

Energy-saving Optimization Control for Connected Automated Electric Vehicles: State of the Art and Perspective
-
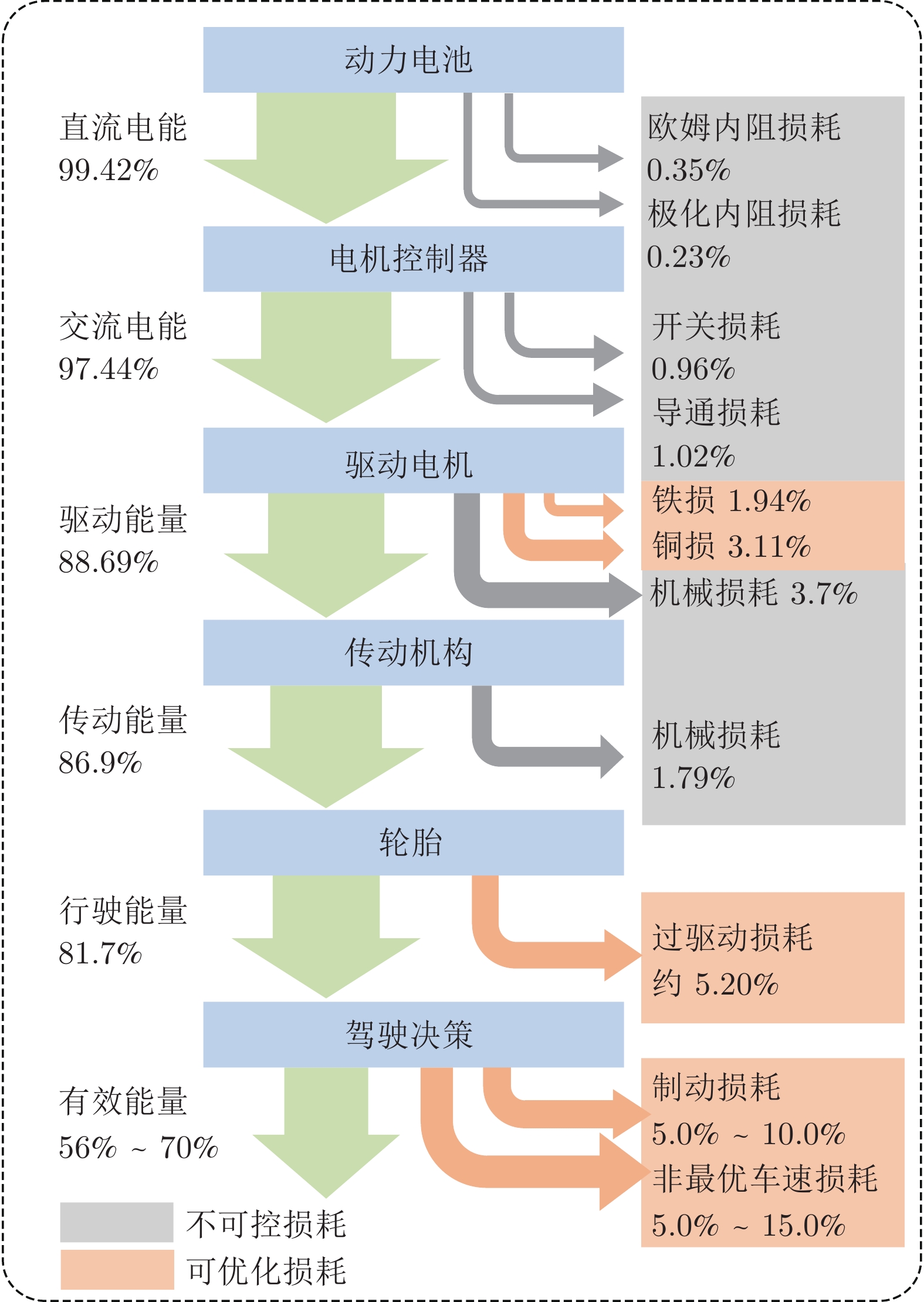
摘要: 提升纯电动汽车整车能效、降低百公里耗电量, 是我国新能源汽车产业发展的重大需求. 智能网联背景下, V2X (Vehicle to everything)网联信息以及激光雷达、毫米波雷达、摄像头、定位及导航装置等各类车载传感器, 为智能网联电动汽车(Connected automated electric vehicle, CAEV)提供了全方位的信息交互、共享和状态感知能力, 赋予了其巨大的节能优化潜力. 针对CAEV节能优化控制问题, 首先从动力电池、电机控制器、驱动电机、传动机构、轮胎和驾驶决策六个环节分析电动汽车的典型损耗特性, 从决策、控制和执行三个层面分析CAEV的能量转换过程及耦合关系, 以及网联信息对CAEV 的节能影响; 然后, 从决策层车速优化、控制层驱动/制动转矩优化控制和执行层电流矢量优化控制三个方面, 对各层的节能优化问题进行阐述, 并重点对国内外研究现状进行归纳分析; 最后, 对决策层、控制层和执行层CAEV节能优化控制的难点以及现有研究工作进行总结, 并对下一步发展趋势进行展望.Abstract: Improving the energy efficiency of electric vehicles and reducing the power consumption are major demands for the development of China's new energy vehicle industry. With the development of CAEV (connected automated electric vehicle), V2X (vehicle to everything) network information and various on-board sensors such as lidar, millimeter-wave radar, camera, positioning and navigation devices which provide CAEVs with a comprehensive information interaction, sharing and state perception capabilities, and endowed it with a huge potential for energy-saving optimization. Aiming at the energy-saving optimization control problem of CAEV, the typical loss characteristics of electric vehicles are firstly analyzed from the six links of power battery, motor controller, drive motor, transmission mechanism, tires and driving decision-making, and the energy conversion process and coupling relationship of CAEV are analyzed from three levels of decision-making, control and execution, as well as the energy-saving impact of network connection information on CAEV; Then, from the three aspects of vehicle speed optimization at the decision-making level, driving/braking torque optimization control at the control level, and current vector optimization control at the action level, the energy-saving optimization problems at each level are expounded, and the research works at home and abroad are analyzed in detail; Finally, we summarized the difficulties of energy-saving optimal control of CAEV at the decision-making level, the control level and the action level, as well as the characteristics of the existing research works, and the future development trend is prospected.
-
Key words:
- Intelligent connected /
- electric vehicle /
- energy-saving /
- optimization control
-
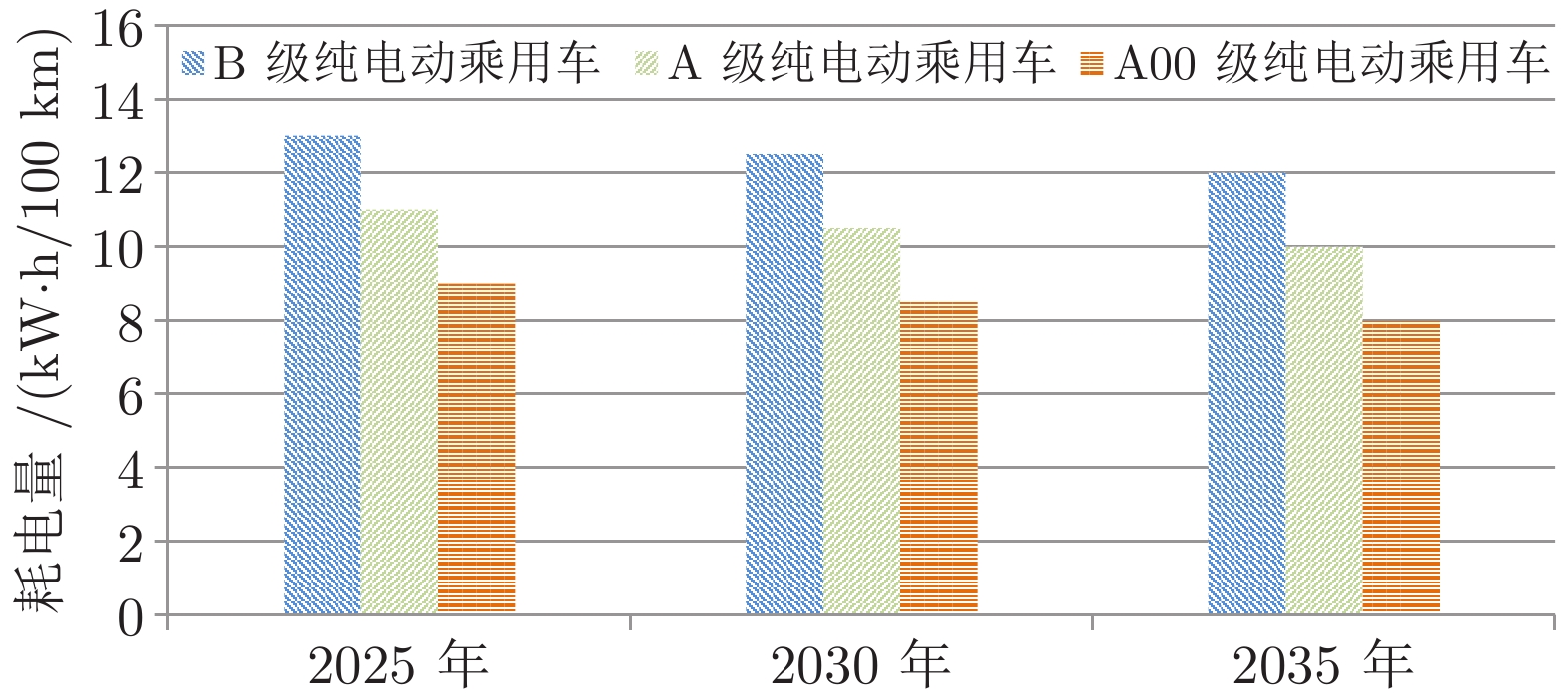
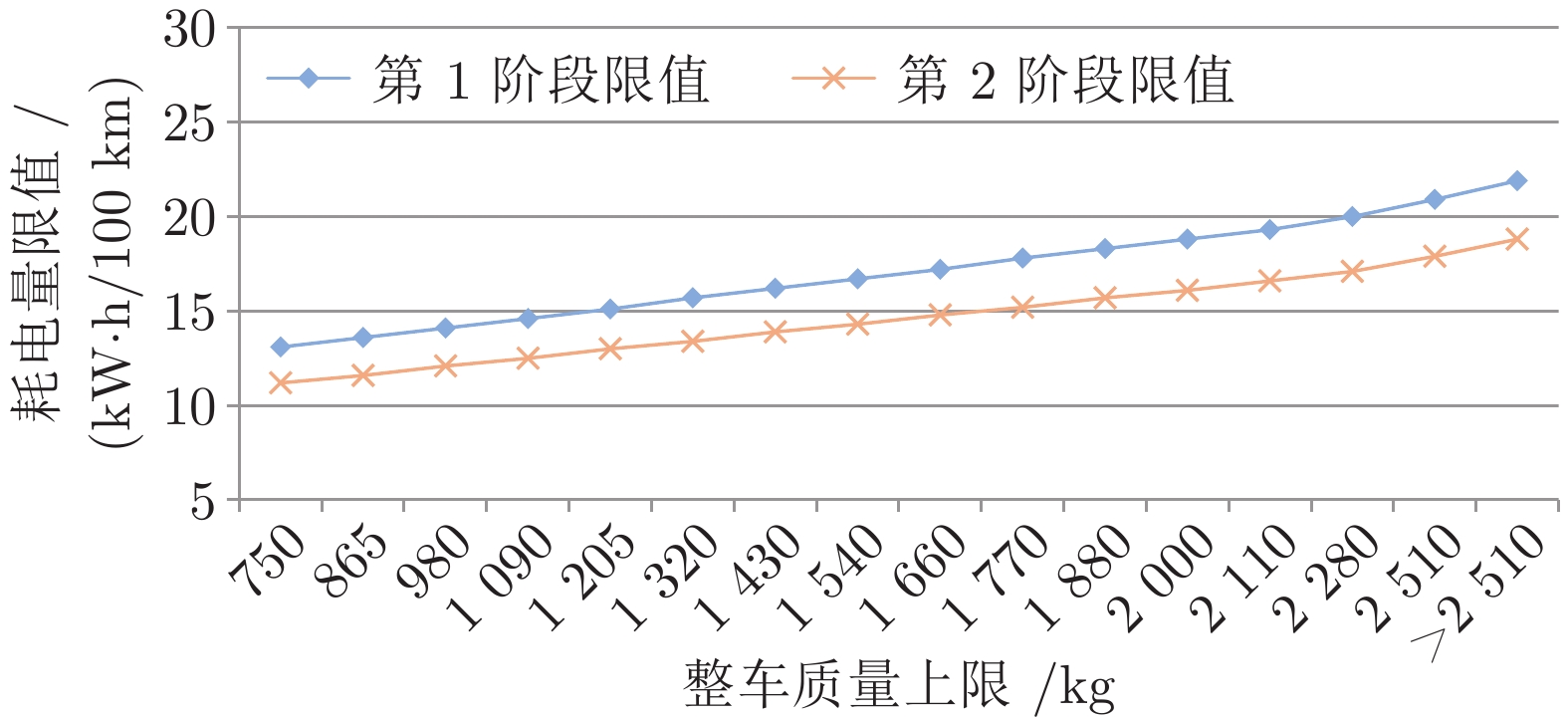
图 1 我国纯电动汽车能耗发展目标
Fig. 1 Energy consumption development goals for China's pure electric vehicles
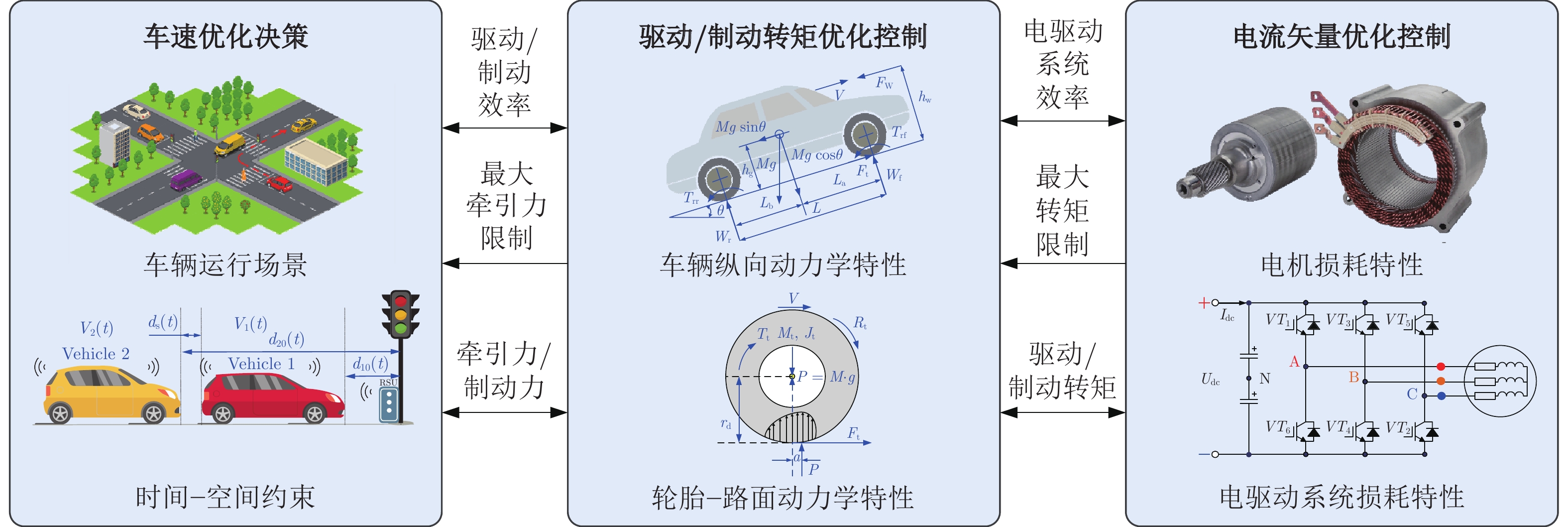
图 4 CAEV能量转换过程及耦合关系分析
Fig. 4 Analysis of energy conversion and coupling relationship of CAEV
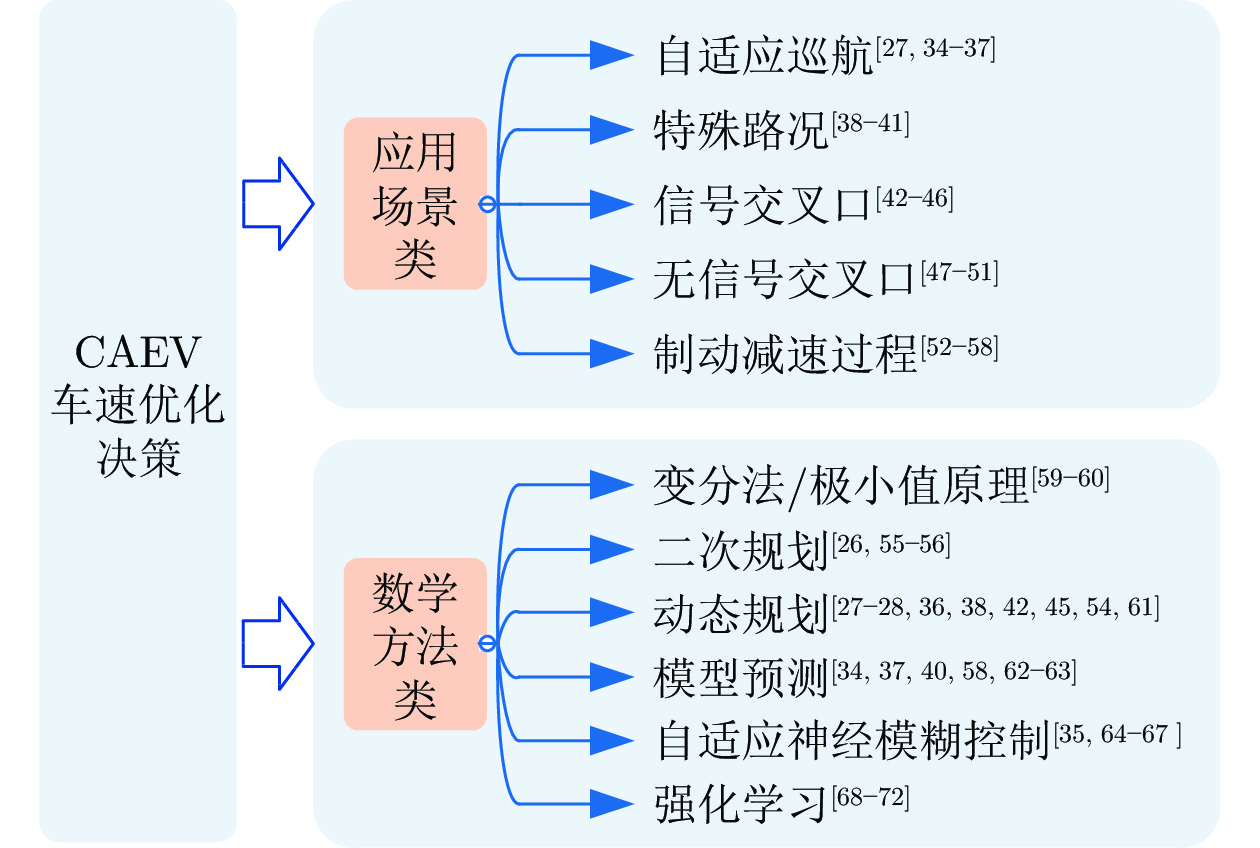
图 6 CAEV车速优化决策方法分类
Fig. 6 Classification of decision-making methods for speed optimization of CAEV
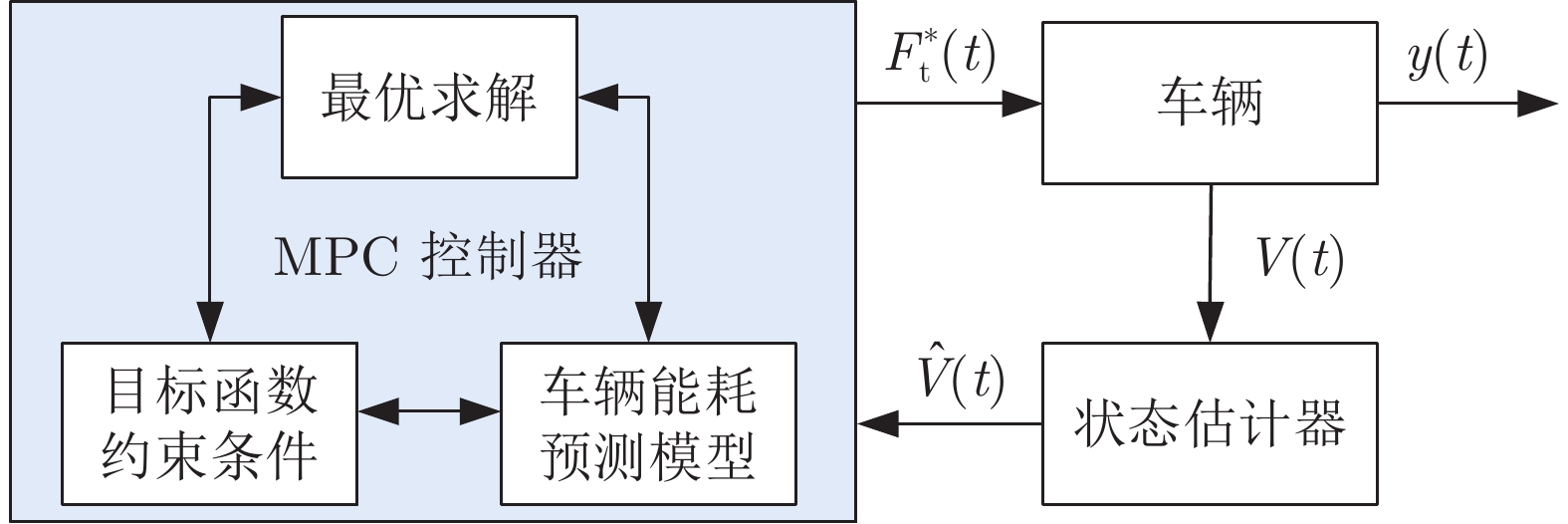
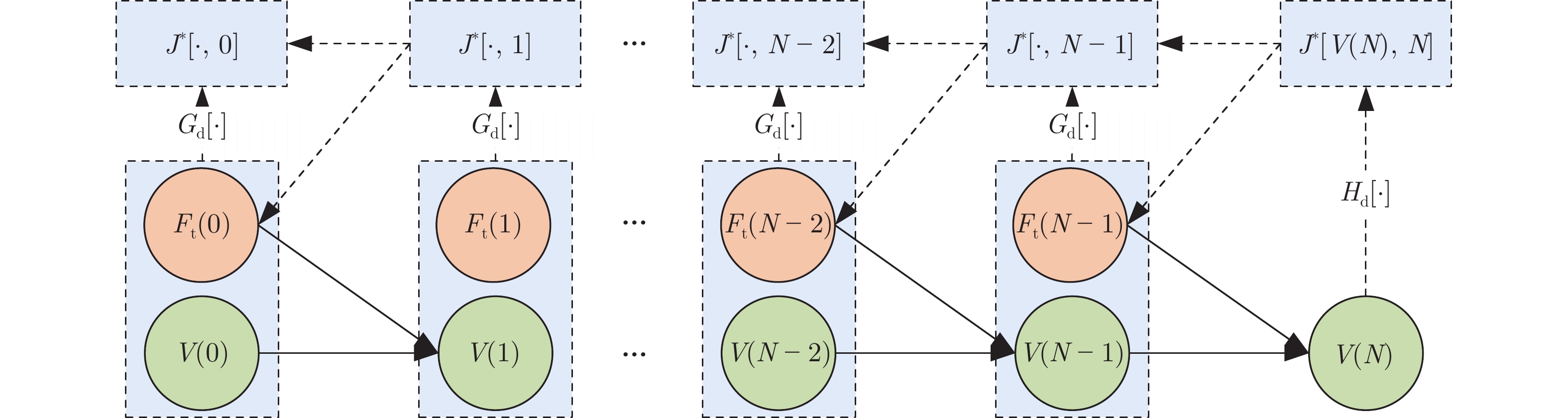
图 8 模型预测控制求解车速优化问题示意图
Fig. 8 Schematic diagram of MPC for solving vehicle speed optimization problem

图 10 电机输出转矩至车轮牵引力环节的能量转换过程示意图
Fig. 10 Schematic diagram of the energy conversion process from motor output torque to the wheel traction
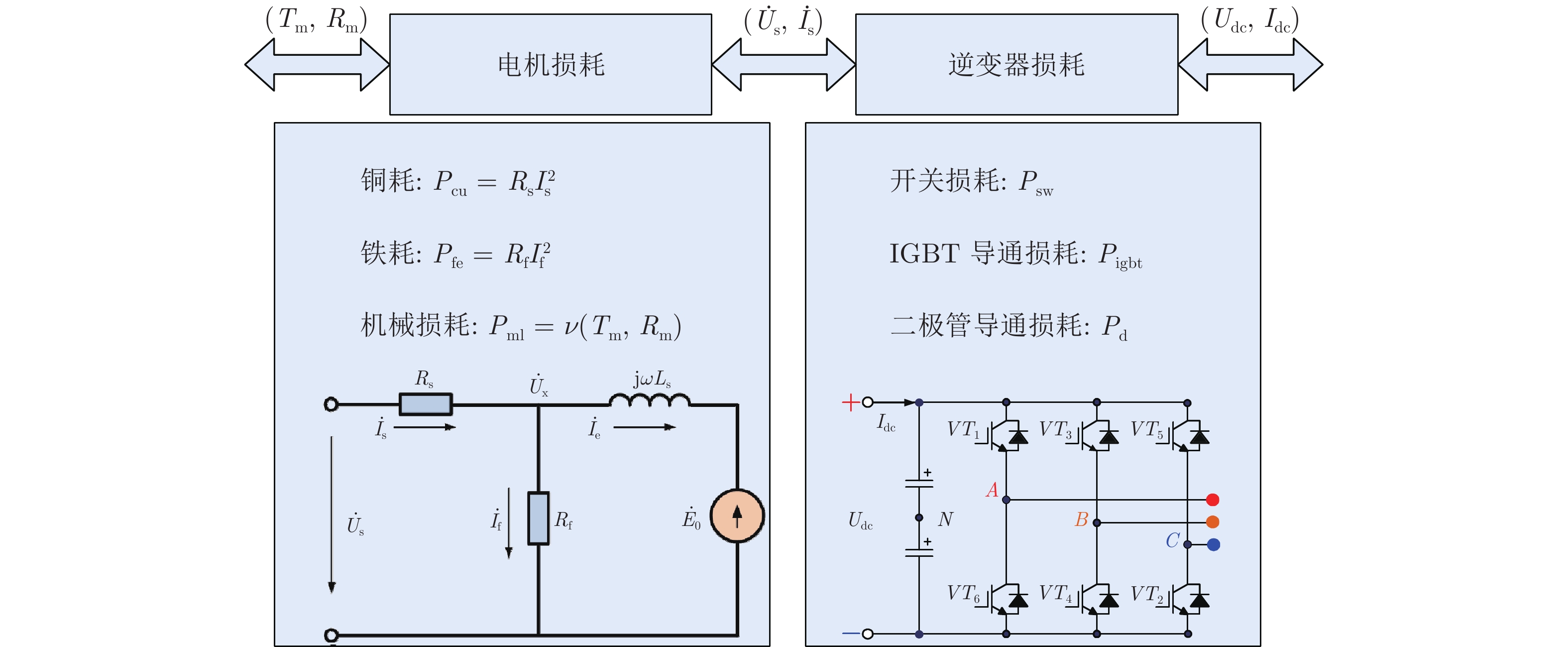
图 11 直流电能至电机输出转矩环节的能量转换过程示意图
Fig. 11 Schematic diagram of the energy conversion process from direct current electric energy to motor output torque

图 12 永磁同步电机电流矢量优化控制示意图
Fig. 12 Schematic diagram of current vector optimization control of PMSM
表 1 车速优化决策方法优缺点总结
Table 1 Summary of advantages and disadvantages of vehicle speed optimal decision-making methods
方法 优点 缺点 变分法 有解析解、计算开销较小 只能应用于控制变量连续且不受限制,
而且状态变量连续可微的场景Pontryagin极小值原理 可用于控制变量分段连续且受限情况 仅提供了最优性的必要条件 二次规划 收敛速度快, 求解效率高 目标函数必须是二次型函数, 并且约束条件是变量的线性不等式 动态规划 可求解不连续及有约束OPC问题, 适用性广泛 无法对连续空间进行精确表示和求解, 存在“维数灾难” MPC 可有效地克服过程的不确定性、非线性, 鲁棒性强 求解精度取决于预测模型精度, 过于复杂的模型会降低运算速度 自适应神经模糊控制 兼具自适应性和逻辑推理能力 需要大量的数据样本对模糊神经网络进行离线训练 强化学习 与人类的学习过程类似, 可根据奖励机制实现
不确定场景下的自主行为优化决策奖励函数的设置需考虑多重因素, 价值网络和策略网络
的训练过程需要多场景下的海量样本支撑 下载: 导出CSV
下载: 导出CSV
表 2 三类离线MTPA方法的优缺点
Table 2 Advantages and disadvantages of three types of off-line MTPA methods
方法 优点 缺点 解析法 原理简单, 易于实现 控制精度易受电机参数变化影响 简化MTPA 控制复杂度低 控制精度随着简化而降低 查表法 避免了复杂运算, 降低了硬件负担 需要提前做大量实验以建立控制表格, 普适性差
下载: 导出CSV
表 3 三类ME方法的优缺点
Table 3 Advantages and disadvantages of the three types of ME methods
方法 优点 缺点 基于模型的方法 考虑了铜耗和铁耗, 理论上可以实现最大效率控制 对电机参数十分敏感, 参数变化后将影响控制效果 基于搜索的方法 不受电机参数变化影响, 鲁棒性强 收敛速度较慢, 容易导致转矩、转速脉动, 甚至引起系统振荡 混合方法
理论上可实现全局最优, 并且可根据电机参数的变化动态调整 计算复杂度较高, 在实际电机控制中难以实现运行
下载: 导出CSV
-
