

-
摘要: 原油移动路径规划是原油调度中至关重要的子任务, 直接影响到生产过程中原油供给的稳定性和付油的高效性. 由于此任务需要考虑大规模罐区内复杂的设备条件, 并受到严格的工业生产约束, 同时需要兼顾途径阀门数量与泵机组运力, 导致目前依然倚重调度人员的人工经验来制定路径规划方案, 对传统算法和进化算法的应用提出了挑战. 据此, 本研究基于有向图结构对大规模原油罐区进行细致数学建模, 并提出一种基于偏好的原油移动路径多目标优化(Preference-based multi-objective optimization for crude oil movement path, PB-MOO)算法, 突破了过去高度依赖人工方法的局限性, 为原油移动路径规划提供智能化解决方案. 实验证明该算法能够在满足实际约束的条件下, 找到复杂任务的高质量候选解, 验证了其在此领域的可行性和有效性.Abstract: The planning of crude oil movement path is a crucial subtask within crude oil scheduling, directly impacting the stability of crude oil supply and the efficiency of oil delivery in the production process. Given the need to consider complex equipment conditions within large-scale tank areas and strict industrial production constraints, while also balancing the number of valves along the route with pump unit capacity, the current reliance on manual experience of schedulers for developing path planning schemes poses a challenge to the application of traditional algorithms and evolutionary algorithms. Therefore, this study undertakes a meticulous mathematical modeling of large-scale crude oil tank areas based on directed graph structures. It proposes a preference-based multi-objective optimization algorithm for crude oil movement path (PB-MOO), overcoming the limitations associated with past heavily manual methods and providing an intelligent solution for crude oil movement path planning. Experimental results demonstrate that the algorithm can identify high-quality candidate solutions for complex tasks while meeting practical constraints. This validates its feasibility and effectiveness in this field.
-
随着数字设备手机、平板和绘图板的迅速发展, 手绘草图正在成为直观表达用户想法的主要方式之一[1]. 因此, 草图识别在计算机视觉领域蓬勃发展, 其中包括基于草图的图像检索[2], 草图分析[3], 草图分割[4]和基于草图的图像合成[5-6]等.
草图识别的目的是物体类别识别, 该任务相比于图像识别更具有挑战性. 主要原因是图像一般表示为稠密像素[7-8], 但是草图缺乏丰富的颜色细节和视觉线索[9-11], 使得草图特征的表示更加困难. 为此, 近些年来国内外很多研究人员致力于草图识别方面的研究. 早期草图识别主要针对CAD图和艺术画[12]. 受到最新提出的大型数据集启发[13], Schneider等[14]提出了一系列基于手工特征的草图识别方法. 这些方法将草图看作自然图像并利用方向梯度直方图[15]和尺度不变特征变换[16]提取草图特征, 再利用支持向量机(Support vector machine, SVM)[17]分类器对草图类别进行预测[18]. 然而, 上述方法普遍存在的问题是浅层特征不能充分表达草图. 因此, Yu等[18]提出了Sketch-a-Net网络, 这是第1个使用深度学习的草图识别网络, 通过参数学习方式代替手工设计策略提高分类性能. 受到上述研究工作启发[19-31]设计了新的深度学习框架, 使得草图识别的性能首次超过了人类. 近期基于循环神经网络提取草图特征的工作[23−31], 除了考虑草图内在结构还加入了笔画的时序序列, 即考虑草图的笔画顺序来提取草图特征, 由此进一步提升了草图识别性能.
然而, 大多数深度卷积神经网络模型将草图视为自然图像来获得具有判别力的纹理特征, 而没有考虑草图本身所具有的形状信息. 具体来说, 草图在二维空间中以曲线的形式进行信息传递[24], 因此草图具备很好地描述物体几何形状的特性. 但由于不同人绘画技巧和绘制风格的差异, 对同一物体进行描述的草图形状会千差万别, 而传统的特征描述子并不能很好的描述类间和类内的形状差异性. 本文工作的目标是寻找一种更有效的方法来将草图形状信息融合到端到端的神经网络中, 从而使得深度学习网络具有更好的草图识别效果. 为此, 本文提出了一种新颖的基于双分支互学习的深度学习网络, 即双模型融合网络(Dual-model fusion network, DMF-Net), 以此实现草图纹理信息和形状信息的结合来进行草图识别. 在训练阶段, 第1个网络分支输入原始草图, 并使用传统的卷积神经网络提取纹理信息; 第2个分支输入草图的采样点集合, 并使用基于图卷积神经网络提取形状信息; 2个网络使用互引导机制实现联合训练. 测试阶段将训练好的网络分别提取不同特征并将其融合, 然后输入分类器实现最终草图的类别预测.
在提出的双分支融合网络中, 基于损失函数互引导机制实现的相互学习主要由2部分组成: 1)网络的每个分支使用传统的监督分类损失和基于另一个分支分类概率作为后验的模仿损失. 为此使用2个概率分布的Kullback-Leibler (KL)距离作为类别一致性损失; 2)网络基于视觉显著图的一致性计算损失. 显然, 当草图使用两种不同的形式进行表示时, 视觉显著图的区域应该相同或相近, 因此网络将视觉一致性定义为原始草图的显著图和基于点表示草图的显著图之间的欧氏距离. 最后, 将分类损失、类别一致性损失和视觉注意一致性损失结合完成网络参数的训练.
本文主要贡献有: 1)针对草图识别问题, 首次提出用新的双模型融合网络来提取草图的纹理信息和形状信息; 2)针对双分支网络的互学习问题, 提出了利用视觉注意一致性损失、分类损失和类别一致性损失联合训练的策略; 3)在Sketchy数据集和TU-Berlin数据集上进行了实验验证. 实验结果表明, 本文提出的模型在草图分类任务上取得了最好的效果.
本文结构安排如下: 第1节详细阐述了基于双分支网络的草图识别算法; 第2节阐述了网络的训练和测试细节; 第3节通过与已有算法在公开数据集上进行定性和定量比较, 实现了对本文提出方法有效性的验证; 第4节总结本文所研究的工作并提出下一步的研究方向.
