

The Key Technology and Application of Multi-modal Fine Robot Inspection for Power Facilities
-
摘要: 电力设施巡检对于加快电网基础设施智能化改造和智能微电网建设, 提高电力系统互补互济和智能调节能力的需求具有重要作用. 近年来, 智能巡检机器人开始在电力巡检中广泛应用, 在提高电力设施巡检效率和准确性、提升安全性、降低成本和促进电力智能化发展等方面发挥关键作用. 本文从电力巡检机器人的智能感知和导航技术出发, 重点介绍目标检测、语义分割、自主导航等共性关键技术的国内外发展现状. 然后以可见光红外双光融合、可见光图像和点云数据融合、声纹和可见光融合为例, 阐述电力场景多模态数据融合方式. 并进一步介绍电力部件精准分割和异物检测、线路点云杆塔倾斜检测、输电线路覆冰多模态检测和电力架空线路缺陷分析及台账异常检测等电力设施多模态机器人相关案例. 最后探讨电力设施多模态精细化机器人巡检关键技术的发展趋势和所面临的挑战.Abstract: Power facilities inspection plays an important role in accelerating the intelligent transformation of power grid infrastructure and the construction of intelligent microgrid, and improving the complementary and intelligent adjustment ability of power system. In recent years, intelligent inspection robots have been widely used in power inspection. They play a key role in improving the efficiency and accuracy of power facilities inspection, improving safety, reducing costs and promoting the development of power intelligence. This paper starts from the intelligent perception and navigation technology of power inspection robots. This paper focuses on the development status of common key technologies such as target detection, semantic segmentation and autonomous navigation at home and abroad, and then takes visible light infrared dual-light fusion, visible light image and point cloud data fusion, voiceprint and visible light fusion as examples. This paper expounds the multi-modal data fusion method of power scene, and further introduces the related cases of multi-modal robots for power facilities, such as accurate segmentation and foreign body detection of power components, tilt detection of line point cloud towers, multi-modal detection of transmission line icing, defect analysis of power overhead lines and abnormal detection of ledgers, etc.. Finally, the development trend and challenges of key technologies for multi-modal fine robot inspection of power facilities are discussed.
-
Key words:
- Power facilities inspection /
- robots /
- intelligent perception /
- multi-modal /
- transmission lines
-
人工交通系统是利用人工社会的基本理论与方法, 通过抽取交通环境中单个个体或局部交通行为的基本属性或动态规律, 基于Agent建模技术, 通过交通系统个体或局部Agent之间相互作用, "涌现(Emergence)"出复杂的交通现象, 这是一个"自下而上"、基于"简单一致原则"人工"培育"出来的交通系统[1-3].人工交通系统可把"仿真"结果作为现实的一个替代版本, 而把实际系统也作为可能出现的现实中的一种, 与仿真结果等价[4-6].
霍兰指出: "涌现现象是以相互作用为中心的, 它比单个行为的简单累加要复杂得多"[7].对代理、环境及规则上描述的细微差别, 在涌现过程中, 就可能出现"差之毫厘, 谬以千里"的结果, 从而仿真结果失去了对现实的指导意义, 甚至给出完全错误的指导方案.正如社会学家Helmreich所批评的一样:人工社会的模型反映的是其创造者的潜意识中的文化假设和偏见[8].
如何避免这一问题?在人工交通的建模及平行系统的研究中, 需要引入严密的量化评估体系, 建立系统"可信"或"可用"的数学描述, 并从多维度、多粒度的数据层面进行量化评估, 从理论上保证人工交通系统与现实交通系统在统计特性上、在动态演化规律上、在行为特性上的一致性.本文针对人工交通系统, 基于人工交通系统基本体系结构, 将二型模糊集合方法引入人工交通系统可信度评估中, 建立了一种适用于人工交通系统的可信度评估理论体系与具体评估方法.并利用一个"人工公交交通系统"模型, 进行了可信度评估的数据验证.
本文结构安排如下.第1节介绍了可信度研究的意义, 对可信度研究方法和成果进行了综述, 并提出了本文的可信度评估框架.第2节为可信度评估使用的核心算法介绍.第3节仿真验证.最后给出结论.
1. 可信度研究综述及评估体系
可信度定义:对于一个事物或现象为真的相信程度.可信度的量化值一般在[0, 1]之间, 值越大, 表示该事物越"真"[9].评估复杂仿真系统可信度的过程称为复杂仿真系统的可信度评估.通过开展复杂仿真系统的可信度评估研究和应用, 可以提高综合仿真系统的仿真结果的正确性, 降低其应用的风险保证仿真系统的质量.可信度评估在交通仿真、网络管理、信息管理、远程通讯以及导弹系统等各个领域都有广泛的应用[10-13].
文献[12]针对微观交通仿真模型开发者和使用者的不同需求, 研究了交通仿真模型可信度评价内容及其与仿真模型校正、校核、验证和确认的关系; 分析了三种可用于微观交通仿真模型可信度评价的方法:层次分析法、相似度法以及模糊综合评判.文献[14]使用模糊三角函数与层次分析法及网络层次分析法综合评价列车控制仿真系统的可信度, 获取定量的可信度结果.文献[15]在对当前城市交通导航系统的分析中发现, 许多共享交互的弱点会损害系统的可信度.论文提出了改进的交互机制, 以提高导航系统的可信度.在比较用户的研究中评估了所提议的机制, 并给出了确认其可信度的积极影响的结果.
从应用上分类, 可信度评估方法主要有仿真结果评估与VV & A (Verification, validation and accreditation)两种模式[16-18].基于仿真结果验证的方法主要是应用定性或定量评估方法, 并结合统计学的相关知识, 通过仿真结果与实际或预想结果的比较, 得出仿真可信度评价[16], 是交通仿真系统中主要使用的可信度评估模式.人工交通概念提出以来, 关于其建模方法及应用的研究成果较多, 但可可信度评估的研究相对较少[19]. Li等[20]在前期研究中, 建立了基于二型模糊集合方法的人工交通系统可信度评估体系.
因为一般现代综合评估方法存在: 1)因评价专家主观上的随机性和不一致性导致问题描述的混乱; 2)隶属度函数及权重难以精确确定; 3)简单的评价结果无法精确地反映评价结果与评价对象内在因素的多维关系等问题[21-22].同时考虑到人工交通系统不依赖精确数学模型、不确定性因素多、输入输出数据随机性强等特点, 本文应用二型模糊集理论, 利用其较强的处理不确定性及随机性的能力来对人工交通系统的可信度做具体的评估研究.建立了以区间二型模糊集合理论为核心数据处理算法的评估方法, 如图 1所示.评估方法的核心由三部分构成:数据处理、区间二型模糊集、Jaccard算法.
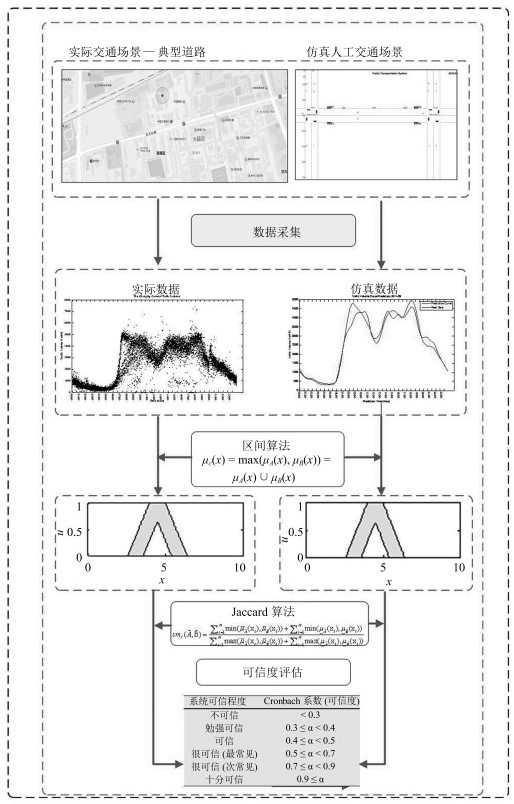 图 1 基于二型模糊集合理论的人工交通系统评估过程Fig. 1 Artificial traffic system assessment process based on type-2 fuzzy set theory
图 1 基于二型模糊集合理论的人工交通系统评估过程Fig. 1 Artificial traffic system assessment process based on type-2 fuzzy set theory该方法应用可信度概念, 描述将人工交通系统视为交通系统的现实版本的真实程度, 通过评估人工交通系统和实际交通系统输出数据的统计一致性程度, 来评估人工交通系统的可信度.即在一致输入条件下, 输出的统计特性一致.具体思路描述如下:
1) 将来自于实际交通场景的大量数据进行前期处理, 考虑到交通系统的非严格重复的周期性、随机性和不确定性, 基于置信区间概念, 将其处理为区间化数据:同理, 将相应的人工交通系统的输出数据也做同样的处理.