[1] 国务院办公厅. 新能源汽车产业发展规划(2021−2035年) [Online]: https://wap.miit.gov.cn/jgsj/ghs/zlygh/art/2022/art_158cc63ebe76470cbff2458c4328ea22.html, 2020-10-20General Office of the State Council. New energy vehicle industry development plan (2021−2035) [Online], available: https://wap.miit.gov.cn/jgsj/ghs/zlygh/art/2022/art_158cc63ebe76470cbff2458c4328ea22.html, October 20, 2020 [2] 欧阳明高. 中国新能源汽车技术路线的回顾与展望. 见: 中国电动汽车百人会论坛. 北京, 中国: 2019.Ouyang Ming-Gao. Review and outlook of Chinese NEV technology pathway. In: Proceedings of China EV100 Forum. Beijing, China: 2019. [3] 中国汽车工程学会. 节能与新能源汽车技术路线图2.0. 北京: 机械工业出版社, 2021.China Society of Automotive Engineer. Technology Roadmap for Energy Saving and New Energy Vehicles 2.0. Beijing: China Machine Press, 2021. [4] 国家市场监督管理总局, 国家标准化管理委员会. 电动汽车能量消耗率限值, GB/T 36980-2018, 2018.State Administration for Market Regulation, Standardization Administration of the People's Republic of China. Energy Consumption Limits for Electric Vehicles, GB/T 36980-2018, 2018. [5] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 电动汽车−能量消耗率和续驶里程−试验方法, GB/T 18386-2017, 2017.General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration of the People's Republic of China. Electric Vehicles-Energy Consumption and Range-Test Procedures, GB/T 18386-2017, 2017. [6] Campanari S, Manzolini G, De la Iglesia F G. Energy analysis of electric vehicles using batteries or fuel cells through well-to-wheel driving cycle simulations. Journal of Power Sources, 2009, 186(2): 464-477 doi: 10.1016/j.jpowsour.2008.09.115 [7] 卢东斌, 欧阳明高, 谷靖, 李建秋. 电动汽车永磁同步电机最优制动能量回馈控制. 中国电机工程学报, 2013, 33(3): 83-91Lu Dong-Bin, Ouyang Ming-Gao, Gu Jing, Li Jian-Qiu. Optimal regenerative braking control for permanent magnet synchronous motors in electric vehicles. Proceedings of the CSEE, 2013, 33(3): 83-91 [8] 王耀南, 孟步敏, 申永鹏, 魏跃远, 尹颖, 易迪华, 等. 燃油增程式电动汽车动力系统关键技术综述. 中国电机工程学报, 2014, 34(27): 4629-4639Wang Yao-Nan, Meng Bu-Min, Shen Yong-Peng, Wei Yue-Yuan, Yin Ying, Yi Di-Hua, et al. Researches on power systems of extended range electric vehicles. Proceedings of the CSEE, 2014, 34(27): 4629-4639 [9] Gantt L R. Energy Losses for Propelling and Braking Conditions of an Electric Vehicle [Master thesis], Virginia Tech, USA, 2011. [10] Björnsson L H, Karlsson S. The potential for brake energy regeneration under Swedish conditions. Applied Energy, 2016, 168: 75-84 doi: 10.1016/j.apenergy.2016.01.051 [11] 陈虹, 郭露露, 宫洵, 高炳钊, 张琳. 智能时代的汽车控制. 自动化学报, 2020, 46(7): 1313-1332Chen Hong, Guo Lu-Lu, Gong Xun, Gao Bing-Zhao, Zhang Lin. Automotive control in intelligent era. Acta Automatica Sinica, 2020, 46(7): 1313-1332 [12] NEXTCAR. Next-generation energy technologies for connected and automated on-road vehicles [Online], available: https://arpa-e.energy.gov/technologies/programs/nextcar, November 2, 2016 [13] 洪金龙, 高炳钊, 董世营, 程一帆, 王玉海, 陈虹. 智能网联汽车节能优化关键问题与研究进展. 中国公路学报, 2021, 34(11): 306-334Hong Jin-Long, Gao Bing-Zhao, Dong Shi-Ying, Cheng Yi-Fan, Wang Yu-Hai, Chen Hong. Key problems and research progress of energy saving optimization for intelligent connected vehicles. China Journal of Highway and Transport, 2021, 34(11): 306-334 [14] Vahidi A, Sciarretta A. Energy saving potentials of connected and automated vehicles. Transportation Research Part C: Emerging Technologies, 2018, 95: 822-843 doi: 10.1016/j.trc.2018.09.001 [15] 郭露露, 高炳钊, 陈虹. 汽车经济性行驶优化. 中国科学: 信息科学, 2016, 46(5): 560-570 doi: 10.1360/N112015-00290Guo Lu-Lu, Gao Bing-Zhao, Chen Hong. Optimal ecodriving control of vehicles. Scientia Sinica Informationis, 2016, 46(5): 560-570 doi: 10.1360/N112015-00290 [16] Huang G M, Yuan X F, Shi K, Liu Z X, Wu X R. A 3-D multi-object path planning method for electric vehicle considering the energy consumption and distance. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7508-7520 doi: 10.1109/TITS.2021.3071319 [17] Ozatay E, Onori S, Wollaeger J, Ozguner U, Rizzoni G, Filev D, et al. Cloud-based velocity profile optimization for everyday driving: A dynamic-programming-based solution. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(6): 2491-2505 doi: 10.1109/TITS.2014.2319812 [18] Pei J Z, Su Y X, Zhang D H, Qi Y, Leng Z W. Velocity forecasts using a combined deep learning model in hybrid electric vehicles with V2V and V2I communication. Science China Technological Sciences, 2020, 63(1): 55-64 doi: 10.1007/s11431-018-9396-0 [19] He H W, Wang Y L, Han R Y, Han M, Bai Y F, Liu Q W. An improved MPC-based energy management strategy for hybrid vehicles using V2V and V2I communications. Energy, 2021, 225: Article No. 120273 doi: 10.1016/j.energy.2021.120273 [20] Kim D, Eo J S, Kim K K K. Service-oriented real-time energy-optimal regenerative braking strategy for connected and autonomous electrified vehicles. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 11098-11115 doi: 10.1109/TITS.2021.3099812 [21] Xiong H Y, Tan Z R, Zhang R H, He S. A new dual axle drive optimization control strategy for electric vehicles using vehicle-to-infrastructure communications. IEEE Transactions on Industrial Informatics, 2020, 16(4): 2574-2582 doi: 10.1109/TII.2019.2944850 [22] Zhang B, Xu F G, Shen T L. MPC based energy management strategy with on-board parameter identification. In: Proceedings of the 13th Asian Control Conference (ASCC). Jeju, South Korea: IEEE, 2022. 