

Airborne Radar Measurement Modeling Based on Improved Carrier Air Wake Model and Multi-layer Coupling Analysis
-
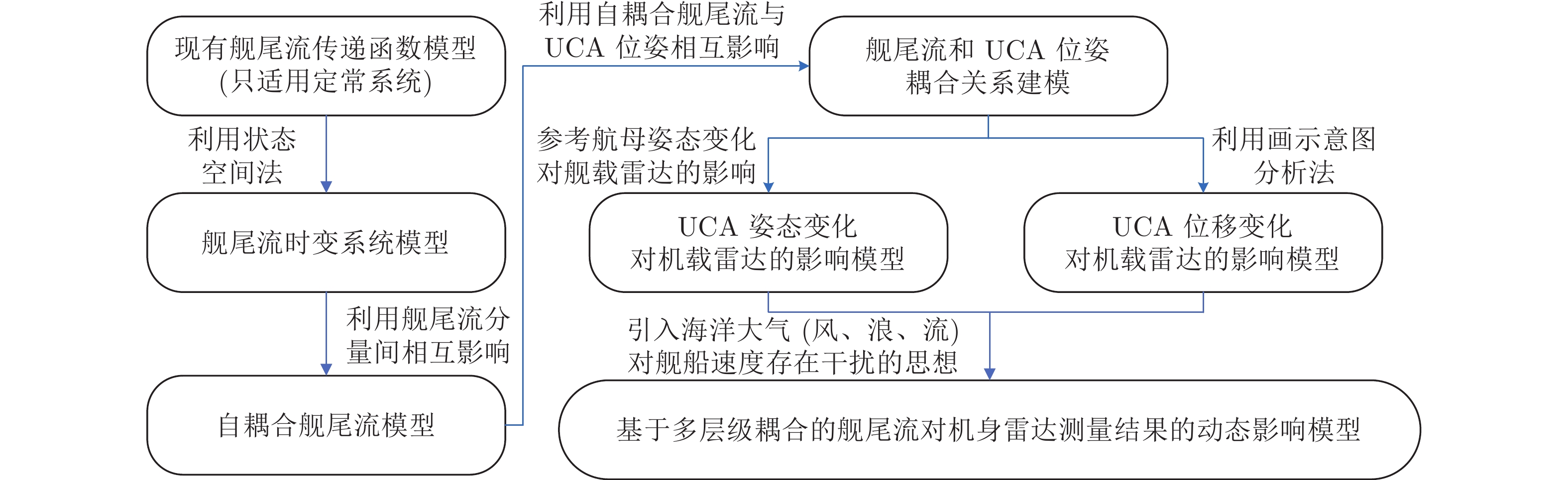
摘要: 为提高复杂海洋环境中无人舰载机(Unmanned carrier-based aircraft, UCA)自动着舰时导航定位的准确性, 研究舰尾流对机载雷达测量过程的动态影响问题, 建立一种基于多层级耦合性分析的测量影响动态建模分析方法. 首先, 利用直接分解法和前向差分法建立一种基于离散化状态空间的时变舰尾流模型, 以克服传统传递函数方法存在的局限性; 其次, 基于舰尾流各分量均与飞机飞行速度相关的客观事实, 通过在时变系统中考虑舰尾流分量间的相互作用关系来构建一种更符合实际系统特征的分量自耦合舰尾流模型; 紧接着, 采用UCA姿态角变化能够改变坐标转换矩阵的思想, 研究舰尾流与UCA位姿变化间的耦合联系, 提出一种准确性更高的舰尾流对UCA位姿的深度影响模型; 然后, 以航母姿态变化对舰载雷达测量结果的影响模型为基础, 通过考虑本研究场景的内在特性, 建立UCA姿态变化对雷达测量结果的影响模型分析方法; 紧接着, 采用示意图方式获得位移变化对机载雷达测量结果的影响模型; 最后, 针对舰船受海洋大气(风、浪、流)干扰而出现失速这一现象, 建立实际海洋环境中舰尾流对机载雷达测量结果的非线性非高斯影响分析模型. 仿真实验研究验证了上述模型分析方法的有效性和优越性.Abstract: To improve the accuracy of navigation and positioning for unmanned carrier-based aircraft (UCA) automatic landing in complex marine environments, this study investigated the dynamic effects of carrier air wake on onboard radar measurements and established a modeling and analysis method based on multi-level coupling analysis. Firstly, a time-varying carrier air wake model based on a state-space discretization approach using direct decomposition and forward differences was developed to overcome the limitations of traditional transfer function methods. Secondly, a component self-coupling carrier air wake model was constructed to be more consistent with actual system characteristics by considering the interaction between components, which are all related to the aircraft's flight speed. Thirdly, a more accurate depth effect model of carrier air wake on UCA's position was proposed by studying the coupling relationship between carrier air wake and UCA's attitude changes through the concept of coordinate transformation matrices. Subsequently, an analysis method of the effect of UCA's attitude changes on radar measurements was developed based on the impact of aircraft carrier attitude changes on radar measurements. Then, a displacement change effect model on onboard radar measurements was obtained using a diagrammatic approach. Finally, a nonlinear and non-Gaussian effect analysis model of carrier air wake on onboard radar measurements in actual marine environments was established to address aircraft stalling caused by atmospheric disturbances such as wind, waves, and currents. Simulation experiments showed the effectiveness and superiority of the proposed modeling and analysis methods.
