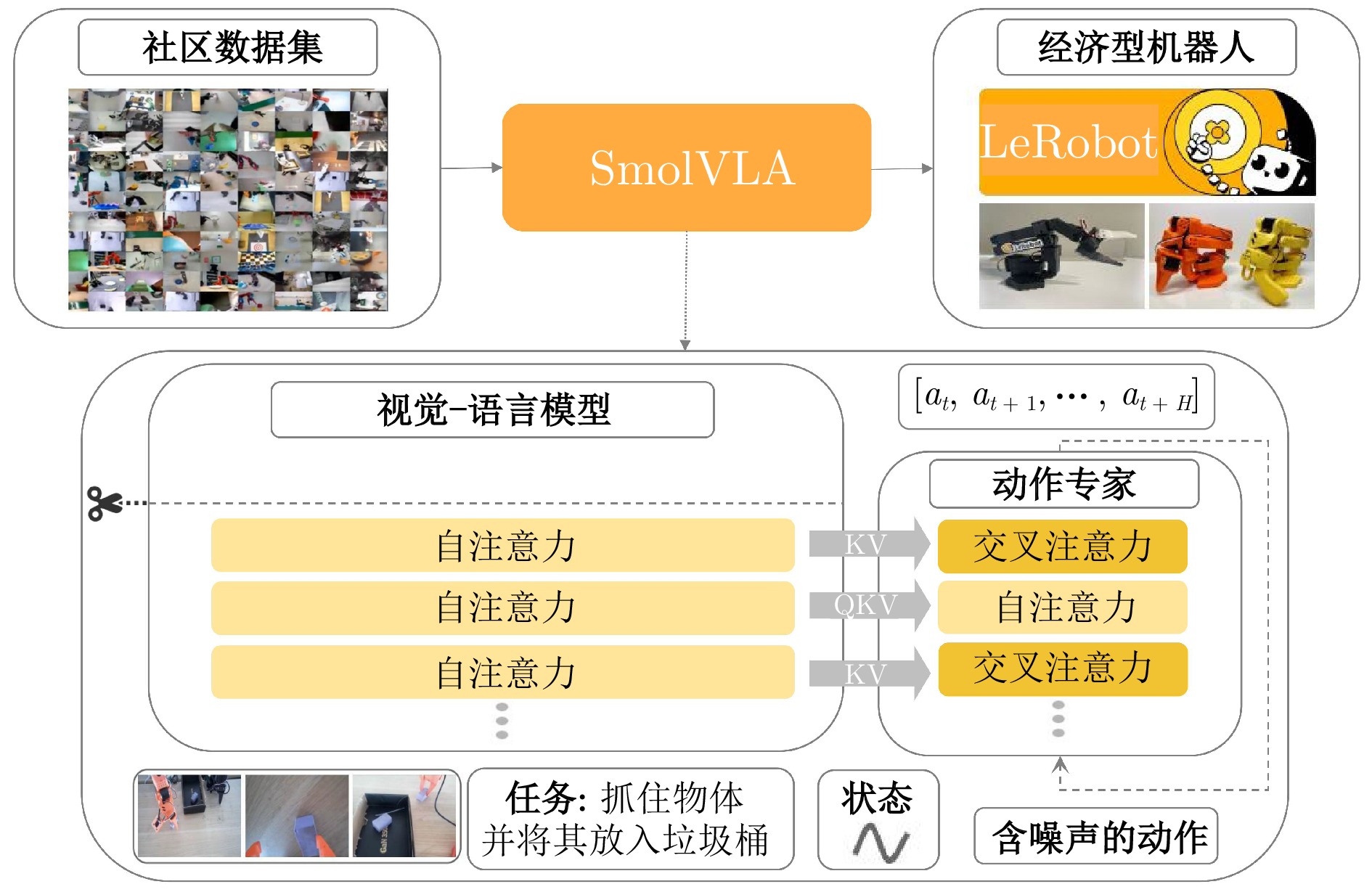
视觉−语言−动作(VLA)模型作为具身智能发展的核心方向, 旨在构建统一的多模态表示与感知–决策–执行一体化架构, 以突破传统模块化系统在功能割裂、语义对齐不足及泛化能力有限等方面的瓶颈. 本文系统回顾前VLA时代的技术积淀, 梳理模块化、端到端和混合三类主流建模范式, 分析其结构特点、能力优势与面临的关键挑战. 在此基础上, 总结当前代表性VLA模型的体系结构、训练机制、多模态融合策略及应用成效, 并对典型数据集与评测基准进行分类比较. 最后, 结合跨模态协同、知识注入、长时序规划与真实环境泛化等方面, 展望未来VLA模型的发展趋势与研究方向.
视觉−语言−动作(VLA)模型作为具身智能发展的核心方向, 旨在构建统一的多模态表示与感知–决策–执行一体化架构, 以突破传统模块化系统在功能割裂、语义对齐不足及泛化能力有限等方面的瓶颈. 本文系统回顾前VLA时代的技术积淀, 梳理模块化、端到端和混合三类主流建模范式, 分析其结构特点、能力优势与面临的关键挑战. 在此基础上, 总结当前代表性VLA模型的体系结构、训练机制、多模态融合策略及应用成效, 并对典型数据集与评测基准进行分类比较. 最后, 结合跨模态协同、知识注入、长时序规划与真实环境泛化等方面, 展望未来VLA模型的发展趋势与研究方向.
2025, 51(9): 1951-1973.
doi: 10.16383/j.aas.c240604
cstr: 32138.14.j.aas.c240604
摘要:
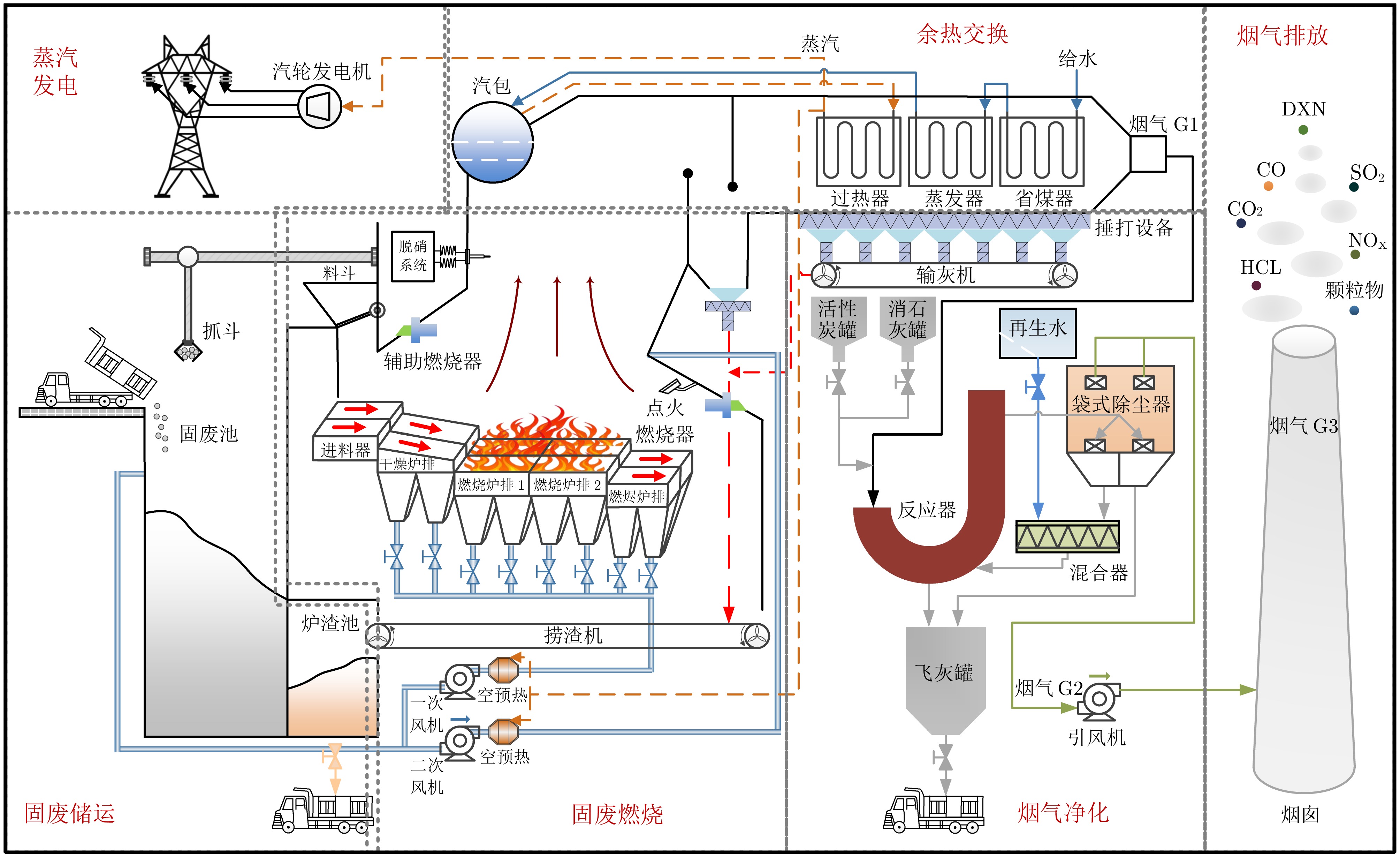
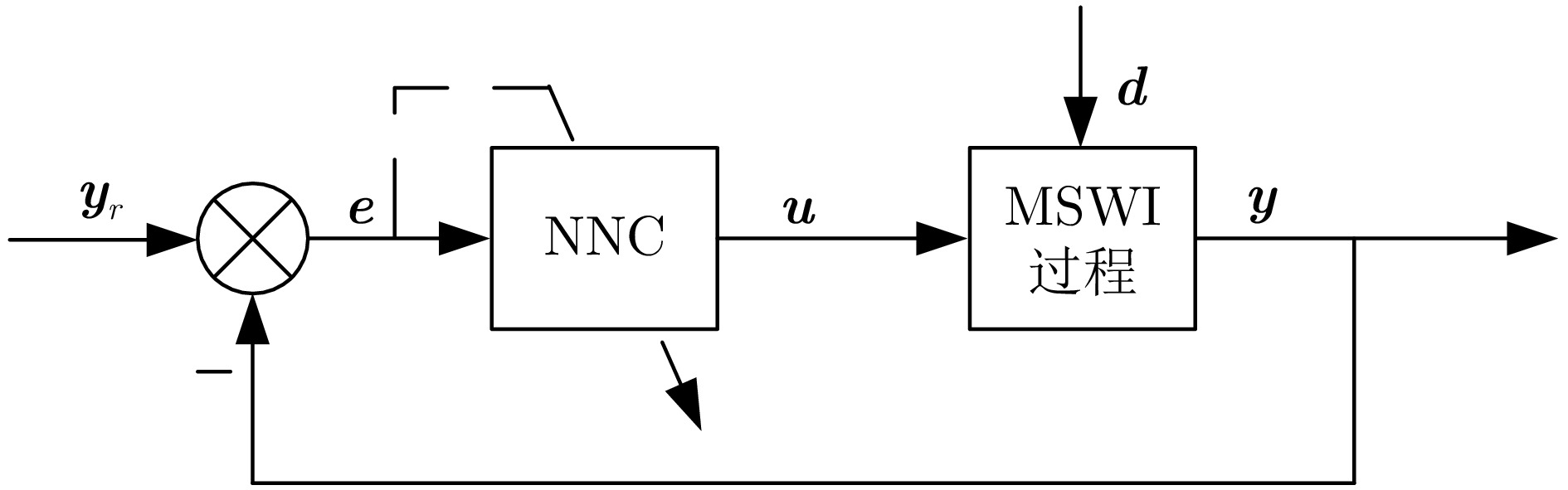
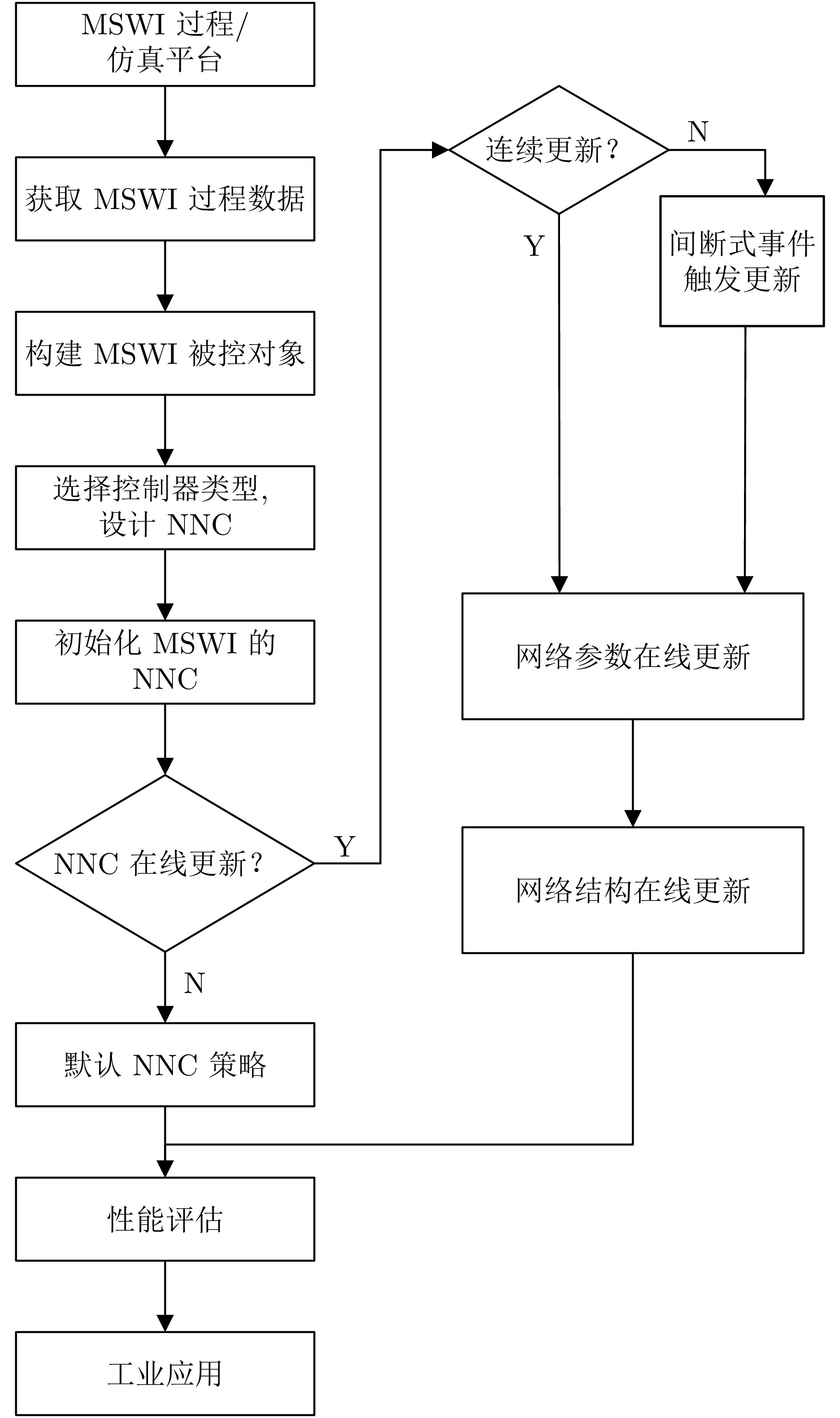
城市固废焚烧(MSWI)已成为解决城市环境问题并实现可再生能源循环利用的主流技术, 其对应系统具有参数多、耦合性强、非线性显著等特性, 需采用先进过程控制技术以确保平稳高效的运行. 鉴于此, 进行面向MSWI过程神经网络控制(NNC)综述以弥补该领域的缺失和促进深入研究. 首先, 描述典型MSWI过程工艺, 分析其控制问题与控制目标, 明确控制复杂性, 概述NNC及其在管理此类复杂系统方面的优势; 其次, 综述面向控制的机理与数据驱动焚烧炉模型; 随后, 简要分析和介绍非NNC控制器设计在MSWI过程的研究现状; 接着, 详细综述面向NNC的浅层和模糊控制器设计、网络参数、网络结构和事件触发在线更新算法以及稳定性分析的研究现状, 并进行控制性能分析; 然后, 展望未来研究方向; 最后, 总结了本文在促进NNC向MSWI过程控制具身智能化发展中的贡献.
城市固废焚烧(MSWI)已成为解决城市环境问题并实现可再生能源循环利用的主流技术, 其对应系统具有参数多、耦合性强、非线性显著等特性, 需采用先进过程控制技术以确保平稳高效的运行. 鉴于此, 进行面向MSWI过程神经网络控制(NNC)综述以弥补该领域的缺失和促进深入研究. 首先, 描述典型MSWI过程工艺, 分析其控制问题与控制目标, 明确控制复杂性, 概述NNC及其在管理此类复杂系统方面的优势; 其次, 综述面向控制的机理与数据驱动焚烧炉模型; 随后, 简要分析和介绍非NNC控制器设计在MSWI过程的研究现状; 接着, 详细综述面向NNC的浅层和模糊控制器设计、网络参数、网络结构和事件触发在线更新算法以及稳定性分析的研究现状, 并进行控制性能分析; 然后, 展望未来研究方向; 最后, 总结了本文在促进NNC向MSWI过程控制具身智能化发展中的贡献.
2025, 51(9): 1974-1987.
doi: 10.16383/j.aas.c240530
cstr: 32138.14.j.aas.c240530
摘要:
多智能体系统是分布式人工智能的重要分支, 通过智能体之间的交互与协作完成复杂的任务. 一致性是协同控制的核心问题, 二分一致性作为一致性的延伸受到了广泛关注. 首先, 介绍一些符号图知识, 给出一阶、二阶、高阶及分数阶多智能体系统的模型及一些二分一致性的定义. 其次, 概述这四类多智能体系统多种二分一致性的研究进展. 此外, 分析有限时间、固定时间和预设时间二分一致性的优势及保守性, 讨论二分一致性和二分输出一致性的特点. 最后, 对多智能体系统二分一致性进行总结与展望.
多智能体系统是分布式人工智能的重要分支, 通过智能体之间的交互与协作完成复杂的任务. 一致性是协同控制的核心问题, 二分一致性作为一致性的延伸受到了广泛关注. 首先, 介绍一些符号图知识, 给出一阶、二阶、高阶及分数阶多智能体系统的模型及一些二分一致性的定义. 其次, 概述这四类多智能体系统多种二分一致性的研究进展. 此外, 分析有限时间、固定时间和预设时间二分一致性的优势及保守性, 讨论二分一致性和二分输出一致性的特点. 最后, 对多智能体系统二分一致性进行总结与展望.
2025, 51(9): 1988-2000.
doi: 10.16383/j.aas.c240705
cstr: 32138.14.j.aas.c240705
摘要:
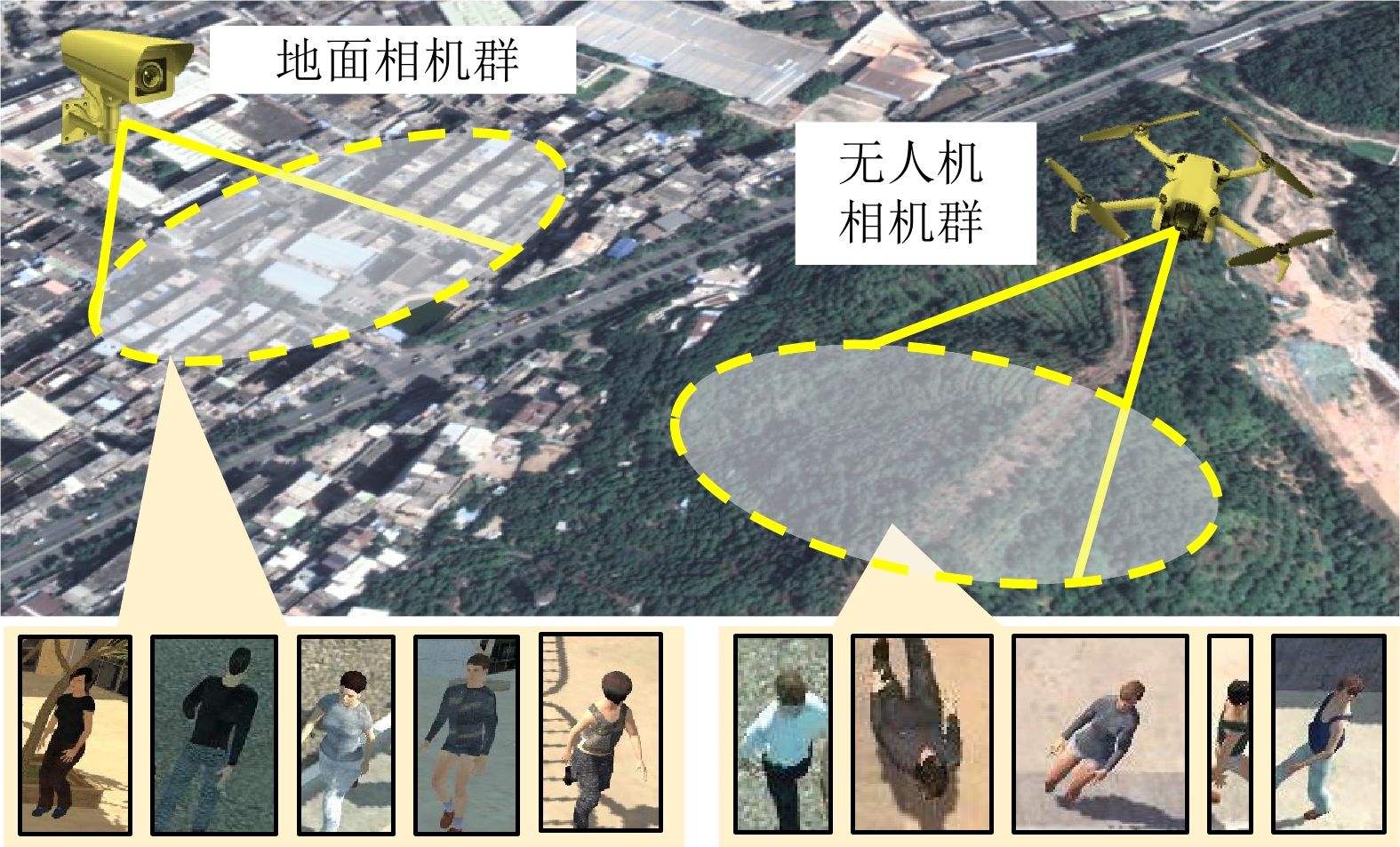
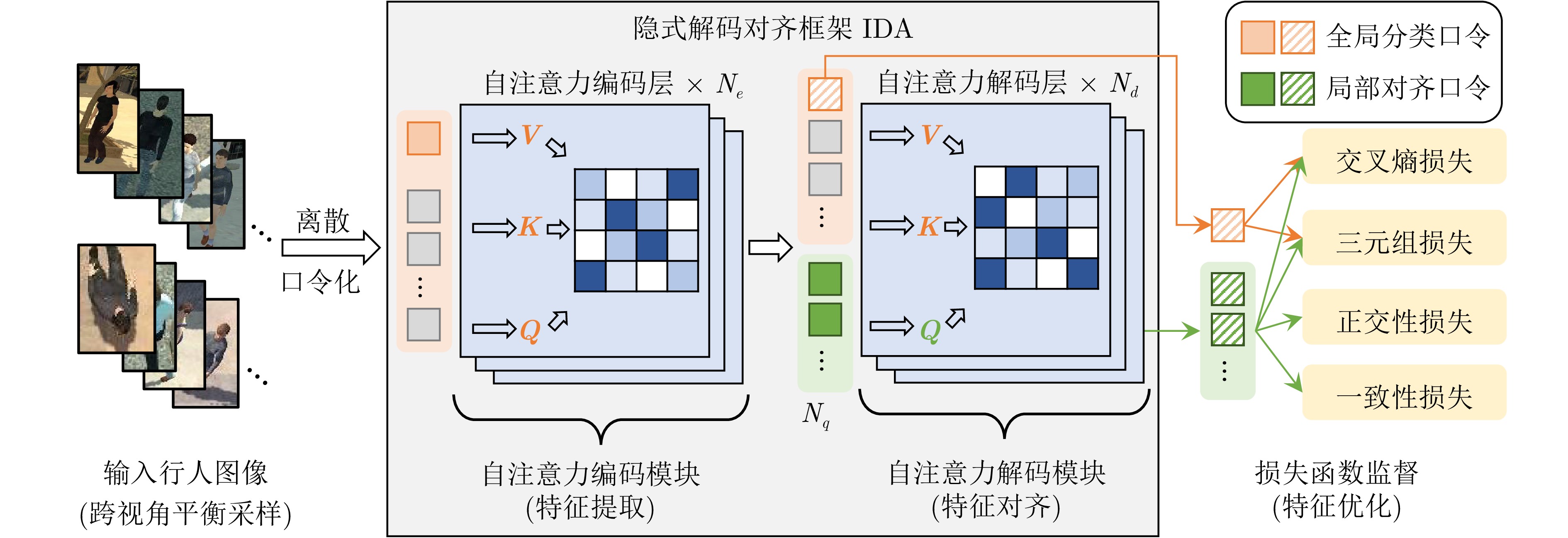
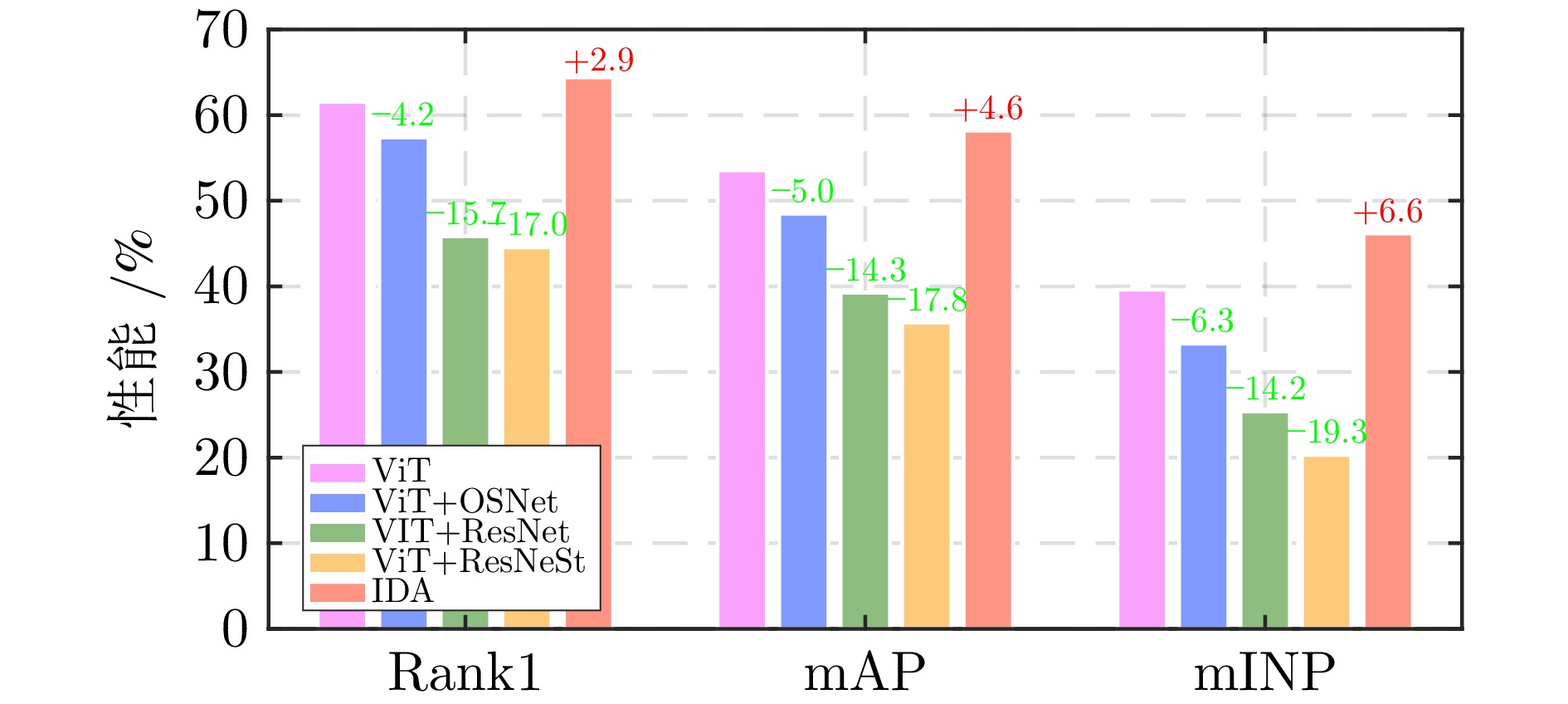
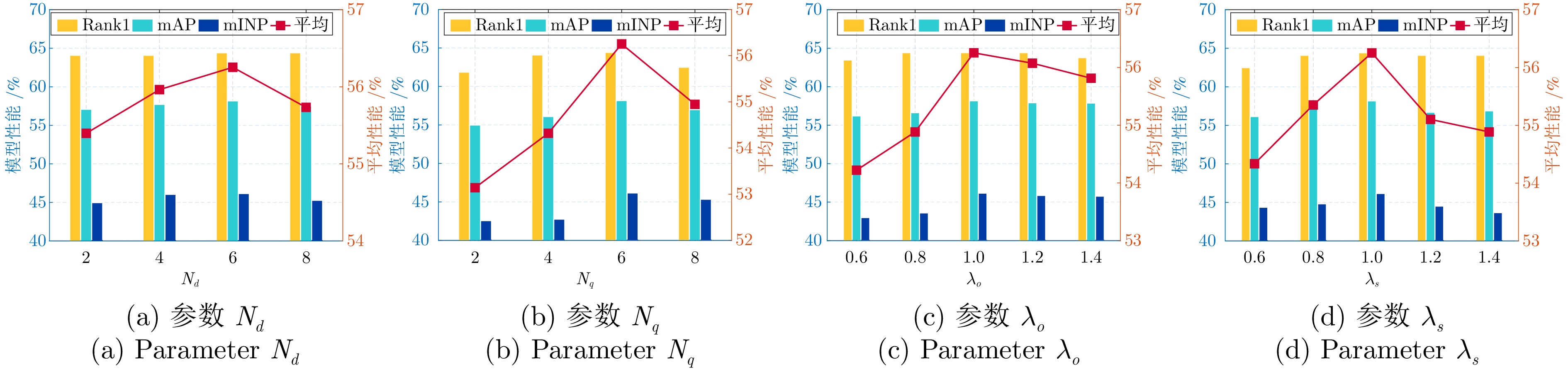
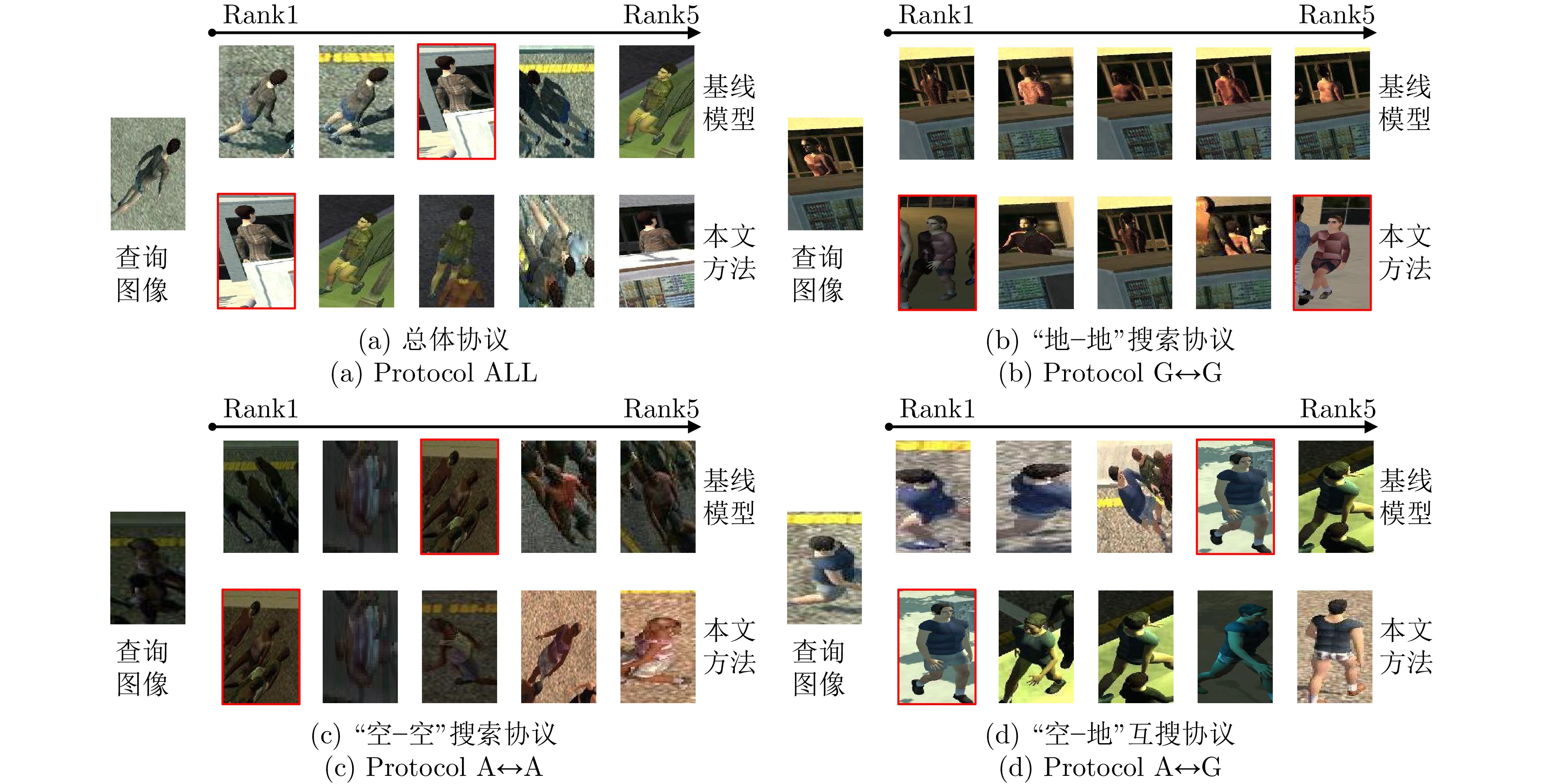
空地行人重识别任务旨在包含地面与空中视角的监控相机网络中, 实现对特定行人的精确识别与跨镜关联. 该任务的特有挑战在于克服空地成像设备之间巨大的视角差异对于学习判别性行人身份特征的干扰. 现有工作在行人特征建模方面存在不足, 未充分考虑跨视角特征对齐对识别与检索性能的提升作用. 基于此, 提出一种基于隐式解码对齐的空地行人重识别方法, 主要包含两方面的创新: 在模型设计方面, 提出基于自注意力解码器的隐式对齐框架, 通过在解码阶段利用一组可学习的口令特征挖掘行人判别部件区域, 并提取和对齐行人局部特征, 从而实现判别性行人表征的学习; 在优化目标方面, 提出正交性和一致性损失函数, 前者约束口令特征以多样化判别性行人部件为关注点, 后者缓解了跨视角特征表达的偏置分布. 在当前可用的最大空地重识别数据集CARGO上进行实验, 结果表明所提方法在检索性能上优于现有重识别方法, 实现显著的性能提升.
空地行人重识别任务旨在包含地面与空中视角的监控相机网络中, 实现对特定行人的精确识别与跨镜关联. 该任务的特有挑战在于克服空地成像设备之间巨大的视角差异对于学习判别性行人身份特征的干扰. 现有工作在行人特征建模方面存在不足, 未充分考虑跨视角特征对齐对识别与检索性能的提升作用. 基于此, 提出一种基于隐式解码对齐的空地行人重识别方法, 主要包含两方面的创新: 在模型设计方面, 提出基于自注意力解码器的隐式对齐框架, 通过在解码阶段利用一组可学习的口令特征挖掘行人判别部件区域, 并提取和对齐行人局部特征, 从而实现判别性行人表征的学习; 在优化目标方面, 提出正交性和一致性损失函数, 前者约束口令特征以多样化判别性行人部件为关注点, 后者缓解了跨视角特征表达的偏置分布. 在当前可用的最大空地重识别数据集CARGO上进行实验, 结果表明所提方法在检索性能上优于现有重识别方法, 实现显著的性能提升.