357−362 [23] Liu R, Liu H, Han L J, He P, Zhang Y B. A multi-objective regenerative braking control strategy combining with velocity optimization for connected vehicles. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 237(6): 1465-1474 doi: 10.1177/09544070221085960 [24] Du A M, Han Y Y, Zhu Z P. Review on multi-objective optimization of energy management strategy for hybrid electric vehicle integrated with traffic information. Energy Sources, Part A: Recovery, Utilization, and Environmental Effects, 2022, 44(3): 7914-7933 doi: 10.1080/15567036.2022.2117437 [25] Oncken J, Chen B. Real-time model predictive powertrain control for a connected plug-in hybrid electric vehicle. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8420-8432 doi: 10.1109/TVT.2020.3000471 [26] Padilla G P, Weiland S, Donkers M C F. A global optimal solution to the eco-driving problem. IEEE Control Systems Letters, 2018, 2(4): 599-604 doi: 10.1109/LCSYS.2018.2846182 [27] 董昊轩, 殷国栋, 庄伟超, 陈浩, 周毅晨, 汪䶮. 基于迭代动态规划的网联电动汽车经济性巡航车速优化. 机械工程学报, 2021, 57(6): 121-130 doi: 10.3901/JME.2021.06.121Dong Hao-Xuan, Yin Guo-Dong, Zhuang Wei-Chao, Chen Hao, Zhou Yi-Chen, Wang Yan. Economic cruising velocity optimization using iterative dynamic programming of connected electric vehicle. Journal of Mechanical Engineering, 2021, 57(6): 121-130 doi: 10.3901/JME.2021.06.121 [28] Sciarretta A, De Nunzio G, Ojeda L L. Optimal ecodriving control: Energy-efficient driving of road vehicles as an optimal control problem. IEEE Control Systems Magazine, 2015, 35(5): 71-90 doi: 10.1109/MCS.2015.2449688 [29] 付锐, 张雅丽, 袁伟. 生态驾驶研究现状及展望. 中国公路学报, 2019, 32(3): 1-12Fu Rui, Zhang Ya-Li, Yuan Wei. Progress and prospect in research on eco-driving. China Journal of Highway and Transport, 2019, 32(3): 1-12 [30] 庄伟超, 丁昊楠, 董昊轩, 殷国栋, 王茜, 周朝宾, 等. 信号交叉口网联电动汽车自适应学习生态驾驶策略. 吉林大学学报(工学版), 2023, 53(1): 82-93Zhuang Wei-Chao, Ding Hao-Nan, Dong Hao-Xuan, Yin Guo-Dong, Wang Xi, Zhou Chao-Bin, et al. Learning based eco-driving strategy of connected electric vehicle at signalized intersection. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(1): 82-93 [31] Guo L, Chu H, Ye J, Gao B, Chen H. Hierarchical velocity control considering traffic signal timings for connected vehicles. IEEE Transactions on Intelligent Vehicles, 2022, 8(2): 1403-1414 [32] Nie Z F, Farzaneh H. Real-time dynamic predictive cruise control for enhancing eco-driving of electric vehicles, considering traffic constraints and signal phase and timing (SPaT) information, using artificial-neural-network-based energy consumption model. Energy, 2022, 241: Article No. 122888 doi: 10.1016/j.energy.2021.122888 [33] Fleming J, Yan X D, Allison C, Stanton N, Lot R. Real-time predictive eco-driving assistance considering road geometry and long-range radar measurements. IET Intelligent Transport Systems, 2021, 15(4): 573-583 doi: 10.1049/itr2.12047 [34] Jia Y Z, Jibrin R, Gorges D. Energy-optimal adaptive cruise control for electric vehicles based on linear and nonlinear model predictive control. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14173-14187 doi: 10.1109/TVT.2020.3044265 [35] Lin Y C, Nguyen H L T. Adaptive neuro-fuzzy predictor-based control for cooperative adaptive cruise control system. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(3): 1054-1063 doi: 10.1109/TITS.2019.2901498 [36] 赵秀春, 郭戈. 混合动力电动汽车的跟车控制与能量管理. 自动化学报, 2022, 48(1): 162-170Zhao Xiu-Chun, Guo Ge. Tracking control and energy management of hybrid electric vehicles. Acta Automatica Sinica, 2022, 48(1): 162-170 [37] Zhang S W, Luo Y G, Li K Q, Li V. Real-time energy-efficient control for fully electric vehicles based on an explicit model predictive control method. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4693-4701 doi: 10.1109/TVT.2018.2806400 [38] Ding F, Jin H. On the optimal speed profile for eco-driving on curved roads. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(12): 4000-4010 doi: 10.1109/TITS.2018.2795602 [39] Zhu W X. Motion energy dissipation in traffic flow on a curved road. International Journal of Modern Physics C, 2013, 24(7): Article No. 1350046 doi: 10.1142/S0129183113500460 [40] Kamal M A S, Mukai M, Murata J, Kawabe T. Ecological vehicle control on roads with up-down slopes. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3): 783-794 doi: 10.1109/TITS.2011.2112648 [41] Mihály A, Gaspar P. Look-ahead cruise control considering road geometry and traffc flow. In: Proceedings of the 14th IEEE International Symposium on Computational Intelligence and Informatics (CINTI). Budapest, Hungary: IEEE, 2013. 189−194 [42] Dong H X, Zhuang W C, Chen B L, Yin G D, Wang Y. Enhanced eco-approach control of connected electric vehicles at signalized intersection with queue discharge prediction. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5457-5469 doi: 10.1109/TVT.2021.3075480 [43] Yang H, Almutairi F, Rakha H. Eco-driving at signalized intersections: A multiple signal optimization approach. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(5): 2943-2955 doi: 10.1109/TITS.2020.2978184 [44] Yang H, Rakha H, Ala M V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1575-1585 [45] Dong H X, Zhuang W C, Yin G D, Chen H, Wang Y. Energy-optimal velocity planning for connected electric vehicles at signalized intersection with queue prediction. In: Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Boston, USA: IEEE, 2020. 238−243 [46] 胡林, 周登辉, 黄晶, 杜荣华, 张新. 考虑信号灯和能耗的电动车最优路径规划. 汽车工程, 2021, 43(5): 641-649, 666Hu Lin, Zhou Deng-Hui, Huang Jing, Du Rong-Hua, Zhang Xin. Optimal path planning for electric vehicle with consideration of traffic light and energy consumption. Automotive Engineering, 2021, 43(5): 641-649, 666 [47] Xu H L, Zhang Y, Li L, Li W X. Cooperative driving at unsignalized intersections using tree search. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(11): 4563-4571 doi: 10.1109/TITS.2019.2940641 [48] Pan X, Chen B L, Timotheou S, Evangelou S A. A convex optimal control framework for autonomous vehicle intersection crossing. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 163-177 doi: 10.1109/TITS.2022.3211272 [49] 钱立军, 陈晨, 陈健, 陈欣宇, 熊驰. 基于Q学习模型的无信号交叉口离散车队控制. 汽车工程, 2022, 44(9): 1350-1358, 1385 doi: 10.19562/j.chinasae.qcgc.2022.09.006Qian Li-Jun, Chen Chen, Chen Jian, Chen Xin-Yu, Xiong Chi. Discrete platoon control at an unsignalized intersection based on Q-learning model. Automotive Engineering, 2022, 44(9): 1350-1358, 1385 doi: 10.19562/j.chinasae.qcgc.2022.09.006 [50] Deng Z Y, Yang K D, Shen W M, Shi Y J. Cooperative platoon formation of connected and autonomous vehicles: Toward efficient merging coordination at unsignalized intersections. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(5): 5625-5639 doi: 10.1109/TITS.2023.3235774 [51] Chen C, Wu B, Xuan L, Chen J, Qian L J. A discrete control method for the unsignalized intersection based on cooperative grouping. IEEE Transactions on Vehicular Technology, 2022, 71(1): 123-136 doi: 10.1109/TVT.2021.3128390 [52] Wu J, Wang X Y, Li L, Qin C, Du Y C. Hierarchical control strategy with battery aging consideration for hybrid electric vehicle regenerative braking control. Energy, 2018, 145: 301-312 doi: 10.1016/j.energy.2017.12.138 [53] Heydari S, Fajri P, Rasheduzzaman M, Sabzehgar R. Maximizing regenerative braking energy recovery of electric vehicles through dynamic low-speed cutoff point detection. IEEE Transactions on Transportation Electrification, 2019, 5(1): 262-270 doi: 10.1109/TTE.2019.2894942 [54] Dong H X, Zhuang W C, Yin G D, Xu L W, Wang Y, Wang F, et al. Energy-optimal braking control using a double-layer scheme for trajectory planning and tracking of connected electric vehicles. Chinese Journal of Mechanical Engineering, 2021, 34(1): Article No. 83 doi: 10.1186/s10033-021-00601-3 [55] Kim D, Eo J S, Kim K K K. Parameterized energy-optimal regenerative braking strategy for connected and autonomous electrified vehicles: A real-time dynamic programming approach. IEEE Access, 2021, 9: 103167-103183 doi: 10.1109/ACCESS.2021.3098807 [56] Dong H X, Zhuang W C, Wang Y, Ding H N, Yin G D. Energy-optimal braking velocity planning of connected electric vehicle. In: Proceedings of the 4th CAA International Conference on Vehicular Control and Intelligence (CVCI). Hangzhou, China: IEEE, 2020. 25−29 [57] Zhang X Z, Wang Y N, Liu G R, Yuan X F. Robust regenerative charging control based on T-S fuzzy sliding-mode approach for advanced electric vehicle. IEEE Transactions on Transportation Electrification, 2016, 2(1): 52-65 doi: 10.1109/TTE.2016.2535411 [58] 郭景华, 王班, 王靖瑶, 罗禹贡, 李克强. 智能网联混合动力汽车队列模型预测分层控制. 汽车工程, 2020, 42(10): 1293-1301, 1334Guo Jing-Hua, Wang Ban, Wang Jing-Yao, Luo Yu-Gong, Li Ke-Qiang. Hierarchical model predictive control of intelligent and connected hybrid electric vehicles platooning. Automotive Engineering, 2020, 42(10): 1293-1301, 1334 [59] Naeem H M Y, Bhatti A I, Butt Y A, Ahmed Q. Eco-driving control of electric vehicle with battery dynamic model and multiple traffic signals. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(6): 1133-1143 doi: 10.1177/09544070211037468 [60] Zhang Y, Zhang Y J, Ai Z Y, Murphey Y L, Zhang J. Energy optimal control of motor drive system for extending ranges of electric vehicles. IEEE Transactions on Industrial Electronics, 2021, 68(2): 1728-1738 doi: 10.1109/TIE.2019.2947841 [61] Zhang J, Jin H. Optimized calculation of the economic speed profile for slope driving: Based on iterative dynamic programming. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(4): 3313-3323 [62] Han J H, Sciarretta A, Ojeda L L, De Nunzio G, Thibault L. Safe-and eco-driving control for connected and automated electric vehicles using analytical state-constrained optimal solution. IEEE Transactions on Intelligent Vehicles, 2018, 3(2): 163-172 doi: 10.1109/TIV.2018.2804162 [63] 唐小林, 李珊珊, 王红, 段紫文, 李以农, 郑玲. 网联环境下基于分层式模型预测控制的车队能量控制策略研究. 