

Modeling and Control of Dielectric Elastomer Actuator Based on Neural Ordinary Differential Equation and Nonlinear Model Predictive Control
-
摘要: 针对介电弹性体驱动器(Dielectric elastomer actuator, DEA)建模与控制的挑战性问题, 提出基于神经网络常微分方程(Ordinary differential equation, ODE)和非线性模型预测控制(Model predictive control, MPC)的DEA动力学建模与跟踪控制方法. 首先, 基于神经网络ODE建立DEA的动力学模型以描述其复杂的动态行为. 然后, 基于所建立的DEA动力学模型, 设计非线性模型预测控制器实现其跟踪控制目标. 最后, 在所搭建的实验平台上进行一系列跟踪控制实验. 在所有实验结果中, DEA的运动均能很好地跟踪目标轨迹, 且相对均方根误差均不超过3.30%, 说明了所提动力学建模与跟踪控制方法的有效性.Abstract: For challenging problems in modeling and control of dielectric elastomer actuators (DEA), this paper proposed dynamic modeling and tracking control methods for a DEA based on the neural ordinary differential equation (ODE) and nonlinear model predictive control (MPC). First, a dynamic model of the DEA was established based on the neural ODE to describe its complicated dynamics behavior. Then, based on the established dynamic model of the DEA, a nonlinear model predictive controller was designed to realize its tracking control objective. Finally, a series of tracking control experiments were conducted on the built experimental platform. In all experimental results, the motion of the DEA can track the target trajectory well, and all relative root-mean-square-errors are no more than 3.30%, which illustrates the effectiveness of proposed dynamic modeling and tracking control methods.
-
水面无人艇是一种无需人工操作的自主水面舰艇, 具有自主性强、成本低、灵活性高等优势. 它可以在危险或人类难以进入的水域执行任务, 广泛应用于民用和军事领域. 例如, 在环境监测、渔业管理、海上搜救、物流运输、通信中继、侦察监视及巡逻防御等方面发挥重要作用[1-6]. 然而, 由于单个无人艇的执行能力有限, 往往难以胜任复杂水域任务. 在此背景下, 多无人艇(Multiple unmanned surface vehicle, Multi-USV)协同作业正逐渐成为未来的发展趋势. 在协同作业中, 多艘无人艇通过协同工作, 共同完成复杂水域任务, 如大范围的海洋协同监测、搜索与救援、水下地形协同测绘和水下目标协同探测等. 值得注意的是, 在某些实际应用场景中, 通过引入无人艇之间的竞争交互机制, 可以有效提升多无人艇协同作业的能力[7-8]. 在这种情形下, 底层信息交互拓扑图往往被建模为符号图. 特别地, 二分编队跟踪控制是符号图下多无人艇系统编队控制领域的基础研究课题之一, 旨在设计一组分布式控制协议, 使得多无人艇系统能够以预设的二分编队构型跟踪参考轨迹[8].
在多无人艇系统编队控制领域, 基于反推控制方法的研究成果丰硕[5, 9-12]. 反推控制是一种基于Lyapunov 理论的递归控制方案设计方法, 自20世纪90年代起便受到系统与控制领域学者们的广泛关注[13-15]. 该方法通过将高阶非线性系统拆分为多个较为简单的低阶系统, 并引入虚拟控制器和参数自适应更新律, 以确保闭环系统的稳定性, 从而逐步推导出实际控制器[14]. 然而, 反推控制方法在控制器设计过程中通常需要使用参考轨迹的高阶导数, 并对系统动力学模型的要求较高. 为了克服这些挑战, 文献[16] 引入命令滤波技术, 避免对虚拟控制器求导, 显著降低了计算负担, 简化了控制律的设计和形式, 从而使得该方法能够适用于更广泛的非线性系统. 然而, 基于命令滤波反推方法的多无人艇系统二分编队跟踪控制的研究目前见诸文献的结果还相对较少.
如文献[17-18] 所述, 无人艇在执行实际任务时, 往往会受到风、浪、水流等环境因素的干扰, 这些因素可能导致无人艇的运行不稳定甚至引发事故. 为了增强控制系统的稳定性和鲁棒性, 考虑模型不确定性变得尤为重要. 在处理具有模型不确定性的非线性系统控制问题时, 确保参数收敛性是一个核心环节, 因为它能够提升闭环系统的整体稳定性和鲁棒性. 传统基于梯度下降法的参数自适应律设计方法, 存在参数漂移的潜在威胁. 在此基础上, 添加阻尼项可以有效抑制其影响, 但是在这种参数自适应律设计方法下人们往往难以证明闭环系统的渐近稳定性. 此外, 在传统的自适应控制中, 必须满足一个严格的持续激励 (Persistent excitation, PE) 条件, 以保证参数的收敛性. 然而, 在实际场景下, PE条件通常难以验证. 为了放松PE条件, 在文献[19]和文献[20]中分别提出了并行学习和复合学习技术, 在较弱的区间激励(Interval excitation, IE) 条件下, 确保了参数的收敛性. 此外, 与并行学习方法相比, 由于复合学习自适应律的设计不依赖于系统状态的导数, 在实际应用中往往更具有优势. 另一方面, 无人艇在执行任务时通常要求快速的控制响应. 引入有限时间或固定时间控制技术[21-22] 可以使受控系统在有限时间内达成目标. 此外, 有限时间及固定时间控制技术不仅可以保证跟踪误差的快速收敛, 而且对不确定性具有良好的鲁棒性.
基于以上讨论, 本文针对模型参数不确定下多无人艇系统的固定时间二分编队跟踪控制问题, 提出一组融合命令滤波、复合学习及反推控制技术的分布式控制协议. 本文的贡献可以概括为以下两个方面: 在反推控制方法中引入命令滤波, 有效地避免了对虚拟控制器求导, 极大地降低了计算负担, 且简化了分布式控制协议的形式; 在反推控制方法中引入复合学习, 使得提出的控制协议在不满足PE条件的情况下, 不仅能够确保编队误差的固定时间收敛性, 也能够确保参数估计误差的固定时间收敛性.
本文使用的符号: $ {\bf{R}}^n $和$ {\bf{R}}^{n\times m} $分别表示 $ n $ 维向量空间和$ n\times m $ 阶实矩阵的集合; $ {\rm diag}\{R_i\}= {\rm diag}\{R_1,\;\cdots,\;R_N\} $表示块对角矩阵, 其中矩阵$ R_1,\;\cdots,\;R_N\in{\bf{R}}^{n\times n} $ 在该矩阵的对角线上; $ \varnothing $ 表示空集; $ \Vert\cdot\Vert $ 表示向量的$ 2 $ 范数; $ {\rm sign}(\cdot) $ 表示符号函数; $ |\cdot| $ 表示标量的绝对值; $ \otimes $ 表示Kronecker积; 给定向量函数$ \delta(t)=(\delta_1(t),\;\cdots,\;\delta_N(t))^{\mathrm{T}}\in{\bf{R}}^{N} $和常数$ \gamma > 0 $, 定义$ {\rm sig}\{\delta(t)\}^{\gamma} = (|\delta_1(t)|^{\gamma}{\rm sign}(\delta_1(t)),\; \cdots,$ $ |\delta_N(t)|^{\gamma}{\rm sign}(\delta_N(t)))^{\rm T} $; 给定对称矩阵$ Q\in{\bf{R}}^{m\times m} $, $ Q>{\bf{0}} $ 表示$ Q $ 是正定矩阵, $ \lambda_{\min}(Q),\; $ $ \lambda_{\max}(Q) $ 分别表示对称矩阵$ Q $ 的最小和最大特征值; $ I_n $ 表示$ n $ 维单位矩阵.
1. 预备知识和问题描述
1.1 代数图论
给定一个符号无向图$ {\cal{G}}=({\cal{I}},\; {\cal{E}},\; {\cal{A}}) $ 用以描述多无人艇系统的通信情况, 其中, $ {\cal{I}}=\{1,\; 2,\; \cdots,\; N\} $, $ {\cal{E}}=\{(i,\; j): i,\;j\in{\cal{I}}\} \subseteq{\cal{I}}\times{\cal{I}} $ 和$ {\cal{A}}=[a_{ij}]\in {\bf{R}}^{N\times N} $分别表示节点集、边集和符号邻接矩阵, 满足: 若$ (j,\;i)\in{\cal{E}} $ 则表示智能体$ i $可以接收到智能体 $ j $的信息, 否则表示不能接收到; 若$ i\neq j $ 且$ (j,\; i)\in{\cal{E}} $ 则$ a_{ij}\neq 0 $, 否则$ a_{ij}=0 $. 节点 $ i $ 的邻居集定义为$ {\cal{N}}_i=\{j: a_{ij}\neq 0\} $. 通信拓扑图的 Laplacian 矩阵定义为$ {\cal{L}}={\rm diag}\Big\{\sum\nolimits_{j\in{\cal{N}}_i}|a_{ij}|\Big\}-{\cal{A}} $. 给定一个包含$ N+1 $ 个节点的符号有向图$ {\cal{\bar{G}}}=({\cal{\bar{I}}},\;{\cal{\bar{E}}}) $, 其中, $ {\cal{\bar{I}}}= {\cal{I}}\cup\{0\} $; $ {\cal{\bar{E}}}\subseteq {\cal{I}} \times{\cal{I}} $; 节点0表示领航无人艇, 它仅向跟随无人艇传递信息而不接收信息. 牵引矩阵记为$ {\cal{B}}={\rm diag}\{b_i\} $, 满足: 若无人艇$ i $能接收到领航者的信息则$ b_i>0 $; 否则, $ b_i=0 $.
定义 1[23]. 若存在节点集的划分$ {\cal{I}}_1,\; {\cal{I}}_2 $ 满足: 1) $ {\cal{I}}_1\cup{\cal{I}}_2={\cal{I}} $; 2) $ {\cal{I}}_1\cap{\cal{I}}_2=\varnothing $; 3) 若$ i,\;j $ 同属于一个集合$ {\cal{I}}_1 $或$ {\cal{I}}_2 $, 则$ a_{ij}\geq 0 $, 否则$ a_{ij}\leq 0 $, 则符号图$ {\cal{G}} $被称作结构平衡的.
引入对角矩阵$ E={\rm diag}\{\varepsilon_i\} $, 其中, $ \varepsilon_i=1,\; i\in {\cal{I}}_1 $; $ \varepsilon_i=-1,\; i\in{\cal{I}}_2 $. 定义$ {\cal{\tilde{L}}}=E{\cal{L}}E $.