2) 区间化数据表达符合对开放复杂系统的输出数据不确定性和波动性的描述, 在剔除了噪声数据的同时, 也完成了二型模糊集建模的输入数据准备.
3) 应用区间二型模糊集合算法, 将处理后的区间输入进行深度加工, 得到更准确刻画系统特性的两个交通系统(实际交通系统和人工交通系统)的数据集合.
4) 基于Jaccard算法对二型模糊集输出数据集合进行一致性比较, 通过一致性结果数据, 评价人工交通系统的可信度.
上述评价方法, 有效地实现了基于Agent建模的复杂系统评估问题.该方法以系统数据为驱动, 不依赖于数学模型, 同时通过数据的波动性描述系统的不确定性特征:应用了二型模糊集处理带有噪声及不确定性数据的优越性能, 保证二次数据的精准性.
2. 核心算法
2.1 区间二型模糊集合
Zadeh[23]在1975年提出了二型模糊集合的概念, 二型模糊集合是传统模糊集合(称为一型模糊集合)的拓展.二型模糊集合由于隶属度本身是不确定的, 可以对不确定的数据进行确定描述, 在处理带有噪声及不确定性数据方面具有优越的性能[24], 这使它用于处理不确定性强、随机性强的交通流数据成为可能. 2017年, 二型模糊集合理论得到了进一步的修正[25].
定义 1. 设${C}(I)$是由单位区间$I$的全体非空闭子集构成的一个集合.论域$X$上的一个二型模糊集合$\omega $定义为
$ \omega = \ \{ {{( {x, u, z} )} |}\forall x\in X, \forall u \in {L_x} \in {C}( {{2^I}}) , \nonumber\\ \ {z = \mu _\omega ^2( {x, u} ) \in I} \} $
(1) 其中, $x$为主变量, $u$为次变量, $z$为第3变量, ${L_x}$为主隶属度, 由一个多值映射定义而得, 表示为
$ \mu _\omega ^1:\Omega \to {C}\left( {{2^I}} \right)\\ $
(2) $ x\mapsto L_x $
(3) 即$\forall x\in X$, 存在${L_x} \in {C}({{2^I}}) $, 使得$\mu _\omega ^1 (x) = L_x$.
称$\mu _\omega ^1 (x)$为主隶属度函数, 设$\mu _\omega ^2 (x)$为次隶属度函数, 定义为
$ \mu _\omega ^2:\bigcup\limits_{x \in X } {x \times {L_x}} \to I\notag \\x\times u \mapsto z $
(4) 次隶属度函数可以看成是一个以$\bigcup_{x \in X } {x \times {L_x}}$为论域上的一型模糊集合的隶属函数, 该定义称为二型模糊集合的二段式定义.
定义 2. 二型模糊集合$\omega$的支集为在$X\times I$中使次隶属度大于0的全体元素构成的集合, 记为$Supp(\omega)$, 即
$ Supp(\omega)=\left\{( {u, x})|\mu _\omega ^2 (x, u) >0 \right\} $
(5) 若$\mu _\omega ^2$为一个连续函数, 则由连续函数的性质, 可记$CoS(\omega)$为支集$Supp(\omega)$的闭包(Closure of support), 表示为
$ CoS(\omega) = \overline{\left\{( {x, u})|\mu _\omega ^2 (x, u) >0 \right\}} $
(6) 如果对$\forall x \in X$, $\forall u \in L_x$, 都有$\mu^2_\omega(x, u)=1$, 则称$\omega$为一个区间二型模糊集合.
2.2 交通数据的区间化方法
城市交通环境因其开放性、不确定性和随机性较强, 导致交通数据具有不确定性和随机性特征, 但同时, 城市交通环境作为一个大惯性系统, 其数据的非严格重复性又使其具有较好的统计特征.
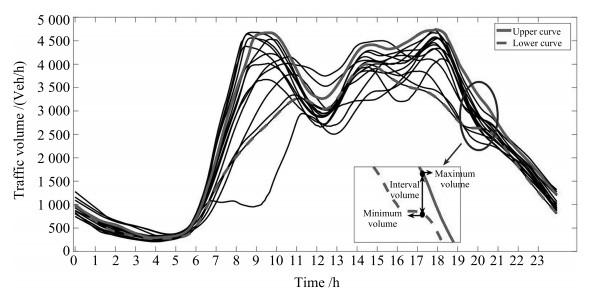
图 2以24小时交通流量数据为例, 刻画了多天交通流量的分布及区间化描述.在某一给定时刻, 区间的最大和最小值表明了该时刻交通流量可能的变化范围.
交通流量的区间化描述方式不仅能够给出交通流量丰富的分布信息, 并可以用构造内嵌一型模糊集合, 以作为二型模糊集的源数据.
本文引入置信区间的概念, 应用中心极限定理, 将交通流数据由点值数据转化为区间描述[26].
置信区间是指由样本统计量所构造的总体参数的估计区间:
设$\theta $是总体的一个参数, 该参数空间为$\Theta $, ${x_1}$, 是来自该总体的样本, $n$为样本量.对于给定的一个$\alpha$ $(0<\alpha<1)$, 若有两个统计量: ${\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\theta } _L}={\mathord{\buildrel{\lower3pt\hbox{}} \over\theta } _L}({x_1}, {x_2}, \cdots, {x_n})$和, 对任意的$\theta\in\Theta$, 有${P_\theta }({{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\theta } }_L}\le\theta\le {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\theta } }_H})\ge 1 - \alpha $.称随机区间为$\theta $的置信水平为$1-\alpha $的置信区间.
构造未知参数$\theta $的置信区间最常用的方法是轴枢量法.考虑到对于非正态分布的随机序列总体, 一般难以求出其总体的轴枢量, 因此利用中心极限定理将其近似分布转化为正态分布, 从而求得参数的置信区间估计[27].
勒维-林德伯格定理如下:
设${x_1}, {x_2}, \cdots, {x_n}$为相互独立同分布的随机序列, 且$E\left({{x_i}} \right) = \mu $, $D\left({{x_i}} \right) = {\sigma ^2} > 0$, $i = 1, 2, 3, \cdots, $则服从正态分布, 即.
针对这样一个正态分布, 可按照式(7)构造轴枢量
$ G = G\left( {{x_1}, {x_2}, \cdots , {x_n}, \mu } \right) = \frac{{\bar x - \mu }}{{\frac{\sigma }{\sqrt n} }} \sim \rm N \left( {0, 1}\right) $
(7) 经过不等式变形, 方差${\sigma ^2}$已知条件下, 期望$\mu $的置信区间为
$ \left( {\bar x - {\mu _{\frac{\alpha }{2}}}\frac{\sigma }{{\sqrt n }}, \bar x + {u_{\frac{\alpha }{2}}}\frac{\sigma }{{\sqrt n }}} \right) $
(8) 这是一个以样本均值$\overline x $为中心, 半径为${\mu _{\frac{\alpha }{2}}}\frac{\sigma }{{\sqrt n }}$的对称区间.之所以取${\mu _{\frac{\alpha }{2}}}$, 是因为$\frac{\alpha }{2}$分位点很好地处理了置信区间区间可靠性和精度的关系.
2.3 基于Jaccard算法的集合相似性计算
Jaccard算法是由Jaccard在1908年提出的, 用于对两个集合的相似度进行比较[28].其中被广泛使用的参数为Jaccard相似系数(Jaccard similarity coefficient), 用于比较有限样本集之间的相似性与差异性, Jaccard相似系数越大, 样本相似度越高.
从20世纪初到现在, Jaccard算法已经在生物学、经济和社会研究领域中被广泛运用并取得了较好的效果. Bell等[29]在评估植物图像分割的子集匹配时采用了Jaccard算法, 对分割图像和地面实际图像这两个像素集合进行相似度的计算. Rinartha等[30]在文章搜索中运用Jaccard相似度对关键词的处理时间和搜索文章的结果精确性进行了比较分析.结果发现Jaccard相似性查询建议将产生更加准确的搜索结果.研究表明, Jaccard相似度的平均绝对误差(Mean absolute error, MAE)相较于皮尔逊相关系数法、对数似然值相似度和余弦相似度等误差较低, 且算法简单, 运算速度快.在通常情况下, Jaccard系数值越大, 样本相似度越高, 本文采用Wu等[31]提出的针对二型模糊集合Jaccard算法, 如式(9)所示.