-
Key words:
- Carrier air wake /
- airborne radar /
- state space /
- coupling /
- nonlinear non-Gaussian
-
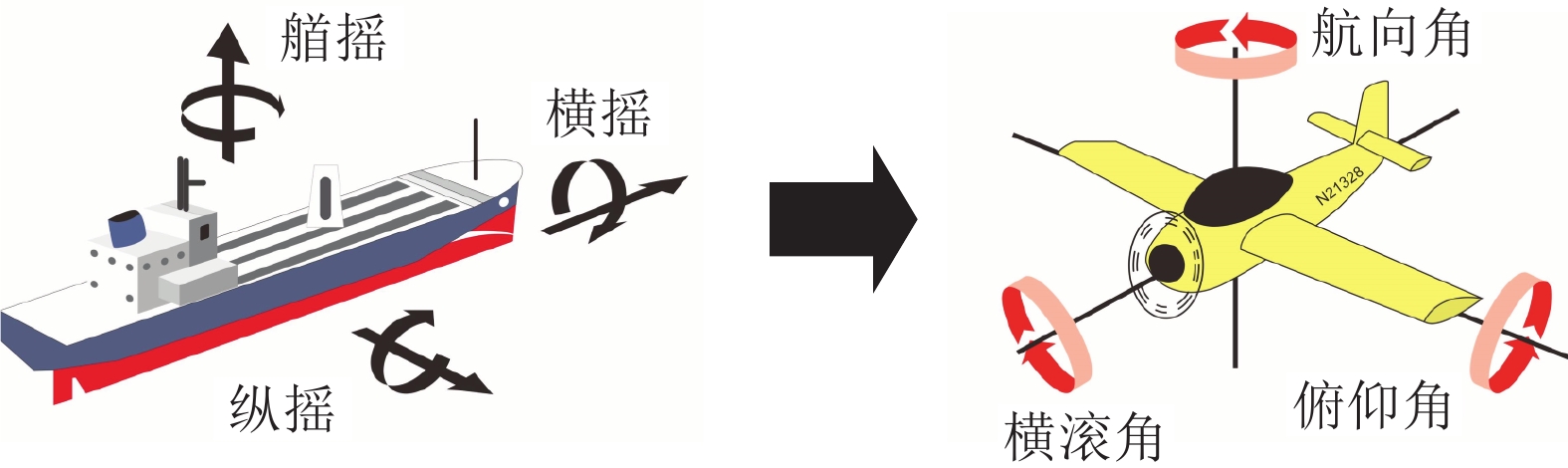
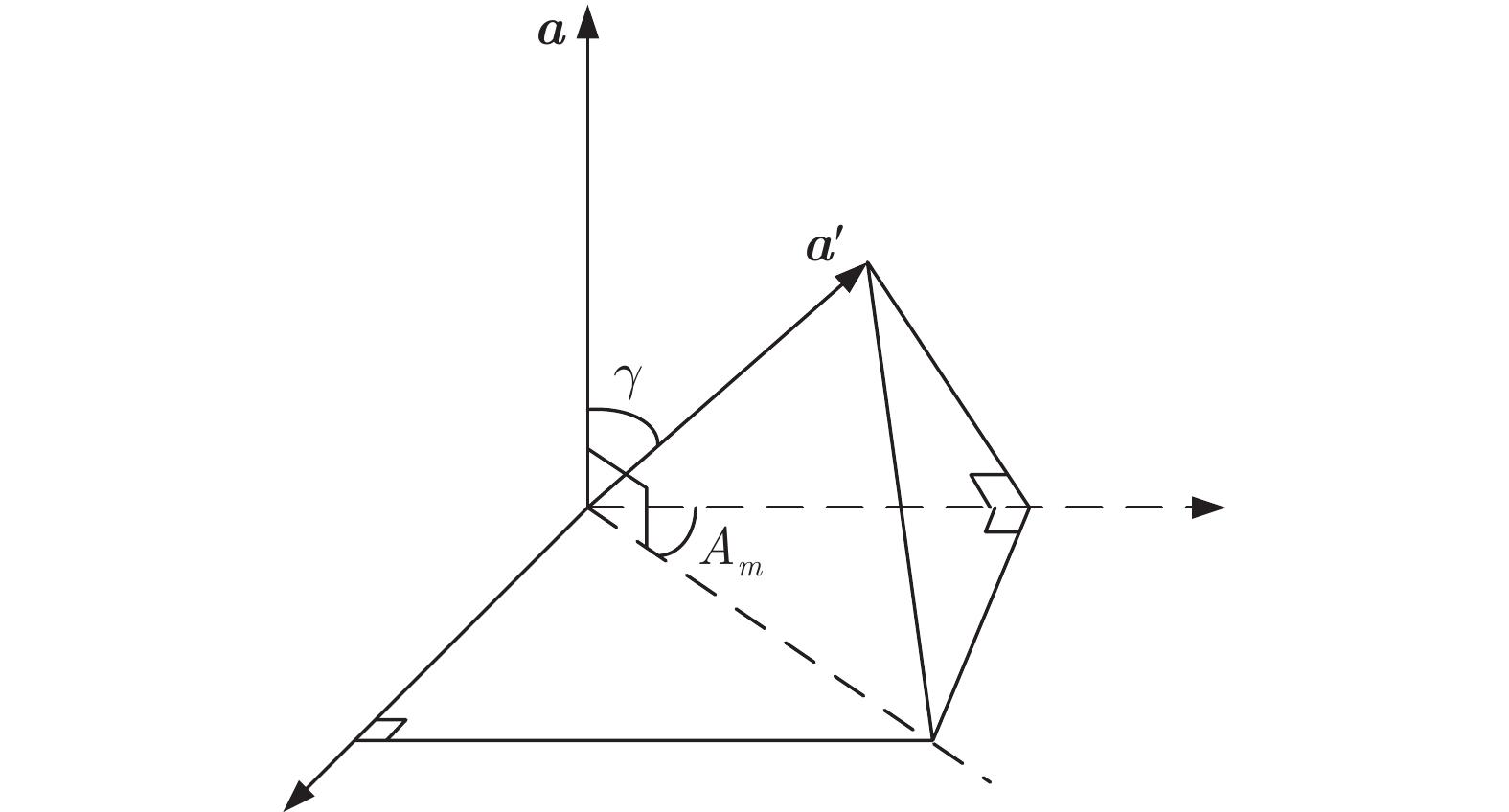
图 3 航母姿态角对应无人机姿态角示意图
Fig. 3 Schematic diagram of UCA attitude angle corresponding to aircraft carrier attitude angle
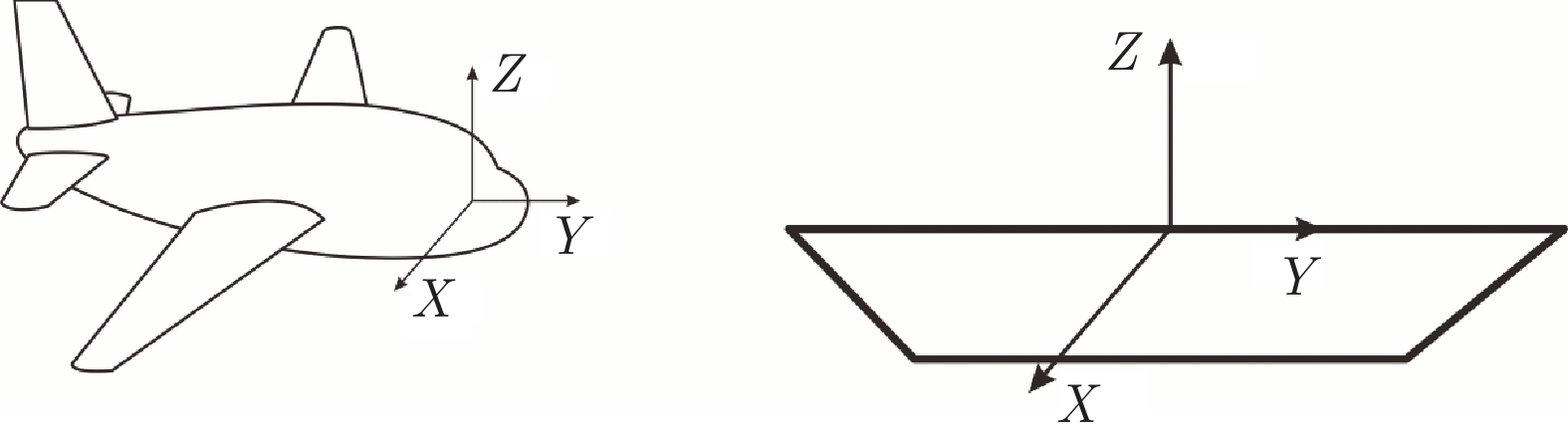
图 4 不同平台中雷达所处位置坐标示意图
Fig. 4 Schematic diagram of radar position coordinates in different platforms
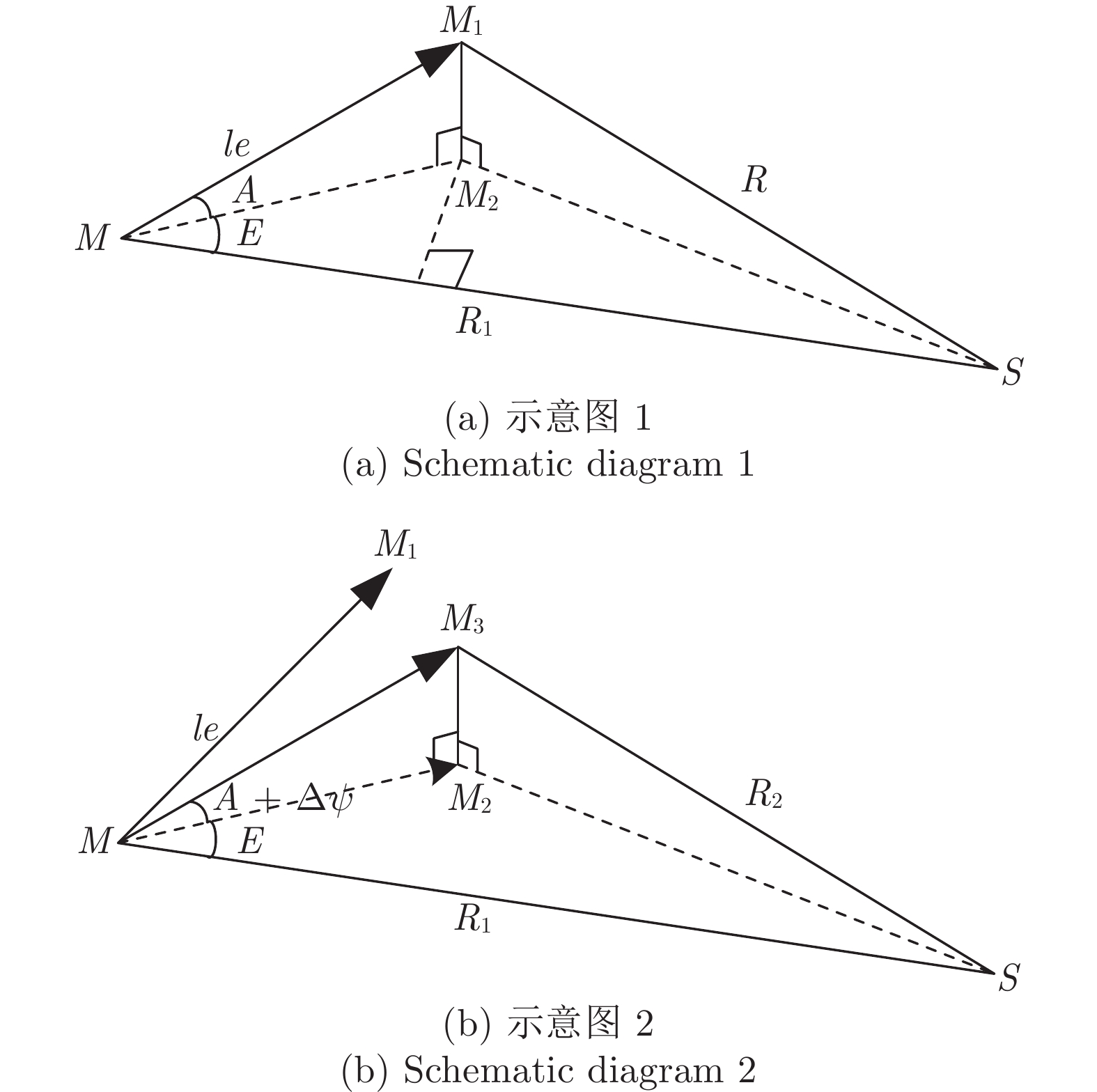
图 6 姿态变化对传感器测量的距离影响示意图
Fig. 6 Schematic diagram of the influence of attitude change on the distance measured by the sensor

图 7 UCA位置确定示意图和位置变化示意图
Fig. 7 UCA location determination diagram and location change diagram
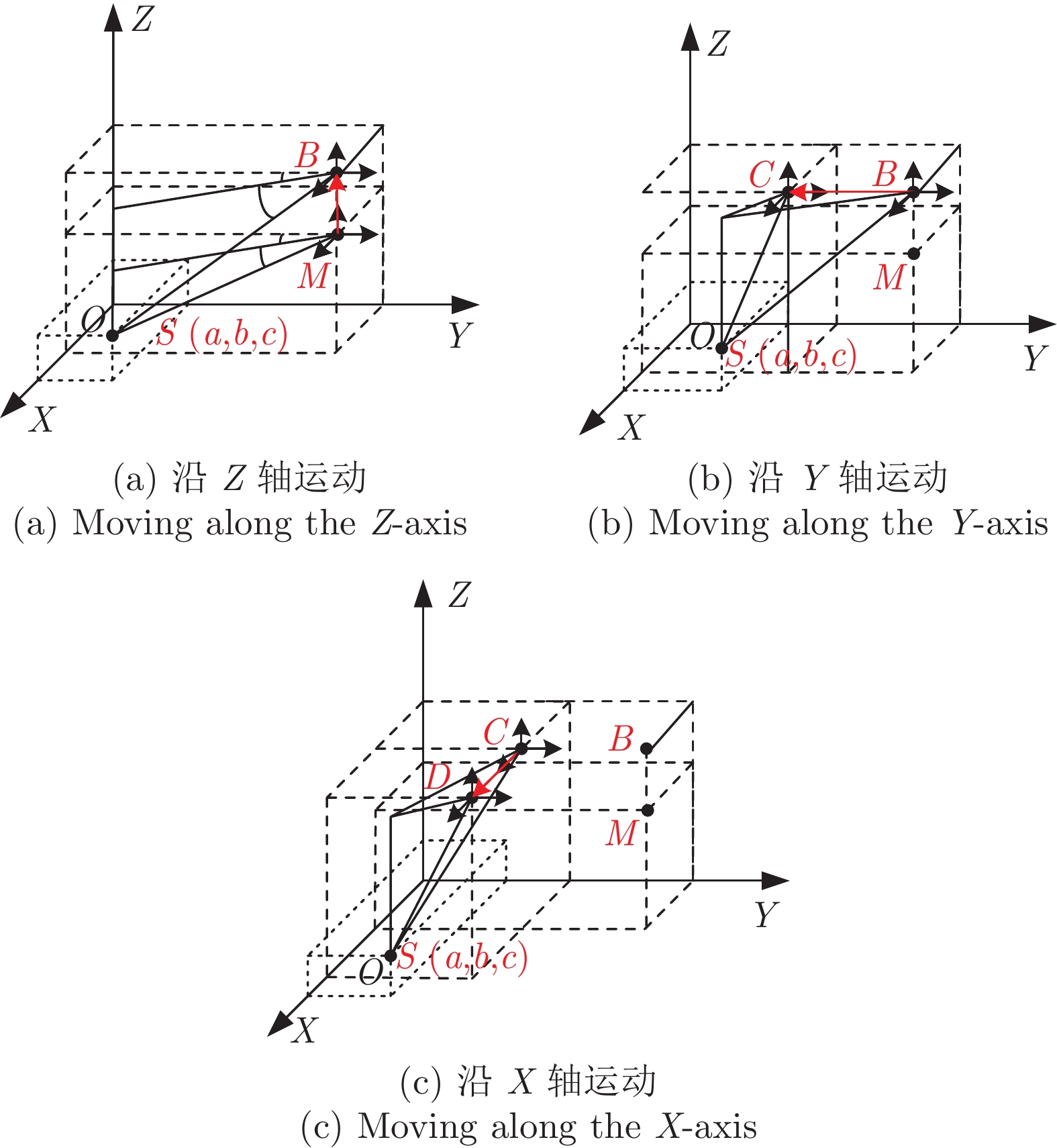
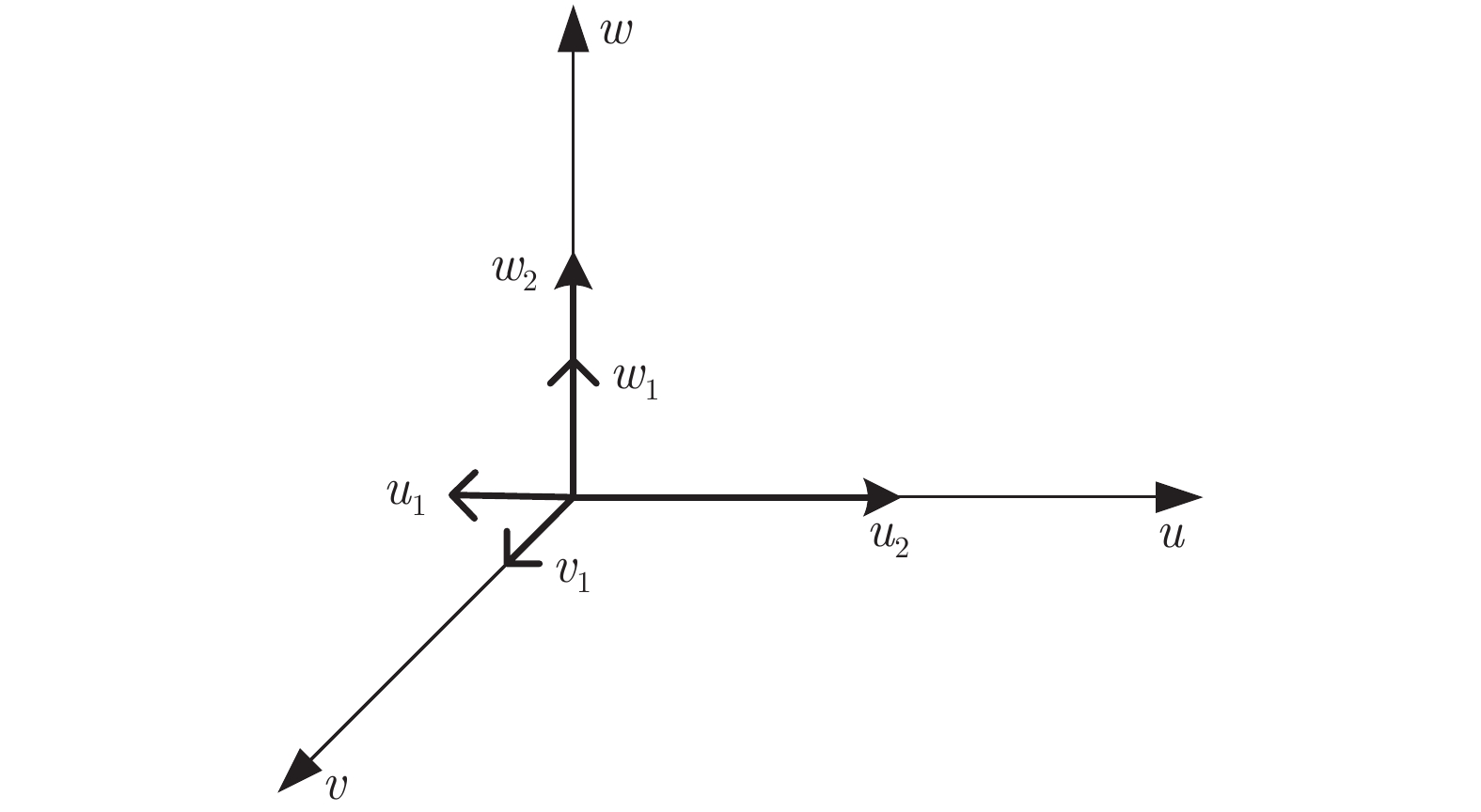
图 8 沿Z轴、Y轴和X轴运动的测量影响示意图
Fig. 8 Schematic diagram of measurement effects along Z-axis, Y-axis and X-axis movements

图 9 大气紊流状态空间模型三个方向风速对比图
Fig. 9 Comparison of wind speeds in three directions of the spatial model of atmospheric turbulence states

图 10 随机分量状态空间模型三个方向风速对比图
Fig. 10 Comparison plot of wind speeds in three directions of the stochastic component state space model

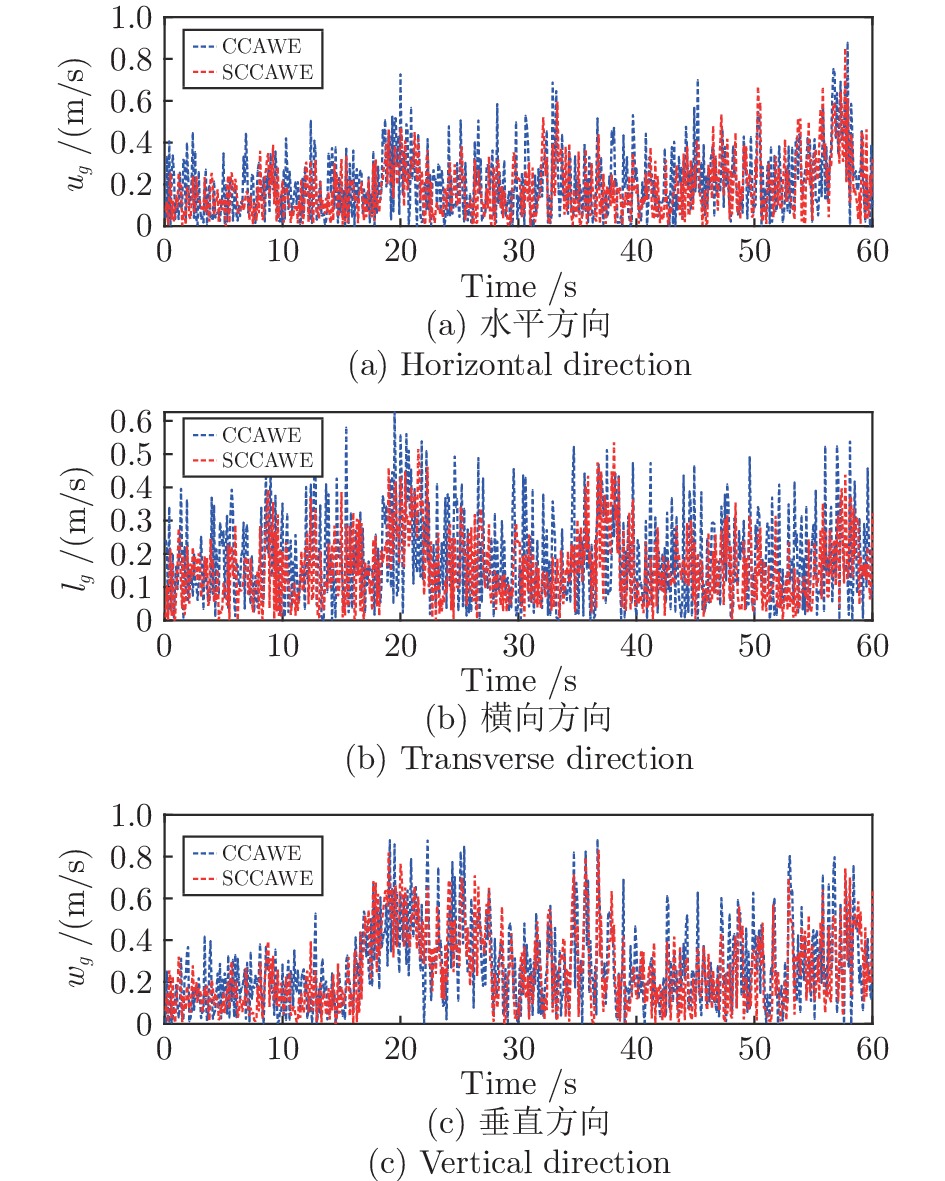
图 11 不同舰尾流模型三个方向风速对比图
Fig. 11 Comparison chart of wind speeds in three directions for different carrier air wake models
图 12 不同舰尾流模型三个方向风速误差对比图
Fig. 12 Comparison of wind speed errors in three directions of different carrier air wake models

图 13 惯性坐标系三轴方向的位移变化模型
Fig. 13 Displacement variation model in three-axis direction in inertial coordinate system
图 14 惯性坐标系三轴方向的位移变化误差对比图
Fig. 14 Comparison plot of displacement change error in the triaxial direction of the inertial coordinate system

图 17 位移变化对机载雷达测量结果的影响仿真对比图
Fig. 17 Simulation comparison diagram of the influence of displacement change on the measurement accuracy of airborne radar