1.2 固定时间稳定性
定义2[24]. 给定如下非线性系统
$$ \dot{x}(t)=f(t,\;x(t)) $$ 式中, $ x(t)\in{\bf{R}}^n,\; f(t,\;x(t))\in{\bf{R}}^n $分别表示系统状态和局部 Lipschitz 连续函数. 若该系统的原点是全局渐进稳定的, 且存在与状态初值无关的时刻$ T $满足$ x(t)=0,\; \forall t\geq T $, 则称原点是固定时间稳定的.
引理 1[25]. 若存在常数$ c_1,\;c_2,\; m_1,\; m_2 $和连续径向无界标量函数$ {\cal{V}}(x(t)) $, 满足$ c_1>0,\; c_2>0 $, $ 0< m_1<1<m_2 $ 以及
$$ \dot{{\cal{V}}}(x(t))\leq -c_1{\cal{V}}^{m_1}(x(t))-c_2{\cal{V}}^{m_2}(x(t)) $$ 则原点是固定时间稳定的, 且稳定时间$ T_s $满足
$$ T_s\leq\frac{1}{c_1(1-m_1)}+\frac{1}{c_2(m_2-1)} $$ 进一步地, 若下式成立
$$ \dot{{\cal{V}}}(x(t))\leq -c_1{\cal{V}}^{m_1}(x(t))-c_2{\cal{V}}^{m_2}(x(t))+{\cal{C}} $$ 式中, $ {\cal{C}}>0 $为常参数, 则称原点是实用固定时间稳定的, 且稳定时间$ T_s $满足
$$ T_s\leq\frac{1}{c_1c(1-m_1)}+\frac{1}{c_2c(m_2-1)},\;\quad c\in(0,\;1) $$ 1.3 问题描述
考虑由$ N $艘无人艇组成的集群二分编队跟踪系统. 第$ i,\; i\in{\cal{I}} $艘跟随无人艇的运动学与动力学模型描述为[8]
$$ \dot{\eta}_i(t)=R(\psi_i(t))v_i(t) $$ (1) $$ M_i \dot{v}_i(t)=f_i(v_i(t))+\tau_i(t)+\phi_{i}(v_i(t))\Theta_i $$ (2) 式中, $ \eta_i(t)\;=\;(x_i(t),\; y_i(t),\; \psi_i(t))^{\rm T}\in{\bf{R}}^3 $, $ (x_i(t),\; y_i(t))^{\rm T}\in {\bf{R}}^2 $ 和$ \psi_i(t)\in{\bf{R}} $ 分别表示第$ i $艘无人艇在地面坐标系下的位置向量和偏航角; $ v_i(t)=(u_i^1(t),\; u_i^2(t),\; u_i^3(t))^{\rm T}\in{\bf{R}}^3 $表示第$ i $艘无人艇在体坐标系下的速度向量, $ u_i^1(t),\; u_i^2(t) $和$ u_i^3(t) $分别表示前向速度、横向速度和转向角速度; $ \tau_i(t)\in{\bf{R}}^3 $表示第$ i $艘无人艇的控制输入; $ R(\psi_i(t))\in{\bf{R}}^{3\times 3} $是转换矩阵, 形式如下
$$ R(\psi_i(t))= \left[\begin{array}{ccc} \cos(\psi_i(t))& -\sin(\psi_i(t))& 0\\ \sin(\psi_i(t))& \cos(\psi_i(t))& 0\\ 0 & 0 & 1 \end{array}\right] $$ $ f_i(v_i(t))=(f_{i1}(v_i(t)),\, f_{i2}(v_i(t)),\, f_{i3}(v_i(t)))^{\mathrm{T}}\in{\bf{R}}^{3} $ 是一个非线性向量函数; $M_i\in{\bf{R}}^{3\times 3}>{\bf{0}} $表示惯性矩阵; $ \phi_{i}(v_i(t))\Theta_i\in{\bf{R}}^{3} $表示参数不确定性, $ \phi_{i}(v_i(t))\in {\bf{R}}^{3\times m} $是已知的非线性函数, $ \Theta_i\in{\bf{R}}^{m} $是未知的常参数. 领航无人艇0的状态信号记为$ \eta_0(t)=(x_0(t),\; y_0(t),\; \psi_0(t))\in{\bf{R}}^3 $和$ v_0(t)\in{\bf{R}}^3 $.
期望编队向量记为$ h=(h_{1}^{\mathrm{T}},\;\cdots,\;h_{N}^{\mathrm{T}})^{\mathrm{T}}\in{\bf{R}}^{3N} $, 其中, $ h_{i}=(h_{i}^1,\;h_{i}^2,\;h_{i}^3)^{\mathrm{T}}\in{\bf{R}}^3,\; i\in{\cal{I}} $表示无人艇$ i $与领航无人艇$ 0 $之间期望的位置差. $ h_{i} $仅用于描述期望编队构型, 不用于为跟随无人艇提供参考轨迹. 本文的控制目标是: 设计一组分布式控制器, 使得遭受模型参数不确定性影响的多无人艇系统 (1) ~ (2) 实现固定时间二分编队跟踪, 即
$$ \lim_{t\rightarrow T_i}\Vert e_i(t) \Vert=0,\;\quad \forall i\in{\cal{I}} $$ 式中, $ T_i>0 $ 是一个常参数; $ e_i(t)=\eta_i(t)-h_i\;- \varepsilon_i\eta_0(t)\in{\bf{R}}^3 $ 是编队误差. 为设计控制器, 给出以下假设、引理和定义.
假设 1. 有向图$ {\cal{\bar{G}}} $ 具有有向生成树, $ 0 $是其根节点; 无向图$ {\cal{G}} $是连通的且结构平衡的.
假设 2. 参考轨迹$ \eta_0(t) $及其一阶导数$ \dot{\eta}_0(t) $是有界的, 即, 存在正常数$ \bar{\eta}_0\in {\bf{R}} $, 使得$ \Vert\eta_0(t)\Vert\leq \bar{\eta}_0 $和$ \Vert\dot{\eta}_0(t)\Vert\leq \bar{\eta}_0 $成立. 此外, $ \bar{\eta}_0 $仅部分和领航无人艇有通信的无人艇可知.
引理 2[26]. 给定标量函数$ z_1(t),\; \cdots,\; z_{\bar{\rho}}(t) $ 和常数$ \vartheta $, 以下不等式成立
$$ \left\{\begin{split} &\left(\sum_{\rho=1}^{\bar{\rho}} z_{\rho}(t)\right)^{\vartheta}\leq \sum_{\rho=1}^{\bar{\rho}}z_{\rho}^{\vartheta}(t),\;\quad 0 <\vartheta\leq 1\\ & \bar{\rho}^{1-\vartheta}\left(\sum_{\rho=1}^{\bar{\rho}} z_{\rho}(t)\right)^{\vartheta}\leq \sum_{\rho=1}^{\bar{\rho}}z_{\rho}^{\vartheta}(t),\; \quad \vartheta > 1 \end{split}\right. $$ 定义 3[27]. 给定一个矩阵函数$ \Delta(t)\in{\bf{R}}^{n\times m} $, 若存在常数$ \tilde{t},\; \mu $满足$ 0<\tilde{t}<t,\; \mu>0 $使$ \int_{t-\tilde{t}}^t\Delta^{\rm T} (\sigma)\;\times \Delta(\sigma) {\mathrm{d}}\sigma\geq \mu I_m,\; \forall t\geq 0 $ 成立, 则 $ \Delta(t) $ 被称作PE信号.
定义 4[27]. 给定一个矩阵函数$ \Delta(t)\in{\bf{R}}^{n\times m} $, 若存在常数$ \hat{t},\; \tilde{t},\; \mu $满足$ 0<\tilde{t}<\hat{t},\; \mu>0 $使$ \int_{\hat{t}-\tilde{t}}^{\hat{t}}\Delta^{\rm T} (\sigma) \times \; \Delta(\sigma){\mathrm{d}}\sigma\geq \mu I_m $成立, 则$ \Delta(t) $被称作IE信号.
注 1. 在分布式场景下, 无人艇$ i,\; i\in{\cal{I}} $仅能获得相对信息$ \eta_i(t)-{\rm sign}(a_{ij})\eta_j(t) $和 $ h_{ij}=h_i- {\rm sign} (a_{ij})h_j $; 部分与领航无人艇有通信连接的无人艇能获得全局信息$ \eta_0(t) $和$ h_i $.
注 2. 对比定义3和定义4, IE条件明显弱于PE条件.
2. 复合学习固定时间二分编队控制协议设计
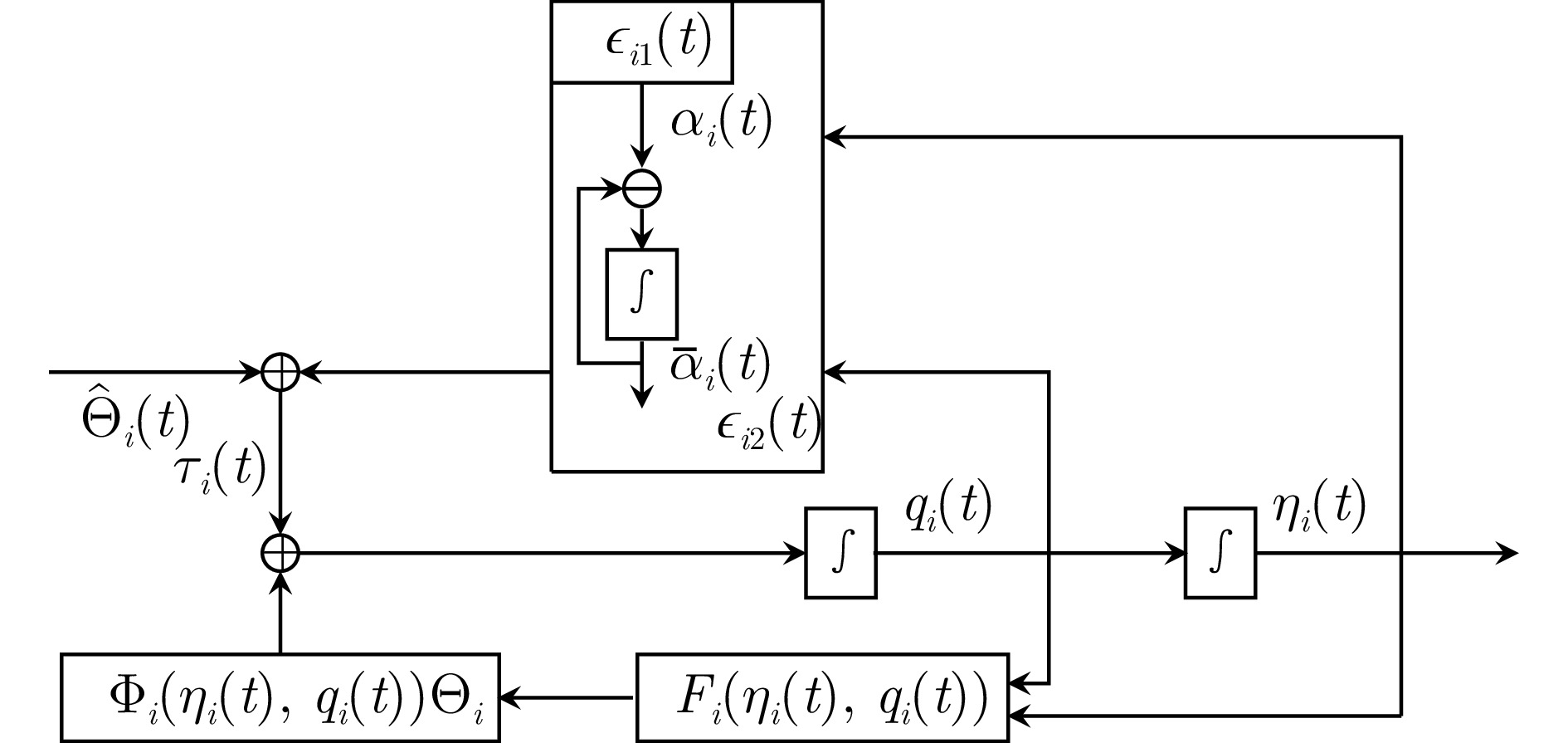
在本节中, 提出了一组复合学习固定时间二分编队控制协议, 图1中给出了控制程序和控制信号框图.