2025, 51(9): 2001-2010.
doi: 10.16383/j.aas.c240789
cstr: 32138.14.j.aas.c240789
摘要:
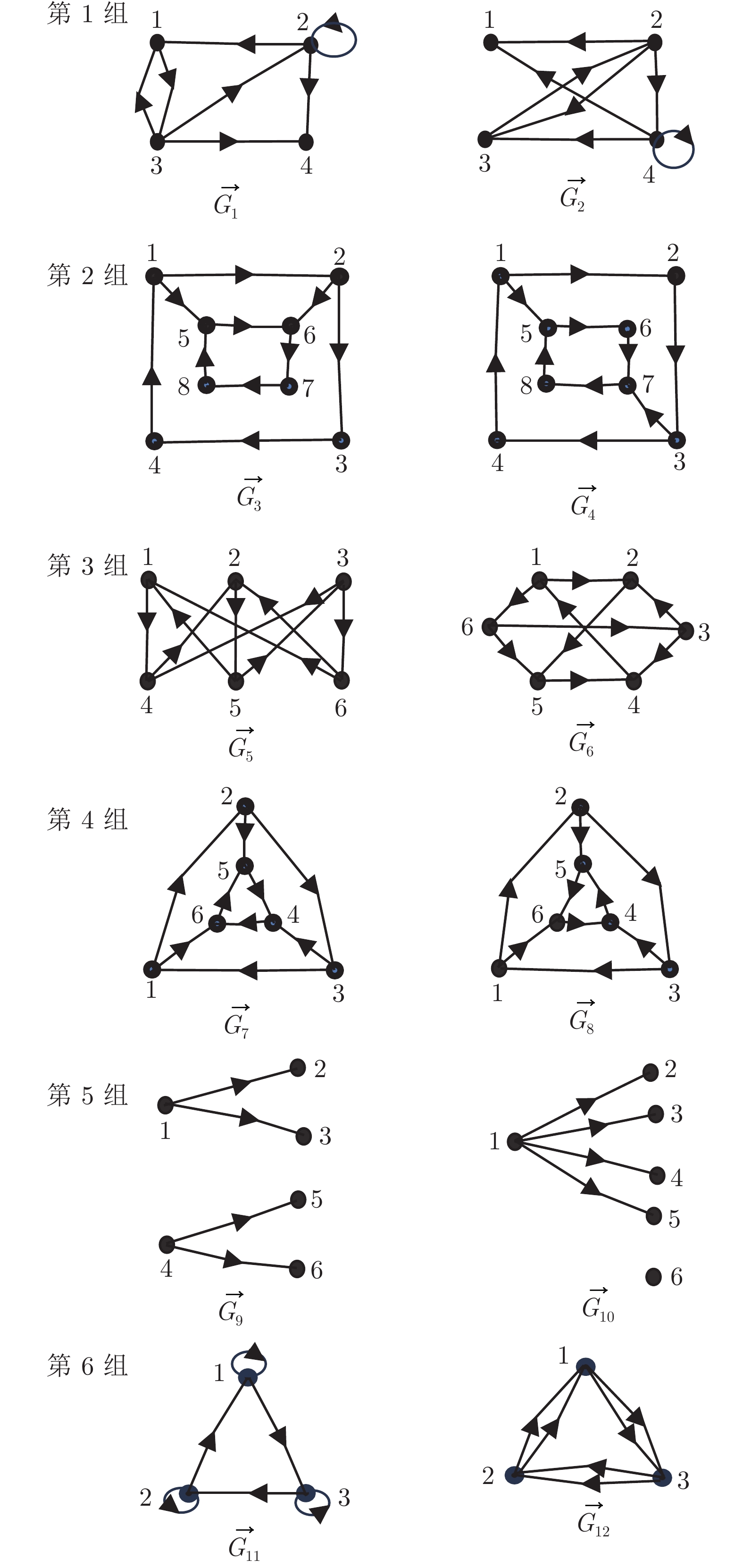
基于有向图的邻接矩阵和距离矩阵, 提出有向图顶点度集、距离谱与距离和集的定义, 将基于邻接矩阵的同构判定条件推广到简单有向图的距离矩阵. 在此基础上, 给出两个简单有向图的同构性判据, 这两个判据均可判定任意两个简单有向图是否同构; 给出复杂有向图的同构性判据, 该判据可判定任意两个复杂有向图是否同构. 上述三个判据均是充要条件且均具有多项式时间复杂度.
基于有向图的邻接矩阵和距离矩阵, 提出有向图顶点度集、距离谱与距离和集的定义, 将基于邻接矩阵的同构判定条件推广到简单有向图的距离矩阵. 在此基础上, 给出两个简单有向图的同构性判据, 这两个判据均可判定任意两个简单有向图是否同构; 给出复杂有向图的同构性判据, 该判据可判定任意两个复杂有向图是否同构. 上述三个判据均是充要条件且均具有多项式时间复杂度.
2025, 51(9): 2011-2026.
doi: 10.16383/j.aas.c240262
cstr: 32138.14.j.aas.c240262
摘要:
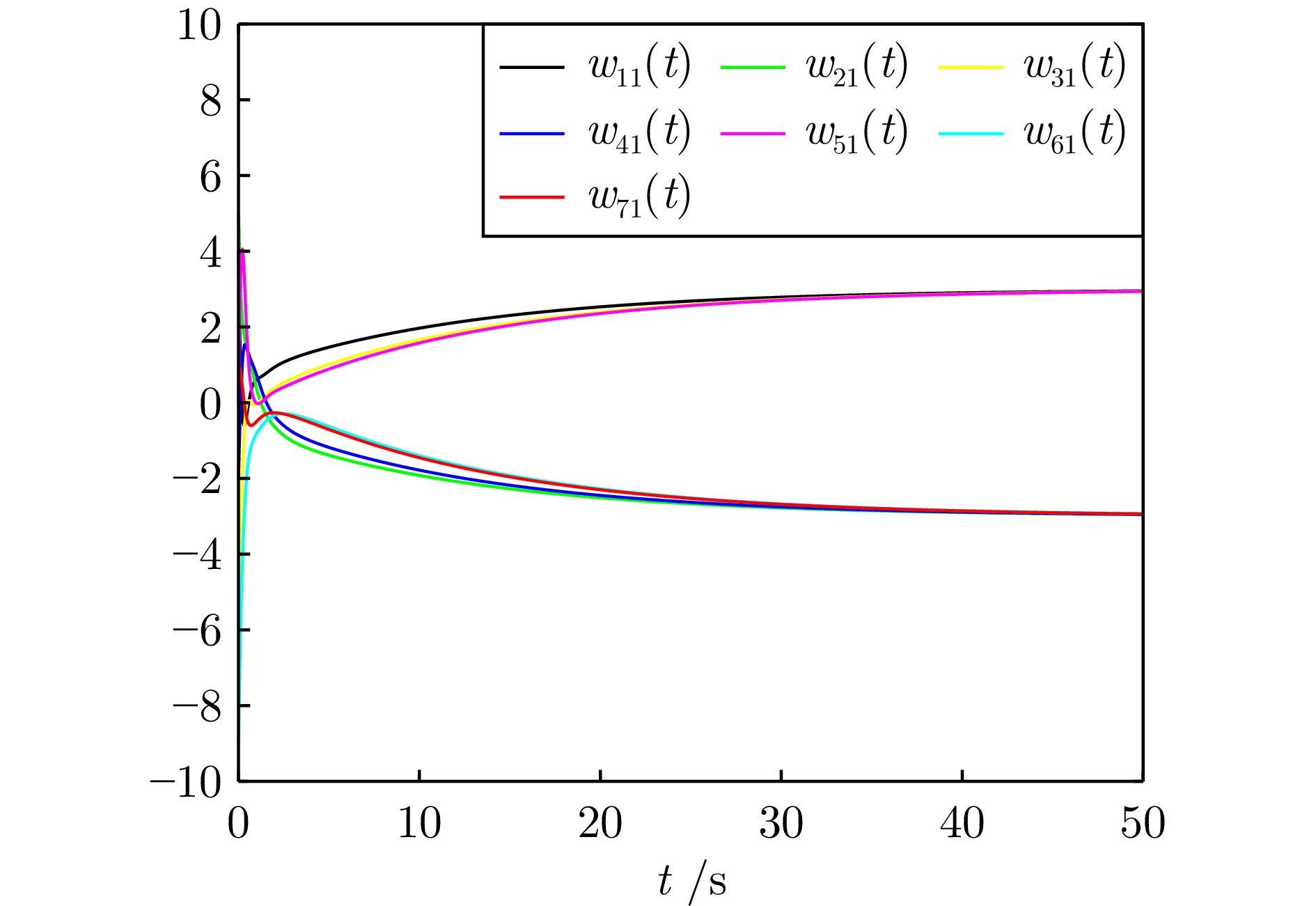
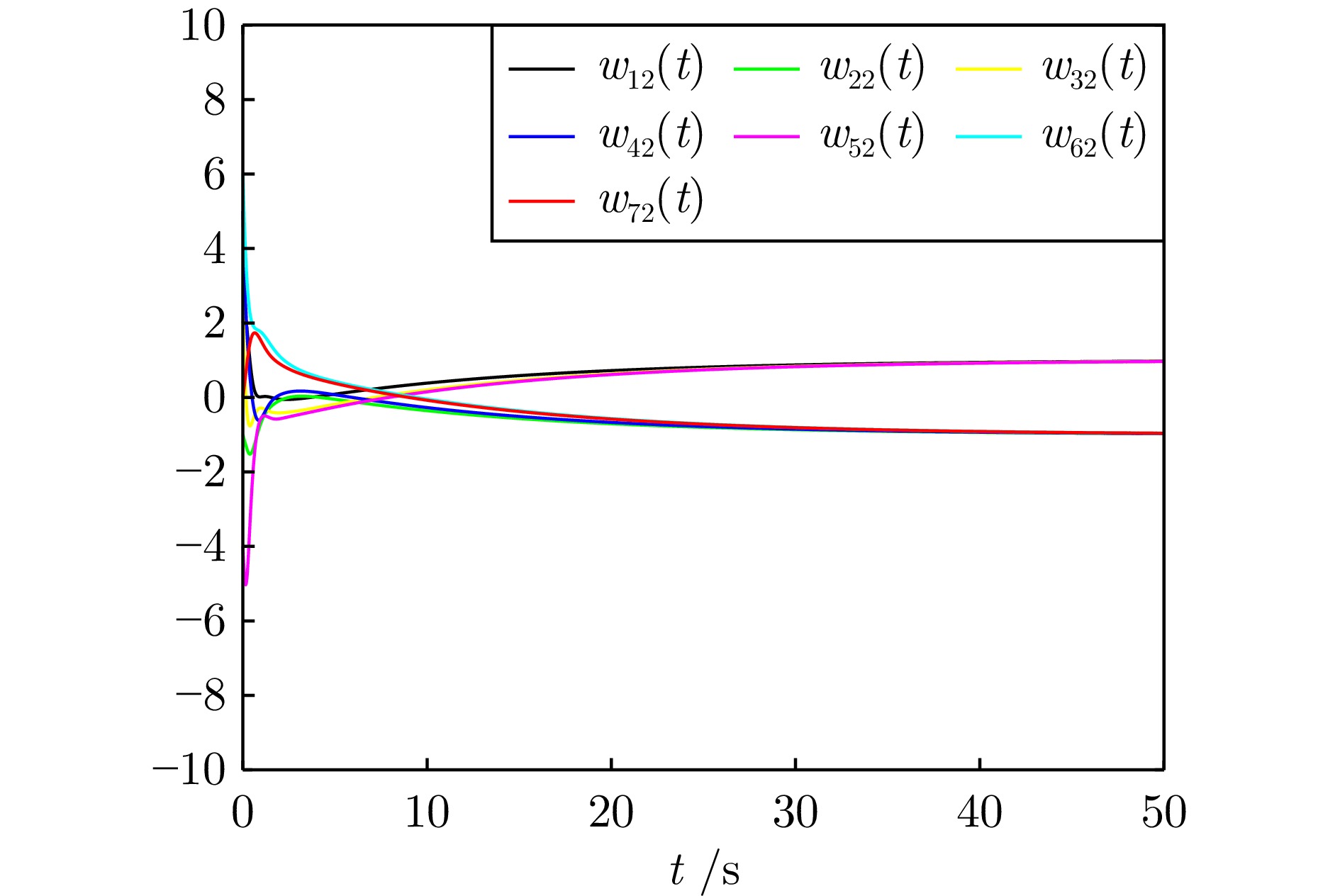
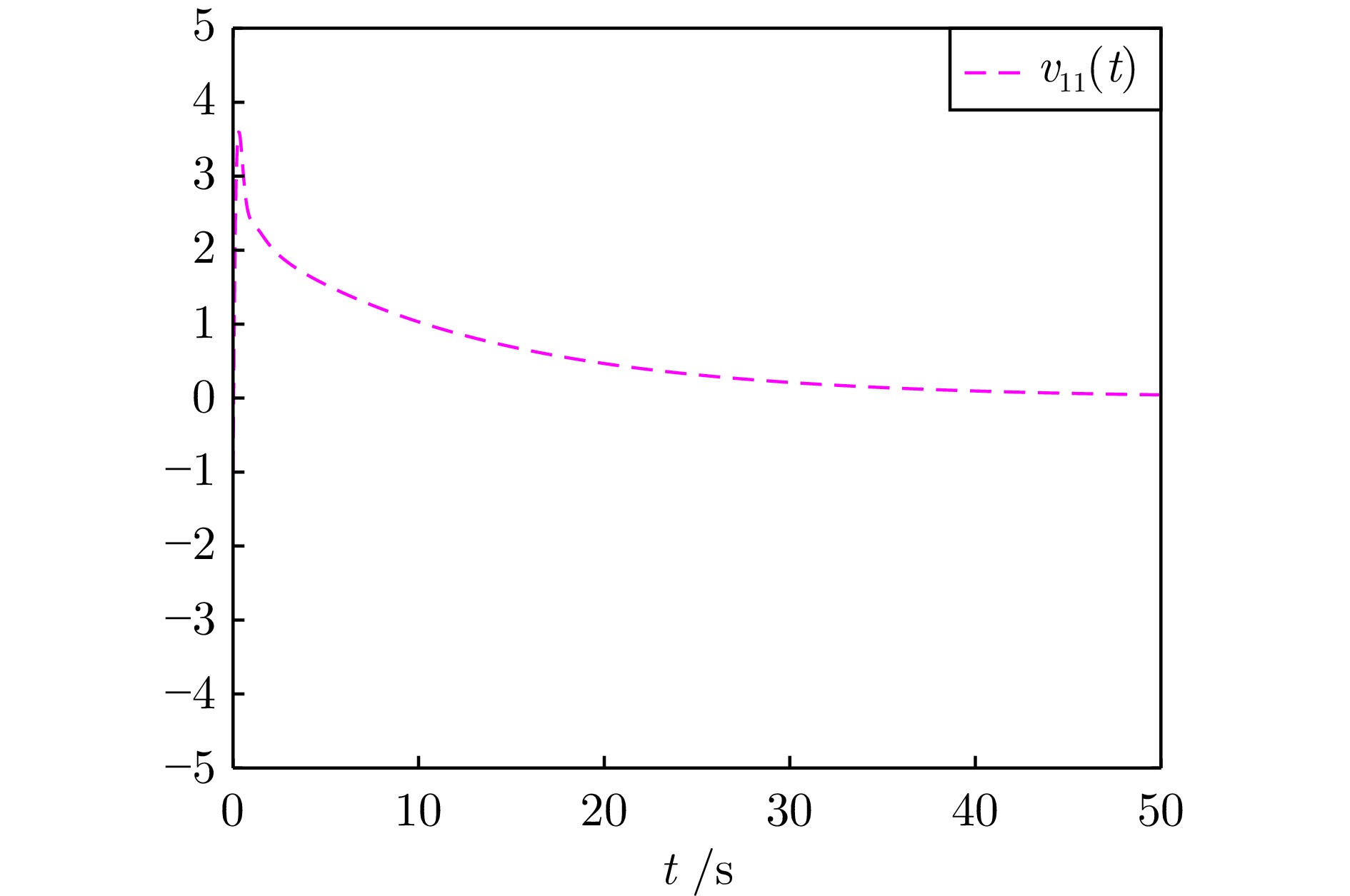
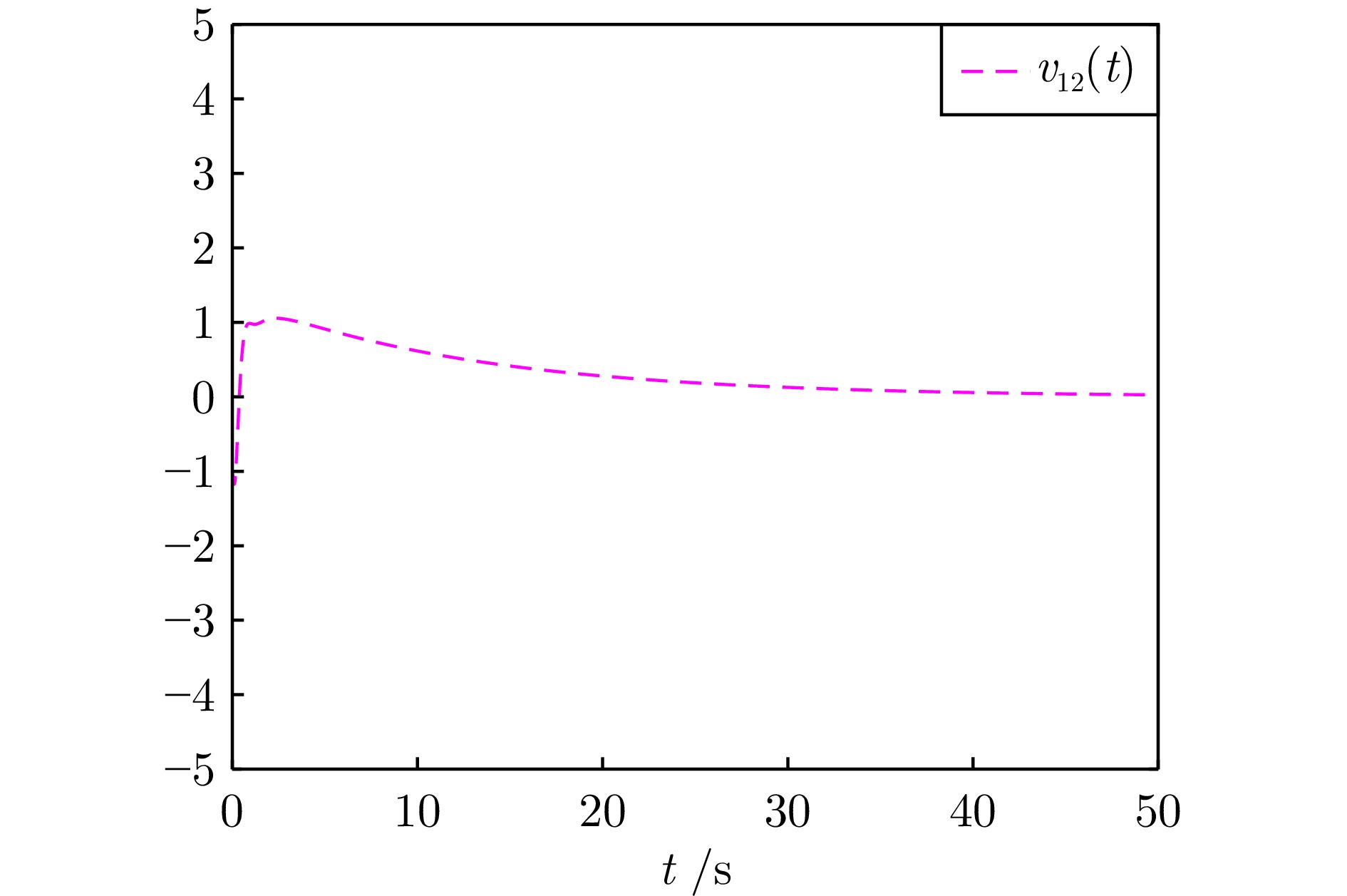
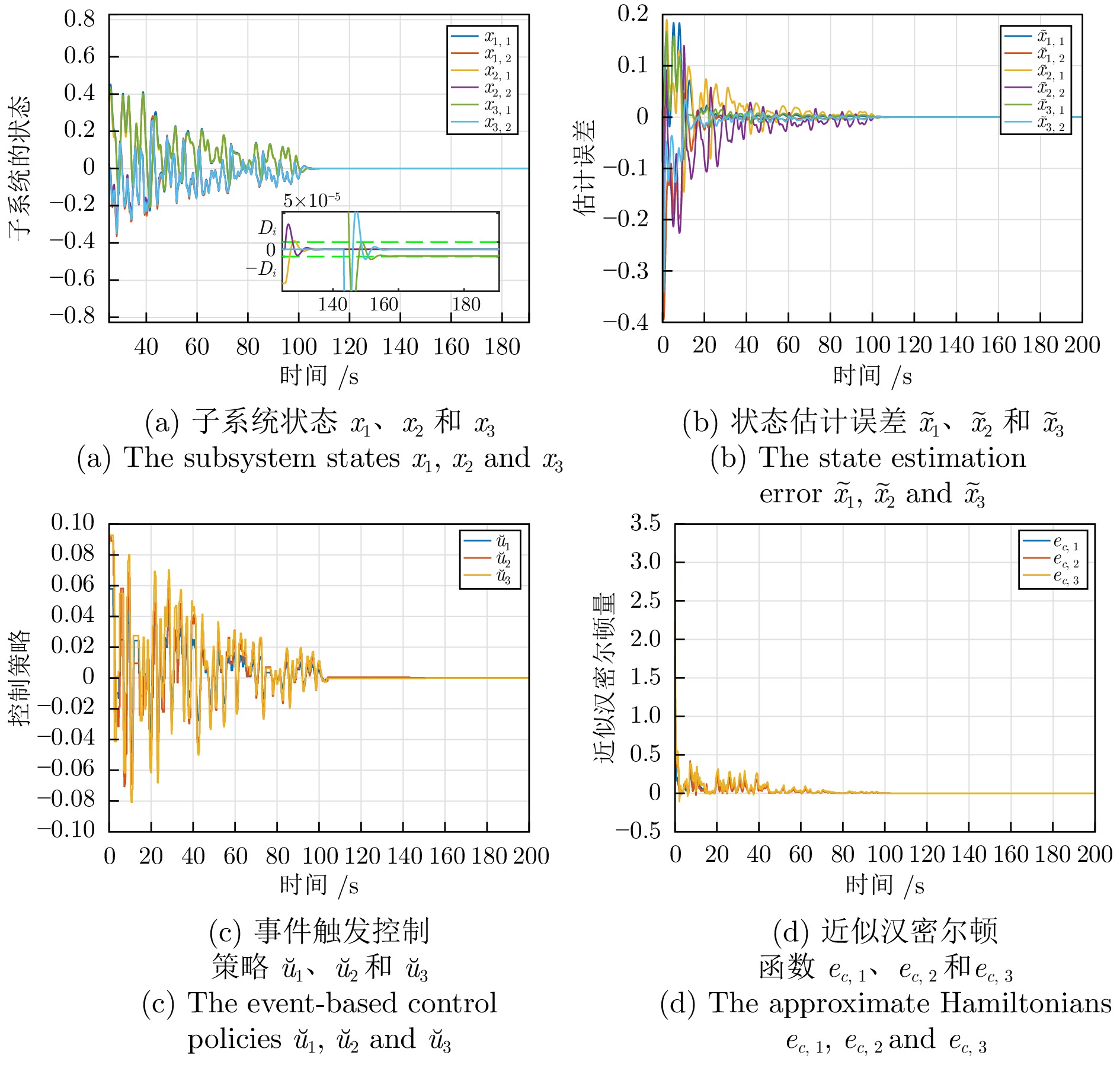
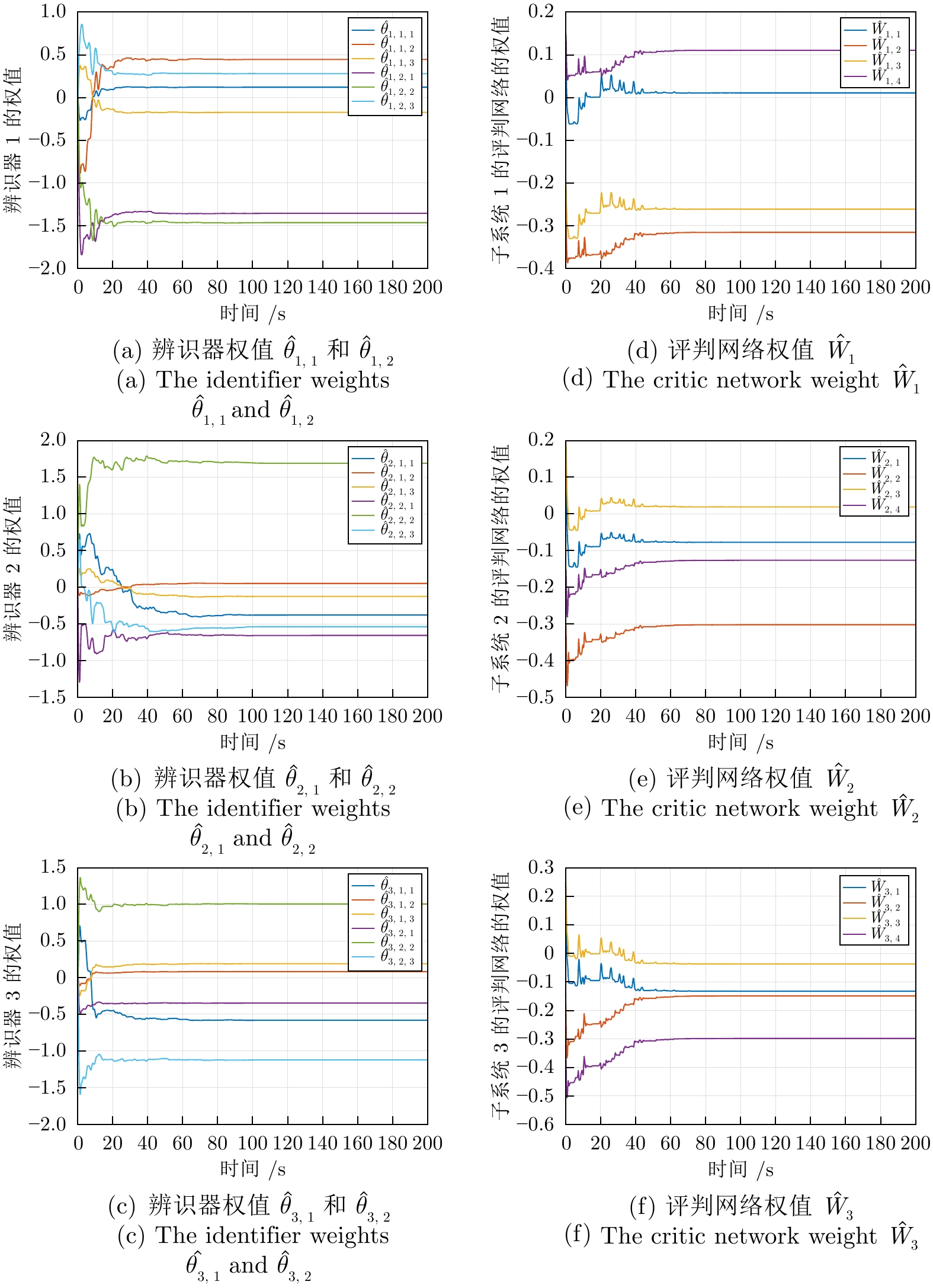
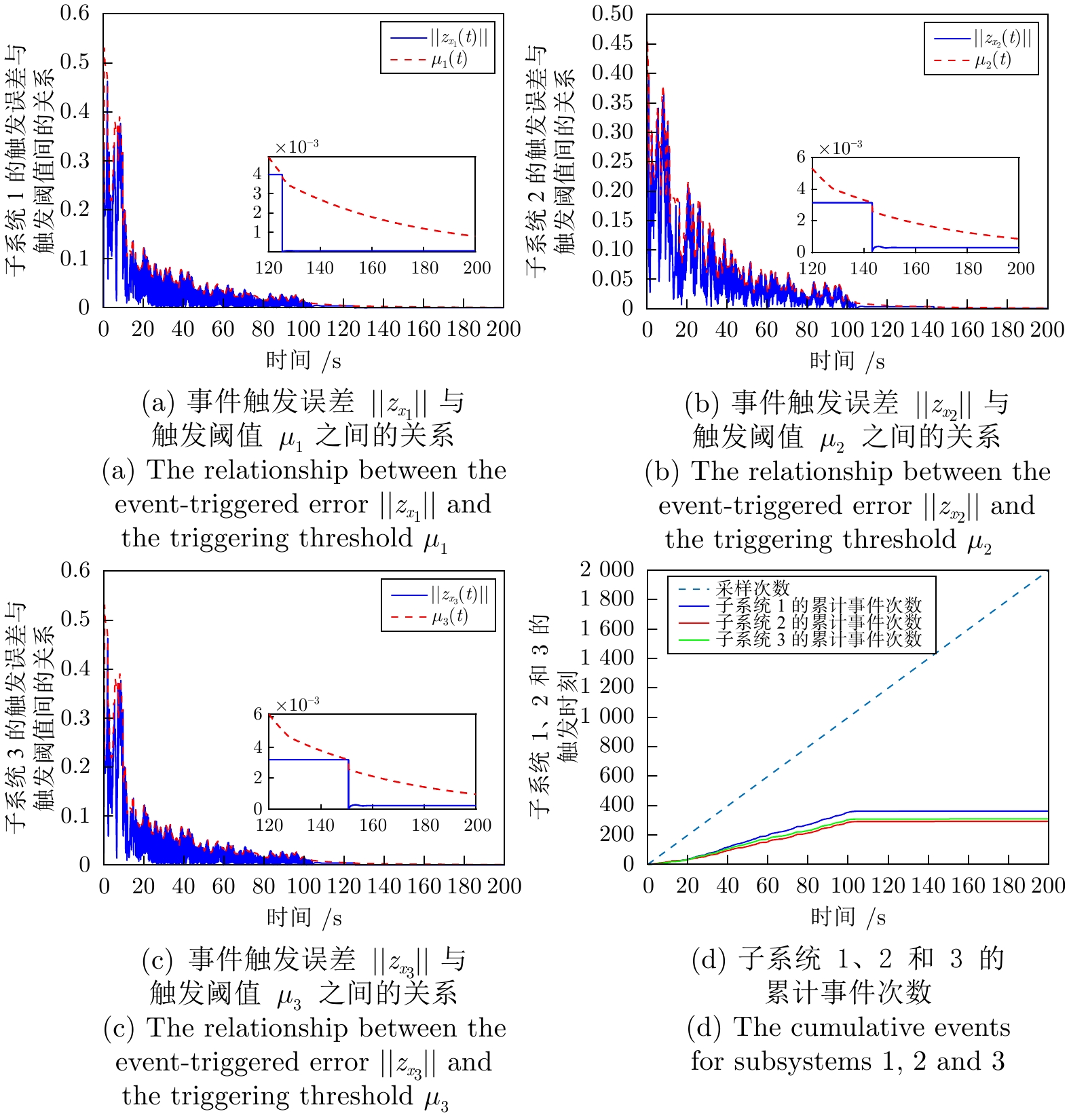
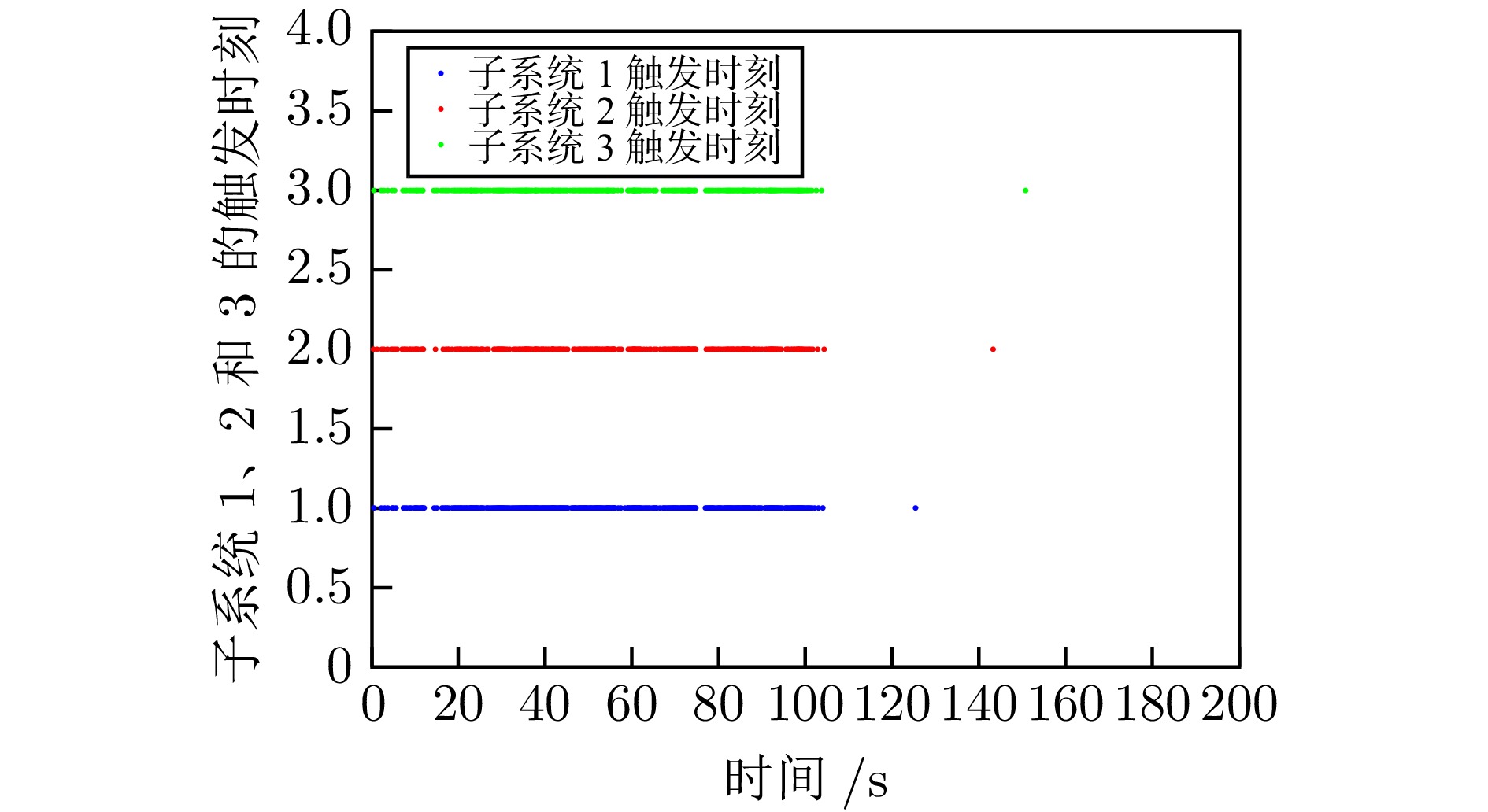
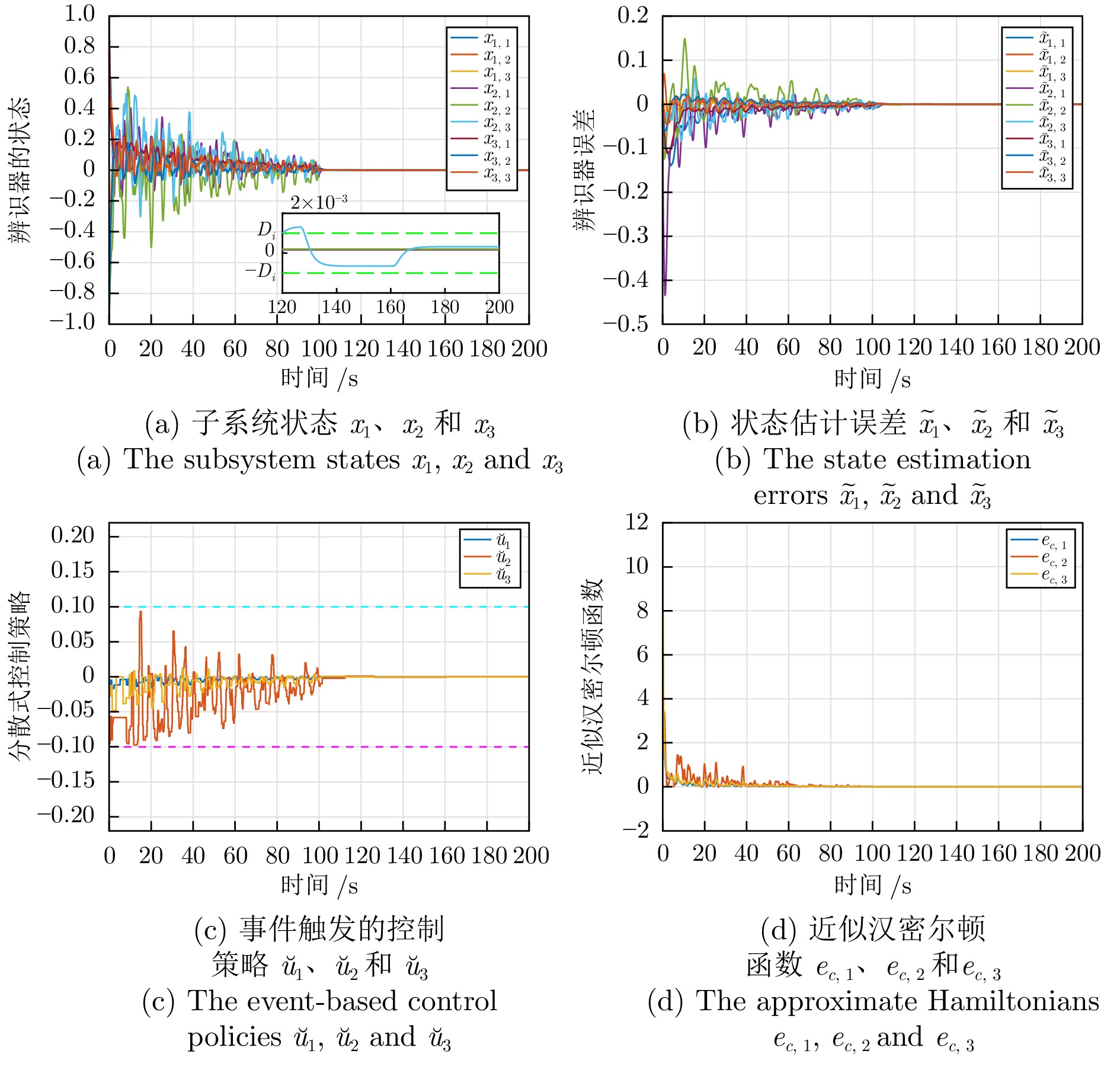
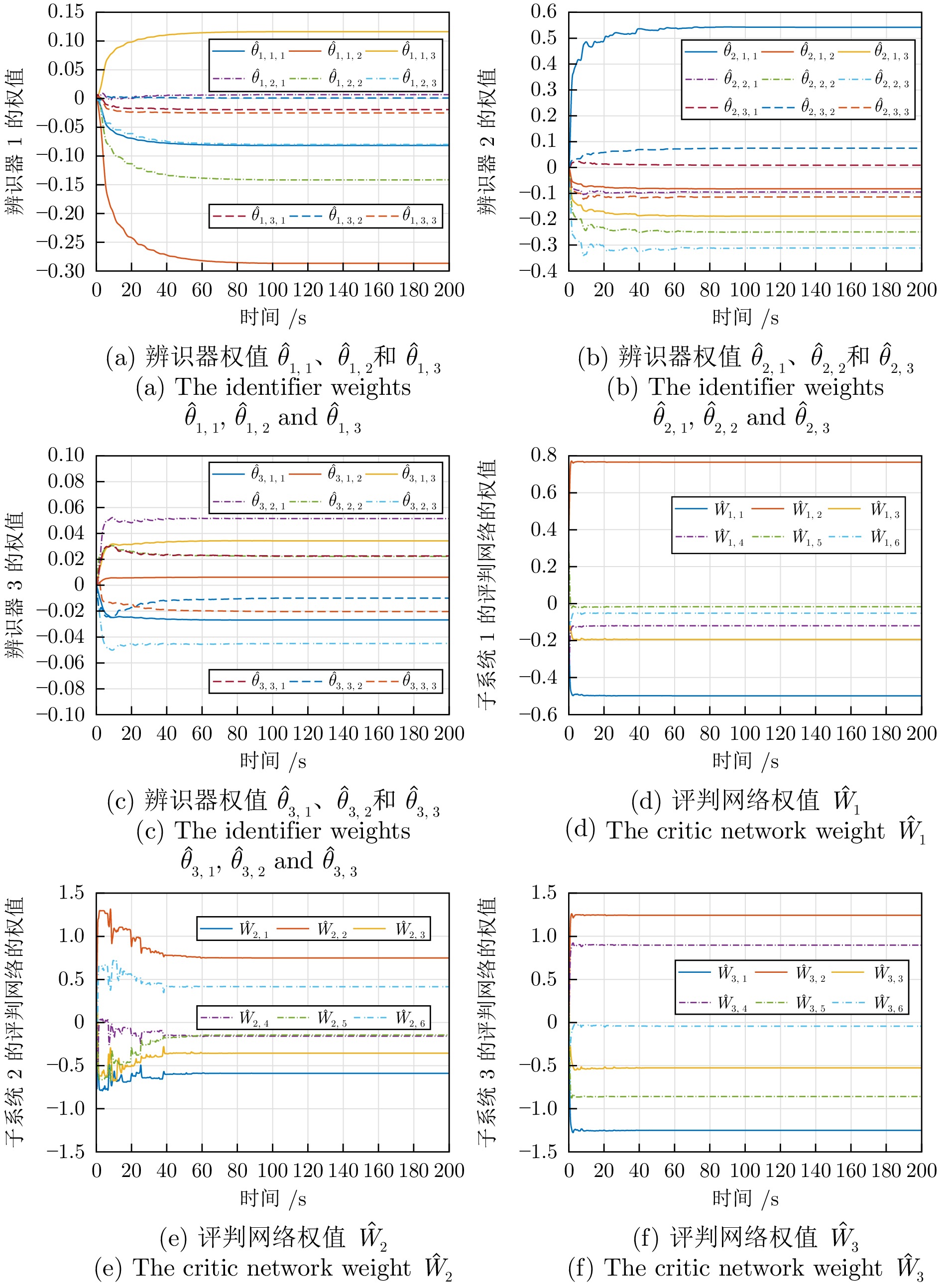
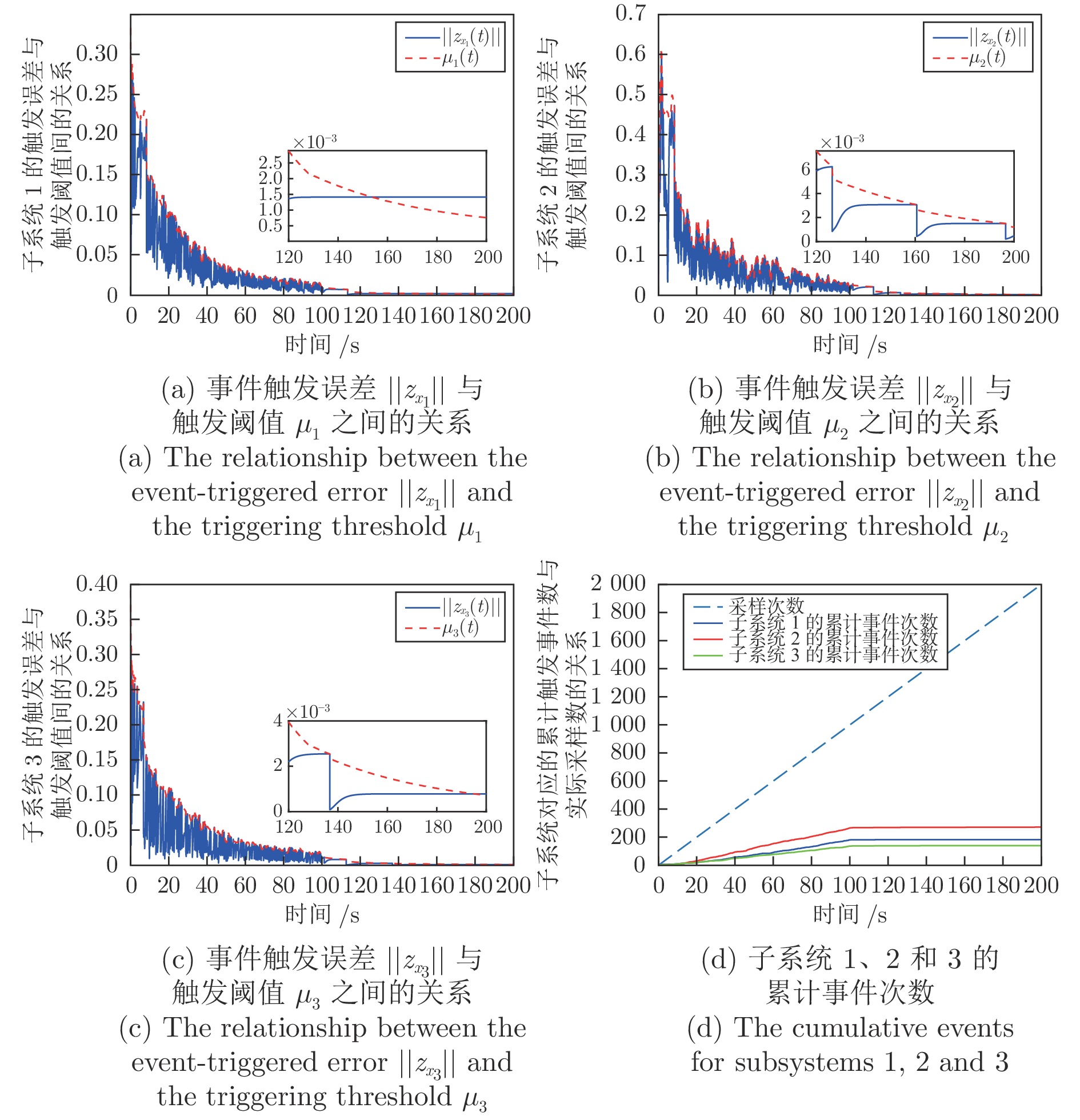
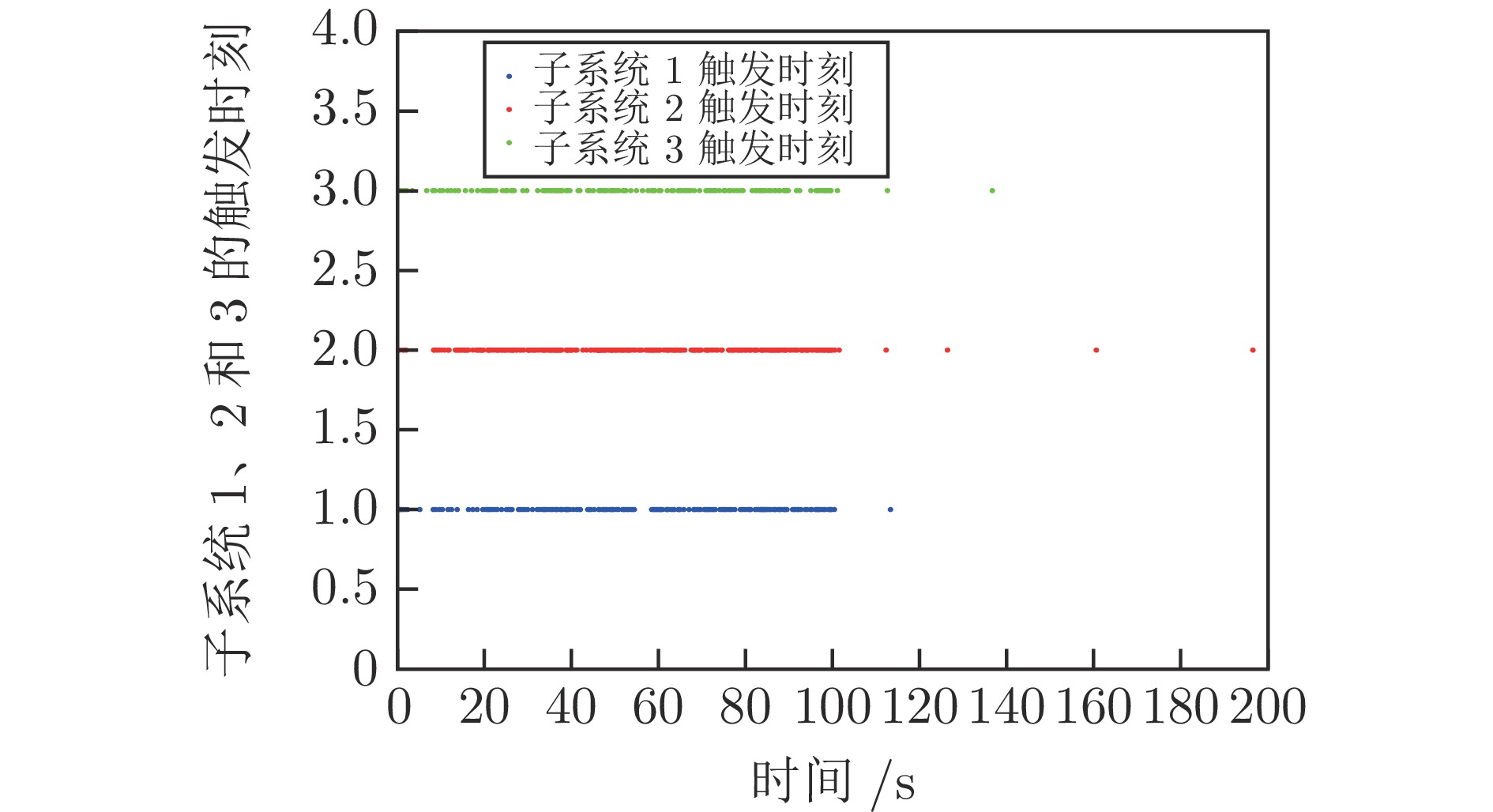
针对一类系统动态未知且受互联项影响的非线性互联大规模系统, 提出一种新的在线分散式动态事件触发控制(Dynamic event-triggered control, DETC)方案. 首先, 构建基于神经网络的辨识器来重构互联系统的未知内部动态. 其次, 使用自适应评判网络在事件触发机制下学习近似最优控制策略. 在所设计的动态事件触发控制机制下, 各子系统独立地设计自己的控制策略, 且各控制策略的更新是异步进行的. 也就是说, 各个分散式事件触发条件和控制器仅依赖于各自子系统的局部状态信息, 而无需频繁获取相邻子系统的信息, 从而规避通过通信网络在子系统间传递状态信息的需求. 然后, 借助李雅普诺夫稳定性定理, 从理论上证明所提出的闭环控制系统状态和评判网络权值估计误差都是最终一致有界的. 最后, 通过一个数值仿真示例和一个实际工程示例验证了所提出的动态事件触发控制方法的有效性和实用性.