$ s{m_J} \left( {\tilde A, \tilde B} \right) =\notag\\ {\frac{ \sum\limits_{i = 1}^N {\min ( {{{\bar \mu }_{\tilde A}}( {{x_i}} ), {{\bar \mu }_{\tilde B}}( {{x_i}} )} )}+ \sum\limits_{i = 1}^N {\min ( {{{\underline{\mu } }_{\tilde A}}( {{x_i}} ), {\underline{\mu } }_{\tilde B}( {{x_i}} )} )} }{ \sum\limits_{i = 1}^N {\max ( {{{\bar \mu }_{\tilde A}}( {{x_i}} ), {{\bar \mu }_{\tilde B}}( {{x_i}} )} )} + \sum\limits_{i = 1}^N {\max ( {{{\underline{\mu } }_{\tilde A}}( {{x_i}} ), {\underline{\mu } }_{\tilde B}( {{x_i}} )} )} }} $
(9) 3. 人工交通系统可信度评估实例验证
3.1 系统建模
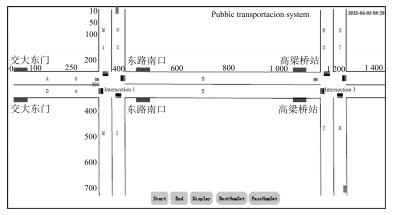
本文选择北京海淀区某道路为典型建模场景进行可信度实验研究, 该路段双向2车道, 包含三个公交车站、两个定时控制的信号灯路口和3条公交线路, 全长约为1.4公里.
研究者以2015年3月至4月中旬的每周二、周三、周四共计六周18天, 在每一天的上午8点到下午8点进行数据调研, 以调研数据作为人工交通系统的数据来源.包括双方向车流量、车辆类型、多点车辆速度等.因为在该场景中, 有比较繁忙的公交线路, 公交线路的参与者又受到周边环境的影响, 具有复杂系统典型性数据特征.因此本文特别对参与公共交通运输的数据:包括上下车乘客数、公交车到、发站时间等也进行了数据调研, 完成了该典型交通场景的人工交通系统建模的数据准备.并选取随机性较强、对公共交通调度规划具有重要影响的乘客上车人数作为人工交通系统可信度评估参数, 进行可信度验证.该路段上三个公交车站在调研时段的乘客等车调研数据如表 1所示(实际系统).限于篇幅, 关于人工交通建模的研究内容将在另文进行阐述.
表 1 三个公交车站上车人数的实际调研数据和人工交通系统运行数据Table 1 The actual data and simulation data of people get on the three bus stops时段 实际系统第1站 仿真系统第1站 实际系统第2站 仿真系统第2站 仿真系统第3站 实际系统第3站 3:00 $\sim$ 3:05 9 13 8 15 4 5 3:06 $\sim$ 3:10 10 15 10 13 0 1 3:11 $\sim$ 3:15 14 9 5 8 3 3 3:16 $\sim$ 3:20 0 25 6 9 1 2 3:21 $\sim$ 3:25 29 20 16 0 6 3 3:26 $\sim$ 3:30 25 3 11 19 3 5 3:31 $\sim$ 3:35 15 17 5 6 4 8 3:36 $\sim$ 3:40 10 0 7 6 3 2 3:41 $\sim$ 3:45 15 9 8 0 5 1 3:46 $\sim$ 3:50 19 15 6 11 1 0 3:51 $\sim$ 3:55 9 21 10 9 4 4 3:56 $\sim$ 4:00 19 4 16 18 0 2 搭建的人工交通系统运行界面如图 3所示.根据实际调研数据, 在人工交通系统中设置该路段初始计划乘车人数为50人, 系统将这50个人随机分布在路段的不同地方, 然后各自判断自己离哪个公交车站更近, 从而选择自己的前进方向.多次运行人工交通系统, 得到三个车站等车乘客人数的仿真数据, 其均值也列入表 1 (仿真系统).
3.2 数据处理
为了对数据进行统一处理, 把每个参数的输入数据除以一个比例因子进行"归十化"到区间$[0, 1]$.对"归十化"得到的数据进行一型模糊化处理, 由式(8)将交通流数据由点数据转化为区间数据, 表 2展示了区间化数据结果.基于此数据基础, 即可构造内嵌的一型隶属度模糊集.设每一个区间左端点为$b$, 右端点为$c$, 左右端点的中间值为$a$, 本仿真中, 用区间数据构造三角型隶属度函数, 则
表 2 三个公交车站上车人数模糊化以后的实际数据和仿真数据Table 2 The actual data and simulation data after fuzzified of people get on the three bus stops时段 实际系统第1站 仿真系统第1站 实际系统第2站 仿真系统第2站 仿真系统第3站 实际系统第3站 3:00 $\sim$ 3:05 2 4 3 5 3 5 6 8 3 5 4 6 3:06 $\sim$ 3:10 2 4 4 6 4 6 6 8 0 1 0 2 3:11 $\sim$ 3:15 3 5 2 4 1 3 3 5 2 4 2 4 3:16 $\sim$ 3:20 0 1 7 9 2 4 3 5 0 2 1 3 3:21 $\sim$ 3:25 6 8 6 8 7 9 0 1 5 7 2 4 3:26 $\sim$ 3:30 6 8 0 2 4 6 5 7 2 4 4 6 3:31 $\sim$ 3:35 4 6 5 7 1 3 2 4 3 5 7 9 3:36 $\sim$ 3:40 2 4 0 1 3 5 2 4 2 4 1 3 3:41 $\sim$ 3:45 4 6 2 4 3 5 0 1 4 6 0 2 3:46 $\sim$ 3:50 5 7 4 6 2 4 4 6 0 2 0 1 3:51 $\sim$ 3:55 2 4 6 8 4 6 4 6 3 5 3 5 3:56 $\sim$ 4:00 5 7 0 2 7 9 8 9 0 1 1 3 $ {\mu _F}\left( x \right) = \begin{cases} \frac{{x - b}}{{a - b}}, &b \leq x \leq a \\ \frac{{c - x}}{{c - a}}, &a < x \leq c \\ 0, &x < b ~\mbox{或}~ x > c \end{cases} $
(10) 因此, 每一个区间都对应着一个一型模糊集.运用式(10)进行集合并运算:
$ {\mu _C}\left( x \right) = \max \left( {{\mu _A}\left( x \right), {\mu _B}\left( x \right)} \right) = {\mu _A}\left( x \right) \cup {\mu _B}\left( x \right) $
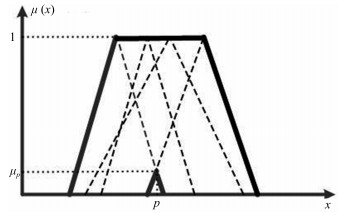
(11) 其中, ${\mu _A}\left(x \right)$和${\mu _B}\left(x \right)$为一型模糊集合$A$和$B$的隶属度函数, ${\mu _C}\left(x \right)$为集合并运算得到的新集合${ C}$的隶属度函数, 即二型模糊集合$CoS$.本文将某5分钟的前两个时段和本时段及后一个时段共四个时段进行了并运算, 得$CoS$如图 4所示.
对实际交通系统和人工交通系统, 研究时间轴为每一天的上午8点到下午8点, 共12个小时.因为按照5分钟进行数据统计, 所以得到144个$CoS$, 限于篇幅, 仅列出一个5分钟数据采样时段, 两个系统的二型模糊集合图例, 结果如图 5所示.
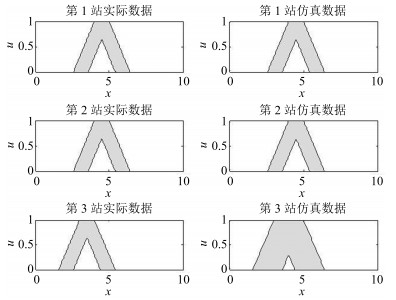 图 5 三个候车站实际候车乘客数据和对应的人工交通系统候车乘客人数数据的二型模糊集合Fig. 5 Two-type fuzzy set of three stations actual data and corresponding simulation data
图 5 三个候车站实际候车乘客数据和对应的人工交通系统候车乘客人数数据的二型模糊集合Fig. 5 Two-type fuzzy set of three stations actual data and corresponding simulation data经过解模糊化处理, 可以得到两个系统分别由144个重心组成的上限重心和下限重心值构造出来的144个集合, 根据式(9)可计算出两个系统三个站点各144个集合的相似度值, 记为$Jsm(x)$ $(x=1$, $2$, $3)$.
3.3 模型评估
由式(9)可计算得到人工公共交通系统可信度评估结果:
第1站的评估结果为$Jsm (1) = 1$
第2站的评估结果为$Jsm (2) = 1$
第3站的评估结果为$Jsm (3) = 0.6331$
整个系统的评估结果为
$ Jsm = \frac{1}{3}\sum\limits_{x = 1}^3 {Jsm(x) =0.88} $
针对这一结果, 本文使用克朗巴哈系数(Cronbach$'$s alpha)进行评价, 通常Cronbach系数的值在0和1之间.如果系数不超过0.6, 一般认为内部一致可信度不足:达到0.7 $\sim$ 0.8时表示量表具有相当的可信度, 达到0.8 $\sim$ 0.9时说明量表可信度非常好, 如表 3所示[32].本文所建立的人工交通系统, 以车站候车人数为计算指标, 得到的可信度为0.88, 表明人工交通系统很可信.
