

-
摘要: 模糊认知图(Fuzzy cognitive map, FCM)是建立在认知图和模糊集理论上的一类代表性的软计算理论, 兼具神经网络和模糊决策两者的优势, 已成功地应用于复杂系统建模和时间序列分析等众多领域. 学习权重矩阵是基于模糊认知图建模的首要任务, 是模糊认知图研究领域的焦点. 针对这一核心问题, 首先, 全面综述模糊认知图的基本理论框架, 系统地总结近年来模糊认知图的拓展模型. 其次, 归纳、总结和分析模糊认知图学习算法的最新研究进展, 对学习算法进行重新定义和划分, 深度阐述各类学习算法的时间复杂度和优缺点. 然后, 对比分析各类学习算法在不同科学领域的应用特点以及现有的模糊认知图建模软件工具. 最后, 讨论学习算法未来潜在的研究方向和发展趋势.Abstract: Fuzzy cognitive maps (FCM) are a representative soft computing theory based on cognitive maps and fuzzy set theory. They combine the advantages of both neural networks and fuzzy decision-making and have been successfully applied in many fields, including complex system modeling and time series analysis. Learning the weight matrix is the primary task of modeling based on fuzzy cognitive maps and is the focus of research in this field. To address this core issue, we first comprehensively review the basic theoretical framework of fuzzy cognitive maps and systematically summarize the extended models developed in recent years. Next, the most recent advancements in fuzzy cognitive map learning algorithms are reviewed, analyzed, and summarized. The algorithms are redefined and categorized, with a detailed exploration of their time complexity, strengths, and weaknesses. Additionally, the application properties of various learning algorithms in various scientific domains are also compared and analyzed in this research, along with the software tools that are now available for creating fuzzy cognitive maps. Finally, potential research directions and development trends for learning algorithms are discussed.
-
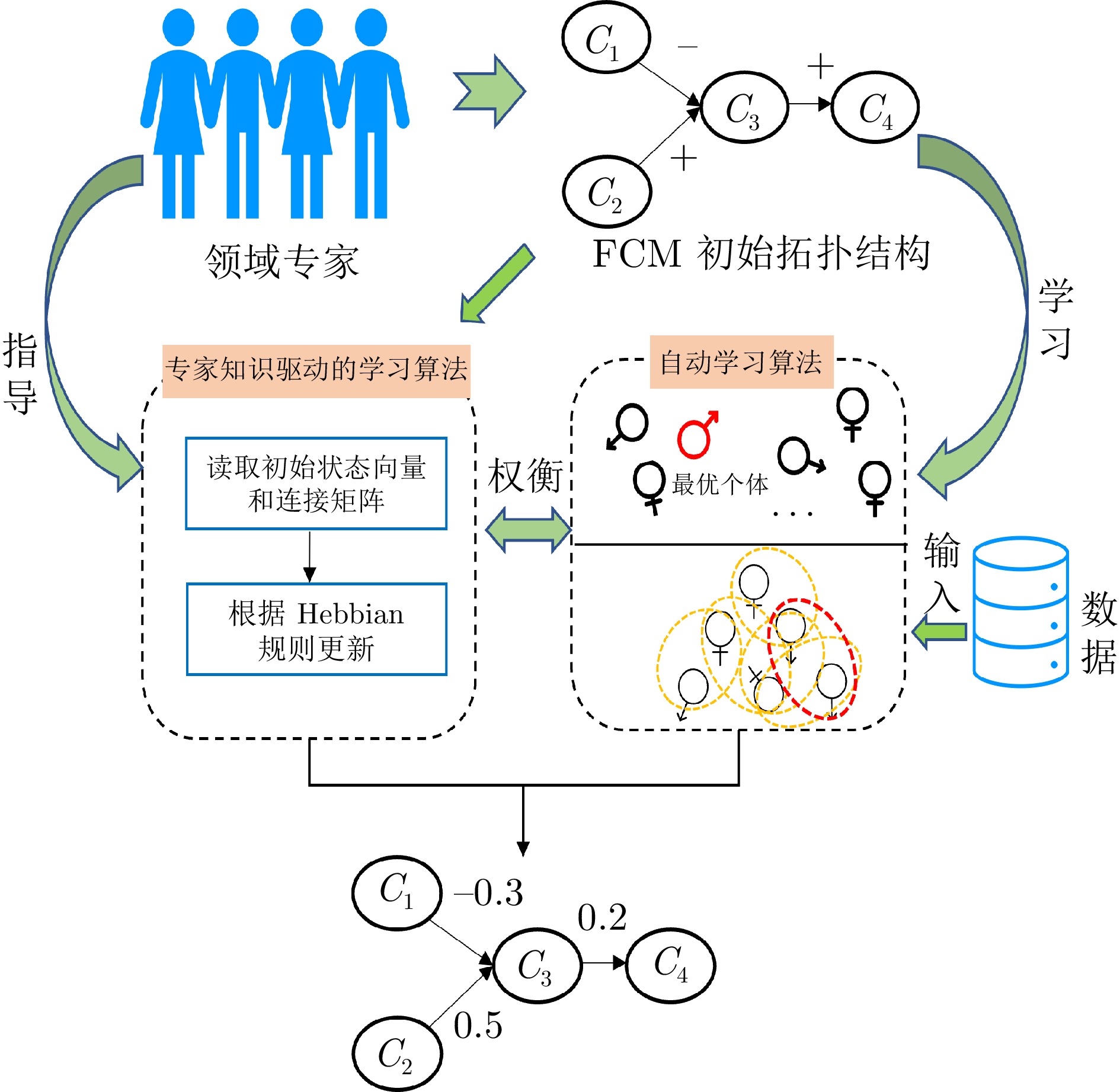
图 4 专家知识驱动的学习算法的基本流程
Fig. 4 The basic process of expert knowledge-driven learning algorithms
表 1 拓展认知图模型对比
Table 1 Comparison of extension cognitive map models
类别 名称 特点 优点 缺点 应用领域 基于不同
模糊理论
的拓展
认知图RBFCM[28] 引入模糊进位累加器计算因果权重 涵盖多种概念关系并具有
多功能性和简单性建模要求高 决策支持 FGCM[29] 引入灰色数衡量因果强度 建模概念之间的不确定信息 推理复杂 可靠性工程 IFCM[30] 利用直觉模糊集建模因果关系 衡量了因果关系中的不确定性 推理复杂 时间序列预测 IVFCM[31] 利用区间值描述因果关系的强度 考虑了非结构化环境相关的不确定性 依赖专家知识 决策支持, 时间序列
预测模型ECM[32] 在因果推理中融入了证据理论 既能表示不确定性又能进行知识融合 依赖专家知识,
推理复杂决策支持 RCN[33] 利用粗糙集表示因果关系 解决了不确定情况下的决策问题 依赖专家知识 决策支持软件,
可靠性评估FRCN[34] 利用模糊粗糙结构构建神经网络 建模了因果关系的不确定性 推理复杂 决策支持 zT2FSs-FCM[35] 引入二型模糊集建模节点间的
因果权重捕获了概念间的不确定性关系 推理复杂 系统评估 面向动态
系统建模
的拓展
认知图DCN[37] 考虑了因果关系的时变性 结构上具有更高的可扩展性和灵活性 依赖拉普拉斯框架,
建模复杂度高决策支持 DRFCM[39] 推理过程中引入非线性动态函数 能够捕获动态因果关系,
具有自适应性建模要求高 风险评估, 决策支持 FTCM[40] 考虑了因果关系强度和时间滞后性 能够随时间推移分析系统的动态行为 建模复杂 时间序列预测 E-FCM[41] 采用检查机制模拟动态因果关系 能够自我进化适应不断发展的行为 计算耗时 动态场景建模 HFCM[42] 考虑了复杂系统建模过程中的
多阶动态性准确地描述了系统行为 随着阶数增加,
计算复杂度增加时间序列预测 TAFCM[43] 引入了定时自动机理论建模
系统的时间粒度推理过程具有动态性和自适应性 建模要求高 人类情绪建模 DFCM[44] 嵌入在深度神经网络的框架中 构建可解释预测器, 挖掘隐藏的
因果关系训练耗时, 容易面临
“数据饥饿”问题时间序列预测 AFCM[45] 构建基于趋势的信息粒引入
自适应更新机制自适应权重长期预测 计算耗时 时间序列预测  下载: 导出CSV
下载: 导出CSV
表 2 基于学习范式的模糊认知图学习算法分类
Table 2 Classification of fuzzy cognitive map learning algorithms based on the learning paradigm
类别 学习方法 时间复杂度 优点 缺点 作者 发表年份 专家知识