图 18 位移变化对雷达测量结果的影响误差仿真对比图
Fig. 18 Error simulation comparison diagram of influence of displacement change on radar measurement accuracy
图 19 姿态变化对雷达测量结果的影响仿真对比图
Fig. 19 Simulation comparison diagram of the influence of attitude change on radar measurement accuracy
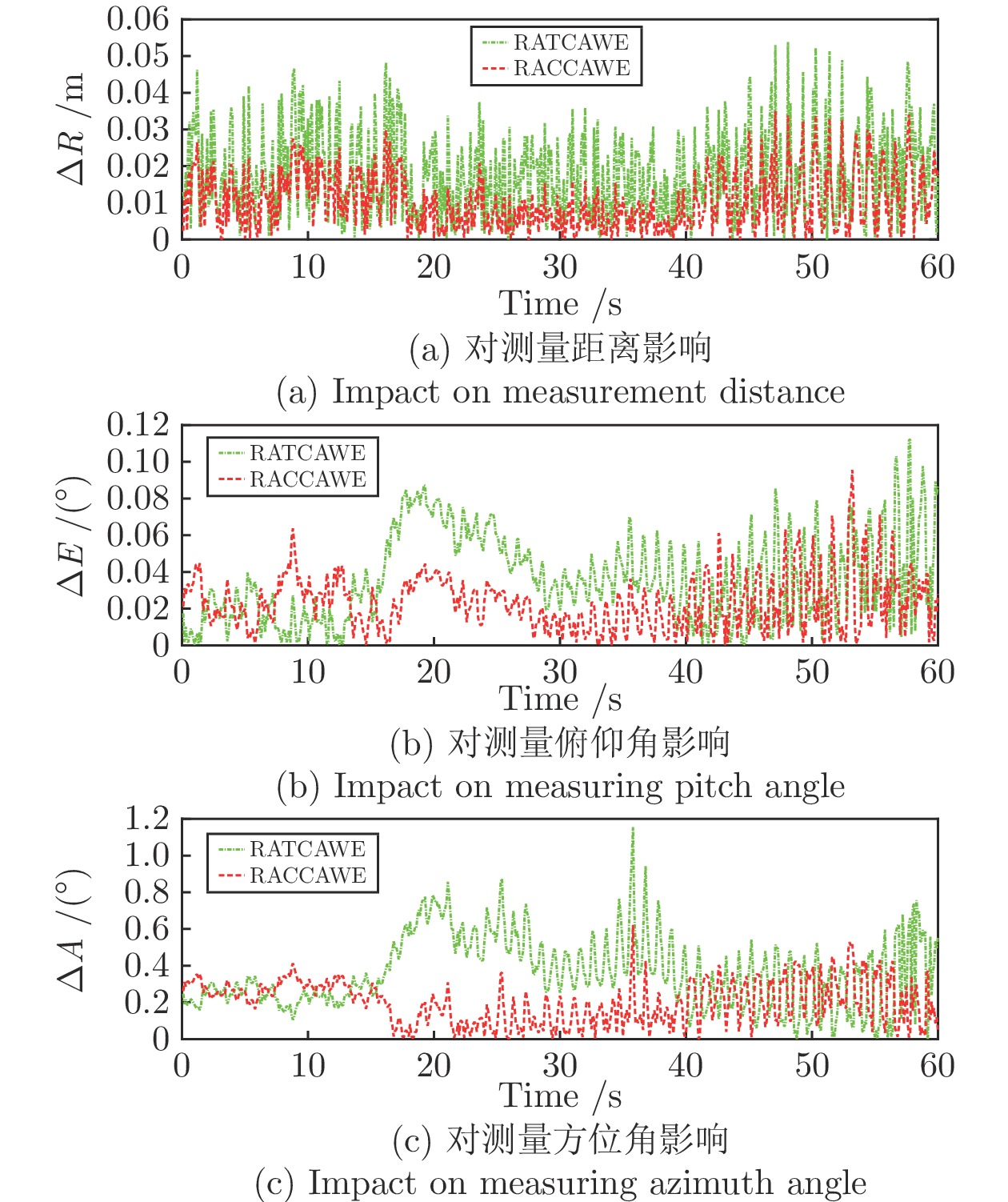
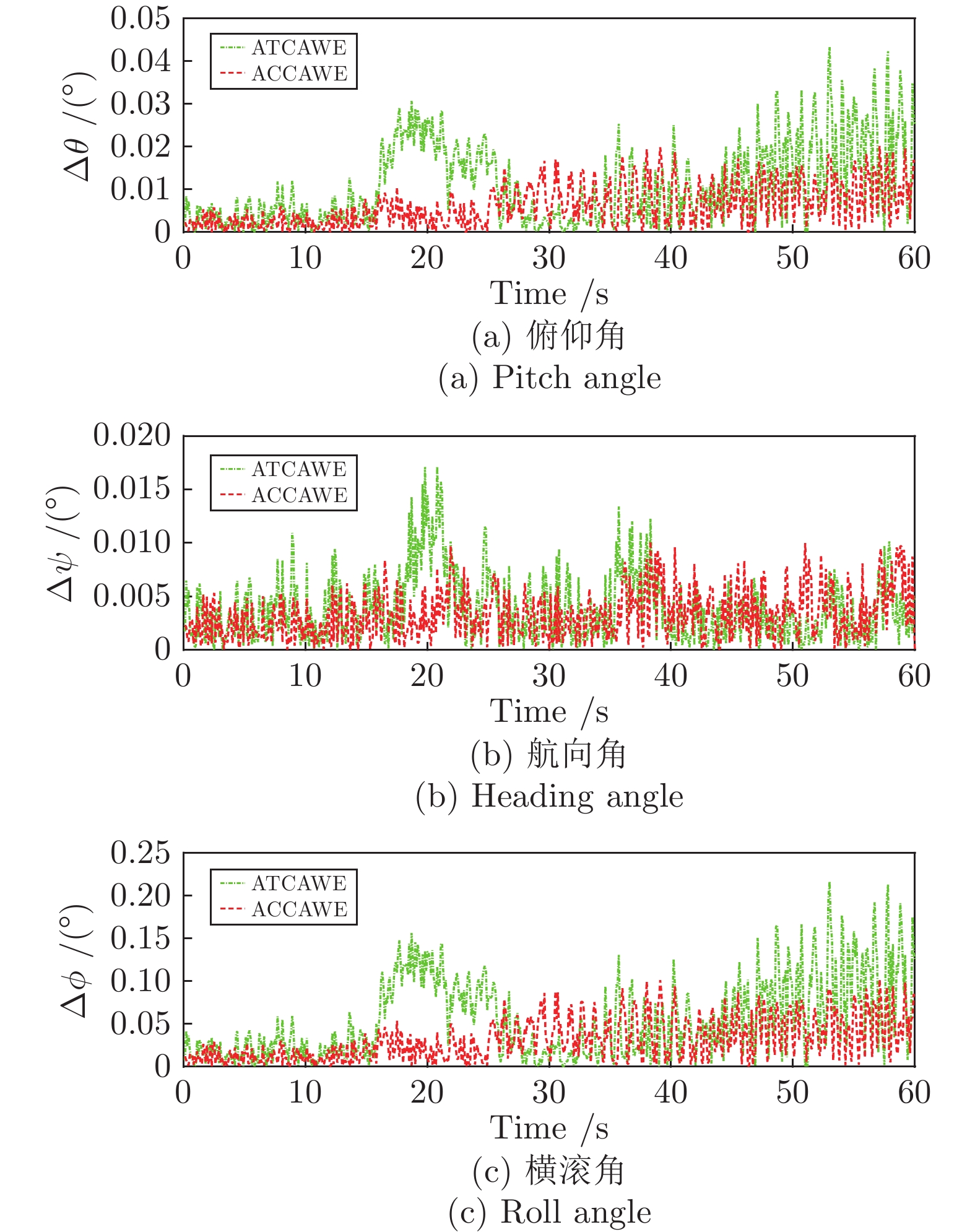
图 20 姿态变化对雷达测量结果的影响误差仿真对比图
Fig. 20 Error simulation comparison diagram of influence of attitude change on airborne radar measurement accuracy
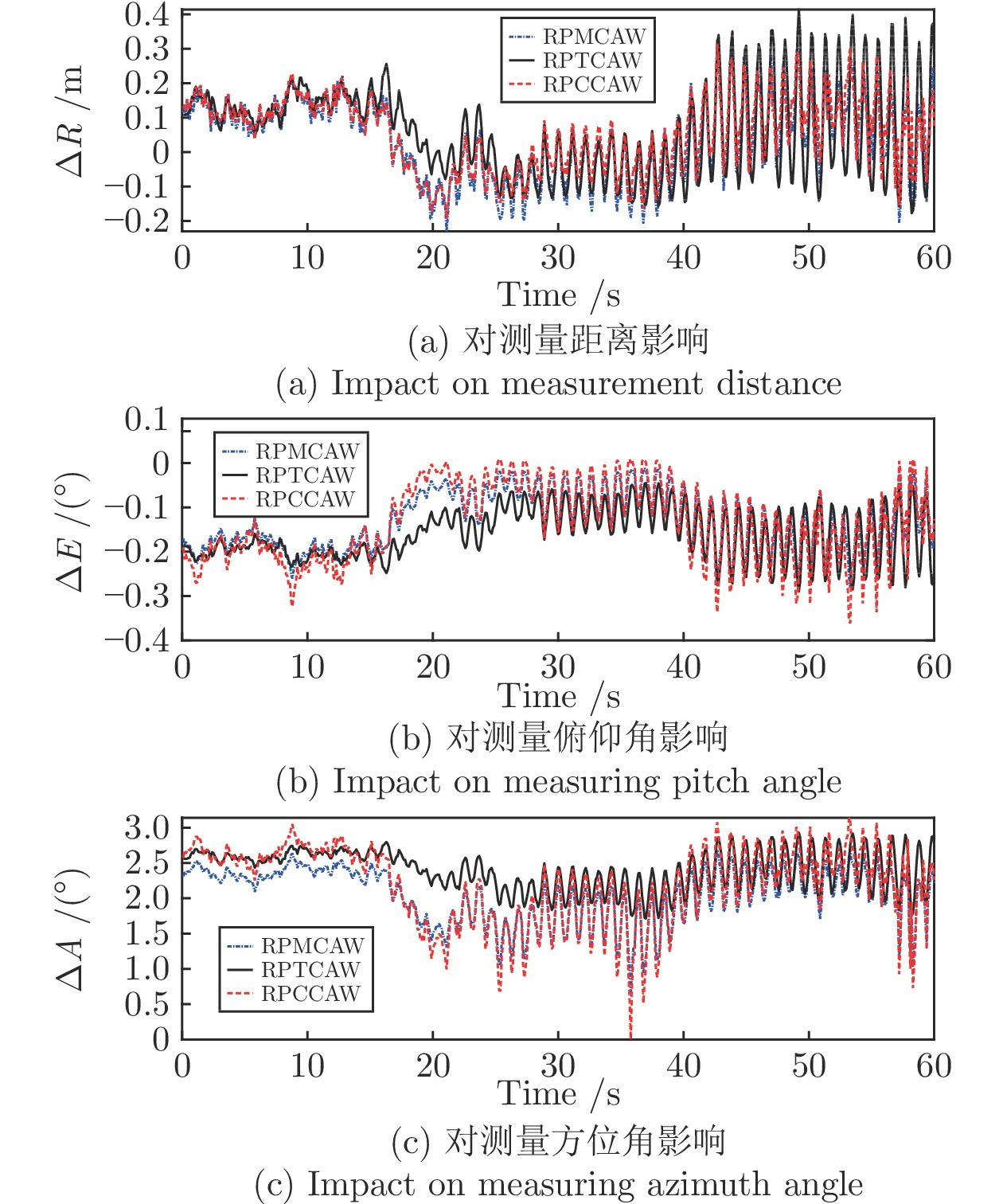
图 21 位姿变化对机载雷达测量结果的影响仿真对比图
Fig. 21 Simulation comparison diagram of the influence of position and attitude changes on the measurement accuracy of airborne radar

图 22 位姿变化对雷达测量结果的影响误差仿真对比图
Fig. 22 Error simulation comparison diagram of influence of position and attitude change on airborne radar measurement accuracy
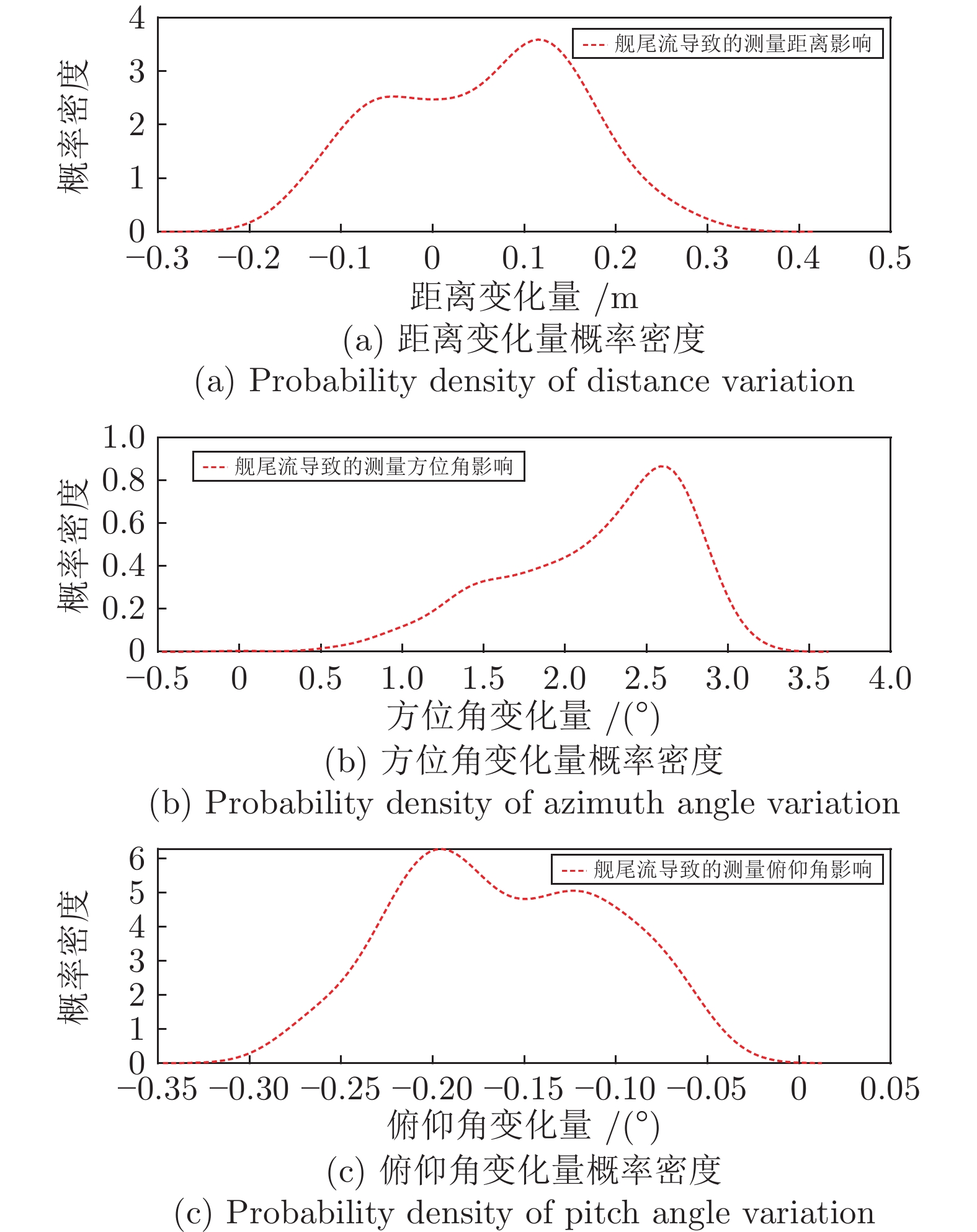
图 23 舰尾流对雷达测量结果影响的非高斯性验证
Fig. 23 Verification of non-Gaussian effect of ship wake on radar measurement accuracy

图 25 两种模型对雷达测量结果影响的误差仿真对比图
Fig. 25 Error simulation comparison diagram of the influence of two models on radar measurement results
表 1 三种模型均方根误差结果
Table 1 Root mean square error results of three models
TCAW ACAW CCAW $u_g\text{-}{\rm{RMSE}} $ 0.4791 0.3036 0.2979 $l_g\text{-}{\rm{RMSE}} $ 0.2481 0.2025 0.1951 $w_g\text{-}{\rm{RMSE}} $ 0.7180 0.3960 0.3918  下载: 导出CSV
下载: 导出CSV
表 2 两种位移变化模型均方根误差结果
Table 2 Root mean square error results of two displacement variation models
DTCAW DCCAW dx-RMSE 0.0442 0.0240 dy-RMSE 0.0661 0.0410 dz-RMSE 0.0393 0.0218
下载: 导出CSV
表 3 两种姿态变化模型均方根误差结果
Table 3 Root mean square error results of two attitude change models
ATCAW ACCAW ${\rm{d}}\theta$-RMSE 0.0144 0.0079 ${\rm{d}}\psi$-RMSE 0.0050 0.0040 ${\rm{d}}\phi$-RMSE 0.0720 0.0397
下载: 导出CSV
表 4 两种位移变化干扰下测量影响模型均方根误差结果
Table 4 Root mean square error results of measurement influence model under two kinds of displacement changes
RDTCAW RDCCAW dR-RMSE 0.0664 0.0356 dE-RMSE 5.5629 × 10−4 2.6464 × 10−4 dA-RMSE 8.2381 × 10−4 2.6558 × 10−4
下载: 导出CSV
表 5 两种姿态变化干扰下测量影响模型均方根误差结果
Table 5 Root mean square error results of measurement influence model under two kinds of attitude changes