2.1 控制器设计
令$ q_i(t)=R(\psi_i(t))v_i(t) $, 则系统(1) ~ (2)可转化为
$$ \dot{\eta}_i(t)= q_i(t) $$ (3) $$ \begin{split} \dot{q}_i(t)=&\; F_i(\eta_i(t),\;q_i(t)) +g_i(\eta_i(t),\;q_i(t))\tau_i(t)\;+\\ & \Phi_{i}(\eta_i(t),\;q_i(t))\Theta_i \end{split} $$ (4) 式中, $ F_i(\eta_i(t),\,q_i(t))\;\;=\;\;R(\psi_i(t))M_i^{-1}f_i(v_i(t))\;+ \dot{R} (\psi_i(t)) v_i(t) $, $ g_i(\eta_i(t),\;q_i(t))\;\;=\;\;R(\psi_i(t))M_i^{-1} $ 以及$ \Phi_{i} (\eta_i(t),\; q_i(t))= R(\psi_i(t))M_i^{-1}\phi_{i}(v_i(t)) $.
对于第$ i,\; i\in{\cal{I}} $ 艘无人艇, 定义如下的局部跟踪误差信号
$$ \begin{split} \epsilon_{i1}(t)=&\;\sum\limits_{j\in{\cal{N}}_i}|a_{ij}|\left(\eta_i(t)-{\rm sign}(a_{ij})\eta_j(t)-h_{ij}\right)+\\ & b_i\left(\eta_i(t)-\varepsilon_i\eta_0(t)-h_i\right)\\[-1pt] \end{split} $$ (5) $$ \epsilon_{i2}(t)= q_i(t)-\bar{\alpha}_i(t) $$ (6) 式中, $ \alpha_i(t)\in{\bf{R}}^{3} $ 为虚拟控制输入, $ \bar{\alpha}_i(t)\in{\bf{R}}^{3} $ 为$ \alpha_i(t) $ 的命令滤波对应量, 其满足
$$ \dot{\bar{\alpha}}_i(t)=-w_i\tilde{\alpha}_i(t) $$ (7) 其中, $ \tilde{\alpha}_i(t)=\bar{\alpha}_i(t)-\alpha_i(t) $ 为滤波误差, $ w_i>0 $ 为常参数. 接下来, 介绍无人艇控制协议的具体设计程序.
步骤 1. 定义$ \epsilon_{1}(t)=(\epsilon_{11}^{\rm T}(t),\;\cdots,\;\epsilon_{N1}^{\rm T}(t))^{\rm T} $. 根据(3)、(5)和(6)可得
$$ \dot{\epsilon}_{1}(t)=\left(({\cal{L}}+{\cal{B}})\otimes I_3\right)\Xi(t)$$ (8) 式中, $ \Xi(t)= \begin{pmatrix} \epsilon_{12}(t)+\tilde{\alpha}_1(t)+\alpha_1(t)-\varepsilon_1\dot{\eta}_0(t)\\ \vdots\\ \epsilon_{N2}(t)+\tilde{\alpha}_N(t)+\alpha_N(t)-\varepsilon_N\dot{\eta}_0(t)\\ \end{pmatrix} . $虚拟控制输入设计为:
$$ \begin{split} \alpha_i(t)=\;&-\left(k_{i1}+\frac{1}{2}+\nu_i\right)\epsilon_{i1}(t)\;-\\ & \eta_{0i}(t)\frac{\epsilon_{i1}(t)}{\sqrt{\|\epsilon_{i1}(t)\|^2+\rho_i^2(t)}}\;-\\ & \sum_{l=1}^2c_l{\rm sig}\{\epsilon_{i1}(t)\}^{m_l} \end{split} $$ (9) 式中, $ k_{i1}>0,\; c_l>0,\; 0<m_1<1<m_2,\; \nu_i>0 $为待设计的常参数; $ \rho_i(t)\in{\bf{R}}>0 $满足$ \int_0^{+\infty}\rho_i(t){\mathrm{d}}t< +\infty $和$ |\rho_i(t)|\leq\bar{\rho}_i $; $ \eta_{0i}(t)\in{\bf{R}} $是对$ \bar{\eta}_0 $的估计, 根据下式更新:
$$ \dot{\eta}_{0i}(t)=-\sum_{l=1}^2c_l{\rm sig}\{\xi_i(t)\}^{m_l} $$ (10) 其中, $ \xi_i(t) = \sum\nolimits_{j\in {\cal{N}}_i}|a_{ij}|(\eta_{0i}(t)-\eta_{0j}(t))+b_i(\eta_{0i}(t)\;- \bar{\eta}_0) $.
将 (9) 代入 (8) 可得闭环误差系统
$$ \dot{\epsilon}_{1}(t)=\left(({\cal{L}}+{\cal{B}})\otimes I_3\right)\tilde{\Xi}(t) $$ (11) 式中
$$\begin{split} &\tilde{\Xi}(t)=\epsilon_{2}(t)+\tilde{\alpha}(t)-{\rm diag}\left\{\left(k_{i1}+\frac{1}{2}+ \nu_i\right)\otimes I_3\right\}\times \\ &\;\;\;\; \epsilon_{1}(t) - \begin{pmatrix} \displaystyle\frac{\eta_{01}(t)\epsilon_{11}(t)}{\sqrt{\|\epsilon_{11}(t)\|^2+\rho_1^2(t)}}+\varepsilon_1\dot{\eta}_0(t)\\\vdots\\ \displaystyle\frac{\eta_{0N}(t)\epsilon_{N1}(t)}{\sqrt{\|\epsilon_{N1}(t)\|^2+\rho_N^2(t)}}+\varepsilon_N\dot{\eta}_0(t)\\ \end{pmatrix} -\\ &\;\;\;\; \sum\limits_{l=1}^2c_l{\rm sig}\{\epsilon_{1}(t)\}^{m_l}\end{split} $$ 其中, $ \epsilon_{2}(t) = (\epsilon_{12}^{\rm T}(t),\;\cdots,\; \epsilon_{N2}^{\rm T}(t))^{\rm T}$和 $ \tilde{\alpha}(t) = (\tilde{\alpha}_1^{\rm T}(t),\; \cdots,\;\tilde{\alpha}_N^{\rm T}(t))^{\rm T} $.
选择如下的 Lyapunov 函数
$$ V_{1}(t)=\frac{1}{2}\epsilon_{1}^{\mathrm{T}}(t)\left(({\cal{L}}+{\cal{B}})\otimes I_3\right)^{-1}\epsilon_{1}(t) $$ 由 (11) 可推出
$$ \begin{split} \dot{V}_{1}(t) \leq\;& -\epsilon_{1}^{\mathrm{T}}(t){\rm diag}\left\{\left(k_{i1}+\nu_i\right)\otimes I_3\right\}\epsilon_{1}(t)\ +\\ & \frac{1}{2}\epsilon_{2}^{\mathrm{T}}(t)\epsilon_{2}(t) -\sum\limits_{l=1}^2c_l\epsilon_{1}^{\mathrm{T}}(t){\rm sig}\{\epsilon_{1}(t)\}^{m_l}\ -\\ & \sum\limits_{i=1}^N\frac{\tilde{\eta}_{0i}(t)\|\epsilon_{i1}(t)\|^2}{\sqrt{\|\epsilon_{i1}(t)\|^2+\rho_i^2(t)}} +\sum\limits_{i=1}^N\bar{\eta}_0\rho_i(t)\ +\\ & \epsilon_{1}^{\mathrm{T}}(t)\tilde{\alpha}(t)\\[-1pt] \end{split} $$ (12) 式中, $ \tilde{\eta}_{0i}(t)=\eta_{0i}(t)-\bar{\eta}_0 $ 表示参数估计误差. 定义全局参数估计误差$ \tilde{\eta}_{0}(t)=(\tilde{\eta}_{01}^{\rm T}(t),\;\cdots,\;\tilde{\eta}_{0N}^{\rm T}(t))^{\rm T} $.
