

-
摘要: 自1982年著名的Hopfield神经网络问世以来, 神经网络的分岔动力学受到了学术界的广泛关注. 首先, 回顾四类经典神经网络的数学模型和它们在各个领域的应用. 接着, 综述近三十年来关于整数阶神经网络(Integer-order neural networks, IONNs)、分数阶神经网络(Fractional-order neural networks, FONNs)、超数域神经网络(Supernumerary-domain neural networks, SDNNs)以及反应扩散神经网络(Reaction-diffusion neural networks, RDNNs)分岔动力学的相关研究成果. 分析诸多组合因素, 包括节点规模、耦合情形、拓扑结构、系统阶次、复值、四元数、八元数、扩散、时滞、随机性、脉冲、忆阻、激活函数等对神经网络分岔动力学的影响, 并展示神经网络在多个领域的广泛应用. 最后, 对神经网络分岔动力学所面临的挑战以及未来的研究方向进行总结和展望.Abstract: Since the introduction of the renowned Hopfield neural network in 1982, the bifurcation dynamics of neural networks has garnered significant academic attention. Firstly, an overview of the mathematical models of four types of classical neural networks and their applications in various fields is provided. Subsequently, the research results on the bifurcation dynamics of integer-order neural networks (IONNs), fractional-order neural networks (FONNs), supernumerary-domain neural networks (SDNNs), and reaction-diffusion neural networks (RDNNs) in the past three decades are summarized. The effects of various combinations of factors, including node size, coupling, topology, system order, complex value, quaternion, octonion, diffusion, time delay, stochasticity, impulse, memristor, and activation function, on the bifurcation dynamics of neural networks are analyzed, and the wide applications of neural networks in various fields are also demonstrated. Finally, the challenges and potential research directions concerning neural network bifurcation dynamics are summarized and prospected.
-
Key words:
- Neural networks /
- time delay /
- nonlinear dynamics /
- stability /
- bifurcation /
- periodicity /
- chaos
-
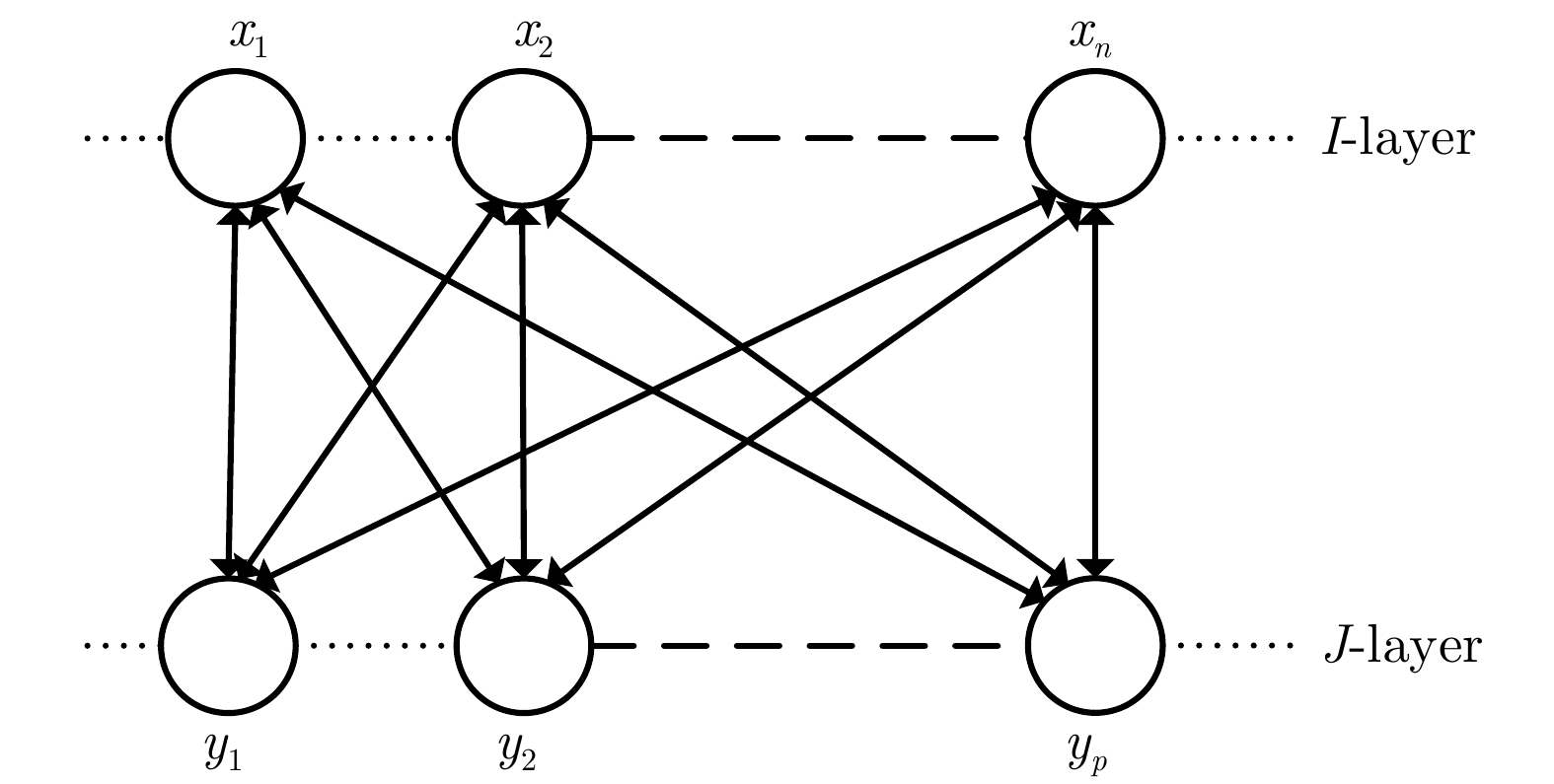
图 3 双向联想记忆神经网络拓扑图
Fig. 3 Topology of the bidirectional associative memory neural network
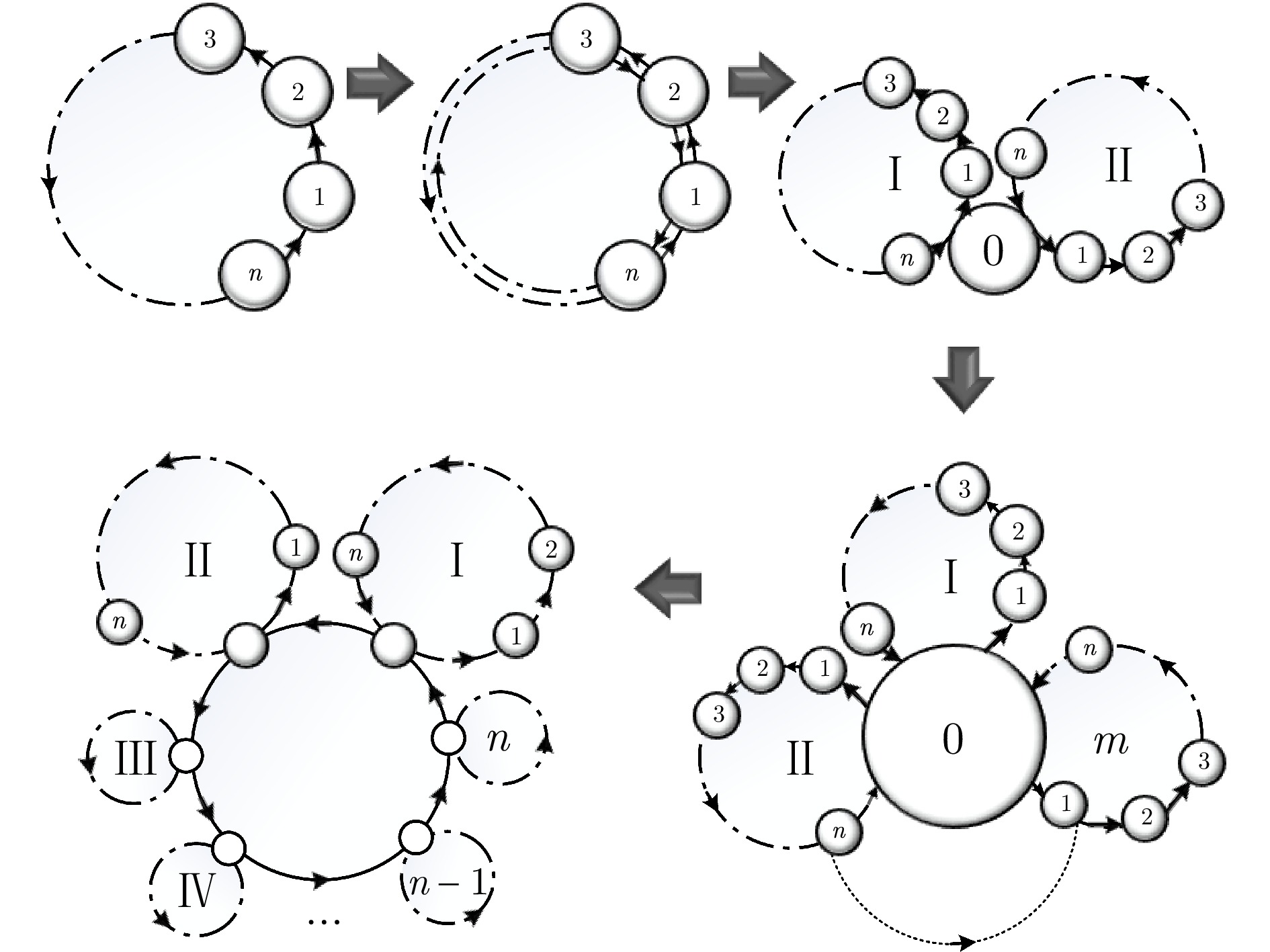
图 4 高维耦合下环型拓扑神经网络的发展历程
Fig. 4 Development of ring topology neural networks under high-dimensional coupling
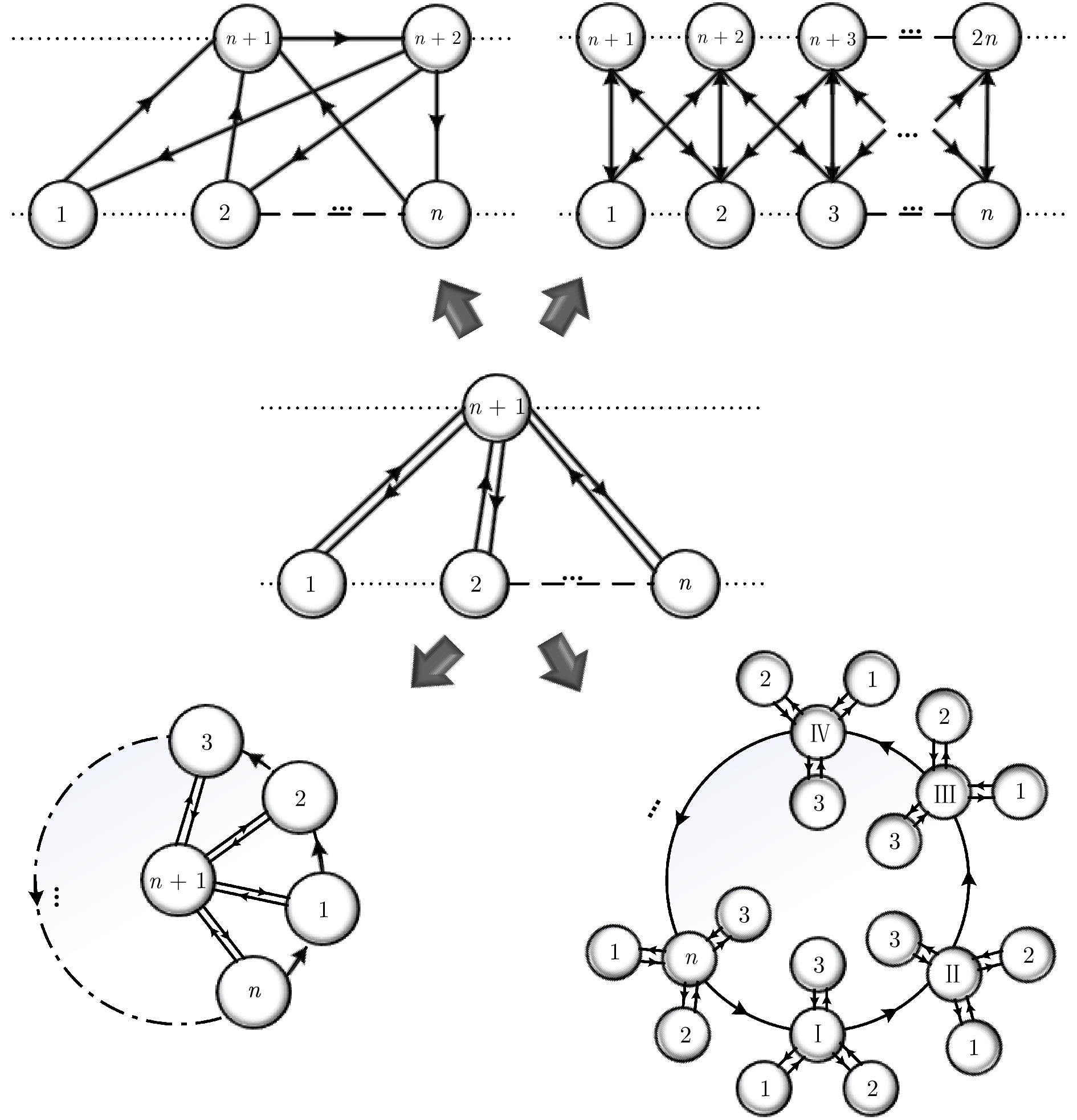
图 5 高维耦合下混合型拓扑神经网络的发展历程
Fig. 5 Development of hybrid topology neural networks under high-dimensional coupling
表 1 神经网络模型分类
Table 1 Classification for neural network models
神经网络类型 具体分类 代表性文献 应用领域 特点 IONNs 少节点全连接 [20, 34−35] 嵌入式系统
实时系统
边缘计算
低功耗设备结构简单, 计算速度较快
适用于低功耗、资源受限的实时系统
灵活性不足、精度不高、适用范围受限少节点非全连接 [41, 45] 多节点Ring [70−71, 77] 多节点Star [26, 78−79] 多节点Hybrid [82−83] FONNs 少节点耦合 [98−99, 101] 信号处理
动态系统建模
时间序列预测具有记忆和遗传特性、适用于非平稳信号处理
适用于建模复杂的非线性系统和时间序列数据
计算复杂度较高、训练过程比较困难高维耦合 [75, 81, 104] SDNNs CVNNs [108, 122, 124] 信号处理
通信系统
量子计算能够更好地处理复数数据、提高数据表示能力
训练复杂度较高、需要特殊的数学处理技巧QVNNs [125, 127] OVNNs [134−135] RDNNs 少节点耦合 [150, 156−157] 模式生成
自组织系统模拟能够模拟物理世界中各类反应扩散过程
计算复杂度较高、训练过程困难高维耦合 [158−160]  下载: 导出CSV
下载: 导出CSV
-
[1] 蒲慕明, 徐波, 谭铁牛. 脑科学与类脑研究概述. 中国科学院院刊, 2016, 31(7): 725−736Poo Mu-Ming, Xu Bo, Tan Tie-Niu. Brain science and brain-inspired intelligence technology——An overview. Bulletin of Chinese Academy of Sciences, 2016, 31(7): 725−736 [2] 黄立宏, 李雪梅. 细胞神经网络动力学. 北京: 科学出版社, 2007. 1–12Huang Li-Hong, Li Xue-Mei. Cellular Neural Network Dynamics. Beijing: Science Press, 2007. 1–12 [3] Liu S B, Li J, Lin Q Z, Tian Y, Tan K C. Learning to accelerate evolutionary search for large-scale multiobjective optimization. IEEE Transactions on Evolutionary Computation, 2023, 27(1): 67−81 doi: 10.1109/TEVC.2022.3155593 [4] Dong Y N, Liu Q W, Du B, Zhang L P. Weighted feature fusion of convolutional neural network and graph attention network for hyperspectral image classification. IEEE Transactions on Image Processing, 2022, 31: 1559−1572 doi: 10.1109/TIP.2022.3144017 [5] Bianchi F M, Grattarola D, Livi L, Alippi C. Graph neural networks with convolutional ARMA filters. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(7): 3496−3507 [6] Lyu Z Y, Wu Y, Lai J J, Yang M, Li C M, Zhou W. Knowledge enhanced graph neural networks for explainable recommendation. IEEE Transactions on Knowledge and Data Engineering, 2023, 35(5): 4954−4968 [7] Kong F H, Li J Q, Jiang B, Wang H H, Song H B. Integrated generative model for industrial anomaly detection via bidirectional LSTM and attention mechanism. IEEE Transactions on Industrial Informatics, 2023, 19(1): 541−550 doi: 10.1109/TII.2021.3078192 [8] Yin J B, Shen J B, Gao X, Crandall D J, Yang R G. Graph neural network and spatiotemporal transformer attention for 3D video object detection from point clouds. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(8): 9822−9835 doi: 10.1109/TPAMI.2021.3125981 [9] 张驰, 郭媛, 黎明. 人工神经网络模型发展及应用综述. 计算机工程与应用, 2021, 57(11): 57−69Zhang Chi, Guo Yuan, Li Ming. Review of development and application of artificial neural network models. Computer Engineering and Applications, 2021, 57(11): 57−69 [10] 韩力群. 