针对一类系统动态未知且受互联项影响的非线性互联大规模系统, 提出一种新的在线分散式动态事件触发控制(Dynamic event-triggered control, DETC)方案. 首先, 构建基于神经网络的辨识器来重构互联系统的未知内部动态. 其次, 使用自适应评判网络在事件触发机制下学习近似最优控制策略. 在所设计的动态事件触发控制机制下, 各子系统独立地设计自己的控制策略, 且各控制策略的更新是异步进行的. 也就是说, 各个分散式事件触发条件和控制器仅依赖于各自子系统的局部状态信息, 而无需频繁获取相邻子系统的信息, 从而规避通过通信网络在子系统间传递状态信息的需求. 然后, 借助李雅普诺夫稳定性定理, 从理论上证明所提出的闭环控制系统状态和评判网络权值估计误差都是最终一致有界的. 最后, 通过一个数值仿真示例和一个实际工程示例验证了所提出的动态事件触发控制方法的有效性和实用性.
2025, 51(9): 2027-2036.
doi: 10.16383/j.aas.c250090
cstr: 32138.14.j.aas.c250090
摘要:
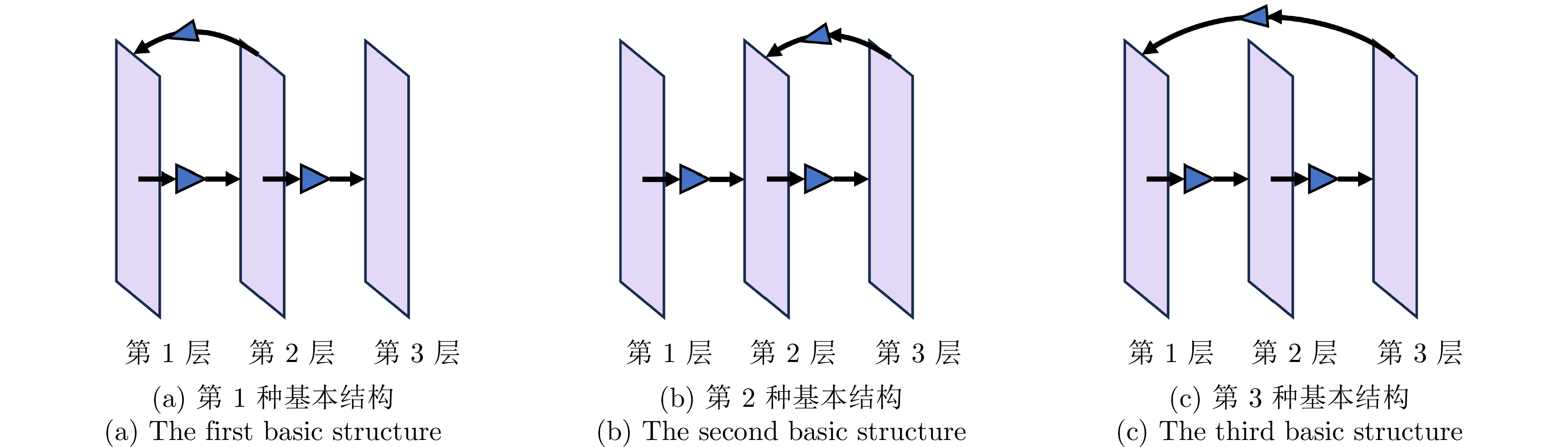
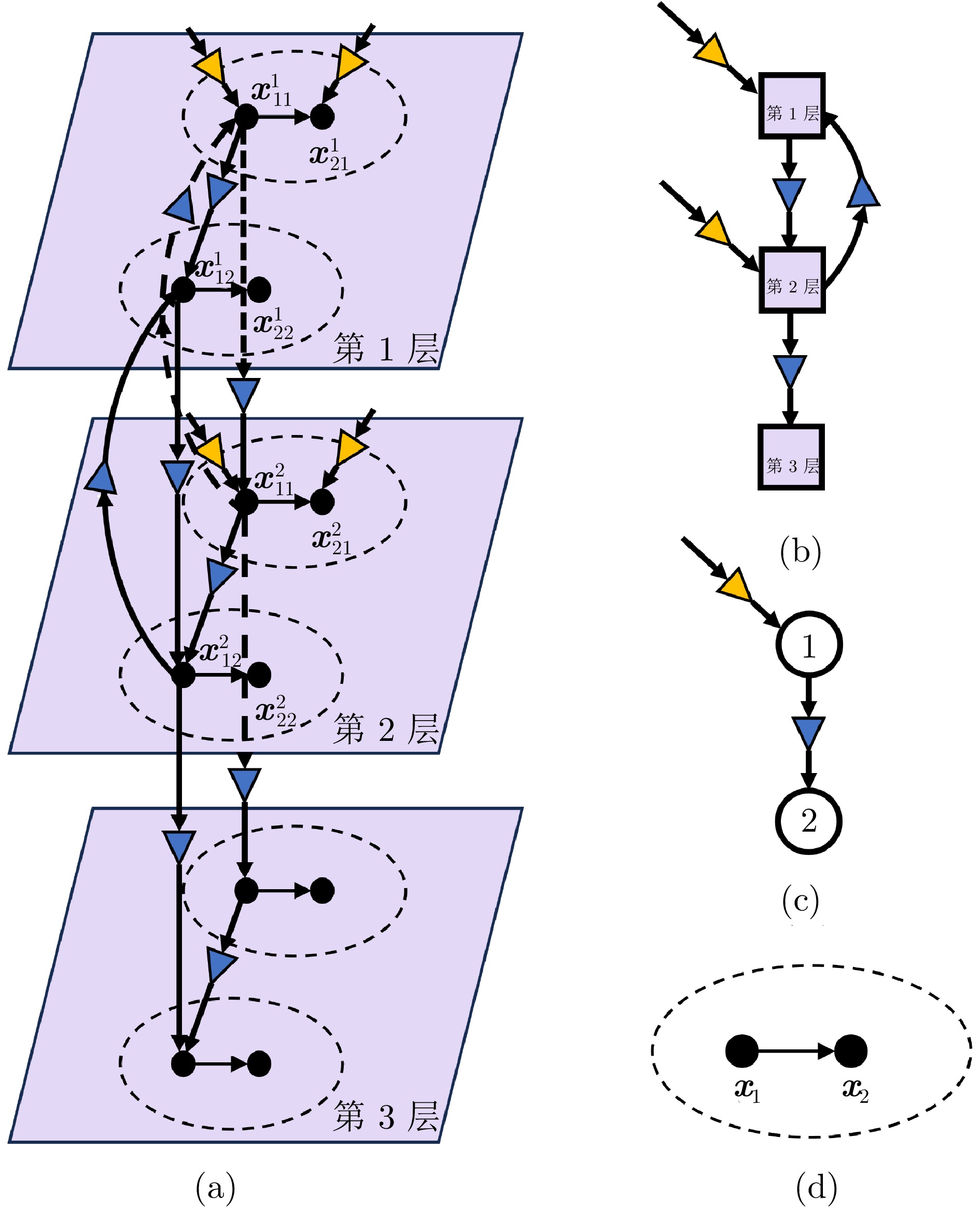
针对具有Snapback层间耦合框架的多层网络化数据采样系统的状态能控性展开研究. 首先, 构建出多层Snapback网络化数据采样系统的数学模型, 并推导出通用三层Snapback网络化数据采样系统能控性的充要条件, 揭示层内网络拓扑结构、节点动力学、外部控制输入、数据采样及层间耦合框架等因素对系统能控性的影响. 针对层内耦合矩阵为可对角化矩阵的基本Snapback网络化数据采样系统, 进一步简化其能控性条件, 并将其结论进行推广. 然后, 考虑由简单Snapback结构叠加而成的复合Snapback多层网络, 给出网络化数据采样系统能控性的充分条件. 最后, 通过例子验证了所给出的结论.
针对具有Snapback层间耦合框架的多层网络化数据采样系统的状态能控性展开研究. 首先, 构建出多层Snapback网络化数据采样系统的数学模型, 并推导出通用三层Snapback网络化数据采样系统能控性的充要条件, 揭示层内网络拓扑结构、节点动力学、外部控制输入、数据采样及层间耦合框架等因素对系统能控性的影响. 针对层内耦合矩阵为可对角化矩阵的基本Snapback网络化数据采样系统, 进一步简化其能控性条件, 并将其结论进行推广. 然后, 考虑由简单Snapback结构叠加而成的复合Snapback多层网络, 给出网络化数据采样系统能控性的充分条件. 最后, 通过例子验证了所给出的结论.

2025, 51(9): 2037-2057.
doi: 10.16383/j.aas.c250023