表 3 可信度值与Cronbach系数的关系Table 3 The relationship between the value of credibility and Cronbach coefficient系统可信程度 Cronbach系数(可信度) 不可信 $ < 0.3$ 勉强可信 $0.3 \leq\alpha < 0.4$ 可信 $0.4 \leq\alpha < 0.5$ 很可信(最常见) $0.5 \leq\alpha < 0.7$ 很可信(次常见) $0.7 \leq\alpha < 0.9$ 十分可信 $0.9 \leq\alpha$ 4. 结束语
本文进行了人工交通系统模型可信度评估的研究:针对交通数据的不确定性和随机性特性, 在可可信度评估中引入区间二型模糊集理论, 利用基于统计的数据一致性分析思想, 构建了基于区间二型模糊集方法的人工系统可信度评估方法.本文核心思想是对实际系统和人工系统的输出数据进行了二重处理, 一重处理通过置信区间获取数据的统计特征, 同时区间化得到二重处理的输入数据:二重处理通过二型模糊集方法处理不确定性数据、随机性数据以及噪声数据的能力, 获得更细致刻画系统特性的输出数据集, 通过两个数据集的相似性程度评估系统的可信度.
本文使用人工交通系统中候车乘客人数这一类易受周边环境影响的数据进行了计算验证, 结果表明了基于区间二型模糊集合的可信度评估方法的有效性和合理性.
本文的研究过程中还存在着如下一些问题: 1)在建模过程中没有完全提取交通系统的所有参数及特性; 2)在案例研究中, 也只针对公交运行过程中乘客上车人数数据进行评估, 相对单一.后续的研究工作要继续完善人工交通系统模型, 获得更多类型的数据, 通过更多案例研究实现系统的可信度评估.同时, 也将研究如何通过可信度评估过程及结果对人工交通系统建模过程提出优化建议.
-

图 1 近年全国总用电量趋势(单位: 亿千瓦时)
Fig. 1 Trend of national total electricity consumption in recent years (unit: 100 million kW·h)

图 6 电力设施红外和可见光融合图像
Fig. 6 Infrared and visible light fusion images of power facilities

图 11 基于可见光和点云的杆塔倾斜检测流程图
Fig. 11 Flow chart of tower tilt detection based on visible light and point cloud

图 13 电力架空线路缺陷检测及三维台账拓扑数字孪生体
Fig. 13 Defect detection of power overhead lines and three-dimensional ledger topology digital twins
表 1 电力设施机器人巡检智能感知关键技术
Table 1 Key technologies for intelligent perception in robotic inspection of power facilities
 下载: 导出CSV
下载: 导出CSV
表 3 可见光红外双光融合方法分类
Table 3 Classification of visible light infrared dual-light fusion methods
方法 优点 缺点 基于多尺度变换的方法 多层次子图像保留了更多图像细节信息 基于预先设定的基函数进行图像融合,
易忽略源图像部分重要特征基于稀疏表示的方法 超完备字典蕴涵丰富的基原子, 有利于图像更好的表达和提取 难以应对复杂图像融合 基于神经网络的方法 避免了传统算法手动设计复杂的分解级别和融合规则, 并有效保留源图像信息 对计算资源需求较大, 暂未大量应用
下载: 导出CSV
表 4 电力设施多模态精细化巡检应用
Table 4 Application of multi-modal fine inspection in power facilities
典型案例 融合模态 方法原理 电力部件精准分割 可见光+红外 结合可见光的高分辨率和红外图像的温度特性, 实现高精度部件分割 输电线路异物检测 可见光+点云 结合可见光的高分辨率和点云的形态特征, 充分识别线路异物 线路杆塔倾斜检测 可见光+点云 结合可见光的颜色信息和点云的位置信息, 准确分割杆塔, 实现倾斜度检测 线路覆冰多模态检测 可见光+点云 结合可见光的颜色信息和点云的位置信息定位电力线, 通过坐标计算覆冰厚度 台账异常检测 可见光+点云 通过可见光实现台账目标识别, 利用点云构建数字孪生网络以实现台账校准
下载: 导出CSV
-
[1] 吴庆, 赵涛, 佃松宜, 郭锐, 李胜川, 方红帏, 等. 基于FPSO的电力巡检机器人的广义二型模糊逻辑控制. 自动化学报, 2022, 48(6): 1482−1492Wu Qing, Zhao Tao, Dian Song-Yi, Guo Rui, Li Sheng-Chuan, Fang Hong-Wei, et al. General type-2 fuzzy logic control for a power-line inspection robot based on FPSO. Acta Automatica Sinica, 2022, 48(6): 1482−1492 [2] Dian S Y, Chen L, Hoang S, Pu M, Liu J Y. Dynamic balance control based on an adaptive gain-scheduled backstepping scheme for power-line inspection robots. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 198−208 doi: 10.1109/JAS.2017.7510721 [3] 王耀南, 江一鸣, 姜娇, 张辉, 谭浩然, 彭伟星, 等. 机器人感知与控制关键技术及其智能制造应用. 自动化学报, 2023, 49(3): 494−513Wang Yao-Nan, Jiang Yi-Ming, Jiang Jiao, Zhang Hui, Tan Hao-Ran, Peng Wei-Xing, et al. Key technologies of robot perception and control and its intelligent manufacturing applications. Acta Automatica Sinica, 2023, 49(3): 494−513 [4] 张振国, 毛建旭, 谭浩然, 王耀南, 张雪波, 江一鸣. 重大装备制造多机器人任务分配与运动规划技术研究综述. 自动化学报, 2024, 50(1): 21−41Zhang Zhen-Guo, Mao Jian-Xu, Tan Hao-Ran, Wang Yao-Nan, Zhang Xue-Bo, Jiang Yi-Ming. A review of task allocation and motion planning for multi-robot in major equipment manufacturing. Acta Automatica Sinica, 2024, 50(1): 21−41 [5] Li J Q, Xu Y Q, Nie K H, Cao B F, Zuo S N, Zhu J. PEDNet: A lightweight detection network of power equipment in infrared image based on YOLOv4-tiny. IEEE Transactions on Instrumentation and Measurement, 2023, 72: Article No. 5004312 [6] Chen G, Shao F, Chai X L, Chen H W, Jiang Q P, Meng X C, et al. CGMDRNet: Cross-guided modality difference reduction network for RGB-T salient object detection. IEEE Transactions on Circuits and Systems for Video Technology, 2022, 32(9): 6308−6323 doi: 10.1109/TCSVT.2022.3166914 [7] Koji K, Takehisa Y, Tomohiro M, Katsuyoshi S. Development of substation patrol robot, overhead distribution line works manipulator and underground cable conduit monitor robot. Robot, 1988, 64: 65−73 [8] Masafumi N. Development of a patrolling and inspection robot at 500 kV Transformer substation. (Results of field test). R&D News Kansai, 1999, 386: 13−15 [9] Allan J F, Beaudry J. Robotic systems applied to power substations——A state-of-the-art survey. In: Proceedings of the 3rd International Conference on Applied Robotics for the Power Industry (CARPI). Foz do Iguacu, Brazil: IEEE, 2014. 1−6 [10] Beaudry J, Poirier S. Véhicule Téléopéré Pour Inspection Visuelle Et Thermographique Dans Les Postes De Transformation, Technical Report IREQ-2012-0121, IREQ (Hydro-Québec Research Institute), Canada, 2012. [11] 鲁守银, 钱庆林, 张斌, 王明瑞, 李向东, 王宏. 变电站设备巡检机器人的研制. 电力系统自动化, 2006, 30(13): 94−98 doi: 10.3321/j.issn:1000-1026.2006.13.020Lu Shou-Yin, Qian Qing-Lin, Zhang Bin, Wang Ming-Rui, Li Xiang-Dong, Wang Hong. Development of a mobile robot for substation equipment inspection. Automation of Electric Power Systems, 2006, 30(13): 94−98 doi: 10.3321/j.issn:1000-1026.2006.13.020 [12] Guo R, Han L, Cheng X Q. Omni-directional vision for robot navigation in substation environments. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO). Guilin, China: IEEE, 2009. 1272−1275 [13] Guo R, Xiao P, Han L, Cheng X Q. GPS and DR integration for robot navigation in substation environments. In: Proceedings of the IEEE International Conference on Information and Automation. Harbin, China: IEEE, 2010. 2009−2012 [14] Zhou Z Y, Zhang C T, Xu C, Xiong F, Zhang Y, Umer T. Energy-efficient industrial internet of UAVs for power line inspection in smart grid. IEEE Transactions on Industrial Informatics, 2018, 14(6): 2705−2714 doi: 10.1109/TII.2018.2794320 [15] Vapnik V N. The Nature of Statistical Learning Theory. New York: Springer, 2000.Vapnik V N. The Nature of Statistical Learning Theory. New York: Springer, 2000. [16] Ho T K. Random decision forests. In: Proceedings of the 3rd International Conference on Document Analysis and Recognition. Montreal, Canada: IEEE, 1995. 278−282 [17] 何洪英, 姚建刚, 蒋正龙, 汪新秀, 李伟伟. 基于支持向量机的高压绝缘子污秽等级红外热像检测. 电力系统自动化, 2005, 29(24): 70−74, 82He Hong-Ying, Yao Jian-Gang, Jiang Zheng-Long, Wang Xin-Xiu, Li Wei-Wei. Infrared thermal image detecting of high voltage insulator contamination grades based on support vector machine. Automation of Electric Power Systems, 2005, 29(24): 70−74, 82 [18] Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez A N, et al. Attention is all you need. In: Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach, USA: ACM, 2017. 6000−6010 [19] Carion N, Massa F, Synnaeve G, Usunier N, Kirillov A, Zagoruyko S. End-to-end object detection with transformers. In: Proceedings of the 16th European Conference on Computer Vision. Glasgow, UK: Springer, 2020. 213−229 [20] Zhu X Z, Su W J, Lu L W, Li B, Wang X G, Dai J F. Deformable DETR: Deformable Transformers for end-to-end object detection. In: Proceedings of the 9th International Conference on Learning Representations. Vienna, Austria: OpenReview, 2021.Zhu X Z, Su W J, Lu L W, Li B, Wang X G, Dai J F. Deformable DETR: Deformable Transformers for end-to-end object detection. In: Proceedings of the 9th International Conference on Learning Representations. Vienna, Austria: OpenReview, 2021. [21] Zong Z F, Song G L, Liu Y. DETRs with collaborative hybrid assignments training. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Paris, France: IEEE, 2023. 6725−6735 [22] Zhang S L, Wang X J, Wang J Q, Pang J M, Lyu C Q, Zhang W W, et al. Dense distinct query for end-to-end object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, Canada: IEEE, 2023. 7329−7338 [23] Girshick R, Donahue J, Darrell T, Malik J. Rich feature hierarchies for accurate object detection and semantic segmentation. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Columbus, USA: IEEE, 2014. 580−587 [24] Girshick R. Fast R-CNN. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Santiago, Chile: IEEE, 2015. 1440−1448 [25] Ren S Q, He K M, Girshick R, Sun J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137−1149 doi: 10.1109/TPAMI.2016.2577031 [26] Tang X, Du D K, He Z Q, Liu J T. PyramidBox: A context-assisted single shot face detector. In: Proceedings of the 15th European Conference on Computer Vision (ECCV). Munich, Germany: Springer, 2018. 812−828 [27] Cai Z W, Vasconcelos N. Cascade R-CNN: Delving into high quality object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 6154−6162 [28] Redmon J, Divvala S, Girshick R, Farhadi A. You only look once: Unified, real-time object detection. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, USA: IEEE, 2016. 779−788 [29] Liu W, Anguelov D, Erhan D, Szegedy C, Reed S, Fu C Y, et al. SSD: Single shot multibox detector. In: Proceedings of the 14th European Conference on Computer Vision (ECCV). Amsterdam, The Netherlands: Springer, 2016. 21−37 [30] Lin T Y, Goyal P, Girshick R, He K M, Dollár P. Focalloss for dense object detection. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Venice, Italy: IEEE, 2017. 2999−3007 [31] Yi J F, Mao J X, Zhang H, Zeng K, Tao Z M, Zhong H, et al. PSTL-Net: A patchwise self-texture-learning network for transmission line inspection. IEEE Transactions on Instrumentation and Measurement, 2024, 73: Article No. 5005714 [32] Liu X Y, Miao X R, Jiang H, Chen J, Wu M, Chen Z H. Component detection for power line inspection using a graph-based relation guiding network. IEEE Transactions on Industrial Informatics, 2023, 19(9): 9280−9290 doi: 10.1109/TII.2022.3227638 [33] Barrow H G, Tenenbaum J M. Recovering intrinsic scene characteristics from images. Computer Vision Systems. London: Academic Press, 1978. [34] Canny J. A computational approach to edge detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, PAMI-8(6): 679−698 doi: 10.1109/TPAMI.1986.4767851 [35] Ke L, Tai Y W, Tang C K. Occlusion-aware instance segmentation via bilayer network architectures. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(8): 10197−10211 doi: 10.1109/TPAMI.2023.3246174 [36] Ronneberger O, Fischer P, Brox T. U-Net: Convolutional networks for biomedical image segmentation. In: Proceedings of the 18th International Conference on Medical Image Computing and Computer-assisted Intervention (MICCAI). Munich, Germany: Springer, 2015. 234−241 [37] Badrinarayanan V, Kendall A, Cipolla R. SegNet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481−2495 doi: 10.1109/TPAMI.2016.2644615 [38] Chen L C, Papandreou G, Kokkinos I, Murphy K, Yuille A L. Semantic image segmentation with deep convolutional nets and fully connected CRFs. arXiv: 1412.7062, 2015.Chen L C, Papandreou G, Kokkinos I, Murphy K, Yuille A L. Semantic image segmentation with deep convolutional nets and fully connected CRFs. arXiv: 1412.7062, 2015. [39] Chen L C, Zhu Y K, Papandreou G, Schroff F, Adam H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In: Proceedings of the 15th European Conference on Computer Vision (ECCV). Munich, Germany: Springer, 2018. 833−851 [40] Charles R Q, Hao S, Mo K C, Guibas L J. PointNet: Deep learning on point sets for 3D classification and segmentation. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, USA: IEEE, 2017. 77−85Charles R Q, Hao S, Mo K C, Guibas L J. PointNet: Deep learning on point sets for 3D classification and segmentation. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, USA: IEEE, 2017. 77−85 [41] Charles R Q, Yi L, Su H, Guibas L J. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In: Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach, USA: ACM, 2017. 5105−5114Charles R Q, Yi L, Su H, Guibas L J. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In: Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach, USA: ACM, 2017. 5105−5114 [42] Shi S S, Guo C X, Jiang L, Wang Z, Shi J P, Wang X G. PV-RCNN: Point-voxel feature set abstraction for 3D object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 10526−10535 [43] Zhao N, Chua T S, Lee G H. SESS: Self-ensembling semi-supervised 3D object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 11076−11084 [44] Wang Y, Sun Y B, Liu Z W, Sarma S E, Bronstein M M, Solomon J M. Dynamic graph CNN for learning on point clouds. ACM Transactions on Graphics, 2019, 38(5): Article No. 146 [45] Zhao Z B, Liu B, Zhai Y J, Zhao W Q, Su P. Dual graph reasoning network for oil leakage segmentation in substation equipment. IEEE Transactions on Instrumentation and Measurement, 2024, 73: Article No. 3502415 [46] Zhao Z B, Feng S, Zhai Y J, Zhao W Q, Li G. Infrared thermal image instance segmentation method for power substation equipment based on visual feature reasoning. IEEE Transactions on Instrumentation and Measurement, 2023, 72: Article No. 5029613 [47] MacQueen J. Some methods for classification and analysis of multivariate observations. In: Proceedings of the 5th Berkeley Symposium on Mathematical Statistics and Probability. Berkeley, USA: University of California Press, 1967. 281−297 [48] Shi J B, Malik J. Normalized cuts and image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(8): 888−905 doi: 10.1109/34.868688 [49] Goodfellow I J, Pouget-Abadie J, Mirza M, Xu B, Warde-Farley D, Ozair S, et al. Generative adversarial nets. In: Proceedings of the 27th International Conference on Neural Information Processing Systems (NeurIPS). Montreal, Canada: ACM, 2014. 2672−2680 [50] Jiang B, Zhang Z Y, Lin D D, Tang J , Luo B. Semi-supervised learning with graph learning-convolutional networks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 11305−11312Jiang B, Zhang Z Y, Lin D D, Tang J , Luo B. Semi-supervised learning with graph learning-convolutional networks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 11305−11312 [51] Mehta S, Rastegari M, Caspi A, Shapiro L, Hajishirzi H. ESPNet: Efficient spatial pyramid of dilated convolutions for semantic segmentation. In: Proceedings of the 15th European Conference on Computer Vision (ECCV). Munich, Germany: Springer, 2018. 561−580 [52] Maturana D, Scherer S. VoxNet: A 3D convolutional neural network for real-time object recognition. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg, Germany: IEEE, 2015. 922−928 [53] Shi S, Wang Z, Wang X, Li H. Part-A2 net: 3D part-aware and aggregation neural network for object detection from point cloud. Pattern Recognition, 2022, 122: Article No. 108242 [54] Zhou Y, Tuzel O. VoxelNet: End-to-end learning for point cloud based 3D object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Salt Lake City, USA: IEEE, 2018. 