1. 双分支识别网络
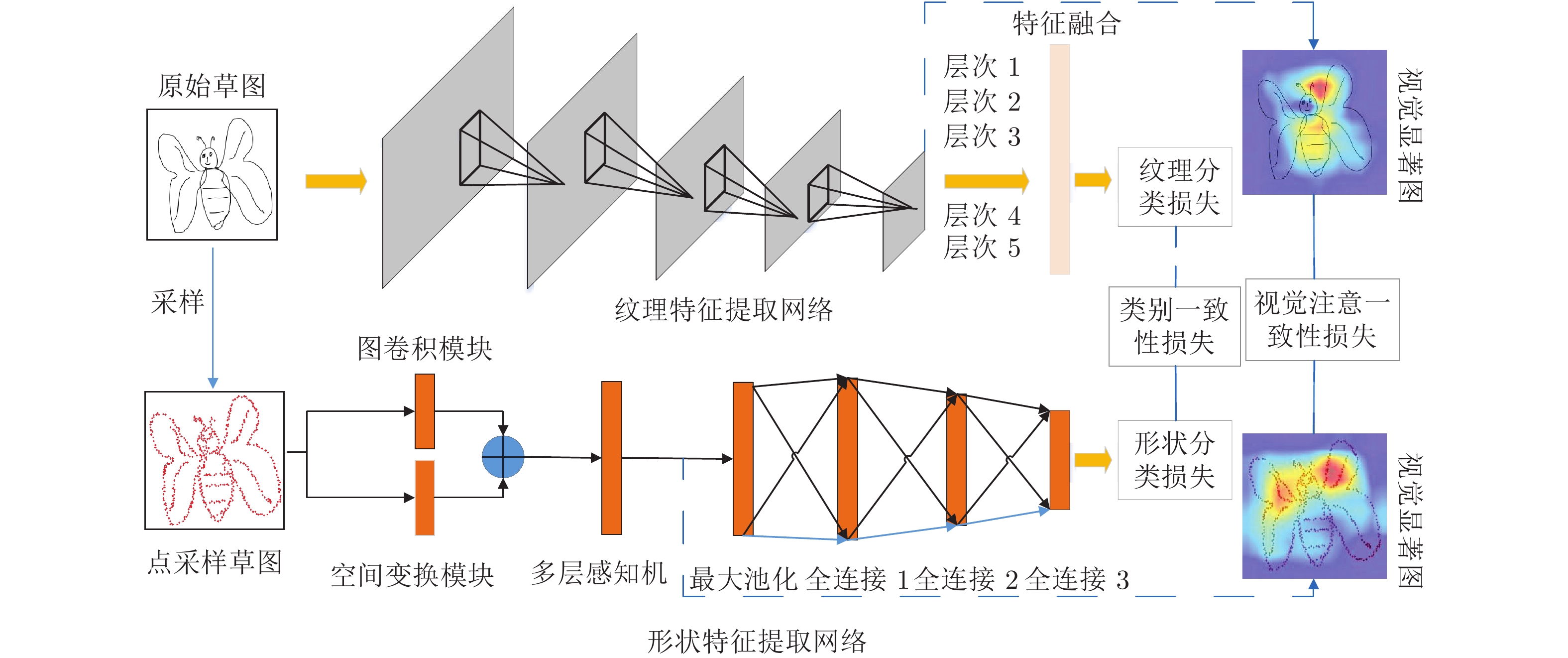
双分支识别网络的框架如图1所示, 由2部分组成: 第1部分主要完成基于多层次特征融合网络提取草图的纹理特征, 第2部分主要完成基于点采样的图卷积网络提取草图的形状特征, 最后利用分类损失、类别一致性损失和视觉注意一致性损失实现网络参数的优化. 第1.1节介绍基于原始草图的神经网络提取纹理特征的过程, 第1.2节介绍基于点表示草图的神经网络提取形状特征的过程, 第1.3节介绍网络训练使用的损失函数.
1.1 纹理特征提取网络
纹理特征提取网络用于提取草图的纹理信息. 近年来, 基于卷积神经网络提取的信息已被证明能够提供判别性纹理特征以用于草图识别[20-18]. 因此, 本文基于ImageNet数据集训练的ResNet50模型[25], 提出了纹理特征提取网络Texture-Net. 为了丰富草图的特征表示, 同时不引入更多的学习参数, 模型利用多层特征融合策略来提取更加丰富的语义信息. 如图2所示, ResNet50网络由4个块组成, 每个块的最后1个卷积层使用池化操作来保留显著特征并降低特征维度, 然后与网络的第一个全连接层进行特征融合以实现草图纹理特征表示, 即层次1到层次5的特征融合. 对于第k个卷积层所生成的特征图表示为
${F_k} \in {{{{\bf{R}}}}^{{H_k}\; \times\; {W_k} \;\times\; {C_k}}}$ , 多层特征图融合用式(1)表示为: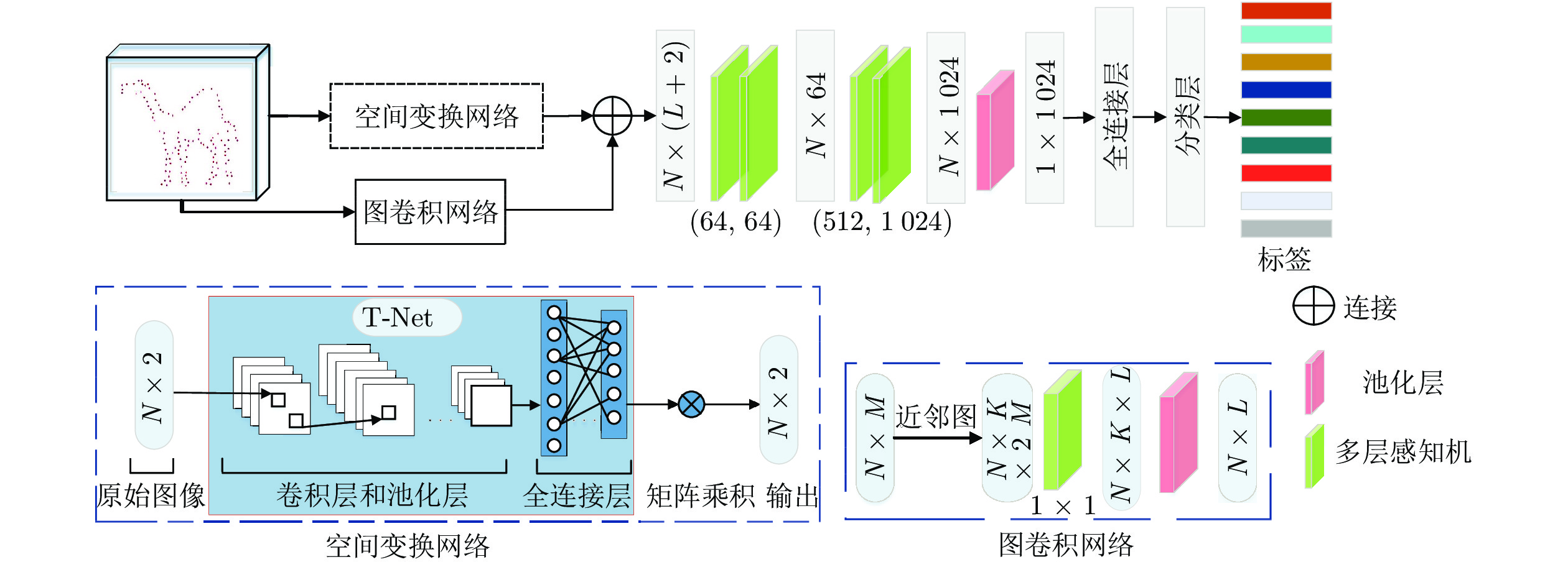 图 2 本文形状特征提取网络的原理框架示意图Fig. 2 Schematic diagram of Shape-net framework proposed in this paper
图 2 本文形状特征提取网络的原理框架示意图Fig. 2 Schematic diagram of Shape-net framework proposed in this paper$${F_{fusion}}({f_i}) = [GAP({F_1}),GAP({F_2}),\cdots,{F_{fc}}]$$ (1) 式中,
${F_{fc}} $ 表示第1个全连接层的特征,$ {{GAP}}( \cdot ) $ 表示在不同特征图上做全局平均池化(Global average pooling, GAP), 即${{GAP(}}{F_k}{\rm{)}}\in {{\bf{R}}^{{C_k}}}$ . 将${{{\rm{GAP}}}}$ 后的卷积层特征与${F_{fc}}$ 特征连接得到最后的草图特征表示. 因此, 最终生成的草图纹理特征包含了从高层语义信息到低层细节信息的多层联合表示. 同时, 网络并没有引入额外的学习参数, 这样保证了融合过程的简单性和高效性.1.2 形状特征提取网络
与传统神经网络模型对规则网格提取特征的Texture-Net不同, 本文提出了基于点集的形状特征提取网络(Shape-Net)以对代表性的点集提取结构特征. 两种网络提取特征过程有本质性区别: 对于Texture-Net, 输入和输出特征图分别表示为
${F_1} \in {{R}}_1^{H \;\times\; W \times c}$ 和${F_2} \in {{R}}_2^{H' \;\times\; W' \times c'}.$ 其中W、H和$ W'$ 、$H'$ 分别表示${F_1}$ 和${F_2}$ 的宽度和高度.$c$ 表示上一层的通道数,$c'$ 表示当前层的通道数. 卷积滤波器表示为一个张量, 即$F \in { {{R}}^{{s_1} \;\times\; {s_2} \;\times\; c \;\times\; c'}}$ , 其中${s_1}$ 和${s_2}$ 分别表示滤波器的宽度和高度. 与${F_1}$ 相比,${F_2}$ 有更低分辨率(${{{R}}_1} < {{{R}}_2}$ )和更多通道$({{c'}} > c),$ 因此更能表示高层语义信息. 上述步骤递归执行最终生成分辨率低但通道数多的特征图. 对于Shape-Net, 输入是一系列的点并且每个点表示一个特征, 即$F =\{ ({{{p}}_1},$ ${{{f}}_1}{\rm{),(}}{{{p}}_2},{{{f}}_2}{\rm{)}},\cdots,{\rm{(}}{{{p}}_n},{{{f}}_n}{\rm{)\} }}.$ 网络在输入特征图${F_1}$ 上使用点卷积获得高层语义表示${F_2}$ , 其中${F_2}$ 比${F_1}$ 有更低的空间分辨率(即更少的点)和更多的通道数. 此外,${F_1}$ 到${F_2}$ 的过程能够将特征聚集成更少点但是每个点包含了更丰富的特征.以离散点作为网络输入的方法最初用于点云处理[34-27], 主要原因是基于点卷积的神经网络可以大大降低模型的时间复杂度和空间复杂度. Hua等[26]构建了针对场景语义分割和目标识别的两个逐点卷积神经网络, 并设计了一种可以输出点云中每一点特征的逐点卷积算子. Wang等[27]提出了一个端到端的渐进式学习方法, 即通过训练一个基于图像块的多阶段网络, 在不同的细节级别学习点云信息. 基于上述点云中点卷积的思想, 本文通过将草图看成一系列的二维点, 充分考虑草图的空间结构, 最终实现高效、具有鲁棒性的草图特征表示.