RATCAW RACCAW ${\rm{d}}R$-RMSE 0.0213 0.0130 ${\rm{d}}E$-RMSE 0.0436 0.0276 ${\rm{d}}A$-RMSE 0.4117 0.2321
下载: 导出CSV
表 6 两种位姿变化干扰下测量影响模型均方根误差结果
Table 6 Root mean square error results of measurement influence model under the interference of two kinds of posture changes
RPTCAW RPCCAW ${\rm{d}}R$-RMSE 0.0745 0.0347 ${\rm{d}}E$-RMSE 0.0436 0.0277 ${\rm{d}}A$-RMSE 0.4117 0.2321
下载: 导出CSV
表 7 两种风速模型均方根误差结果
Table 7 Root mean square error results of two wind speed models
CCAW SCCAW $u_g\text{-}{\rm{RMSE}} $ 0.2560 0.2260 $l_g\text{-}{\rm{RMSE}} $ 0.2261 0.1905 $w_g\text{-}{\rm{RMSE}} $ 0.3316 0.3143
下载: 导出CSV
表 8 两种测量影响模型均方根误差结果
Table 8 Root mean square error results of two measurement impact models
RPCCAW WRPCCAW ${\rm{d}}R$-RMSE 0.0452 0.0379 ${\rm{d}}E$-RMSE 0.0547 0.0504 ${\rm{d}}A$-RMSE 0.6778 0.6772
下载: 导出CSV
-
[1] Ahmed R F, Golam Kibria B M. Robust ground moving target detection for airborne radar using a novel feature-based machine learning approach. Journal of the Franklin Institute, 2022, 359(9): 4449-4467 doi: 10.1016/j.jfranklin.2022.04.031 [2] Chen H M, Lu Y B, Liu J, Yi X L, Sun H W, Mu H Q, et al. Efficient knowledge-aided target relocation algorithm for airborne radar. The Journal of Engineering, 2019, 2019(21): 7589-7592 doi: 10.1049/joe.2019.0642 [3] Kang X J, Li J, Fan X T, Wan W H. Real-time RGB-D simultaneous localization and mapping guided by terrestrial LiDAR point cloud for indoor 3-D reconstruction and camera pose estimation. Applied Sciences, 2019, 9(16): Article No. 3264 doi: 10.3390/app9163264 [4] Chen L L, Lv Z Y, Shen X Y, Wu Y H, Sun X M. Adaptive attitude control for a coaxial tilt-rotor UAV via immersion and invariance methodology. IEEE/CAA Journal of Automatica Sinica, 2022, 9(9): 1710-1713 doi: 10.1109/JAS.2022.105827 [5] 王峰, 黄子路, 韩孟臣, 邢立宁, 王凌. 基于KnCMPSO算法的异构无人机协同多任务分配. 自动化学报, 2023, 49(2): 399-414Wang Feng, Huang Zi-Lu, Han Meng-Chen, Xing Li-Ning, Wang Ling. A knee point based coevolution multi-objective particle swarm optimization algorithm for heterogeneous UAV cooperative multi-task allocation. Acta Automatica Sinica, 2023, 449(2): 399-414 [6] 杨智博. 