

Parallel Management: The DAO to Smart Ecological Technology for Complexity Management Intelligence
-
摘要: 本文介绍平行管理的基本原理和框架流程及其核心任务与相应的生态科技: 即利用虚实互动、平行驱动以及智能科学与技术, 使知识工作可以衡量, 并对量化后的知识工作者之社会行为进行以人为本, 基于复杂性科学的引导与管理, 形成可信、可靠、可用、高效益上DAO (全中心化自主组织及其全中心化自主运行)的可编程智慧管理生态, 实现社会可持续性发展. 以此为目标, 我们提出利用基础模型和学科交叉, 融合区块链智能和DeSci及DeSoc等技术, 构建管理科学的新范式, 推动从管理的案例教学到管理的场景工程建设. 我们认为, 管理科学与技术的这一变革, 必将推动社会从工业向智业形态的加速升华, 造福整个人类世界和自然生态.Abstract: This paper outlines basic principles, frameworks and processes of parallel management, and its core tasks and corresponding ecological technologies. Our object is using virtual-real interaction, parallel driven, and intelligent science and technology to make knowledge works measurable, to prescribe and manage the quantified social behaviors of knowledge workers in a human-centered and complexity-science-supported approach, and to build a trustworthy, reliable, usable, effective/efficient, and