

-
摘要: 聚焦多机器人系统协同寻源问题, 即通过驱使多个机器人相互协同寻找未知环境中物理信号放射源的位置. 由于执行任务的机器人通常处于户外开放网络环境中, 攻击者在网络中生成的虚假数据注入攻击容易导致多机器人系统寻源任务的失败. 为在网络攻击情形下仍旧能够追寻到源点, 提出一种基于弹性向量趋同的多机器人系统协同多维寻源方法. 有别于现有文献在处理多维寻源时将向量分解成各个维度上的标量进而设计基于标量的弹性趋同协议, 所提出的多维寻源方法不仅能够有效抵御虚假数据注入攻击完成寻源任务, 而且其界定的安全区间相较于传统基于标量信息界定的安全区间更加严格和精准. 在假设f-局部有界(f-locally bounded) 虚假数据注入攻击模型下, 理论分析给出正常机器人在所设计的控制协议下追寻到源点的充分必要条件. 仿真结果表明, 该方法在分布式多机器人系统协作寻源和抵抗恶意攻击方面具有优越性.Abstract: This paper focuses on the cooperative source seeking problem of multi-robot system, that is, by driving multiple robots to cooperate with each other to seek the location of the physical signal emitter in the unknown environment. Due to the fact that robots executing tasks are usually in an outdoor open network environment, false data injection attacks generated by attackers can easily lead to the failure of source seeking tasks in multi-robot system. In order to still seek the source in the situation of network attacks, this paper proposes a cooperative multi-dimensional source seeking method for multi-robot system based on resilient vector convergence. Unlike existing literature that decomposes vectors into scalars on various dimensions when dealing with multi-dimensional source