步骤 2. 利用 (4)、(6) 和 (7) 可得
$$ \begin{split} \dot{\epsilon}_{i2}(t)=\;& g_i(\eta_i(t),\;q_i(t))\Big(g_i^{-1}(\eta_i(t),\;q_i(t))w_i\tilde{\alpha}_i(t)\ +\\ & \tau_i(t) +g_i^{-1}(\eta_i(t),\;q_i(t))\Phi_{i}(\eta_i(t),\;q_i(t))\Theta_i\ +\\ & g_i^{-1}(\eta_i(t),\;q_i(t))F_i(\eta_i(t),\;q_i(t))\Big)\\[-1pt] \end{split} $$ (13) 控制输入可以设计为
$$ \begin{split} \tau_i(t)=&\;-g_i^{-1}(\eta_i(t),\;q_i(t))\Big(\Big(k_{i2}+\frac{1}{2}\Big)\epsilon_{i2}(t)\ +\\ & F_i(\eta_i(t),\;q_i(t)) +\sum_{l=1}^2c_l{\rm sig}\{\epsilon_{i2}(t)\}^{m_l}\ +\\ & w_i\tilde{\alpha}_i(t) +\Phi_{i}(\eta_i(t),\;q_i(t))\hat{\Theta}_i(t)\Big)\end{split} $$ (14) 式中, $ k_{i2}>0 $为待设计的常参数, $ \hat{\Theta}_i(t)\in{\bf{R}}^{m} $是对$ \Theta_i $的估计.
将 (14) 代入 (13) 可得闭环误差系统
$$ \begin{split} \dot{\epsilon}_{i2}(t)=&-\left(k_{i2}+\frac{1}{2}\right)\epsilon_{i2}(t)-\Phi_{i}(\eta_i(t),\;q_i(t))\tilde{\Theta}_i(t)\ -\\ & \sum_{l=1}^2c_l{\rm sig}\{\epsilon_{i2}(t)\}^{m_l}\\[-1pt]\end{split} $$ (15) 式中, $ \tilde{\Theta}_i(t)=\hat{\Theta}_i(t)-\Theta_i $ 为参数估计误差.
为了自适应地估计未知参数$ \Theta_i $, 给出滤波信号$ q_{i}^{f}(t)\in{\bf{R}}^3,\; H_{i}^{f}(t)\in{\bf{R}}^3,\; \Phi_{i}^{f}(t)\in{\bf{R}}^{3\times m} $和辅助变量$ \Lambda_i(t)\in{\bf{R}}^{m\times m},\; \Upsilon_i(t)\in{\bf{R}}^{m} $, 其按下式更新
$$ \left\{ \begin{array}{l} \beta_i\dot{q}_{i}^{f}(t)+q_{i}^{f}(t)=q_i(t)\\ \beta_i\dot{H}_{i}^{f}(t)+H_{i}^{f}(t)= H_{i}(t) \\ \beta_i\dot{\Phi}_{i}^{f}(t)+\Phi_{i}^{f}(t)=\Phi_{i}(\eta_i(t),\;q_i(t)) \end{array}\right. $$ (16) $$ \left\{\begin{split} &\Lambda_{i}(t)=\int_{t-o_i}^t\Phi_{i}^{f{\mathrm{T}}}(\sigma)\Phi_{i}^{f}(\sigma){\mathrm{d}}\sigma\\ &\Upsilon_{i}(t)=\int_{t-o_i}^t\Phi_{i}^{f{\mathrm{T}}}(\sigma) \left(\frac{q_{i}(\sigma)- q_{i}^{f}(\sigma)} {\beta_i}-H_{i}^{f}(\sigma)\right){\mathrm{d}}\sigma \end{split}\right. $$ (17) 式中, $ \beta_i>0 $, $ t>o_i\geq0 $是常数, $ H_{i}(t)\;=\;F_i (\eta_i(t), q_i(t))+g_i(\eta_i(t),\;q_i(t))\tau_i(t) $. 联立 (4)、(16) 和 (17) 可得
$$ \Lambda_{i}(t)\Theta_{i}=\Upsilon_{i}(t) $$ (18) 定义如下的预测误差函数$ {\cal{P}}_i(t)\in{\bf{R}}^{m} $:
$$ \begin{aligned} {\cal{P}}_i(t)= \begin{cases} \Lambda_{i}(t)\hat{\Theta}_i(t),\;& t<p_i\;\\ \Lambda_{i}(p_i)\hat{\Theta}_i(t)-\Upsilon_{i}(p_i),\;& t\geq p_i\; \end{cases} \end{aligned} $$ (19) 式中, $ p_i $是矩阵$ \Lambda_{i}(t)>{\bf{0}} $的时刻. 参数估计$ \hat{\Theta}_i(t) $的更新律设计如下:
$$ \begin{split} \dot{\hat{\Theta}}_i(t)=\ &\Gamma_i\Phi_{i}^{\mathrm{T}}(\eta_i(t),\;q_i(t))\epsilon_{i2}(t)\ -\\ & \Gamma_i\Lambda_{i}^{\mathrm{T}}(t)\sum_{l=1}^2c_l{\rm sig}\{{\cal{P}}_i(t)\}^{m_l} \end{split} $$ (20) 式中, $ \Gamma_i\in{\bf{R}}^{m\times m}>{\bf{0}} $ 代表参数学习率.
选择如下的 Lyapunov 函数:
$$ V_{2}(t)=\frac{1}{2}\epsilon_{2}^{\mathrm{T}}(t)\epsilon_{2}(t)+\frac{1}{2}\sum_{i=1}^N\tilde{\Theta}_i^{\mathrm{T}}(t)\Gamma_i^{-1}\tilde{\Theta}_i(t) $$ 根据 (15) 和 (20), 对于$ t\geq \max _{i\in{\cal{I}}}\{p_i\} $有
$$ \begin{split} \dot{V}_{2}(t)=\ &-\epsilon_{2}^{\rm T}(t){\rm diag}\left\{\left(k_{i2}+\frac{1}{2}\right)\otimes I_3\right\}\epsilon_{2}(t)\ -\\& \sum_{l=1}^2c_l\epsilon_{2}^{\rm T}(t){\rm sig}\{\epsilon_{2}(t)\}^{m_l}\ -\\& \sum_{l=1}^2c_l{\cal{P}}^{\rm T}(t){\rm sig}\{{\cal{P}}(t)\}^{m_l}\\[-1pt] \end{split} $$ (21) 式中, $ {\cal{P}}(t)=({\cal{P}}_1^{\rm T}(t),\;\cdots,\;{\cal{P}}_N^{\rm T}(t))^{\rm T} $.
注 3. 由 (5) 可推出, $ \epsilon_{1}(t)=(({\cal{L}}+{\cal{B}})\otimes I_3)e(t) $, 其中, $ e(t)=(e_1^{\rm T}(t),\;\cdots,\;e_N^{\rm T}(t))^{\mathrm{T}} $. 此外, 在假设1满足时, 有$ {\cal{L}}+{\cal{B}}>{\bf{0}} $和$ {\cal{\tilde{L}}}+{\cal{B}}>{\bf{0}} $成立.
2.2 稳定性分析
在给出最终稳定性结果之前, 首先给出如下引理.
引理 3. 在假设1和假设2满足时, 全局参数估计误差$ \tilde{\eta}_{0}(t) $在固定时间内收敛到零, 收敛时间$ T_{\eta} $满足$ T_{\eta}\leq\frac{1}{\kappa_1(1-\iota_1)}+\frac{1}{\kappa_2(\iota_2-1)} $.
证明. 根据 (10) 有
$$ \dot{\tilde{\eta}}_{0}(t)=-\sum_{l=1}^2c_l{\rm sig}\{(({\cal{\tilde{L}}}+{\cal{B}})\otimes I_3)\tilde{\eta}_{0}(t)\}^{m_l}$$ (22) 选择如下的 Lyapunov 函数
$$ L(t)=\frac{1}{2}\tilde{\eta}_{0}^{\rm T}(t)(({\cal{\tilde{L}}}+{\cal{B}})\otimes I_3)\tilde{\eta}_{0}(t)$$ (23) 由 (22) 可推出
$$ \dot{L}(t)=-\kappa_1L^{\iota_1}(t)-\kappa_2L^{\iota_2}(t) $$ (24) 式中, $ \iota_1 = \frac{1+m_1}{2},\; \iota_2 = \frac{1+m_2}{2},\; \kappa_1 = c_1(2\lambda_{\min}({\cal{\tilde{L}}} + {\cal{B}}))^{\iota_1},\; \kappa_2=c_2(2\lambda_{\min}({\cal{\tilde{L}}}+{\cal{B}}))^{\iota_2}(3N)^{1-\iota_2} $. 根据引理1可知, $ \tilde{\eta}_{0}(t) $固定时间收敛到零, 收敛时间 $ T_{\eta} $满足$ T_{\eta}\leq \frac{1}{\kappa_1(1-\iota_1)}+\frac{1}{\kappa_2(\iota_2-1)} $. 因此, 存在时刻$ \tilde{t}\geq T_{\eta} $有$ \tilde{\eta}_{0}(t)= {\bf{0}},\; \forall t\geq \tilde{t} $.
□ 注 4. 在实际情形下, 无人艇系统状态信号$ \eta_i(t),\; $$ \eta_0(t) $是有界的; 根据假设2, 信号$ \dot{\eta}_0(t) $也是有界的. 因此, 根据 (5) 可推出$ \epsilon_{i1}(t) $是有界的. 此外, 根据引理3可知, $ \eta_{0i}(t) $是有界的. 综上, 由 (9) 可推断出$ \alpha_i(t) $是有界的. 注意, 如果$ \alpha_i(t) $是有界的, 那么$ \tilde{\alpha}_i(t) $是有界的. 在此情况下, 存在常数$ \check{\alpha}_i>0 $使得$ \Vert\tilde{\alpha}_i(t)\Vert\leq\check{\alpha}_i $.
定理1给出了本文的稳定性结果.
定理 1. 在假设1和假设2满足时, 多无人艇系统 (3) ~ (4) 在控制协议 (14) 和参数自适应律 (20) 的驱动下可以实现实用固定时间二分编队跟踪控制, 收敛时间$ T_{{\cal{P}}} $满足$ T_{{\cal{P}}}\leq\max_{i\in{\cal{I}}}\;\{\;\tilde{t},\;p_i\;\}\ + \frac{1}{\bar{\kappa}_1c(1-\bar{\iota}_1)}+\frac{1}{\bar{\kappa}_2c(\bar{\iota}_2-1)} $.