DAO (decentralized autonomous organizations and decentralized autonomous operations) based smart management ecology. Towards this goal, we need a system of intelligent management education that would transform current case studies to future scenarios engineering for management innovation, facilitated by foundation models, interdisciplinary studies, blockchain intelligence, DeSci as well as DeSoc. We believe that such paradigm shift in management science and technology would speed up the transformation of our societies to future smart societies for the benefit of our humankind as well as our natural ecology.
-
Key words:
- Parallel management /
- parallel economics /
- parallel intelligence /
- management intelligence /
- metaverses /
- blockchain /
- smart contracts /
- complexity science /
- complexity management /
- intuitive rationality /
- adaptative rationality /
- computational rationality /
- knowledge automation /
- narrative management /
- DeSoc /
- DeSci /
- DeOrg /
- DeEnterprises /
- DAO
-

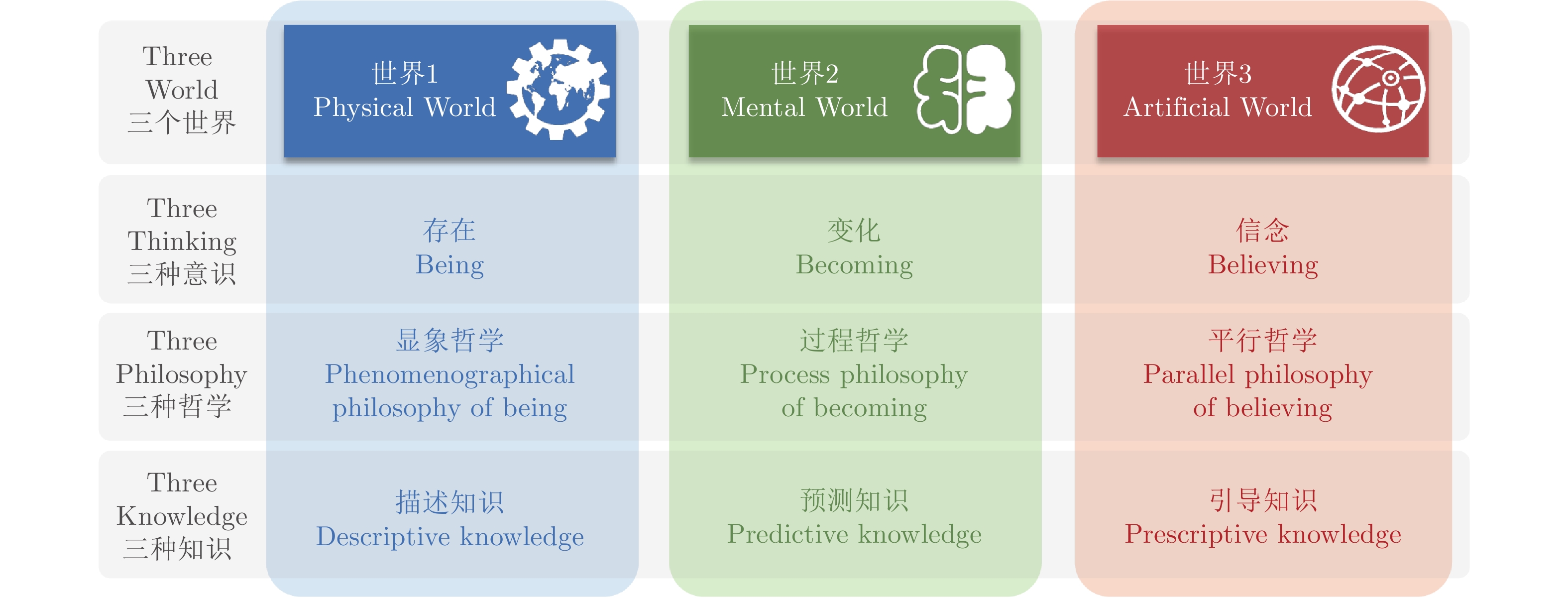
图 1 管理的新境界: 三个世界、三类管理者、三种理性
Fig. 1 The new management: Three worlds, three managers and three rationalities
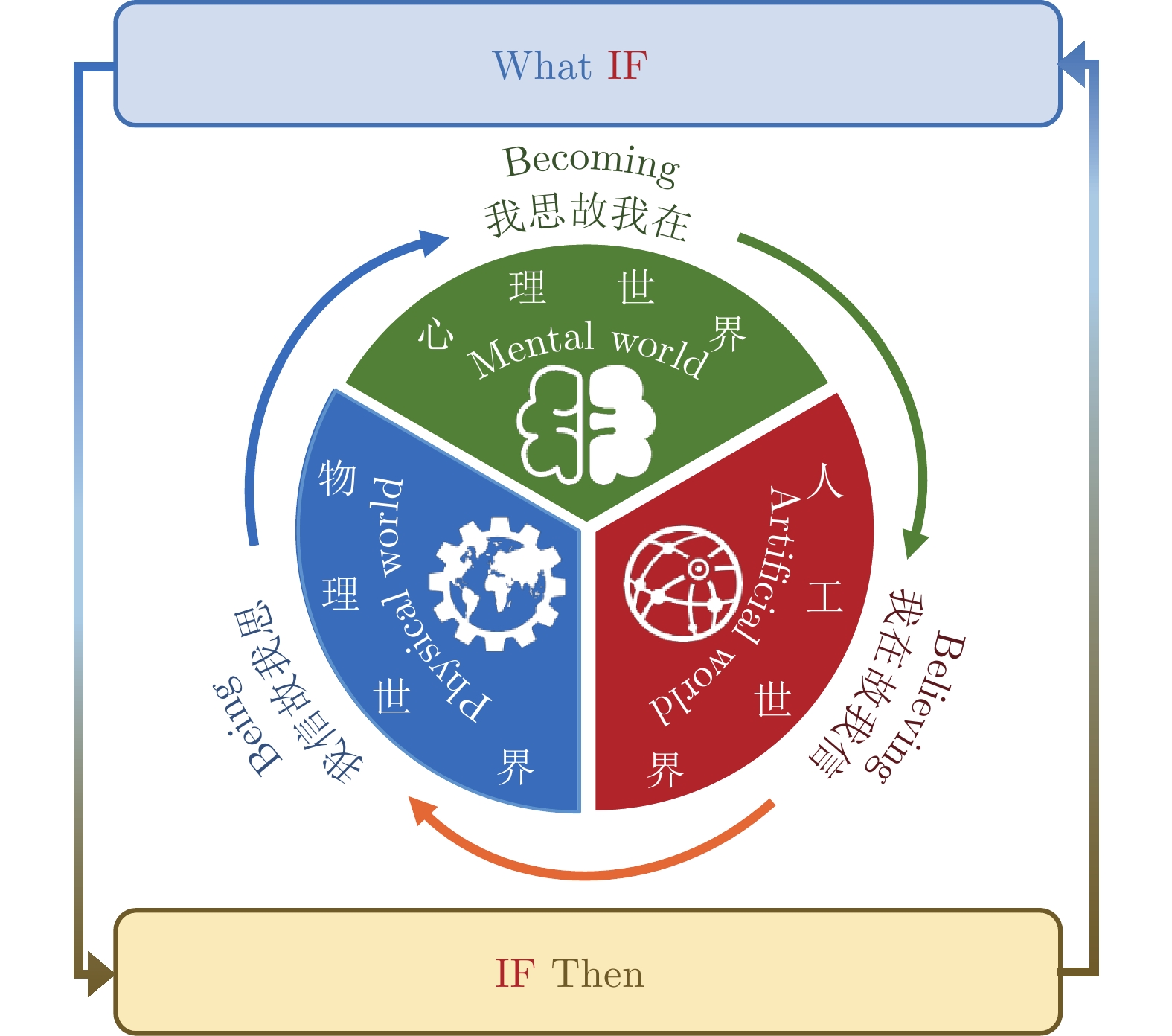
图 2 广义循环因果: 从机械反馈到有机反馈
Fig. 2 Generalized circular causality: From mechanical feedback to organic feedback
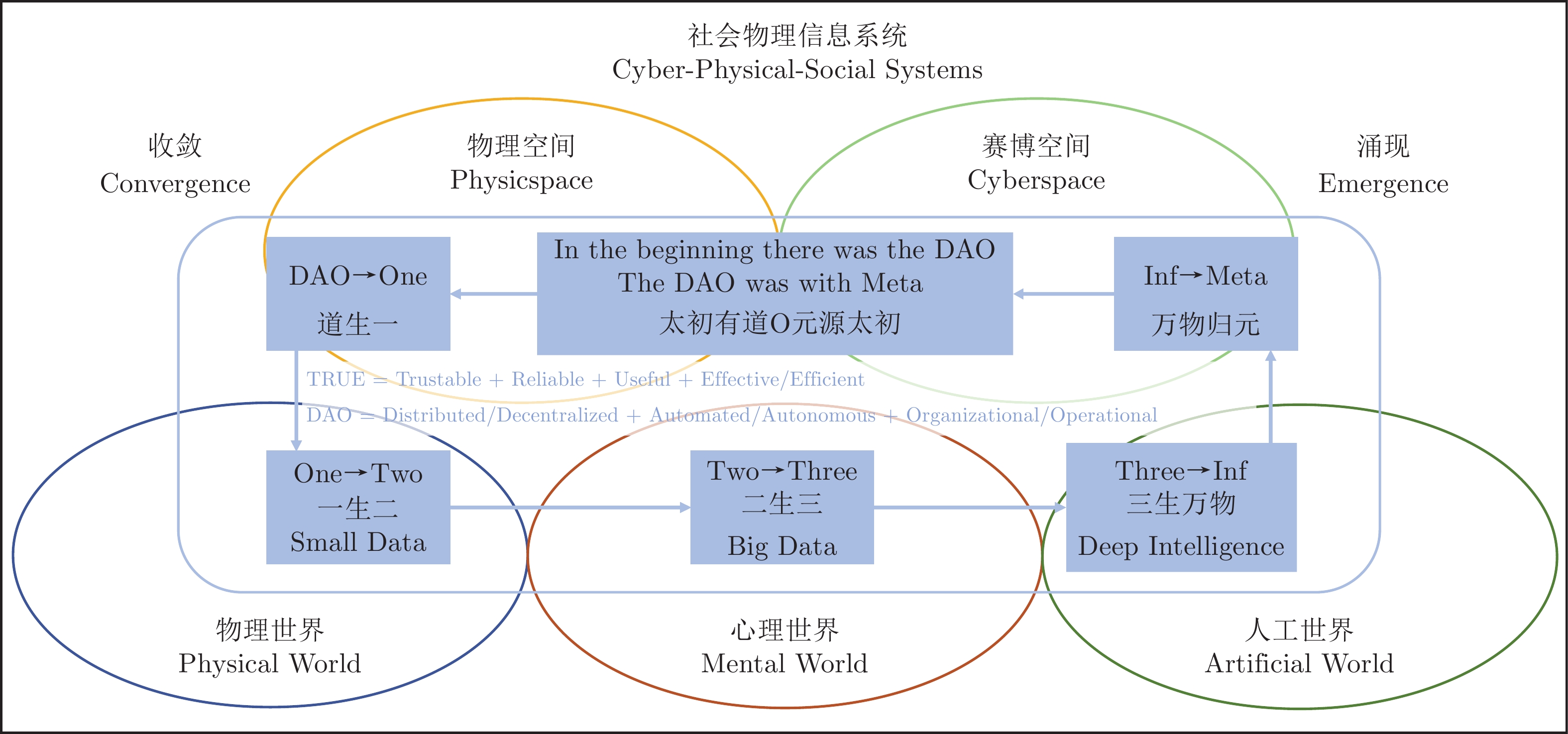