seeking, scalar based resilient convergence protocols are designed. The multi-dimensional source seeking method proposed in this paper not only effectively resists false data injection attacks, but also defines a more rigorous and accurate security interval compared to security intervals of traditional scalar information. Under the assumption of f-locally bounded false data injection attack model, theoretical analysis provides sufficient and necessary conditions for normal robots to seek the source point under the designed control protocol. The simulation results show that the proposed method has superiority in cooperative source seeking and resistance to false data injection attacks in distributed multi-robot system.
-
Key words:
- Multi-robot system /
- source seeking /
- cooperative control /
- network security /
- malicious node
-


图 2 环境中的机器人节点之间的通信关系和安全区域
Fig. 2 The communication relationship and safe area among the robot nodes in the environment
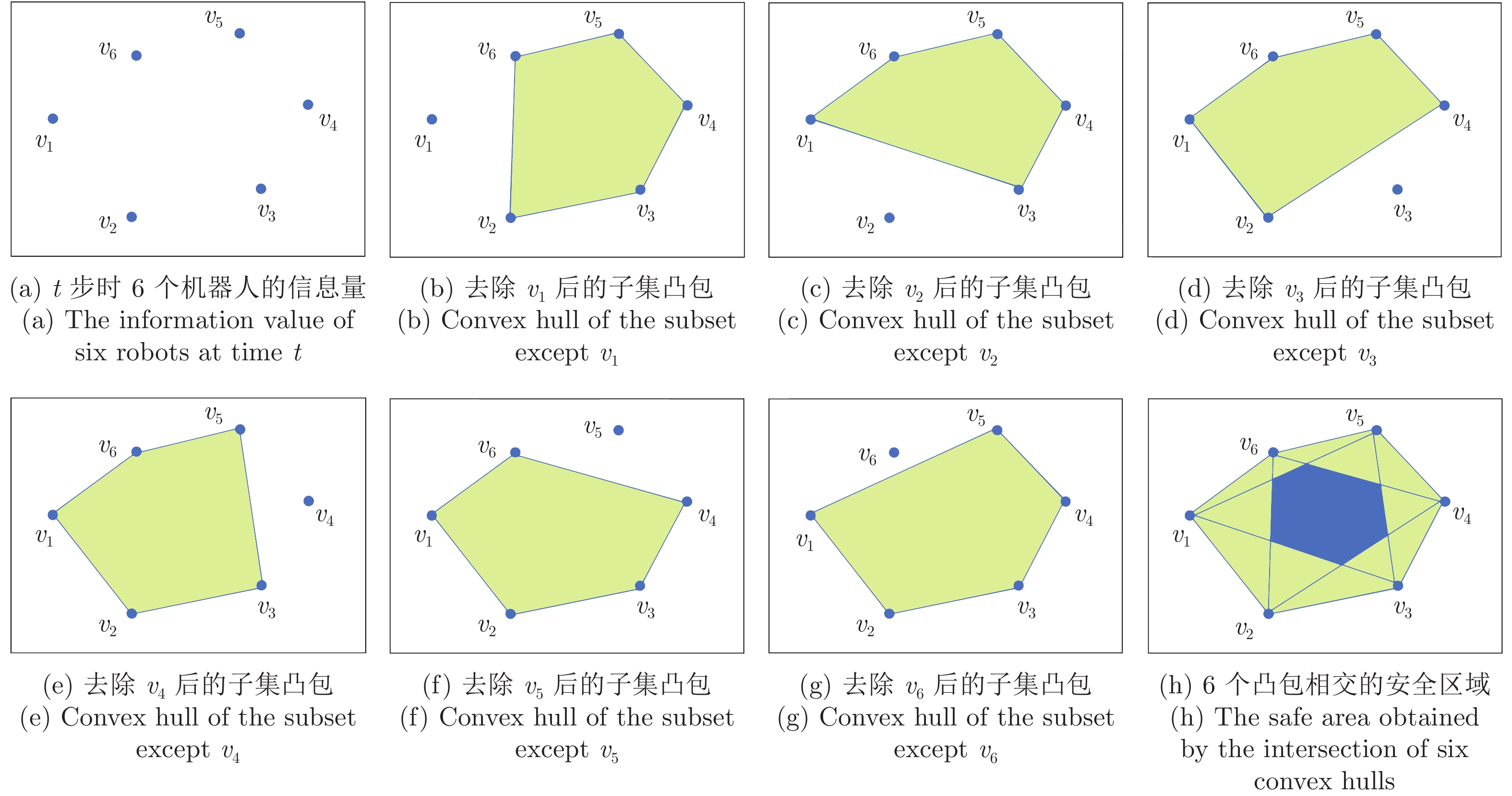
图 3 6个信息量的子集凸包和安全区域
Fig. 3 The subset convex hull and safe area of six information values

图 5 $ t = 35$时使用弹性向量协同寻源方法的寻源轨迹
Fig. 5 The source seeking trajectories of resilient vector cooperative source seeking at $ t = 35$