cstr: 32138.14.j.aas.c250023
摘要:
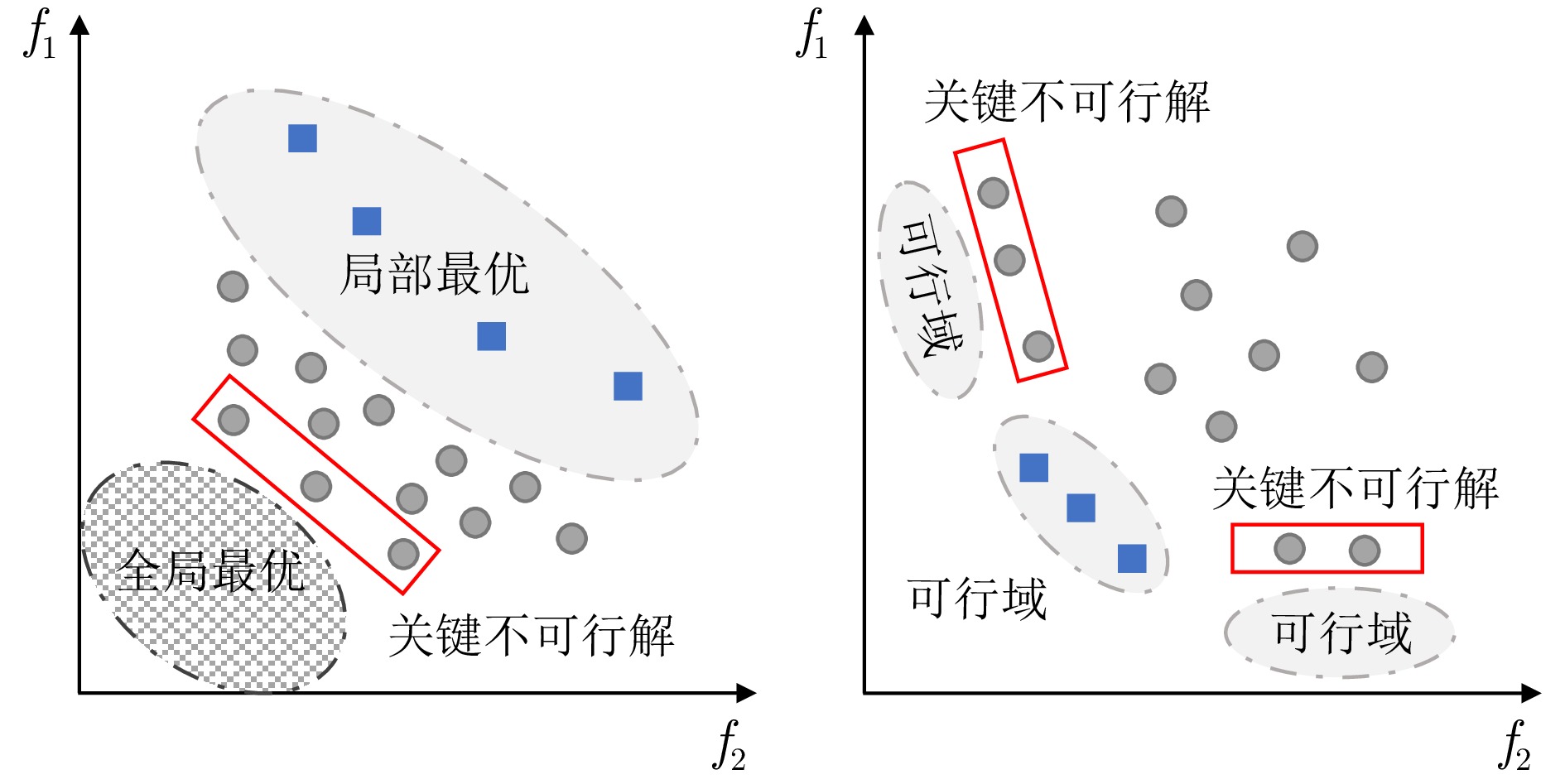
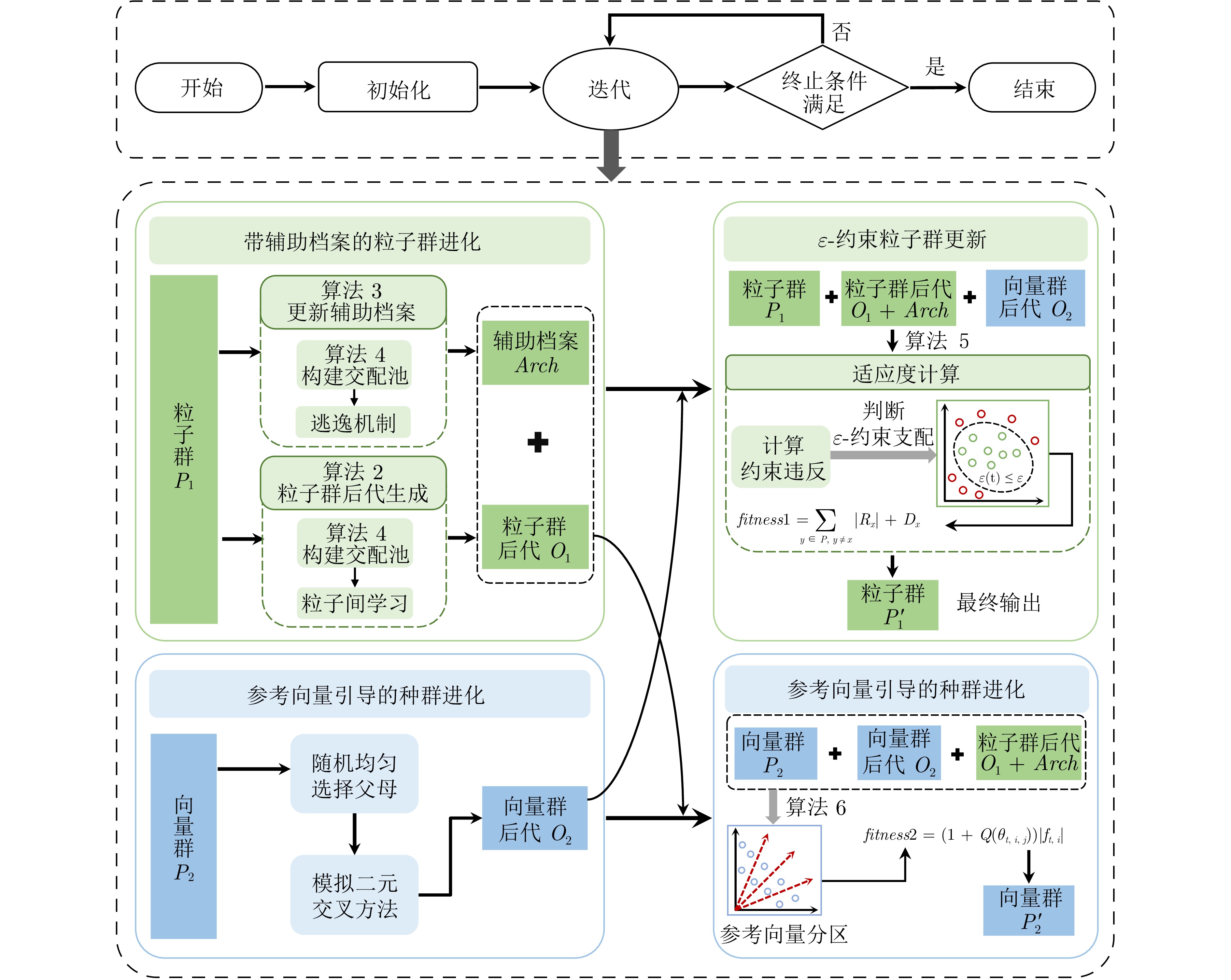
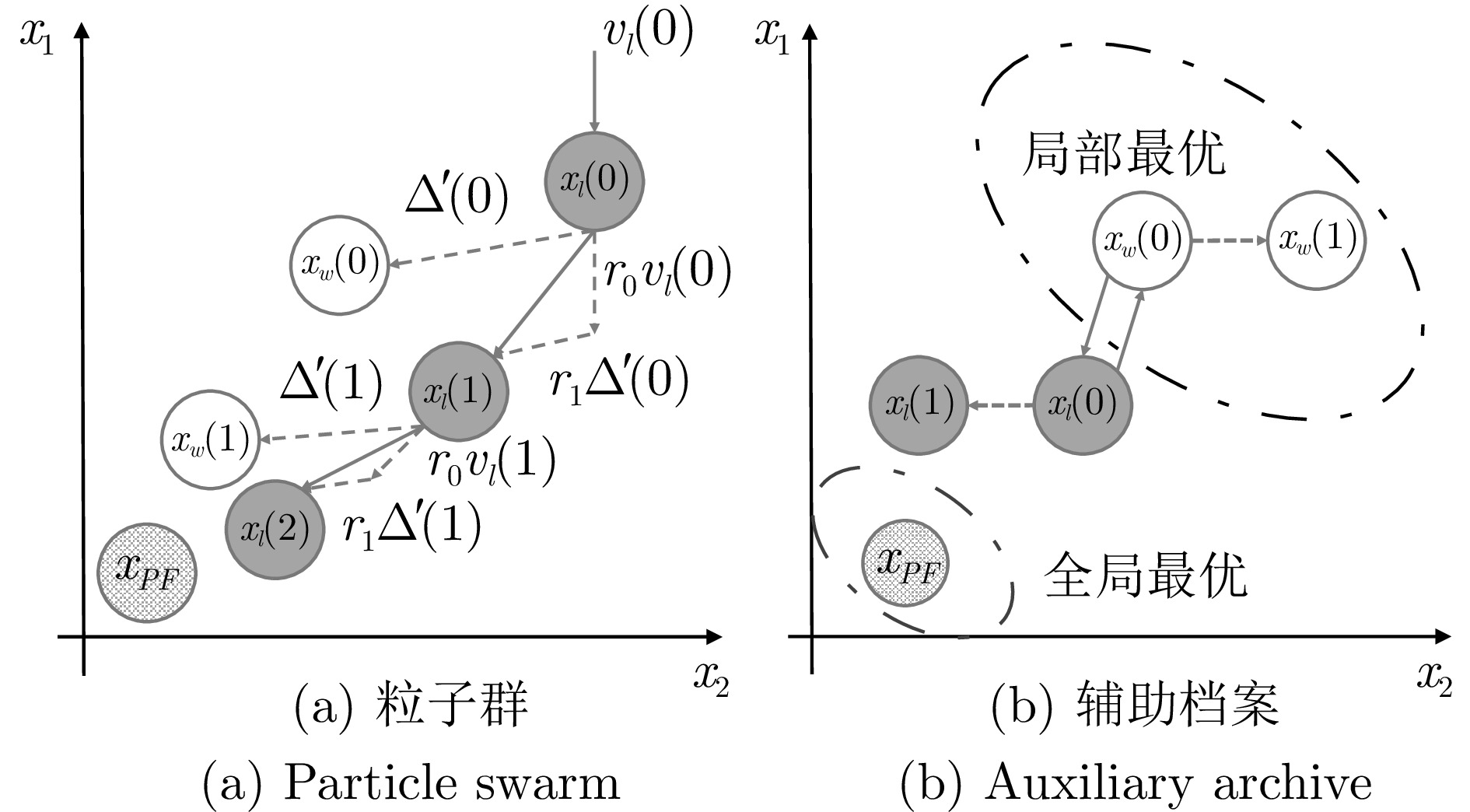
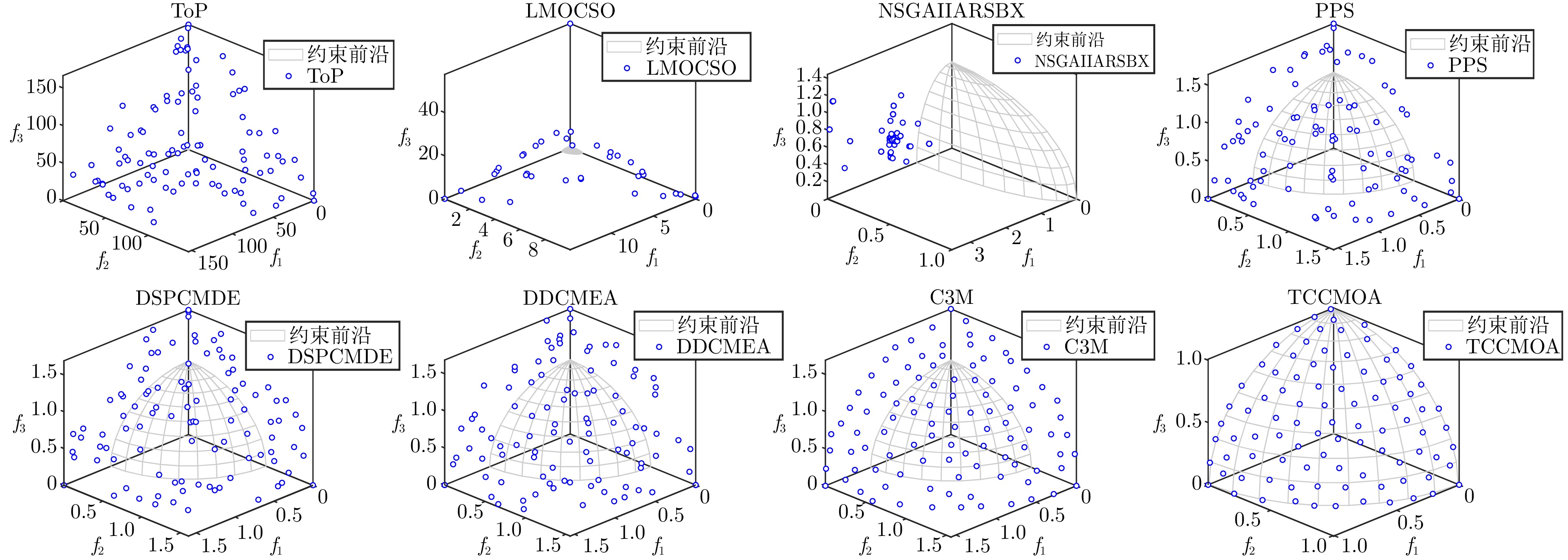
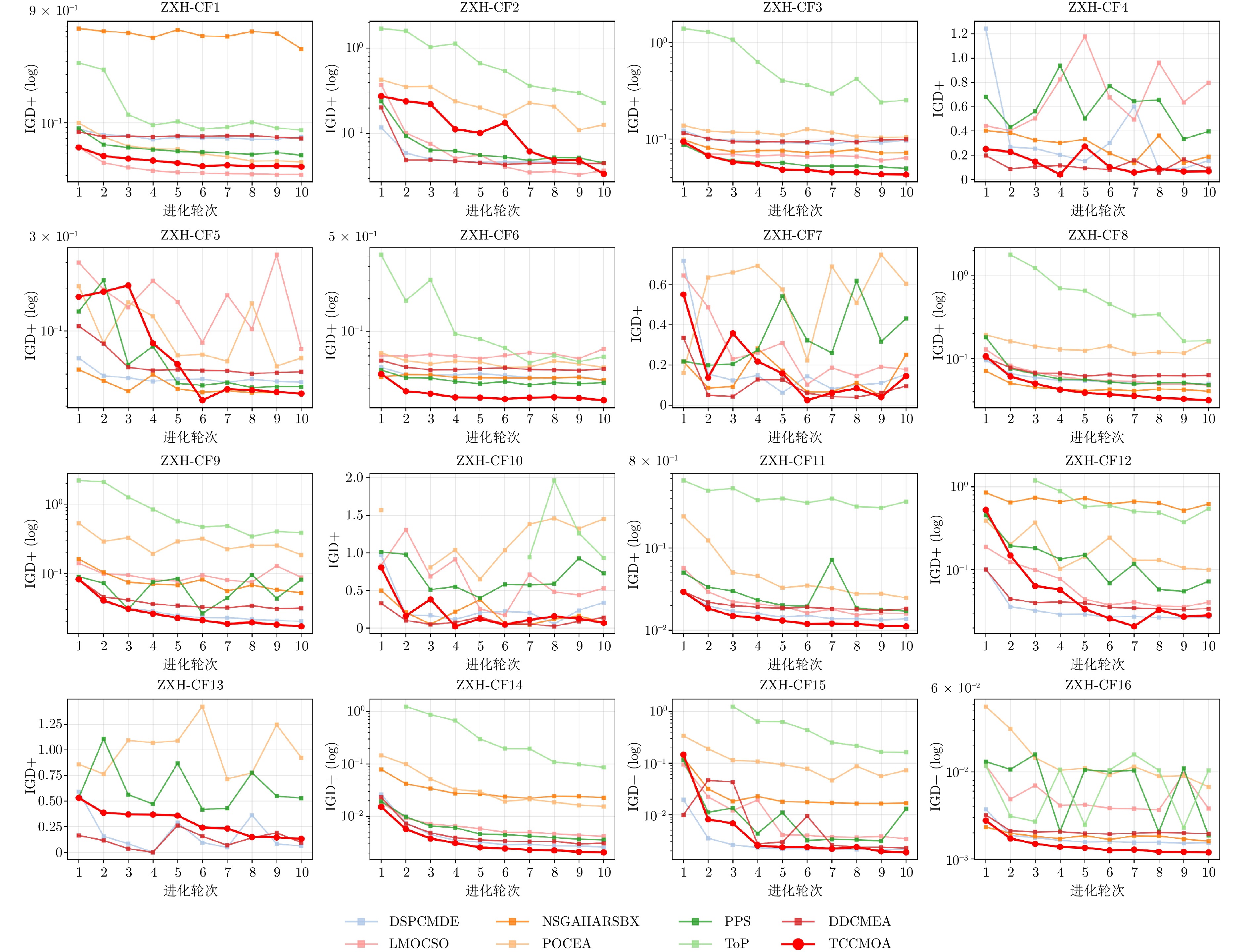
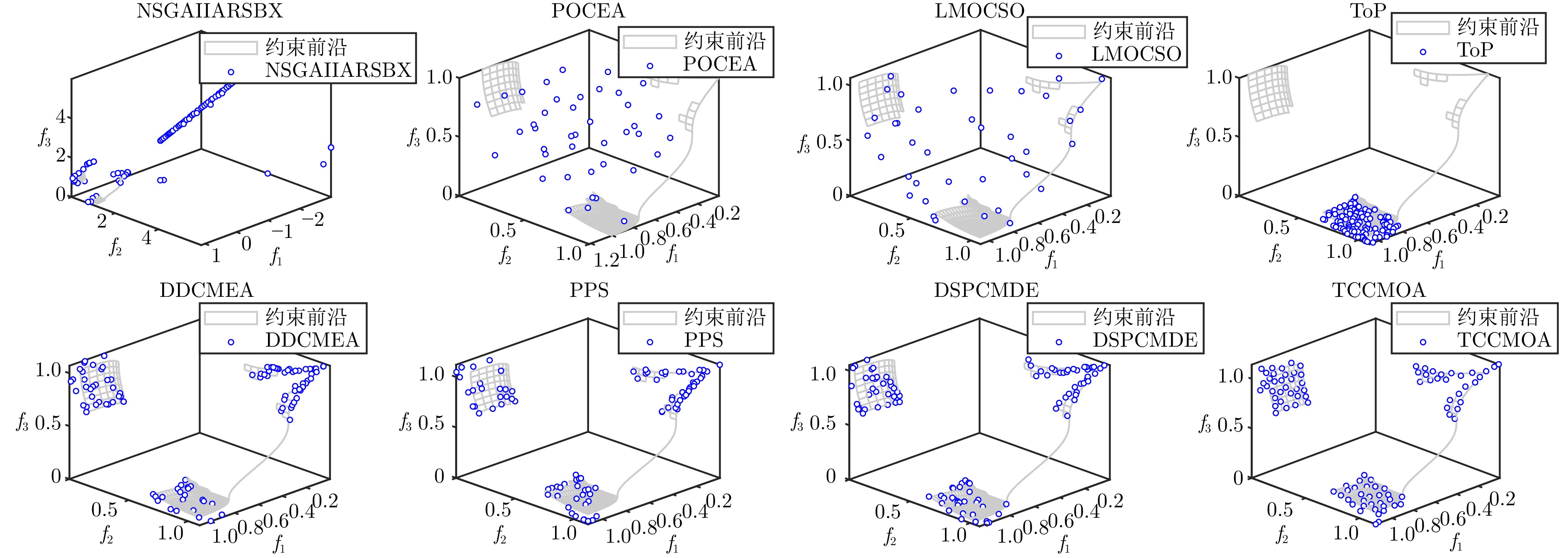
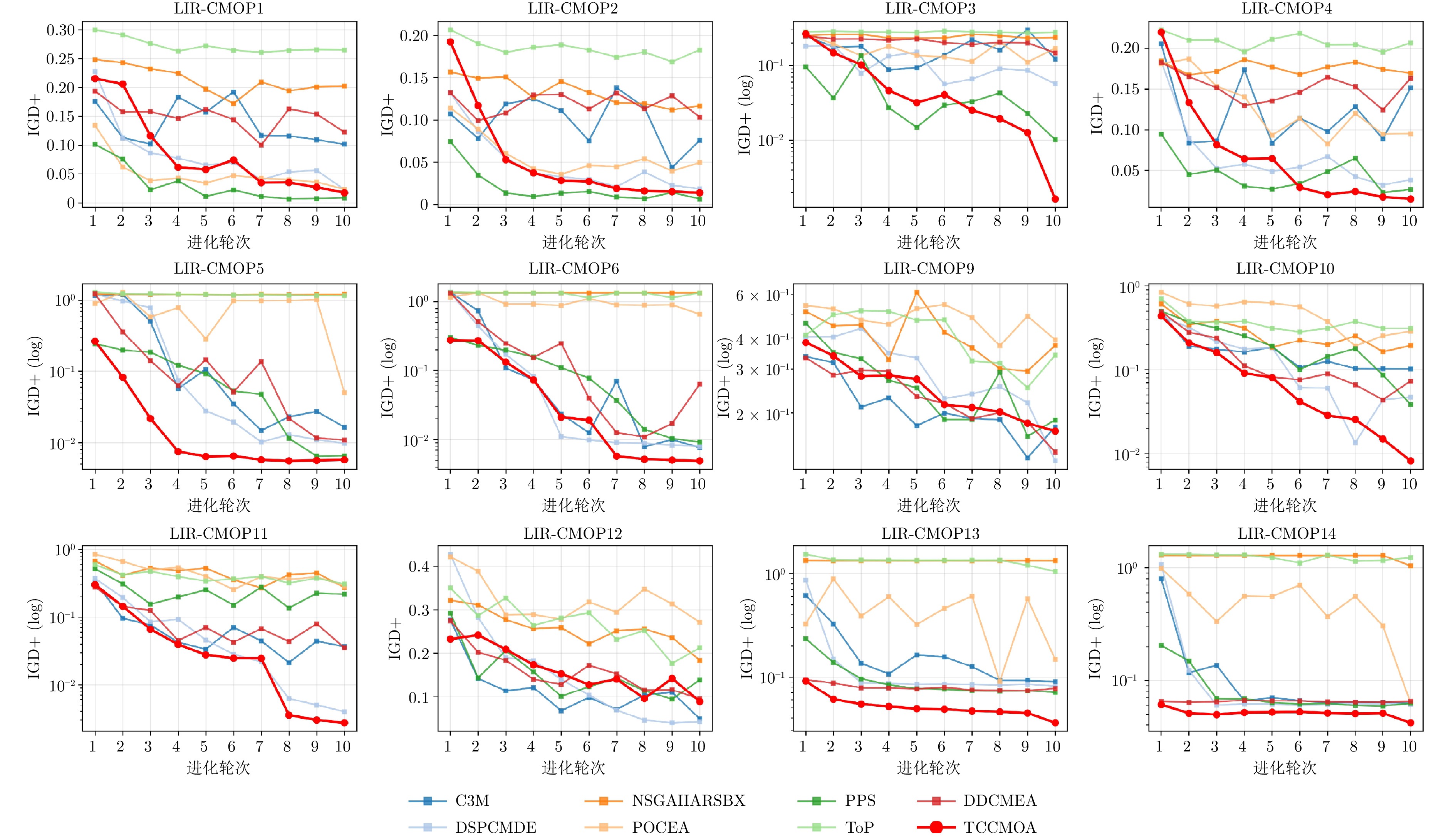
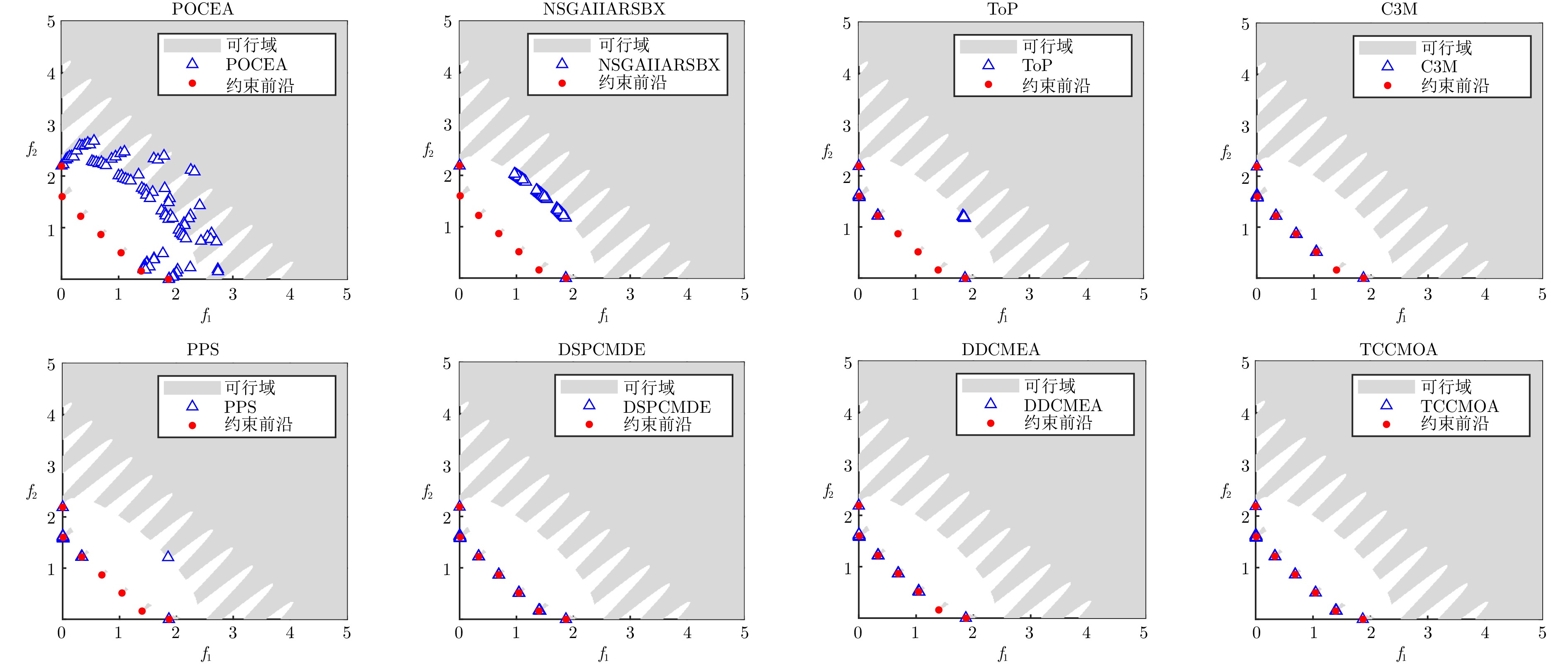
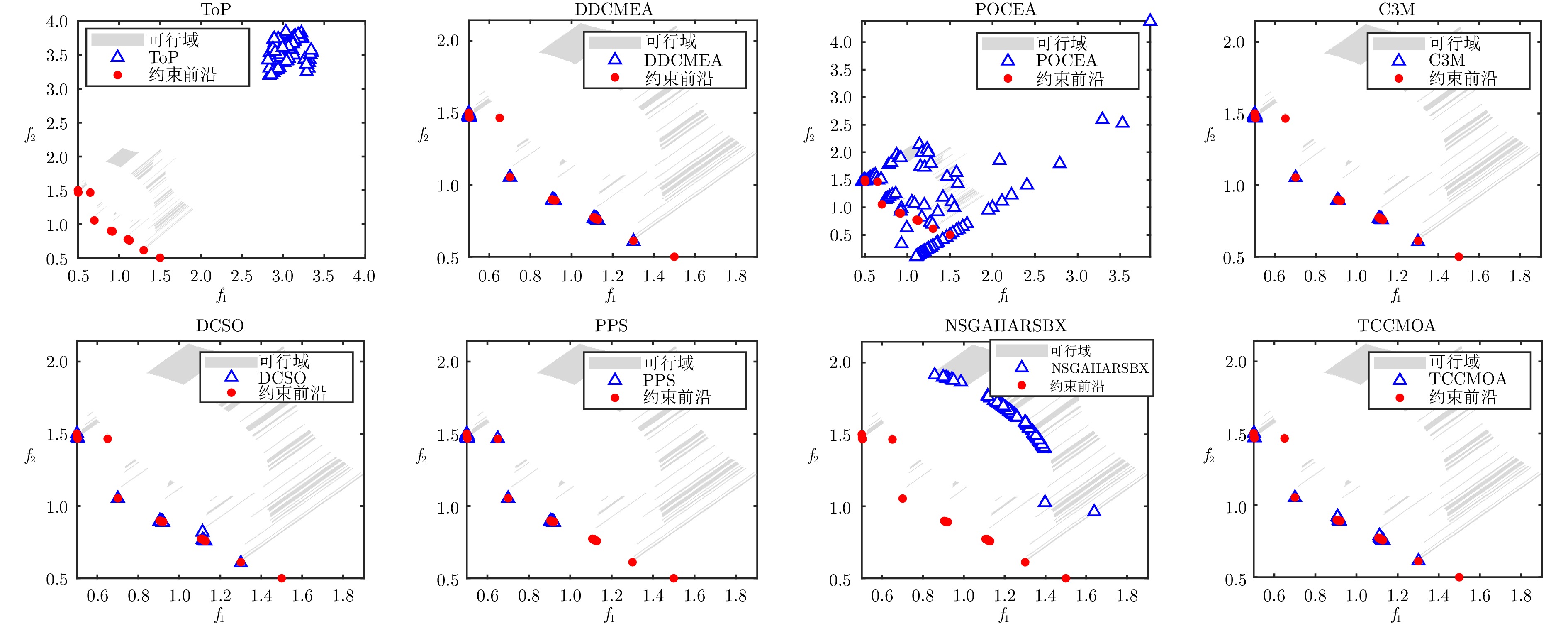
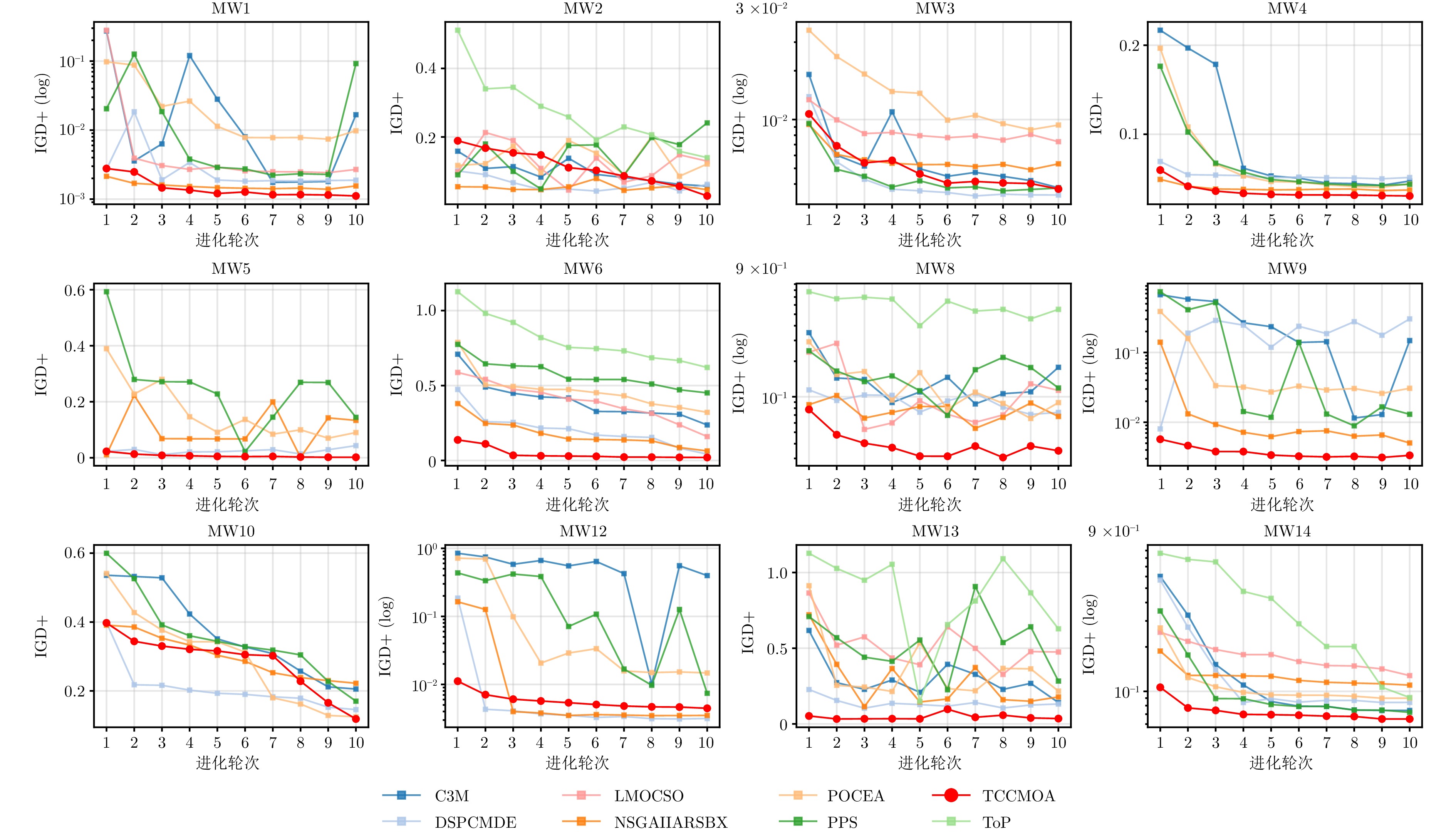
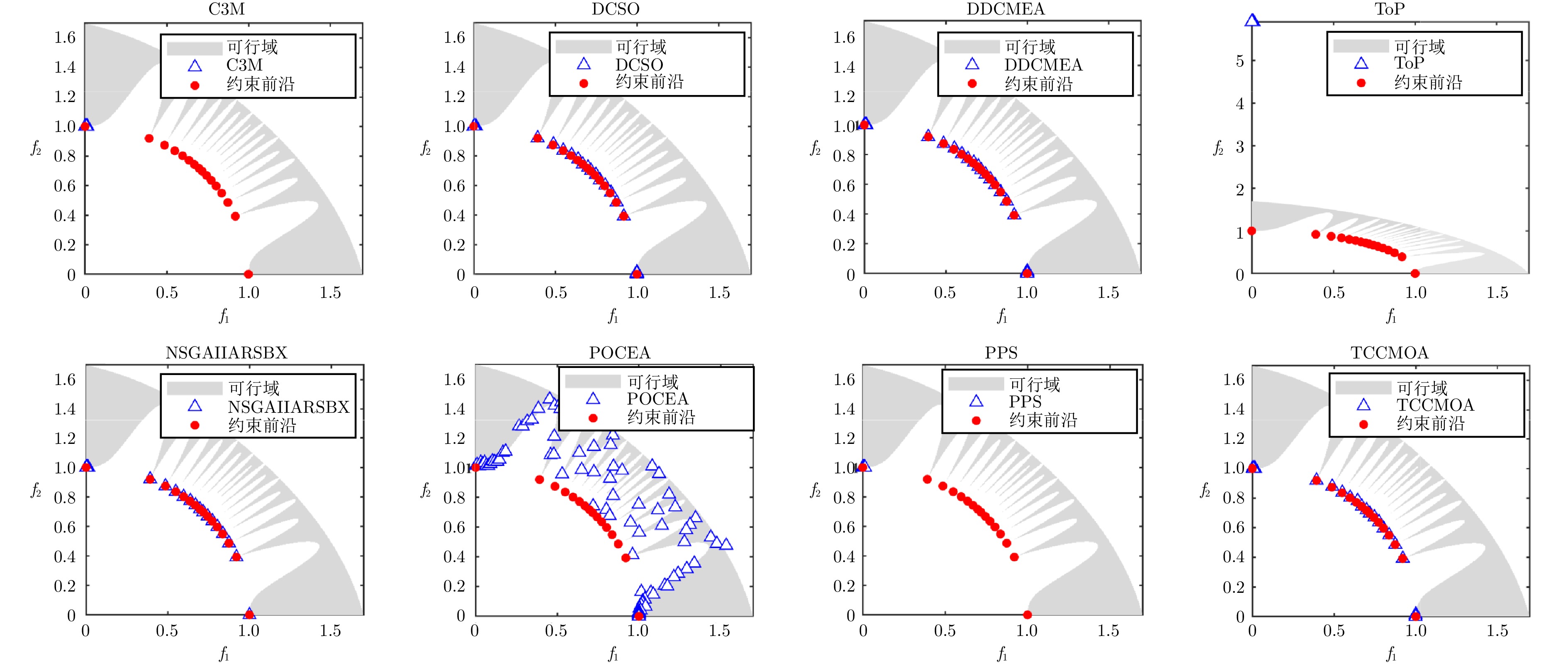
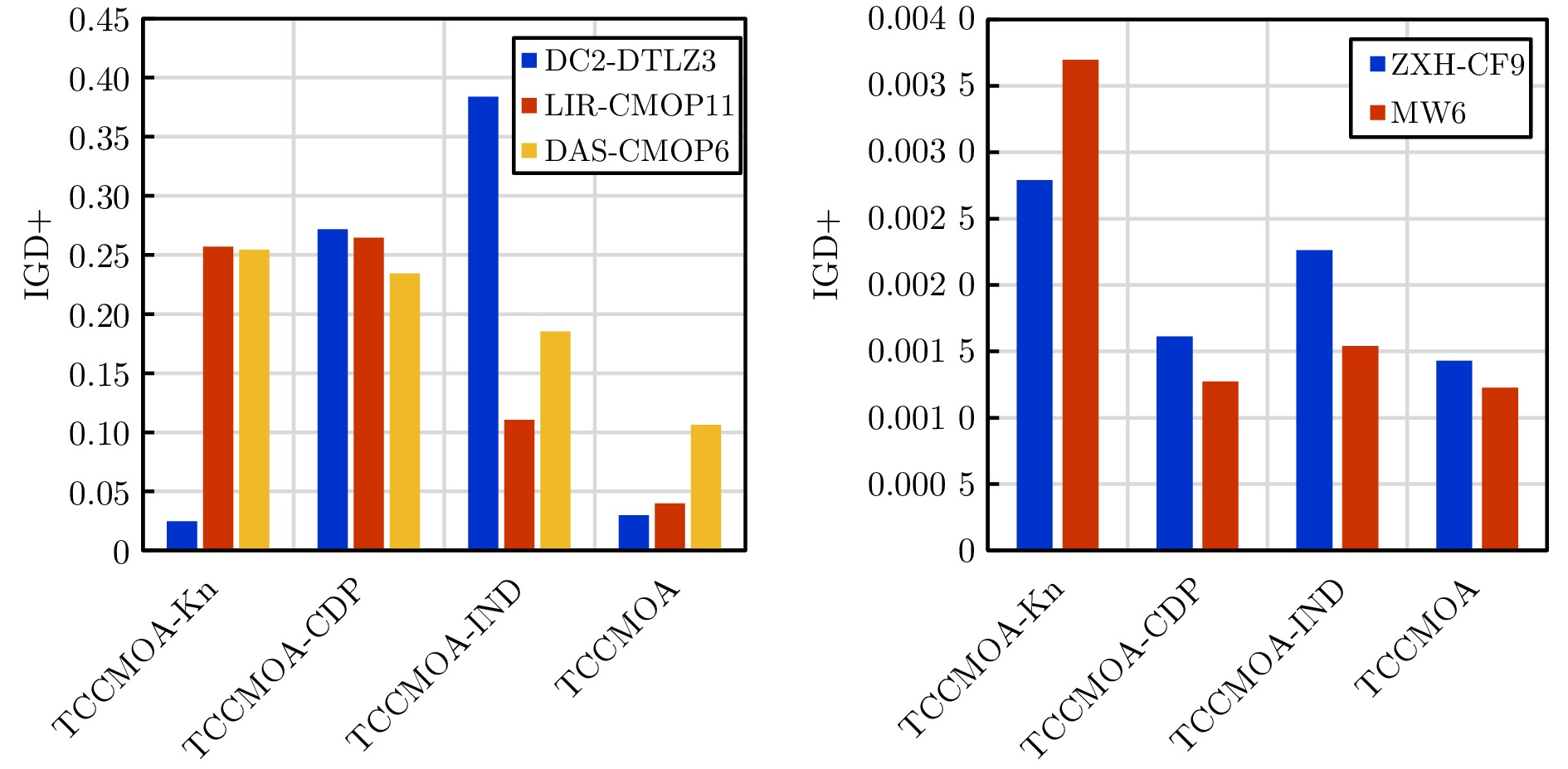
约束多目标优化问题主要考虑如何在复杂约束条件下同时优化多个相互冲突的目标, 其广泛存在于工程实践中. 解决多目标优化问题的关键在于约束满足和目标优化之间的平衡. 然而, 当问题具有复杂可行域时, 现有算法往往存在选择压力大小的矛盾: 若算法的选择压力较大, 种群容易陷入局部最优; 若算法的选择压力较小, 种群则难以搜索到完整的约束前沿. 针对此, 提出一种双种群协同进化约束多目标优化算法. 所提算法采用双种群协同进化框架, 引入粒子群和向量群以实现种群间的信息共享和优势互补. 其中粒子群使用带有辅助档案的粒子群优化器, 通过粒子间的相互学习实现快速收敛, 而辅助档案则借助逃逸机制帮助粒子群跳出局部最优. 同时, 设计一种新的\begin{document}$\varepsilon$\end{document}
约束多目标优化问题主要考虑如何在复杂约束条件下同时优化多个相互冲突的目标, 其广泛存在于工程实践中. 解决多目标优化问题的关键在于约束满足和目标优化之间的平衡. 然而, 当问题具有复杂可行域时, 现有算法往往存在选择压力大小的矛盾: 若算法的选择压力较大, 种群容易陷入局部最优; 若算法的选择压力较小, 种群则难以搜索到完整的约束前沿. 针对此, 提出一种双种群协同进化约束多目标优化算法. 所提算法采用双种群协同进化框架, 引入粒子群和向量群以实现种群间的信息共享和优势互补. 其中粒子群使用带有辅助档案的粒子群优化器, 通过粒子间的相互学习实现快速收敛, 而辅助档案则借助逃逸机制帮助粒子群跳出局部最优. 同时, 设计一种新的
2025, 51(9): 2058-2071.