4490−4499 [55] Ouyang Z C, Dong X Y, Cui J H, Niu J W, Guizani M. PV-EncoNet: Fast object detection based on colored point cloud. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 12439−12450 doi: 10.1109/TITS.2021.3114062 [56] Dong Z, Li J, Li Y. 3DV-Net: Learning multi-level multi-scale 3D features from point cloud for object detection. Sensors, 2021, 21(11): Article No. 3875 doi: 10.3390/s21113875 [57] Shi S S, Jiang L, Deng J J, Wang Z, Guo C X, Shi J P, et al. PV-RCNN++: Point-voxel feature set abstraction with local vector representation for 3D object detection. arXiv: 2102.00463, 2022.Shi S S, Jiang L, Deng J J, Wang Z, Guo C X, Shi J P, et al. PV-RCNN++: Point-voxel feature set abstraction with local vector representation for 3D object detection. arXiv: 2102.00463, 2022. [58] Hu Q Y, Yang B, Xie L H, Rosa S, Guo Y L, Wang Z H. RandLA-Net: Efficient semantic segmentation of large-scale point clouds. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 11105−11114 [59] Shi W J, Rajkumar R. Point-GNN: Graph neural network for 3D object detection in a point cloud. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 1708−1716 [60] Yan X, Zheng C D, Li Z, Wang S, Cui S G. PointASNL: Robust point clouds processing using nonlocal neural networks with adaptive sampling. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 5588−5597 [61] Li W, Luo Z P, Xiao Z L, Chen Y P, Wang C, Li J. A GCN-based method for extracting power lines and pylons from airborne LiDAR data. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: Article No. 5700614 [62] Jeong S, Kim D, Kim S, Ham J W, Lee J K, Oh K Y. Real-time environmental cognition and sag estimation of transmission lines using UAV equipped with 3-D Lidar system. IEEE Transactions on Power Delivery, 2021, 36(5): 2658−2667 doi: 10.1109/TPWRD.2020.3024965 [63] Munir N, Awrangjeb M, Stantic B. An iterative graph-based method for constructing gaps in high-voltage bundle conductors using airborne LiDAR point cloud data. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: Article No. 5700316 [64] Huang J J, Shen Y Q, Wang J G, Ferreira V. Automatic pylon extraction using color-aided classification from UAV LiDAR point cloud data. IEEE Transactions on Instrumentation and Measurement, 2023, 72: Article No. 2520611 [65] Ibrahim M, Akhtar N, Anwar S, Mian A. SAT3D: Slot attention Transformer for 3D point cloud semantic segmentation. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(5): 5456−5466 doi: 10.1109/TITS.2023.3243643 [66] 张贵峰, 张志强, 沈锋. 变电站巡检机器人现状与发展综述. 云南电力技术, 2022, 50(6): 2−8Zhang Gui-Feng, Zhang Zhi-Qiang, Shen Feng. Review of the current situation and development of substation inspection robots. Yunnan Electric Power, 2022, 50(6): 2−8 [67] 袁利, 姜甜甜, 魏春岭, 杨孟飞. 空间控制技术发展与展望. 自动化学报, 2023, 49(3): 476−493Yuan Li, Jiang Tian-Tian, Wei Chun-Ling, Yang Meng-Fei. Advances and perspectives of space control technology. Acta Automatica Sinica, 2023, 49(3): 476−493 [68] 黄观文, 王媛媛, 龙正鑫, 秦志伟, 张勤. GNSS卫星轨道机动探测技术进展. 导航定位学报, 2024, 12(2): 1−12Huang Guan-Wen, Wang Yuan-Yuan, Long Zheng-Xin, Qin Zhi-Wei, Zhang Qin. Technique advancements in GNSS satellite orbit maneuver detection. Journal of Navigation and Positioning, 2024, 12(2): 1−12 [69] Zhang X C, Demiris Y. Visible and infrared image fusion using deep learning. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(8): 10535−10554 doi: 10.1109/TPAMI.2023.3261282 [70] Li T, Yu H Y. Visual-inertial fusion-based human pose estimation: A review. IEEE Transactions on Instrumentation and Measurement, 2023, 72: Article No. 4007816 [71] Sun Z H, Ke Q H, Rahmani H, Bennamoun M, Wang G, Liu J. Human action recognition from various data modalities: A review. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(3): 3200−3225 [72] Yuan D, Zhang H P, Shu X, Liu Q, Chang X J, He Z Y, et al. Thermal infrared target tracking: A comprehensive review. IEEE Transactions on Instrumentation and Measurement, 2024, 73: Article No. 5000419 [73] Tian C, Zhou Z K, Huang Y Q, Li G J, He Z Y. Cross-modality proposal-guided feature mining for unregistered RGB-thermal pedestrian detection. IEEE Transactions on Multimedia, 2024, 26: 6449−6461 doi: 10.1109/TMM.2024.3350926 [74] Li X Y, Chen S G, Tian C N, Zhou H, Zhang Z X. M2FNet: Mask-guided multi-level fusion for RGB-T pedestrian detection. IEEE Transactions on Multimedia, 2024, 26: 8678−8690 doi: 10.1109/TMM.2024.3381377 [75] Xu Y W, Fan K G, Hu Q, Zhang X T. Positioning of suspended permanent magnet maglev trains using satellite-ground multisensor fusion. IEEE Sensors Journal, 2024, 24(10): 16816−16825 doi: 10.1109/JSEN.2024.3384699 [76] Cossio-Montefinale L, Ruiz-Del-Solar J, Verschae R. Cherry CO dataset: A dataset for cherry detection, segmentation and maturity recognition. IEEE Robotics and Automation Letters, 2024, 9(6): 5552−5558 doi: 10.1109/LRA.2024.3393214 [77] Rayhana R, Ma Z Y, Liu Z, Xiao G Z, Ruan Y F, Sangha J S. A review on plant disease detection using hyperspectral imaging. IEEE Transactions on AgriFood Electronics, 2023, 1(2): 108−134 doi: 10.1109/TAFE.2023.3329849 [78] Song M, Um G M, Lee H K, Seo J, Kim W. Dynamic residual filtering with Laplacian pyramid for instance segmentation. IEEE Transactions on Multimedia, 2023, 25: 6892−6903 doi: 10.1109/TMM.2022.3215306 [79] Wu S J, Wang Y B. Seismic image dip estimation by multiscale principal component analysis. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: Article No. 5900410 [80] Grossmann A, Morlet J. Decomposition of hardy functions into square integrable wavelets of constant shape. SIAM Journal on Mathematical Analysis, 1984, 15(4): 723−736 doi: 10.1137/0515056 [81] Li X X, Cheng X Z, Xu Y W, Jiao Y, Huang W C, Cui Y Y, et al. Multi-frequency ultrasound imaging fusion method based on wavelet transform for guided screw insertion. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2024, 71(3): 395−407 doi: 10.1109/TUFFC.2023.3348100 [82] Yang B, Li S T. Multifocus image fusion and restoration with sparse representation. IEEE Transactions on Instrumentation and Measurement, 2010, 59(4): 884−892 doi: 10.1109/TIM.2009.2026612 [83] Liu Y, Liu S P, Wang Z F. A general framework for image fusion based on multi-scale transform and sparse representation. Information Fusion, 2015, 24: 147−164 doi: 10.1016/j.inffus.2014.09.004 [84] Yin H T. Sparse representation with learned multiscale dictionary for image fusion. Neurocomputing, 2015, 148: 600−610 doi: 10.1016/j.neucom.2014.07.003 [85] Yang B, Li S T. Pixel-level image fusion with simultaneous orthogonal matching pursuit. Information Fusion, 2012, 13(1): 10−19 doi: 10.1016/j.inffus.2010.04.001 [86] Engan K, Aase S O, Husoy J H. Method of optimal directions for frame design. In: Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing. Phoenix, USA: IEEE, 1999. 