驱动的方法DHL[47] ${\rm{O}}(N^2)$ 简单, 易操作 只考虑了当前的一对概念 Dickerson等 1994 BDA[48] ${\rm{O}}(N^2)$ 考虑多个概念的影响 只适用于二进制计算 Huerga 2002 AHL[49] ${\rm{O}}(N^2)$ 考虑了所有概念的影响 训练耗时 Papageorgiou等 2004 NHL[50] ${\rm{O}}(N^2)$ 保留了原始的图结构, 具有合理的物理解释性 依赖专家标准 Papageorgiou等 2003 INHL[51] ${\rm{O}}(N^2)$ 避免陷入局部最小值 需要先验知识 Li等 2004 DDNHL[52] ${\rm{O}}(N^2)$ 数据驱动 依赖专家知识 Stach 等 2008 带终端约束的
NHL算法[53]${\rm{O}}(N^2)$ 提高结果的可行性 需要先验知识 陈宁等 2016 FBN[54] ${\rm{O}}(N^2)$ 利用模糊因果规则推理 性能受激活参数的影响 Carvalho等 2007 基于bagging增强的NHL算法[55] ${\rm{O}}(N^2)$ 泛化性能较好 依赖专家知识 Papageorgiou等 2012 自动学习
算法GA[56] ${\rm{O}}(N^2)$ 数据驱动 受限于二进制编码 Mateou等 2005 RCGA[57] ${\rm{O}}(N^2)$ 数据驱动, 实数编码 参数寻优耗时 Stach 等 2005 PSO[58−59] ${\rm{O}}(N!)$ 数据驱动, 元启发式算法 依赖专家知识 Parsopoulos 等Oikonomou 等 2003
2013SOMA[60] ${\rm{O}}(N^2)$ 数据驱动 计算耗时 Vaščák 2010 ACO[61] ${\rm{O}}(N^2)$ 概率型算法鲁棒性强 计算耗时, 容易早熟收敛 Chen等 2012 ABC[62] ${\rm{O}}(N^2)$ 数据驱动 参数寻优耗时 Yesil等 2013 ICA[63] ${\rm{O}}(N^3)$ 数据驱动 计算复杂, 耗时 Ahmadi 等 2015 DE[64] ${\rm{O}}(N^2)$ 容易理解, 计算简单 易局部收敛 Juszczuk等 2009 SA[65−66] ${\rm{O}}(N^2)$ 计算简单 参数寻优耗时 Ghazanfari 等
Alizadeh等2007
2009BB-BC[67] ${\rm{O}}(N^2)$ 算法简单, 泛化能力较好 不适用于解决高维问题 Yesil等 2010 CA[68] ${\rm{O}}(N^2)$ 全局搜索与局部搜索结合 参数寻优耗时, 对问题的依赖性强 Ahmadi等 2014 基于互信息的
模因算法[70]${\rm{O}}(N^2)$ 适用于大规模图学习 无法在搜索过程中
关注图的稀疏性Zou等 2018 MARO[71] ${\rm{O}}(N^2)$ 只需调用一次目标
函数, 无需设置参数计算复杂, 易陷入局部最优 Salmeron等 2019 分解RCGA[72−73] ${\rm{O}}(N^2)$ 分解并行计算 计算复杂 Chen等, Stach等 2015, 2010 D&C RCGA[74] ${\rm{O}}(N^2)$ 可并行计算并具有可扩展性 随着图的大小和处理器数量增加, 算法性能下降 Stach等 2007 dMAGA[75] ${\rm{O}}(N^2)$ 适用于大规模图学习
具有鲁棒性受 FCM 节点的取值范围限制, 需在算法执行前进行数据归一化 Liu等 2015 MA-NN[76] ${\rm{O}}(N^2)$ 分布式计算框架适用于
大规模网络重建受FCM节点的取值范围限制, 需在算法执行前进行数据归一化 Chi等 2019 MOEA[77, 79−80] ${\rm{O}}(N^2)$ 多目标进化考虑了图的稀疏性 不适用于大规模图学习 Liu等, Poczeta 等,
Chi等2019, 2018, 2016 IMFPSO[78] ${\rm{O}}(N!)$ 优化过程考虑了知识迁移 算法易早熟, 过早收敛 Liang等 2022 SRCGA[15] ${\rm{O}}(N^2)$ 考虑了图的稀疏性 不适用于处理大规模数据 Stach等 2012 MMMA[17] ${\rm{O}}(N^2)$ 多图优化知识转移 有可能发生负信息迁移, 导致收敛速度缓慢 Shen等 2020 CS[81] ${\rm{O}}(N^3)$ 适用于大规模稀疏图学习 参数寻优耗时 Wu等 2017 内点法[82] ${\rm{O}}(N^4)$ 精度高, 可扩展性好 对初值敏感, 难以处理
不等式约束问题Lu等 2020 约束优化[83] ${\rm{O}}(N^3)$ 考虑了矩阵分布具有抗噪能力 仅适用于有监督学习 Feng等 2021 近似梯度下降[84] ${\rm{O}}(N^3)$ 适用于解决大规模数据问题 对初始点敏感, 可能
陷入局部最优Ding等 2021 Moore-Penrose逆[85] ${\rm{O}}(N^3)$ 参数较少 计算复杂 Vanhoenshoven等 2020 Lasso回归[86] ${\rm{O}}(N^3)$ 考虑了图的稀疏性, 适用于
大规模图学习可能出现过拟合 Wu等 2016 岭回归[87] ${\rm{O}}(N^3)$ 泛化性能较好, 适用于
大规模图学习对特征的缩放敏感 Yang等 2018 弹性网络回归[88] ${\rm{O}}(N^3)$ 增加了L1 和L2 正则化, 适用于大规模图学习 参数调节困难 Shen等 2020 支持向量回归[89] ${\rm{O}}(N^4)$ 适用于高维非线性数据 对缺失数据敏感 Gao等 2020 贝叶斯岭回归[90] ${\rm{O}}(N^4)$ 简单、模型适应性较强 对模型的假设较多依赖先验分布 Liu等 2020 FTRL[91] ${\rm{O}}(N^3)$ 在线学习 计算、推理过程复杂 Wu 等 2021 半自动学习算法 DE+NHL[92] ${\rm{O}}(N^2)$ 进化过程中保留了图的物理意义 依赖专家知识 Papageorgiou等 2005 RCGA+NHL[93] ${\rm{O}}(N^2)$ 利用了遗传算法的全局优化能力 受限于专家经验 Zhu等 2008 PSO+NHL[94] ${\rm{O}}(N!)$ 避免人为因素产生的训练误差 受限于专家经验 Yazdi等 2008 EGDA+NHL[95] ${\rm{O}}(N^2)$ 全局搜索, 参数少 受限于专家经验 Ren 2012 DDNHL+GA[96] ${\rm{O}}(N^3)$ 数据驱动分类推理能力强 受限于专家经验 Natarajan等 2016 RCGA+DE+
梯度下降[97]${\rm{O}}(N^2)$ 全局搜索 参数寻优耗时 Madeiro 等 2012 注: 时间复杂度为该算法更新一次FCM权重矩阵所需时间开销, 未考虑数据量大小及最大迭代次数. N表示节点个数.