证明. 选择如下的 Lyapunov 函数$ V(t)= V_{1}(t) + \; V_{2}(t) $. 根据 (12) 和 (21), 对于$ t\;\geq\; \max_{i\in{\cal{I}}} \{\tilde{t}, p_i\}, \nu_i\geq o_i $ 有
$$ \begin{split} \dot{V}(t) \leq\;&\ \epsilon_{1}^{\rm T}(t)\tilde{\alpha}(t) -\sum\limits_{l=1}^2c_l\epsilon_{1}^{\rm T}(t){\rm sig}\{\epsilon_{1}(t)\}^{m_l}\ -\\ & \epsilon_{1}^{\rm T}(t){\rm diag}\left\{\nu_i\otimes I_3\right\}\epsilon_{1}(t) +\sum\limits_{i=1}^N\bar{\eta}_0\rho_i(t)\ -\\ & \sum_{l=1}^2c_l\epsilon_{2}^{\rm T}(t){\rm sig}\{\epsilon_{2}(t)\}^{m_l}\ -\\ & \sum_{l=1}^2c_l{\cal{P}}^{\rm T}(t){\rm sig}\{{\cal{P}}(t)\}^{m_l}\leq\\ & -\sum_{l=1}^2c_l\epsilon_{{\cal{P}}}^{\rm T}(t){\rm sig}\{\epsilon_{{\cal{P}}}(t)\}^{m_l}+\iota \end{split} $$ 式中, $ \epsilon_{{\cal{P}}}(t) = (\epsilon_{1}^{\rm T}(t),\;\epsilon_{2}^{\rm T}(t),\; {\cal{P}}^{\rm T}(t))^{\rm T} $, $ \iota = \sum\nolimits_{i=1}^N\frac{1}{4o_i}\check{\alpha}_i^2 + \; \sum\nolimits_{i=1}^N\bar{\eta}_0\bar{\rho}_i $, $ o_i>0 $是合适的常参数, 通过选取$ o_i $和$ \rho_i(t) $可以使残差集任意小. 因为对于$ t\;\geq \;\max _{i\in{\cal{I}}} \{\tilde{t}, p_i\} $有
$$ \zeta_1\epsilon_{{\cal{P}}}^{\rm T}(t)\epsilon_{{\cal{P}}}(t)\leq V(t) \leq\zeta_2\epsilon_{{\cal{P}}}^{\rm T}(t)\epsilon_{{\cal{P}}}(t) $$ 式中, $ \zeta_1=\min\limits_{i\in{\cal{I}}}\left\{\frac{1}{2},\;\frac{1}{2\lambda_{\min}\left(\Lambda_{i}^{\mathrm{T}}(t)\Gamma_i\Lambda_{i}(t)\right)},\;\frac{1}{2\lambda_{\max}\left({\cal{L}}+{\cal{B}}\right)}\right\},\; $ $ \zeta_2=\min\limits_{i\in{\cal{I}}}\left\{\frac{1}{2},\;\frac{1}{2\lambda_{\max}\left(\Lambda_{i}^{\mathrm{T}}(t)\Gamma_i\Lambda_{i}(t)\right)},\;\frac{1}{2\lambda_{\min}\left({\cal{L}}+{\cal{B}}\right)}\right\} $. 因此, 根据引理2可以推断出
$$ \begin{split} &-c_1\epsilon_{{\cal{P}}}^{\rm T}(t){\rm sig}\{\epsilon_{{\cal{P}}}(t)\}^{m_1} \leq -\bar{\kappa}_1V^{\bar{\iota}_1}(t)\\ & -c_2\epsilon_{{\cal{P}}}^{\rm T}(t){\rm sig}\{\epsilon_{{\cal{P}}}(t)\}^{m_2} \leq -\bar{\kappa}_2V^{\bar{\iota}_2}(t) \end{split} $$ 式中, $ \bar{\iota}_1 = \frac{m_1+1}{2},\; \bar{\kappa}_1=c_1\left(\frac{1}{\zeta_2}\right)^{\bar{\iota}_1},\; \bar{\iota}_2 = \frac{m_2+1}{2} $ 和$ \bar{\kappa}_2= c_2((6+m)N)^{1-\bar{\iota}_2}\left(\frac{1}{\zeta_2}\right)^{\bar{\iota}_2} $. 进一步有
$$ \dot{V}(t) \leq -\sum_{l=1}^2\bar{\kappa}_lV^{\bar{\iota}_l}(t)+\iota,\;\quad t\geq \max\limits_{i\in{\cal{I}}}\{\tilde{t},\;p_i\} $$ 根据引理1可知, 误差向量$ \epsilon_1(t),\; \epsilon_2(t),\; {\cal{P}}(t) $固定时间收敛到原点的任意小邻域, 收敛时间$ T_{{\cal{P}}} $满足$ T_{{\cal{P}}}\leq\max_{i\in{\cal{I}}}\{\tilde{t},\;p_i\}+\frac{1}{\bar{\kappa}_1c(1-\bar{\iota}_1)}+\frac{1}{\bar{\kappa}_2c(\bar{\iota}_2-1)} $. 根据 (19), 当$ t\geq \max_{i\in{\cal{I}}}\{\tilde{t},\;p_i\} $时, 有$ {\cal{P}}_i(t)=\Lambda_i(p_i)\tilde{\Theta}_i(t) $且$ \Lambda_i(p_i) $可逆. 因此, 参数估计误差$ \tilde{\Theta}_i(t),\; i\in{\cal{I}} $也固定时间收敛到原点的任意小邻域. 综上, 多无人艇系统 (3) ~ (4) 在控制协议 (14) 和参数自适应律 (20) 的驱动下可以实现实用固定时间二分编队跟踪控制.
□ 注 5. 根据定理1可知, 所设计的控制器不仅能使得误差信号$ \epsilon_{i1}(t),\; \epsilon_{i2}(t),\; i\in{\cal{I}} $ 固定时间收敛到原点的任意小邻域, 而且能使得参数估计误差$ \tilde{\Theta}_i(t) $ 收敛到零的任意小邻域.
注 6. 根据 (18) 可知, 通过引入滤波信号$ q_{i}^{f}(t)$, $ H_{i}^{f}(t) $, $ \Phi_{i}^{f}(t) $ 和辅助变量$ \Lambda_i(t) $, $ \Upsilon_i(t) $, 并联立 (4) 可以推导出$ \Theta_{i} $ 与$ \Lambda_{i}(t),\; \Upsilon_{i}(t) $ 的关系. 进一步地, 可以构建包含$ \tilde{\Theta}_i(t) $ 的参数更新律 (20). 此外, 由定理1的证明过程可知, 当参数更新律设计为 (20) 且信号$ \Lambda_{i}(t) $ 满足较弱的 IE 条件时, 参数估计误差的收敛性可以确保.
3. 仿真实验
本节给出一个仿真实例以验证提出的控制协议的可行性. 考虑一个无人艇二分编队集群, 包含$ 7 $ 艘跟随无人艇和$ 1 $ 艘领航无人艇. 无人艇间的通信互动在图2中描述, 且$ E={\rm diag}\{1,\;1,\;-1,\; -1,\;-1,\; 1,\;-1\} $. 期望编队构型如下所示:
$$ \begin{split} &h_{1}=(1,\;1,\;0)^{\rm T},\;\ \ \qquad h_{2}=(3,\;1,\;0)^{\rm T},\;\\ & h_{3}=(-1,\;-1,\;0)^{\rm T},\;\quad h_{4}=(-3,\;-1,\;0)^{\rm T},\;\\ & h_{5}=(-3,\;-3,\;0)^{\rm T},\;\quad h_{6}=(2,\;3,\;0)^{\rm T},\;\\ & h_{7}=(-1,\;-3,\;0)^{\rm T} \end{split} $$ 跟随无人艇$ i,\; i=1,\;2,\;\cdots,\;7 $的动力学信息如下所示:
$$ \begin{split} &M_i= \left[\begin{array}{ccc} 26&0&0\\ 0&34&1.1\\ 0&1.1&2.8 \end{array}\right]\\& f_i(v_i(t))=-C_i(v_i(t))-D_i(v_i(t)) \end{split} $$ 式中,
$$ C_i(v_i(t))= \left[\begin{array}{c} C_i^{1}(v_i(t))u_i^3(t)\\ C_i^{2}(v_i(t))u_i^3(t)\\ -C_i^{1}(v_i(t))u_i^1(t)-C_i^{2}(v_i(t))u_i^2(t) \end{array} \right]$$ $$ D_i(v_i(t))= \left[\begin{array}{c} D_i^1(v_i(t))u_i^1(t)\\ D_i^2(v_i(t))u_i^2(t)+D_i^3(v_i(t))u_i^3(t)\\ D_i^4(v_i(t))u_i^2(t)+D_i^5(v_i(t))u_i^3(t) \end{array}\right] $$ $$ C_i^{1}(v_i(t))=-34u_i^2(t)-1.1u_i^3(t) $$ $$ C_i^{2}(v_i(t))=26u_i^1(t)$$ $$ D_i^{1}(v_i(t))=0.73+1.33|u_i^1(t)|+5.87(u_i^1(t))^2 $$ $$ D_i^{2}(v_i(t))=0.86+36.3|u_i^2(t)|+8.1|u_i^3(t)| $$ $$ D_i^{3}(v_i(t))=-0.11+0.85|u_i^2(t)|+3.5|u_i^3(t)| $$ $$ D_i^{4}(v_i(t))=-0.11-5.1|u_i^2(t)|-0.13|u_i^3(t)| $$ $$ D_i^{5}(v_i(t))=-1.9-0.1|u_i^2(t)|+0.75|u^3_i(t)| $$ 未知参数设置为$ \Theta_1=(1,\; 1.5,\; 5)^{\rm T},\; \Theta_2=(2.5,\; 3 ,$ $3.5)^{\rm T},\; \Theta_3\;=\;(0.5,\; 1.0,\; 8)^{\rm T},\; $ $ \Theta_4\;=\;(3.7,\; $ $ 3.7,\; $ $ 6)^{\rm T}, $ $ \Theta_5\;=\;-(0.7,\; $ $ 0.8,\; $ $ 5)^{\rm T},\; $ $ \Theta_6\;=\;-(1.1,\; $ $ 2.1,\; $ $ 7)^{\rm T} $和$ \Theta_7\;=\;-(2,\; $ $ 3,\; $ $ 6)^{\rm T} $. 已知函数选取为$ \phi_{i}\;(v_i\;(t))= \begin{pmatrix}\phi_{i}^{1}(v_i(t))& 0 &\phi_{i}^{2}(v_i(t))\\ 0& \phi_{i}^{3}(v_i(t)) &0\\ 0& 0 &\phi_{i}^{4}(v_i(t))\end{pmatrix}. $ 式中, $ \phi_{i}^{1}(v_i(t))= $ $\sin(u_i^1(t))\cos(1.5u_i^2(t)) + 2 $, $ \phi_{i}^{2}(v_i(t)) = ||\sin^{\rm T}(v_i(t))\;\times $$ \sin(v_i(t))|| $, $ \phi_{i}^{3}(v_i(t)) $ $ =\,\sin(2u_i^2(t))\cos(u_i^3(t))+2 $ 和$ \phi_{i}^{4}(v_i(t))= $ $ \sin(0.2u_i^1(t))\cos(0.2u_i^3(t))+2 $.
