

-
摘要: 本文研究了一类具有边界执行器动态特性的双曲线型偏微分方程(Partial differential equation, PDE)系统的输出调节问题. 特别地, 执行器由一组非线性常微分方程(Ordinary differential equation, ODE)描述, 控制输入出现在执行器的一端而非直接作用在PDE系统上, 这使得控制任务变得相当困难. 基于几何设计方法和有限维与无限维反步法, 本文提出了显式表达的输出调节器, 实现了该类系统的扰动补偿及跟踪控制. 并且我们采用Lyapunov稳定性理论严格证明了闭环系统及跟踪误差在范数意义上的指数稳定性. 仿真实例对比验证了所提出控制方法的有效性.Abstract: This paper investigates the output regulation problem for a class of hyperbolic partial differential equation (PDE) systems with boundary actuator dynamics. Particularly, the control input appears at one end of the actuator described by a set of ordinary differential equation (ODE) rather than directly in the PDE system, which makes the control task rather difficult. Based on the geometric design method as well as finite and infinite dimensional backstepping methods, an output regulator is explicitly provided in the paper so that the disturbance compensation and tracking control of this system are implemented. Moreover, we rigorously prove the exponential stability of both the closed-loop system and the tracking error in the norm by employing the Lyapunov stability theory. The simulation example comparatively demonstrates the effectiveness of the proposed control method.1)