人工神经网络理论、设计及应用. 第2版. 北京: 化学工业出版社, 2007. 13–15Han Li-Qun. Artificial Neural Network Theory, Design and Application (Second edition). Beijing: Chemical Industry Press, 2007. 13–15 [11] 徐健学, 陈永红, 蒋耀林. 人工神经网络非线性动力学及应用. 力学进展, 1998, 28(2): 145−162Xu Jian-Xue, Chen Yong-Hong, Jiang Yao-Lin. Nonlinear dynamics of artificial neural networks and applications. Advances in Mechanics, 1998, 28(2): 145−162 [12] 张化光. 递归时滞神经网络的综合分析与动态特性研究. 北京: 科学出版社, 2008. 7–19Zhang Hua-Guang. Comprehensive Analysis and Dynamic Characterization of Recurrent Time Delay Neural Networks. Beijing: Science Press, 2008. 7–19 [13] 王占山. 复杂神经动力网络的稳定性和同步性. 北京: 科学出版社, 2014. 1–24Wang Zhan-Shan. Stability and Synchronization of Complex Neurodynamic Networks. Beijing: Science Press, 2014. 1–24 [14] Hale J K. Theory of Functional Differential Equations. New York: Springer, 1977. 1–10 [15] Hassard B D, Kazarinoff N D, Wan Y H. Theory and Applications of Hopf Bifurcation. Cambridge: Cambridge University Press, 1981. 1–13 [16] Kuznetsov Y A. Elements of Applied Bifurcation Theory. New York: Springer, 1998. 57–62 [17] Wang H O, Abed E H. Bifurcation control of a chaotic system. Automatica, 1995, 31(9): 1213−1226 doi: 10.1016/0005-1098(94)00146-A [18] Tesi A, Abed E H, Genesio R, Wang H O. Harmonic balance analysis of period-doubling bifurcations with implications for control of nonlinear dynamics. Automatica, 1996, 32(9): 1255−1271 doi: 10.1016/0005-1098(96)00065-9 [19] 曹奔, 关利南, 古华光. 兴奋性作用诱发神经簇放电个数不增反降的分岔机制. 物理学报, 2018, 67(24): Article No. 240502 doi: 10.7498/aps.67.20181675Cao Ben, Guan Li-Nan, Gu Hua-Guang. Bifurcation mechanism of not increase but decrease of spike number within a neural burst induced by excitatory effect. Acta Physica Sinica, 2018, 67(24): Article No. 240502 doi: 10.7498/aps.67.20181675 [20] Bélair J, Campbell S A, van den Driessche P. Frustration, stability, and delay-induced oscillations in a neural network model. SIAM Journal on Applied Mathematics, 1996, 56(1): 245−255 doi: 10.1137/S0036139994274526 [21] Hopfield J J. Neural networks and physical systems with emergent collective computational abilities. Proceedings of the National Academy of Sciences of the United States of America, 1982, 79(8): 2554−2558 [22] Hopfield J J. Neurons with graded response have collective computational properties like those of two-state neurons. Proceedings of the National Academy of Sciences of the United States of America, 1984, 81(10): 3088−3092 [23] Marcus C M, Westervelt R M. Stability of analog neural networks with delay. Physical Review A, 1989, 39(1): 347−359 doi: 10.1103/PhysRevA.39.347 [24] Chua L O, Yang L. Cellular neural networks: Theory. IEEE Transactions on Circuits and Systems, 1988, 35(10): 1257−1272 doi: 10.1109/31.7600 [25] Chua L O, Yang L. Cellular neural networks: Applications. IEEE Transactions on Circuits and Systems, 1988, 35(10): 1273−1290 doi: 10.1109/31.7601 [26] Kosko B. Adaptive bidirectional associative memories. Applied Optics, 1987, 26(23): 4947−4960 doi: 10.1364/AO.26.004947 [27] Du S Z, Chen Z Q, Yuan Z Z, Zhang X H. Sensitivity to noise in bidirectional associative memory (BAM). IEEE Transactions on Neural Networks, 2005, 16(4): 887−898 doi: 10.1109/TNN.2005.849832 [28] Cohen M A, Grossberg S. Absolute stability of global pattern formation and parallel memory storage by competitive neural networks. IEEE Transactions on Systems, Man, and Cybernetics, 1983, SMC-13(5): 815−826 doi: 10.1109/TSMC.1983.6313075 [29] 王小平, 沈轶, 吴计生, 孙军伟, 李薇. 忆阻及其应用研究综述. 自动化学报, 2013, 39(8): 1170−1184Wang Xiao-Ping, Shen Yi, Wu Ji-Sheng, Sun Jun-Wei, Li Wei. Review on memristor and its applications. Acta Automatica Sinica, 2013, 39(8): 1170−1184 [30] 章联生, 金耀初, 宋永端. 时滞忆阻神经网络动力学分析与控制综述. 自动化学报, 2021, 47(4): 765−779Zhang Lian-Sheng, Jin Yao-Chu, Song Yong-Duan. An overview of dynamics analysis and control of memristive neural networks with delays. Acta Automatica Sinica, 2021, 47(4): 765−779 [31] Lin H R, Wang C H, Cui L, Sun Y C, Zhang X, Yao W. Hyperchaotic memristive ring neural network and application in medical image encryption. Nonlinear Dynamics, 2022, 110(1): 841−855 doi: 10.1007/s11071-022-07630-0 [32] Lin H R, Wang C H, Cui L, Sun Y C, Xu C, Yu F. Brain-like initial-boosted hyperchaos and application in biomedical image encryption. IEEE Transactions on Industrial Informatics, 2022, 18(12): 8839−8850 doi: 10.1109/TII.2022.3155599 [33] Ma T, Mou J, Yan H Z, Cao Y H. A new class of Hopfield neural network with double memristive synapses and its DSP implementation. The European Physical Journal Plus, 2022, 137(10): Article No. 1135 doi: 10.1140/epjp/s13360-022-03353-8 [34] Zou F, Nossek J A. Bifurcation and chaos in cellular neural networks. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 1993, 40(3): 166−173 doi: 10.1109/81.222797 [35] di Marco M, Tesi A, Forti M. Bifurcations and oscillatory behavior in a class of competitive cellular neural networks. International Journal of Bifurcation and Chaos, 2000, 10(6): 1267−1293 doi: 10.1142/S0218127400000852 [36] Olien L, Bélair J. Bifurcations, stability, and monotonicity properties of a delayed neural network model. Physica D: Nonlinear Phenomena, 1997, 102(3−4): 349−363 doi: 10.1016/S0167-2789(96)00215-1 [37] Wei J J, Ruan S G. Stability and bifurcation in a neural network model with two delays. Physica D: Nonlinear Phenomena, 1999, 130(3−4): 255−272 doi: 10.1016/S0167-2789(99)00009-3 [38] Wei J J, Velarde M G. Bifurcation analysis and existence of periodic solutions in a simple neural network with delays. Chaos, 2004, 14(3): 940−953 doi: 10.1063/1.1768111 [39] Liao X F, Wu Z F, Yu J B. Stability switches and bifurcation analysis of a neural network with continuously delay. IEEE Transactions on Systems, Man, and Cybernetics——Part A: Systems and Humans, 1999, 29(6): 692−696 doi: 10.1109/3468.798076 [40] Liao X F, Wong K W, Wu Z F. Bifurcation analysis on a two-neuron system with distributed delays. Physica D: Nonlinear Phenomena, 2001, 149(1−2): 123−141 doi: 10.1016/S0167-2789(00)00197-4 [41] Song Y L, Han M A, Wei J J. Stability and Hopf bifurcation analysis on a simplified BAM neural network with delays. Physica D: Nonlinear Phenomena, 2005, 200(3−4): 185−204 doi: 10.1016/j.physd.2004.10.010 [42] Yan X P. Bifurcation analysis in a simplified tri-neuron BAM network model with multiple delays. Nonlinear Analysis: Real World Applications, 2008, 9(3): 963−976 doi: 10.1016/j.nonrwa.2007.01.015 [43] Gupta P D D, Majee N C C, Roy A B B. Stability and Hopf-bifurcation analysis of delayed BAM neural network under dynamic thresholds. Nonlinear Analysis: Modelling and Control, 2009, 14(4): 435−461 doi: 10.15388/NA.2009.14.4.14466 [44] Xu C J, Tang X H, Liao M X. Frequency domain analysis for bifurcation in a simplified tri-neuron BAM network model with two delays. Neural Networks, 2010, 23(7): 872−880 doi: 10.1016/j.neunet.2010.03.004 [45] Cao J D, Xiao M. Stability and Hopf bifurcation in a simplified BAM neural network with two time delays. IEEE Transactions on Neural Networks, 2007, 18(2): 416−430 doi: 10.1109/TNN.2006.886358 [46] Yu W W, Cao J D. Stability and Hopf bifurcation analysis on a four-neuron BAM neural network with time delays. Physics Letters A, 2006, 351(1−2): 64−78 doi: 10.1016/j.physleta.2005.10.056 [47] Liu X. Zero singularity of codimension two or three in a four-neuron BAM neural network model with multiple delays. Nonlinear Dynamics, 2014, 77(4): 1783−1794 doi: 10.1007/s11071-014-1417-y [48] Yang Y, Ye J. Stability and bifurcation in a simplified five-neuron BAM neural network with delays. Chaos, Solitons & Fractals, 2009, 42(4): 2357−2363 [49] Ge J H, Xu J. Synchronization and synchronized periodic solution in a simplified five-neuron BAM neural network with delays. Neurocomputing, 2011, 74(6): 993−999 doi: 10.1016/j.neucom.2010.11.017 [50] Xu C J, Liao M X, Li P L, Guo Y. Bifurcation analysis for simplified five-neuron bidirectional associative memory neural networks with four delays. Neural Processing Letters, 2019, 50(3): 2219−2245 doi: 10.1007/s11063-019-10006-y [51] Xu C J, Tang X H, Liao M X. Stability and bifurcation analysis of a six-neuron BAM neural network model with discrete delays. Neurocomputing, 2011, 74(5): 689−707 doi: 10.1016/j.neucom.2010.09.002 [52] Liu Y W, Li S S, Liu Z R, Wang R Q. High codimensional bifurcation analysis to a six-neuron BAM neural network. Cognitive Neurodynamics, 2016, 10(2): 149−164 doi: 10.1007/s11571-015-9364-y [53] Wang L, Xiao M, Zhou S, Song Y R, Cao J D. Stability and Hopf bifurcation of nearest-neighbor coupled neural networks with delays. Journal of Computational and Nonlinear Dynamics, 2020, 15(11): Article No. 111005 doi: 10.1115/1.4048366 [54] Mao X C, Wang Z H. Stability switches and bifurcation in a system of four coupled neural networks with multiple time delays. Nonlinear Dynamics, 2015, 82(3): 1551−1567 doi: 10.1007/s11071-015-2260-5 [55] Cheng Z S, Xie K H, Wang T S, Cao J D. Stability and Hopf bifurcation of three-triangle neural networks with delays. Neurocomputing, 2018, 322: 206−215 doi: 10.1016/j.neucom.2018.09.063 [56] Baldi P, Atiya A F. How delays affect neural dynamics and learning. IEEE Transactions on Neural Networks, 1994, 5(4): 612−621 doi: 10.1109/72.298231 [57] Campbell S A. Stability and bifurcation of a simple neural network with multiple time delays. Fields Institute Communications, 1999, 21: 65−78 [58] Berns D W, Moiola J L, Chen G R. Predicting period-doubling bifurcations and multiple oscillations in nonlinear time-delayed feedback systems. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 1998, 45(7): 759−763 doi: 10.1109/81.703844 [59] Chen Y M, Wu J H. Slowly oscillating periodic solutions for a delayed frustrated network of two neurons. Journal of Mathematical Analysis and Applications, 2001, 259(1): 188−208 doi: 10.1006/jmaa.2000.7410 [60] Faria T. On a planar system modelling a neuron network with memory. Journal of Differential Equations, 2000, 168(1): 129−149 doi: 10.1006/jdeq.2000.3881 [61] Giannakopoulos F, Zapp A. Bifurcations in a planar system of differential delay equations modeling neural activity. Physica D: Nonlinear Phenomena, 2001, 159(3−4): 215−232 doi: 10.1016/S0167-2789(01)00337-2 [62] Liao X F, Li S W, Chen G R. Bifurcation analysis on a two-neuron system with distributed delays in the frequency domain. Neural Networks, 2004, 17(4): 545−561 doi: 10.1016/j.neunet.2003.10.001 [63] Ruan S G, Wei J J. Periodic solutions of planar systems with two delays. Proceedings of the Royal Society of Edinburgh Section A: Mathematics, 1999, 129(5): 1017−1032 doi: 10.1017/S0308210500031061 [64] Ruan S G, Filfil R S. Dynamics of a two-neuron system with discrete and distributed delays. Physica D: Nonlinear Phenomena, 2004, 191(3−4): 323−342 doi: 10.1016/j.physd.2003.12.004 [65] 魏俊杰, 张春蕊, 李秀玲. 具时滞的二维神经网络模型的分支. 应用数学和力学, 2005, 26(2): 193−200Wei Jun-Jie, Zhang Chun-Rui, Li Xiu-Ling. Bifurcation in a two-dimensional neural network model with delay. Applied Mathematics and Mechanics, 2005, 26(2): 193−200 [66] Zhang Z Q, Guo S J. Periodic oscillation for a three-neuron network with delays. Applied Mathematics Letters, 2003, 16(8): 1251−1255 doi: 10.1016/S0893-9659(03)90125-X [67] Campbell S A, Ncube I, Wu J. Multistability and stable asynchronous periodic oscillations in a multiple-delayed neural system. Physica D: Nonlinear Phenomena, 2006, 214(2): 101−119 doi: 10.1016/j.physd.2005.12.008 [68] Yan X P. Hopf bifurcation and stability for a delayed tri-neuron network model. Journal of Computational and Applied Mathematics, 2006, 196(2): 579−595 doi: 10.1016/j.cam.2005.10.012 [69] Fan D J, Wei J J. Hopf bifurcation and analysis in a tri-neuron network with time delay. Nonlinear Analysis: Real World Applications, 2008, 9(1): 9−25 doi: 10.1016/j.nonrwa.2006.08.008 [70] Wei J J, Zhang C R. Bifurcation analysis of a class of neural networks with delays. Nonlinear Analysis: Real World Applications, 2008, 9(5): 2234−2252 doi: 10.1016/j.nonrwa.2007.08.008 [71] Tao B B, Xiao M, Zheng W X, Cao J D, Tang J W. Dynamics analysis and design for a bidirectional super-ring-shaped neural network with $n $ neurons and multiple delays. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(7): 2978−2992 doi: 10.1109/TNNLS.2020.3009166 [72] Du X Y, Xiao M, Ding J, He J J, Yao Y, Cao J D. Bifurcation-driven tipping in a novel bicyclic crossed neural network with multiple time delays. Cognitive Computation, 2024, 16(1): 278−292 doi: 10.1007/s12559-023-10199-4 [73] Xing R T, Xiao M, Zhang Y Z, Qiu J L. Stability and Hopf bifurcation analysis of an ( $n+m $)-neuron double-ring neural network model with multiple time delays. Journal of Systems Science and Complexity, 2022, 35(1): 159−178 doi: 10.1007/s11424-021-0108-2 [74] Zhang Y Z, Xiao M, Zheng W X, Cao J D. Large-scale neural networks with asymmetrical three-ring structure: Stability, nonlinear oscillations, and Hopf bifurcation. IEEE Transactions on Cybernetics, 2022, 52(9): 9893−9904 doi: 10.1109/TCYB.2021.3109566 [75] Zhang Y Z, Xiao M, Cao J D, Zheng W X. Dynamical bifurcation of large-scale-delayed fractional-order neural networks with hub structure and multiple rings. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(3): 1731−1743 doi: 10.1109/TSMC.2020.3037094 [76] Zhou S, Xiao M, Wang L, Cheng Z S. Bifurcation and oscillations of a multi-ring coupling neural network with discrete delays. Cognitive Computation, 2021, 13(5): 1233−1245 doi: 10.1007/s12559-021-09920-y [77] 张跃中, 肖敏, 王璐, 徐丰羽. 大规模超环神经网络分岔动力学. 自动化学报, 2022, 48(4): 1129−1136Zhang Yue-Zhong, Xiao Min, Wang Lu, Xu Feng-Yu. Bifurcation dynamics of large-scale neural networks composed of super multi-ring networks. Acta Automatica Sinica, 2022, 48(4): 1129−1136 [78] Xiao M, Zheng W X, Cao J D. Hopf bifurcation of an ( $n+1 $)-neuron bidirectional associative memory neural network model with delays. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(1): 118−132 doi: 10.1109/TNNLS.2012.2224123 [79] Xu W Y, Cao J D, Xiao M, Ho D W C, Wen G H. A new framework for analysis on stability and bifurcation in a class of neural networks with discrete and distributed delays. IEEE Transactions on Cybernetics, 2015, 45(10): 2224−2236 doi: 10.1109/TCYB.2014.2367591 [80] Wang T S, Wang Y, Cheng Z S. Stability and Hopf bifurcation analysis of a general tri-diagonal BAM neural network with delays. Neural Processing Letters, 2021, 53(6): 4571−4592 doi: 10.1007/s11063-021-10613-8 [81] Chen J, Xiao M, Wan Y H, Huang C D, Xu F Y. Dynamical bifurcation for a class of large-scale fractional delayed neural networks with complex ring-hub structure and hybrid coupling. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(5): 2659−2669 doi: 10.1109/TNNLS.2021.3107330 [82] Lu Y X, Xiao M, He J J, Wang Z X. Stability and bifurcation exploration of delayed neural networks with radial-ring configuration and bidirectional coupling. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(8): 10326−10337 [83] 陶斌斌, 肖敏, 蒋国平. 链式神经网络动力学及其与环状结构、星型结构对比分析. 控制理论与应用, 2024, 41(9): 1588−1597Tao Bin-Bin, Xiao Min, Jiang Guo-Ping. Dynamics of chain-structure neural networks and its comparative analysis with different structures of ring and star. Control Theory & Applications, 2024, 41(9): 1588−1597 [84] Yu J, Hu C, Jiang H J, Fan X L. Projective synchronization for fractional neural networks. Neural Networks, 2014, 49: 87−95 doi: 10.1016/j.neunet.2013.10.002 [85] Xiao M, Zheng W X, Jiang G P, Cao J D. Stability and bifurcation of delayed fractional-order dual congestion control algorithms. IEEE Transactions on Automatic Control, 2017, 62(9): 4819−4826 doi: 10.1109/TAC.2017.2688583 [86] Xiao M, Jiang G P, Cao J D, Zheng W X. Local bifurcation analysis of a delayed fractional-order dynamic model of dual congestion control algorithms. IEEE/CAA Journal of Automatica Sinica, 2017, 4(2): 361−369 doi: 10.1109/JAS.2016.7510151 [87] Liu H, Li S G, Wang H X, Sun Y G. Adaptive fuzzy control for a class of unknown fractional-order neural networks subject to input nonlinearities and dead-zones. Information Sciences, 2018, 454−455: 30−45 doi: 10.1016/j.ins.2018.04.069 [88] Xiao M, Tao B B, Zheng W X, Jiang G P. Fractional-order PID controller synthesis for bifurcation of fractional-order small-world networks. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(7): 4334−4346 doi: 10.1109/TSMC.2019.2933570 [89] 陆云翔, 肖敏, 陶斌斌, 丁洁, 陈实. 独立非交叉传播的分数阶生物竞争网络Hopf分岔. 复杂系统与复杂性科学, 2022, 19(1): 1−11Lu Yun-Xiang, Xiao Min, Tao Bin-Bin, Ding Jie, Chen Shi. Hopf bifurcation of biological competition network with independent non-cross propagation. Complex Systems and Complexity Science, 2022, 19(1): 1−11 [90] Lundstrom B N, Higgs M H, Spain W J, Fairhall A L. Fractional differentiation by neocortical pyramidal neurons. Nature Neuroscience, 2008, 11(11): 1335−1342 doi: 10.1038/nn.2212 [91] Iqbal A, Khan M A, Ullah S, Chu Y M. Some new Hermite-Hadamard-type inequalities associated with conformable fractional integrals and their applications. Journal of Function Spaces, 2020, 2020: Article No. 9845407 [92] Fei J T, Wang H, Fang Y M. Novel neural network fractional-order sliding-mode control with application to active power filter. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(6): 3508−3518 doi: 10.1109/TSMC.2021.3071360 [93] Yu F, Yu Q L, Chen H F, Kong X X, Mokbel A A M, Cai S, et al. Dynamic analysis and audio encryption application in IoT of a multi-scroll fractional-order memristive Hopfield neural network. Fractal and Fractional, 2022, 6(7): Article No. 370 doi: 10.3390/fractalfract6070370 [94] Arena P, Fortuna L, Porto D. Chaotic behavior in noninteger-order cellular neural networks. Physical Review E, 2000, 61(1): 776−781 doi: 10.1103/PhysRevE.61.776 [95] Matsuzaki T, Nakagawa M. A chaos neuron model with fractional differential equation. Journal of the Physical Society of Japan, 2003, 72(10): 2678−2684 doi: 10.1143/JPSJ.72.2678 [96] Petras I. A note on the fractional-order cellular neural networks. In: Proceedings of the IEEE International Joint Conference on Neural Network. Vancouver, Canada: IEEE, 2006. 1021–1024 [97] Boroomand A, Menhaj M B. Fractional-order Hopfield neural networks. In: Proceedings of the 15th International Conference on Advances in Neuro-Information Processing. Auckland, New Zeeland: Springer, 2009. 