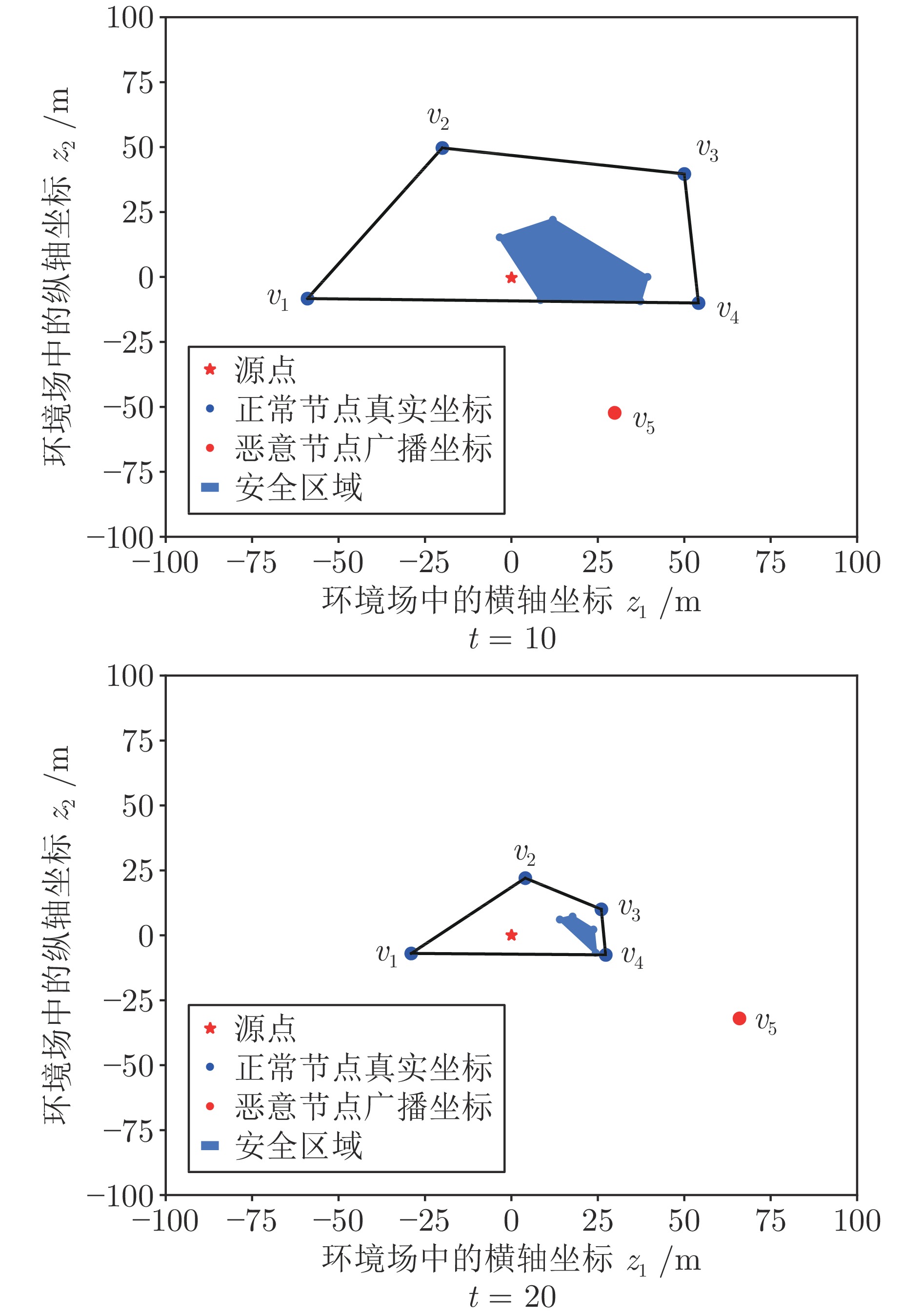
图 6 $t$ = 10和$t$ = 20时$v_3$计算的安全区域和正常节点真实坐标并上源点位置的凸包
Fig. 6 The safe area calculated by $v_3$ and the convex hull area of the real coordinates of the normal nodes with the source point position at $t = 10$ and $t = 20$
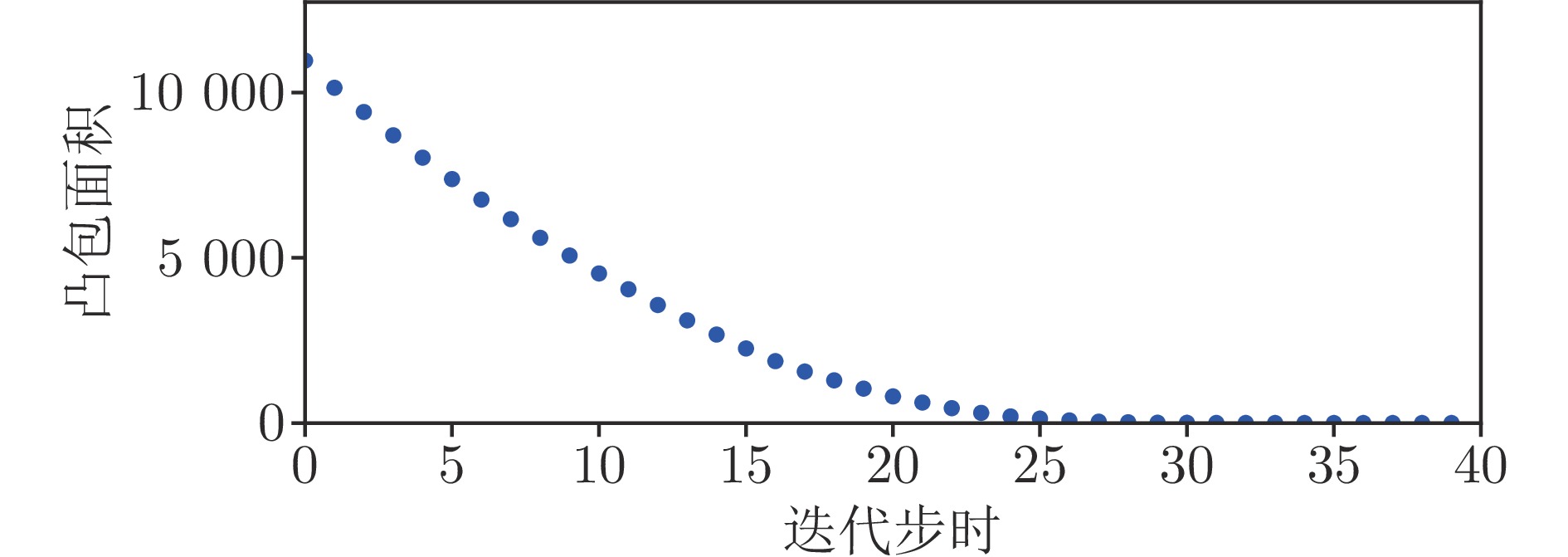
图 7 正常节点真实坐标并上源点位置的凸包面积随迭代步时$t$的变化关系
Fig. 7 The relation between the convex hull area of the real coordinates of the normal nodes with the source point position and the number of iteration $t $
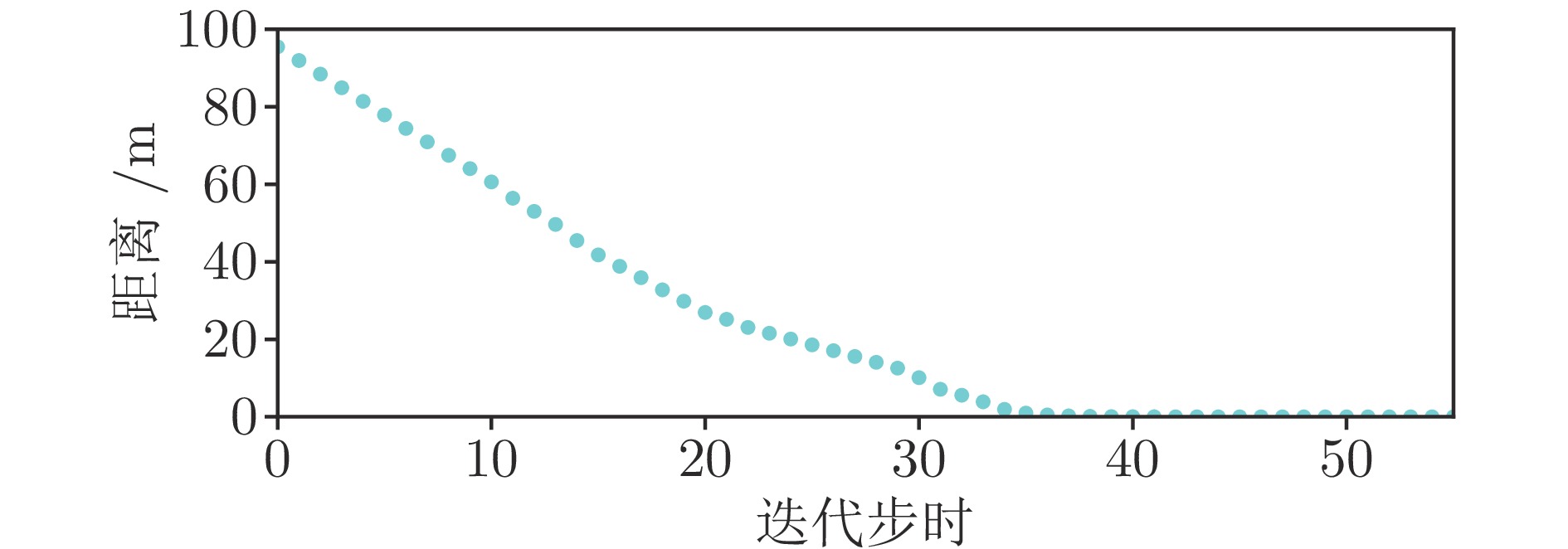
图 8 距离源点最远的节点与源点之间的距离随迭代步时$t$的变化关系
Fig. 8 Relationship between the number of iteration $t$ and the distance between the source point and the node farthest from the source point
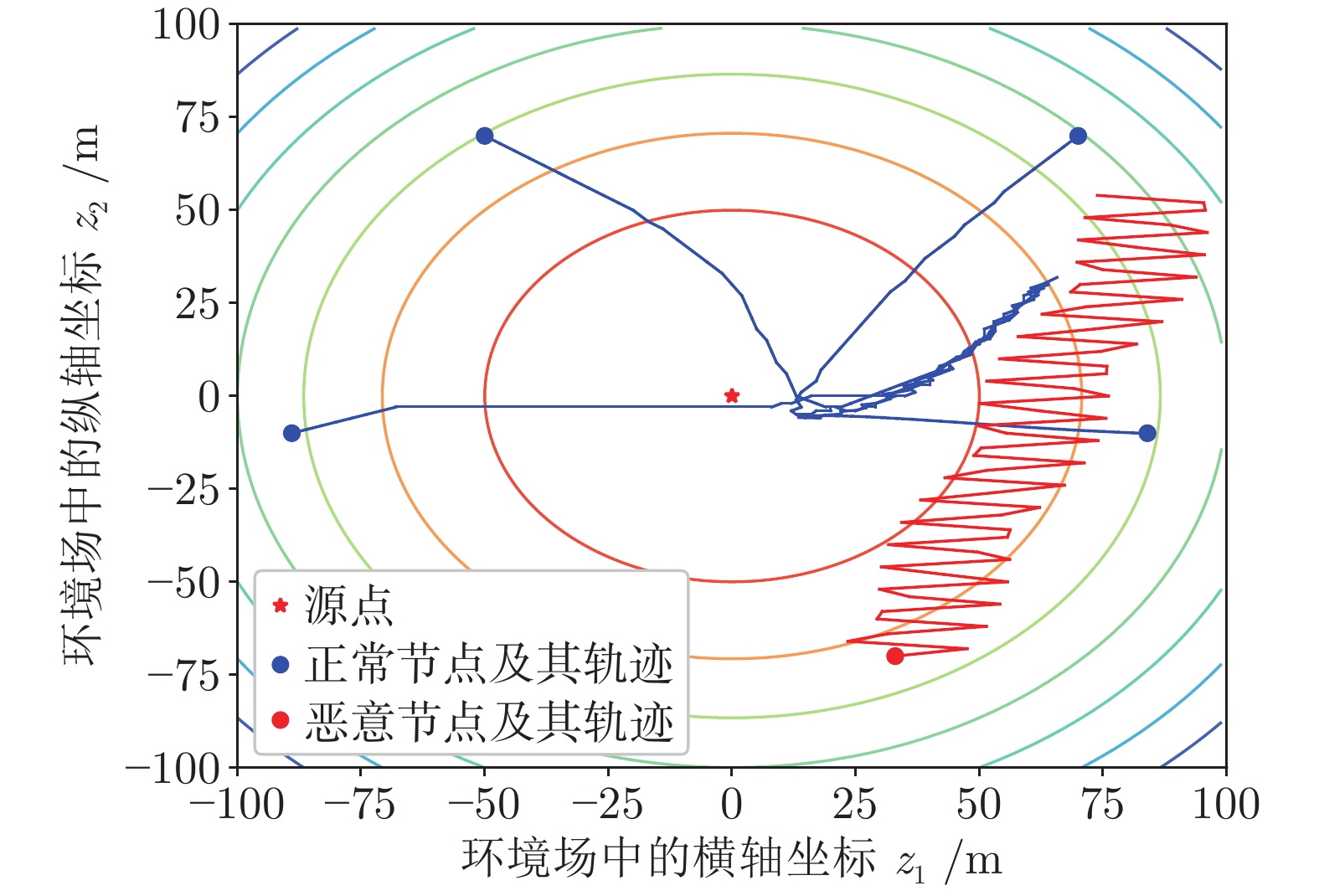
图 9 未采用计算安全区域方法的寻源轨迹
Fig. 9 The source seeking trajectories without calculation of safe area method

图 10 基于弹性标量协议和基于本文所提方法的安全区间面积随迭代步时$ t$变化关系
Fig. 10 The relationship between the number of iteration $t $ and the area of the safe interval based on the resilient scalar protocol and the method proposed in this paper
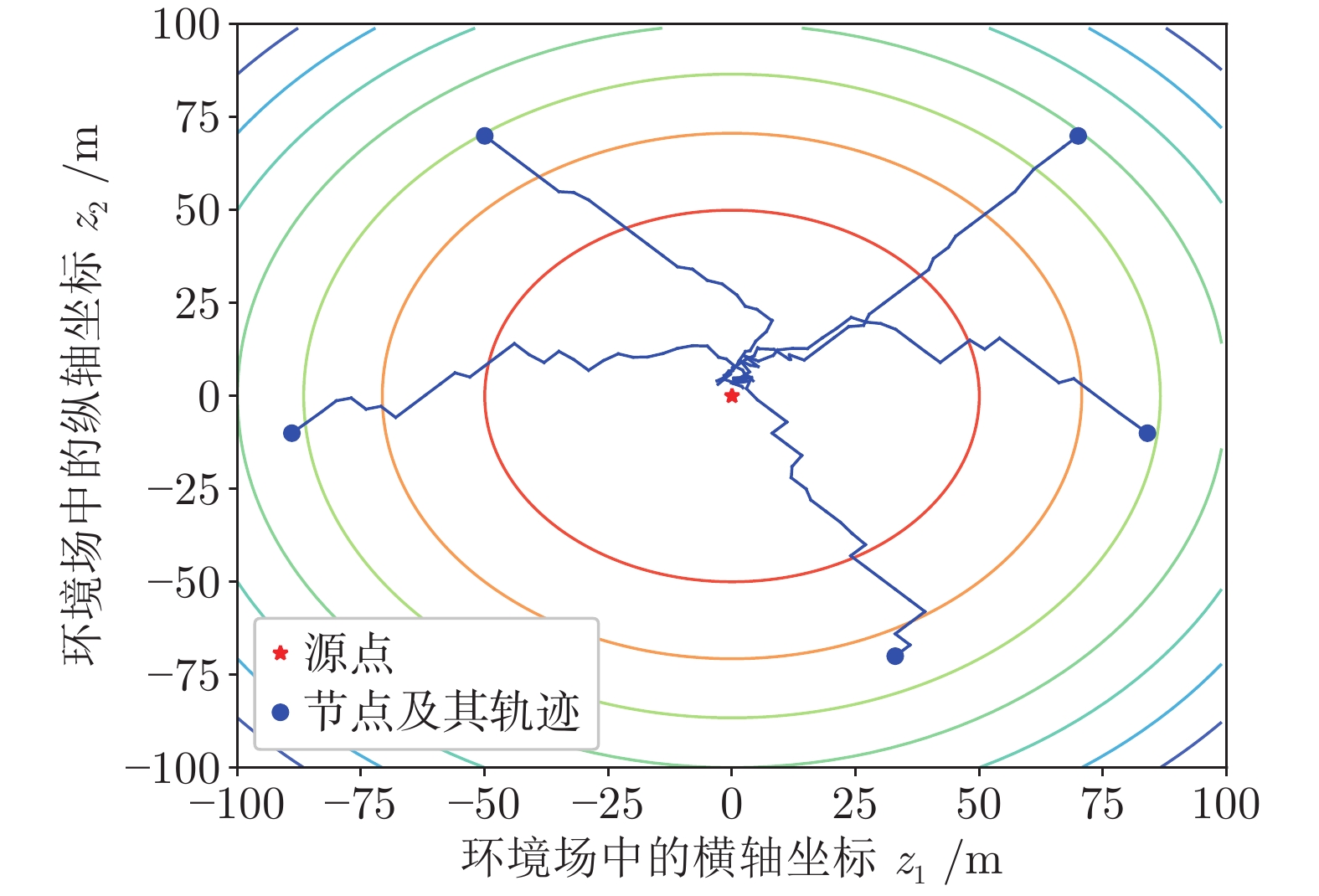

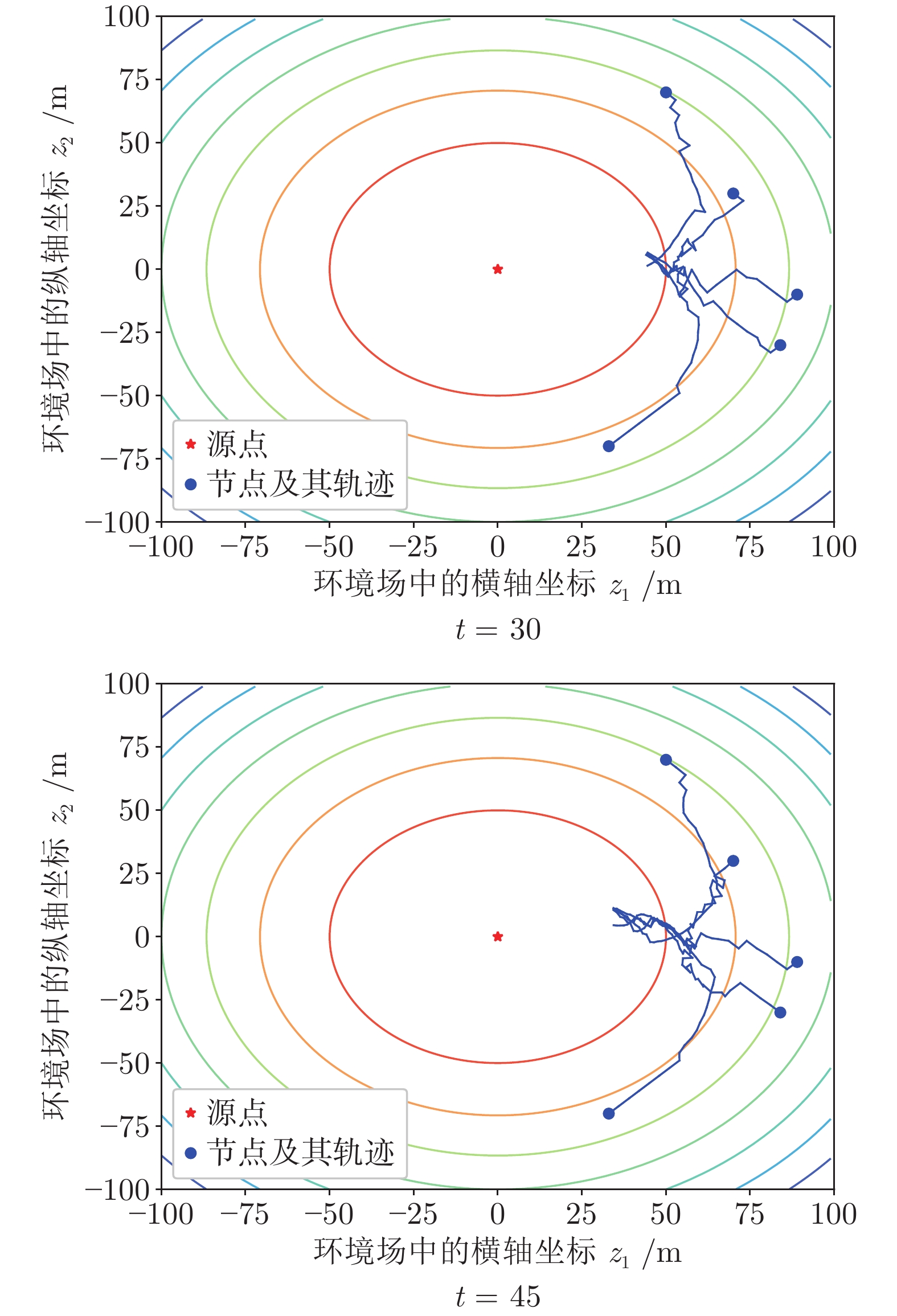