2443−2446 [87] Aharon M, Elad M, Bruckstein A. K-SVD: An algorithm for designing overcomplete dictionaries for sparse representation. IEEE Transactions on Signal Processing, 2006, 54(11): 4311−4322 doi: 10.1109/TSP.2006.881199 [88] Zong Z Y, Fu T, Yin X Y. High-dimensional generalized orthogonal matching pursuit with singular value decomposition. IEEE Geoscience and Remote Sensing Letters, 2023, 20: Article No. 7502205 [89] Liu S J, Ma J J, Cui C K. FPGA implementation of threshold projection orthogonal matching pursuit algorithm for compressed sensing reconstruction. IEEE Transactions on Circuits and Systems I: Regular Papers, 2024, 71(3): 1184−1197 doi: 10.1109/TCSI.2023.3345537 [90] Bai L, Yao S L, Gao K, Huang Y J, Tang R J, Yan H, et al. Joint sparse representations and coupled dictionary learning in multisource heterogeneous image pseudo-color fusion. IEEE Sensors Journal, 2023, 23(24): 30620−30632 doi: 10.1109/JSEN.2023.3325364 [91] Li H, Wu X J, Kittler J. Infrared and visible image fusion using a deep learning framework. In: Proceedings of the 24th International Conference on Pattern Recognition (ICPR). Beijing, China: IEEE, 2018. 2705−2710 [92] Ren X Y, Meng F Y, Hu T, Liu Z J, Wang C. Infrared-visible image fusion based on convolutional neural networks (CNN). In: Proceedings of the 8th International Conference on Intelligent Science and Big Data Engineering. Lanzhou, China: Springer, 2018. 301−307 [93] Ma J Y, Yu W, Liang P W, Li C, Jiang J J. FusionGAN: A generative adversarial network for infrared and visible image fusion. Information Fusion, 2019, 48: 11−26 doi: 10.1016/j.inffus.2018.09.004 [94] Sun F M, Zhang K, Yuan X, Zhao C X. Feature enhancement and fusion for RGB-T salient object detection. In: Proceedings of the IEEE International Conference on Image Processing (ICIP). Kuala Lumpur, Malaysia: IEEE, 2023. 1300−1304 [95] Zhu X, Liu J, Xiong X Z, Luo Z Q. Maximize peak-to-sidelobe ratio for real-time RGB-T tracking. IEEE Transactions on Instrumentation and Measurement, 2024, 73: Article No. 4502104 [96] Liu J, Luo Z Q, Xiong X Z. Online learning samples and adaptive recovery for robust RGB-T tracking. IEEE Transactions on Circuits and Systems for Video Technology, 2024, 34(2): 724−737 doi: 10.1109/TCSVT.2023.3288853 [97] Lv Y, Liu Z, Li G Y. Context-aware interaction network for RGB-T semantic segmentation. IEEE Transactions on Multimedia, 2024, 26: 6348−6360 doi: 10.1109/TMM.2023.3349072 [98] Liang W L, Shan C F, Yang Y J, Han J G. Multi-branch differential bidirectional fusion network for RGB-T semantic segmentation. IEEE Transactions on Intelligent Vehicles, DOI: 10.1109/TIV.2024.3374793 [99] Chen G, Shao F, Chai X L, Chen H W, Jiang Q P, Meng X C, et al. Modality-induced transfer-fusion network for RGB-D and RGB-T salient object detection. IEEE Transactions on Circuits and Systems for Video Technology, 2023, 33(4): 1787−1801 doi: 10.1109/TCSVT.2022.3215979 [100] 陈建, 廖燕俊, 王适, 郑明魁, 苏立超. 自适应分割的视频点云多模式帧间编码方法. 自动化学报, 2023, 49(8): 1707−1722Chen Jian, Liao Yan-Jun, Wang Shi, Zheng Ming-Kui, Su Li-Chao. An adaptive segmentation based multi-mode inter-frame coding method for video point cloud. Acta Automatica Sinica, 2023, 49(8): 1707−1722 [101] Chen L, Luo X. Tensor distribution regression based on the 3D conventional neural networks. IEEE/CAA Journal of Automatica Sinica, 2023, 10(7): 1628−1630 doi: 10.1109/JAS.2023.123591 [102] Ye S Q, Chen D D, Han S F, Liao J. Robust point cloud segmentation with noisy annotations. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(6): 7696−7710 doi: 10.1109/TPAMI.2022.3225323 [103] 张凯, 杨朋澄, 彭开香, 陈志文. 基于深度置信网络的多模态过程故障评估方法及应用. 自动化学报, 2024, 50(1): 89−102Zhang Kai, Yang Peng-Cheng, Peng Kai-Xiang, Chen Zhi-Wen. A deep belief network-based fault evaluation method for multimode processes and its applications. Acta Automatica Sinica, 2024, 50(1): 89−102 [104] 刘云鹏, 来庭煜, 刘嘉硕, 魏晓光, 裴少通. 特高压直流换流阀饱和电抗器振动声纹特性与松动程度声纹检测方法. 电工技术学报, 2023, 38(5): 1375−1389Liu Yun-Peng, Lai Ting-Yu, Liu Jia-Shuo, Wei Xiao-Guang, Pei Shao-Tong. Vibration voiceprint characteristics and looseness detection method of UHVDC converter valve saturable reactor. Transactions of China Electrotechnical Society, 2023, 38(5): 1375−1389 [105] Khotimah K, Santoso A B, Ma'arif M, Azhiimah A N, Suprianto B, Sumbawati M S, et al. Validation of voice recognition in various Google voice languages using voice recognition module V3 based on microcontroller. In: Proceedings of the 3rd International Conference on Vocational Education and Electrical Engineering (ICVEE). Surabaya, Indonesia: IEEE, 2020. 1−6 [106] Brunelli R, Falavigna D. Person identification using multiple cues. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1995, 17(10): 955−966 doi: 10.1109/34.464560 [107] Noda K, Yamaguchi Y, Nakadai K, Okuno H G, Ogata T. Audio-visual speech recognition using deep learning. Applied Intelligence, 2015, 42(4): 722−737 doi: 10.1007/s10489-014-0629-7 [108] 张玉珍, 魏带娣, 王建宇, 戴跃伟. 基于多模态融合的足球视频语义分析. 计算机科学, 2010, 37(7): 273−276Zhang Yu-Zhen, Wei Dai-Di, Wang Jian-Yu, Dai Yue-Wei. Semantic analysis for soccer video based on fusion of multimodal features. Computer Science, 2010, 37(7): 273−276 [109] Xu Z J, Wang R F, Wang J, Yu D H. Parkinson's disease detection based on spectrogram-deep convolutional generative adversarial network sample augmentation. IEEE Access, 2020, 8: 206888−206900 doi: 10.1109/ACCESS.2020.3037775 [110] 施胜丹, 黄金军, 朱霄珣, 王瑜, 钱白云. 基于声纹SDP-CNN的变压器局部放电模式识别. 电力信息与通信技术, 2022, 20(10): 105−112Shi Sheng-Dan, Huang Jin-Jun, Zhu Xiao-Xun, Wang Yu, Qian Bai-Yun. Partial discharge pattern recognition on transformer based on voiceprint SDP-CNN. Electric Power Information and Communication Technology, 2022, 20(10): 105−112 [111] 陆云才, 廖才波, 李群, 王同磊, 邵剑, 张一. 基于声纹特征和集成学习的变压器缺陷诊断方法. 电力工程技术, 2023, 42(5): 46−55Lu Yun-Cai, Liao Cai-Bo, Li Qun, Wang Tong-Lei, Shao Jian, Zhang Yi. Transformer fault diagnosis method based on voiceprint feature and ensemble learning. Electric Power Engineering Technology, 2023, 42(5): 46−55 [112] 王欢, 王昕, 张峰, 齐笑, 柴方森, 李文鹏. 基于改进生成对抗网络的变压器声纹故障诊断. 智慧电力, 2024, 52(4): 24−31Wang Huan, Wang Xin, Zhang Feng, Qi Xiao, Chai Fang-Sen, Li Wen-Peng. Transformer voiceprint fault diagnosis based on improved generative adversarial network. Smart Power, 2024, 52(4): 24−31 [113] 林颖, 张峰达, 李壮壮, 郑文杰, 戈宁. 基于大模型的红外图像电力设备交互式分割. 网络新媒体技术, 2024, 13(2): 53−60, 67Lin Ying, Zhang Feng-Da, Li Zhuang-Zhuang, Zheng Wen-Jie, Ge Ning. Large model based interactive segmentation of infrared image for power equipment. Network New Media Technology, 2024, 13(2): 53−60, 67 [114] 杨权, 樊绍胜. 基于图像预处理和语义分割的电力巡检机器人视觉导航方法. 电力科学与技术学报, 2023, 38(6): 248−258Yang Quan, Fan Shao-Sheng. Visual navigation method for electric power inspection robot based on image preprocessing and semantic segmentation. Journal of Electric Power Science and Technology, 2023, 38(6): 248−258 [115] 马青山, 朱建宝, 俞鑫春, 张斌. 基于改进DSD-LinkNet的电力安全带分割算法. 电气自动化, 2023, 45(3): 106−108Ma Qing-Shan, Zhu Jian-Bao, Yu Xin-Chun, Zhang Bin. Power safety belt segmentation algorithm based on improved DSD-LinkNet. Electrical Automation, 2023, 45(3): 106−108 [116] 许刚, 李果. 轻量化航拍图像电力线语义分割. 