下载: 导出CSV
表 3 大规模模糊认知图学习算法分类
Table 3 Large-scale fuzzy cognitive map learning algorithm classification
类别 方法 转换函数 最大FCM规模 发表年份 基于暴力求解的方法 D&C RCGA[73] sigmoid 40 2010 并行RCGA[74] sigmoid 80 2007 dMAGA[75] sigmoid 200 2015 MA-NN[76] sigmoid 100 2019 MOEA[80] sigmoid 40 2015 SRCGA[15] sigmoid 40 2012 基于维度缩减的方法 MIMA[70] sigmoid 500 2018 文献[100] sigmoid/tanh 25 2015 文献[101] sigmoid 10 2018 基于分解的方法 CS[81] sigmoid 1 000 2017 MMMA[17] sigmoid/tanh 600 2020 内点法[82] sigmoid/tanh 200 2020 约束优化[83] sigmoid/tanh 200 2021 近似梯度下降[84] sigmoid 200 2021 Lasso回归[86] sigmoid 500 2016 弹性网络回归[88] sigmoid 200 2020 HTMA-DRA[99] sigmoid 200 2022 dMAGA-FCM$_D$[102] sigmoid 500 2017 NMMMAGA[103] sigmoid 200 2019 Parallel FCM[104] sigmoid 1 000 2023
下载: 导出CSV
表 4 模糊认知图学习算法的应用文献总结
Table 4 Literature review on the application of fuzzy cognitive map learning algorithms
类别 应用领域 文献 专家知识驱动的方法 模式分类 [55] 前列腺癌诊断 [105] 公司信用风险评估 [106] 自闭症预测 [107] 结构损伤检测 [108] 帕金森病预测 [110] 事故成因预测 [111] 裂纹严重程度分级 [112] 乳腺癌风险评估 [113] 自动学习算法 基因调控网络重建 [17, 75–77, 82, 84, 86] 多变量时间序列预测 [44−45, 78, 85, 116–119] 单变量时间序列预测 [83, 87, 89−91, 120−127, 140–143] 情景意识评估 [114] 病情趋势预测 [134] 前列腺癌预测 [135] 日需水量预测 [136] 电器能耗预测 [137] RFID物流操作评估 [138] 分类 [5, 128–133, 140] 半自动学习算法 医学诊断 [139] 甘蔗产量预测 [96] 决策支持 [92] 化学控制 [94] 太阳能发电 [97]
下载: 导出CSV
表 5 模糊认知图建模工具对比
Table 5 Comparison of fuzzy cognitive map modeling tools
工具名称 受众定位 适用场景 应用形式 学习算法数量 图形页面 年份 FCM Modeler[144] 学术研究 静态建模, 群体决策 Java Applet 1 √ 1997 FCMappers.net[145] 学术研究 网络分析, 系统建模 网站 — — 2009 FCM Tool[146] 商业产品, 学术研究 决策支持, 系统建模 软件 1 √ 2011 FCM Designer[147] 学术研究 系统建模 Java Applet — √ 2010 FCM Designer Version 2.0[148] 学术研究 医学诊断, 推荐系统建模 Java Applet — √ 2016 Mental Modeler[149] 商业产品, 学术研究 群体决策, 系统建模 Web 页面 — √ 2013 JFCM[150] 教学工具, 学术研究 系统建模 Java开源库 — — 2014 ISEMK[152] 商业产品, 学术研究 决策支持, 时间序列预测 — 6 √ 2015 FCM Expert[154] 学术研究 决策支持, 系统建模 Java软件 4 √ 2017 FCMpy[158] 学术研究 系统建模 开源Python模块 5 √ 2022 注: “—”表示“无”或者未查询到.
下载: 导出CSV
-
[1] 杨博帆, 张琳, 汪文峰, 唐冬丽, 丁尔启, 项阳. 复杂装备系统弹性度量方法研究. 自动化学报, 2023, 49(7): 1498-1507Yang Fu-Fan, Zhang Lin, Wang Wen-Feng, Tang Dong-Li, Ding Er-Qi, Xiang Yang. Research on resilience measurement method of complex equipment system. Acta Automatica Sinica, 2023, 49(7): 1498-1507 [2] 杨炳儒, 李晋宏, 宋威, 李欣. 面向复杂系统的知识发现过程模型KD(D&K)及其应用. 自动化学报, 2007, 33(2): 151-155 doi: 10.1360/aas-007-0151Liang Bing-Ru, Li Jin-Hong, Song Wei, Li Xin. KD(D&K): A new knowledge discovery process model for complex system. Acta Automatica Sinica, 2007, 33(2): 151-155 doi: 10.1360/aas-007-0151 [3] Kosko B. Fuzzy cognitive maps. International Journal of Man-Machine Studies, 1986, 24(1): 65-75 doi: 10.1016/S0020-7373(86)80040-2 [4] Mls K, Cimler R, Vaščák J, Puheim M. Interactive evolutionary optimization of fuzzy cognitive maps. Neurocomputing, 2017, 232: 58-68 doi: 10.1016/j.neucom.2016.10.068 [5] Homenda W, Jastrzebska A. Time-series classification using fuzzy cognitive maps. IEEE Transactions on Fuzzy Systems, 2020, 28(7): 1383-1394 [6] Hajek P, Froelich W. Integrating TOPSIS with interval-valued intuitionistic fuzzy cognitive maps for effective group decision making. Information Sciences, 2019, 485: 394-412 doi: 10.1016/j.ins.2019.02.035 [7] Hoyos W, Aguilar J, Toro M. PRV-FCM: An extension of fuzzy cognitive maps for prescriptive modeling. Expert Systems with Applications, 2023, 231: Article No. 120729 doi: 10.1016/j.eswa.2023.120729 [8] Borrero-Domínguez C, Escobar-Rodríguez T. Decision support systems in crowdfunding: a fuzzy cognitive maps (FCM) approach. Decision Support Systems, 2023, 173: Article No. 114000 doi: 10.1016/j.dss.2023.114000 [9] Nápoles G, Papageorgiou E, Bello R, Vanhoof K. Learning and convergence of fuzzy cognitive maps used in pattern recognition. Neural Processing Letters, 2017, 45(2): 431-444 doi: 10.1007/s11063-016-9534-x [10] Hoyos W, Aguilar J, Toro M. Federated learning approaches for fuzzy cognitive maps to support clinical decision-making in dengue. Engineering Applications of Artificial Intelligence, 2023, 123: Article No. 106371 doi: 10.1016/j.engappai.2023.106371 [11] Ameli M, Esfandabadi Z S, Sadeghi S, Ranjbari M, Zanetti M C. COVID-19 and sustainable development goals (SDGs): Scenario analysis through fuzzy cognitive map modeling. Gondwana Research, 2023, 114: 138-155 doi: 10.1016/j.gr.2021.12.014 [12] Pérez Y F, Corona C C, Estrada A F. Fuzzy cognitive maps for evaluating software usability. Uncertainty Management With Fuzzy and Rough Sets: Recent Advances and Applications. Cham: Springer, 2019. 141−155 [13] Bertolini M, Bevilacqua M. Fuzzy cognitive maps for human reliability analysis in production systems. Production Engineering and Management Under Fuzziness. Berlin: Springer, 2010. 381−415 [14] Papageorgiou E I. Learning algorithms for fuzzy cognitive maps—a review study. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2012, 42(2): 150-163 doi: 10.1109/TSMCC.2011.2138694 [15] Stach W, Pedrycz W, Kurgan L A. Learning of fuzzy cognitive maps using density estimate. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2012, 42(3): 900-912 doi: 10.1109/TSMCB.2011.2182646 [16] Felix G, Nápoles G, Falcon R, Froelich W, Vanhoof K, Bello R. A review on methods and software for fuzzy cognitive maps. Artificial Intelligence Review, 2019, 52(3): 1707-1737 doi: 10.1007/s10462-017-9575-1 [17] Shen F, Liu J, Wu K. Evolutionary multitasking fuzzy cognitive map learning. Knowledge-Based Systems, 2020, 192: Article No. 105294 doi: 10.1016/j.knosys.2019.105294 [18] 林春梅. 模糊认知图模型方法及其应用研究[博士学位论文], 东华大学, 中国, 2006.Lin Chun-Mei. Model Method and Application Study of Fuzzy Cognitive Map [Ph.D. dissertation], Donghua University, China, 2006. [19] Stylios C D, Groumpos P P. Modeling complex systems using fuzzy cognitive maps. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2004, 34(1): 155-162 doi: 10.1109/TSMCA.2003.818878 [20] Papageorgiou E I. A new methodology for decisions in medical informatics using fuzzy cognitive maps based on fuzzy rule-extraction techniques. Applied Soft Computing, 2011, 11(1): 500-513 doi: 10.1016/j.asoc.2009.12.010 [21] Nápoles G, Grau I, Concepción L, Koumeri L K, Papa J P. Modeling implicit bias with fuzzy cognitive maps. Neurocomputing, 2022, 481: 33-45 doi: 10.1016/j.neucom.2022.01.070 [22] Nair A, Reckien D, van Maarseveen M F A M. Generalised fuzzy cognitive maps: Considering the time dynamics between a cause and an effect. Applied Soft Computing, 2020, 92: Article No. 106309 doi: 10.1016/j.asoc.2020.106309 [23] Luo C, Wang H Y, Zheng Y J. Controllability of k-valued fuzzy cognitive maps. IEEE Transactions on Fuzzy Systems, 2020, 28(8): 1694-1707 doi: 10.1109/TFUZZ.2019.2921263 [24] Harmati I Á, Hatwágner M F, Kóczy L T. Global stability of fuzzy cognitive maps. Neural Computing and Application, 2023, 35(10): 7283-7295 doi: 10.1007/s00521-021-06742-9 [25] Concepción L, Nápoles G, Falcon R, Vanhoof K, Bello R. Unveiling the dynamic behavior of fuzzy cognitive maps. IEEE Transactions on Fuzzy Systems, 2021, 29(5): 1252-1261 doi: 10.1109/TFUZZ.2020.2973853 [26] Bueno S, Salmeron J L. Benchmarking main activation functions in fuzzy cognitive maps. Expert systems with Applications, 2009, 36(3): 5221-5229 doi: 10.1016/j.eswa.2008.06.072 [27] Papageorgiou E I, Salmeron J L. A review of fuzzy cognitive maps research during the last decade. IEEE Transactions on Fuzzy Systems, 2013, 21(1): 66-79 doi: 10.1109/TFUZZ.2012.2201727 [28] Carvalho J P, Tome J A B. Rule based fuzzy cognitive maps-expressing time in qualitative system dynamics. In: Proceedings of the 10th IEEE International Conference on Fuzzy Systems. Melbourne, Australia: IEEE, 2001. 280−283 [29] Salmeron J L. Modelling grey uncertainty with fuzzy grey cognitive maps. Expert Systems with Applications, 2010, 37(12): 7581-7588 doi: 10.1016/j.eswa.2010.04.085 [30] Iakovidis D K, Papageorgiou E. Intuitionistic fuzzy cognitive maps for medical decision making. IEEE Transactions on Information Technology in Biomedicine, 2011, 15(1): 100-107 doi: 10.1109/TITB.2010.2093603 [31] Hajek P, Prochazka O. Interval-valued fuzzy cognitive maps for supporting business decisions. In: Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Vancouver, Canada: IEEE, 2016. 531−536 [32] Kang B Y, Deng Y, Sadiq R, Mahadevan S. Evidential cognitive maps. Knowledge-Based Systems, 2012, 35: 77-86 doi: 10.1016/j.knosys.2012.04.007 [33] Nápoles G, Grau I, Papageorgiou E, Bello R, Vanhoof K. Rough cognitive networks. Knowledge-Based Systems, 2016, 91: 46-61 doi: 10.1016/j.knosys.2015.10.015 [34] Nápoles G, Mosquera C, Falcon R, Grau I, Bello R, Vanhoof K. Fuzzy-rough cognitive networks. Neural Networks, 2018, 97: 19-27 doi: 10.1016/j.neunet.2017.08.007 [35] Al Farsi A, Petrovic D, Doctor F. A non-iterative reasoning algorithm for fuzzy cognitive maps based on type 2 fuzzy sets. Information Sciences, 2023, 622: 319-336 doi: 10.1016/j.ins.2022.11.152 [36] Li H J, Xu W Z, Qiu C Y, Pei J. Fast Markov clustering algorithm based on belief dynamics. IEEE Transactions on Cybernetics, 2023, 53(6): 3716-3725 doi: 10.1109/TCYB.2022.3141598 [37] Miao Y, Liu Z Q, Siew C K, Miao C Y. Dynamical cognitive network-an extension of fuzzy cognitive map. IEEE Transactions on Fuzzy Systems, 2001, 9(5): 760-770 doi: 10.1109/91.963762 [38] Miao Y, Miao C Y, Tao X H, Shen Z Q, Liu Z Q. Transformation of cognitive maps. IEEE Transactions on Fuzzy Systems, 2010, 18(1): 114-124 doi: 10.1109/TFUZZ.2009.2037218 [39] Aguilar J. A dynamic fuzzy-cognitive-map approach based on random neural networks. International Journal of Computational Cognition, 2004, 1(4): 91-107 [40] Zhang W, Liu L, Zhu Y C. Using fuzzy cognitive time maps for modeling and evaluating trust dynamics in the virtual enterprises. Expert Systems with Applications, 2008, 35(4): 1583-1592 doi: 10.1016/j.eswa.2007.08.071 [41] Andreou A S, Mateou N H, Zombanakis G A. Evolutionary fuzzy cognitive maps: A hybrid system for crisis management and political decision making. In: Proceedings of the Conference on Computational Intelligence for Modelling Control and Automation. Vienna, Austria: 2003. 732−743 [42] Stach W, Kurgan L, Pedrycz W. Higher-order fuzzy cognitive maps. In: Proceedings of the NAFIPS 2006——2006 Annual Meeting of the North American Fuzzy Information Processing Society. Montreal, Canada: IEEE, 2006. 166−171 [43] Acampora G, Loia V, Vitiello A. Distributing emotional services in ambient intelligence through cognitive agents. Service Oriented Computing and Applications, 2011, 5(1): 17-35 doi: 10.1007/s11761-011-0078-7 [44] Wang J Y, Peng Z, Wang X D, Li C, Wu J J. Deep fuzzy cognitive maps for interpretable multivariate time series prediction. IEEE Transactions on Fuzzy Systems, 2020, 29(9): 2647-2660 [45] Wang Y H, Yu F S, Homenda W, Pedrycz W, Tang Y Q, Jastrzebska A, et al. The trend-fuzzy-granulation-based adaptive fuzzy cognitive map for long-term time series forecasting. IEEE Transactions on Fuzzy Systems, 2022, 30(12): 5166-5180 doi: 10.1109/TFUZZ.2022.3169624 [46] Hebb D O. The Organization of Behavior: A Neuropsychological Theory. New York: Psychology Press, 2002. [47] Dickerson J A, Kosko B. Virtual worlds as fuzzy cognitive maps. Presence: Teleoperators and Virtual Environments, 1994, 3(2): 173-189 doi: 10.1162/pres.1994.3.2.173 [48] Huerga A V. A balanced differential learning algorithm in fuzzy cognitive maps. In: Proceedings of the 16th International Workshop on Qualitative Reasoning. 2002. 1−7 [49] Papageorgiou E I, Stylios C D, Groumpos P P. Active Hebbian learning algorithm to train fuzzy cognitive maps. International Journal of Approximate Reasoning, 2004, 37(3): 219-249 doi: 10.1016/j.ijar.2004.01.001 [50] Papageorgiou E, Stylios C, Groumpos P. Fuzzy cognitive map learning based on nonlinear Hebbian rule. In: Proceedings of the 16th Australasian Joint Conference on Artificial Intelligence. Perth, Australia: Springer, 2003. 256−268 [51] Li S J, Shen R M. Fuzzy cognitive map learning based on improved nonlinear Hebbian rule. In: Proceedings of the IEEE International Conference on Machine Learning and Cybernetics. Shanghai, China: IEEE, 2004. 