图 13 当机器人节点初始位置在源点同一侧的情况下使用本文方法在$t$ = 30和$t$ = 45时的寻源轨迹
Fig. 13 The source seeking trajectories based on the proposed method when the initial positions of the robot nodes are on the same side as the source point at $t $ = 30 and $t $ = 45
-
[1] Turgeman A, Datar A, Werner H. Gradient free source-seeking using flocking behavior. In: Proceedings of the American Control Conference (ACC). Philadelphia, USA: IEEE, 2019. 4647−4652 [2] 孟庆浩, 李飞, 张明路, 曾明, 魏小博. 多自主体量化趋同与有限数据率趋同综述. 自动化学报, 2008, 34(10): 1281-1290Meng Qing-Hao, Li Fei, Zhang Ming-Lu, Zeng Ming, Wei Xiao-Bo. Study on realization method of multi-robot active olfaction in turbulent plum environments. Acta Automatica Sinica, 2008, 34(10): 1281-1290 [3] Lu Q, Han Q L, Xie X G, Liu S R. A finite-time motion control strategy for odor source localization. IEEE Transactions on Industrial Electronics, 2014, 61(10): 5419-5430 doi: 10.1109/TIE.2014.2301751 [4] 李飞, 孟庆浩, 李吉功, 曾明. 基于P-PSO算法的室内有障碍通风环境下的多机器人气味源搜索. 自动化学报, 2009, 35(12): 1573-1579Li Fei, Meng Qing-Hao, Li Ji-Gong, Zeng Ming. P-PSO algorithm based multi-robot odor source search in ventilated indoor environment with obstacles. Acta Automatica Sinica, 2009, 35(12): 1573-1579 [5] Shen X Y, Yuan J, Shan