通常情况下, 基于点的草图表示具有采样点的起始点位置及草图旋转和平移不变性, 本文采用基于点采样的神经网络作为骨干网络, 该网络模型引入了最大池化和空间变换网络来解决上述两个问题. 但是上述网络设计仍存在不足之处, 即不能获得二维点中局部结构信息, 而邻域信息对特征表达非常重要.
以往的点特征提取方法往往仅利用每个点的特征表示, 而忽略了相邻点的关系, 为了解决上述问题, 人们提出了基于图卷积的神经网络并应用于点云任务中[29-44]. Wang等[29]提出使用拉普拉斯算子和池化层次结构动态构件图, 并使用局部谱卷积提取每个点邻域中的结构信息. Simonovsky等[30]提出了可以作用在任何图结构上且权重由节点间边权决定的图卷积模型. Kipf等[44]提出了一种基于图卷积神经网络的可扩展模型图卷积神经网络(Graph convolutional network, GCN). 该模型要求网络在训练过程中计算整个图的拉普拉斯矩阵, 然后利用局部谱卷积提取特征, 实验在半监督任务上取得了很好的效果. 基于图卷积思想, 本文提出了基于图卷积的点草图形状特征提取网络. 与GCN在谱图上进行卷积操作不同, 此网络在空间域上对图进行卷积操作, 不仅提取当前点的特征, 同时结合了当前点周围的K个近邻点特征来表征草图, 即首先以每个点为中心并利用K近邻(K-nearest neighbor, KNN)算法构建图模型, 然后将中心点特征加入到图中的K条边特征中, 再利用卷积操作将K个特征整合成一个特征作为中心点最终的特征表示.
下文给出Shape-Net的基本结构如下: 第1.2.1节通过描述特征提取网络提取草图的形状表示流程, 第1.2.2节介绍为了解决草图空间不变性而提出的空间变换网络, 第1.2.3节介绍采样点构建邻域图并利用图卷积提取局部结构信息的过程.
1.2.1 特征提取过程
对于Shape-Net网络, 首先预处理草图并使用最远采样策略[31] 获取1024个采样点. 然后, 利用点卷积学习每个点的特征描述子, 这是提取点特征的关键步骤. 如图2所示, Shape-Net实现过程如下: 第1步, 将N个M 维采样点输入到二维空间变换网络, 其中N表示采样点数, M表示坐标维度, 由于二维空间坐标为(x, y) , 因此M取值为2; 第2步, 利用空间变换网络中的T-Net模块学习
$2 \times 2$ 仿射矩阵(第1.2.2节), 使得网络输入在正则空间中对齐, 同时网络引入图卷积(第1.2.3节)来从M维采样点中学习邻域信息的表示; 最终将图卷积生成的特征图和空间变换生成的特征图拼接生成N × (L + 2)维特征图; 第3步, 将拼接得到的特征送入多层感知机中, 最终经过多层感知机、最大池化和全连接得到点采样草图的特征表示.1.2.2 空间变换网络
形状特征提取网络在提取基于点表示草图的信息时, 通过对输入的二维坐标点进行一系列的点坐标变换, 又称为正则变换[36], 来实现形状特征的表达. 而网络对目标的点变换应该具有空间不变性, 即草图旋转和平移不变性. 为此, 网络在进行特征提取之前, 先对点表示的草图进行对齐, 即正则空间对齐, 以保证目标物体对空间变换的不变性. 实际上, 类似于点云模型中使用仿射变换解决几何变形问题[ 34], 对于基于点坐标的空间变换已经被证明在二维点集匹配[33-35]和点特征表征[28]任务中依然重要.
实现对齐操作首先要训练空间变换网络中的T-Net模块完成2 × 2仿射矩阵的生成, 然后将训练得到的矩阵与输入的N个2维采样点进行矩阵相乘来实现最终的对齐目的. 如图2所示, T-Net结构与Shape-Net结构类似, 对网络输入的N个二维采样点, 分别使用多层感知机、最大池化和全连接层学习特征, 其中全连接层的维度分别设置为1024、512和250, 最后通过矩阵变换得到2 × 2的仿射矩阵.
1.2.3 图卷积网络
邻域点往往具有类似的几何结构[37], 因此通过对每个点构建局部邻域图并对图中的边使用卷积操作, 实现草图局部点集特征的提取. 基本流程如下: 首先, 基于目标点和其K个邻近点构建局部图. 然后, 对图中的边利用1 × 1卷积来提取K维邻域特征. 将学习到的特征在向前传递过程中, 使用池化层压缩特征以保留重要细节和去掉不相关的信息, 实现局部特征的表达.