1 1 本文使用的符号说明如下: $ {\bf{R}} $为所有实数的集合; $ {\bf{C}} $为所有复数的集合; ${\rm{C}}^{n} $表示${n} $阶连续可微;$ \left|\cdot\right| $表示欧几里得范数; 对于一个时变的信号$ \omega \left( {x,t} \right) \in {\bf{R}}, x \in \left[0,1\right] $, 令$ \left\| {\omega \left( x \right)} \right\|_{L_2} = \sqrt {\int_0^1 {{\omega ^2}\left( x \right)\mathrm{d}x} } $表示其$ L_2 $范数. 此外, 令$ {v_x}\left( {x,t} \right) $和$ {v_t}\left( {x,t} \right) $分别表示偏导$ \frac{{\partial v\left( {x,t} \right)}}{{\partial x}} $和$ \frac{{\partial v\left( {x,t} \right)}}{{\partial t}} $. 为避免混淆, 时间和空间变量在一些函数中常被忽略, 例如: $ v\left( {x,t} \right) = $$ v\left( x \right),v\left( {x,t} \right) = v $. -
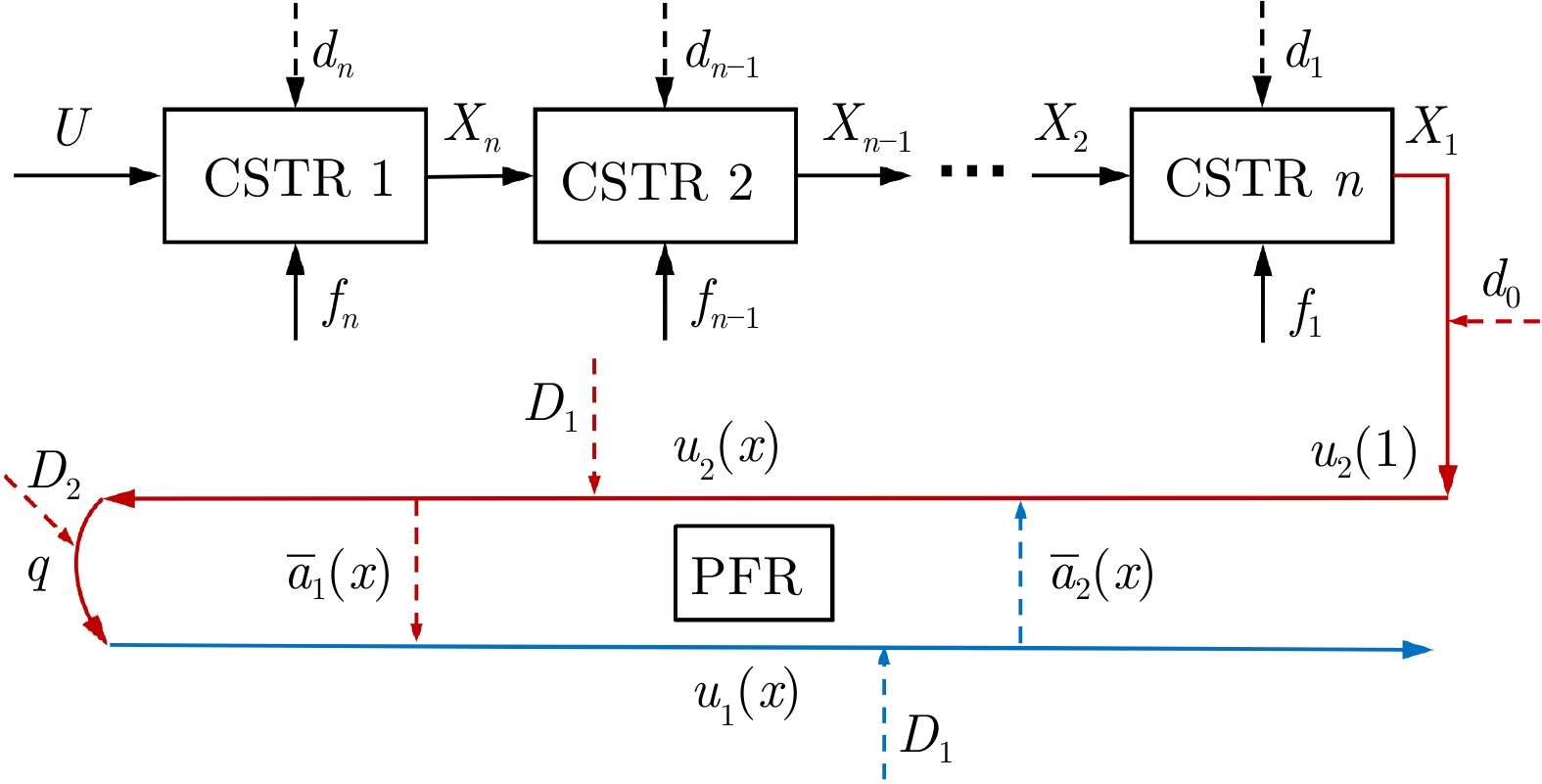
图 1 一类典型的流程工业多反应器串联系统信号流图
Fig. 1 A typical signal flow graph of multi-reactor series system in process industry
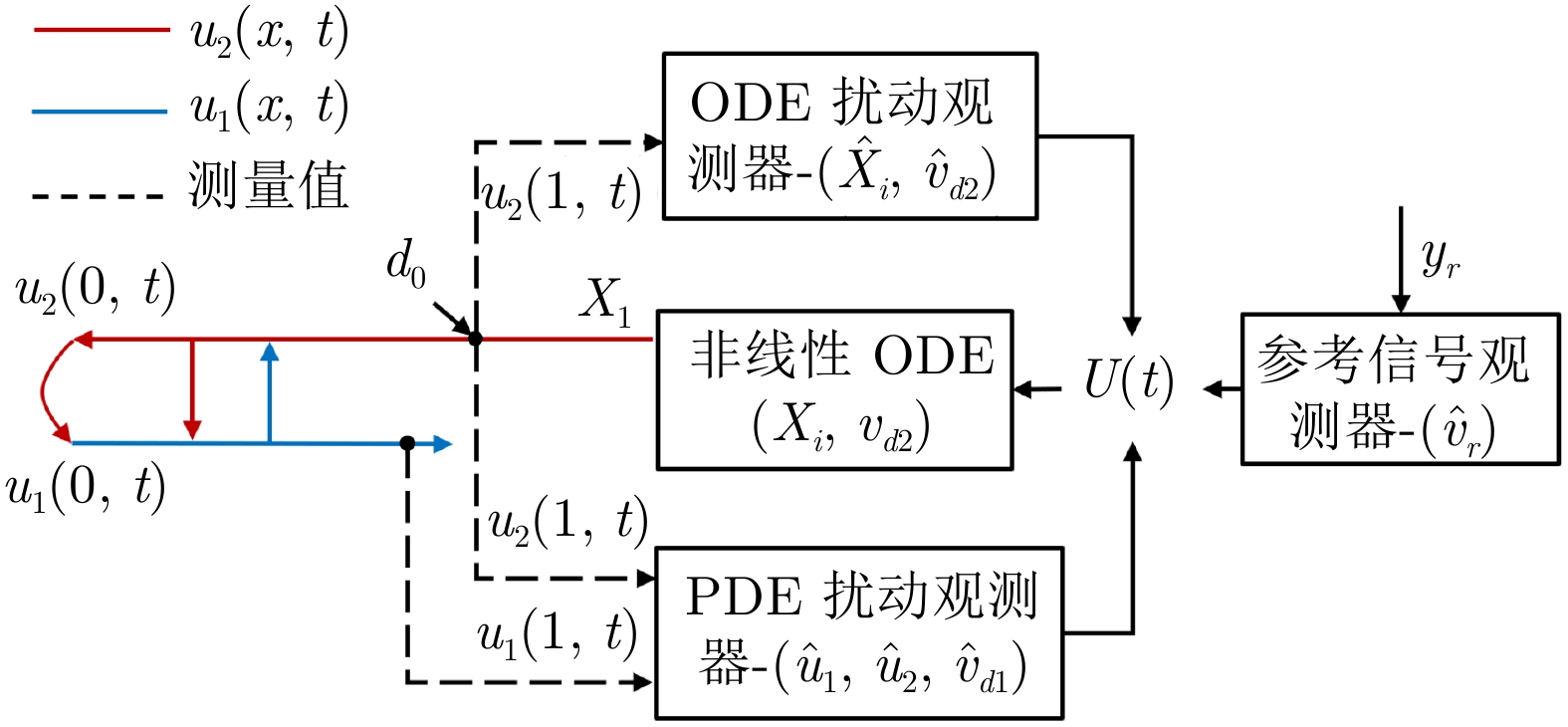
图 2 输出反馈闭环控制系统结构框图
Fig. 2 The block diagram of output-feedback closed-loop control system

图 3 状态反馈控制下的被控输出$y\left(t\right)$及参考信号$y_r\left(t\right) = 2\cos \left(t\right)$
Fig. 3 The controlled output $y\left(t\right)$ under the state-feedback control and the reference signal $y_r\left(t\right) = 2\cos \left(t\right)$
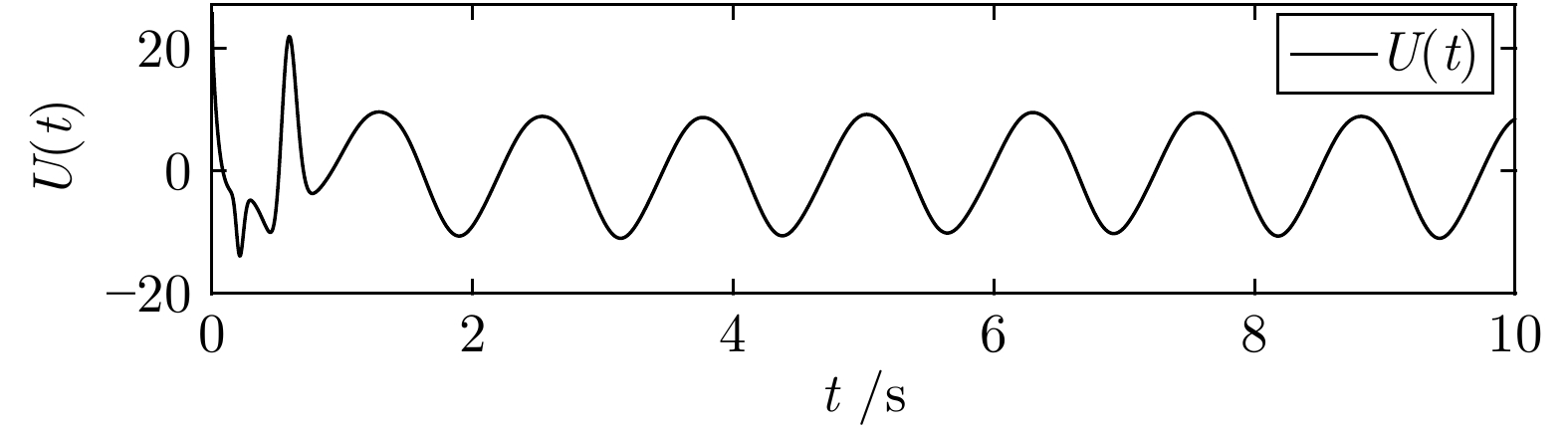
图 4 状态反馈控制器$U\left(t\right)$轨迹
Fig. 4 The trajectory of state-feedback controller $U\left(t\right)$

图 5 输出反馈控制下的被控输出$y\left(t\right)$及参考信号$y_r\left(t\right) = 2\cos \left(t\right)$
Fig. 5 The controlled output $y\left(t\right)$ under the output-feedback control and the reference signal $y_r\left(t\right) = 2\cos \left(t\right)$