Y G. A novel plume tracking method in partial 3D diffusive environments using multi-sensor fusion. Expert Systems with Applications, 2021, 178: Article No. 114993 doi: 10.1016/j.eswa.2021.114993 [6] Li Z, You K Y, Song S J. Cooperative source seeking via networked multi-vehicle systems. Automatica, 2020, 115: Article No. 108853 doi: 10.1016/j.automatica.2020.108853 [7] Zou R, Kalivarapu V, Winer E, Oliver J, Bhattacharya S. Particle swarm optimization-based source seeking. IEEE Transactions on Automation Science and Engineering, 2015, 12(3): 865-875 doi: 10.1109/TASE.2015.2441746 [8] 张建化, 巩敦卫, 张勇. 基于微粒群优化的有限通信多机器人气味寻源. 控制与决策, 2013, 28(5): 726-730 doi: 10.13195/j.cd.2013.05.89.zhangjh.020Zhang Jian-Hua, Gong Dun-Wei, Zhang Yong. Localizing odor sources using multiple robots based on particle swarm optimization in limited communication environments. Control and Decision, 2013, 28(5): 726-730 doi: 10.13195/j.cd.2013.05.89.zhangjh.020 [9] Moore B J, Canudas-de-Wit C. Source seeking via collaborative measurements by a circular formation of agents. In: Proceedings of the American Control Conference. Baltimore, USA: IEEE, 2010. 