舰载机自动着舰系统纵向控制策略研究 [博士学位论文], 哈尔滨工程大学, 中国, 2020.Yang Zhi-Bo. Research on Longitudinal Control Strategy of the Automatic Carrier Landing System [Ph.D. dissertation], Harbin Engineering University, China, 2020. [7] Li X, Duan H B, Tian Y L, Wang F Y. Exploring image generation for UAV change detection. IEEE/CAA Journal of Automatica Sinica, 2022, 9(6): 1061-1072 doi: 10.1109/JAS.2022.105629 [8] 范云生, 陈欣宇, 赵永生, 宋保健. 基于扩张状态观测器的四旋翼吊挂飞行系统非线性控制. 自动化学报, 2023, 49(8): 1758-1770Fan Yun-Sheng, Chen Xin-Yu, Zhao Yong-Sheng, Song Bao-Jian. Nonlinear control of quadrotor suspension system based on extended state observer. Acta Automatica Sinica, 2023, 49(8): 1758-1770 [9] 王鑫. 飞翼布局无人机自主着舰控制关键技术研究 [博士学位论文], 南京航空航天大学, 中国, 2017.Wang Xin. Technology of Automatic Carrier Landing for Flying-Wing Unmanned Aerial Vehichle [Ph.D. dissertation], Nanjing University of Aeronautics and Astronautics, China, 2017. [10] Hao R Z, Huang J. On construction method of shipborne and airborne radar intelligence and related equipment knowledge graph. Journal of Physics: Conference Series, 2017, 887: Article No. 012042 [11] 谭文渊, 曹义华. 基于嵌套网格的舰载直升机流场仿真及风限图计算. 航空动力学报, 2020, 35(10): 2166-2175Tan Wen-Yuan, Cao Yi-Hua. Simulation of flow field and calculation of safe operating envelope of shipborne helicopter based on chimera grid. Journal of Aerospace Power, 2020, 35(10): 2166-2175 [12] Department of Defense Handbook. Flying Qualities of Piloted Aircraft, MIL-HDBK-1797, 1997. [13] 赵所, 李震, 侯中喜, 张大为. 舰尾流场扰动影响分析及抑制技术研究. 华中科技大学学报(自然科学版), 2021, 49(6): 86-91Zhao Suo, Li Zhen, Hou Zhong-Xi, Zhang Da-Wei. Study on influence analysis and rejection technology of carrier air wake. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2021, 49(6): 86-91 [14] 陶杨, 韩维. 基于改进多目标遗传算法的舰尾紊流模拟方法. 北京航空航天大学学报, 2015, 41(3): 443-448Tao Yang, Han Wei. Carrier airwake simulation methods based on improved multi-objective genetic algorithm. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(3): 443-448 [15] 罗飞, 张军红, 王博, 唐瑞琳, 唐炜. 基于直接升力与动态逆的舰尾流抑制方法. 