机械工程学报, 2020, 56(14): 119-128 doi: 10.3901/JME.2020.14.119Tang Xiao-Lin, Li Shan-Shan, Wang Hong, Duan Zi-Wen, Li Yi-Nong, Zheng Ling. Research on energy control strategy based on hierarchical model predictive control in connected environment. Journal of Mechanical Engineering, 2020, 56(14): 119-128 doi: 10.3901/JME.2020.14.119 [64] Saerens B. Optimal Control Based Eco-driving: Theoretical Approach and Practical Applications [Ph.D. dissertation], Katholieke Universiteit Leuven, Belgium, 2012. [65] Singh K V, Bansal H O, Singh D. Development of an adaptive neuro-fuzzy inference system based equivalent consumption minimisation strategy to improve fuel economy in hybrid electric vehicles. IET Electrical Systems in Transportation, 2021, 11(3): 171-185 doi: 10.1049/els2.12020 [66] Moghaddam I T Z, Ayati M, Taghavipour A, Marzbanrad J. Modeling and prediction of driver-vehicle-unit velocity using adaptive neuro-fuzzy inference system in real traffic flow. Journal of Mechanical Engineering, 2019, 16(3): 105-122 doi: 10.24191/jmeche.v16i3.15351 [67] Ge G X, Wang T, Lv Y H, Zou X J, Song W, Zhang G F. Energy-efficient braking torque distribution strategy of rear-axle drive commercial EV based on fuzzy neural network. SAE International Journal of Advances and Current Practices in Mobility, 2021, 3(4): 2136-2145 doi: 10.4271/2021-01-0783 [68] Lee H, Kim N, Cha S W. Model-based reinforcement learning for eco-driving control of electric vehicles. IEEE Access, 2020, 8: 202886-202896 doi: 10.1109/ACCESS.2020.3036719 [69] 唐小林, 陈佳信, 刘腾, 李佳承, 胡晓松. 基于深度强化学习的混合动力汽车智能跟车控制与能量管理策略研究. 机械工程学报, 2021, 57(22): 237-246 doi: 10.3901/JME.2021.22.237Tang Xiao-Lin, Chen Jia-Xin, Liu Teng, Li Jia-Cheng, Hu Xiao-Song. Research on deep reinforcement learning-based intelligent car-following control and energy management strategy for hybrid electric vehicles. Journal of Mechanical Engineering, 2021, 57(22): 237-246 doi: 10.3901/JME.2021.22.237 [70] 唐小林, 陈佳信, 高博麟, 杨凯, 胡晓松, 李克强. 基于云控系统高精度地图驱动的深度强化学习型混合动力汽车集成控制. 机械工程学报, 2022, 58(24): 163-177 doi: 10.3901/JME.2022.24.163Tang Xiao-Lin, Chen Jia-Xin, Gao Bo-Lin, Yang Kai, Hu Xiao-Song, Li Ke-Qiang. Deep reinforcement learning-based integrated control of hybrid electric vehicles driven by high definition map in cloud control system. Journal of Mechanical Engineering, 2022, 58(24): 163-177 doi: 10.3901/JME.2022.24.163 [71] Liu T, Lei L, Zheng K, Zhang K. Autonomous platoon control with integrated deep reinforcement learning and dynamic programming. IEEE Internet of Things Journal, 2023, 10(6): 5476-5489 doi: 10.1109/JIOT.2022.3222128 [72] Lei L, Liu T, Zheng K, Hanzo L. Deep reinforcement learning aided platoon control relying on V2X information. IEEE Transactions on Vehicular Technology, 2022, 71(6): 5811-5826 doi: 10.1109/TVT.2022.3161585 [73] Busoniu L, Babuska R, De Schutter B, Ernst D [著], 刘全, 傅启明, 章宗长[译]. 基于函数逼近的强化学习与动态规划. 北京: 人民邮电出版社, 2019.Busoniu L, Babuska R, De Schutter B, Ernst D [Author], Liu Quan, Fu Qi-ming, Zhang Zong-Chang [Translator]. Reinforcement Learning and Dynamic Programming Using Function Approximators. Beijing: Posts and Telecom Press, 2019. [74] 张杰, 王飞跃. 最优控制—数学理论与智能方法(上册). 北京: 清华大学出版社, 2017.Zhang Jie, Wang Fei-Yue. Optimal Control—Mathematical Theory and Intelligent Methods (Volume 1). Beijing: Tsinghua University Press, 2017. [75] Bertsekas D P. 强化学习与最优控制. 北京: 清华大学出版社, 2020.Bertsekas D P. Reinforcement Learning and Optimal Control. Beijing: Tsinghua University Press, 2020. [76] Al-Tamimi A, Lewis F L, Abu-Khalaf M. Discrete-time nonlinear HJB solution using approximate dynamic programming: Convergence proof. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2008, 38(4): 943-949 doi: 10.1109/TSMCB.2008.926614 [77] Liu D R, Wei Q L. Policy iteration adaptive dynamic programming algorithm for discrete-time nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(3): 621-634 doi: 10.1109/TNNLS.2013.2281663 [78] Zhao D B, Hu Z H, Xia Z P, Alippi C, Zhu Y H, Wang D. Full-range adaptive cruise control based on supervised adaptive dynamic programming. Neurocomputing, 2014, 125: 57-67 doi: 10.1016/j.neucom.2012.09.034 [79] 金辉, 张子豪. 基于自适应动态规划的HEV能量管理研究综述. 汽车工程, 2020, 42(11): 1490-1496Jin Hui, Zhang Zi-Hao. Review of research on HEV energy management based on adaptive dynamic programming. Automotive Engineering, 2020, 42(11): 1490-1496 [80] Li G Q, Gorges D. Ecological adaptive cruise control and energy management strategy for hybrid electric vehicles based on heuristic dynamic programming. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(9): 3526-3535 doi: 10.1109/TITS.2018.2877389 [81] Li G Q, Gorges D, Wang M. Online optimization of gear shift and velocity for eco-driving using adaptive dynamic programming. IEEE Transactions on Intelligent Vehicles, 2022, 7(1): 123-132 doi: 10.1109/TIV.2021.3111037 [82] Li G Q, Gorges D. Fuel-efficient gear shift and power split strategy for parallel HEVs based on heuristic dynamic programming and neural networks. IEEE Transactions on Vehicular Technology, 2019, 68(10): 9519-9528 doi: 10.1109/TVT.2019.2927751 [83] 龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制. 