6417−6422 [10] Fabbiano R, Garin F, Canudas-de-Wit C. Distributed source seeking without global position information. IEEE Transactions on Control of Network Systems, 2018, 5(1): 228-238 doi: 10.1109/TCNS.2016.2594493 [11] Brinon-Arranz L, Schenato L. Consensus-based source-seeking with a circular formation of agents. In: Proceedings of the European Control Conference (ECC). Zurich, Switzerland: IEEE, 2013. 2831−2836 [12] Xu Y, Deng G L, Zhang T W, Qiu H, Bao Y G. Novel denial-of-service attacks against cloud-based multi-robot systems. Information Sciences, 2021, 576: 329-344 doi: 10.1016/j.ins.2021.06.063 [13] Zhou L F, Tzoumas V, Pappas G J, Tokekar P. Distributed attack-robust submodular maximization for multirobot planning. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020. 2479−2485 [14] Deng G L, Zhou Y, Xu Y, Zhang T W, Liu Y. An investigation of Byzantine threats in multi-robot systems. In: Proceedings of the 24th International Symposium on Research in Attacks, Intrusions and Defenses. San Sebastian, Spain: ACM, 2021. 17−32 [15] Fu W M, Qin J H, Zheng W X, Chen Y H, Kang Y. Resilient cooperative source seeking of double-integrator multi-robot systems under deception attacks. IEEE Transactions on Industrial Electronics, 2021, 68(5): 