航空学报, 2021, 42(12): 187-202Luo Fei, Zhang Jun-Hong, Wang Bo, Tang Rui-Lin, Tang Wei. Air wake suppression method based on direct lift and nonlinear dynamic inversion control. Acta Aeronautica et Astronautica Sinica, 2021, 42(12): 187-202 [16] 周俊. 舰载机着舰飞/推综合控制技术研究 [硕士学位论文], 南京航空航天大学, 中国, 2018.Zhou Jun. Research on Carrier Aircraft Landing Based on Integrated Filght/Propulsion Control [Master thesis], Nanjing University of Aeronautics and Astronautics, China, 2018. [17] 贲亮亮. 舰载机着舰环境扰动影响及其响应分析 [硕士学位论文], 南京航空航天大学, 中国, 2013.Ben Liang-Liang. The Environmental Disturbance Influence and Response Analysis on Approaching of Shipboard Aircraft [Master thesis], Nanjing University of Aeronautics and Astronautics, China, 2013. [18] 周志恒, 赵建军, 桑德一, 杨利斌. 舰艇姿态对作战系统动态对准精度的影响分析. 兵工自动化, 2016, 35(5): 51-55, 71Zhou Zhi-Heng, Zhao Jian-Jun, Sang De-Yi, Yang Li-Bin. Analysis of effects on alignment in dynamic state precision of warship combat system caused by its attitude. Ordnance Industry Automation, 2016, 35(5): 51-55, 71 [19] 桑德一, 赵建军, 杨利斌. 航母运动对着舰引导雷达精度的影响. 中国舰船研究, 2014, 9(6): 8-13 doi: 10.3969/j.issn.1673-3185.2014.06.002Sang De-Yi, Zhao Jian-Jun, Yang Li-Bin. The impact on landing guidance radar precision caused by the movement of aircraft carriers. Chinese Journal of Ship Research, 2014, 9(6): 8-13 doi: 10.3969/j.issn.1673-3185.2014.06.002 [20] 王可, 徐明亮, 李亚飞, 姜晓恒, 鲁爱国, 李鉴. 一种面向航空母舰甲板运动状态预估的鲁棒学习模型. 自动化学报, DOI: 10.16383/j.aas.c210664Wang Ke, Xu Ming-Liang, Li Ya-Fei, Jiang Xiao-Heng, Lu Ai-Guo, Li Jian. A robust learning model for deck motion prediction of aircraft carrier. Acta Automatica Sinica, DOI: 10.16383/j.aas.c210664 [21] Wang Y L, Li H, Ge Q B. A novel modeling analysis of carrier air wake based on component coupling correlation. In: Proceedings of the IEEE International Conference on Unmanned Systems (ICUS). Beijing, China: IEEE, 2021. 970−975 [22] 肖业伦, 金长江. 大气扰动中的飞行原理. 北京: 国防工业出版社, 1993.Xiao Ye-Lun, Jin Chang-Jiang. Flight Principle in Atmospheric Disturbance. Beijing: National Defense Industry Press, 1993. [23] Jiao X, Jiang J, Wang X H, Zhen Z Y. Research on effects of sea states on air wake. In: Proceedings of the 6th IEEE Conference on Industrial Electronics and Applications. Beijing, China: IEEE, 2011. 