领航无人艇参考轨迹如下:
$$ \eta_0(t)= \left[\begin{array}{c} 3\sin(0.025\pi t)\\ 2\sin(0.05\pi t)\\ \pi\cos(0.02\pi t) \end{array}\right]$$ 无人艇系统状态初始值设置为$ \eta_1(0)\,=\,5(-1, -2.1,\;1.3)^{\rm T} $, $ v_1(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_2(0)\,=\,0.1(-1, -2.1,\;1.3)^{\rm T} $, $ v_2(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_3(0)\,=\,(-1, -2.1,\;1.3)^{\rm T} $, $ v_3(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_4(0) $ $ =\;(-1, -2.1,\;1.3)^{\rm T} $, $ v_4(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_5(0)\,=\,(-1, -2.1,\; 1.3)^{\rm T} $, $ v_5(0)\,=\,3(1,\;2,\;-1.3)^{\rm T} $, $ \eta_6(0)\,=\,10(-1, -2.1,\;1.3)^{\rm T} $, $ v_6(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_7(0)\,=\,(-1, -2.1,\;1.3)^{\rm T} $ 和$ v_7(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $. 参数估计初值选取为$ \eta_{01}(t)=4 $, $ \eta_{02}(t)=5 $, $ \eta_{03}(t)\,=\,6 $, $ \eta_{04}(t)\,=\, 7 $, $ \eta_{05}(t)\,=\,8 $, $ \eta_{06}(t)\,=\,9 $, $ \eta_{07}(t)\,=\,10 $, $ \hat{\Theta}_1(0)\,=\,(6, $ $ 6 $, $ 9)^{\rm T} $, $ \hat{\Theta}_2(0)\,=\,(7.5 $, $ 13.5 $, $ 7.5)^{\rm T} $, $ \hat{\Theta}_3(0)\,=\, (9.9 $, $ 5.1 $, $ 6.9)^{\rm T} $, $ \hat{\Theta}_4(0)\;=\;3(-4.1 $, $ -2.2 $, $ -3.7)^{\rm T} $, $ \hat{\Theta}_5(0)\,=\, 3(-3.5 $, $ 2.7 $, $ 0.7)^{\rm T} $, $ \hat{\Theta}_6(0)\,=\,3(7.1 $, $ 5 $, $ -1.7)^{\rm T} $ 和$ \hat{\Theta}_7(0)\,=\,3(1.3 $, $ 7.2 $, $ 1.7)^{\rm T} $. 命令滤波对应量的初始值设置为$ \bar{\alpha}_i(0)\,=\,i(0.5,\;1,\;0.75)^{\rm T} $. 控制器参数选取为$ c_1=c_2=10,\; m_1=0.5,\; m_2 = 1.5,\; w_i=1.6,\; k_{i1}= k_{i2}=25 $ 和$ \beta_i=0.1 $.
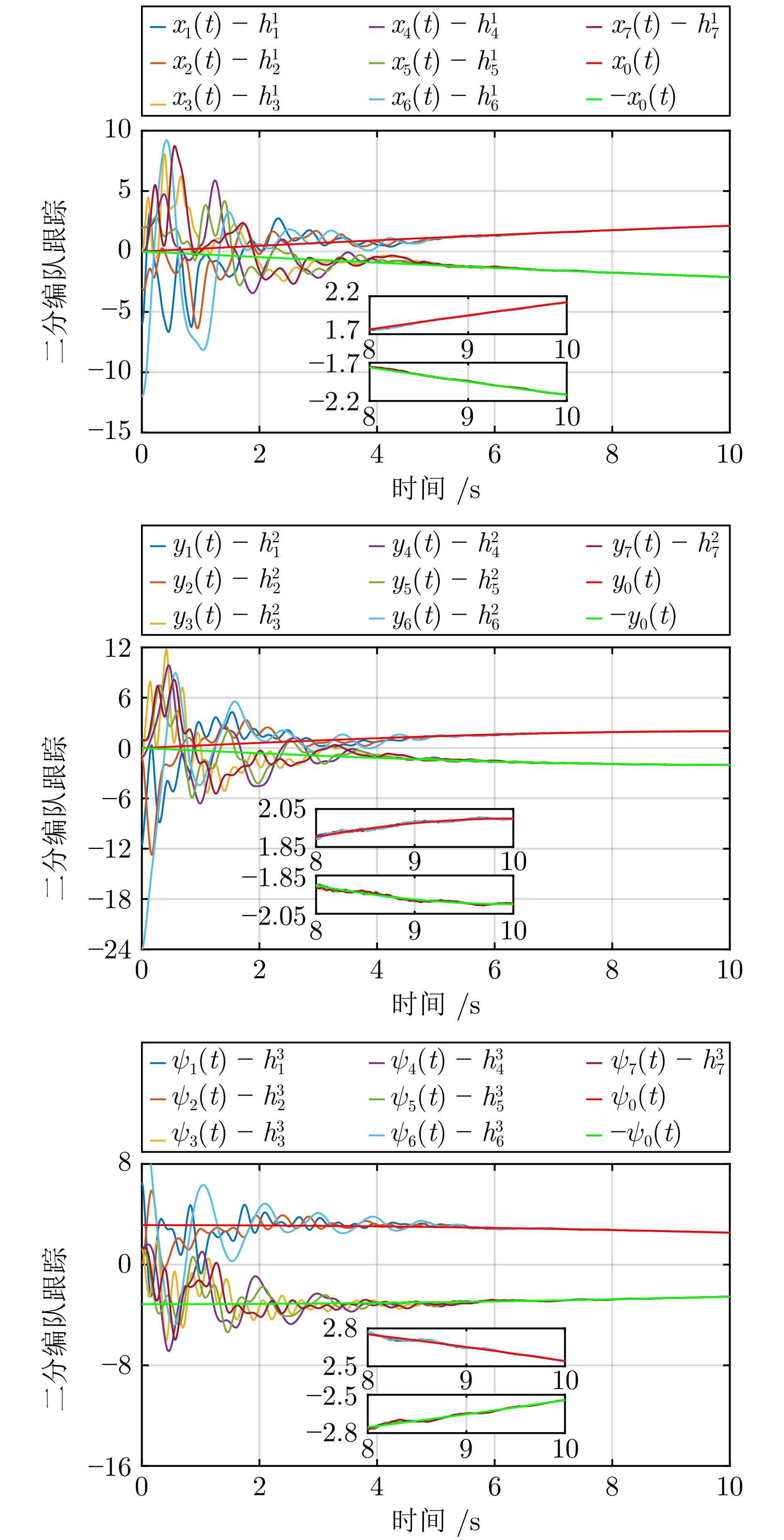
记$ \epsilon_{i1}(t) = (\epsilon_{i1}^1(t),\,\epsilon_{i1}^2(t),\,\epsilon_{i1}^3(t))^{\rm T}, $ $ \epsilon_{i2}(t) = $ $ (\epsilon_{i2}^1(t),\, \epsilon_{i2}^2(t),\,\epsilon_{i2}^3(t))^{\rm T}, $ $ \Theta_i = (\Theta_i^1,\,\Theta_i^2,\,\Theta_i^3)^{\rm T} $ 和$ \hat{\Theta}_i\,(t) = $ $(\hat{\Theta}_i^1(t), \hat{\Theta}_i^2(t) $, $ \hat{\Theta}_i^3(t))^{\rm T} $. 参数估计误差轨迹分别在图3和图4中描述. 观察图3和图4可知, 参数估计误差信号$ \tilde{\eta}_{0i}(t),\, i = 1,\,2,\,\cdots,\,7 $ 在 2 ($ 2 < \frac{1}{\kappa_1(1-\iota_1)} + \frac{1}{\kappa_2(\iota_2-1)} = 17.73 $) s内收敛到零; 参数估计误差信号$ \tilde{\Theta}_{i}(t), i=1,\;2,\;\cdots,\;7 $ 在 4 ($ 4 < \frac{1}{\bar{\kappa}_1c(1-\bar{\iota}_1)} + \frac{1}{\bar{\kappa}_2c(\bar{\iota}_2-1)} > 26.1 $) s内收敛到零的小邻域. 局部跟踪误差轨迹$ \epsilon_{i1}(t), \epsilon_{i2}(t),\; i=1,\;2,\;\cdots,\;7 $ 在图5中给出, 它们在5 ($ 5< 26.1 $) s内收敛到零的小邻域. 图6揭示了在提出的控制协议下, 多无人艇系统可实现固定时间二分编队跟踪控制.