doi: 10.16383/j.aas.c250108
cstr: 32138.14.j.aas.c250108
摘要:
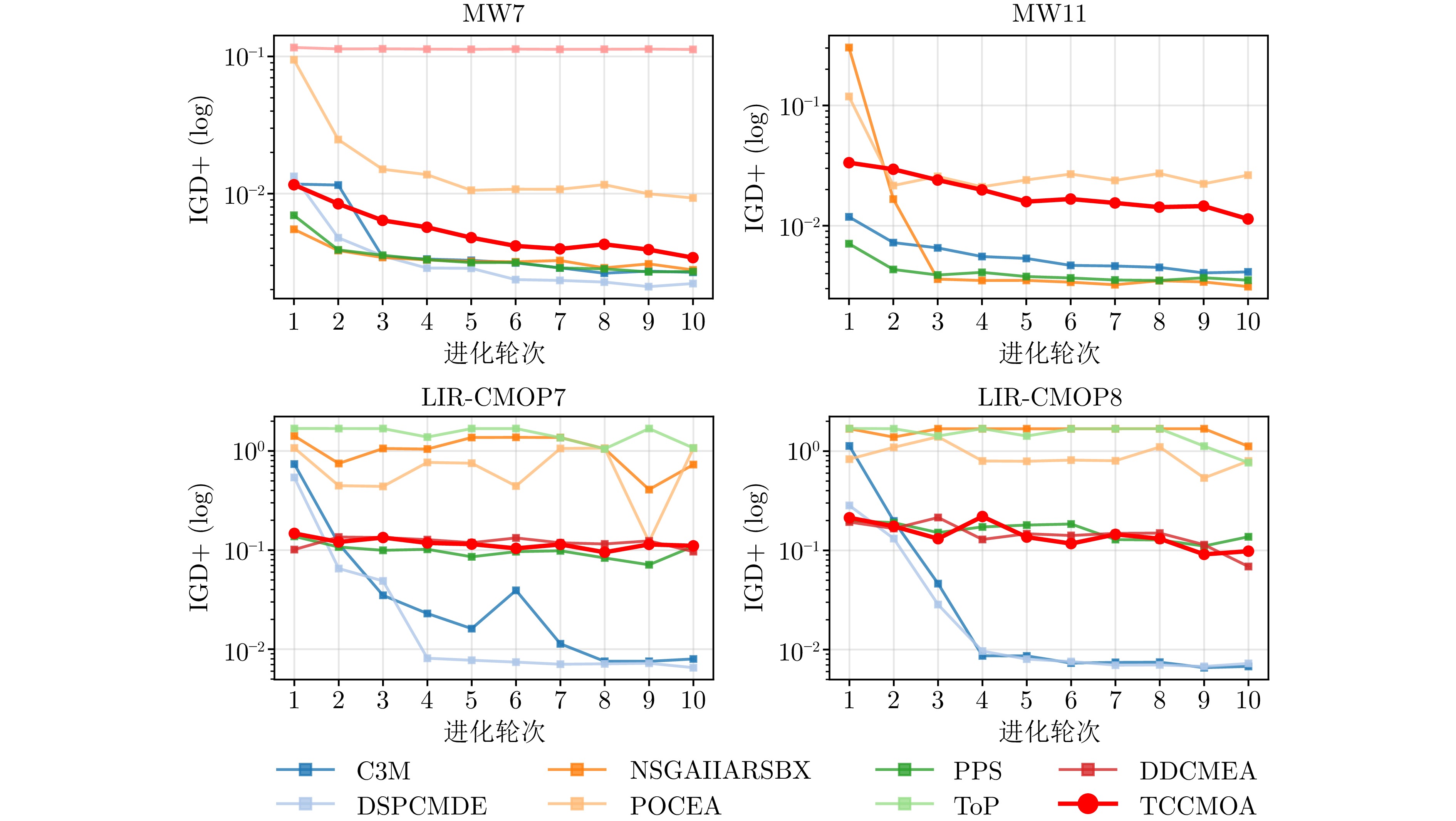
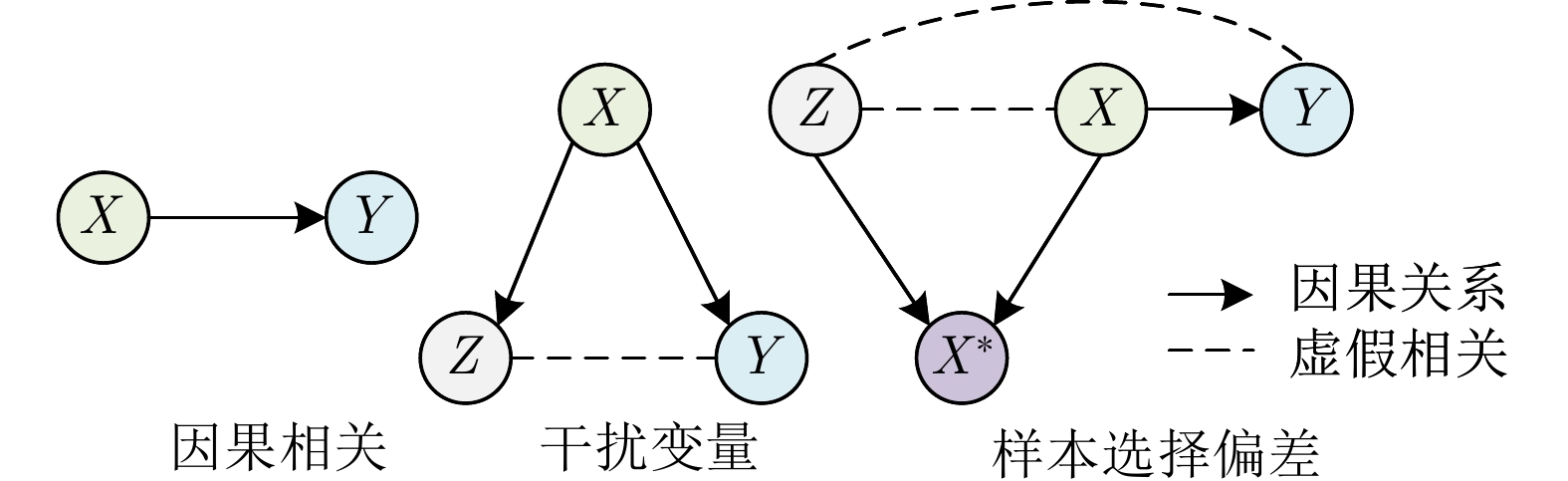
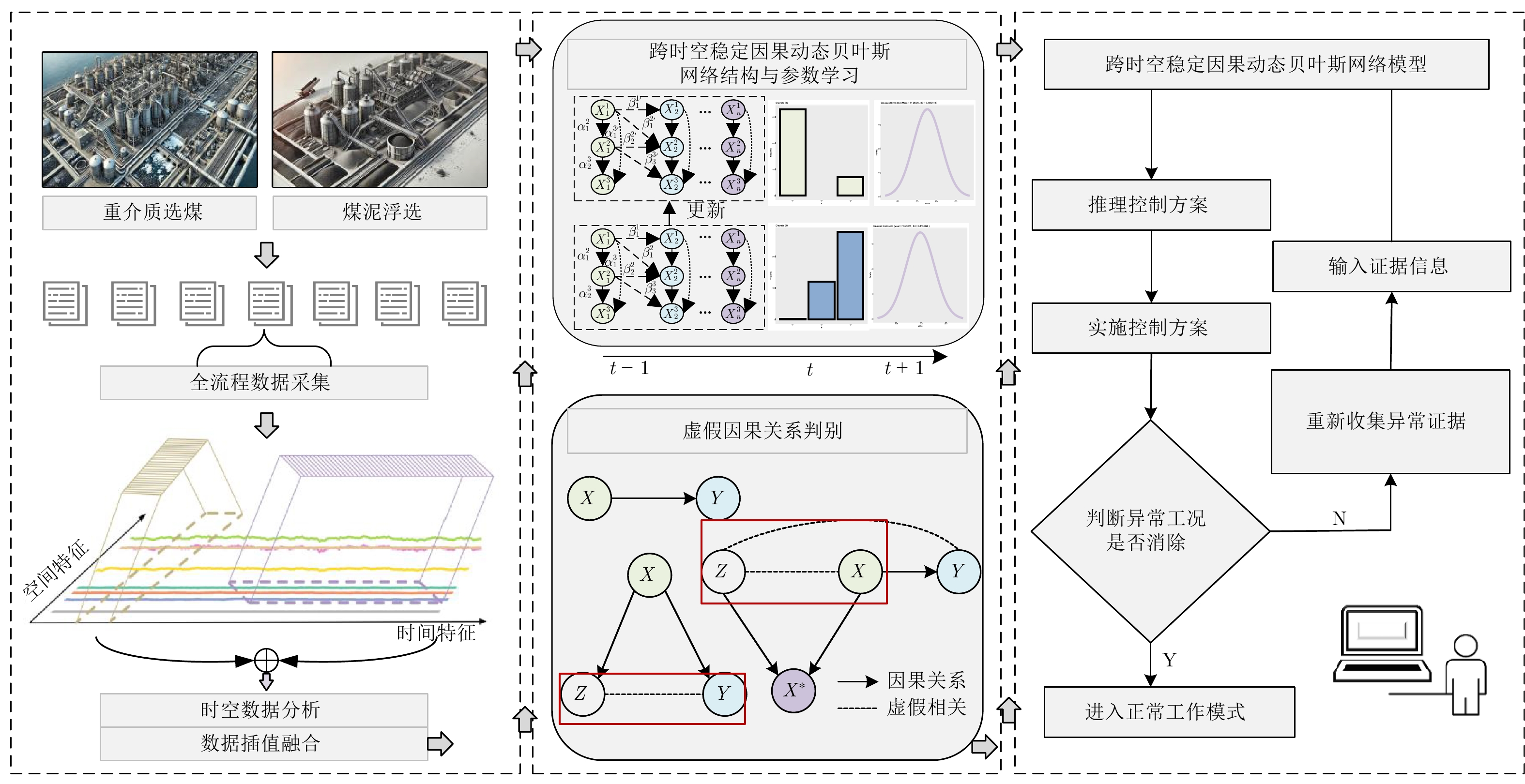
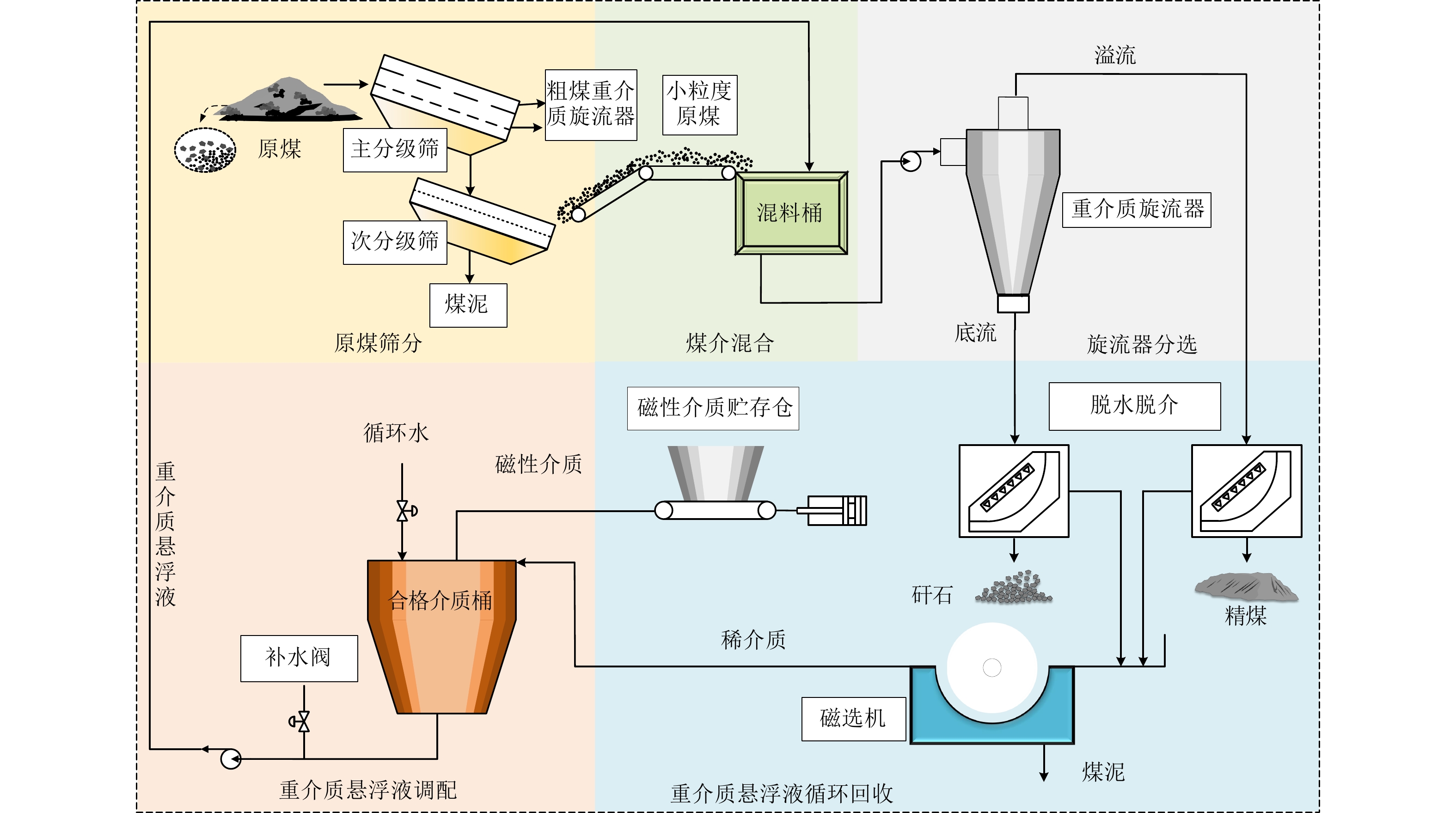
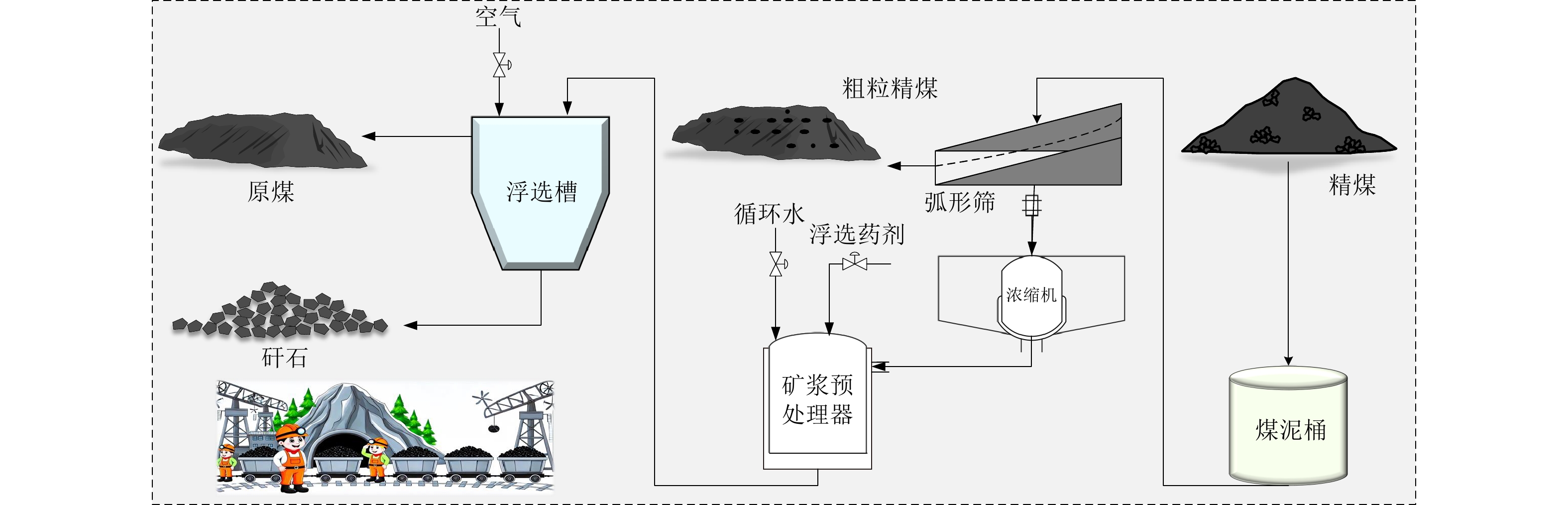
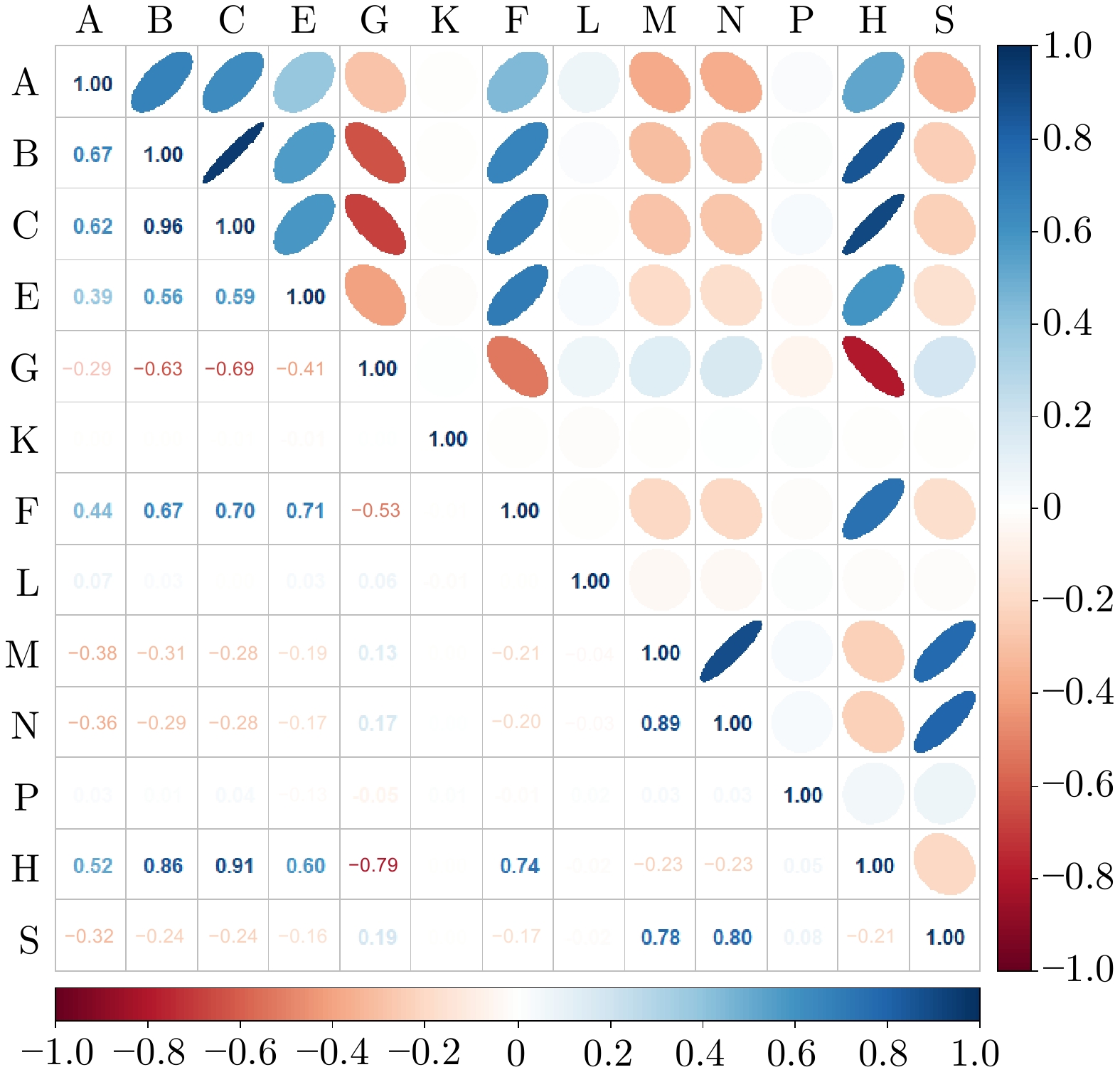
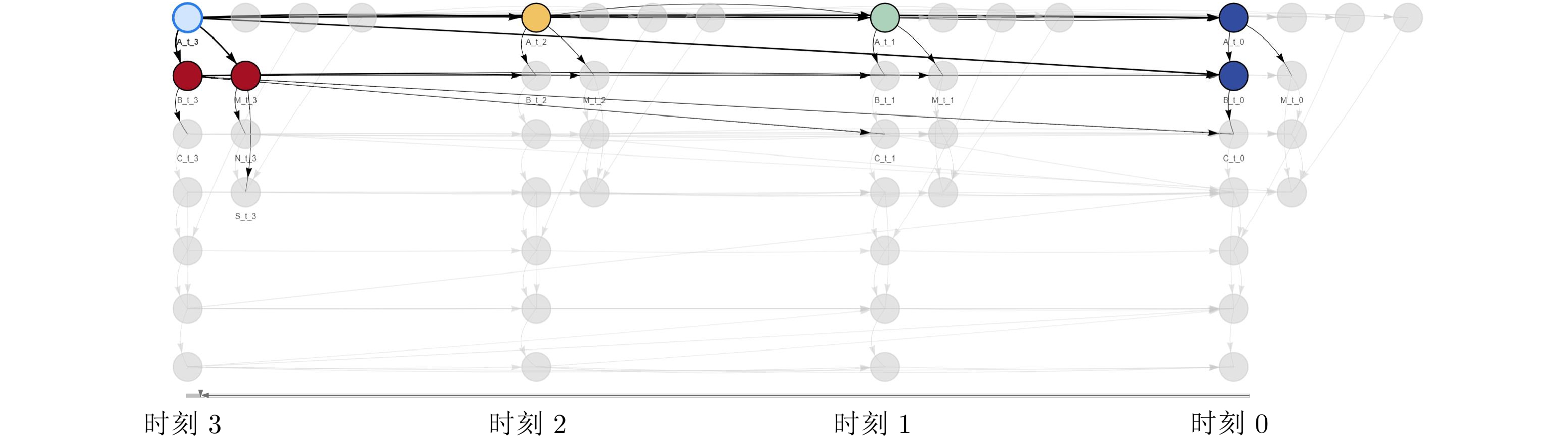
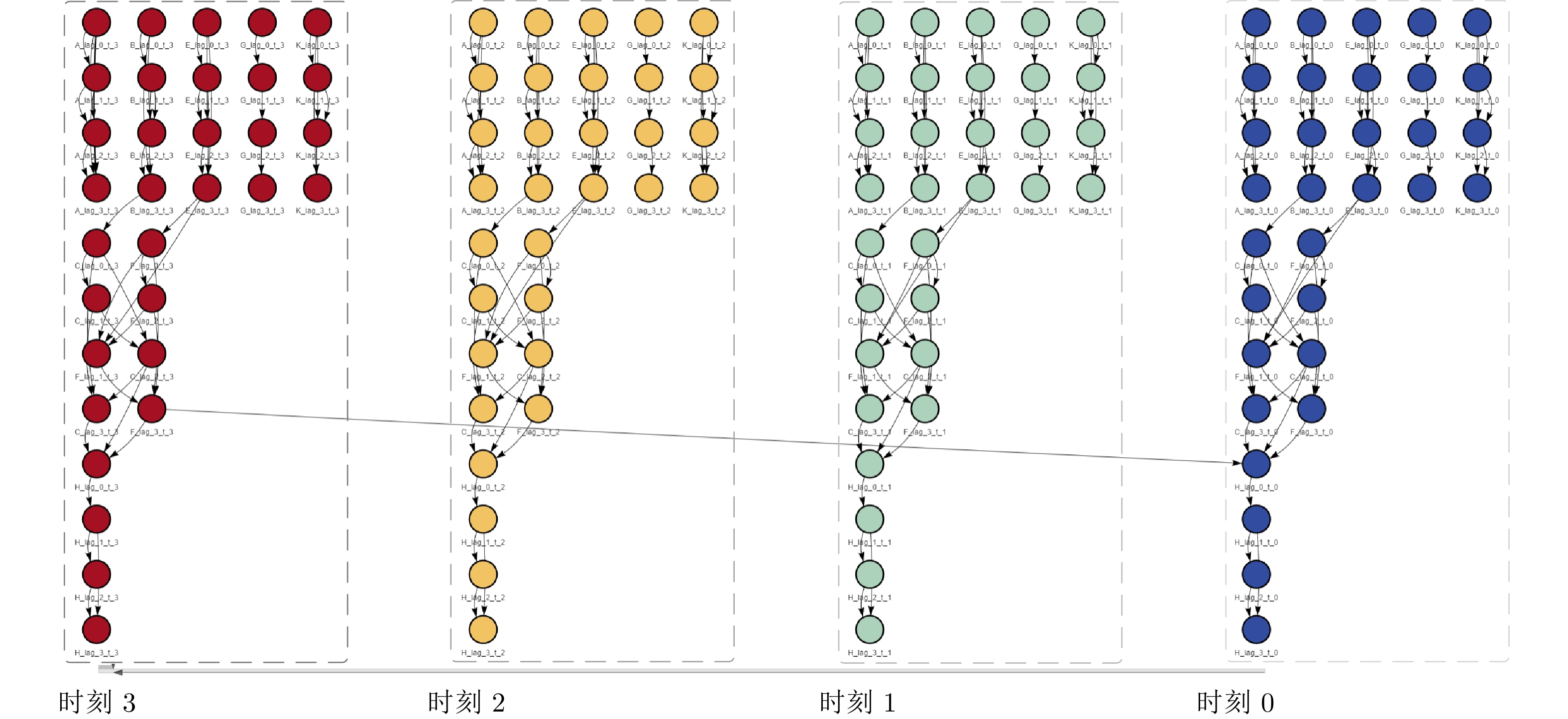
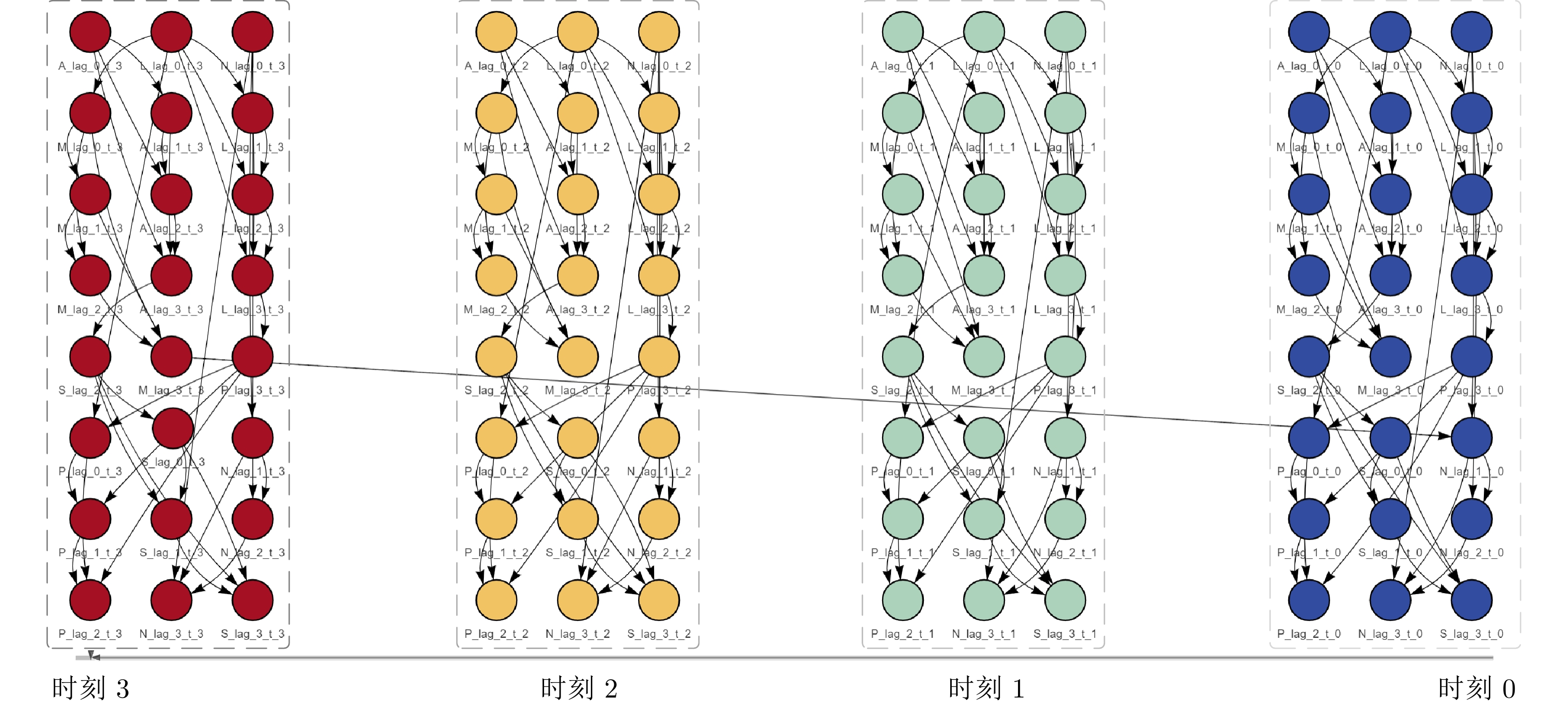
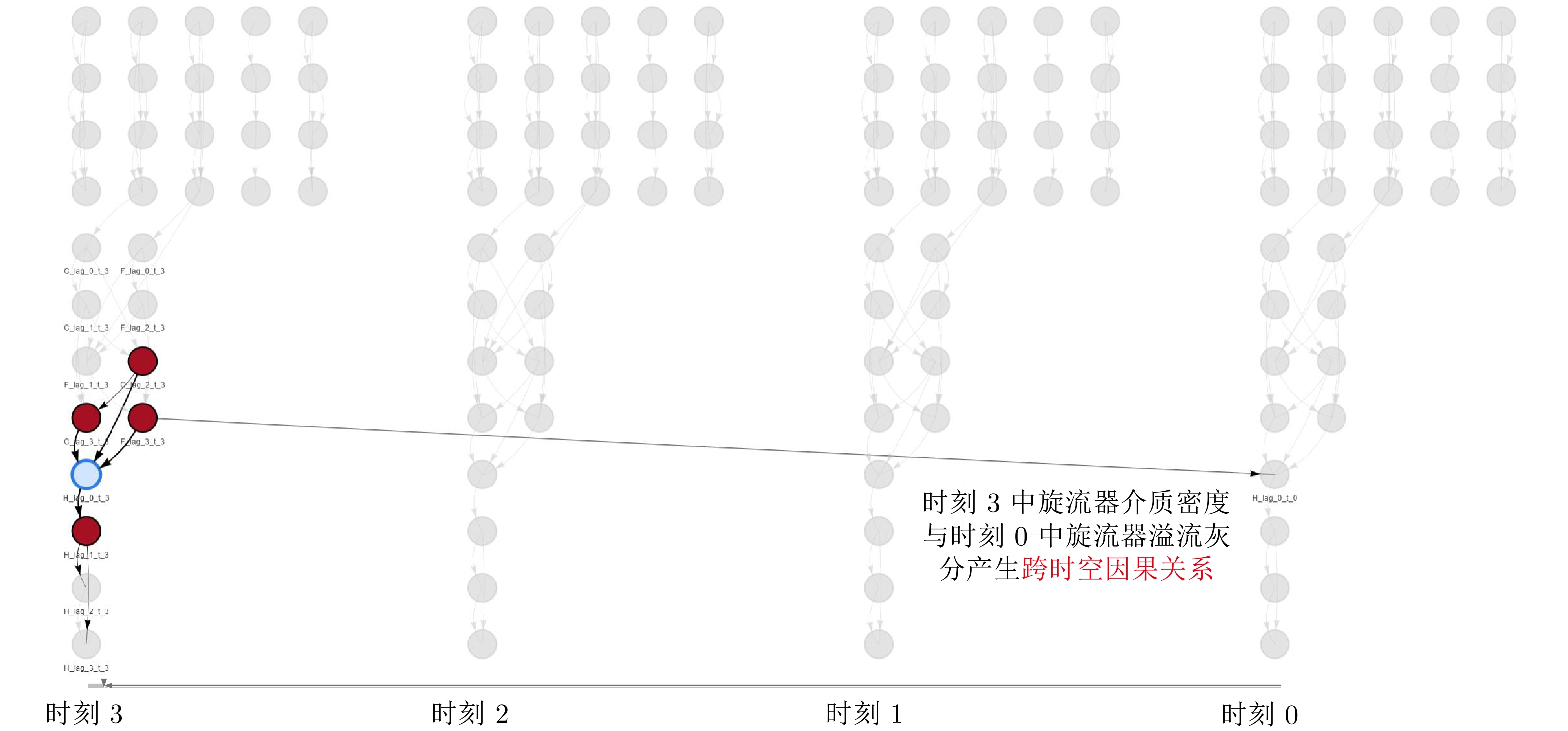
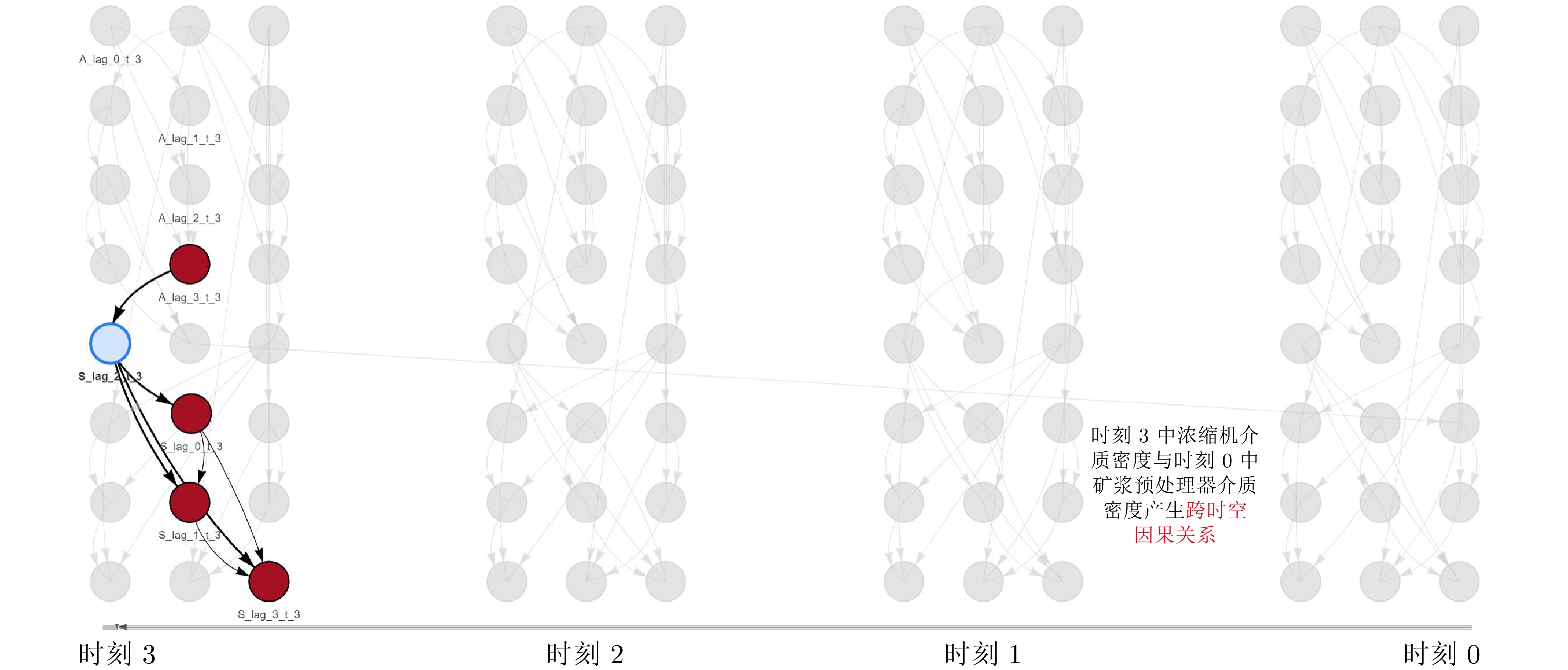
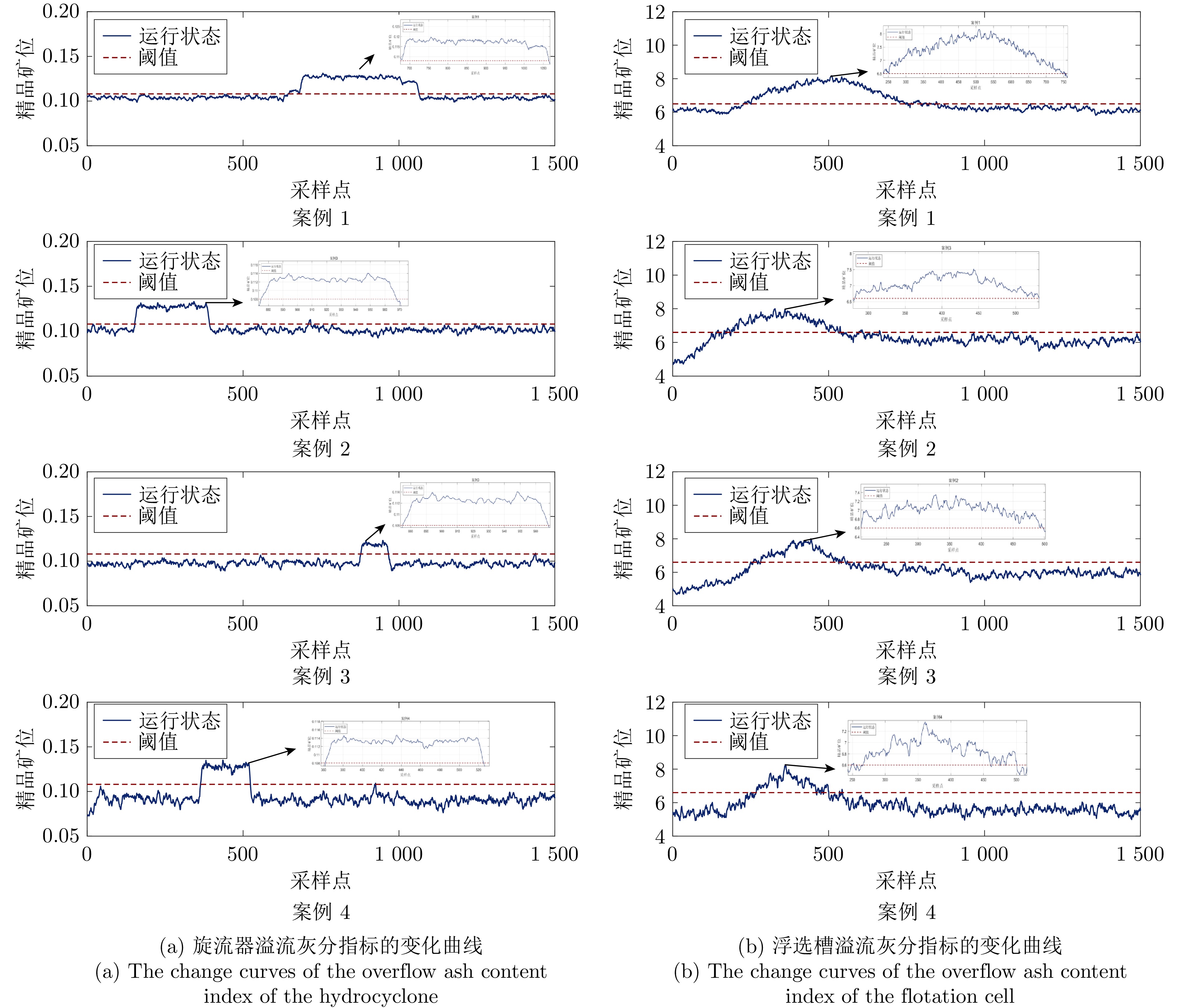
因果关系挖掘对工业过程异常工况定位和控制方案推理至关重要. 然而, 传统的因果关系挖掘方法缺乏对时空动态变化的综合考虑, 难以有效消除虚假因果关系. 针对上述问题, 提出一种基于跨时空稳定因果动态贝叶斯网络的工业过程安全控制方法. 该方法利用稳定学习挖掘并优化不同时空数据分布下的因果一致性特征, 确保所挖掘的因果关系在不同时空单元中具有稳定性. 在此基础上, 利用动态贝叶斯网络引入滞后节点, 捕捉时序数据中的滞后依赖关系, 刻画因果关系的时空演化特性并利用信息熵建立因果关系筛选机制. 此外, 采用基于协变量平衡的样本重加权技术, 通过调整样本权重, 使模型能够更准确地反映理想情况下的因果特性. 最后, 选取12种典型工况案例验证了方法的有效性.
因果关系挖掘对工业过程异常工况定位和控制方案推理至关重要. 然而, 传统的因果关系挖掘方法缺乏对时空动态变化的综合考虑, 难以有效消除虚假因果关系. 针对上述问题, 提出一种基于跨时空稳定因果动态贝叶斯网络的工业过程安全控制方法. 该方法利用稳定学习挖掘并优化不同时空数据分布下的因果一致性特征, 确保所挖掘的因果关系在不同时空单元中具有稳定性. 在此基础上, 利用动态贝叶斯网络引入滞后节点, 捕捉时序数据中的滞后依赖关系, 刻画因果关系的时空演化特性并利用信息熵建立因果关系筛选机制. 此外, 采用基于协变量平衡的样本重加权技术, 通过调整样本权重, 使模型能够更准确地反映理想情况下的因果特性. 最后, 选取12种典型工况案例验证了方法的有效性.
2025, 51(9): 2072-2084.