4218-4227 doi: 10.1109/TIE.2020.2987270 [16] Vaidya N H, Garg V K. Byzantine vector consensus in complete graphs. In: Proceedings of the ACM Symposium on Principles of Distributed Computing. New York, USA: ACM, 2013. 65−73 [17] Mendes H, Herlihy M. Multidimensional approximate agreement in Byzantine asynchronous systems. In: Proceedings of the 45th Annual ACM Symposium on Theory of Computing. New York, USA: ACM, 2013. 391−400 [18] Abbas W, Shabbir M, Li J N, Koutsoukos X. Resilient distributed vector consensus using centerpoint. Automatica, 2022, 136: Article No. 110046 doi: 10.1016/j.automatica.2021.110046 [19] Abbas W, Shabbir M, Li J N, Koutsoukos X. Interplay between resilience and accuracy in resilient vector consensus in multi-agent networks. In: Proceedings of the 59th IEEE Conference on Decision and Control (CDC). Jeju, South Korea: IEEE, 2020. 3127−3132 [20] Vaidya N H. Iterative Byzantine vector consensus in incomplete graphs. arXiv preprint arXiv: 1307.2483, 2013. [21] Shabbir M, Li J N, Abbas W, Koutsoukos X. Resilient vector consensus in multi-agent networks using centerpoints. In: Proceedings of the American Control Conference (ACC). Denver, USA: IEEE, 2020. 