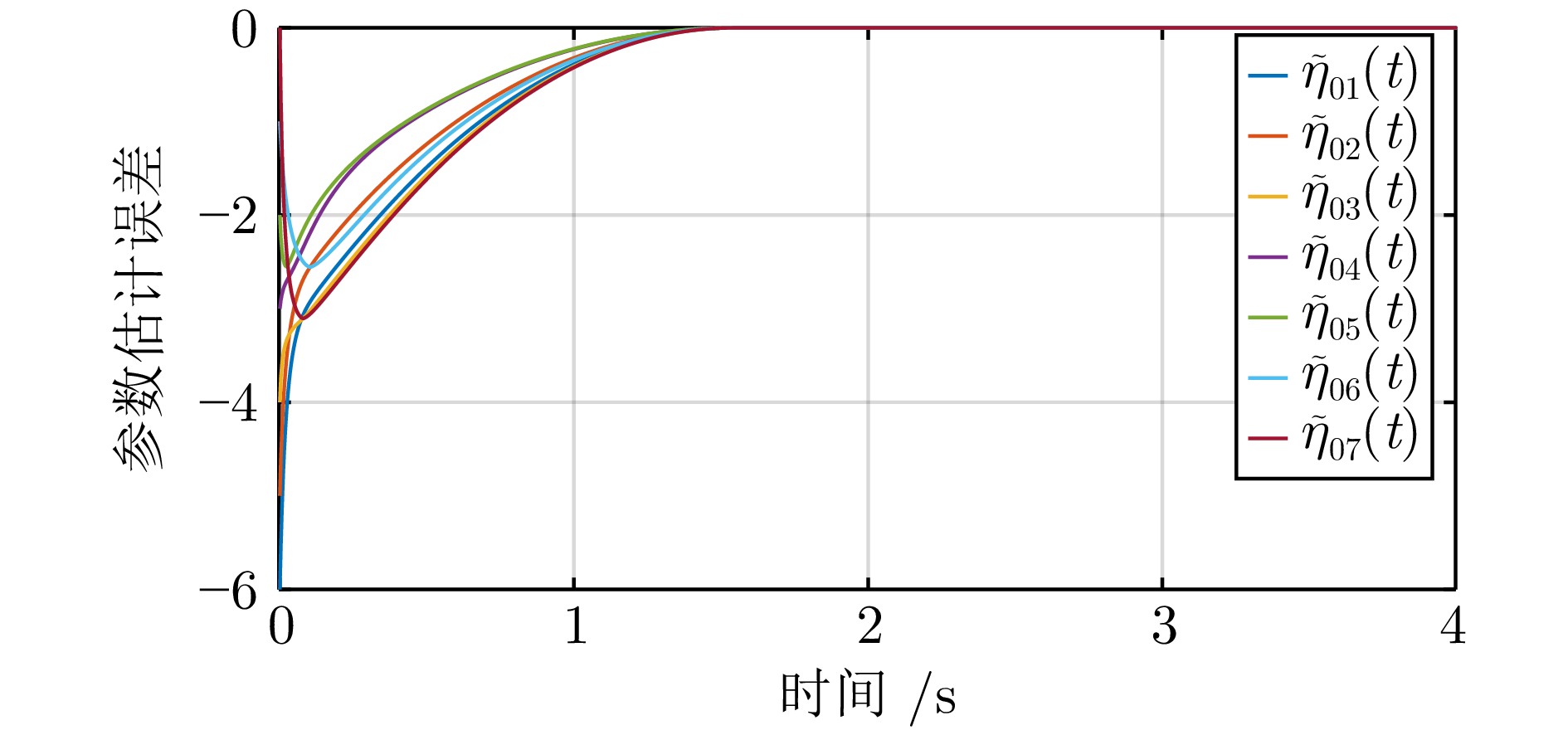 图 3 参数估计误差 $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 3 Parameter estimation errors $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$
图 3 参数估计误差 $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 3 Parameter estimation errors $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$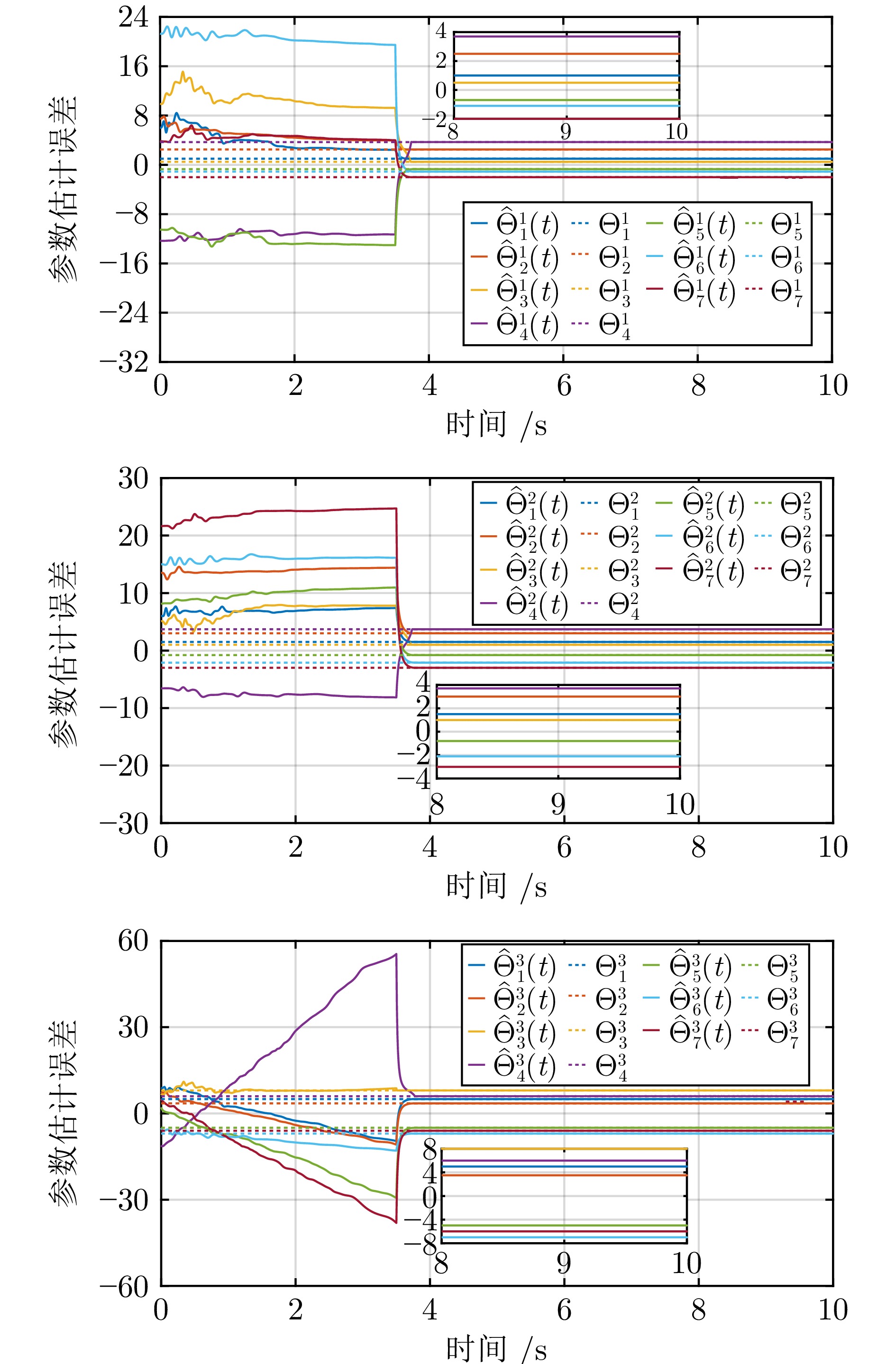 图 4 参数估计误差$\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 4 Parameter estimation errors $\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$
图 4 参数估计误差$\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 4 Parameter estimation errors $\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$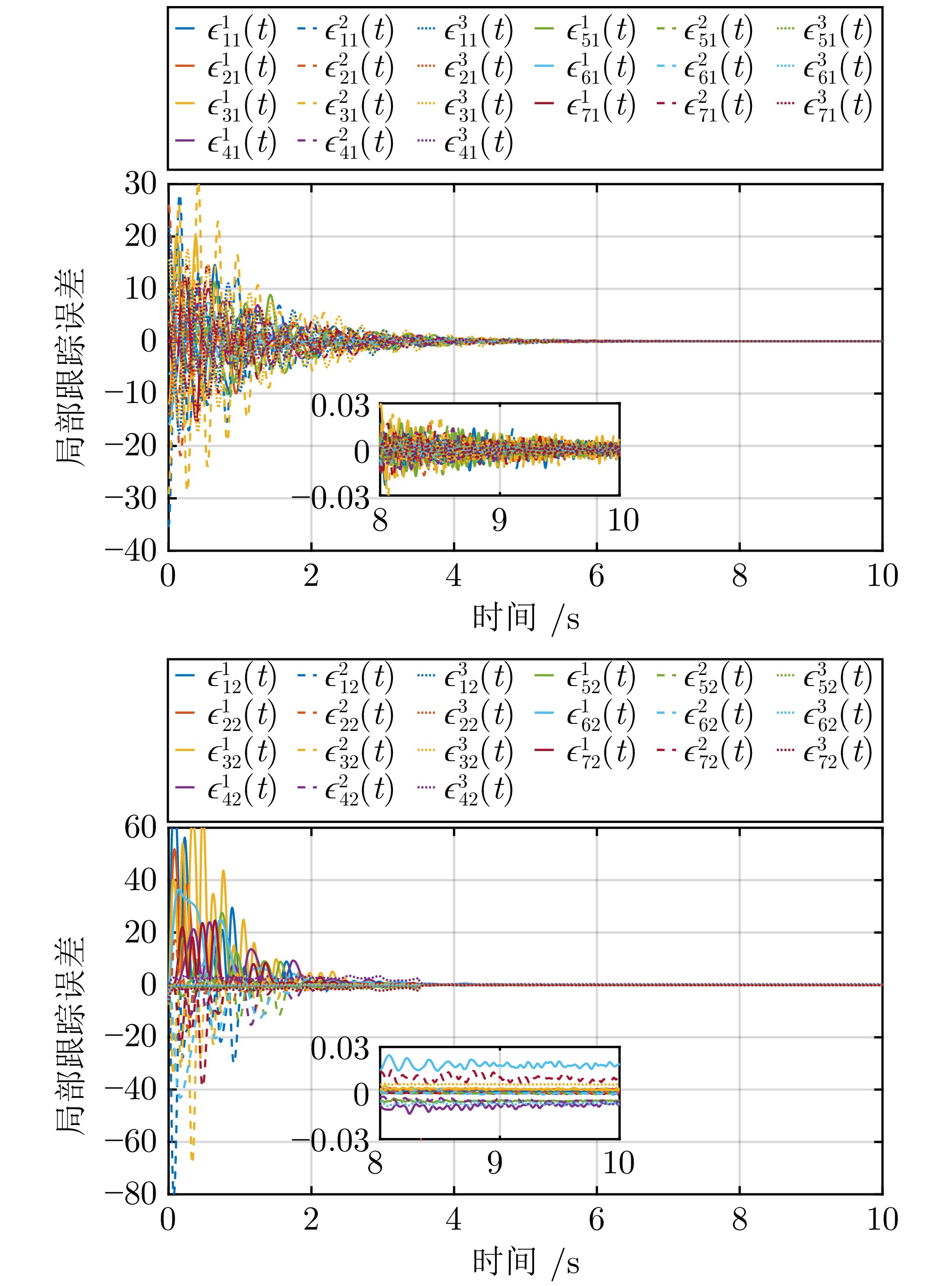 图 5 局部跟踪误差$\epsilon_{i1}(t),\; \epsilon_{i2}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 5 Local tracking errors $\epsilon_{i1}(t),\;$ $\epsilon_{i2}(t),\;$ $i=1,\;2,\;\cdots,\;7$
图 5 局部跟踪误差$\epsilon_{i1}(t),\; \epsilon_{i2}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 5 Local tracking errors $\epsilon_{i1}(t),\;$ $\epsilon_{i2}(t),\;$ $i=1,\;2,\;\cdots,\;7$4. 结束语
通过设计基于命令滤波与复合学习的反推控制协议, 解决了模型参数不确定下多无人艇系统的固定时间二分编队跟踪控制问题. 与已有的相关工作相比, 本文具有以下优势: 通过引入命令滤波技术, 提出的控制协议避免了计算虚拟控制输入的导数, 极大地简化了分布式控制器的设计; 通过引入复合学习技术, 在不需要 PE 条件的情况下, 保证了跟踪误差和参数估计误差的固定时间收敛性. 未来主要关注有向符号图下具有时变参数不确定性影响的多无人艇系统固定时间分布式控制问题, 以及多无人机−无人艇跨域协同控制问题.