具体地, n个F维的点表示为
${\boldsymbol P}=\{{ p}_1,{ p}_2,\cdots,$ ${ p}_{ n}\}$ . 其中, F = 2, 每个点表示为2维坐标. 对于草图中的每个点, 计算无向图$\xi = \left( {\nu {\rm{,}}\varepsilon } \right),$ 其中$\nu =\{ {\nu _1},$ ${\nu _2},\cdots,{\nu _k}\}$ 和$\varepsilon = \{ {\varepsilon _1},{\varepsilon _2},\cdots,{\varepsilon _k}\}$ 分别代表顶点和图中的边. 在最简单的情况下, 利用每个点的K近邻在二维空间构建无向图$\xi $ . 提取图中的边特征并表示为${{{e}}_{{{ij}}}} = {{{h}}_\theta }({{{x}}_{m{i}}},{{{x}}_{{j}}})$ , 其中${{{h}}_\theta }:{{\bf{R}}^{{F}}} \times {{\bf{R}}^{{F}}} \to {{\bf{R}}^{{{F'}}}}$ 表示一系列可学习参数$\theta $ 的非线性函数. 最后, 图卷积网络使用池化将学习到的特征进行聚集从而实现每个点局部信息的表达.1.3 目标函数
网络利用互学习策略进行草图识别模型的训练, 从而进一步提高性能. 本文方法同时训练两个分支, 从而实现网络之间的知识迁移. 网络的目标函数包括分类损失、类别一致性损失和视觉注意一致性损失3部分.
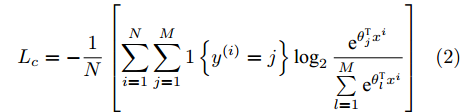
1)分类损失. 网络的两个分支采用softmax交叉熵损失函数, 定义如式(2)所示:
$${L_c} = - \frac{1}{N}\left[ {\sum\limits_{i = 1}^N {\sum\limits_{j = 1}^M {1\left\{ {{y^{(i)}} = j} \right\}\log_2 \frac{{{{\rm{e}}^{\theta _j^{\rm{T}}{x^i}}}}}{{\sum\limits_{l = 1}^M {{{\rm{e}}^{\theta _l^{\rm{T}}{x^i}}}} }}} } } \right]$$ (2) 式中,
${{{x}}^i}$ 表示输入的草图,${{{y}}^i}$ 表示${{{x}}^i}$ 对应的标签.$N$ 表示草图的数量.$M$ 表示当前草图类别的数量.$\theta $ 表示全连接层的权重, 用来将隐藏层的特征映射为标签.2)类别一致性损失. 对于样本
${x_i} \in \{ {x_1},{x_2},\cdots, {x_N}\},$ Texture-Net利用式(3)计算${x_i}$ 属于类$M$ 的概率:$$p_1^m({x_i}) = \frac{{{{\rm{e}}^{{z_i}}}}}{{\sum\limits_{l = 1}^k {{{\rm{e}}^{{z_i}}}} }}$$ (3) 式中,
${z_i}$ 表示隐藏层的输出. Shape-Net另外一个分支网络使用类似定义并表示为$p_2^m$ . 为了定量匹配2个网络的预测${p_1}$ 和${p_2}$ , 网络使用KL散度计算2个分布的距离. 从${p_1}$ 到${p_2}$ 的KL距离定义如下:$${{\rm{D}}_{KL}}({p_2}{\rm{||}}{p_1}) = \sum\limits_{i = 1}^N {\sum\limits_{m = 1}^M {p_2^m({x_i})\log_2 \frac{{p_2^m({x_i})}}{{p_1^m({x_i})}}} } $$ (4) 3)视觉注意一致性损失. 通常来讲, 两个分支视觉显著图的一致性能够提高图像分类的性能. 同时, 如果视觉显著图能够反映与类别标签相关的区域, 网络则能够学习到更有判别力的特征. 对于每个原始草图和点采样草图, 网络使用类激活图(Class activation mapping, CAM)[32]提取视觉显著图. 具体来讲, 网络在前向激活图上使用加权结合, 然后使用ReLU激活函数获得视觉显著图为:
$${{H}}_{ij}^m = ReLU\left( {\sum\limits_k {\left( {\left( {\frac{1}{Z}\sum\limits_i {\sum\limits_j {\frac{{\partial {y^c}}}{{\partial A_{ij}^k}}} } } \right){A^k}} \right)} } \right)$$ (5) 式中, Z表示特征图像素数量,
${{{A}}^k}$ 表示卷积层第k个特征图.为了增强显著图的一致性, 网络使用均方误差计算原始草图显著图
${H^{{s}}}$ 和基于点采样草图视觉图${H^{{p}}}$ 之间的损失为:$${L_a} = \frac{1}{{NMHW}}\sum\limits_{n = 1}^N {\sum\limits_{m = 1}^M {{{[H_{nm}^{{s}} - H_{nm}^{{p}}]}_{\;2}}} } $$ (6) 式中,
${{{H}}_{nm}}$ 表示第n张图像属于第m类的视觉显著图.最终, 将式(2)、式(4)和式(6)分别结合实现网络Texture-Net和Shape-Net的训练, 如下所示:
$$L_{total}^T = L_{{c}}^T + {D_{KL}}({p_2}\left\| {{p_1}} \right.) + {\lambda _1}{L_{{a}}}$$ (7) $$L_{total}^{{S}} = L_{{c}}^S + {D_{KL}}({p_1}\left\| {{p_2}} \right.) + {\lambda _2}{L_{{a}}}$$ (8) 2. 网络的训练和测试
实验使用Pytorch深度学习开源工具训练网络模型, 所有实验在两块英伟达TitanXp显卡上运行.
2.1 训练阶段
本节基于文献[38]的训练策略, 在ImageNet数据集上训练Texture-Net. 同时使用随机梯度下降法进行梯度更新, 每批图像数量为64. 学习率为0.1, 错误率稳定时学习率减为原来的0.1倍. 衰减率和动量分别为0.0001和0.9. 对于Shape-Net, 使用Adam优化器训练网络, 学习率和每批图像数量分别设置为0.001和64, 每训练40轮学习率为原来的0.5倍. 衰减率和动量参数设置同Texture-Net. 式(7)和式(8)中的超参数设置为1.
2.2 测试阶段
测试过程中, 首先保持图像纵横比并设置草图的最大尺寸为256像素. 然后, 填充边缘像素使得图像大小最终为256 × 256. 在预测草图类别时, 将两个分支的全连接层特征进行连接, 然后输入到softmax分类器中, 得到最终的类别预测.
3. 实验结果与分析
为了验证第3.3节DMF-Net模型在草图分类的有效性, 在2个公开数据集TU-Berlin数据集和Sketchy数据集上进行了实验. 第3.1 ~ 3.2节对数据集和评价标准做详细描述, 第3.4节通过消融实验分析模型不同模块的性能, 第3.5节分析点集采样策略和点数对分类性能的影响.
3.1 数据集介绍
1) TU-Berlin数据集[13]是提出的第一个广泛应用于草图识别的手绘草图数据集, 其中包含250个草图类别, 例如飞机、日历和长颈鹿. 人类在该数据集所有类别的平均识别率为73.1%. 由于数据集训练数量的有限性, 采用数据增广方法[18, 32]进行数据扩展, 包括水平映射和笔画移除.