doi: 10.16383/j.aas.c250130
cstr: 32138.14.j.aas.c250130
摘要:
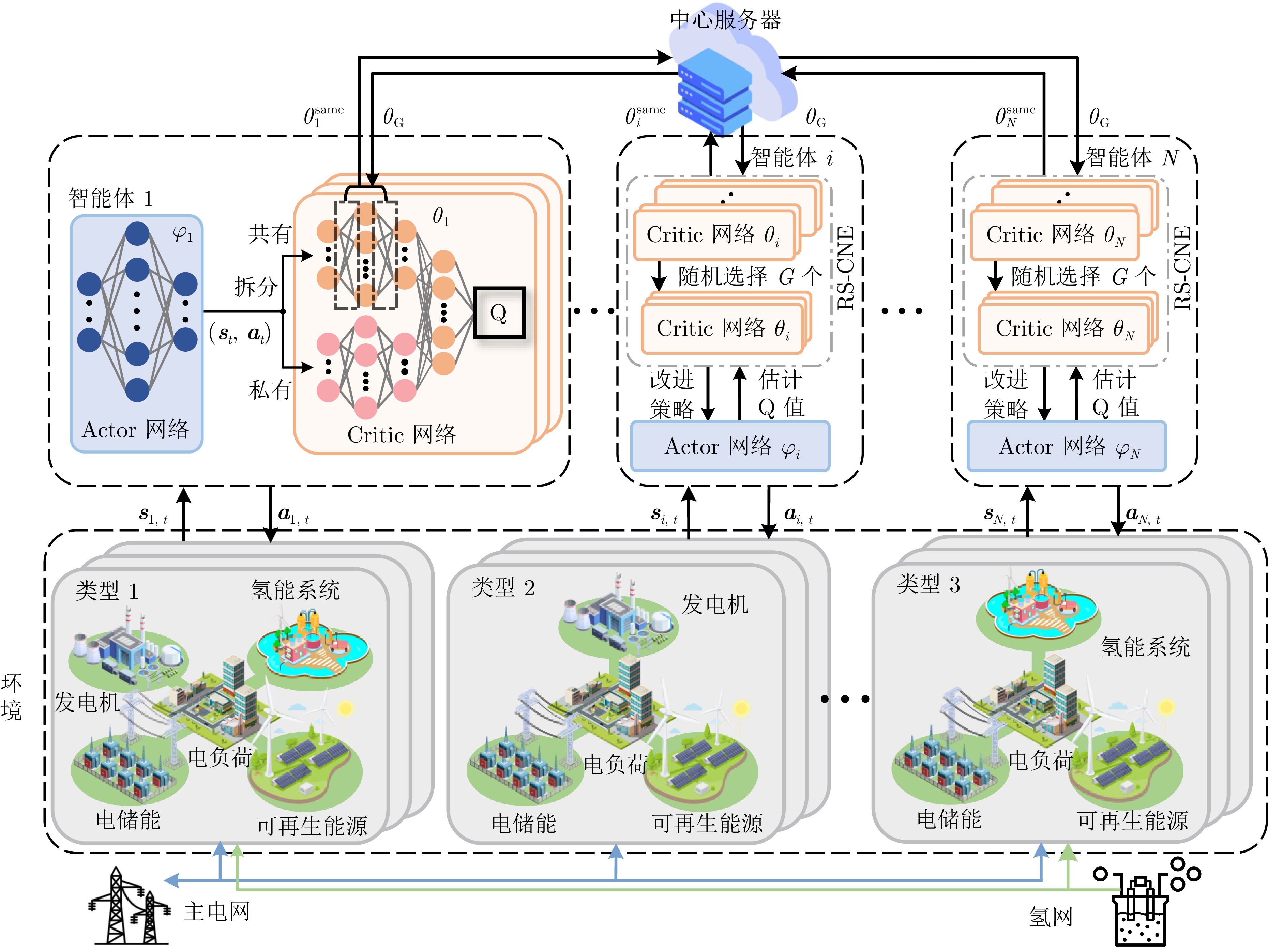
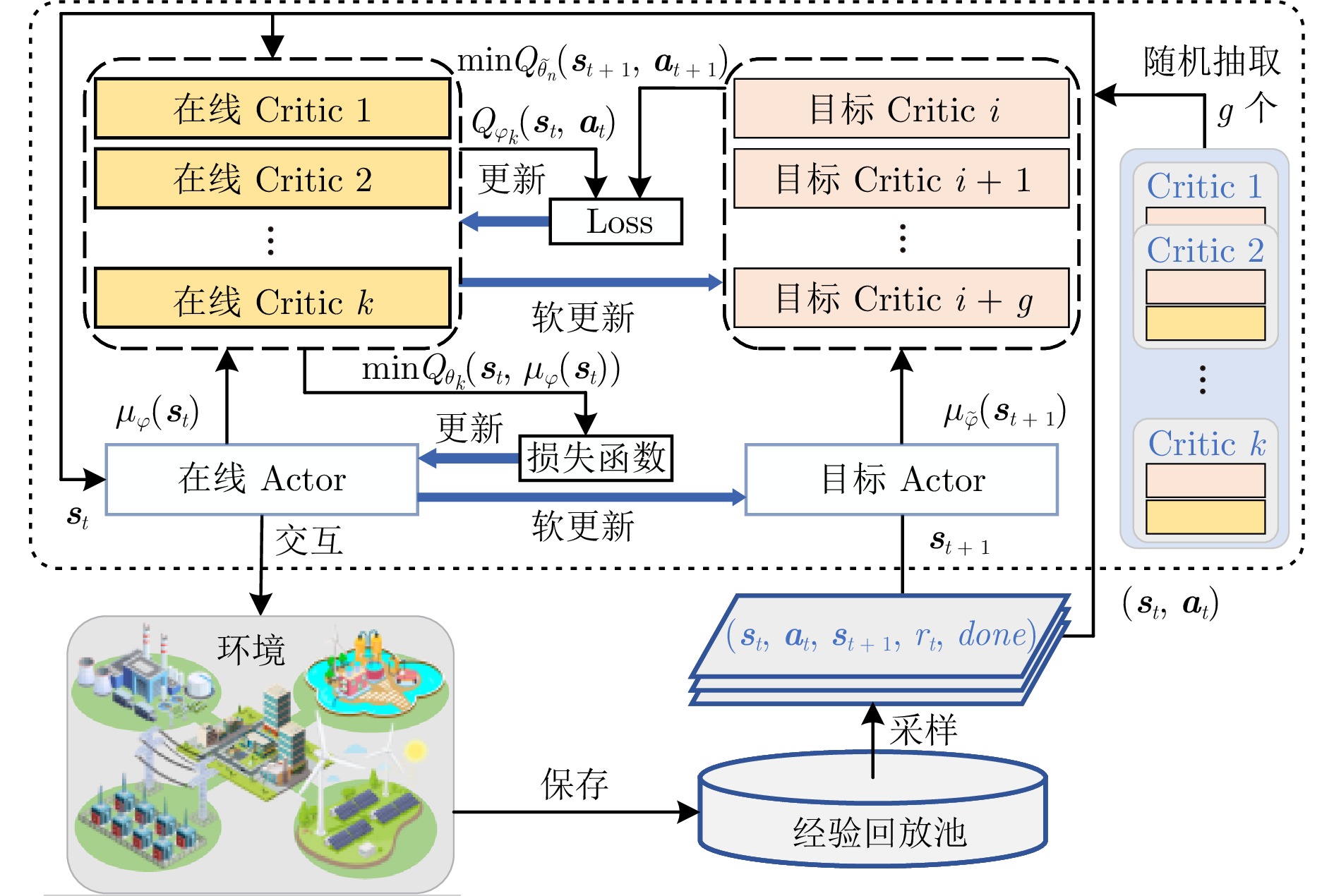
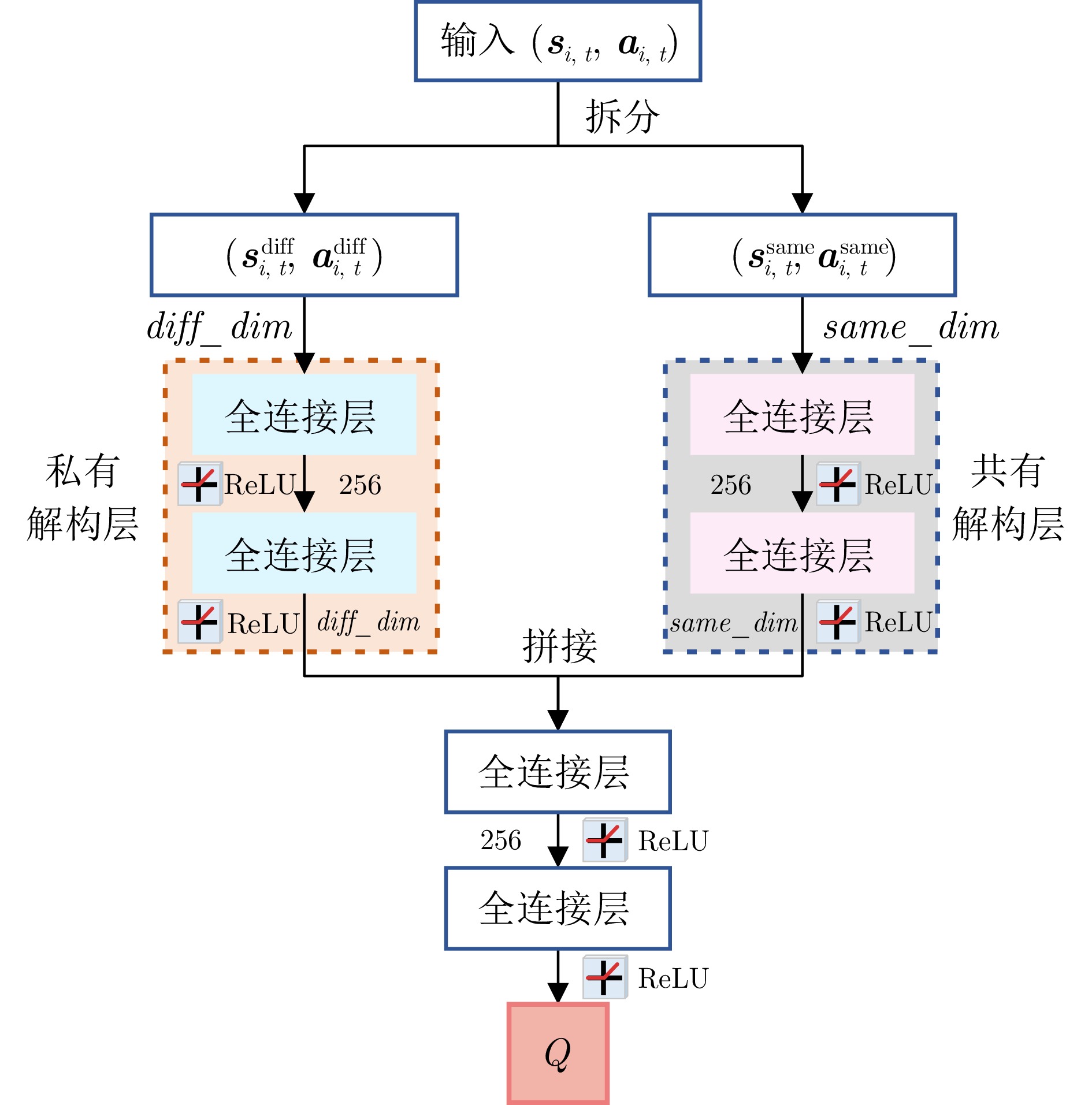
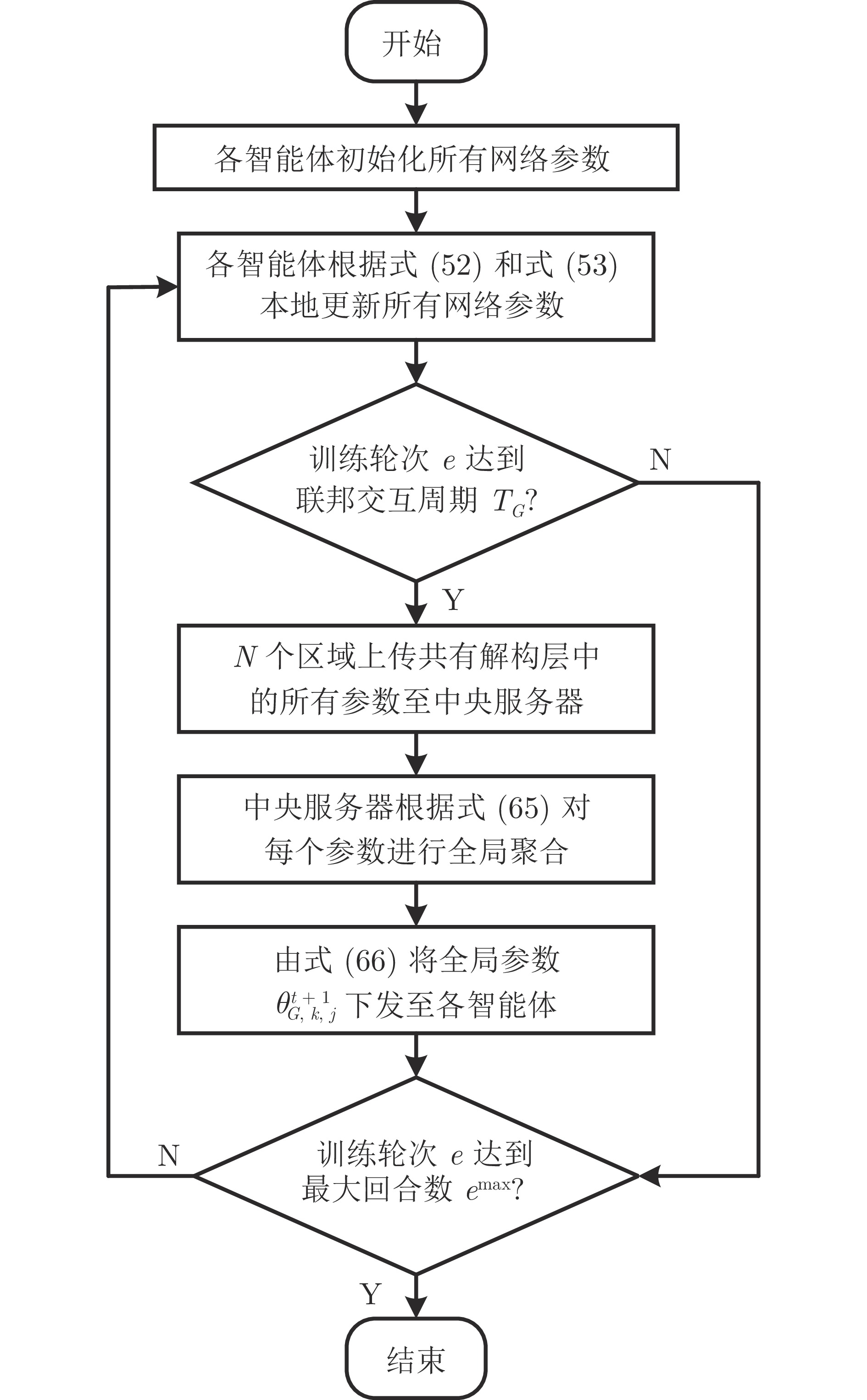
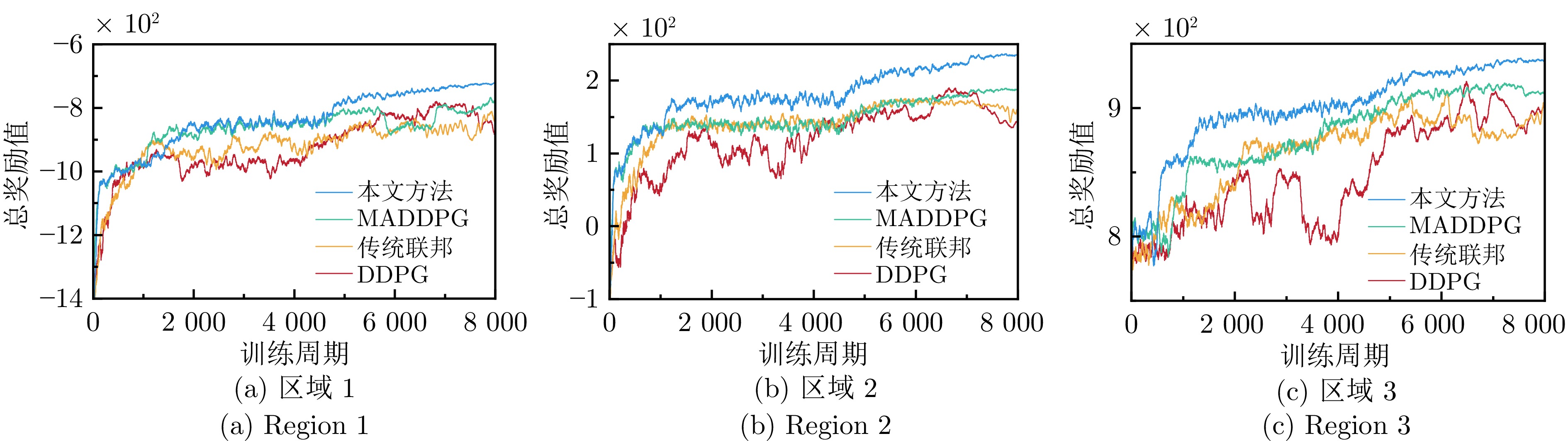
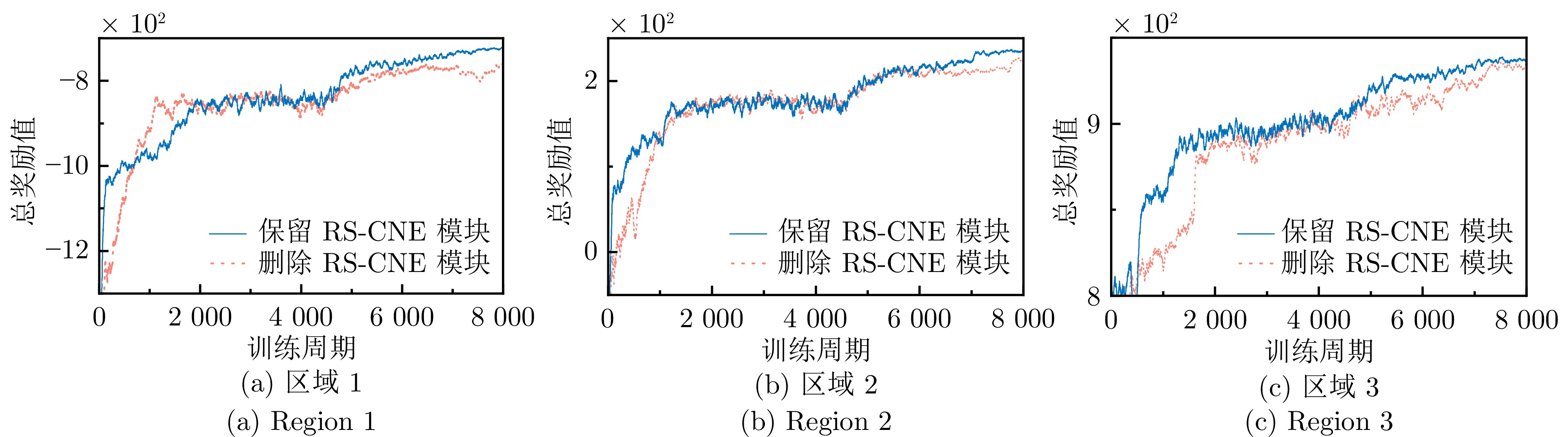
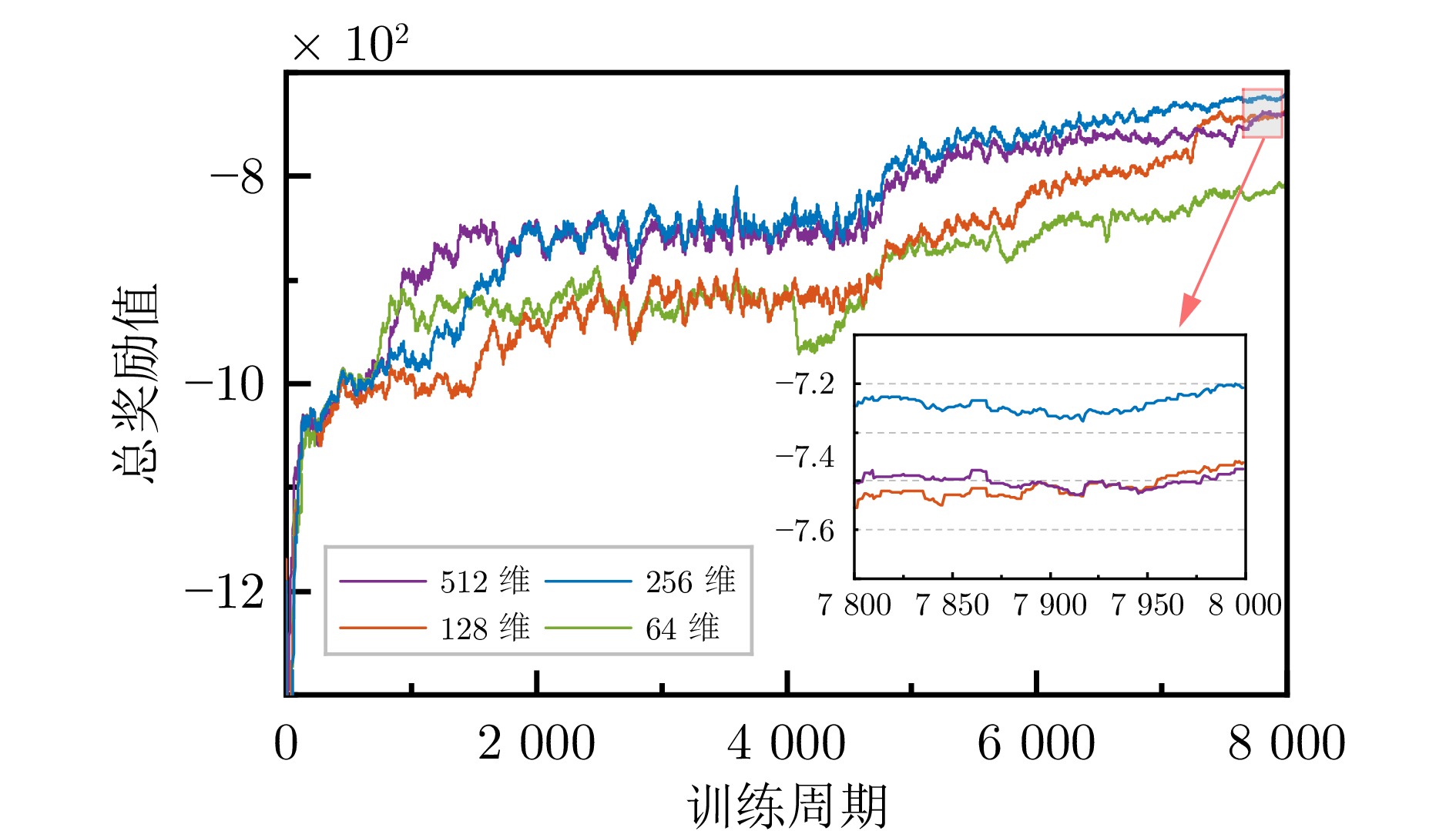
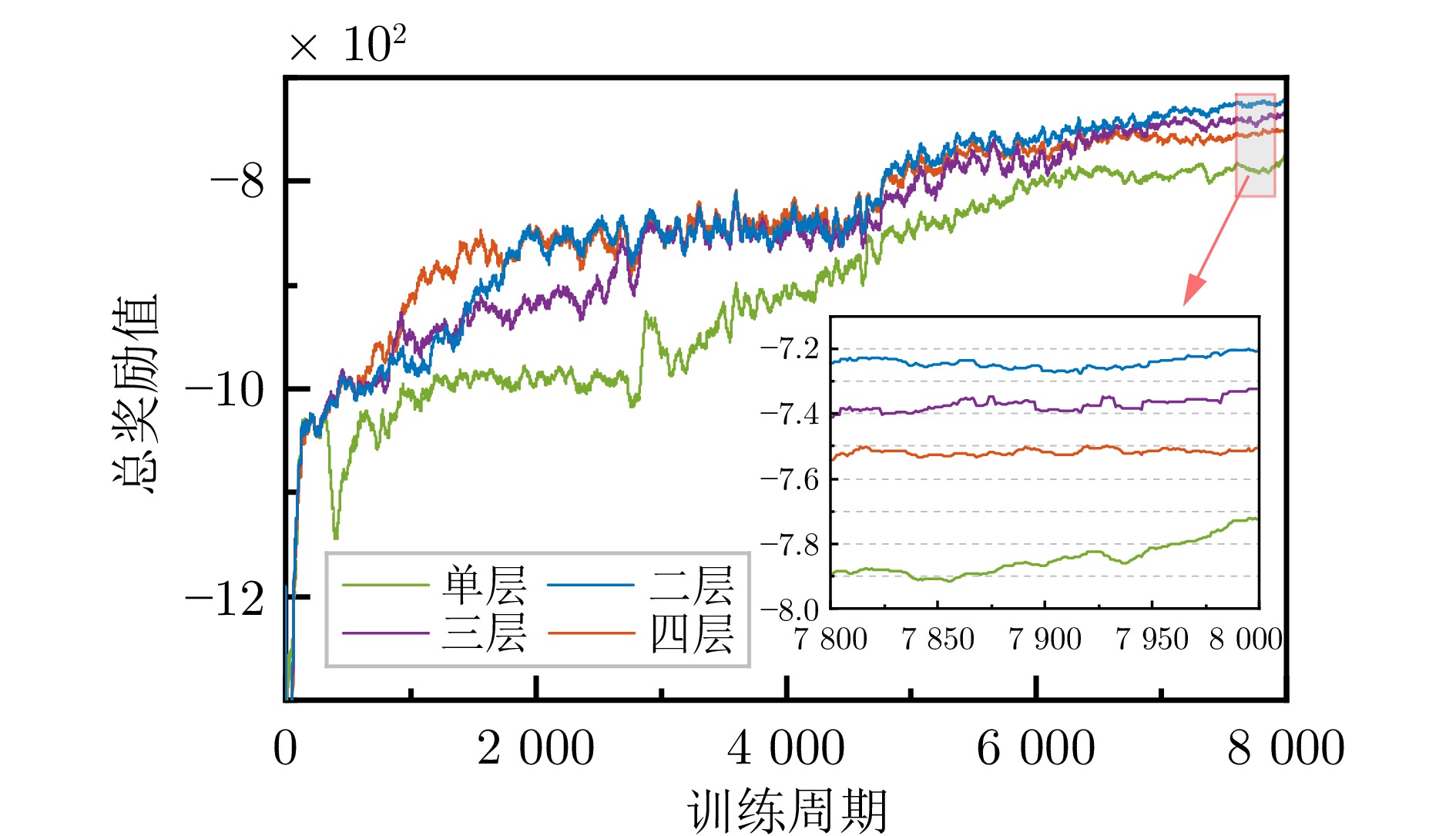
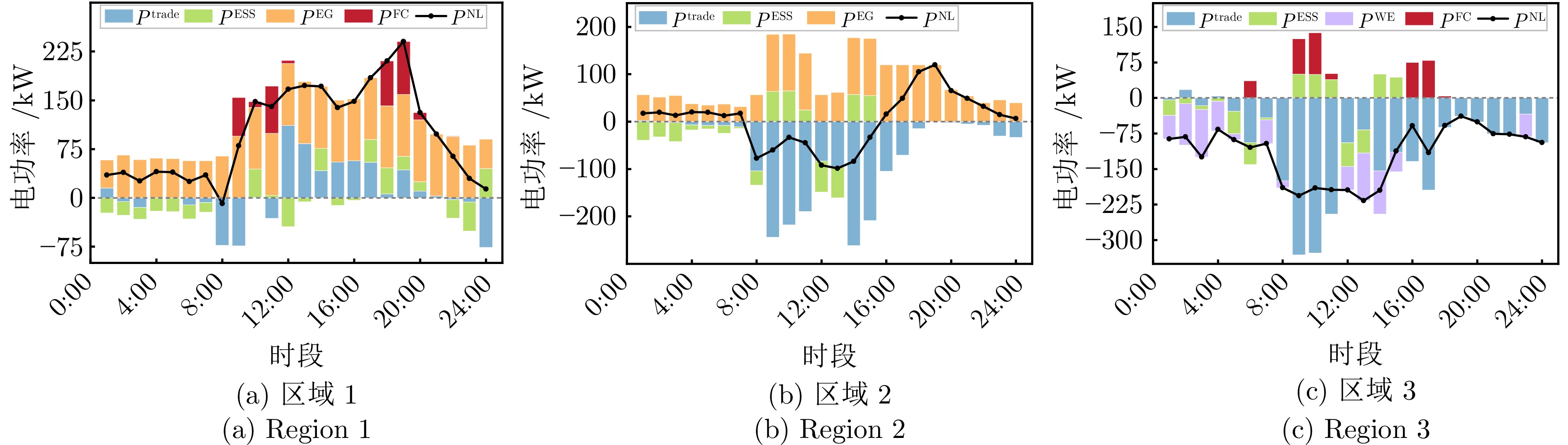
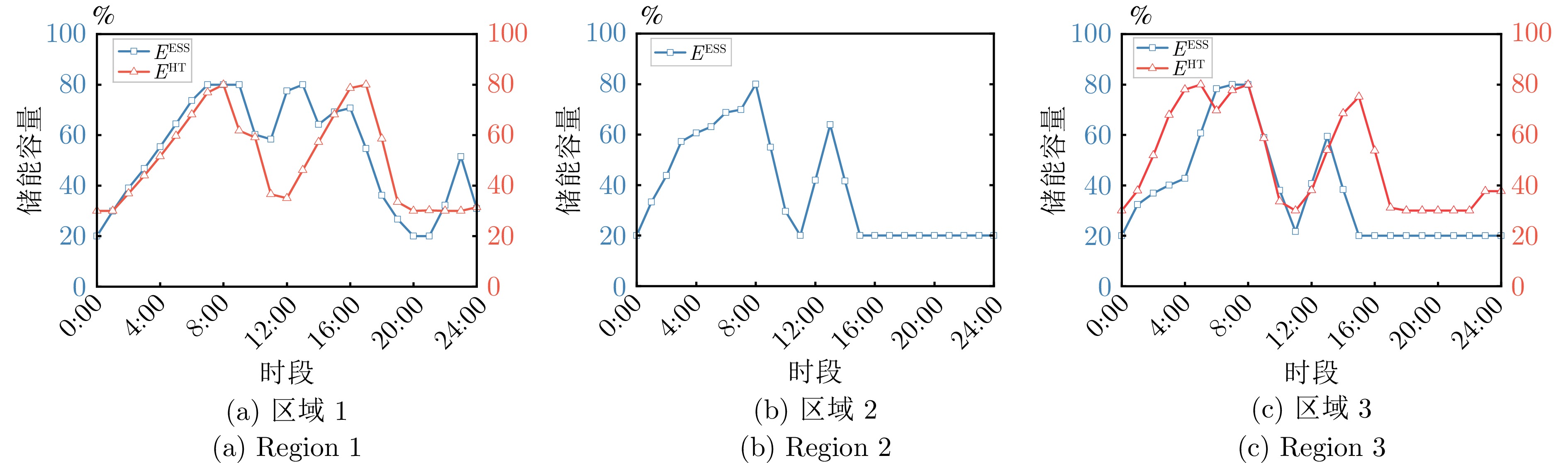
针对多智能体强化学习中隐私泄露及联邦强化学习在多微网设备异构环境下失效的问题, 提出一种基于个性化联邦强化学习的异构多区域微电网能量调度方法. 该方法将状态−动作对拆分为“私有”和“共有”两类, 分别输入模块化Critic网络中的私有解构层和公有解构层, 仅在公有层中部署联邦框架, 既实现公共设备网络参数的同步共享, 又保留各区域私有设备的个性化训练, 从而在保护数据隐私的前提下完成协同优化; 同时, 引入多Critic网络随机抽样架构进行本地训练, 有效缓解Q值高估导致的策略性能下降问题. 最后, 基于三类典型微电网模型构成的异构多区域微网系统开展仿真实验. 结果表明该方法可有效克服设备异构限制, 使区域智能体快速收敛至接近最优的策略, 合理分配设备出力, 实现多微网实时能量调度并提升经济效益.
针对多智能体强化学习中隐私泄露及联邦强化学习在多微网设备异构环境下失效的问题, 提出一种基于个性化联邦强化学习的异构多区域微电网能量调度方法. 该方法将状态−动作对拆分为“私有”和“共有”两类, 分别输入模块化Critic网络中的私有解构层和公有解构层, 仅在公有层中部署联邦框架, 既实现公共设备网络参数的同步共享, 又保留各区域私有设备的个性化训练, 从而在保护数据隐私的前提下完成协同优化; 同时, 引入多Critic网络随机抽样架构进行本地训练, 有效缓解Q值高估导致的策略性能下降问题. 最后, 基于三类典型微电网模型构成的异构多区域微网系统开展仿真实验. 结果表明该方法可有效克服设备异构限制, 使区域智能体快速收敛至接近最优的策略, 合理分配设备出力, 实现多微网实时能量调度并提升经济效益.

2025, 51(9): 2085-2105.
doi: 10.16383/j.aas.c240760
cstr: 32138.14.j.aas.c240760
摘要:
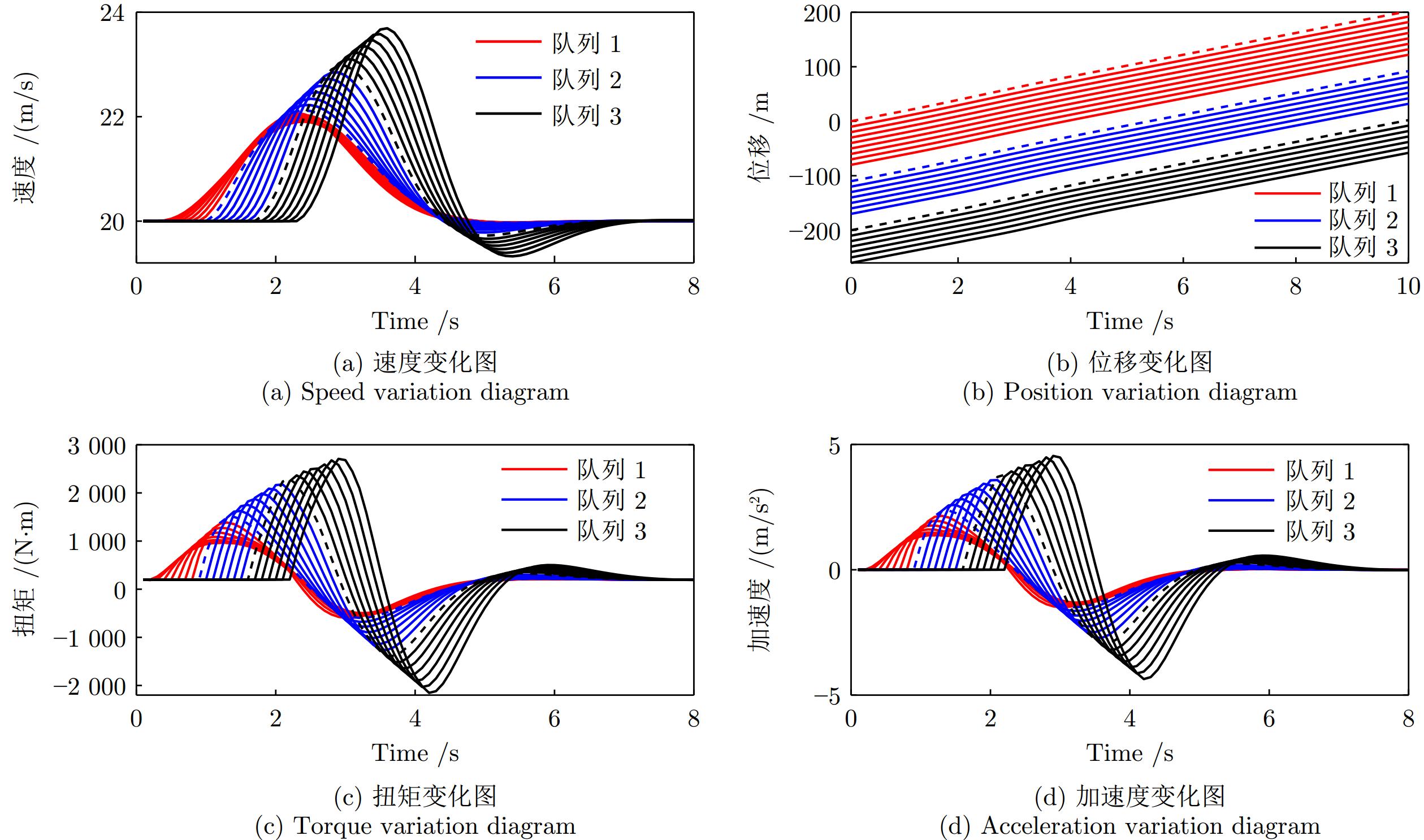
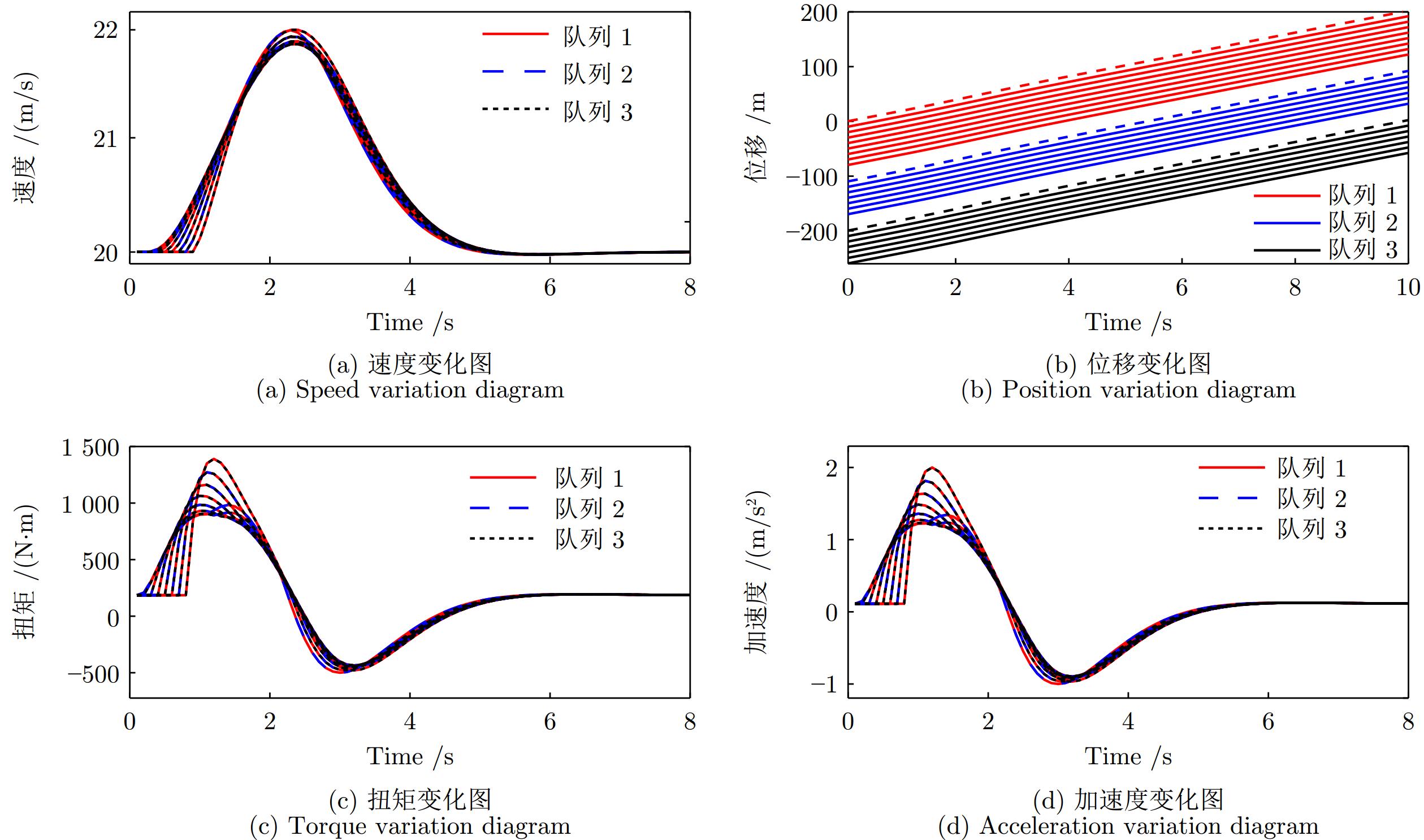
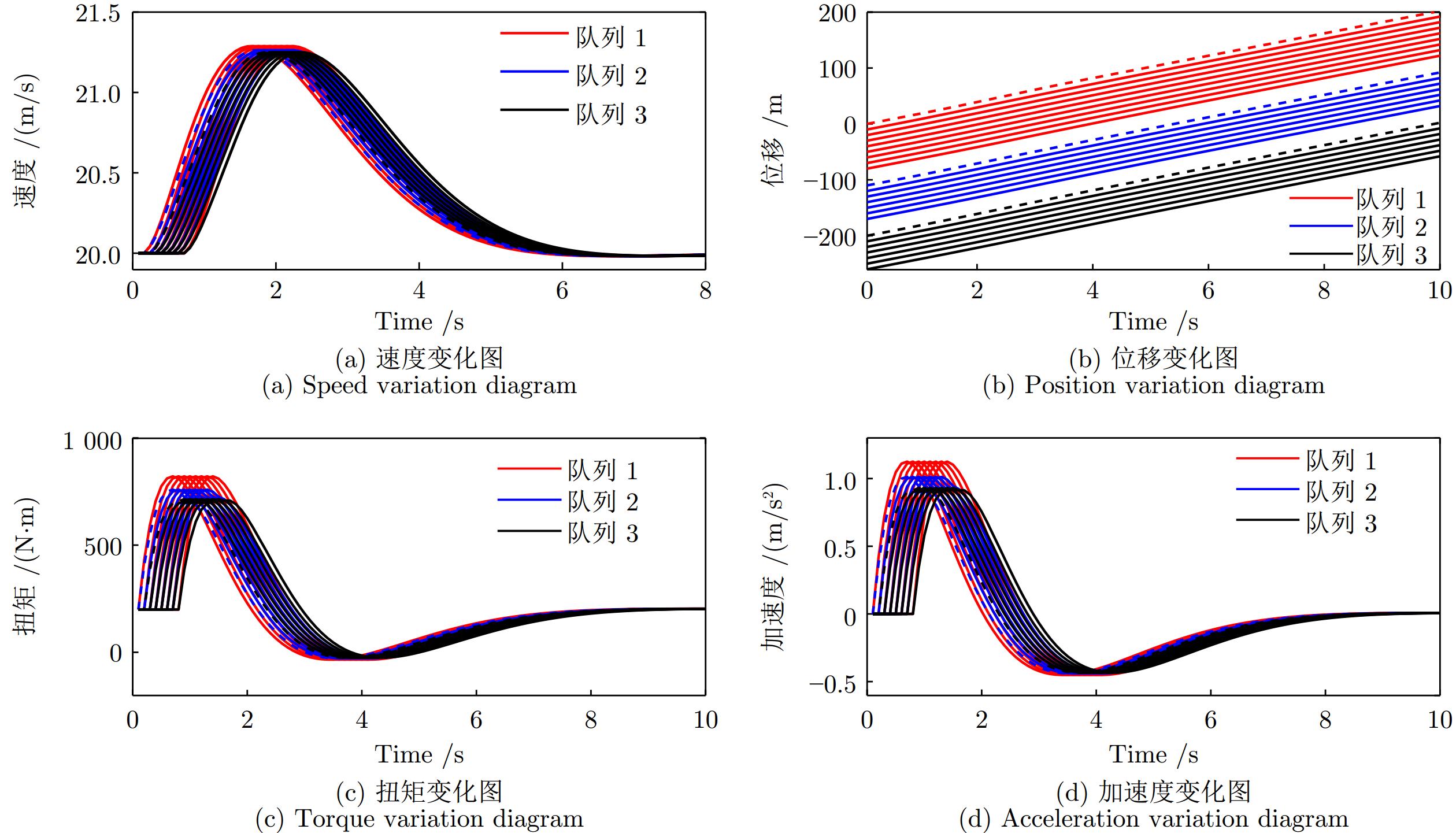
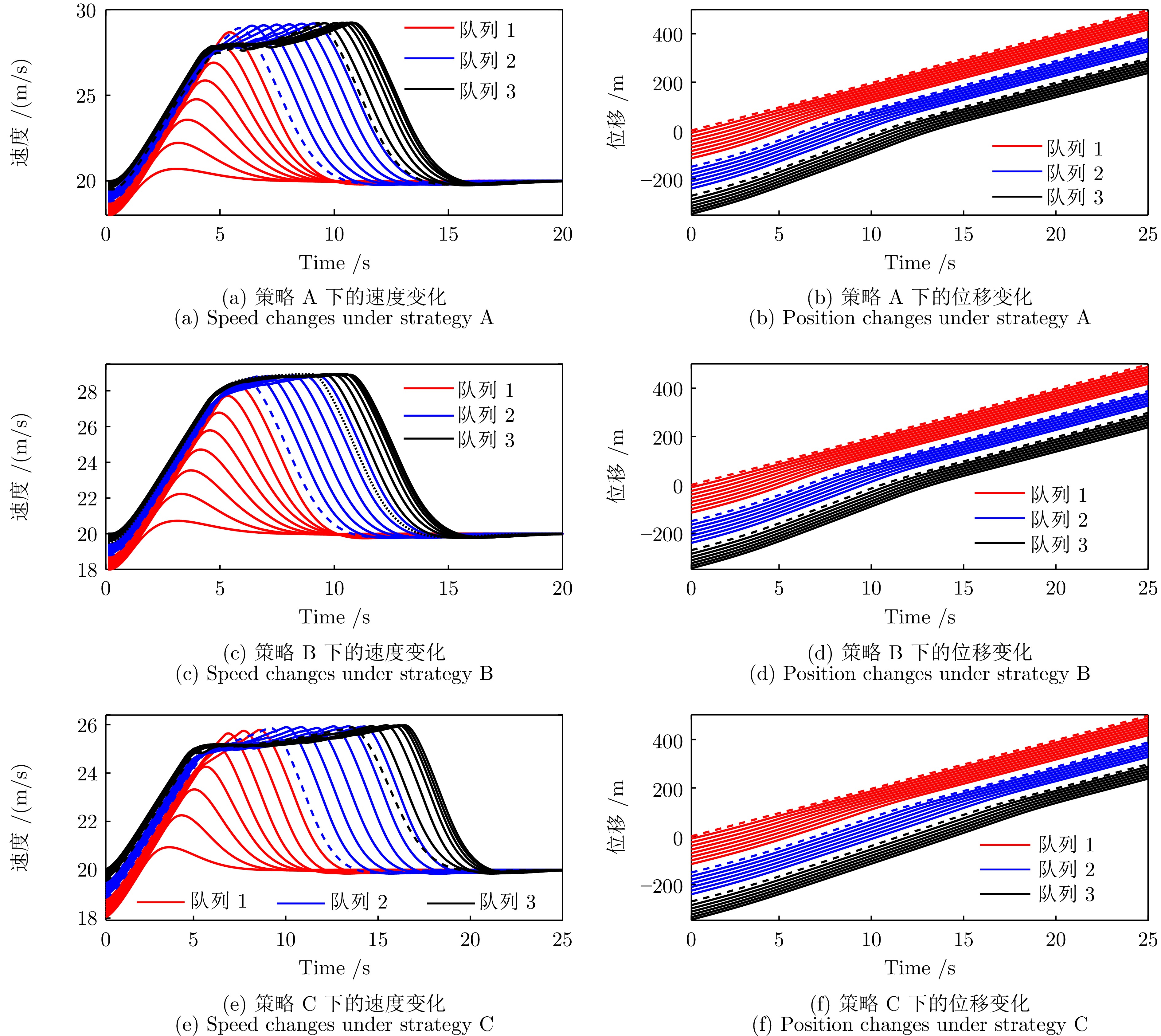
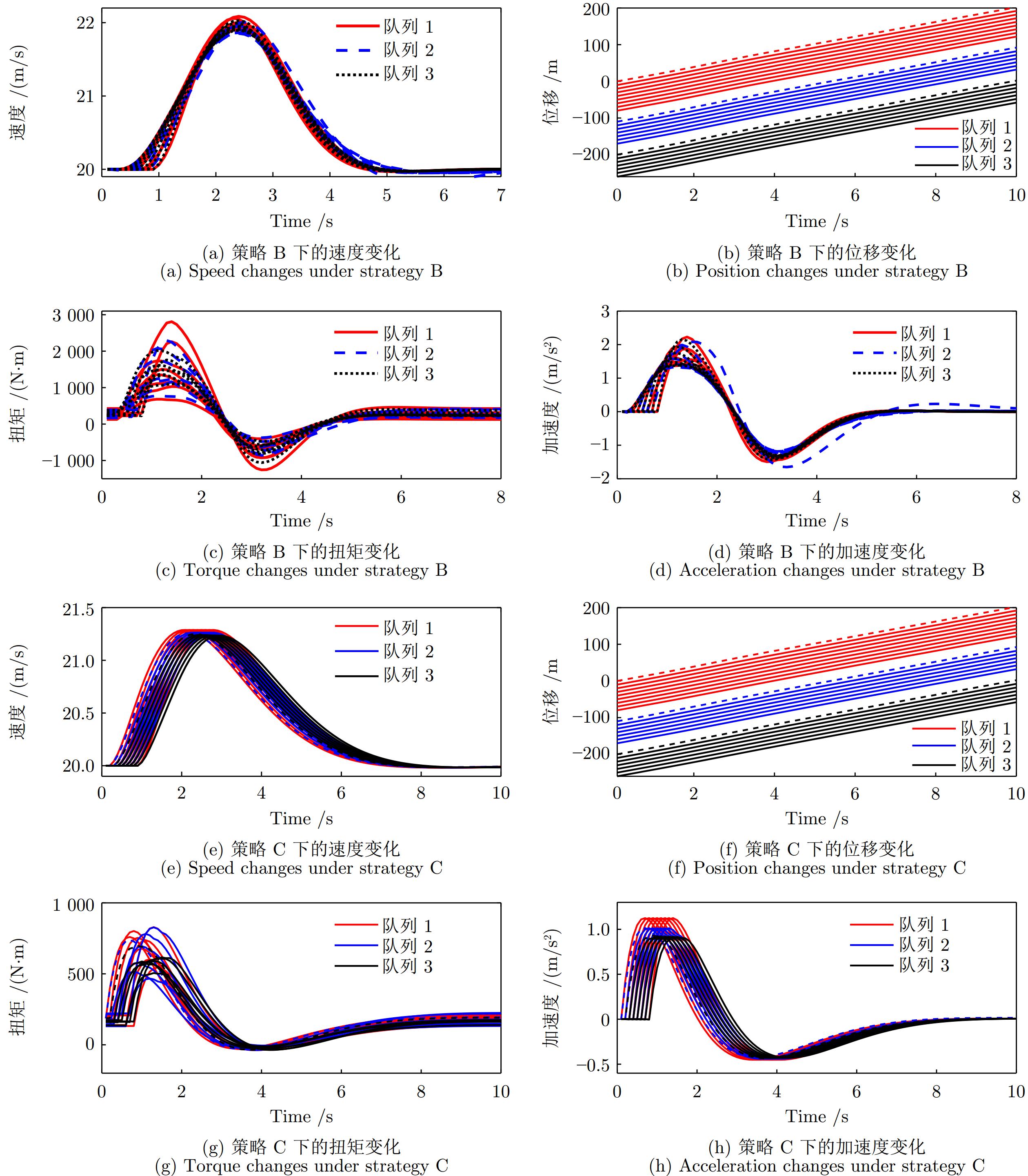
针对多队列系统中的车辆编队协同控制问题, 研究在单向通信结构下实现高效队列协同的方法. 首先, 建立多队列系统的车辆动力学模型, 设计以各队列领航车为根节点的全局通信拓扑, 以支持信息在队列内和队列间的传递. 基于此拓扑结构, 提出一种包含队列内和队列间耦合约束的分布式模型预测控制方法, 分别针对队列内跟随车辆和队列间领航车辆制定不同的局部优化问题, 以实现车辆和队列的并行优化. 其次, 通过Lyapunov稳定性分析, 证明所提控制方法在单向通信拓扑下的渐近稳定性, 并推导保证系统弦稳定性的参数设计条件. 数值仿真对比分析了三种队列间通信拓扑结构(领航车−尾车跟踪、领航车−领航车跟踪、领航车与领航车−尾车结合策略)的控制性能. 结果表明, 领航车与领航车−尾车结合策略在响应速度和系统稳定性之间达到最佳平衡. 此外, 研究还验证了所提方法对不同惯性滞后参数和异质车辆特性的适应能力, 为多队列车辆系统的协同控制提供理论基础和实用方法, 对智能交通系统的实际应用具有重要参考价值.