758−762 [24] 李新飞. 舰载机起降关键技术仿真研究 [博士学位论文], 哈尔滨工程大学, 中国, 2012.Li Xin-Fei. Simulation of Key Technology of Lanuch and Land for Carrier-Based Aircraft [Ph.D. dissertation], Harbin Engineering University, China, 2012. [25] Cui K K, Han W, Liu Y J, Wang X W, Su X C, Liu J. Model predictive control for automatic carrier landing with time delay. International Journal of Aerospace Engineering, 2021, 2021: Article No. 8613498 [26] Zhu Q D, Yang Z B. Design of air-wake rejection control for longitudinal automatic carrier landing cyber-physical system. Computers & Electrical Engineering, 2020, 84: Article No. 106637 [27] 牟杭. 多输入多输出振动系统状态空间建模方法研究 [硕士学位论文], 南京航空航天大学, 中国, 2018.Mou Hang. Research on State Space Modeling Method for Multi-Input and Multi-Output Vibration System [Master thesis], Nanjing University of Aeronautics and Astronautics, China, 2018. [28] Nagrath J, Goral M. Control System Engineering. Hoboken: Wiley Eastern Limited, 2016. [29] 谢莉, 杨慧中, 丁锋. 非均匀采样数据系统的新型模型描述方法. 自动化学报, 2017, 43(5): 806-813Xie Li, Yang Hui-Zhong, Ding Feng. Novel input-output representation of non-uniformly sampled-data systems. Acta Automatica Sinica, 2017, 43(5): 806-813 [30] 刘文定. 自动控制原理. 第4版. 北京: 电子工业出版社, 2018.Liu Wen-Ding. Automatic Control Principle (4th edition). Beijing: Electronic Industry Press, 2018. [31] 胡寿松. 自动控制原理. 第7版. 北京: 科学出版社, 2019.Hu Shou-Song. Automatic Control Principle (Seventh edition). Beijing: Science Press, 2019. [32] 刘豹, 唐万生. 现代控制理论. 北京: 机械工业出版社, 2017.Liu Bao, Tang Wan-Sheng. Modern Control Theory. Beijing: China Machine Press, 2017. [33] 段广仁. 高阶系统方法-II. 能控性与全驱性. 自动化学报, 2020, 46(8): 1571-1581Duan Guang-Ren. High-order system approaches: Ⅱ. Controllability and full-actuation. Acta automatica Sinica, 2020, 46(8): 1571-1581 [34] Li W, Zhao S X, Liu K, Lu H C, Fan T H. Dynamic response calculation algorithm for floating offshore wind turbines based on a state-space method of transfer function. Frontiers in Energy Research, 2022, 10: 909416 doi: 10.3389/fenrg.2022.909416 [35] 田玉平. 自动控制原理. 