中国图象图形学报, 2021, 26(11): 2605−2618 doi: 10.11834/jig.200690Xu Gang, Li Guo. Research on lightweight neural network of aerial powerline image segmentation. Journal of Image and Graphics, 2021, 26(11): 2605−2618 doi: 10.11834/jig.200690 [117] 左安全, 秦伦明, 王悉, 边后琴, 陈思林. 基于改进DeepLabv3+模型的电力线语义分割方法. 无线电工程, 2023, 53(1): 96−104Zuo An-Quan, Qin Lun-Ming, Wang Xi, Bian Hou-Qin, Chen Si-Lin. Powerline semantic segmentation method based on improved DeepLabv3+ model. Radio Engineering, 2023, 53(1): 96−104 [118] Cui C, Gao T Q, Wei S Y, Du Y N, Guo R Y, Dong S L, et al. PP-LCNet: A lightweight CPU convolutional neural network. arXiv: 2109.15099, 2021.Cui C, Gao T Q, Wei S Y, Du Y N, Guo R Y, Dong S L, et al. PP-LCNet: A lightweight CPU convolutional neural network. arXiv: 2109.15099, 2021. [119] Chollet F. Xception: Deep learning with depthwise separable convolutions. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, USA: IEEE, 2017. 1800−1807 [120] Park J, Woo S, Lee J Y, Kweon I S. BAM: Bottleneck attention module. arXiv: 1807.06514, 2018. [121] Mao M F, Chen Y, Chen W X, Du W, Zhang M, Mao T Q. Power transmission line image segmentation method based on binocular vision and feature pyramid network. In: Proceedings of the International Conference on Sensing, Measurement & Data Analytics in the Era of Artificial Intelligence (ICSMD). Nanjing, China: IEEE, 2021. 1−4 [122] Wang L J, Chen Z L, Hua D, Zheng Z X. Semantic segmentation of transmission lines and their accessories based on UAV-taken images. IEEE Access, 2019, 7: 80829−80839 doi: 10.1109/ACCESS.2019.2923024 [123] Yang L, Kong S Y, Cui S L, Huang H Y, Liu Y H. An efficient end-to-end CNN network for high-voltage transmission line segmentation. In: Proceedings of the 8th International Conference on Cloud Computing and Intelligent Systems (CCIS). Chengdu, China: IEEE, 2022. 565−570 [124] 唐小煜, 黄进波, 冯洁文, 陈锡和. 基于U-net和YOLOv4的绝缘子图像分割与缺陷检测. 华南师范大学学报(自然科学版), 2020, 52(6): 15−21Tang Xiao-Yu, Huang Jin-Bo, Feng Jie-Wen, Chen Xi-He. Image segmentation and defect detection of insulators based on U-net and YOLOv4. Journal of South China Normal University (Natural Science Edition), 2020, 52(6): 15−21 [125] Yu Y J, Cao H, Wang Z Z, Li Y Q, Li K, Xie S Q. Texture-and-shape based active contour model for insulator segmentation. IEEE Access, 2019, 7: 78706−78714 doi: 10.1109/ACCESS.2019.2922257 [126] Tang X, Mao J X, Yi J F, Tao Z M, He Z Y. An insulator feature-enhanced segmentation method based on the residual-type attention mechanism. In: Proceedings of the 5th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC). Chongqing, China: IEEE, 2022. 1507−1511 [127] Han Y F, Han J, Ni Z J, Wang W S, Jiang H Y. Instance segmentation of transmission line images based on an improved D-SOLO network. In: Proceedings of the 3rd International Conference on Power Data Science (ICPDS). Harbin, China: IEEE, 2021. 40−46 [128] Choi H, Yun J P, Kim B J, Jang H, Kim S W. Attention-based multimodal image feature fusion module for transmission line detection. IEEE Transactions on Industrial Informatics, 2022, 18(11): 7686−7695 doi: 10.1109/TII.2022.3147833 [129] Xu C, Li Q W, Jiang X B, Yu D B, Zhou Y Q. Dual-space graph-based interaction network for RGB-thermal semantic segmentation in electric power scene. IEEE Transactions on Circuits and Systems for Video Technology, 2023, 33(4): 1577−1592 doi: 10.1109/TCSVT.2022.3216313 [130] Ma J L, Qian K, Zhang X B, Ma X D. Weakly supervised instance segmentation of electrical equipment based on RGB-T automatic annotation. IEEE Transactions on Instrumentation and Measurement, 2020, 69(12): 9720−9731 doi: 10.1109/TIM.2020.3001796 [131] 孙阳, 李佳. 基于通道剪枝的YOLOv7-tiny输电线路异物检测算法. 计算机工程与应用, 2024, 60(14): 319−328Sun Yang, Li Jia. YOLOv7-tiny transmission line foreign object detection algorithm based on channel pruning. Computer Engineering and Applications, 2024, 60(14): 319−328 [132] 沈晓峰, 谢伟, 孙路, 李轶, 贺润平. 基于相邻帧差法的输电线路异物目标检测研究. 自动化仪表, 2023, 44(10): 20−24Shen Xiao-Feng, Xie Wei, Sun Lu, Li Yi, He Run-Ping. Research on foreign object target detection on transmission lines based on adjacent frame difference method. Process Automation Instrumentation, 2023, 44(10): 20−24 [133] Lowe D G. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60(2): 91−110 doi: 10.1023/B:VISI.0000029664.99615.94 [134] 余沿臻, 邱志斌, 周银彪, 朱轩, 王青. 基于卷积神经网络与ECOC-SVM的输电线路异物检测. 智慧电力, 2022, 50(3): 87−92, 107Yu Yan-Zhen, Qiu Zhi-Bin, Zhou Yin-Biao, Zhu Xuan, Wang Qing. Foreign body detection for transmission lines based on convolutional neural network and ECOC-SVM. Smart Power, 2022, 50(3): 87−92, 107 [135] Jiang H, Huang W L, Chen J, Liu X Y, Miao X R, Zhuang S B. Detection of bird nests on power line patrol using single shot detector. In: Proceedings of the Chinese Automation Congress (CAC). Hangzhou, China: IEEE, 2019. 3409−3414 [136] 杨征. 基于ZigBee和GSM技术输电线路杆塔倾斜监测系统的研究 [硕士学位论文], 华北电力大学, 中国, 2012.Yang Zheng. Tilt Monitoring System of Transmission Line Towers Based on the ZigBee and GSM Technology [Master thesis], North China Electric Power University, China, 2012. [137] Li Q Q, Chen Z P, Hu Q W. A model-driven approach for 3D modeling of pylon from airborne LiDAR data. Remote Sensing, 2015, 7(9): 11501−11524 doi: 10.3390/rs70911501 [138] 沈小军, 秦川, 杜勇, 于忻乐. 复杂地形电力线机载激光雷达点云自动提取方法. 同济大学学报(自然科学版), 2018, 46(7): 982−987Shen Xiao-Jun, Qin Chuan, Du Yong, Yu Xin-Le. An automatic power line extraction method from airborne light detection and ranging point cloud in complex terrain. Journal of Tongji University (Natural Science), 2018, 46(7): 982−987 [139] 柳长安, 孙书明, 赵丽娟. 基于激光点云实现杆塔提取的轻量级网络. 激光技术, 2021, 45(3): 367−372Liu Chang-An, Sun Shu-Ming, Zhao Li-Juan. A lightweight network for power tower extraction from laser point cloud. Laser Technology, 2021, 45(3): 367−372 [140] 芦竹茂, 龚浩, 金秋衡, 胡庆武, 李加元. 无人机激光雷达点云电力杆塔倾斜状态测量. 应用科学学报, 2022, 40(3): 389−399Lu Zhu-Mao, Gong Hao, Jin Qiu-Heng, Hu Qing-Wu, Li Jia-Yuan. Tilt rate measurement of power tower based on UAV LiDAR point cloud. Journal of Applied Sciences, 2022, 40(3): 389−399 [141] 徐梁刚, 时磊, 陈凤翔, 王时春, 龙新, 王迪. 基于激光点云的输电线路杆塔倾斜检测算法. 激光技术, 2022, 46(3): 390−396Xu Liang-Gang, Shi Lei, Chen Feng-Xiang, Wang Shi-Chun, Long Xin, Wang Di. Transmission line tower tilt detection algorithm based on laser point cloud. Laser Technology, 2022, 46(3): 390−396 [142] 应斌, 唐斌, 潘俊杰, 郭震. 基于YOLOv3的电力杆塔检测算法研究. 浙江电力, 2021, 40(5): 53−59Ying Bin, Tang Bin, Pan Jun-Jie, Guo Zhen. Research on a detection algorithm of power tower based on YOLOv3. Zhejiang Electric Power, 2021, 40(5): 53−59 [143] 郝美. 输电线路覆冰在线监测的关键技术. 电子技术, 2020, 49(3): 90−91Hao Mei. Key of icing online monitoring for transmission line. Electronic Technology, 2020, 49(3): 90−91 [144] Huang T T, Liu Z, Chen X W, Bai X. EPNet: Enhancing point features with image semantics for 3D object detection. In: Proceedings of the 16th European Conference on Computer Vision (ECCV). Glasgow, UK: Springer, 2020. 35−52 [145] 安秋娥. 设备台帐与备件管理. 化工设备与防腐蚀, 1999(4): 27−28, 62An Qiu-E. Equipment ledger and spare parts management. Chemical Equipment and Anticorrosion, 1999(4): 27−28, 62 期刊类型引用(1)
1. 张子倩. 电力工程中的电力自动化技术及其应用研究——以南方某城市新区的220kV变电工程为例. 生态与资源. 2024(11): 108-110 .  百度学术
百度学术其他类型引用(0)
-

 下载:
下载:









计量
- 文章访问数: 1886
- HTML全文浏览量: 446
- PDF下载量: 245
- 被引次数: 1