针对多队列系统中的车辆编队协同控制问题, 研究在单向通信结构下实现高效队列协同的方法. 首先, 建立多队列系统的车辆动力学模型, 设计以各队列领航车为根节点的全局通信拓扑, 以支持信息在队列内和队列间的传递. 基于此拓扑结构, 提出一种包含队列内和队列间耦合约束的分布式模型预测控制方法, 分别针对队列内跟随车辆和队列间领航车辆制定不同的局部优化问题, 以实现车辆和队列的并行优化. 其次, 通过Lyapunov稳定性分析, 证明所提控制方法在单向通信拓扑下的渐近稳定性, 并推导保证系统弦稳定性的参数设计条件. 数值仿真对比分析了三种队列间通信拓扑结构(领航车−尾车跟踪、领航车−领航车跟踪、领航车与领航车−尾车结合策略)的控制性能. 结果表明, 领航车与领航车−尾车结合策略在响应速度和系统稳定性之间达到最佳平衡. 此外, 研究还验证了所提方法对不同惯性滞后参数和异质车辆特性的适应能力, 为多队列车辆系统的协同控制提供理论基础和实用方法, 对智能交通系统的实际应用具有重要参考价值.



2025, 51(9): 2106-2130.
doi: 10.16383/j.aas.c250028
cstr: 32138.14.j.aas.c250028
摘要:
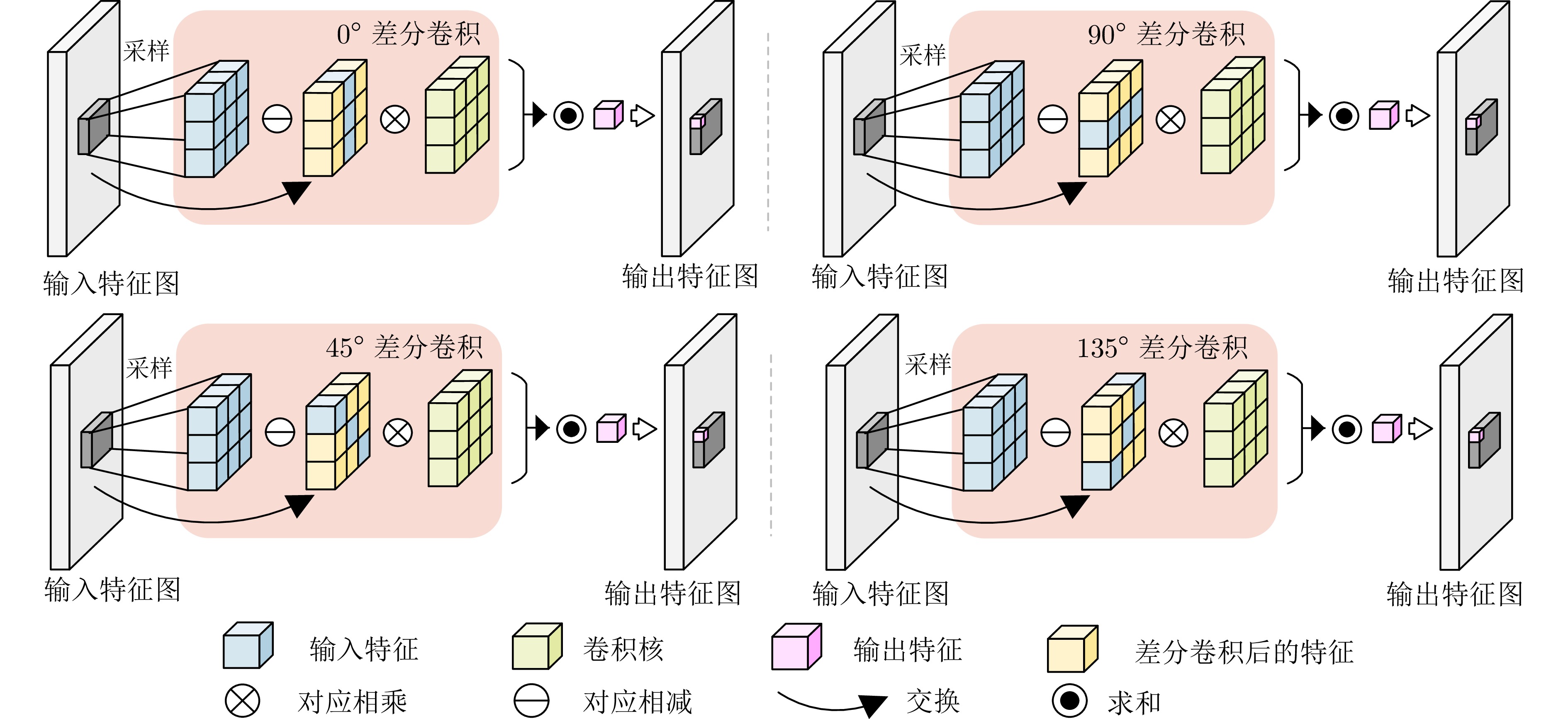
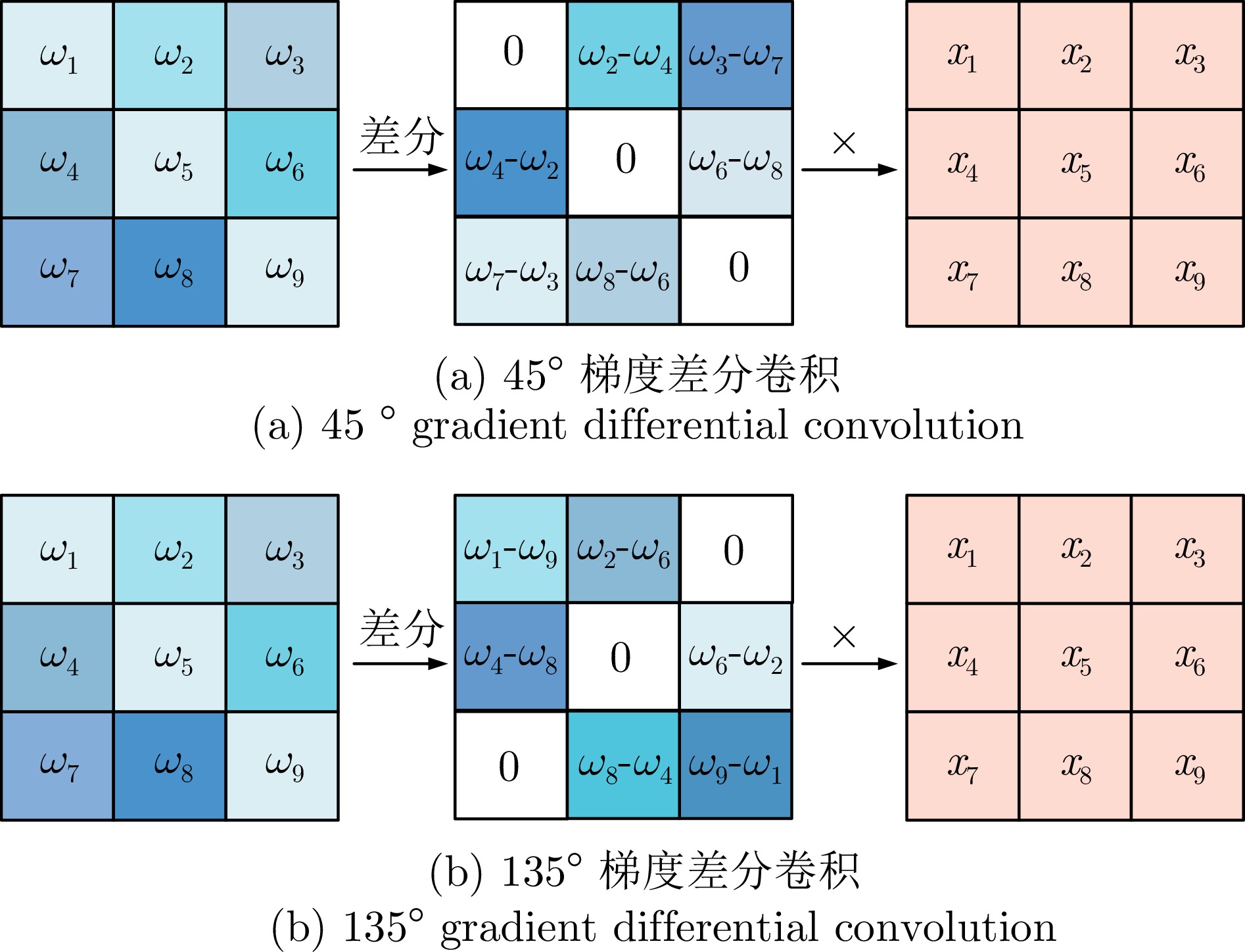
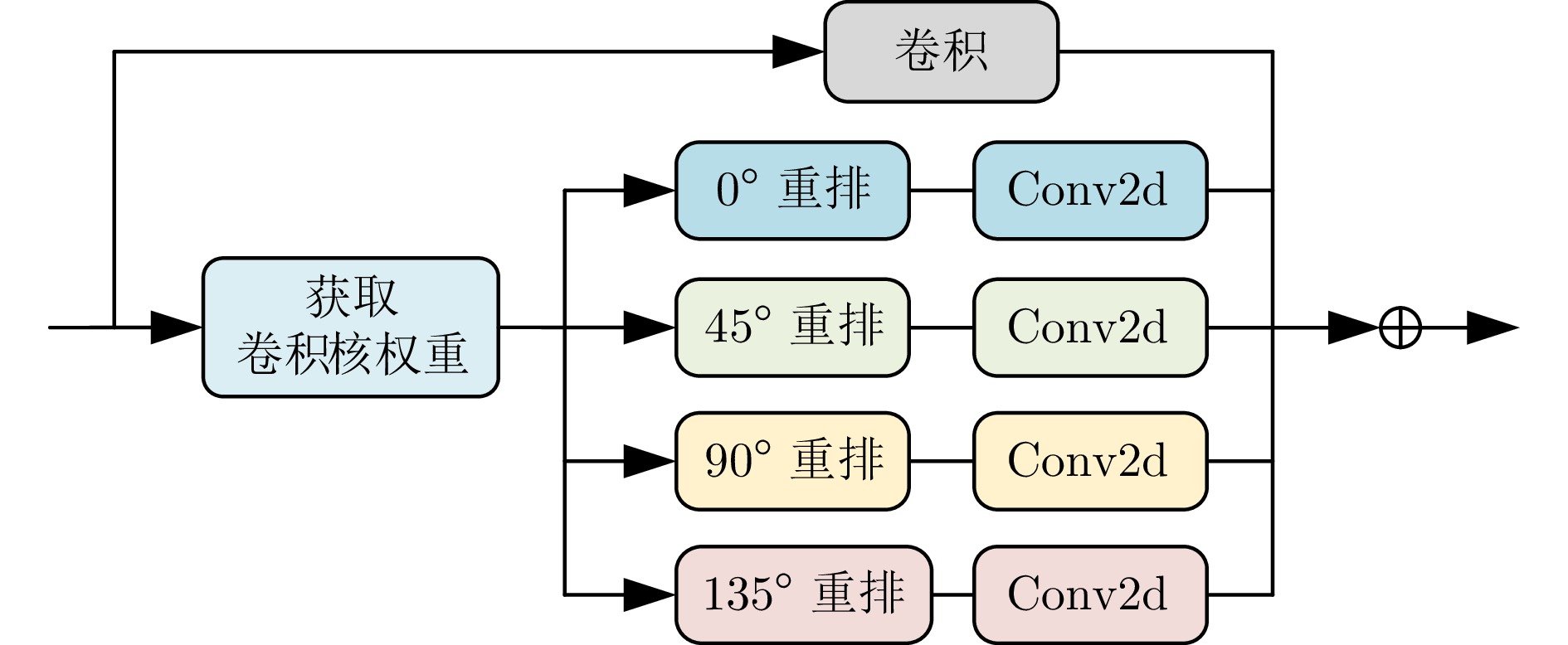
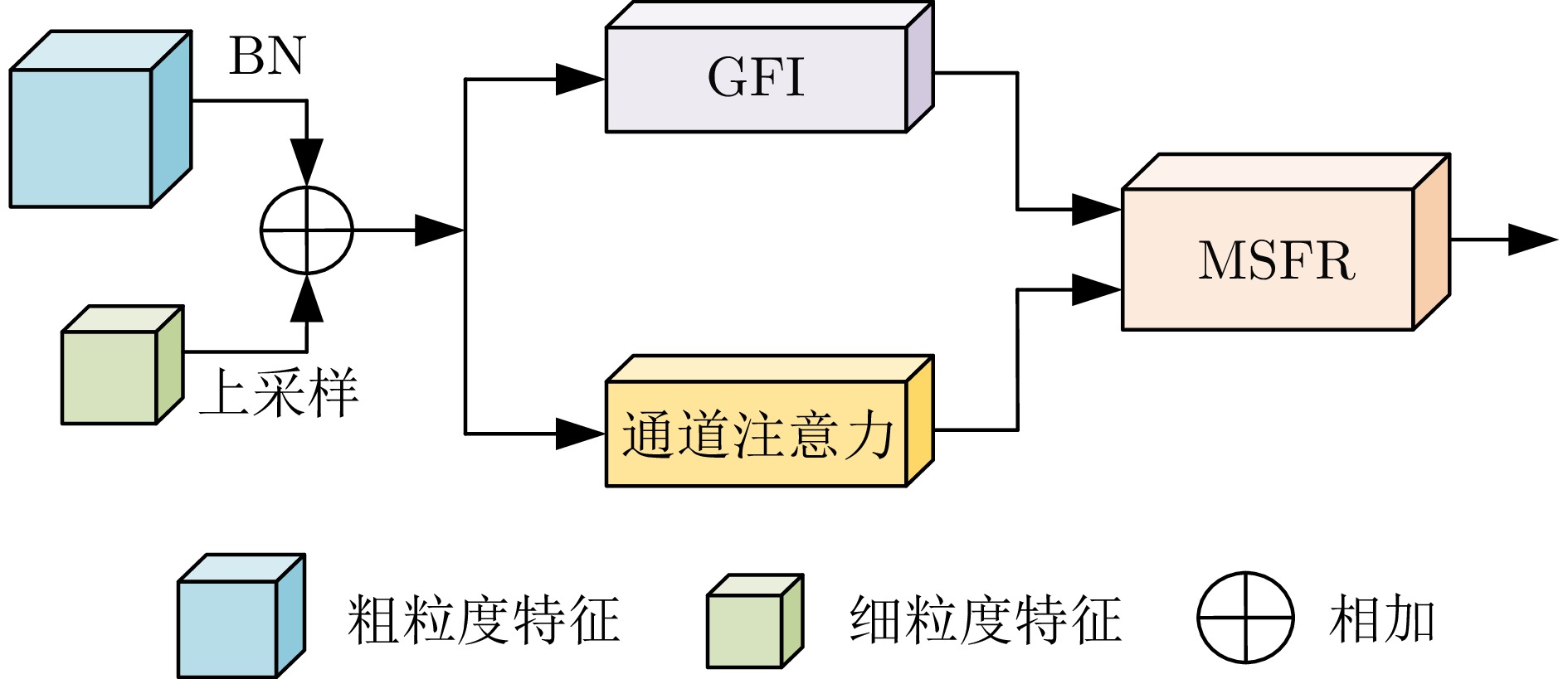
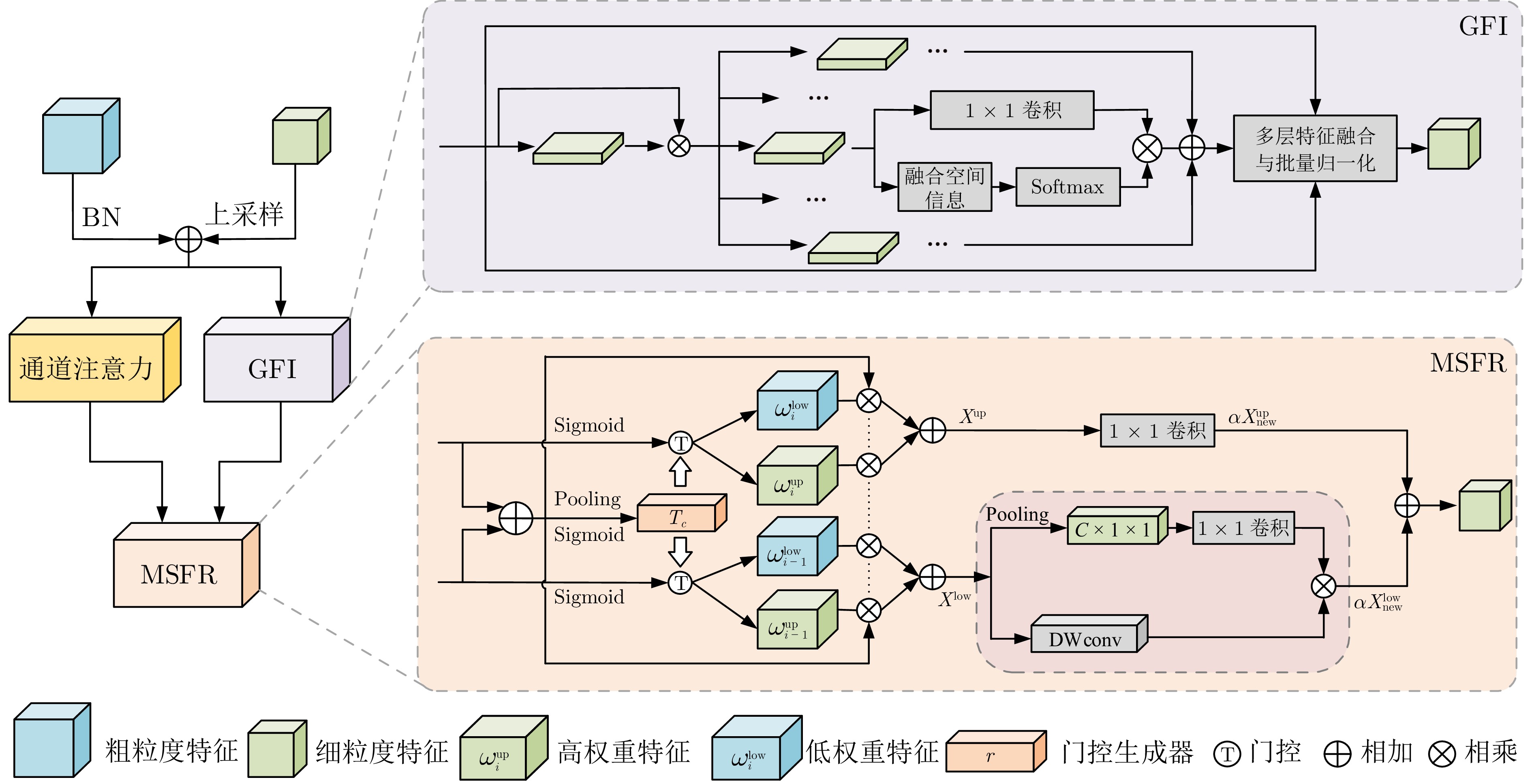
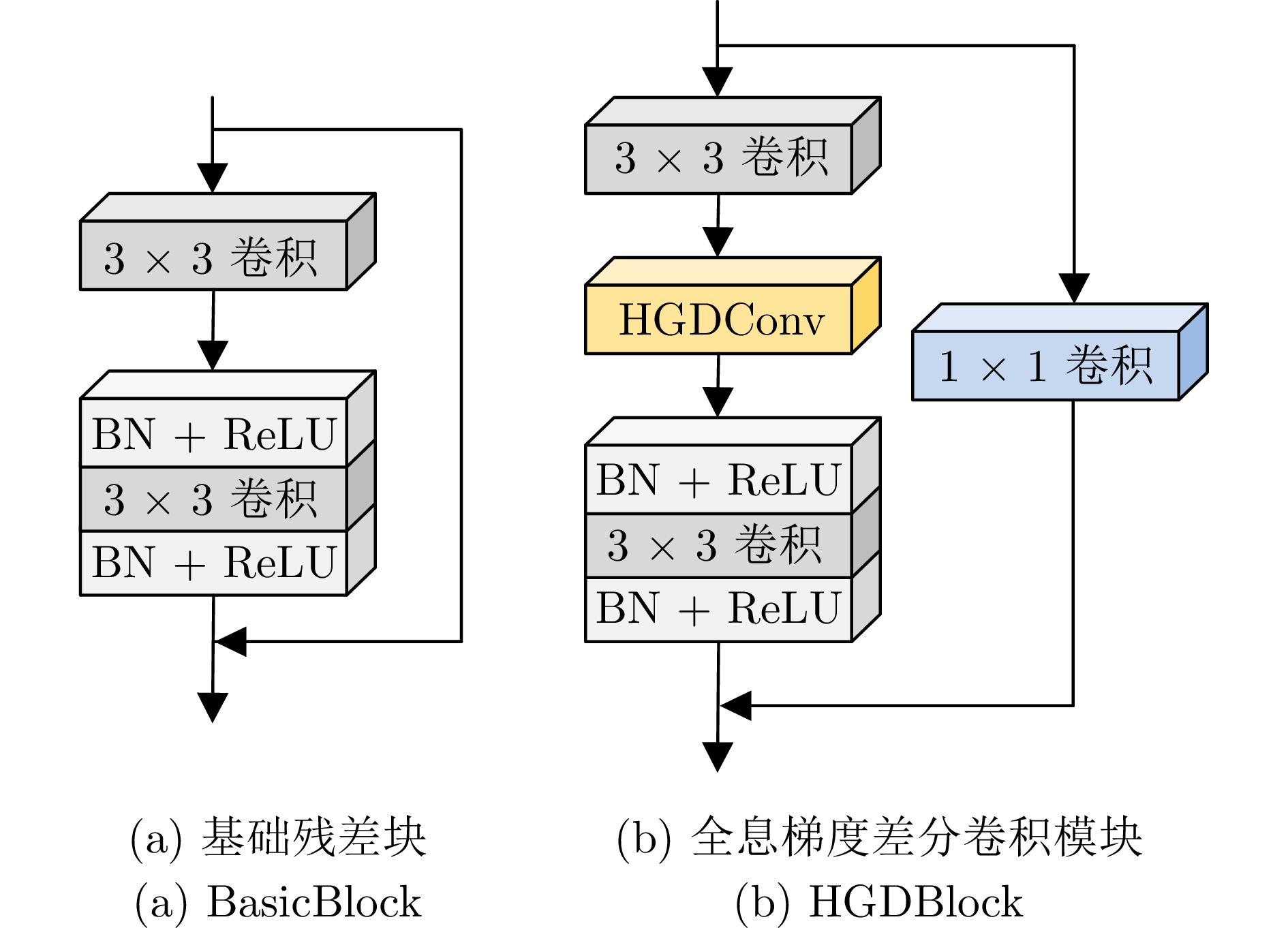
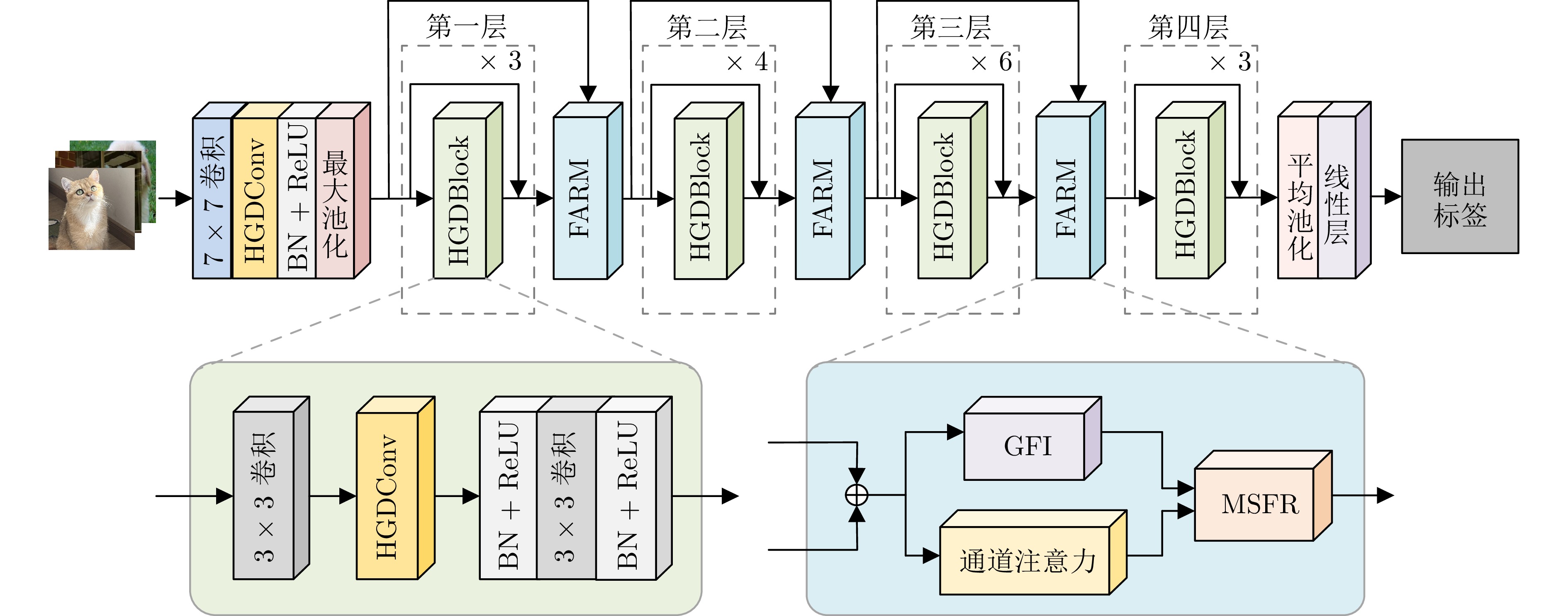
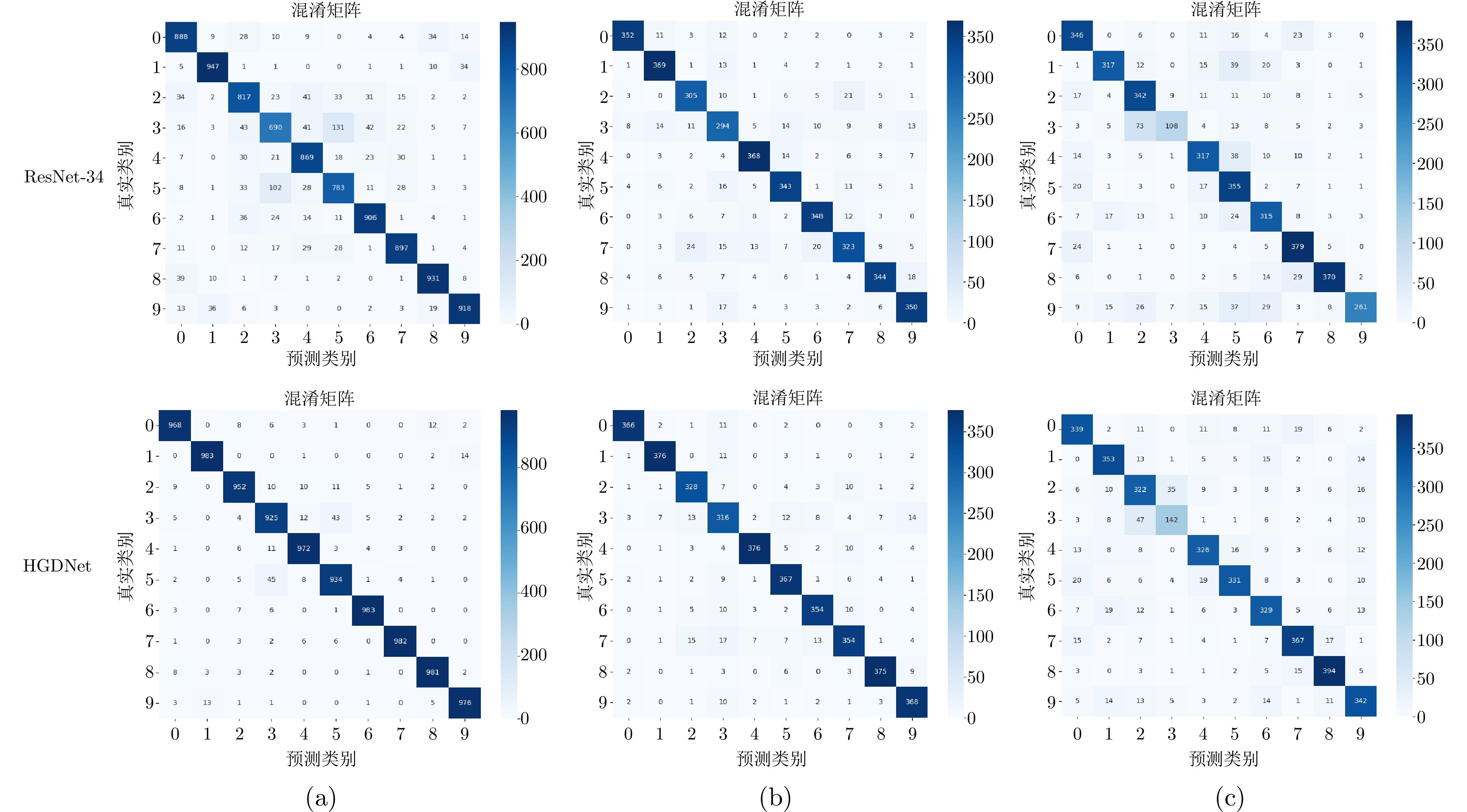
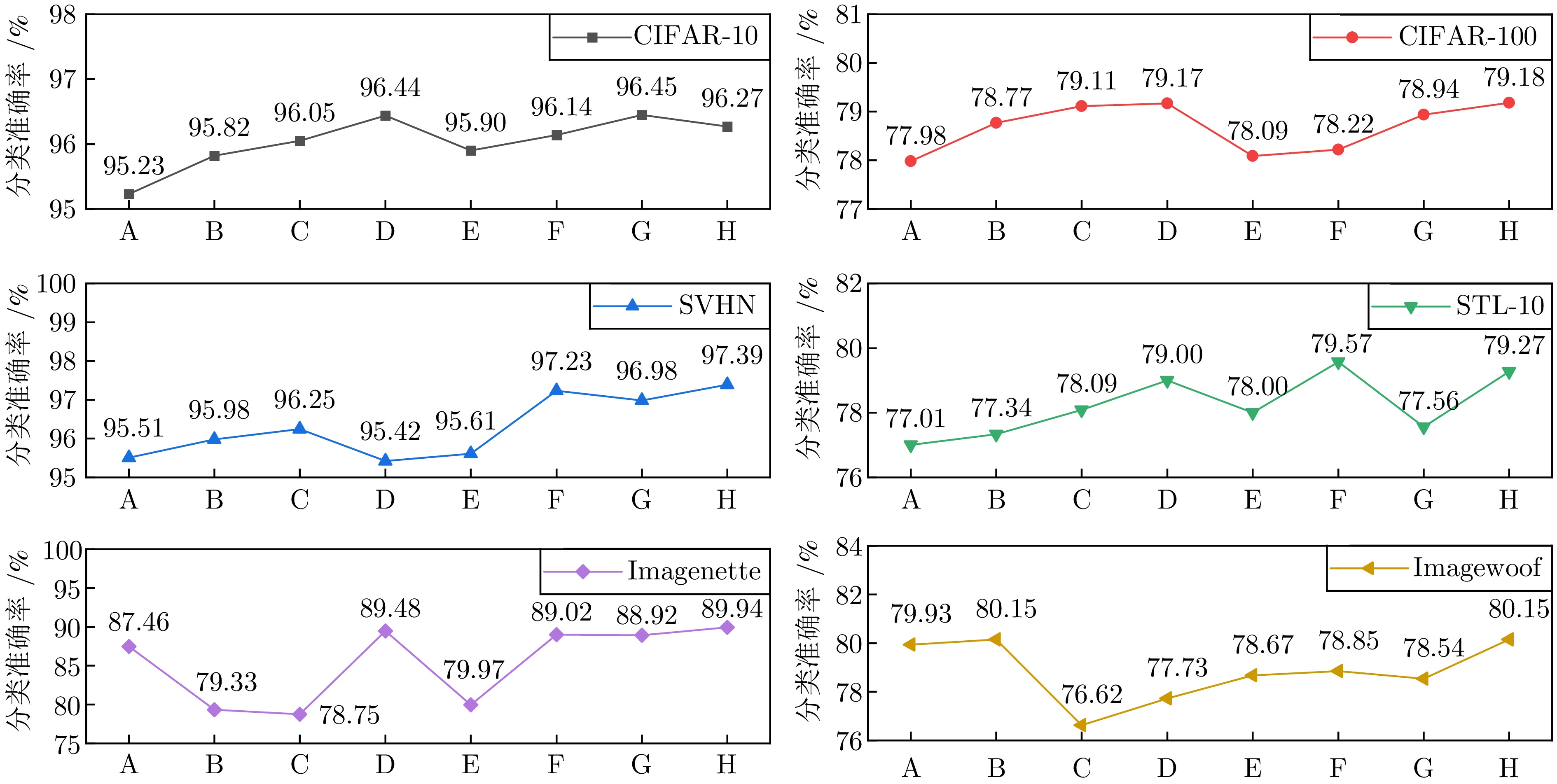