北京: 科学出版社, 2018.Tian Yu-Ping. Automatic Control Principle. Beijing: Science Press, 2018. [36] Bartecki K. Approximate state-space and transfer function models for 2@2 linear hyperbolic systems with collocated boundary inputs. International Journal of Applied Mathematics and Computer Science, 2020, 30(3): 475-491 [37] 李繁飙, 杨皓月, 王鸿鑫, 阳春华, 廖力清. 基于干扰估计的非对称运动下飞机刹车系统模型预测控制. 自动化学报, 2022, 48(7): 1690-1703Li Fan-Biao, Yang Hao-Yue, Wang Hong-Xin, Yang Chun-Hua, Liao Li-Qing. Model predictive control of aircraft braking system under asymmetric motion based on disturbance estimation. Acta Automatica Sinica, 2022, 48(7): 1690-1703 [38] 李繁飙, 黄培铭, 阳春华, 廖力清, 桂卫华. 基于非线性干扰观测器的飞机全电刹车系统滑模控制设计. 自动化学报, 2021, 47(11): 2557-2569Li Fan-Biao, Huang Pei-Ming, Yang Chun-Hua, Liao Li-Qing, Gui Wei-Hua. Sliding mode control design of aircraft electric brake system based on nonlinear disturbance observer. Acta Automatica Sinica, 2021, 47(11): 2557-2569 [39] 孙荣恒. 应用数理统计. 第3版. 北京: 科学出版社, 2014.Sun Rong-Heng. Applied Mathematical Statistics (3rd edition). Beijing: Science Press, 2014. [40] 李永泉, 郭雨, 张阳, 张立杰. 基于牛顿欧拉法的一种空间被动过约束并联机构动力学建模方法. 机械工程学报, 2020, 56(11): 48-57 doi: 10.3901/JME.2020.11.048Li Yong-Quan, Guo Yu, Zhang Yang, Zhang Li-Jie. Dynamic modeling method of spatial passive over-constrained parallel mechanism based on newton Euler method. Journal of Mechanical Engineering, 2020, 56(11): 48-57 doi: 10.3901/JME.2020.11.048 [41] 谢新连, 王余宽, 何傲, 潘伟, 许小卫. 考虑风浪流影响的船舶路径规划及算法. 重庆交通大学学报(自然科学版), 2022, 41(7): 1-8Xie Xin-Lian, Wang Yu-Kuan, He Ao, Pan Wei, Xu Xiao-Wei. Ship path planning and algorithm considering the effect of wind, wave and current. Journal of Chongqing Jiaotong University (Natural Science), 2022, 41(7): 1-8 [42] 魏照坤. 风浪影响下的集装箱船舶航速优化 [博士学位论文], 大连海事大学, 中国, 2018.Wei Zhao-Kun. The Containerships Sailing Speed Optimization Considering Wind and Waves [Ph.D. dissertation], Dalian Maritime University, China, 2018. [43] 国强, 李文韬. 基于正则化约束总体最小二乘的TDOA/FDOA无源定位方法. 哈尔滨工业大学学报, 2022, 54(5): 81-87Guo Qiang, Li Wen-Tao. Passive TDOA/FDOA location based on regularized constrained total least squares. Journal of Harbin Institute of Technology, 2022, 54(5): 81-87 -

 下载:
下载:


计量
- 文章访问数: 972
- HTML全文浏览量: 287
- PDF下载量: 160
- 被引次数: 0