-

图 6 DEA动力学模型输出值与实验测量值的对比
Fig. 6 Comparison between output of dynamic model of DEA and experimental measurement

图 7 在不同驱动电压幅值情况下的模型验证结果
Fig. 7 Model validation results in different actuation voltage amplitudes

图 8 在不同驱动电压频率情况下的模型验证结果
Fig. 8 Model validation results in different actuation voltage frequencies
表 1 第1个实验方案中所有实验的相对均方根误差
Table 1 $E_R$ for all experiments of the first experimental scheme
$m$ $a_m$ (kV) $E_R$ (%) 1 5.0 3.12 2 6.0 1.53 3 7.0 1.55 4 8.0 2.16  下载: 导出CSV
下载: 导出CSV
表 2 第2个实验方案中所有实验的相对均方根误差
Table 2 $E_R$ for all experiments of the second experimental scheme
$m$ ${\psi}_m$ (Hz) $E_R$ (%) 1 0.2 1.82 2 0.6 2.10 3 1.0 2.50 4 1.4 1.89
下载: 导出CSV
表 3 ${{N}_{p}}$和${{N}_{c}}$取值对控制精度、单步运行时间和实时性的影响
Table 3 Influences of values of ${{N}_{p}}$ and ${{N}_{c}}$ on control accuracy, single-step running time and real-time performance
${{N}_{p}}$ ${{N}_{c}}$ $E_R$ (%) $T_c$ (s) 实时性 2 1 3.26 $5.08\times {10^{ - 3}}$ 满足 4 2 2.83 $8.39\times {10^{ - 3}}$ 满足 5 2 1.88 $8.91\times {10^{ - 3}}$ 满足 6 4 — $1.85\times {10^{ - 2}}$ 不满足
下载: 导出CSV
-
[1] Rus D, Tolley M T. Design, fabrication and control of soft robots. Nature, 2015, 521(7553): 467−475 doi: 10.1038/nature14543 [2] 文力, 王贺升. 软体机器人研究展望: 结构、驱动与控制. 机器人, 2018, 40(5): 577Wen Li, Wang He-Sheng. Prospects for soft robotics research: Structure, actuation and control. Robot, 2018, 40(5): 577 [3] 徐璠, 王贺升. 软体机械臂水下自适应鲁棒视觉伺服. 自动化学报, 2023, 49(4): 744−753Xu Fan, Wang He-Sheng. Adaptive robust visual servoing control of a soft manipulator in underwater environment. Acta Automatica Sinica, 2023, 49(4): 744−753 [4] Naclerio N D, Karsai A, Murray-Cooper M, Ozkan-Aydin Y, Aydin E, Goldman D I, et al. Controlling subterranean forces enables a fast, steerable, burrowing soft robot. Science Robotics, 2021, 6(55): Article No. eabe2922 doi: 10.1126/scirobotics.abe2922 [5] 王成军, 邓海龙. 软体机器人在康复训练领域的应用. 机械传动, 2024, 48(5): 169−176Wang Cheng-Jun, Deng Hai-Long. Application of soft robots in rehabilitation training. Journal of Mechanical Transmission, 2024, 48(5): 169−176 [6] 李兴旺, 滕燕, 徐迎. 一种基于双稳态驱动器的气动软体四足机器人. 机器人, 2024, 46(3): 294−304Li Xing-Wang, Teng Yan, Xu Ying. A pneumatic soft quadruped robot based on a bistable actuator. Robot, 2024, 46(3): 294−304 [7] Wu J D, Ye W J, Wang Y W, Su C Y. Modeling based on a two-step parameter identification strategy for liquid crystal elastomer actuator considering dynamic phase transition process. IEEE Transactions on Cybernetics, 2023, 53(7): 4423−4434 doi: 10.1109/TCYB.2022.3179433 [8] Pelrine R, Kornbluh R, Pei Q B, Joseph J. High-speed electrically actuated elastomers with strain greater than 100%. Science, 2000, 287(5454): 836−839 doi: 10.1126/science.287.5454.836 [9] 李智, 陈国强, 徐泓智, 陈新开, 陕晋军, 张秀宇. 介电弹性体驱动系统建模及控制方法综述. 控制与决策, 2023, 38(8): 2283−2300Li Zhi, Chen Guo-Qiang, Xu Hong-Zhi, Chen Xin-Kai, Shan Jin-Jun, Zhang Xiu-Yu. A review of modeling and control methods for dielectric elastomer actuator systems. Control and Decision, 2023, 38(8): 2283−2300 [10] Chen Y F, Zhao H C, Mao J, Chirarattananon P, Helbling E F, Hyun N P, et al. Controlled flight of a microrobot powered by soft artificial muscles. Nature, 2019, 575(7782): 324−329 doi: 10.1038/s41586-019-1737-7 [11] Gu G Y, Zou J, Zhao R K, Zhao X H, Zhu X Y. Soft wall-climbing robots. Science Robotics, 2018, 3(25): Article No. eaat2874 doi: 10.1126/scirobotics.aat2874 [12] Li G R, Chen X P, Zhou F H, Liang Y M, Xiao Y H, Cao X N, et al. Self-powered soft robot in the Mariana Trench. Nature, 2021, 591(7848): 66−71 doi: 10.1038/s41586-020-03153-z [13] Zhang Y, Wu J D, Meng Q X, Wang Y W, Su C Y. Robust control of dielectric elastomer smart actuator for tracking high-frequency trajectory. IEEE Transactions on Industrial Informatics, 2024, 20(1): 224−234 doi: 10.1109/TII.2023.3258445 [14] Huang P, Wu J D, Zhang P, Wang Y W, Su C Y. Dynamic modeling and tracking control for dielectric elastomer actuator with a model predictive controller. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1819−1828 doi: 10.1109/TIE.2021.3063976 [15] Suo Z G. Theory of dielectric elastomers. Acta Mechanica Solida Sinica, 2010, 23(6): 549−578 doi: 10.1016/S0894-9166(11)60004-9 [16] Xiao H, Wu J D, Ye W J, Wang Y W. Dynamic modeling of dielectric elastomer actuators based on thermodynamic theory. Mechanics of Advanced Materials and Structures, 2022, 29(11): 1543−1552 doi: 10.1080/15376494.2020.1829757 [17] Huang P, Ye W J, Wang Y W. Dynamic modeling of dielectric elastomer actuator with conical shape. Plos One, 2020, 15(8): Article No. e0235229 doi: 10.1371/journal.pone.0235229 [18] Zou J, Gu G Y. High-precision tracking control of a soft dielectric elastomer actuator with inverse viscoelastic hysteresis compensation. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 36−44 doi: 10.1109/TMECH.2018.2873620 [19] Wang H C, Fu T F, Du Y Q, Gao W H, Huang K X, Liu Z M, et al. Scientific discovery in the age of artificial intelligence. Nature, 2023, 620(7972): 47−60 doi: 10.1038/s41586-023-06221-2 [20] Linot A J, Burby J W, Tang Q, Balaprakash P, Graham M D, Maulik R. Stabilized neural ordinary differential equations for long-time forecasting of dynamical systems. Journal of Computational Physics, 2023, 474: Article No. 111838 doi: 10.1016/j.jcp.2022.111838 [21] Hornik K, Stinchcombe M, White H. Universal approximation of an unknown mapping and its derivatives using multilayer feedforward networks. Neural Networks, 1990, 3(5): 551−560 doi: 10.1016/0893-6080(90)90005-6 [22] Gupta U, Wang Y Z, Ren H L, Zhu J. Dynamic modeling and feedforward control of jaw movements driven by viscoelastic artificial muscles. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 25−35 doi: 10.1109/TMECH.2018.2875521 [23] Wang Y W, Huang P, Wu J D, Su C Y. Modelling and compound control of intelligently dielectric elastomer actuator. Control Engineering Practice, 2022, 126: Article No. 105261 doi: 10.1016/j.conengprac.2022.105261 [24] Lu F, Lin K K, Chorin A J. Comparison of continuous and discrete-time data-based modeling for hypoelliptic systems. Communications in Applied Mathematics and Computational Science, 2016, 11(2): 187−216 doi: 10.2140/camcos.2016.11.187 [25] 陈虹. 模型预测控制. 北京: 科学出版社, 2013. 245−251Chen Hong. Model Predictive Control. Beijing: Science Press, 2013. 245−251 [26] 席裕庚, 李德伟, 林姝. 模型预测控制——现状与挑战. 自动化学报, 2013, 39(3): 222−236 doi: 10.1016/S1874-1029(13)60024-5Xi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control——Status and challenges. Acta Automatica Sinica, 2013, 39(3): 222−236 doi: 10.1016/S1874-1029(13)60024-5 [27] 章越. 介电弹性体驱动器动力学建模与轨迹跟踪控制 [硕士学位论文], 中国地质大学, 2023.Zhang Yue. Dynamic Modeling and Trajectory Tracking Control of Dielectric Elastomer Actuator [Master thesis], China University of Geosciences, China, 2023. [28] Zhang X Y, Xu H Z, Chen X K, Li Z, Su C Y. Modeling and adaptive output feedback control of butterfly-like hysteretic nonlinear systems with creep and their applications. IEEE Transactions on Industrial Electronics, 2023, 70(5): 5182−5191 doi: 10.1109/TIE.2022.3187583 期刊类型引用(2)
1. 王建国,李建国. 铁路危险货物运输智能检测及应急处置装置设计. 铁路物流. 2025(02): 27-33 .  百度学术
百度学术2. 相洪涛,张文文,肖文鑫,王磊,王远西. 仿生嗅觉感知系统气体识别和浓度估计模型. 自动化学报. 2024(04): 812-827 . 本站查看其他类型引用(5)
-

 下载:
下载:










计量
- 文章访问数: 403
- HTML全文浏览量: 174
- PDF下载量: 91
- 被引次数: 7