883–890 [98] Kaslik E, Sivasundaram S. Nonlinear dynamics and chaos in fractional-order neural networks. Neural Networks, 2012, 32: 245−256 doi: 10.1016/j.neunet.2012.02.030 [99] Xiao M, Zheng W X, Jiang G P, Cao J D. Undamped oscillations generated by Hopf bifurcations in fractional-order recurrent neural networks with Caputo derivative. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(12): 3201−3214 doi: 10.1109/TNNLS.2015.2425734 [100] Huang C D, Cao J D, Ma Z J. Delay-induced bifurcation in a tri-neuron fractional neural network. International Journal of Systems Science, 2016, 47(15): 3668−3677 doi: 10.1080/00207721.2015.1110641 [101] Huang C D, Wang H N, Cao J D. Fractional order-induced bifurcations in a delayed neural network with three neurons. Chaos, 2023, 33(3): Article No. 033143 [102] Xu C J, Liu Z X, Liao M X, Li P L, Xiao Q M, Yuan S. Fractional-order bidirectional associate memory (BAM) neural networks with multiple delays: The case of Hopf bifurcation. Mathematics and Computers in Simulation, 2021, 182: 471−494 doi: 10.1016/j.matcom.2020.11.023 [103] Li B B, Liao M X, Xu C J, Li W N. Hopf bifurcation analysis of a delayed fractional BAM neural network model with incommensurate orders. Neural Processing Letters, 2023, 55(5): 5905−5921 doi: 10.1007/s11063-022-11118-8 [104] Huang C D, Cao J D, Xiao M, Alsaedi A, Hayat T. Effects of time delays on stability and Hopf bifurcation in a fractional ring-structured network with arbitrary neurons. Communications in Nonlinear Science and Numerical Simulation, 2018, 57: 1−13 doi: 10.1016/j.cnsns.2017.09.005 [105] Wang Y L, Cao J D, Huang C D. Exploration of bifurcation for a fractional-order BAM neural network with $n+2 $ neurons and mixed time delays. Chaos, Solitons & Fractals, 2022, 159: Article no. 112117 [106] Amilia S, Sulistiyo M D, Dayawati R N. Face image-based gender recognition using complex-valued neural network. In: Proceedings of the 3rd International Conference on Information and Communication Technology (ICoICT). Nusa Dua, Indonesia: IEEE, 2015. 201–206 [107] Hayakawa D, Masuko T, Fujimura H. Applying complex-valued neural networks to acoustic modeling for speech recognition. In: Proceedings of the Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC). Honolulu, USA: IEEE, 2018. 1725–1731 [108] Lee C, Hasegawa H, Gao S C. Complex-valued neural networks: A comprehensive survey. IEEE/CAA Journal of Automatica Sinica, 2022, 9(8): 1406−1426 doi: 10.1109/JAS.2022.105743 [109] Ma W Y, Li C P, Wu Y J, Wu Y Q. Adaptive synchronization of fractional neural networks with unknown parameters and time delays. Entropy, 2014, 16(12): 6286−6299 doi: 10.3390/e16126286 [110] Li L, Wang Z, Lu J W, Li Y X. Adaptive synchronization of fractional-order complex-valued neural networks with discrete and distributed delays. Entropy, 2018, 20(2): Article No. 124 doi: 10.3390/e20020124 [111] Aizenberg I. Complex-Valued Neural Networks With Multi-Valued Neurons. Berlin: Springer, 2011. 1–53 [112] Nitta T. Solving the XOR problem and the detection of symmetry using a single complex-valued neuron. Neural Networks, 2003, 16(8): 1101−1105 doi: 10.1016/S0893-6080(03)00168-0 [113] Zhang Z M, Wang H P, Xu F, Jin Y Q. Complex-valued convolutional neural network and its application in polarimetric SAR image classification. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(12): 7177−7188 [114] Lin Y, Tu Y, Dou Z, Chen L, Mao S W. Contour stella image and deep learning for signal recognition in the physical layer. IEEE Transactions on Cognitive Communications and Networking, 2021, 7(1): 34−36 [115] Zhang Z M, Lei Z Y, Zhou M C, Hasegawa H, Gao S C. Complex-valued convolutional gated recurrent neural network for ultrasound beamforming. IEEE Transactions on Neural Networks and Learning Systems, DOI: 10.1109/TNNLS.2024.3384314 [116] Zhou W, Zurada J M. Discrete-time recurrent neural networks with complex-valued linear threshold neurons. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2009, 56(8): 669−673 doi: 10.1109/TCSII.2009.2025625 [117] Hu J, Wang J. Global stability of complex-valued recurrent neural networks with time-delays. IEEE Transactions on Neural Networks and Learning Systems, 2012, 23(6): 853−865 doi: 10.1109/TNNLS.2012.2195028 [118] Xu X H, Zhang J Y, Shi J Z. Exponential stability of complex-valued neural networks with mixed delays. Neurocomputing, 2014, 128: 483−490 doi: 10.1016/j.neucom.2013.08.014 [119] Dong T, Liao X F, Wang A J. Stability and Hopf bifurcation of a complex-valued neural network with two time delays. Nonlinear Dynamics, 2015, 82(1−2): 173−184 doi: 10.1007/s11071-015-2147-5 [120] Song Q K, Yan H, Zhao Z J, Liu Y R. Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects. Neural Networks, 2016, 79: 108−116 doi: 10.1016/j.neunet.2016.03.007 [121] Rakkiyappan R, Cao J D, Velmurugan G. Existence and uniform stability analysis of fractional-order complex-valued neural networks with time delays. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(1): 84−97 doi: 10.1109/TNNLS.2014.2311099 [122] Bao H B, Park J H, Cao J D. Synchronization of fractional-order complex-valued neural networks with time delay. Neural Networks, 2016, 81: 16−28 doi: 10.1016/j.neunet.2016.05.003 [123] Huang C D, Cao J D, Xiao M, Alsaedi A, Hayat T. Bifurcations in a delayed fractional complex-valued neural network. Applied Mathematics and Computation, 2017, 292: 210−227 doi: 10.1016/j.amc.2016.07.029 [124] Velmurugan G, Rakkiyappan R, Vembarasan V, Cao J D, Alsaedi A. Dissipativity and stability analysis of fractional-order complex-valued neural networks with time delay. Neural Networks, 2017, 86: 42−53 doi: 10.1016/j.neunet.2016.10.010 [125] Cao J D, Udhayakumar K, Rakkiyappan R, Li X D, Lu J Q. A comprehensive review of continuous-/discontinuous-time fractional-order multidimensional neural networks. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(9): 5476−5496 doi: 10.1109/TNNLS.2021.3129829 [126] Huang C D, Nie X B, Zhao X, Song Q K, Tu Z W, Xiao M, et al. Novel bifurcation results for a delayed fractional-order quaternion-valued neural network. Neural Networks, 2019, 117: 67−93 doi: 10.1016/j.neunet.2019.05.002 [127] Wei J M, Zhang Y A, Bao H. An exploration on adaptive iterative learning control for a class of commensurate high-order uncertain nonlinear fractional order systems. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2): 618−627 doi: 10.1109/JAS.2017.7510361 [128] Liu Y, Zhang D D, Lou J G, Lu J Q, Cao J D. Stability analysis of quaternion-valued neural networks: Decomposition and direct approaches. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(9): 4201−4211 doi: 10.1109/TNNLS.2017.2755697 [129] Adler S L, Finkelstein D R. Quaternionic quantum mechanics and quantum fields. Physics Today, 1996, 49(6): 58−60 [130] Ujang B C, Took C C, Mandic D P. Quaternion-valued nonlinear adaptive filtering. IEEE Transactions on Neural Networks, 2011, 22(8): 1193−1206 doi: 10.1109/TNN.2011.2157358 [131] Liu Y, Zhang D D, Lu J Q, Cao J D. μ-stability criteria for quaternion-valued neural networks with unbounded time-varying delays. Information Sciences, 2016, 360: 273−288 doi: 10.1016/j.ins.2016.04.033 [132] Chen X F, Li Z S, Song Q K, Hu J, Tan Y S. Robust stability analysis of quaternion-valued neural networks with time delays and parameter uncertainties. Neural Networks, 2017, 91: 55−65 doi: 10.1016/j.neunet.2017.04.006 [133] Chen X F, Song Q K. State estimation for quaternion-valued neural networks with multiple time delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(11): 2278−2287 doi: 10.1109/TSMC.2017.2776940 [134] Wu J S, Xu L, Wu F Z, Kong Y Y, Senhadji L, Shu H Z. Deep octonion networks. Neurocomputing, 2020, 397: 179−191 doi: 10.1016/j.neucom.2020.02.053 [135] Xiao J Y, Guo X, Li Y T, Wen S P. Further research on the problems of synchronization for fractional-order BAM neural networks in octonion-valued domain. Neural Processing Letters, 2023, 55(8): 11173−11208 doi: 10.1007/s11063-023-11371-5 [136] Sheng Y, Zhang H, Zeng Z G. Stability and robust stability of stochastic reaction-diffusion neural networks with infinite discrete and distributed delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(5): 1721−1732 doi: 10.1109/TSMC.2017.2783905 [137] Raza N, Arshed S, Bakar A, Shahzad A, Inc M. A numerical efficient splitting method for the solution of HIV time periodic reaction-diffusion model having spatial heterogeneity. Physica A: Statistical Mechanics and Its Applications, 2023, 609: Article No. 128385 doi: 10.1016/j.physa.2022.128385 [138] Lu Y X, Xiao M, He J J, Du X Y. A delayed eco-epidemiological competition network with reaction-diffusion terms: Tipping anticipation. Applied and Computational Mathematics, 2023, 22(2): 189−214 [139] Xiao M, Chen S, Zheng W X, Wang Z X, Lu Y X. Tipping point prediction and mechanism analysis of malware spreading in cyber-physical systems. Communications in Nonlinear Science and Numerical Simulation, 2023, 122: Article No. 107247 doi: 10.1016/j.cnsns.2023.107247 [140] Lu Y X, Xiao M, Huang C D, Cheng Z S, Wang Z X, Cao J D. Early warning of tipping in a chemical model with cross-diffusion via spatiotemporal pattern formation and transition. Chaos, 2023, 33(7): Article No. 073120 [141] Lin J Z, Xu R, Tian X H. Spatiotemporal dynamics in reaction-diffusion neural networks near a Turing-Hopf bifurcation point. International Journal of Bifurcation and Chaos, 2019, 29(11): Article No. 1950154 doi: 10.1142/S0218127419501542 [142] Chua L O, Goraş L. Turing patterns in cellular neural networks. International Journal of Electronics, 1995, 79(6): 719−736 doi: 10.1080/00207219508926307 [143] Goras L, Chua L O, Leenaerts D M W. Turing patterns in CNNs. I. Once over lightly. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 1995, 42(10): 602−611 doi: 10.1109/81.473567 [144] Nichol A Q, Dhariwal P. Improved denoising diffusion probabilistic models. In: Proceedings of the 38th International Conference on Machine Learning. PMLR, 2021. 8162–8171 [145] Dhariwal P, Nichol A. Diffusion models beat GANs on image synthesis. In: Proceedings of the 35th International Conference on Neural Information Processing Systems. ANIPS, 2021. 8780−8794 [146] Goras L, Chua L O. Turing patterns in CNNs. Ⅱ. Equations and behaviors. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 1995, 42(10): 612−626 doi: 10.1109/81.473568 [147] Goras L, Chua L O, Pivka L. Turing patterns in CNNs. Ⅲ. Computer simulation results. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 1995, 42(10): 627−637 doi: 10.1109/81.473569 [148] Bressloff P C, Folias S E. Front bifurcations in an excitatory neural network. SIAM Journal on Applied Mathematics, 2004, 65(1): 131−151 doi: 10.1137/S0036139903434481 [149] Gan Q T, Xu R. Stability and Hopf bifurcation of a delayed reaction-diffusion neural network. Mathematical Methods in the Applied Sciences, 2011, 34(12): 1450−1459 doi: 10.1002/mma.1454 [150] Zhao H Y, Yuan J L, Zhang X B. Stability and bifurcation analysis of reaction-diffusion neural networks with delays. Neurocomputing, 2015, 147: 280−290 doi: 10.1016/j.neucom.2014.06.065 [151] Zhao H Y, Huang X X, Zhang X B. Turing instability and pattern formation of neural networks with reaction-diffusion terms. Nonlinear Dynamics, 2014, 76(1): 115−124 doi: 10.1007/s11071-013-1114-2 [152] Lin J Z, Xu R, Tian X H. Pattern formation in reaction-diffusion neural networks with leakage delay. Journal of Applied Analysis & Computation, 2019, 9(6): 2224−2244 [153] Lin J Z, Xu R, Li L C. Turing-Hopf bifurcation of reaction-diffusion neural networks with leakage delay. Communications in Nonlinear Science and Numerical Simulation, 2020, 85: Article No. 105241 doi: 10.1016/j.cnsns.2020.105241 [154] Lin J Z, Li J P, Xu R. Turing instability and pattern formation of a fractional Hopfield reaction-diffusion neural network with transmission delay. Nonlinear Analysis: Modelling and Control, 2022, 27(5): 823−840 [155] Dong T, Xia L M. Spatial temporal dynamic of a coupled reaction-diffusion neural network with time delay. Cognitive Computation, 2019, 11(2): 212−226 doi: 10.1007/s12559-018-9618-1 [156] Tian X H, Xu R, Gan Q T. Hopf bifurcation analysis of a BAM neural network with multiple time delays and diffusion. Applied Mathematics and Computation, 2015, 266: 909−926 doi: 10.1016/j.amc.2015.06.009 [157] Dong T, Xiang W L, Huang T W, Li H Q. Pattern formation in a reaction-diffusion BAM neural network with time delay: (k1, k2) mode Hopf-zero bifurcation case. IEEE Transactionson Neural Networks and Learning Systems, 2022, 33(12): 7266−7276 doi: 10.1109/TNNLS.2021.3084693 [158] Chen J, Xiao M, Wu X Q, Wang Z X, Cao J D. Spatiotemporal dynamics on a class of ( $n+1 $)-dimensional reaction-diffusion neural networks with discrete delays and a conical structure. Chaos Solutions & Fractals, 2022, 164: Article No. 112675 [159] He J J, Xiao M, Zhao J, Wang Z X, Yao Y, Cao J D. Tree-structured neural networks: Spatiotemporal dynamics and optimal control. Neural Networks, 2023, 164: 395−407 doi: 10.1016/j.neunet.2023.04.039 [160] Lu Y X, Xiao M, Liang J L, Chen J, Lin J X, Wang Z X, et al. Spatiotemporal evolution of large-scale bidirectional associative memory neural networks with diffusion and delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(3): 1388−1400 doi: 10.1109/TSMC.2023.3326186 [161] Tian X H, Xu R. Stability and Hopf bifurcation of time fractional Cohen-Grossberg neural networks with diffusion and time delays in leakage terms. Neural Processing Letters, 2017, 45(2): 593−614 doi: 10.1007/s11063-016-9544-8 [162] Stamov G, Stamova I, Martynyuk A, Stamov T. Almost periodic dynamics in a new class of impulsive reaction-diffusion neural networks with fractional-like derivatives. Chaos, Solitons & Fractals, 2021, 143: Article No. 110647 -

 下载:
下载:

计量
- 文章访问数: 1204
- HTML全文浏览量: 1070
- PDF下载量: 269
- 被引次数: 0