第2版. 北京: 北京理工大学出版社, 2020.Gong Jian-Wei, Liu Kai, Qi Jian-Yong. Model Predictive Control for Self-driving Vehicles (Second edition). Beijing: Beijing Institute of Technology Press, 2020. [84] 席裕庚, 李德伟, 林姝. 模型预测控制——现状与挑战. 自动化学报, 2013, 39(3): 222-236 doi: 10.1016/S1874-1029(13)60024-5Xi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control — status and challenges. Acta Automatica Sinica, 2013, 39(3): 222-236 doi: 10.1016/S1874-1029(13)60024-5 [85] 马乐乐, 刘向杰, 高福荣. 迭代学习模型预测控制研究现状与挑战. 自动化学报, 2022, 48(6): 1385-1401Ma Le-Le, Liu Xiang-Jie, Gao Fu-Rong. Status and challenges of iterative learning model predictive control. Acta Automatica Sinica, 2022, 48(6): 1385-1401 [86] Guo H Q, Liu C Z, Yong J W, Cheng X Q, Muhammad F. Model predictive iterative learning control for energy management of plug-in hybrid electric vehicle. IEEE Access, 2019, 7: 71323-71334 doi: 10.1109/ACCESS.2019.2919684 [87] Wang F Y, Zheng N N, Cao D P, Martinez C M, Li L, Liu T. Parallel driving in CPSS: A unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 577-587 doi: 10.1109/JAS.2017.7510598 [88] Jang J S R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Transactions on Systems, Man, and Cybernetics, 1993, 23(3): 665-685 doi: 10.1109/21.256541 [89] 潘峰, 鲍泓. 强化学习的自动驾驶控制技术研究进展. 中国图象图形学报, 2021, 26(1): 28-35Pan Feng, Bao Hong. Research progress of automatic driving control technology based on reinforcement learning. Journal of Image and Graphics, 2021, 26(1): 28-35 [90] 余伶俐, 邵玄雅, 龙子威, 魏亚东, 周开军. 智能车辆深度强化学习的模型迁移轨迹规划方法. 控制理论与应用, 2019, 36(9): 1409-1422Yu Ling-Li, Shao Xuan-Ya, Long Zi-Wei, Wei Ya-Dong, Zhou Kai-Jun. Intelligent land vehicle model transfer trajectory planning method of deep reinforcement learning. Control Theory & Applications, 2019, 36(9): 1409-1422 [91] Ehsani M, Gao Y M, Emadi A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design (Second edition). Boca Raton: CRC Press, 2010. [92] Colli V, Tomassi G, Scarano M. "Single Wheel" longitudinal traction control for electric vehicles. IEEE Transactions on Power Electronics, 2006, 21(3): 799-808 doi: 10.1109/TPEL.2006.872363 [93] Xu G Q, Xu K, Zheng C H, Zahid T. Optimal operation point detection based on force transmitting behavior for wheel slip prevention of electric vehicles. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 481-490 doi: 10.1109/TITS.2015.2480116 [94] He Z J, Shi Q, Wei Y J, Zheng J X, Gao B Z, He L. A torque demand model predictive control approach for driving energy optimization of battery electric vehicle. IEEE Transactions on Vehicular Technology, 2021, 70(4): 3232-3242 doi: 10.1109/TVT.2021.3066405 [95] Dogan D, Boyraz P. Smart traction control systems for electric vehicles using acoustic road-type estimation. IEEE Transactions on Intelligent Vehicles, 2019, 4(3): 486-496 doi: 10.1109/TIV.2019.2919461 [96] Aligia D A, Magallan G A, De Angelo C H. EV traction control based on nonlinear observers considering longitudinal and lateral tire forces. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2558-2571 doi: 10.1109/TITS.2017.2758343 [97] Mi C, Lin H, Zhang Y. Iterative learning control of antilock braking of electric and hybrid vehicles. IEEE Transactions on Vehicular Technology, 2005, 54(2): 486-494 doi: 10.1109/TVT.2004.841552 [98] He Z J, Shi Q, Wei Y J, Gao B Z, Zhu B, He L. A model predictive control approach with slip ratio estimation for electric motor antilock braking of battery electric vehicle. IEEE Transactions on Industrial Electronics, 2022, 69(9): 9225-9234 doi: 10.1109/TIE.2021.3112966 [99] Satzger C, de Castro R. Predictive brake control for electric vehicles. IEEE Transactions on Vehicular Technology, 2018, 67(2): 977-990 doi: 10.1109/TVT.2017.2751104 [100] Yin G D, Jin X J. Cooperative control of regenerative braking and antilock braking for a hybrid electric vehicle. Mathematical Problems in Engineering, 2013, 2013: Article No. 890427 [101] Subramaniyam K V, Subramanian S C. Electrified vehicle wheel slip control using responsiveness of regenerative braking. IEEE Transactions on Vehicular Technology, 2021, 70(4): 3208-3217 doi: 10.1109/TVT.2021.3066095 [102] Guo J H, Li W C, Wang J Y, Luo Y G, Li K Q. Safe and energy-efficient car-following control strategy for intelligent electric vehicles considering regenerative braking. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7070-7081 doi: 10.1109/TITS.2021.3066611 [103] Wang J C, He R, Kim Y B. Optimal anti-lock braking control with nonlinear variable voltage charging scheme for an electric vehicle. IEEE Transactions on Vehicular Technology, 2020, 69(7): 7211-7222 doi: 10.1109/TVT.2020.2992756 [104] Choo K M, Won C Y. Design and analysis of electrical braking torque limit trajectory for regenerative braking in electric vehicles with PMSM drive systems. IEEE Transactions on Power Electronics, 2020, 35(12): 13308-13321 doi: 10.1109/TPEL.2020.2994615 [105] 李克强, 罗禹贡, 陈慧. 