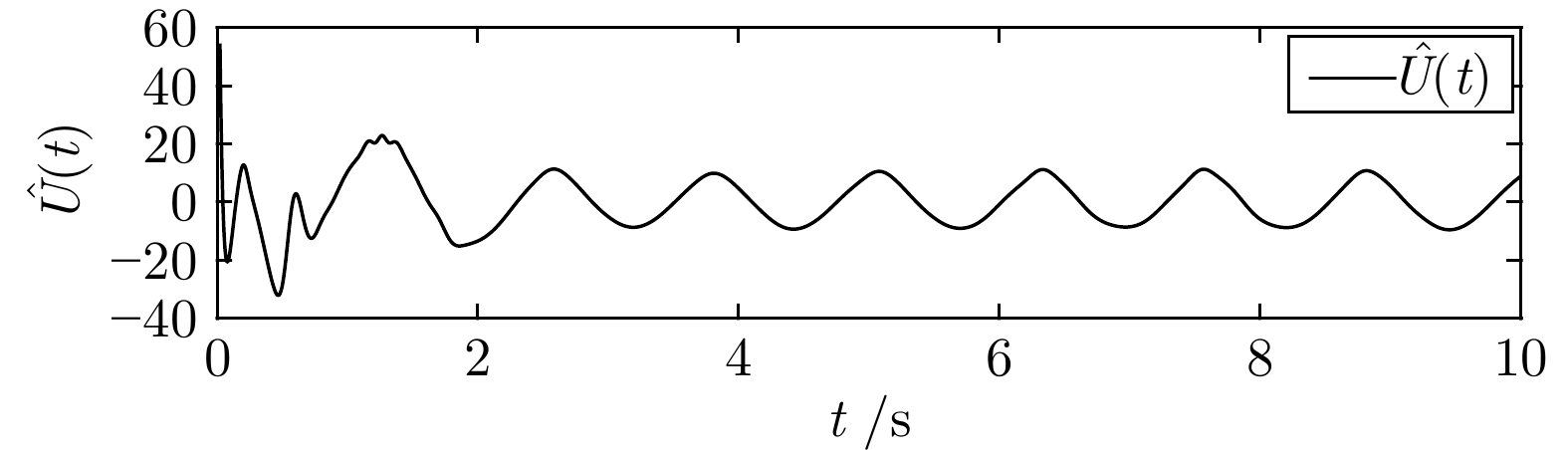
图 6 输出反馈控制器$\hat U\left(t\right)$轨迹
Fig. 6 The trajectory of output-feedback controller $\hat U\left(t\right)$
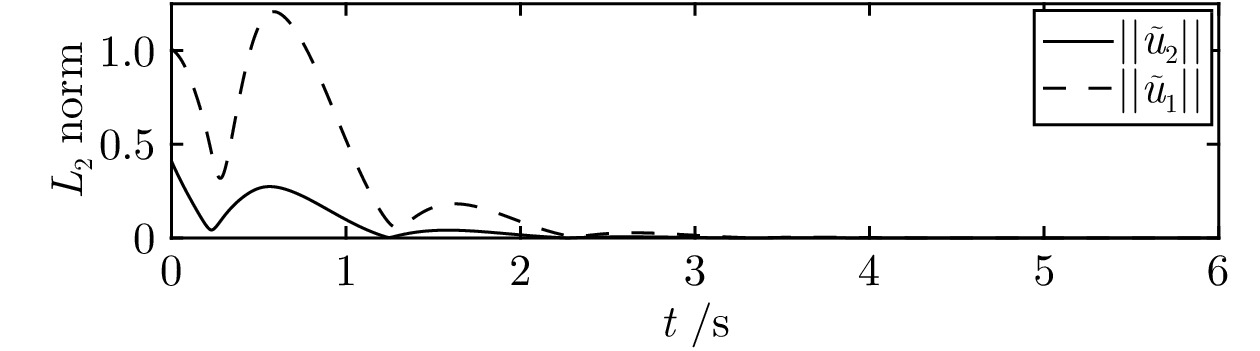
图 7 PDE子系统观测误差的范数$\left\| {{{\tilde u}_1}} \right\|$和$\left\| {{{\tilde u}_2}} \right\|$
Fig. 7 The norms $\left\| {{{\tilde u}_1}} \right\|$ and $\left\| {{{\tilde u}_2}} \right\|$ of observer errors of PDE subsystem
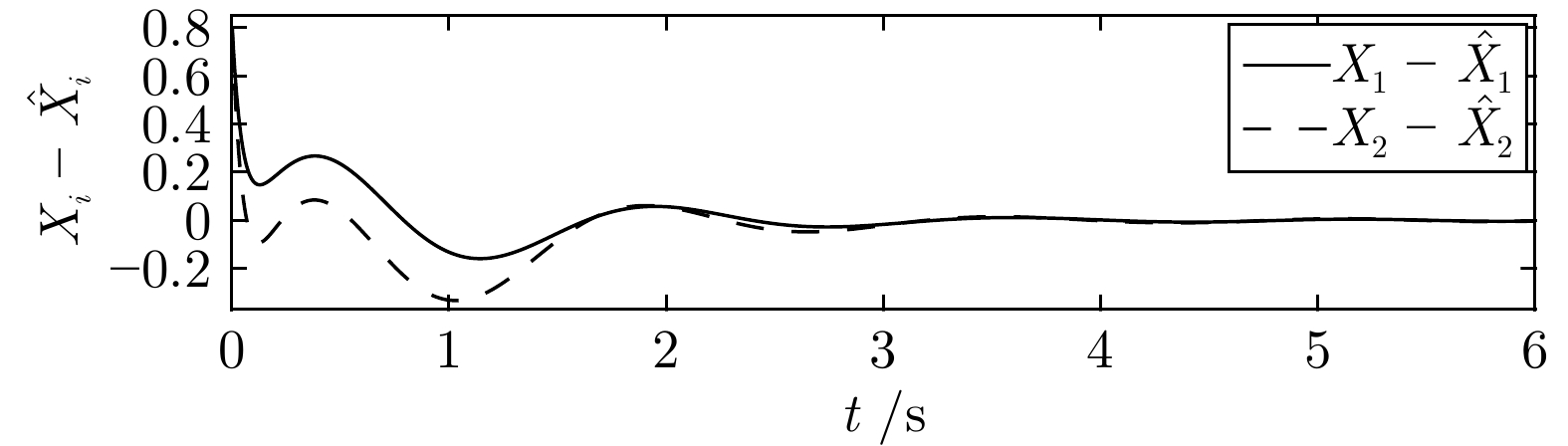
图 8 执行器状态观测误差${X_1} - {{\hat X}_1}$和${X_2} - {{\hat X}_2}$
Fig. 8 The observer errors ${X_1} - {{\hat X}_1}$ and ${X_2} - {{\hat X}_2}$ of actuator states

图 9 PDE子系统受到的常值扰动${D_i} = Q_i^\mathrm{T}{v_{d1}},i = 1, 2 ,3$及相应的扰动观测值${\hat D_i} = Q_i^\mathrm{T}{\hat v_{d1}},i = 1, 2 ,3$
Fig. 9 The constant perturbations ${D_i} = Q_i^\mathrm{T} {v_{d1}}$, $i = 1, 2 ,3$ to PDE subsystem and the corresponding disturbance observations ${\hat D_i} = Q_i^\mathrm{T}{\hat v_{d1}},i = 1, 2 ,3$
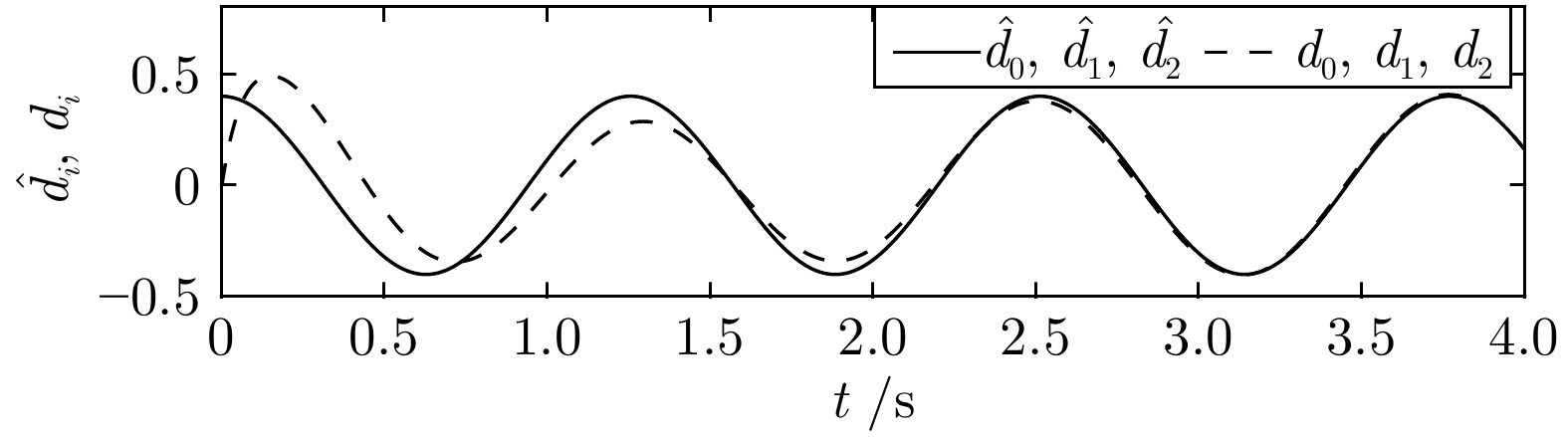
图 10 执行器受到的周期性扰动${d_i} = q_i^\mathrm{T}{v_{d2}},i = 0,1 ,2$以及相应的扰动观测值${{\hat d}_i} = q_i^\mathrm{T}{{\hat v}_{d2}},i = 0,1 ,2$
Fig. 10 The periodic perturbations ${d_i} = q_i^\mathrm{T} {v_{d2}}$, $i = 0, 1 ,2$ to actuator and the corresponding disturbance observations ${{\hat d}_i} = q_i^\mathrm{T}{{\hat v}_{d2}}$, $i = 0, 1 ,2$