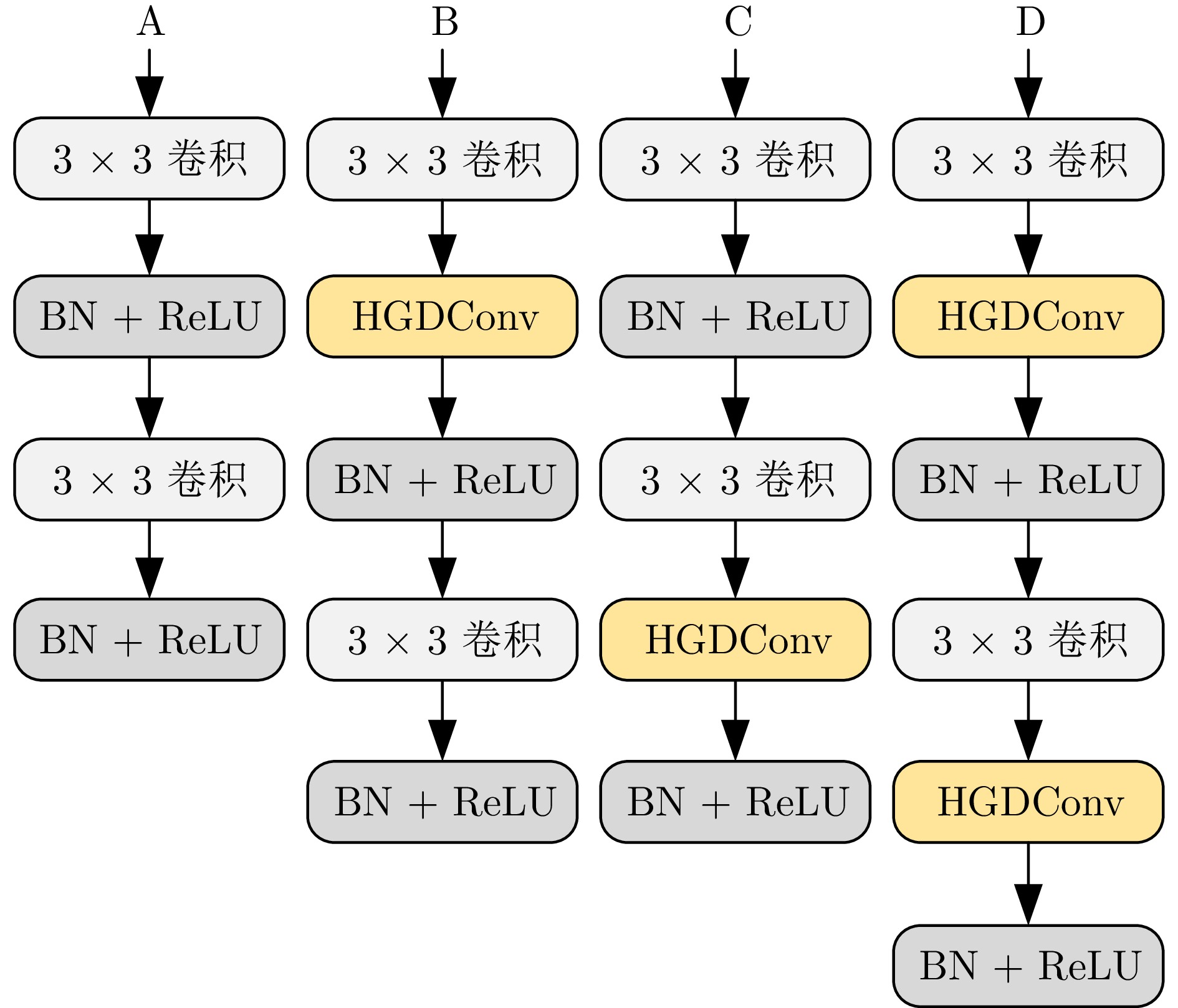
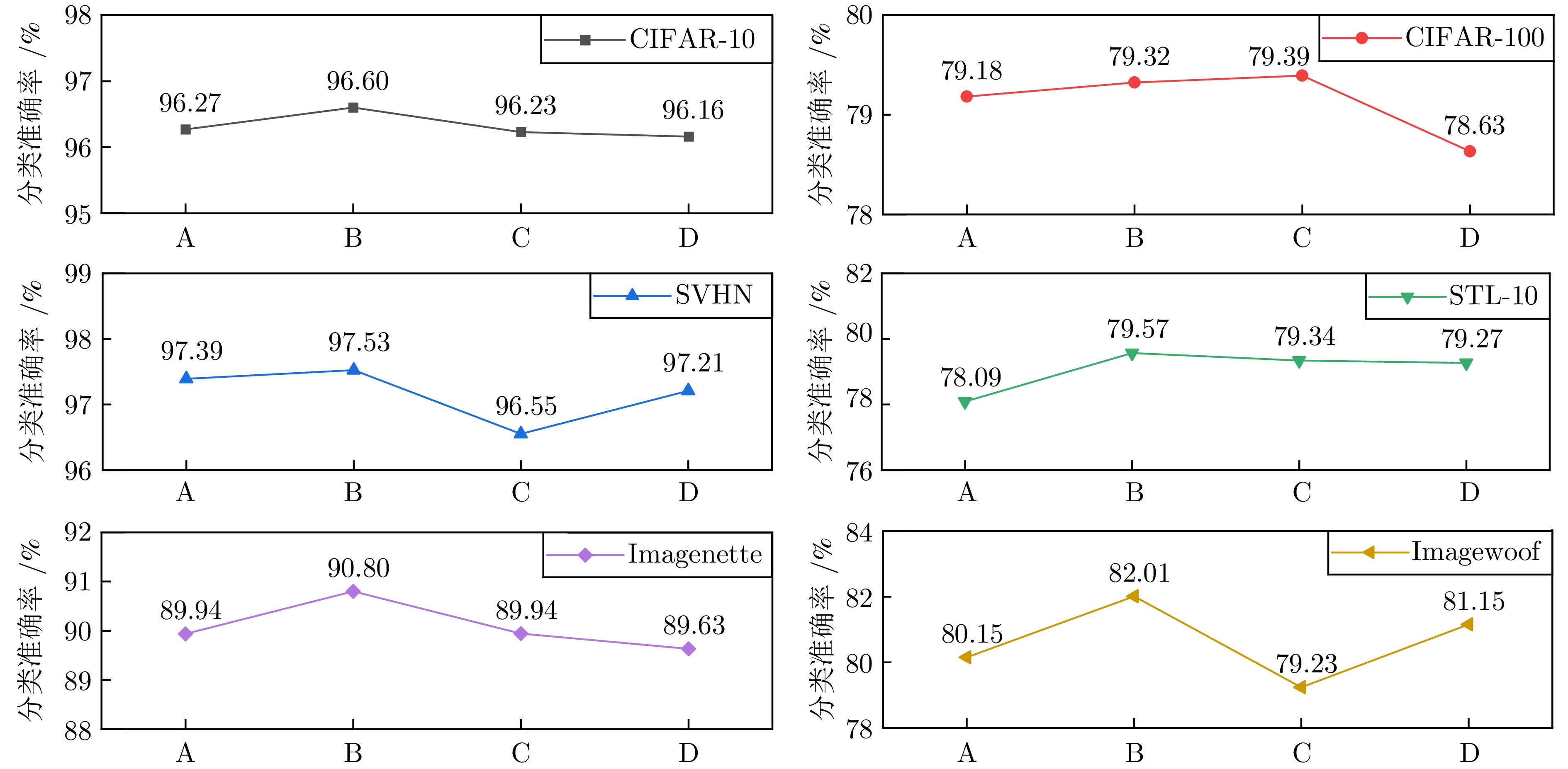
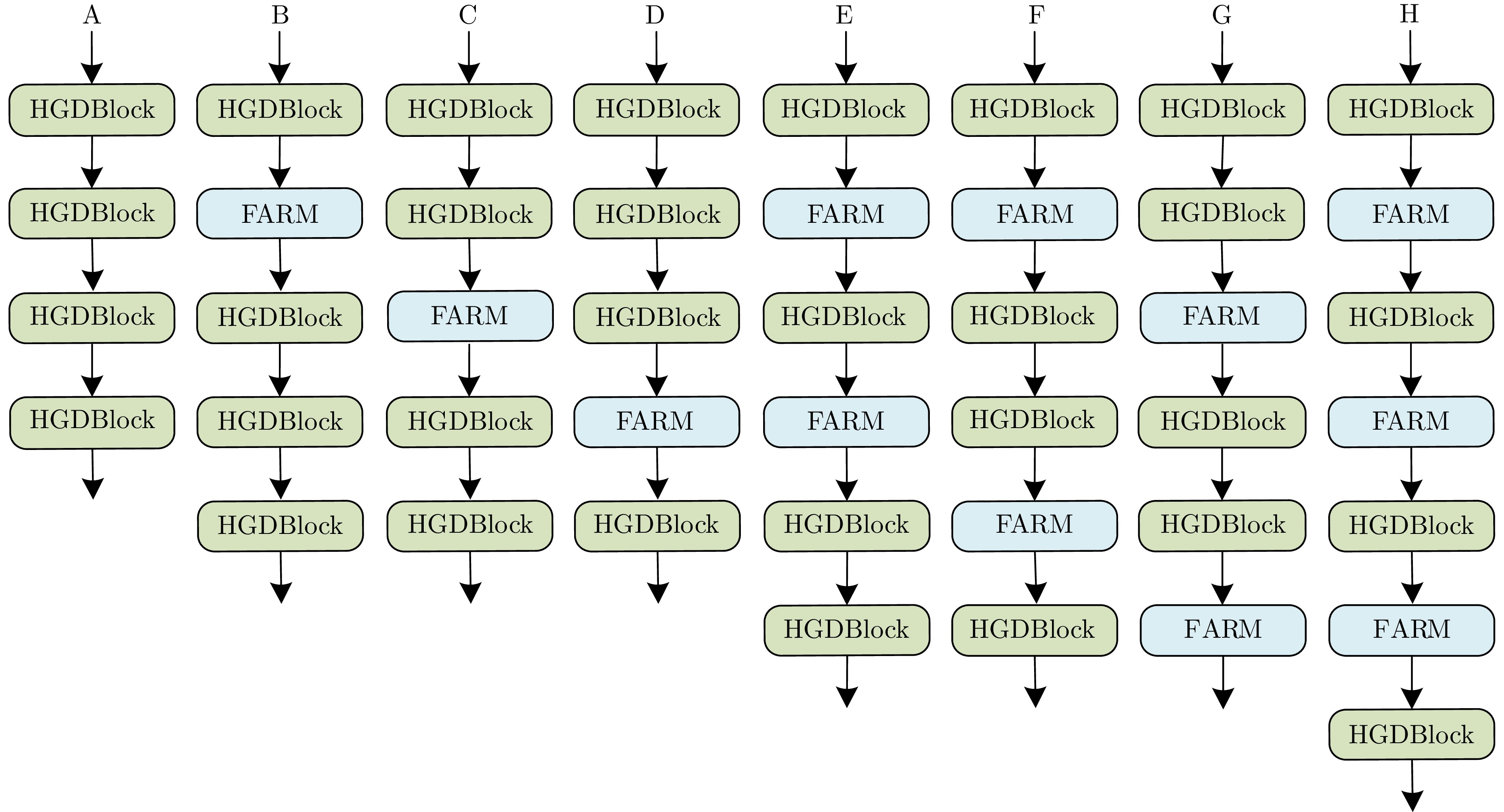
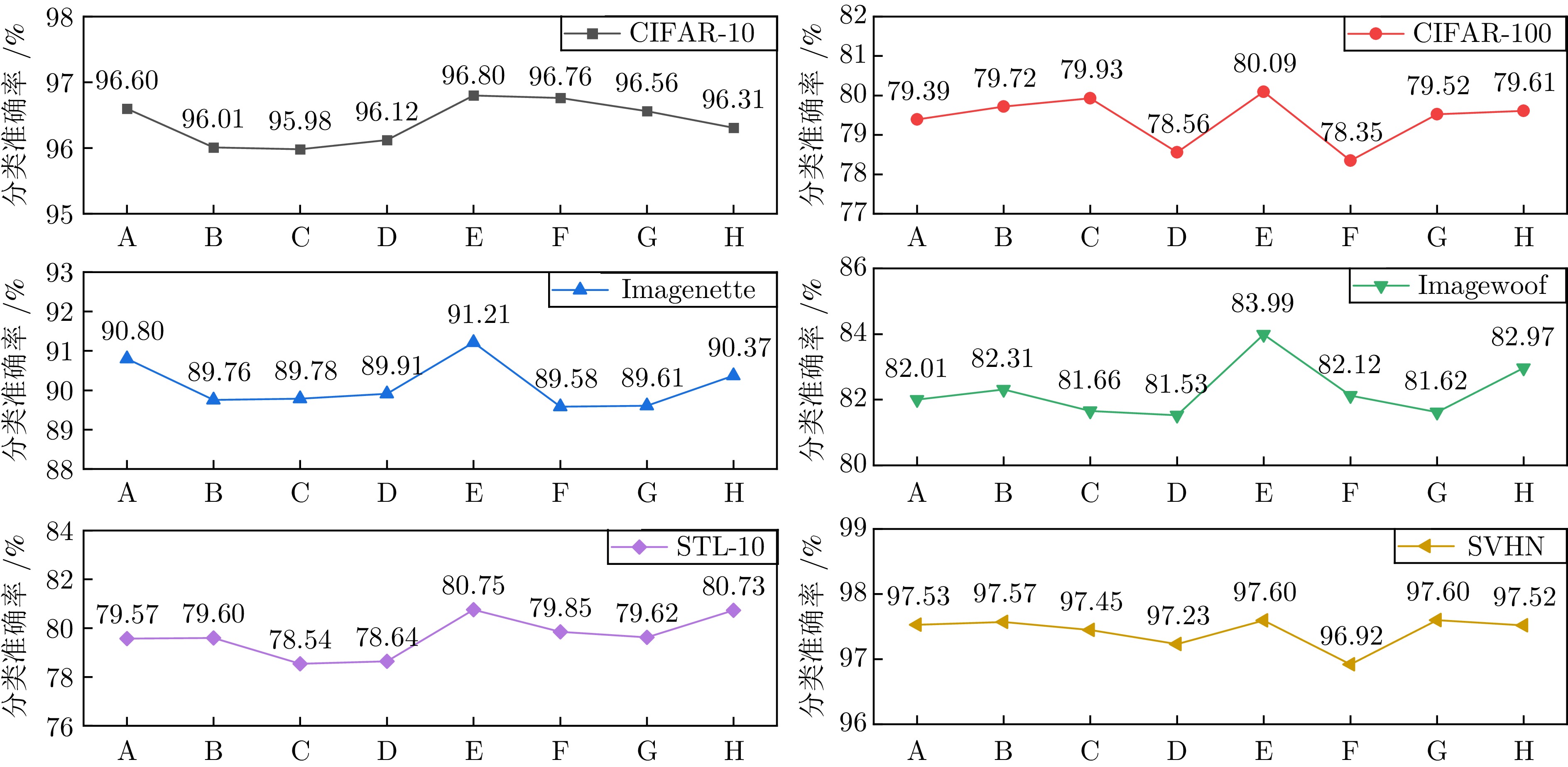
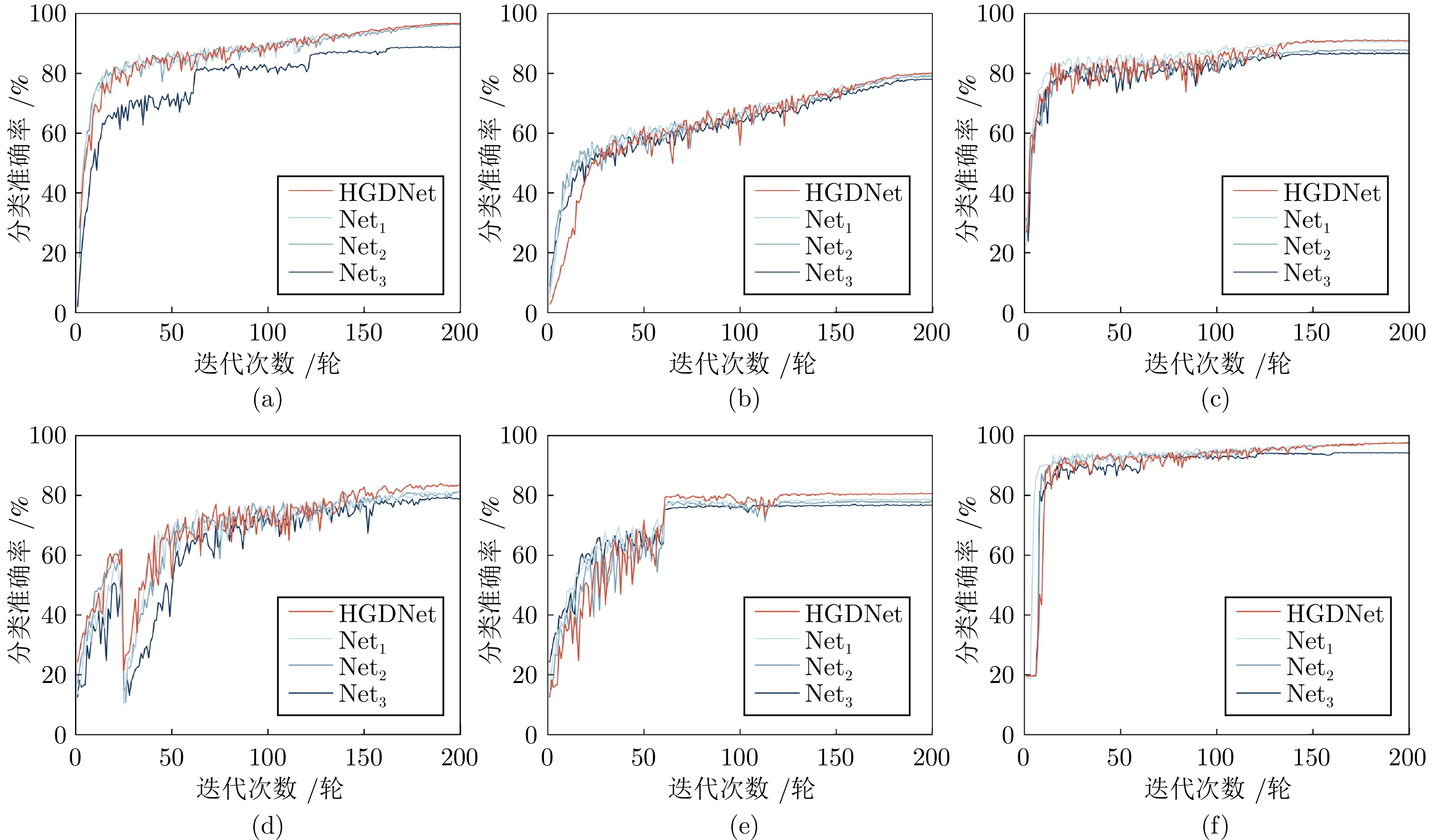
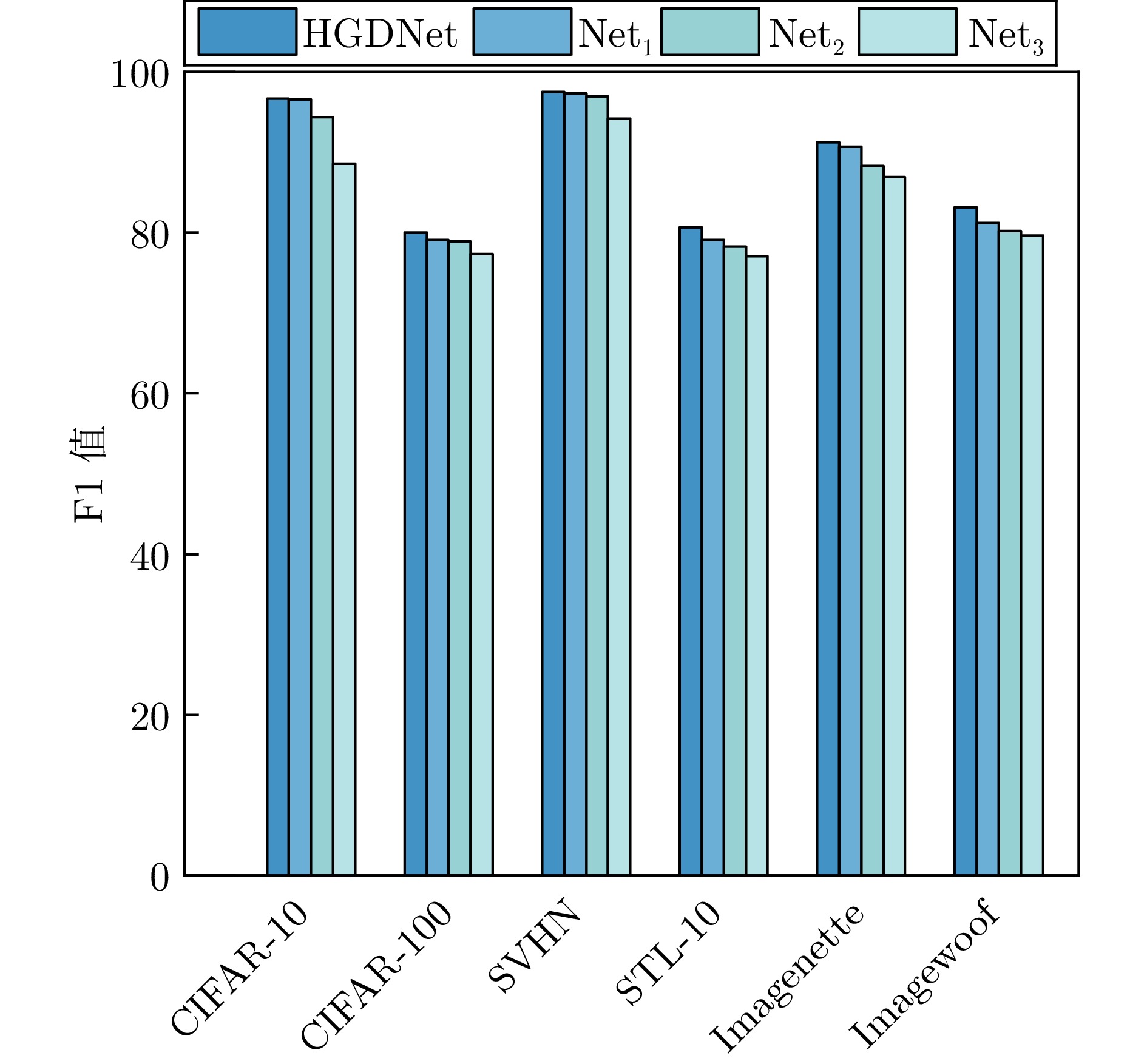
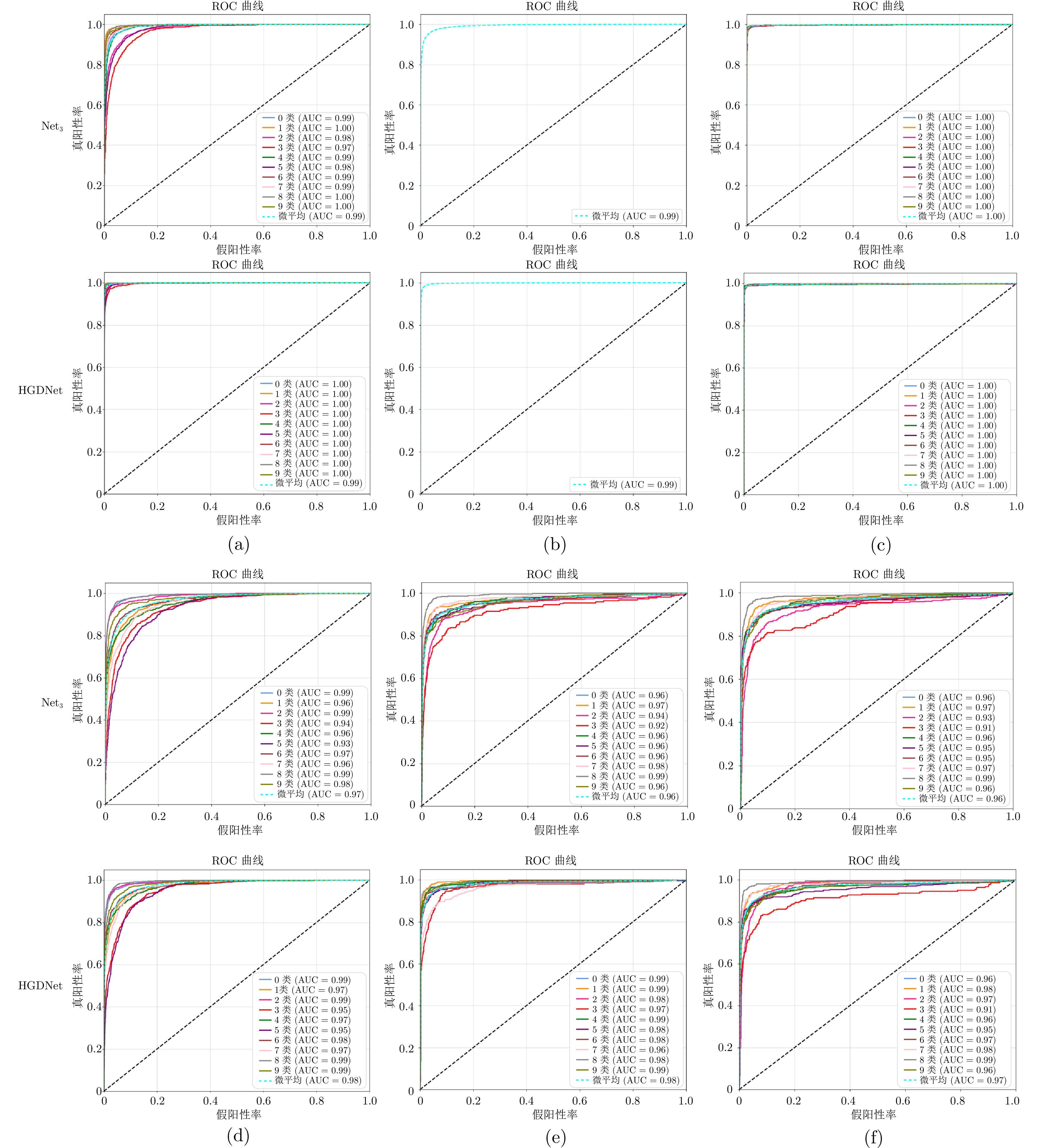
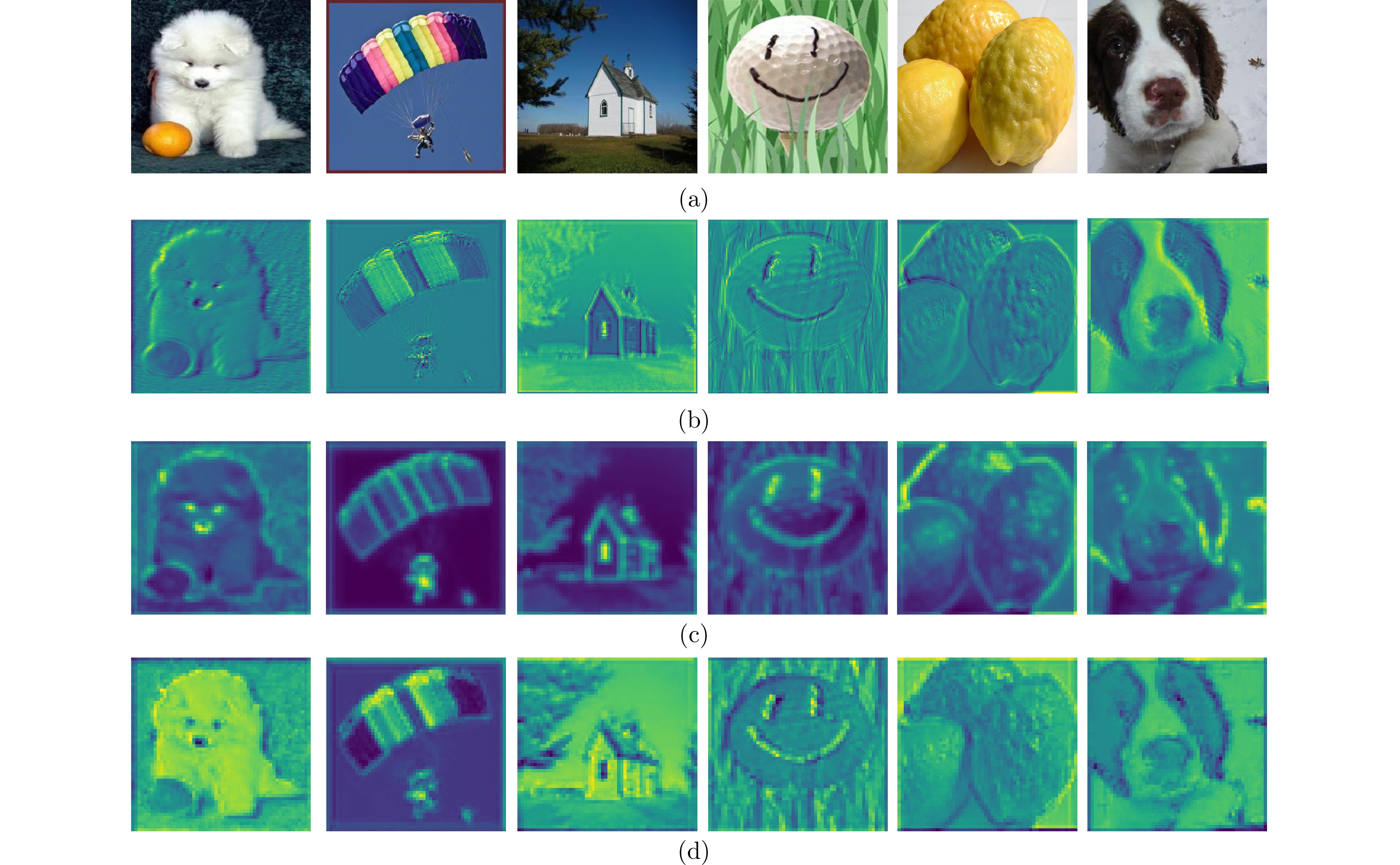
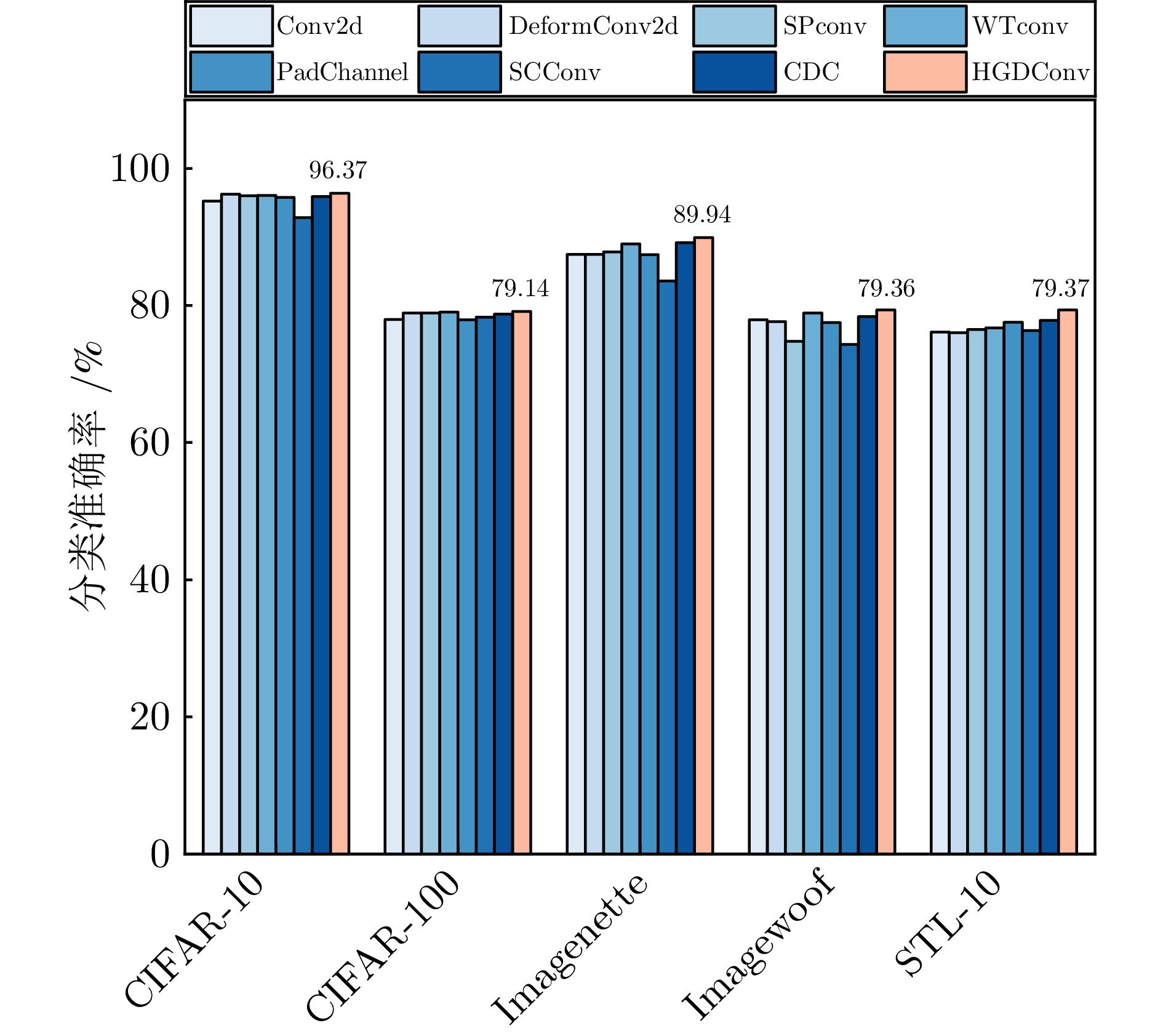
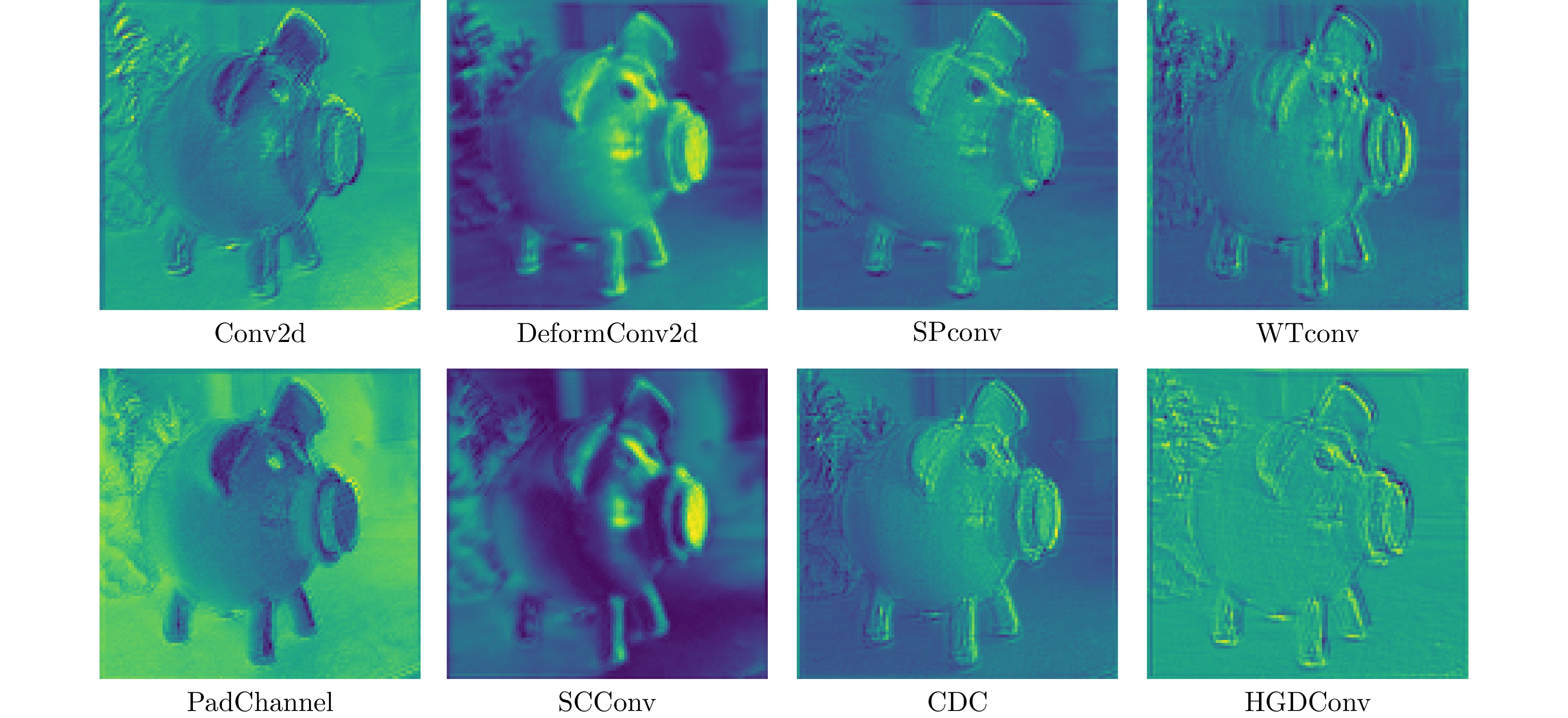
为解决传统图像分类方法边缘信息提取模糊、多尺度特征聚合不充分的问题, 提出全息梯度差分卷积的图像分类网络(HGDNet). HGDNet以ResNet-34为基础网络, 通过设计全息梯度差分卷积(HGDConv)与多尺度特征聚合细化模块(FARM)实现对图像特征的高效提取与精细聚合. HGDConv通过设计\begin{document}$0^{\circ}$\end{document} \begin{document}$45^{\circ}$\end{document} \begin{document}$90^{\circ}$\end{document} \begin{document}$135^{\circ}$\end{document}
为解决传统图像分类方法边缘信息提取模糊、多尺度特征聚合不充分的问题, 提出全息梯度差分卷积的图像分类网络(HGDNet). HGDNet以ResNet-34为基础网络, 通过设计全息梯度差分卷积(HGDConv)与多尺度特征聚合细化模块(FARM)实现对图像特征的高效提取与精细聚合. HGDConv通过设计