2) Sketchy数据集[39]是第一个用于细粒度草图检索的大型草图数据集, 包含75471张手绘草图并分成了125个类别. 此数据集广泛应用于细粒度草图检索并为图像合成和风格转换提供了可能性.
3.2 评价标准
本文使用和文献[40-51]一样的训练策略, 在草图分类任务上定量评估模型性能. 具体来说, 在每个类别上使用平均预测评估分类性能. 然后, 在所有类别上使用平均预测率和其他方法比较分类准确率. 同时引入受试者工作特征曲线(Receiver operator characteristic curve, ROC)[43] 和曲线下面积(Area under curve, AUC)[50]对分类效果进行更好的评价.
3.3 草图分类实验结果
本节展示了TU-Berlin数据集在草图分类任务上的性能. 类似于文献[13], 每个类别在训练集上图像数量的设置分别为8、40、64和72. 数据集中的训练图像是随机选择的, 剩余图像作为测试集. 基准方法分为两类: 传统手工特征和深度特征. 对于手工特征, 选择文献[14]中提出的4种带有空间金字塔的FisherVector (FV)特征表示. 同时采用文献[13]提出的映射特征进行草图表示. 对于后者, 对比方法包括SketchPoint[42]、Alexnet[38]、Network in network (NIN)[45]、视觉几何组网络 (Visual geometry group network, VGGNet)[46]、 GoogLeNet[47]、SketchNet[41]、Sketch-a-Net[18]、 Cousion Network[49]、Hybrid CNN[48]、Landmark-aware Network (LN)[51]和SSDA方法.
对比结果如表1所示. 由表1可以看出, DMF-Net在所有设置都优于其他方法, 并且相对于最优方法有明显提升(86%相对84%、85%相对82%、77%相对76% 和60%相对59%). 优越性主要得益于纹理特征和形状特征的结合同时引入了2个分支的互学习策略进行模型的优化.
表 1 不同算法下在TU-Berlin数据集上分类准确率的比较 (%)Table 1 Comparison of sketch classification accuracy with different algorithms on the TU-Berlin dataset (%)方法 图像数量 8 40 64 72 Eitz (KNN hard) 22 33 36 38 Eitz (KNN soft) 26 39 43 44 Eitz (SVM hard) 32 48 53 53 Eitz (SVM soft) 33 50 55 55 FV size 16 39 56 61 62 FV size 16 (SP) 44 60 65 66 FV size 24 41 60 64 65 FV size 24 (SP) 43 62 67 68 SketchPoint 50 68 71 74 AlexNet 55 70 74 75 NIN 51 70 75 75 VGGNet 54 67 75 76 GoogLeNet 52 69 76 77 Sketch-a-Net 58 73 77 78 SketchNet 58 74 77 80 Cousin Network 59 75 78 80 Hybrid CNN 57 75 80 81 LN 58 76 82 82 SSDA 59 76 82 84 DMF-Net 60 77 85 86 图3展示了TU-Berlin数据集的6个类别, 每个类别随机选取72张图片进行受试者工作特征曲线的绘制和曲线下面积值的计算. 从图中可以看出, 6个类别的受试者工作特征曲线均靠近坐标的左上角, 且曲线下面积值均高于随机试验的曲线下面积的值(0.5), 结果表明了基于互学习的双分支网络在草图分类问题上有着很好的效果.
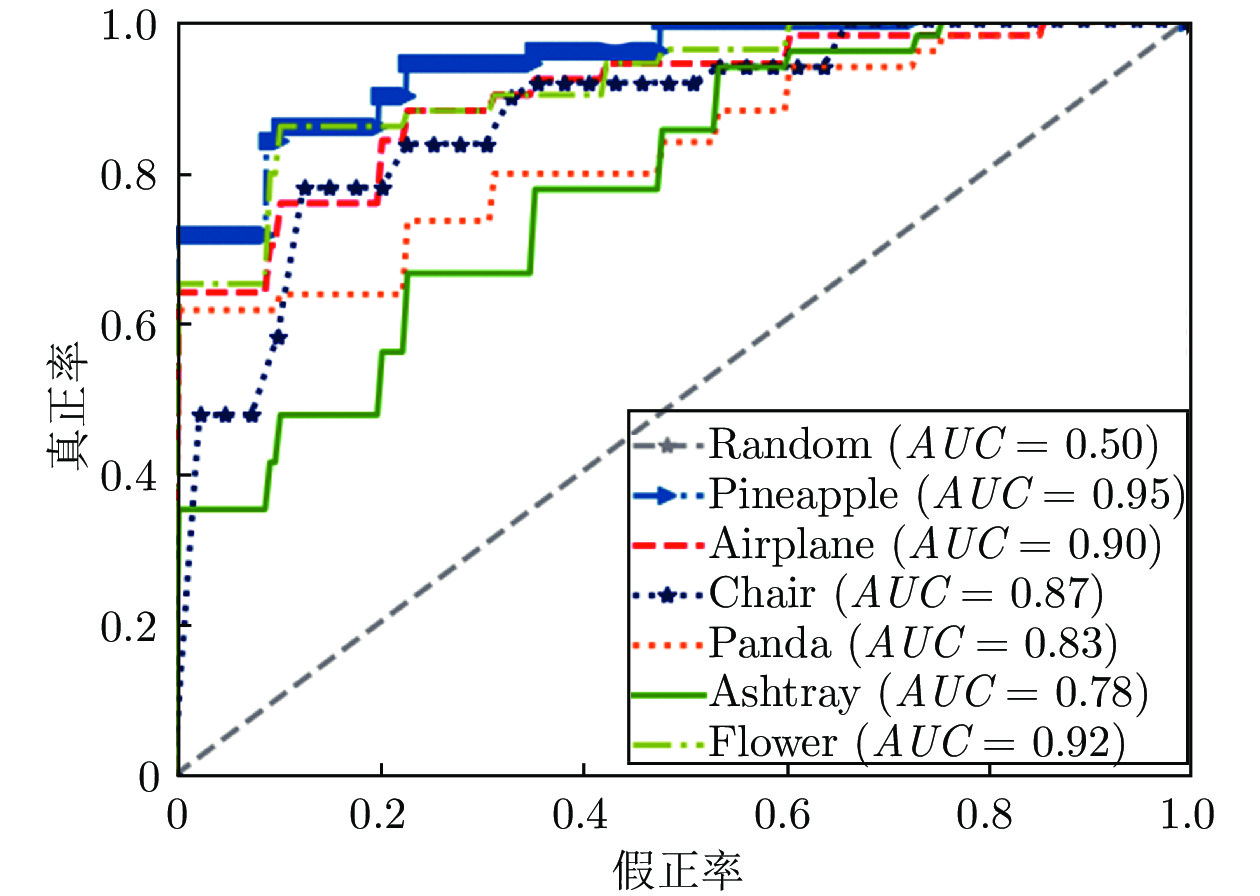 图 3 TU-Berlin数据集上6个类别的受试者工作特征曲线及曲线下面积值Fig. 3 ROCs and AUC values of 6 classes in the TU-Berlin dataset
图 3 TU-Berlin数据集上6个类别的受试者工作特征曲线及曲线下面积值Fig. 3 ROCs and AUC values of 6 classes in the TU-Berlin dataset3.4 消融实验
为了验证本文算法不同模块对分类性能的影响, 模型在2个数据集上进行实验测试. 实验包括图卷积、不同的损失函数、2个分支结构和多层特征融合的影响.