图 11 采用控制器(79)的系统被控输出 $y\left(t\right)$及参考信号$y_r\left(t\right) = 2\cos \left(t\right)$
Fig. 11 The system controlled output $y\left(t\right)$ and reference signal $y_r\left(t\right) = 2\cos \left(t\right)$ using the controller (79)
-
[1] Xu C, Sallet G. Exponential stability and transfer functions of processes governed by symmetric hyperbolic systems. ESAIM: Control, Optimisation and Calculus of Variations, 2002, 7: 421-442 doi: 10.1051/cocv:2002062 [2] Landet I S, Pavlov A, Aamo O M. Modeling and control of heave-induced pressure fluctuations in managed pressure drilling. IEEE Transaction Control System Technology, 2012, 21(4): 1340-1351 [3] Boskovic D M, Krstic M. Backstepping control of chemical tubular reactors. Computers & Chemical Engineering, 2002, 26(7-8): 1077-1085 [4] Deutscher J. Output regulation for general linear heterodirectional hyperbolic systems with spatially-varying coefficients. Automatica, 2017, 85: 34-42 doi: 10.1016/j.automatica.2017.07.027 [5] Xu X, Dubljevic S. Output regulation boundary control of first-order coupled linear mimo hyperbolic pide systems. International Journal of Control, 2020, 93(3): 410-23 doi: 10.1080/00207179.2018.1475749 [6] Deutscher J, Gehring N, Kern R. Output feedback control of general linear heterodirectional hyperbolic