先进电动汽车状态估计与辨识. 北京: 机械工业出版社, 2019.Li Ke-Qiang, Luo Yu-Gong, Chen Hui. State Estimation and Identification of Advanced Electric Vehicles. Beijing: China Machine Press, 2019. [106] Van der Sluis F, Romers L, Van Spijk G, Hupkes I. CVT, Promising Solutions for Electrification, SAE Technical Paper 2019-01-0359, 2019. [107] Ruan J G, Walker P, Zhang N. Comparison of power consumption efficiency of CVT and multi-speed transmissions for electric vehicle. International Journal of Automotive Engineering, 2018, 9(4): 268-275 doi: 10.20485/jsaeijae.9.4_268 [108] Tian Y, Zhang N, Zhou S L, Walker P D. Model and gear shifting control of a novel two-speed transmission for battery electric vehicles. Mechanism and Machine Theory, 2020, 152: Article No. 103902 doi: 10.1016/j.mechmachtheory.2020.103902 [109] Nguyen C T, Walker P D, Zhou S L, Zhang N. Optimal sizing and energy management of an electric vehicle powertrain equipped with two motors and multi-gear ratios. Mechanism and Machine Theory, 2022, 167: Article No. 104513 doi: 10.1016/j.mechmachtheory.2021.104513 [110] Ahssan M R, Ektesabi M, Gorji S. Gear ratio optimization along with a novel gearshift scheduling strategy for a two-speed transmission system in electric vehicle. Energies, 2020, 13(19): Article No. 5073 doi: 10.3390/en13195073 [111] 余卓平, 熊璐, 陈辛波, 冷搏. 分布式电驱动汽车及其动力学控制. 上海: 同济大学出版社, 2021.Yu Zhuo-Ping, Xiong Lu, Chen Xin-Bo, Leng Bo. Distributed Electric Vehicle and Its Dynamics Control. Shanghai: Tongji University Press, 2021. [112] Li Y, Wu D M, Du C, Yang H P, Li Y, Yang X B, et al. Velocity Trajectory Planning for Energy Savings of an Intelligent 4WD Electric Vehicle Using Model Predictive Control, SAE Technical Paper 2018−01−1584, 2018. [113] Lee H S, Hwang M H, Cha H R. Development of an optimal power-distribution-management algorithm for four-wheel-drive electric vehicles. IEEE Access, 2021, 9: 99731-99741 doi: 10.1109/ACCESS.2021.3095371 [114] Morera-Torres E, Ocampo-Martinez C, Bianchi F D. Experimental modelling and optimal torque vectoring control for 4WD vehicles. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4922-4932 doi: 10.1109/TVT.2022.3158091 [115] Parra A, Tavernini D, Gruber P, Sorniotti A, Zubizarreta A, Perez J. On nonlinear model predictive control for energy-efficient torque-vectoring. IEEE Transactions on Vehicular Technology, 2021, 70(1): 173-188 doi: 10.1109/TVT.2020.3022022 [116] Sun H Z, Wang H, Zhao X C. Line braking torque allocation scheme for minimal braking loss of four-wheel-drive electric vehicles. IEEE Transactions on Vehicular Technology, 2019, 68(1): 180-192 doi: 10.1109/TVT.2018.2880801 [117] Xiao R X, Yang X, Li J, Jia X G. Loss minimization control for interior permanent magnet synchronous motor in a wide speed range. In: Proceedings of the 4th IEEE International Electrical and Energy Conference (CIEEC). Wuhan, China: IEEE, 2021. 1−6 [118] Najjar-Khodabakhsh A, Soltani J. MTPA control of mechanical sensorless IPMSM based on adaptive nonlinear control. ISA transactions, 2016, 61: 348-356 doi: 10.1016/j.isatra.2016.01.004 [119] Li K, Wang Y. Maximum torque per ampere (MTPA) control for IPMSM drives based on a variable-equivalent-parameter MTPA control law. IEEE Transactions on Power Electronics, 2019, 34(7): 7092-7102 doi: 10.1109/TPEL.2018.2877740 [120] Lin F J, Liu Y T, Yu W A. Power perturbation based MTPA with an online tuning speed controller for an IPMSM drive system. IEEE Transactions on Industrial Electronics, 2018, 65(5): 3677-3687 doi: 10.1109/TIE.2017.2762634 [121] Feng G D, Lai C Y, Mukherjee K, Kar N C. Current injection-based online parameter and VSI nonlinearity estimation for PMSM drives using current and voltage DC components. IEEE Transactions on Transportation Electrification, 2016, 2(2): 119-128 doi: 10.1109/TTE.2016.2538180 [122] Feng G D, Lai C Y, Han Y, Kai N C. Fast maximum torque per ampere (MTPA) angle detection for interior PMSMs using online polynomial curve fitting. IEEE Transactions on Power Electronics, 2022, 37(2): 2045-2056 [123] Bedetti N, Calligaro S, Olsen C, Petrella R. Automatic MTPA tracking in IPMSM drives: Loop dynamics, design, and auto-tuning. IEEE Transactions on Industry Applications, 2017, 53(5): 4547-4558 doi: 10.1109/TIA.2017.2708683 [124] Sun T F, Wang J B, Chen X. Maximum torque per ampere (MTPA) control for interior permanent magnet synchronous machine drives based on virtual signal injection. IEEE Transactions on Power Electronics, 2015, 30(9): 5036-5045 doi: 10.1109/TPEL.2014.2365814 [125] Sun T F, Wang J B, Koc M, Chen X. Self-learning MTPA control of interior permanent-magnet synchronous machine drives based on virtual signal injection. IEEE Transactions on Industry Applications, 2016, 52(4): 3062-3070 doi: 