

Fixed-time Global Prescribed Performance Control for Vehicular Platoons With Actuator Nonlinearities
-
摘要: 针对含有执行器非线性的车辆队列控制系统, 提出一种固定时间全局预设性能控制(Global prescribed performance control, GPPC) 控制方法. 首先, 设计一种平滑等效变换, 在同一框架下解决死区及饱和问题, 同时消除执行器非线性固有拐点问题. 其次, 构造两个新型性能函数, 并基于此提出一种全局预设性能控制算法, 实现如下目标: 1) 保证跟踪误差在固定时间内收敛到预定稳态区域; 2) 消除初始误差必须已知的限制; 3) 减小误差的超调量. 然后, 基于上述等效变换及预设性能控制算法, 设计一种固定时间滑模队列容错控制方案, 实现固定时间单车稳定及队列稳定. 最后, 通过 MATLAB 仿真实验, 验证了所提算法的有效性.Abstract: The paper proposes a fixed-time global prescribed performance control (GPPC) scheme for the vehicular platoon system with actuator nonlinearities. A smooth equivalent transformation is first designed, with which both dead-zone and saturation can be handled under the same framework, while the inflection point problem caused by actuator nonlinearities is also dealt with. A global prescribed performance method, based on two novel performance functions, is constructed, while guaranteeing the tracking error converges to a predetermined range within a fixed time, eliminating the limitation that the initial value of the error needs to be known in advance, and reducing the overshoot of the error. Then, based on the proposed equivalent transformation and prescribed performance method, a fixed-time sliding mode fault-tolerant control algorithm is designed to achieve individual vehicle stability and string stability. Finally, the effectiveness of the proposed algorithm is verified by MATLAB simulation experiment.
-
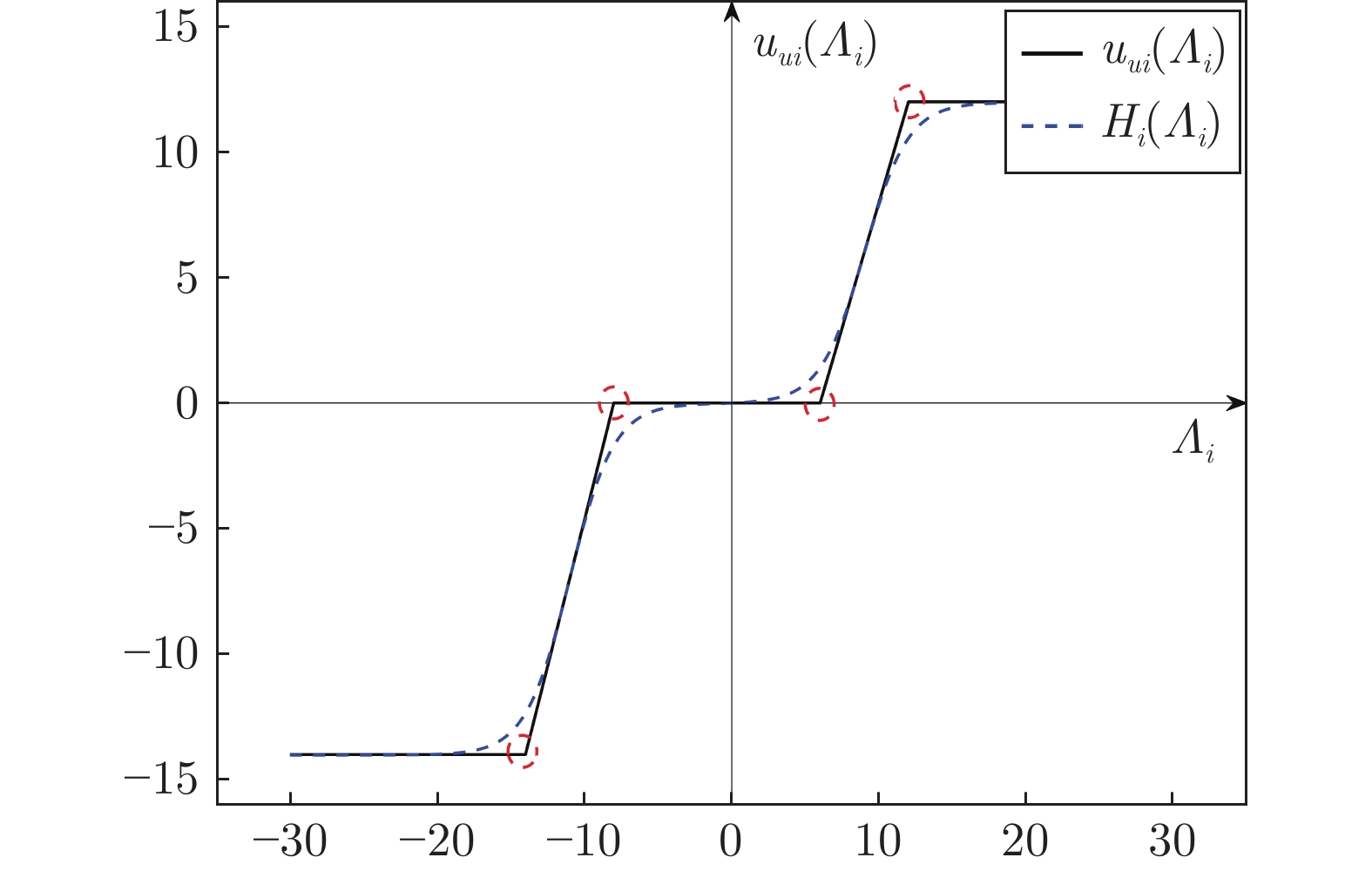
图 2 $u_{ui}(\varLambda_i)$ 和 $H_i(\varLambda_i)$ 的曲线图
Fig. 2 Curves of $u_{ui}(\varLambda_i)$ and $H_i(\varLambda_i)$
表 1 车辆 i 各参数的定义
Table 1 The definition of each parameter of vehicle i
参数 定义 参数 定义 $m_i$ 第 $i$ 辆车的质量 $\rho_a$ 空气质量 $\omega_i(t)$ 外部扰动 $C_{ai}$ 空气动力阻力系数 $g$ 重力加速度 $\theta_i$ 道路坡度角度 $A_i$ 车辆横截面积 $b_i$ 道路阻力滚动系数 $u_i(t)$ 控制输入 $\tau_i$ 发动机时间常数 $\rho_i(t)$ 驱动效率 $r_i(t)$ 偏置故障  下载: 导出CSV
下载: 导出CSV
-
[1] Chu S, Majumdar A. Opportunities and challenges for a sustainable energy future. Nature, 2012, 488(7411): 294-303 doi: 10.1038/nature11475 [2] 李永福, 邬昌强, 朱浩, 唐晓铭. 考虑车辆跟驰作用和通信时延的网联车辆队列轨迹跟踪控制. 自动化学报, 2021, 47(9): 2264-2275 doi: 10.16383/j.aas.c190046Li Yong-Fu, Wu Chang-Qiang, Zhu Hao, Tang Xiao-Ming. Trajectory tracking control for connected vehicle platoon considering car-following interactions and time delays. Acta Automatica Sinica, 2021, 47(9): 2264-2275 doi: 10.16383/j.aas.c190046 [3] Liu Y, Yao D Y, Li H Y, Lu R Q. Distributed cooperative compound tracking control for a platoon of vehicles with adaptive NN. IEEE Transactions on Cybernetics, 2022, 52(7): 7039-7048 doi: 10.1109/TCYB.2020.3044883 [4] 罗捷, 鲁良叶, 何德峰, 俞立, 杜海平. 通信拓扑切换下车辆队列分布式模型预测控制. 控制理论与应用, 2021, 38(7): 887-896 doi: 10.7641/CTA.2021.00662Luo Jie, Lu Liang-Ye, He De-Feng, Yu Li, Du Hai-Ping. Distributed model predictive control of vehicle platoons with switching communication topologies. Control Theory & Applications, 2021, 38(7): 887-896 doi: 10.7641/CTA.2021.00662 [5] Zhu Y, Zhu F. Distributed adaptive longitudinal control for uncertain third-order vehicle platoon in a networked environment. IEEE Transactions on Vehicular Technology, 2018, 67(10), 9183-9197 doi: 10.1109/TVT.2018.2863284 [6] 郭戈, 赵梓唯. 