ode-pde-ode systems. Automatica, 2018, 95: 472-480 doi: 10.1016/j.automatica.2018.06.021 [7] Xu X, Dubljevic S. Output regulation for a class of linear boundary controlled first-order hyperbolic pide systems. Automatica, 2017, 85: 43-52 doi: 10.1016/j.automatica.2017.07.036 [8] Deutscher J, Gabriel J. Minimum time output regulation for general linear heterodirectional hyperbolic systems. International Journal of Control, 2020, 93(8): 1826-1838 doi: 10.1080/00207179.2018.1533648 [9] Zhang J, Qi J, Dubljevic S, Bo S. Output regulation for a first-order hyperbolic PIDE with state and sensor delays. European Journal of Control, 2022, 65: Article No. 100643 [10] Irscheid A, Deutscher J, Gehring N, Joachim R. Output regulation for general heterodirectional linear hyperbolic PDEs coupled with nonlinear ODEs. Automatica, 2023, 148: Article No. 110748 [11] Deutscher J. Finite-time output regulation for linear 2×2 hyperbolic systems using backstepping. Automatica, 2017, 75: 54-62 doi: 10.1016/j.automatica.2016.09.020 [12] Owens B A, Mann B P. Linear and nonlinear electromagnetic coupling models in vibration-based energy harvesting. Journal of Sound and Vibration, 2012, 331(4): 922-937 doi: 10.1016/j.jsv.2011.10.026 [13] Susto G A, Krstic M. Control of pde-ode cascades with neumann interconnections. Journal of Franklin