4387−4392 [22] Yan J Q, Li X X, Mo Y L, Wen C Y. Resilient multi-dimensional consensus in adversarial environment. arXiv preprint arXiv: 2001.00937, 2020. [23] Yan J Q, Mo Y L, Li X X, Xing L T, Wen C Y. Resilient vector consensus: An envent-based approach. In: Proceedings of the 16th International Conference on Control & Automation (ICCA). Singapore: IEEE, 2020. 889−894 [24] Wang X, Mou S S, Sundaram S. A resilient convex combination for consensus-based distributed algorithms. arXiv preprint arXiv: 1806.10271, 2018. [25] Zhang H T, Sundaram S. Robustness of information diffusion algorithms to locally bounded adversaries. In: Proceedings of the American Control Conference (ACC). Montreal, Canada: IEEE, 2012. 5855−5861 [26] Leblanc H J, Zhang H T, Koutsoukos X, Sundaram S. Resilient asymptotic consensus in robust networks. IEEE Journal on Selected Areas in Communications, 2013, 31(4): 766-781 doi: 10.1109/JSAC.2013.130413 [27] Wu Y M, He X X. Secure consensus control for multi-agent systems with attacks and communication delays. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1): 136-142 doi: 10.1109/JAS.2016.7510010 -

 下载:
下载:



计量
- 文章访问数: 4008
- HTML全文浏览量: 258
- PDF下载量: 284
- 被引次数: 0