网联车辆队列有限时间终端滑模控制. 控制理论与应用, 2023, 40(1): 149-159Guo Ge, Zhao Zi-Wei. Finite-time terminal sliding mode control of connected vehicle platoons. Control Theory & Application, 2023, 40(1): 149-159 [7] 原豪男, 郭戈. 交通信息物理系统中的车辆协同运行优化调度. 自动化学报, 2019, 45(1): 143-152 doi: 10.16383/j.aas.c180354Yuan Hao-Nan, Guo Ge. Vehicle cooperative optimization scheduling in transportation cyber physical systems. Acta Automatica Sinica, 2019, 45(1): 143-152 doi: 10.16383/j.aas.c180354 [8] Guo X G, Xu W, Wang J L, Park J H, Yan H C. BLF-based neuroadaptive fault-tolerant control for nonlinear vehicular platoon with time-varying fault directions and distance restrictions. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8), 12388-12398 doi: 10.1109/TITS.2021.3113928 [9] Guo X G, Xu W, Wang J L, Ju H P. Distributed neuroadaptive fault-tolerant sliding-mode control for 2-D plane vehicular platoon systems with spacing constraints and unknown direction faults. Automatica, 2021, 129: Article No. 109675 [10] Verginis C K, Bechlioulis C P, Dimarogonas D V, Kyriakopoulos K J. Robust distributed control protocols for large vehicular platoons with prescribed transient and steady-state performance. IEEE Transactions on Control Systems Technology, 2018, 26(1): 299-304 doi: 10.1109/TCST.2017.2658180 [11] Li D D, Guo G. Prescribed performance concurrent control of connected vehicles with nonlinear third-order dynamics. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14793-14802 doi: 10.1109/TVT.2020.3040302 [12] Wang J G, Luo X Y, Wong W C, Guan X P. Specified-time vehicular platoon control with flexible safe distance constraint. IEEE Transactions on Vehicular Technology, 2019, 69(11): 10489-10503 [13] Wang J G, Wong W C, Luo X Y, Li X Y, Guan X P. Connectivity-maintained and specified-time vehicle platoon control systems with disturbance observer. International Journal of Robust and Nonlinear Control, 2021, 31(16): 7844-7861 doi: 10.1002/rnc.5723 [14] 高振宇, 孙振超, 郭戈. 网联车辆有限时间滑模预设性能队列控制. 控制理论与应用, 2023, 40(11): 1891−1902Gao Zhen-Yu, Sun Zhen-Chao, Guo Ge. Finite-time sliding mode prescribed performance platoon control of connected vehicles. Control Theory & Applications, 2023, 40(11): 1891−1902 [15] Gao Z Y, Zhang Y, Guo G. Fixed-time prescribed performance adaptive fixed-time sliding mode control for vehicular platoons with actuator saturation. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24176-24189 doi: 10.1109/TITS.2022.3202365 [16] Wang H, Bai W, Zhao X, Liu P X. Finite-time-prescribed performance-based adaptive fuzzy control for strict-feedback nonlinear systems with dynamic uncertainty and actuator faults. IEEE Transactions on Cybernetics, 2021, 52(7): 6959-6971 [17] Guo X G, Wang J L, Liao F, Teo R S. Distributed adaptive control for vehicular platoon with unknown dead-zone inputs and velocity/acceleration disturbances. International Journal of Robust and Nonlinear Control, 2017, 27(16): 2961-2981 doi: 10.1002/rnc.3720 [18] Guo X G, Wang J L, Liao F, Leo R S. Neuroadaptive quantized PID sliding-mode control for heterogeneous vehicular platoon with unknown actuator deadzone. International Journal of Robust and Nonlinear Control, 2019, 29(1): 188-208 doi: 10.1002/rnc.4394 [19] Chen J Z, Liang H, Li J, Lv Z K. Connected automated vehicle platoon control with input saturation and variable time headway strategy. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(8): 4929-4940 doi: 10.1109/TITS.2020.2983468 [20] Gao Z Y, Zhang Y, Guo G. Adaptive fixed-time sliding mode control of vehicular platoons with asymmetric actuator saturation. IEEE Transactions on Vehicular Technology, 2023, 72(7): 8409−8423 [21] Guo X G, Zhao J J, Li H J, Wang J L, Liao F, Chen Y. Novel auxiliary saturation compensation design for neuroadaptive NTSM tracking control of high speed trains with actuator saturation. Journal of the Franklin Institute-Engineering and Applied Mathematics, 2020, 357(3): 1582-1602 doi: 10.1016/j.jfranklin.2019.11.006 [22] Guo G, Li P, Hao L Y. A new quadratic spacing policy and adaptive fault-tolerant platooning with actuator saturation. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 1200-1212 doi: 10.1109/TITS.2020.3023453 [23] Guo X G, Ahn C K. Adaptive fault-tolerant pseudo-PID sliding-mode control for high-speed train with integral quadratic constraints and actuator saturation. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(12): 7421-7431 doi: 10.1109/TITS.2020.3002550 [24] Guo G, Li P, Hao L Y. Adaptive fault-tolerant control of platoons with guaranteed traffic flow stability. Transactions on Vehicular Technology, 2022, 69(7): 6916-6927 [25] Gao Z Y, Zhang Y, Guo G. Adaptive fixed-time prescribed performance control of vehicular platoons with unknown dead-zone and actuator saturation. International Journal of Robust and Nonlinear Control, 2023, 33(2): 1231-1253 doi: 10.1002/rnc.6405 [26] 郭戈, 张茜, 高振宇. 具有预设瞬稳态性能的有限时间智能车辆固定构型编队控制. 中国公路学报, 2022, 35(3): 28-42 doi: 10.3969/j.issn.1001-7372.2022.03.004Guo Ge, Zhang Qian, Gao Zhen-Yu. Finite-time fixed configuration formation control of intelligent vehicles with prescribed transient and steady-state performance. China Journal of Highway and Transport, 2022, 35(3): 28-42 doi: 10.3969/j.issn.1001-7372.2022.03.004 [27] Polyakov A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110. doi: 10.1109/TAC.2011.2179869 [28] Zuo Z Y. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica, 2015, 54: 305-309 doi: 10.1016/j.automatica.2015.01.021 [29] Yang H J, Ye D. Adaptive fixed-time bipartite tracking consensus control for unknown nonlinear multi-agent systems: An information classification mechanism. Information Sciences, 2018, 459: 238-254 doi: 10.1016/j.ins.2018.04.016 [30] Guo G, Li D D. Adaptive sliding mode control of vehicular platoons with prescribed tracking performance. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7511-7520 doi: 10.1109/TVT.2019.2921816 -

 下载:
下载:



图(12) / 表(1)
计量
- 文章访问数: 1247
- HTML全文浏览量: 600
- PDF下载量: 357
- 被引次数: 0