Institute, 2010, 347(1): 284-314 doi: 10.1016/j.jfranklin.2009.09.005 [14] Xu X, Tian Y, Yuan Y, Luan X, Liu F, Dubljevic S. Output regulation of linearized column froth flotation process. IEEE Transaction Control System Technology, 2020 29(1): 249-262 [15] Li J, Wu Z, Liu Y. Adaptive stabilization for an uncertain reaction-diffusion equation with dynamic boundary condition at control end. System & Control Letters, 2022, 162, 105-180 [16] Liu W J, Krstic M. Backstepping boundary control of burgers’ equation with actuator dynamics. System & Control Letters, 2000, 41(4): 291-303 [17] Wang J, Krstic M. Output-feedback control of an extended class of sandwiched hyperbolic pde-ode systems. IEEE Transaction on Automatic Control, 2020, 66(6): 2588-2603 [18] Wang J, Krstic M. Delay-compensated control of sandwiched ode-pde-ode hyperbolic systems for oil drilling and disaster relief. Automatica, 2020, 120: 109-131 [19] Wang J, Krstic M. Event-triggered output-feedback backstepping control of sandwich hyperbolic pde systems. IEEE Transaction Automatic Control, 2022, 67(1): 220-235 doi: 10.1109/TAC.2021.3050447 [20] Wang J, Krstic M. Output feedback boundary control of a heat pde sandwiched between two odes. IEEE Transaction Automatic Control, 2019, 64(11): 4653-4660 doi: 10.1109/TAC.2019.2901704 [21] Li J, Wu Z, Wen C. Adaptive