1)图卷积和不同损失函数的影响. 首先利用实验验证图卷积(Graph convolution, GC)对局部几何信息具有更强的表示. 然后验证注意力一致性(Attention consistency, AC)和类别一致性(Category consistency, CC)嵌入模型训练前后对分类准确率的影响. 基础网络(Base network, BN)表示在TU-Berlin数据集和Sketchy数据集上不采用GC、AC和CC三种策略训练的Texture-Net和Shape-Net.
分类的实验结果如表2所示. 通过实验可以得出如下结论: 1)当结合目标点特征和其临近点特征时, 能够增强局部结构特征的表达并因此解决了不同类别但是结构相似的草图由于局部差异而被错分的问题; 2)两种草图表示的注意力一致性能够提升性能, 即在TU-Berlin数据集上原始模型为82.71%, 原始模型和注意力一致性结合的准确率为84.12%. 主要原因是由于视觉注意区域的感知一致性能够帮助两个分支得到更准确的判别区域; 3) 原始模型和类别一致性策略的结合使得模型训练过程中一个分支能够利用其他分支的信息并提升各自的性能; 4)本文使用原始模型和多个策略的联合, 使得模型能够得到更好的参数优化和特征表达.
表 2 在TU-Berlin数据集和Sketchy数据集上实现草图分类的网络结构分析 (%)Table 2 Architecture design analysis for sketch classification on TU-Berlin and Sketchy (%)方法 TU-Berlin Sketchy BN 82.71 85.75 BN + GC 83.93 86.49 BN + AC 84.12 87.07 BN + CC 84.75 87.36 BN + GC + CC 85.47 87.64 BN + AC + CC 85.51 87.71 BN + GC + AC + CC 86.12 88.01 2) 两个分支性能评价. 对于构造复杂和类间相似度高的草图, 传统的神经网络提取的视觉特征往往不能很好的描述草图差异. 因此, 学习基于采样点的结构化特征对草图形状表示具有重要的意义. 为评估两个单独分支和整个网络结构的性能, 在TU-Berlin数据集和Sketchy数据集上对草图分类准确率进行了实验验证, 所得结果如表3所示. 基础网络表示融合Shape-Net和Texture-Net特征, 而不使用图卷积和互学习损失函数对模型进行优化. 通过对比可以发现, 使用两个分支进行草图的特征表达能够提高分类准确率. 主要原因是纹理特征提取网络对于相似构造的草图差异性具有很差的表达能力. 相反, 形状特征提取网络能获得很好的结构信息, 对草图形状有更好的表达.
表 3 利用双分支神经网络的草图分类准确率 (%)Table 3 Classification accuracy results using two-branch neural networks (%)方法 TU-Berlin Sketchy 纹理网络 81.05 83.18 形状网络 70.87 70.43 基础网络 82.71 85.75 为了进一步验证每个模块对草图分类的重要性, 从TU-Berlin数据集中随机挑选了13个类别进行定量实验分析. 如图4所示, 相比于只使用纹理特征表示草图, 加入形状特征后的草图分类准确率平均提升了1.5%, 加入形状特征和互学习策略的分类准确率平均提升了4%. 另外可以发现, 对于一些对于识别困难的样本, 如Panda、Flying bird和Wheel, 无论单独加入形状特征还是融合互学习策略, 分类准确率都有大幅度提升. 因此可以得出以下结论: a)单纯的纹理表征对难例草图具有很低的判别能力; b)通过对草图进行点采样, 可以挖掘更多的形状信息以及潜在的草图模式, 从而证明了点表示草图对形状信息具有强表达性; c)互学习策略可以使得2个模型相互学习和共同进步, 从而促进两个网络共同学习到更加具有鲁棒性的特征表示, 使得分类性能得到大幅提升.
 图 4 TU-Berlin数据集上13个类别的分类准确率Fig. 4 Classification accuracy of 13 classes in the TU-Berlin dataset
图 4 TU-Berlin数据集上13个类别的分类准确率Fig. 4 Classification accuracy of 13 classes in the TU-Berlin dataset3)多层特征融合评价. 尽管多数神经网络方法只利用全连接层特征表示草图, 但是其他网络层提取的草图特征也能够表达草图并提升分类性能. 因此, 为了融合更多的草图信息, 本文将底层特征和高层特征结合以生成更加丰富的语义信息. 如表4所示, {1, 2, 3, 4} 表示图2中ResNet50第1个全连接层融合层次1、层次2、层次3和层次4四个模块中最后一个卷积层经过池化生成的特征表示. 通过对比可以发现, 2个数据集准确率有相同的趋势: 融合4个隐藏层的特征时, 分类准确率最高. 同时, 分类性能逐渐趋于饱和, 并且第1层和第2层中的卷积层特征对最终草图分类准确率影响很小.
表 4 不同层的分类准确率结果 (%)Table 4 Classification accuracy results using given feature levels (%)方法 TU-Berlin Sketchy {4} 85.83 87.23 {3, 4} 86.01 87.87 {2, 3, 4} 86.06 87.93 {1, 2, 3, 4} 86.12 88.01 3.5 点采样策略和点数对草图分类的影响
采样常用的策略主要包括均匀采样和随机采样两种. 两种采样结果如图5所示, 本文实验采用了均匀采样策略. 通常情况下, 随机采样容易生成抖动噪声, 因此Shape-Net模型引入了池化操作和空间变换网络来消除噪声影响. 两种采样对比实验结果如表5所示. 由表5可以看出, 均匀采样和随机采样在TU-Berlin数据集的草图分类准确率分别为86.12%和86.09%. 综上所述, 随机采样性能基本与均匀采样持平, 同时模型对随机采样具有鲁棒性.
 图 5 两种策略在草图点采样的结果示意图Fig. 5 The point sampling demonstration of two strategies on the sketch表 5 2种采样策略在TU-Berlin数据集的分类准确率 (%)Table 5 Classification accuracy on TU-Berlin dataset using two sampling strategies (%)
图 5 两种策略在草图点采样的结果示意图Fig. 5 The point sampling demonstration of two strategies on the sketch表 5 2种采样策略在TU-Berlin数据集的分类准确率 (%)Table 5 Classification accuracy on TU-Berlin dataset using two sampling strategies (%)方法 分类准确率 均匀采样 86.12 随机采样 86.09 为了验证本文提出的草图识别模型在不同采样点数目下的影响, 在TU-Berlin数据集和Sketchy数据集上进行了对比实验分析. 从表6可以得出以下结论: 1)随着点数的不断增加, 草图分类准确率在不断的上升. 当采样点数到1000时, 准确率趋于稳定. 同时, 如果采样点过少, 草图分类准确率会大大降低. 因此, 本文设置采样点数为1024, 这样在保证计算效率的同时, 准确率也可以达到预期目标; 2)当采样点数继续增加时, 准确率反而会下降. 其主要原因在于, 太多的点数使得点表示的草图集中于表达重复的模式而不是具有判别力的形状, 对于某些难例样本的分类会更加困难.