2301−2306 [52] Stach W, Kurgan L, Pedrycz W. Data-driven nonlinear Hebbian learning method for fuzzy cognitive maps. In: Proceedings of the IEEE International Conference on Fuzzy Systems (IEEE World Congress on Computational Intelligence). Hong Kong, China: IEEE, 2008. 1975−1981 [53] 陈宁, 王磊, 彭俊洁, 刘波, 桂卫华. 基于模糊认知网络的改进非线性Hebbian算法. 控制理论与应用, 2016, 33(10): 1273-1280 doi: 10.7641/CTA.2016.50799Chen Ning, Wang Lei, Peng Jun-Jie, Liu Bo, Gui Wei-Hua. Improved nonlinear Hebbian learning algorithm based on fuzzy cognitive networks model. Control Theory & Applications, 2016, 33(10): 1273-1280 doi: 10.7641/CTA.2016.50799 [54] Carvalho J P, Tomé J. Qualitative optimization of fuzzy causal rule bases using fuzzy Boolean nets. Fuzzy Sets and Systems, 2007, 158(17): 1931-1946 doi: 10.1016/j.fss.2007.04.018 [55] Papageorgiou E I, Oikonomou P, Kannappan A. Bagged nonlinear Hebbian learning algorithm for fuzzy cognitive maps working on classification tasks. In: Proceedings of the 7th Hellenic Conference on Artificial Intelligence. Lamia, Greece: Springer, 2012. 157−164 [56] Mateou N H, Moiseos M, Andreou A S. Multi-objective evolutionary fuzzy cognitive maps for decision support. In: Proceedings of the IEEE Congress on Evolutionary Computation. Edinburgh, UK: IEEE, 2005. 824−830 [57] Stach W, Kurgan L, Pedrycz W, Reformat M. Genetic learning of fuzzy cognitive maps. Fuzzy Sets and Systems, 2005, 153(3): 371-401 doi: 10.1016/j.fss.2005.01.009 [58] Parsopoulos K E, Papageorgiou E I, Groumpos P P, Vrahatis M N. A first study of fuzzy cognitive maps learning using particle swarm optimization. In: Proceedings of the Congress on Evolutionary Computation, 2003. CEC'03. Canberra, Australia: IEEE, 2003. 1440−1447 [59] Oikonomou P, Papageorgiou E I. Particle swarm optimization approach for fuzzy cognitive maps applied to autism classification. In: Proceedings of the 9th IFIP International Conference on Artificial Intelligence Applications and Innovations. Paphos, Cyprus: Springer, 2013. 516−526 [60] Vaščák J. Approaches in adaptation of fuzzy cognitive maps for navigation purposes. In: Proceedings of the IEEE 8th International Symposium on Applied Machine Intelligence and Informatics (SAMI). Herlany, Slovakia: IEEE, 2010. 31−36 [61] Chen Y, Mazlack L, Lu L. Learning fuzzy cognitive maps from data by ant colony optimization. In: Proceedings of the 14th Annual Conference on Genetic and Evolutionary Computation. Philadelphia, USA: ACM, 2012. 9−16 [62] Yesil E, Ozturk C, Dodurka M F, Sakalli A. Fuzzy cognitive maps learning using artificial bee colony optimization. In: Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Hyderabad, India: IEEE, 2013. 1−8 [63] Ahmadi S, Forouzideh N, Alizadeh S, Papageorgiou E. Learning fuzzy cognitive maps using imperialist competitive algorithm. Neural Computing and Applications, 2015, 26(6): 1333-1354 doi: 10.1007/s00521-014-1797-4 [64] Juszczuk P, Froelich W. Learning fuzzy cognitive maps using a differential evolution algorithm. Polish Journal of Environmental Studies, 2009, 12(3B): Article No. 108 [65] Ghazanfari M, Alizadeh S, Fathian M, Koulouriotis D E. Comparing simulated annealing and genetic algorithm in learning FCM. Applied Mathematics and Computation, 2007, 192(1): 56-68 doi: 10.1016/j.amc.2007.02.144 [66] Alizadeh S, Ghazanfari M. Learning FCM by chaotic simulated annealing. Chaos, Solitons & Fractals, 2009, 41(3): 1182-1190 [67] Yesil E, Urbas L. Big bang-big crunch learning method for fuzzy cognitive maps. International Journal of Computer and Information Engineering, 2010, 4(11): 1756-1765 [68] Ahmadi S, Forouzideh N, Yeh C H, Martin R, Papageorgiou E. A first study of fuzzy cognitive maps learning using cultural algorithm. In: Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications. Hangzhou, China: IEEE, 2014. 2023−2028 [69] 胡运杰, 邓燕妮. 基于变异算子改进蚁群算法学习的模糊认知图. 科学技术与工程, 2018, 18(7): 203-207 doi: 10.3969/j.issn.1671-1815.2018.07.036Hu Yun-Jie, Deng Yan-Ni. Learning fuzzy cognitive maps by ant colony algorithm improved by mutation operator. Science Technology and Engineering, 2018, 18(7): 203-207 doi: 10.3969/j.issn.1671-1815.2018.07.036 [70] Zou X M, Liu J. A mutual information-based two-phase memetic algorithm for large-scale fuzzy cognitive map learning. IEEE Transactions on Fuzzy Systems, 2018, 26(4): 2120-2134 doi: 10.1109/TFUZZ.2017.2764445 [71] Salmeron J L, Mansouri T, Moghadam M R S, Mardani A. Learning fuzzy cognitive maps with modified asexual reproduction optimisation algorithm. Knowledge-Based Systems, 2019, 163: 723-735 doi: 10.1016/j.knosys.2018.09.034 [72] Chen Y, Mazlack L J, Minai A A, Lu L J. Inferring causal networks using fuzzy cognitive maps and evolutionary algorithms with application to gene regulatory network reconstruction. Applied Soft Computing, 2015, 37: 667-679 doi: 10.1016/j.asoc.2015.08.039 [73] Stach W, Kurgan L, Pedrycz W. A divide and conquer method for learning large fuzzy cognitive maps. Fuzzy Sets and Systems, 2010, 161(19): 2515-2532 doi: 10.1016/j.fss.2010.04.008 [74] Stach W, Kurgan L, Pedrycz W. Parallel learning of large fuzzy cognitive maps. In: Proceedings of the International Joint Conference on Neural Networks. Orlando, USA: 2007. 1584−1589 [75] Liu J, Chi Y X, Zhu C. A dynamic multiagent genetic algorithm for gene regulatory network reconstruction based on fuzzy cognitive maps. IEEE Transactions on Fuzzy Systems, 2016, 24(2): 419-431 doi: 10.1109/TFUZZ.2015.2459756 [76] Chi Y X, Liu J. Reconstructing gene regulatory networks with a memetic-neural hybrid based on fuzzy cognitive maps. Natural Computing, 2019, 18(2): 301-312 doi: 10.1007/s11047-016-9547-4 [77] Liu J, Chi Y X, Liu Z D, He S. Ensemble multi-objective evolutionary algorithm for gene regulatory network reconstruction based on fuzzy cognitive maps. CAAI Transactions on Intelligence Technology, 2019, 4(1): 24-36 doi: 10.1049/trit.2018.1059 [78] Liang W L, Zhang Y J, Liu X Q, Yin H, Wang J P, Yang Y Y. Towards improved multifactorial particle swarm optimization learning of fuzzy cognitive maps: a case study on air quality prediction. Applied Soft Computing, 2022, 130: Article No. 109708 doi: 10.1016/j.asoc.2022.109708 [79] Poczeta K, Kubuś Ł, Yastrebov A, Papageorgiou E I. Application of fuzzy cognitive maps with evolutionary learning algorithm to model decision support systems based on real-life and historical data. Recent Advances in Computational Optimization. Cham: Springer, 2018. 