stabilization for a reaction-diffusion equation with uncertain nonlinear actuator dynamics. Automatica, 2021, 128: 109-594 [22] Xiao Y, Yuan Y, Yang C, Luo B, Xu X, Dubljevic S. Adaptive neural tracking control of a class of hyperbolic PDE with uncertain actuator dynamics. IEEE Transactions on Cybernetics, DOI: 10.1109/TCYB.2022.3223168 [23] Zhang B, Yang C, Zhu H, Shi P, Gui W. Controllable-domain-based fuzzy rule extraction for copper removal process control. IEEE transactions on fuzzy systems, 2017 26(3): 1744-1756 [24] Lin Z, Stoorvogel A A, Saberi A. Output regulation for linear systems subject to input saturation. Automatica, 1996, 32(1): 29-47 doi: 10.1016/0005-1098(95)00110-7 [25] Raghavan S, Hedrick J K. Observer design for a class of nonlinear systems. International Journal of Control, 1994, 59(2): 515-528 doi: 10.1080/00207179408923090 [26] Vazquez R, Krstic M, Coron J M. Backstepping boundary stabilization and state estimation of a 2 × 2 linear hyperbolic system. In: Proceedings of Conference on Decision and Control and European Control Conference. Orlando, USA: 2011. 4937−4942 [27] Kailath T. Linear Systems. Englewood Cliffs, NJ: Prentice Hall, 1980. [28] Khalil H. Nonlinear systems (3rd edition). NJ: Prentice Hall, 2002. -

 下载:
下载:


计量
- 文章访问数: 755
- HTML全文浏览量: 408
- PDF下载量: 201
- 被引次数: 0