表 6 不同采样点数对分类准确率的影响 (%)Table 6 Effects of the point number for the classification accuracy (%)数据集点数 TU-Berlin Sketchy 32 81.87 83.37 64 82.75 84.35 128 83.23 84.83 256 84.34 85.90 512 85.42 87.36 600 85.75 87.5 750 86.00 88.00 1024 86.12 88.01 1200 86.13 88.04 1300 86.08 88.01 4. 结束语
本文提出了一种基于双分支神经网络结构, 实现手绘草图识别的任务. 网络引入了视觉显著图来学习具有判别力的草图区域, 同时使用注意力一致性和类别一致性的互学习策略实现模型的优化. 在常用两个数据集的实验结果证明了该模型提取的特征优于传统手工特征, 相比于其他几种算法在草图分类任务上拥有更好的表现, 并且对草图的点采样策略具有鲁棒性. 未来将考虑融合笔画顺序到网络中并使用互学习策略, 实现草图性能的进一步优化.
-

图 2 简化的原储罐区管道运输流程图模型
Fig. 2 Simplified pipeline transportation flowchart model for crude oil tank areas

图 4 从罐T05和罐T13出发的2个子任务各自偏好泵机权重
Fig. 4 Preference pump weights of two subtasksstarting from tank T05 and T13
表 1 参数说明
Table 1 Parameter descriptions
符号 描述 $BH_b$ 第$b $个调合头 $d_{k_1,\;k_2}$ 节点$v_{k_1}$与节点$v_{k_2}$ 之间的路径长度 $IL_l$ 第$l $条进泵线 K 节点总数 L 进泵线个数 J 罐底阀个数 N 原油类型总数 NB 调合头节点个数 $ND_{k,\;r}$ 第$k $个个体中第$r $条路径包含的节点个数 NP 泵节点个数 NT 罐节点个数 $Q_{n,\;r}$ 原油移动路径$R_{n,\;r}$中泵能提供的最大流量 $H_{n,\;r}$ 原油移动路径$R_{n,\;r}$中泵的额定扬程 $\eta_{n,\;r}$ 原油移动路径$R_{n,\;r}$中泵的运行效率 $P_{n,\;r}$ 原油移动路径$R_{n,\;r}$中泵的功率 $PP_o$ 第$o $个泵 $Q_{n,\;r}^{dmand}$ 原油移动路径$R_{n,\;r}$中的需求流量 $Q_{n,\;r}^{pump}$ 原油移动路径$R_{n,\;r}$中泵的流量 R 路径$R_{n,\;r}$的节点个数 $TK_t$ 第$t $个罐 $VL_j^{TK_t}$ 罐$TK_t$的第$j $个罐底阀 $p_k$ 表示$v_k$是否为泵节点 $x^k_{n,\;r,\;i}$ 第$k $个个体中第$n $个子任务的第$r $个节点为$v_i$ $y_{k,\;IL_l,\;PP_o}$ $v_k$为进泵线$IL_l$与泵$PP_o$之间的阀门 $y_{k,\;PP_o,\;BH_b}$ $v_k$为泵$PP_o$与调合头$BH_b$之间的阀门 $y_{j,\;IN\_TK_t}^k$ $v_k$为连接罐$TK_t$的罐底阀$VL_j^{TK_t}$的进罐阀门 $y_{j,\;OUT\_TK_t,\;IL_l}^k$ $v_k$为罐底阀$VL_j^{TK_t}$与进泵线$IL_l$之间的阀门 $z_{k,\;IL_l}$ $v_k$是否处于进泵线$IL_l$中  下载: 导出CSV
下载: 导出CSV
表 2 部分储罐节点信息
Table 2 Information of partial storage tank nodes
罐节点 罐底阀节点 罐容量下限 (t) 罐容量上限 (t) T01 E-T01-1 4 000 16 000 E-T01-2 T02 E-T02-1 4 000 35 000 E-T02-2 T03 E-T03 12 000 45 000 T04 E-T04 10 000 16 000 T05 E-T05-1-1 12 000 45 000 E-T05-1-2 E-T05-2-1 E-T05-2-2
下载: 导出CSV
表 4 部分管道节点信息
Table 4 Information of partial pipline nodes
管道名 连接节点 双向边 阀门 8-E-104/T06 T06, N6 否 16 001 10-E-022/T06 4toE-T06, N5 否 11 602 10-E-023/T06 4toE-T06, N1 否 11 603 7-E-102/T06 4toE-T06, N4 否 11 605 E-T06-1 T06, 4toE-T06 是 11 607
下载: 导出CSV
表 3 部分泵节点信息
Table 3 Information of partial pump nodes
泵节点 流量 (m3/h) 扬程 (m) 额定功率 (kW) P01 47 175 8 P02 100 120 12 P03 200 160 32 P04 500 150 75 P07 800 150 120
下载: 导出CSV
表 5 实验任务设置
Table 5 Experimental task settings
子任务数 起始节点 目标节点 需求流量(m3/h) 2 T03 CDU-B 500 T11 CDU-A# 1 100 4 T01 CDU-B 300 T05 CDU-C 500 T08 CDU-A 1 300 T20 E-14去CDU-A# 300 6 T01 CDU-D 300 T05 CDU-B 500 T08 CDU-A 1 300 T13 CDU-A# 1 100 T20 E-14去CDU-A# 300 T17 E-12去CDU-A# 500
下载: 导出CSV
表 6 每个任务通过不同算法得到HV值的均值与标准差
Table 6 Each task obtains the mean and standard deviation of HV values through different algorithms
NSGA-III RVEA MOEAD-LWS PB-MOO 2子任务 9.287e + 2 (6.1e + 1) 8.124e + 2 (1.5e + 0) 8.176e + 2 (9.5e + 1) 1.061e + 3 (3.5e + 1) 4子任务 2.772e + 3 (1.9e + 2) 2.021e + 3 (2.4e + 2) 2.732e + 3 (1.3e + 3) 3.632e + 3 (3.8e + 2) 6子任务 4.275e + 3 (9.5e + 2) 3.726e + 3 (1.9e + 3) — 5.499e + 3 (1.9e + 2)
下载: 导出CSV
表 7 每个任务通过不同算法得到IGD值的均值与标准差
Table 7 Each task obtains the mean and standard deviation of IGD values through different algorithms
NSGA-III RVEA MOEAD-LWS PB-MOO 2子任务 7.461e + 0 (3.8e + 0) 9.123e + 0 (5.2e + 0) 1.865e + 1 (6.1e + 0) 3.543e + 0 (3.2e + 0) 4子任务 4.448e + 1 (3.7e + 1) 7.841e + 1 (4.6e + 1) 9.247e + 1 (1.1e + 1) 6.765e + 0 (2.1e + 0) 6子任务 5.167e + 1 (2.3e + 1) 1.054e + 2 (1.5e + 1) — 4.313e + 0 (1.5e + 0)
下载: 导出CSV
表 8 每个任务通过不同算法获得的最终解
Table 8 The final solution of each task obtained by different algorithms
NSGA-III RVEA MOEAD-LWS PB-MOO 2子任务 (25, 190.4) (26, 195.6) (26, 215.7) (24, 190.1) 4子任务 (60, 378.2) (57, 424.5) (52, 432.7) (52, 364.3) 6子任务 (90, 500.1) (93, 522.1) (91, 522.3) (89, 450.8)
下载: 导出CSV
-
[1] 黄德先, 江永亨, 金以慧. 炼油工业过程控制的研究现状、问题与展望. 自动化学报, 2017, 43(6): 902−916Huang De-Xian, Jiang Yong-Heng, Jin Yi-Hui. Present research situation, major bottlenecks, and prospect of refinery industry process control. Acta Automatica Sinica, 2017, 43(6): 902−916 [2] Zhang W T, Du W, Yu G, He R C, Du W L. Large-scale crude oil scheduling: A framework of hybrid optimization based on plan decomposition. In: Proceedings of 2022 IEEE Congress on Evolutionary Computation. Padua, Italy: IEEE, 2022. 1−8 [3] Zhang W T, Du W, Yu G, He R C, Jin Y C. Knowledge-assisted dual-stage evolutionary optimization of large-scale crude oil scheduling. IEEE Transactions on Emerging Topics in Computational Intelligence, 2024, 8(2): 1567−1581 doi: 10.1109/TETCI.2024.3353590 [4] Hou Y, Zhang Y X, Wu N Q, Zhu Q H. Constrained multi-objective optimization of short-term crude oil scheduling with dual pipelines and charging tank maintenance requirement. Information Sciences, 2022, 588: 381−404 doi: 10.1016/j.ins.2021.12.067 [5] Hou Y, Wu N Q, Zhou M C, Li Z W. Pareto-optimization for scheduling of crude oil operations in refinery via genetic algorithm. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(3): 517−530 doi: 10.1109/TSMC.2015.2507161 [6] Yin J, Huang R, Sun H, Cai S Y. Multi-objective optimization for coordinated production and transportation in prefabricated construction with on-site lifting requirements. Computers & Industrial Engineering, DOI: 10.1016/j.cie.2024.110017 [7] He C L, Zhang Y, Gong D W, Song X F, Sun X Y. A multitask bee colony band selection algorithm with variable-size clustering for hyperspectral images. IEEE Transactions on Evolutionary Computation, 2022, 26(6): 1566−1580 doi: 10.1109/TEVC.2022.3159253 [8] Fang Y L, Li Z Y, Wang S W, Lu X W. Multi-objective multi-fidelity optimisation for position-constrained human-robot collaborative disassembly planning. International Journal of Production Research, 2024, 62(11): 3872−3889 doi: 10.1080/00207543.2023.2251064 [9] Wang R Q, Zhang D M, Kang Z J, Zhou R C, Hui G. Study on deep reinforcement learning-based multi-objective path planning algorithm for inter-well connected-channels. Applied Soft Computing, DOI: 10.1016/j.asoc.2023.110761 [10] Zhu Z X, Wang F X, He S, Sun Y W. Global path planning of mobile robots using a memetic algorithm. International Journal of Systems Science, 2015, 46(11): 1982−1993 doi: 10.1080/00207721.2013.843735 [11] Suresh K S, Venkatesan R, Venugopal S. Mobile robot path planning using multi-objective genetic algorithm in industrial automation. Soft Computing, 2022, 26(15): 7387−7400 doi: 10.1007/s00500-022-07300-8 [12] Zhang W T, Du W L, Du W, He R C, Jin Y C. Large-scale continuous-time crude oil scheduling: A variable-length evolutionary optimization approach. IEEE Transactions on Automation Science and Engineering, DOI: 10.1109/TASE.2024.3380744 [13] Ramteke M, Srinivasan R. Large-scale refinery crude oil scheduling by integrating graph representation and genetic algorithm. Industrial & Engineering Chemistry Research, 2012, 51(14): 5256−5272 [14] Panda D, Ramteke M. Reactive scheduling of crude oil using structure adapted genetic algorithm under multiple uncertainties. Computers & Chemical Engineering, 2018, 116: 333−351 [15] Hou Y, Wu N Q, Li Z W. A genetic algorithm approach to short term scheduling of crude oil operations in refinery. IEEJ Transactions on Electrical and Electronic Engineering, 2016, 11(5): 593−603 doi: 10.1002/tee.22277 [16] Palakonda V, Kang J M. Pre-DEMO: Preference-inspired differential evolution for multi/many-objective optimization. IEEE Transactions on Systems, Man, and Cybernetics-Systems, 2023, 53(12): 7618−7630 doi: 10.1109/TSMC.2023.3298690 [17] Deb K, Sundar J. Reference point based multi-objective optimization using evolutionary algorithms. In: Proceedings of the 8th Annual Conference on Genetic and Evolutionary Computation. Seattle, USA: ACM SIGEVO, 2006. 635−642 [18] Zheng J H, Lai N, Guo G Q. $ \epsilon $-pareto dominance strategy based on angle preference in MOEA. Pattern Recognition and Artificial Intelligence, 2014, 27(6): 569−575 [19] Chaudhuri S, Deb K. An interactive evolutionary multi-objective optimization and decision making procedure. Applied Soft Computing, 2010, 10(2): 496−511 doi: 10.1016/j.asoc.2009.08.019 [20] Wang C, Jiao L C, Zhao J X, Li L L, Liu X, Liu F, et al. Bi-level multiobjective evolutionary learning: A case study on multitask graph neural topology search. IEEE Transactions on Evolutionary Computation, 2024, 28(1): 208−222 doi: 10.1109/TEVC.2023.3255263 [21] Deb K, Pratap A, Agarwal S, Meyarivan T. A fast and elitist multiobjective geneticalgorithm: NSGA-II. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182−197 doi: 10.1109/4235.996017 [22] Yao Y, Peng Z, Xiao B. Parallel hyper-heuristic algorithm for multi-objective route planning in a smart city. IEEE Transactions on Vehicular Technology, 2018, 67(11): 10307−10318 doi: 10.1109/TVT.2018.2868942 [23] While L, Hingston P, Barone L, Huband S. A faster algorithm for calculating hypervolume. IEEE Transactions on Evolutionary Computation, 2006, 10(1): 29−38 doi: 10.1109/TEVC.2005.851275 [24] Zitzler E, Thiele L, Laumanns M, Fonseca C M, Fonseca V G. Performance assessment of multiobjective optimizers: An analysis and review. IEEE Transactions on Evolutionary Computation, 2003, 7(2): 117−132 doi: 10.1109/TEVC.2003.810758 [25] Deb K, Jain H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Transactions on Evolutionary Computation, 2014, 18(4): 577−601 doi: 10.1109/TEVC.2013.2281535 [26] Wang R, Zhou Z B, Ishibuchi H, Liao T J, Zhang T. Localized weighted sum method for many-objective optimization. IEEE Transactions on Evolutionary Computation, 2018, 22(1): 3−18 doi: 10.1109/TEVC.2016.2611642 [27] Cheng R, Jin Y C, Olhofer M, Sendhoff B. A reference vector guided evolutionary algorithm for many-objective optimization. IEEE Transactions on Evolutionary Computation, 2016, 20(5): 773−791 doi: 10.1109/TEVC.2016.2519378 期刊类型引用(0)
其他类型引用(11)
-

 下载:
下载:
































































计量
- 文章访问数: 354
- HTML全文浏览量: 153
- PDF下载量: 112
- 被引次数: 11