153−175 [80] Chi Y X, Liu J. Learning of fuzzy cognitive maps with varying densities using a multiobjective evolutionary algorithm. IEEE Transactions on Fuzzy Systems, 2016, 24(1): 71-81 doi: 10.1109/TFUZZ.2015.2426314 [81] Wu K, Liu J. Learning large-scale fuzzy cognitive maps based on compressed sensing and application in reconstructing gene regulatory networks. IEEE Transactions on Fuzzy Systems, 2017, 25(6): 1546-1560 doi: 10.1109/TFUZZ.2017.2741444 [82] Lu W, Feng G L, Liu X D, Pedrycz W, Zhang L Y, Yang J H. Fast and effective learning for fuzzy cognitive maps: a method based on solving constrained convex optimization problems. IEEE Transactions on Fuzzy Systems, 2020, 28(11): 2958-2971 doi: 10.1109/TFUZZ.2019.2946119 [83] Feng G L, Lu W, Pedrycz W, Yang J H, Liu X D. The learning of fuzzy cognitive maps with noisy data: a rapid and robust learning method with maximum entropy. IEEE Transactions on Cybernetics, 2021, 51(4): 2080-2092 doi: 10.1109/TCYB.2019.2933438 [84] Ding F Q, Luo C. Structured sparsity learning for large-scale fuzzy cognitive maps. Engineering Applications of Artificial Intelligence, 2021, 105: Article No. 104444 doi: 10.1016/j.engappai.2021.104444 [85] Vanhoenshoven F, Nápoles G, Froelich W, Salmeron J L, Vanhoof K. Pseudoinverse learning of fuzzy cognitive maps for multivariate time series forecasting. Applied Soft Computing, 2020, 95: Article No. 106461 doi: 10.1016/j.asoc.2020.106461 [86] Wu K, Liu J. Robust learning of large-scale fuzzy cognitive maps via the lasso from noisy time series. Knowledge-Based Systems, 2016, 113: 23-38 doi: 10.1016/j.knosys.2016.09.010 [87] Yang S C, Liu J. Time-series forecasting based on high-order fuzzy cognitive maps and wavelet transform. IEEE Transactions on Fuzzy Systems, 2018, 26(6): 3391-3402 doi: 10.1109/TFUZZ.2018.2831640 [88] Shen F, Liu J, Wu K. Multivariate time series forecasting based on elastic net and high-order fuzzy cognitive maps: a case study on human action prediction through EEG signals. IEEE Transactions on Fuzzy Systems, 2021, 29(8): 2336-2348 doi: 10.1109/TFUZZ.2020.2998513 [89] Gao R B, Du L, Yuen K F. Robust empirical wavelet fuzzy cognitive map for time series forecasting. Engineering Applications of Artificial Intelligence, 2020, 96: Article No. 103978 doi: 10.1016/j.engappai.2020.103978 [90] Liu Z D, Liu J. A robust time series prediction method based on empirical mode decomposition and high-order fuzzy cognitive maps. Knowledge-Based Systems, 2020, 203: Article No. 106105 doi: 10.1016/j.knosys.2020.106105 [91] Wu K, Liu J, Liu P H, Shen F. Online fuzzy cognitive map learning. IEEE Transactions on Fuzzy Systems, 2021, 29(7): 1885-1898 doi: 10.1109/TFUZZ.2020.2988845 [92] Papageorgiou E I, Groumpos P P. A new hybrid method using evolutionary algorithms to train fuzzy cognitive maps. Applied Soft Computing, 2005, 5(4): 409-431 doi: 10.1016/j.asoc.2004.08.008 [93] Zhu Y C, Zhang W. An integrated framework for learning fuzzy cognitive map using RCGA and NHL algorithm. In: Proceedings of the 4th International Conference on Wireless Communications, Networking and Mobile Computing. Dalian, China: IEEE, 2008. 1−5 [94] Yazdi M N, Lucas C. A hybrid method using PSO and NHL algorithms to train fuzzy cognitive maps. In: Proceedings of the 4th International IEEE Conference Intelligent Systems. Varna, Bulgaria: IEEE, 2008. 8−13 [95] Ren Z. Learning fuzzy cognitive maps by a hybrid method using nonlinear Hebbian learning and extended great deluge algorithm. In: Proceedings of the CEUR Workshop Proceedings, Proceedings of the 23rd Midwest Artificial Intelligence and Cognitive Science Conference. Cincinnati, USA: MAICS, 2012. 159−163 [96] Natarajan R, Subramanian J, Papageorgiou E I. Hybrid learning of fuzzy cognitive maps for sugarcane yield classification. Computers and Electronics in Agriculture, 2016, 127: 147-157 doi: 10.1016/j.compag.2016.05.016 [97] Madeiro S S, Von Zuben F J. Gradient-based algorithms for the automatic construction of fuzzy cognitive maps. In: Proceedings of the 11th International Conference on Machine Learning and Applications. Boca Raton, USA: IEEE, 2012. 344−349 [98] 李慧, 陈红倩, 马丽仪, 梁磊, 孙旸. 模糊认知图的算法改进与应用综述. 南京大学学报(自然科学), 2016, 52(4): 746-761Li Hui, Chen Hong-Qian, Ma Li-Yi, Liang Lei, Sun Yang. A review of algorithm improvement and application of fuzzy cognitive map. Journal of Nanjing University (Natural Sciences), 2016, 52(4): 746-761 [99] Wu K, Liu J. Learning large-scale fuzzy cognitive maps under limited resources. Engineering Applications of Artificial Intelligence, 2022, 116: Article No. 105376 doi: 10.1016/j.engappai.2022.105376 [100] Hatwágner M F, Kóczy L T. Parameterization and concept optimization of FCM models. In: Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Istanbul, Turkey: IEEE, 2015. 1−8 [101] Hatwágner M F, Yesil E, Dodurka M F, Papageorgiou E, Urbas L, Kóczy L T. Two-stage learning based fuzzy cognitive maps reduction approach. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 2938-2952 doi: 10.1109/TFUZZ.2018.2793904 [102] Liu J, Chi Y X, Zhu C, Jin Y C. A time series driven decomposed evolutionary optimization approach for reconstructing large-scale gene regulatory networks based on fuzzy cognitive maps. BMC Bioinformatics, 2017, 18(1): Article No. 241 doi: 10.1186/s12859-017-1657-1 [103] Yang Z, Liu J. Learning of fuzzy cognitive maps using a niching-based multi-modal multi-agent genetic algorithm. Applied Soft Computing, 2019, 74: 356-367 doi: 10.1016/j.asoc.2018.10.038 [104] Haritha K, Judy M V, Papageorgiou K, Papageorgiou E. Distributed genetic algorithm for community detection in large graphs with a parallel fuzzy cognitive map for focal node identification. Applied Sciences, 2023, 13(15): Article No. 8735 doi: 10.3390/app13158735 [105] Douali N, Papageorgiou E I, De Roo J, Cools H, Jaulent M C. Clinical decision support system based on fuzzy cognitive maps. Journal of Computer Science & Systems Biology, 2015, 8(1): 112-120 [106] Zhai D S, Chang Y N, Zhang J. An application of fuzzy cognitive map based on active Hebbian learning algorithm in credit risk evaluation of listed companies. In: Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence. Shanghai, China: IEEE, 2009. 89−93 [107] Kannappan A, Tamilarasi A, Papageorgiou E I. Analyzing the performance of fuzzy cognitive maps with non-linear Hebbian learning algorithm in predicting autistic disorder. Expert Systems with Applications, 2011, 38(3): 1282-1292 doi: 10.1016/j.eswa.2010.06.069 [108] Beena P, Ganguli R. Structural damage detection using fuzzy cognitive maps and Hebbian learning. Applied Soft Computing, 2011, 11(1): 1014-1020 doi: 10.1016/j.asoc.2010.01.023 [109] Anninou A P, Groumpos P P. Modeling of Parkinson's disease using fuzzy cognitive maps and non-linear Hebbian learning. International Journal on Artificial Intelligence Tools, 2014, 23(5): Article No. 1450010 doi: 10.1142/S0218213014500109 [110] Antigoni A P, Peter G P. Non linear Hebbian learning techniques and fuzzy cognitive maps in modeling the Parkinson's disease. In: Proceedings of the 21st Mediterranean Conference on Control and Automation. Platanias, Greece: IEEE, 2013. 709−715 [111] Sivabalaselvamani D, Harishankher A S, Rahunathan L, Tamilarasi A. Accident identification using fuzzy cognitive maps with adaptive non-linear Hebbian learning algorithm. In: Proceedings of the International Conference on Intelligent Computing Systems (ICICS 2017-Dec 15th-16th 2017) Organized by Sona College of Technology. Salem, India: 2017. [112] Senniappan V, Subramanian J, Papageorgiou E I, Mohan S. Application of fuzzy cognitive maps for crack categorization in columns of reinforced concrete structures. Neural Computing & Applications, 2017, 28: 107-117 [113] Subramanian J, Karmegam A, Papageorgiou E, Papandrianos N, Vasukie A. An integrated breast cancer risk assessment and management model based on fuzzy cognitive maps. Computer Methods and Programs in Biomedicine, 2015, 118(3): 280-297 doi: 10.1016/j.cmpb.2015.01.001 [114] Chen J, Gao X D, Rong J, Gao X G. A situation awareness assessment method based on fuzzy cognitive maps. Journal of Systems Engineering and Electronics, 2022, 33(5): 1108-1122 doi: 10.23919/JSEE.2022.000108 [115] Orang O, de Lima e Silva P C, Guimarães F G. Time series forecasting using fuzzy cognitive maps: A survey. Artificial Intelligence Review, 2023, 56(8): 7733-7794 doi: 10.1007/s10462-022-10319-w [116] Froelich W, Papageorgiou E I. Extended evolutionary learning of fuzzy cognitive maps for the prediction of multivariate time-series. Fuzzy Cognitive Maps for Applied Sciences and Engineering. Berlin, Heidelberg: Springer, 2014. 121−131 [117] Luo C, Zhang N N, Wang X Y. Time series prediction based on intuitionistic fuzzy cognitive map. Soft Computing, 2020, 24(9): 6835-6850 doi: 10.1007/s00500-019-04321-8 [118] Liu X Q, Zhang Y J, Wang J P, Huang H, Yin H. Multi-source and multivariate ozone prediction based on fuzzy cognitive maps and evidential reasoning theory. Applied Soft Computing, 2022, 119: Article No. 108600 doi: 10.1016/j.asoc.2022.108600 [119] Qin D W, Peng Z, Wu L F. Deep attention fuzzy cognitive maps for interpretable multivariate time series prediction. Knowledge-Based Systems, 2023, 275: Article No. 110700 doi: 10.1016/j.knosys.2023.110700 [120] Homenda W, Jastrzebska A, Pedrycz W. Joining concept's based fuzzy cognitive map model with moving window technique for time series modeling. In: Proceedings of the 13th IFIP International Conference on Computer Information Systems and Industrial Management. Ho Chi Minh City, Vietnam: Springer, 2014. 397−408 [121] Yuan K X, Liu J, Yang S C, Wu K, Shen F. Time series forecasting based on kernel mapping and high-order fuzzy cognitive maps. Knowledge-Based Systems, 2020, 206: Article No. 106359 doi: 10.1016/j.knosys.2020.106359 [122] Feng G L, Zhang L Y, Yang J H, Lu W. Long-term prediction of time series using fuzzy cognitive maps. Engineering Applications of Artificial Intelligence, 2021, 102: Article No. 104274 doi: 10.1016/j.engappai.2021.104274 [123] Wu K, Liu J, Liu P H, Yang S C. Time series prediction using sparse autoencoder and high-order fuzzy cognitive maps. IEEE Transactions on Fuzzy Systems, 2020, 28(12): 3110-3121 [124] Feng G L, Lu W, Yang J H. Time series modeling with fuzzy cognitive maps based on partitioning strategies. In: Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Luxembourg: IEEE, 2021. 1−6 [125] Feng G L, Lu W, Yang J H. The modeling of time series based on least square fuzzy cognitive map. Algorithms, 2021, 14(3): Article No. 69 doi: 10.3390/a14030069 [126] Wang Y H, Yu F S, Homenda W, Pedrycz W, Jastrzebska A, Wang X. Training novel adaptive fuzzy cognitive map by knowledge-guidance learning mechanism for large-scale time-series forecasting. IEEE Transactions on Cybernetics, 2023, 53(7): 4665-4676 doi: 10.1109/TCYB.2021.3132704 [127] Salmeron J L, Froelich W. Dynamic optimization of fuzzy cognitive maps for time series forecasting. Knowledge-Based Systems, 2016, 105: 29-37 doi: 10.1016/j.knosys.2016.04.023 [128] Homenda W, Jastrzebska A. Clustering techniques for fuzzy cognitive map design for time series modeling. Neurocomput- ing, 2017, 232: 3−15 [129] Szwed P. Classification and feature transformation with fuzzy cognitive maps. Applied Soft Computing, 2021, 105: Article No. 107271 doi: 10.1016/j.asoc.2021.107271 [130] Wu K, Yuan K X, Teng Y Z, Liu J, Jiao L C. Broad fuzzy cognitive map systems for time series classification. Applied Soft Computing, 2022, 128: Article No. 109458 doi: 10.1016/j.asoc.2022.109458 [131] Jastrzebska A, Nápoles G, Homenda W, Vanhoof K. Fuzzy cognitive map-driven comprehensive time-series classification. IEEE Transactions on Cybernetics, 2023, 128(2): 1348-1359 [132] Zhou X, Zhang H X. An algorithm of text categorization based on similar rough set and fuzzy cognitive map. In: Proceedings of the Fifth International Conference on Fuzzy Systems and Knowledge Discovery. Jinan, China: IEEE, 2008. 