10.1109/TIA.2016.2533601 [126] Pan C T, Sue S M. A linear maximum torque per ampere control for IPMSM drives over full-speed range. IEEE Transactions on Energy Conversion, 2005, 20(2): 359-366 doi: 10.1109/TEC.2004.841517 [127] Ahmed A, Sozer Y, Hamdan M. Maximum torque per ampere control for buried magnet PMSM based on DC-link power measurement. IEEE Transactions on Power Electronics, 2017, 32(2): 1299-1311 doi: 10.1109/TPEL.2016.2543663 [128] Windisch T, Hofmann W. A novel approach to MTPA tracking control of AC drives in vehicle propulsion systems. IEEE Transactions on Vehicular Technology, 2018, 67(10): 9294-9302 doi: 10.1109/TVT.2018.2861083 [129] Dianov A, Tinazzi F, Calligaro S, Bolognani S. Review and classification of MTPA control algorithms for synchronous motors. IEEE Transactions on Power Electronics, 2022, 37(4): 3990-4007 doi: 10.1109/TPEL.2021.3123062 [130] Bolognani S, Petrella R, Prearo A, Sgarbossa L. Automatic tracking of MTPA trajectory in IPM motor drives based on AC current injection. IEEE Transactions on Industry Applications, 2011, 47(1): 105-114 doi: 10.1109/TIA.2010.2090842 [131] Bedetti N, Calligaro S, Petrella R. Stand-still self-identification of flux characteristics for Synchronous Reluctance Machines using novel saturation approximating function and multiple linear regression. IEEE Transactions on Industry Applications, 2016, 52(4): 3083-3092 doi: 10.1109/TIA.2016.2535413 [132] Uddin M N, Radwan T S, Rahman M A. Performance of interior permanent magnet motor drive over wide speed range. IEEE Power Engineering Review, 2002, 22(2): 58 [133] Lin F J, Hung Y C, Chen J M, Yeh C M. Sensorless IPMSM drive system using saliency back-EMF-based intelligent torque observer with MTPA control. IEEE Transactions on Industrial Informatics, 2014, 10(2): 1226-1241 doi: 10.1109/TII.2014.2305591 [134] Lee K W, Park S, Sungin S. A seamless transition control of sensorless PMSM compressor drives for improving efficiency based on a dual-mode operation. IEEE Transactions on Power Electronics, 2015, 30(3): 1446-1456 doi: 10.1109/TPEL.2014.2316198 [135] Do T D, Kwak S, Choi H H, Jung J W. Suboptimal control scheme design for interior permanent-magnet synchronous motors: An SDRE-based approach. IEEE Transactions on Power Electronics, 2014, 29(6): 3020-3031 doi: 10.1109/TPEL.2013.2272582 [136] Ortombina L, Tinazzi F, Zigliotto M. Magnetic modeling of synchronous reluctance and internal permanent magnet motors using radial basis function networks. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1140-1148. doi: 10.1109/TIE.2017.2733502 [137] Fontana M, Bianchi N. Design and analysis of normal saliency IPM spoke motor. IEEE Transactions on Industry Applications, 2020, 56(4): 3625-3635 [138] Balamurali A, Feng G D, Kundu A, Dhulipati H, Kar N C. Noninvasive and improved torque and efficiency calculation toward current advance angle determination for maximum efficiency control of PMSM. IEEE Transactions on Transportation Electrification, 2020, 6(1): 28-40 doi: 10.1109/TTE.2019.2962333 [139] Andersson A, Lennstrom D, Nykanen A. Influence of inverter modulation strategy on electric drive efficiency and perceived sound quality. IEEE Transactions on Transportation Electrification, 2016, 2(1): 24-35 doi: 10.1109/TTE.2015.2514162 [140] Ni R G, Xu G, Wang G L, Ding L, Zhang G Q, Qu L Z. Maximum efficiency per ampere control of permanent-magnet synchronous machines. IEEE Transactions on Industrial Electronics, 2015, 62(4): 2135-2143 doi: 10.1109/TIE.2014.2354238 [141] Uddin M N, Rahman M M, Patel B, Venkatesh B. Performance of a loss model based nonlinear controller for IPMSM drive incorporating parameter uncertainties. IEEE Transactions on Power Electronics, 2019, 34(6): 5684-5696 doi: 10.1109/TPEL.2018.2871033 [142] Cavallaro C, Di Tommaso A O, Miceli R, Raciti A, Galluzzo G R, Trapanese M. Efficiency enhancement of permanent-magnet synchronous motor drives by online loss minimization approaches. IEEE Transactions on Industrial Electronics, 2005, 52(4): 1153-1160 doi: 10.1109/TIE.2005.851595 [143] Lai C Y, Feng G D, Tian J B, Li Z, Zuo Y, Balamurali A, et al. PMSM drive system efficiency optimization using a modified gradient descent algorithm with discretized search space. IEEE Transactions on Transportation Electrification, 2020, 6(3): 1104-1114 doi: 10.1109/TTE.2020.3004463 [144] Balamurali A, Kundu A, Li Z, Kar N C. Improved harmonic iron loss and stator current vector determination for maximum efficiency control of PMSM in EV applications. IEEE Transactions on Industry Applications, 2021, 57(1): 363-373 doi: 10.1109/TIA.2020.3034888 [145] Sreejeth M, Singh M, Kumar P. Particle swarm optimisation in efficiency improvement of vector controlled surface mounted permanent magnet synchronous motor drive. IET Power Electronics, 2015, 8(5): 760-769 doi: 10.1049/iet-pel.2014.0399 -

 下载:
下载:

计量
- 文章访问数: 3046
- HTML全文浏览量: 1880
- PDF下载量: 725
- 被引次数: 0