127−131 [133] Kannappan A, Papageorgiou E I. A new classification scheme using artificial immune systems learning for fuzzy cognitive mapping. In: Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Hyderabad, India: IEEE, 2013. 1−8 [134] Froelich W, Wakulicz-Deja A. Mining temporal medical data using adaptive fuzzy cognitive maps. In: Proceedings of the 2nd Conference on Human System Interactions. Catania, Italy: IEEE, 2009. 16−23 [135] Froelich W, Papageorgiou E I, Samarinas M, Skriapas K. Application of evolutionary fuzzy cognitive maps to the long-term prediction of prostate cancer. Applied Soft Computing, 2012, 12(12): 3810-3817 doi: 10.1016/j.asoc.2012.02.005 [136] Papageorgiou E I, Poczȩta K, Laspidou C. Application of fuzzy cognitive maps to water demand prediction. In: Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Istanbul, Turkey: IEEE, 2015. 1−8 [137] Poczeta K, Papageorgiou E I, Gerogiannis V C. Fuzzy cognitive maps optimization for decision making and prediction. Mathematics, 2020, 8(11): Article No. 2059 doi: 10.3390/math8112059 [138] Trappey A J C, Trappey C V, Wu C R. Genetic algorithm dynamic performance evaluation for rfid reverse logistic management. Expert Systems with Applications, 2010, 37(11): 7329-7335 doi: 10.1016/j.eswa.2010.04.026 [139] Georgopoulos V C, Stylios C D. Diagnosis support using fuzzy cognitive maps combined with genetic algorithms. In: Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Minneapolis, USA: IEEE, 2009. 6226−6229 [140] Homenda W, Jastrzebska A. Clustering techniques for fuzzy cognitive map design for time series modeling. Neurocomputing, 2017, 232: 3−15 [141] Qiao B H, Liu J, Wu P, Teng Y Z. Wind power forecasting based on variational mode decomposition and high-order fuzzy cognitive maps. Applied Soft Computing, 2022, 129: Article No. 109586 doi: 10.1016/j.asoc.2022.109586 [142] Li Y F, Liu J, Teng Y Z. A decomposition-based memetic neural architecture search algorithm for univariate time series forecasting. Applied Soft Computing, 2022, 130: Article No. 109714 doi: 10.1016/j.asoc.2022.109714 [143] Xia Y R, Wang J Z, Zhang Z Y, Wei D X, Yin L. Short-term PV power forecasting based on time series expansion and high- order fuzzy cognitive maps. Applied Soft Computing, 2023, 135: Article No. 110037 [144] Mohr S T. Software Design for a Fuzzy Cognitive Map Modeling Tool, Technical Report 66.698 Master's Project, Rensselaer Polytechnic Institute, USA, 1997. [145] The website of FCMappers. Net [Online], available: http://www.fcmappers.net/joomla/, June 19, 2023 [146] León M, Nápoles G, Rodriguez C, García M M, Bello R, Vanhoof K. A fuzzy cognitive maps modeling, learning and simulation framework for studying complex system. In: Proceedings of the 4th International Work-Conference on the Interplay Between Natural and Artificial Computation. La Palma, Spain: Springer, 2011. 243−256 [147] Jose A, Contreras J. The FCM designer tool. Fuzzy Cognitive Maps. Berlin, Heidelberg: Springer, 2010. 71−87 [148] Aguilar J. Multilayer cognitive maps in the resolution of problems using the FCM designer tool. Applied Artificial Intelligence, 2016, 30(7): 720-743 doi: 10.1080/08839514.2016.1214422 [149] Gray S A, Gray S, Cox L J, Henly-Shepard S. Mental modeler: A fuzzy-logic cognitive mapping modeling tool for adaptive environmental management. In: Proceedings of the 46th Hawaii International Conference on System Sciences. Wailea, USA: IEEE, 2013. 965−973 [150] De Franciscis D. JFCM: A Java library for FuzzyCognitive maps. Fuzzy Cognitive Maps for Applied Sciences and Engineering. Berlin, Heidelberg: Springer, 2014. 199−220 [151] Poczta K, Yastrebov A, Papageorgiou E I. Learning fuzzy cognitive maps using structure optimization genetic algorithm. In: Proceedings of the Federated Conference on Computer Science and Information Systems (FedCSIS). Lodz, Poland: IEEE, 2015. 547−554 [152] Papageorgiou E I, Poczeta K, Laspidou C. Hybrid model for water demand prediction based on fuzzy cognitive maps and artificial neural networks. In: Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Vancouver, Canada: IEEE, 2016. 1523−1530 [153] Hagan M T, Menhaj M B. Training feedforward networks with the marquardt algorithm. IEEE Transactions on Neural Networks, 1994, 5(6): 989-993 doi: 10.1109/72.329697 [154] Nápoles G, Leon M, Grau I, Vanhoof K. Fuzzy cognitive maps tool for scenario analysis and pattern classification. In: Proceedings of the IEEE 29th International Conference on Tools With Artificial Intelligence (ICTAI). Boston, USA: IEEE, 2017. 644−651 [155] Nápoles G, Grau I, Bello R, Grau R. Two-steps learning of fuzzy cognitive maps for prediction and knowledge discovery on the hiv-1 drug resistance. Expert Systems with Applications, 2014, 41(3): 821-830 doi: 10.1016/j.eswa.2013.08.012 [156] Nápoles G, Bello R, Vanhoof K. How to improve the convergence on sigmoid fuzzy cognitive maps?. Intelligent Data Analysis, 2014, 18(6S): S77-S88 doi: 10.3233/IDA-140710 [157] Nápoles G, Papageorgiou E, Bello R, Vanhoof K. On the convergence of sigmoid fuzzy cognitive maps. Information Sciences, 2016, 349-350: 154-171 doi: 10.1016/j.ins.2016.02.040 [158] Mkhitaryan S, Giabbanelli P, Wozniak M K, Nápoles G, De Vries N, Crutzen R. FCMpy: A python module for constructing and analyzing fuzzy cognitive maps. PeerJ Computer Science, 2022, 8: Article No. e1078 doi: 10.7717/peerj-cs.1078 -

 下载:
下载:



计量
- 文章访问数: 1329
- HTML全文浏览量: 1136
- PDF下载量: 483
- 被引次数: 0