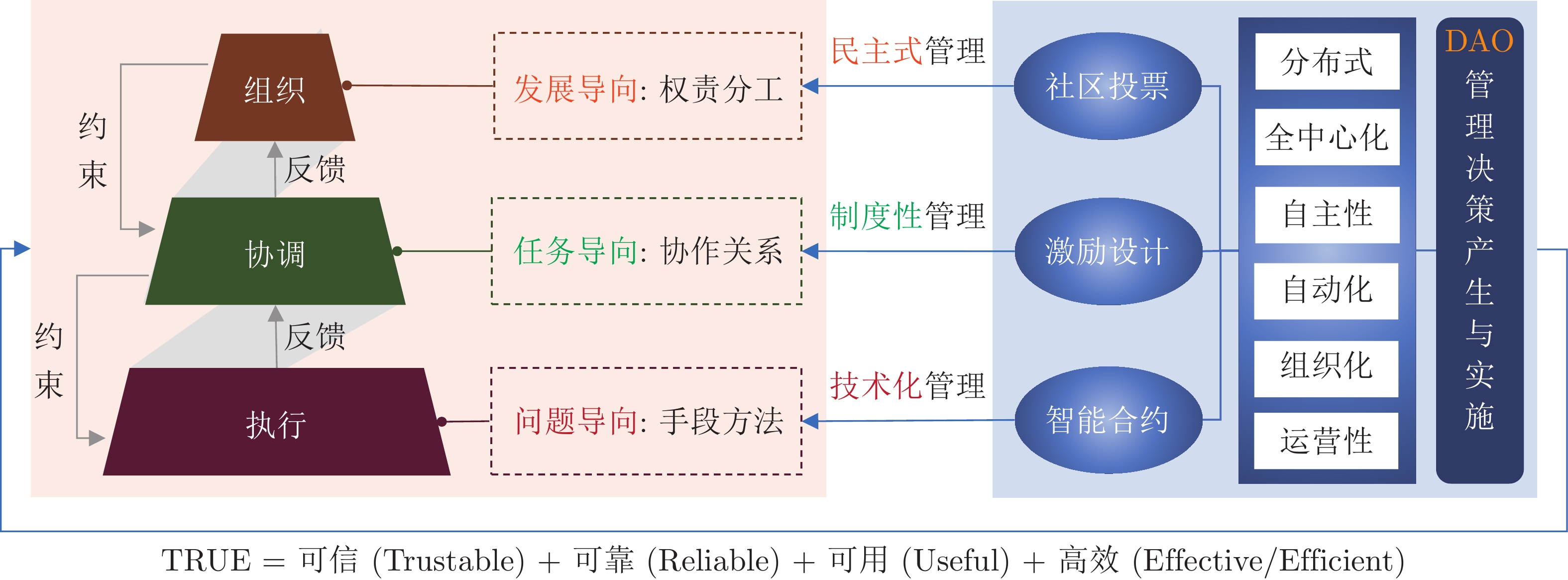
图 3 社会物理信息系统CPSS: 平行空间及真(TRUE)道(DAO)结构
Fig. 3 Cyber-Physical-Social Systems: Parallel spaces and TRUE DAO
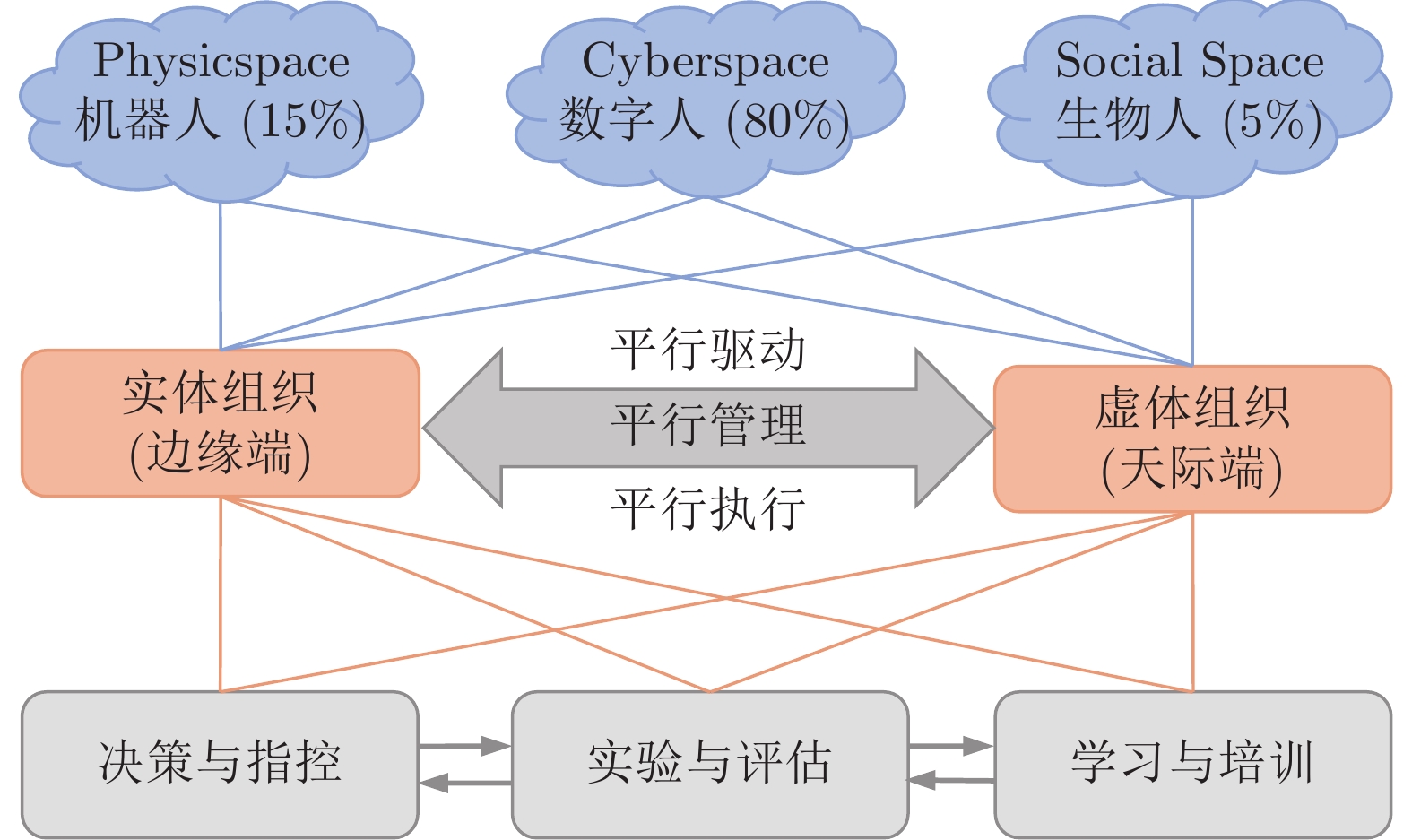
图 4 平行管理的基本框架、流程与功能模式
Fig. 4 Parallel management: Basic framework, processes and functionalities modes
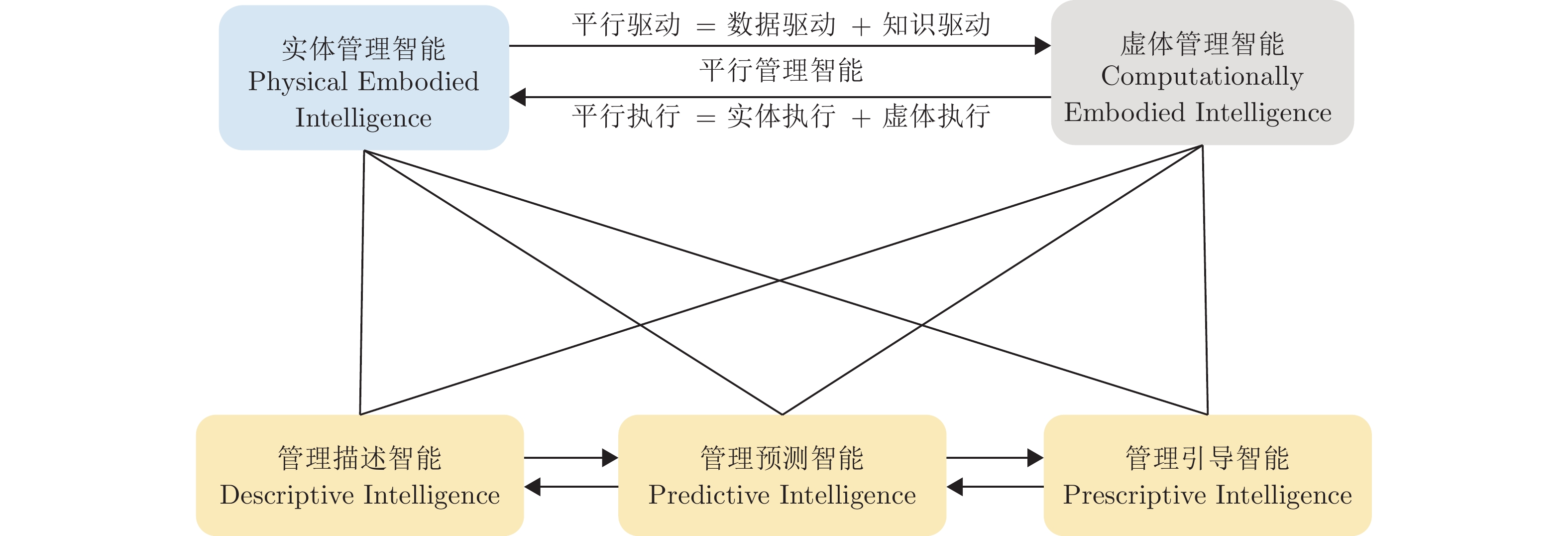
图 5 平行管理智能: 描述智能、预测智能、引导智能
Fig. 5 Parallel management intelligence: descriptive intelligence, predictive intelligence and prescriptive intelligence
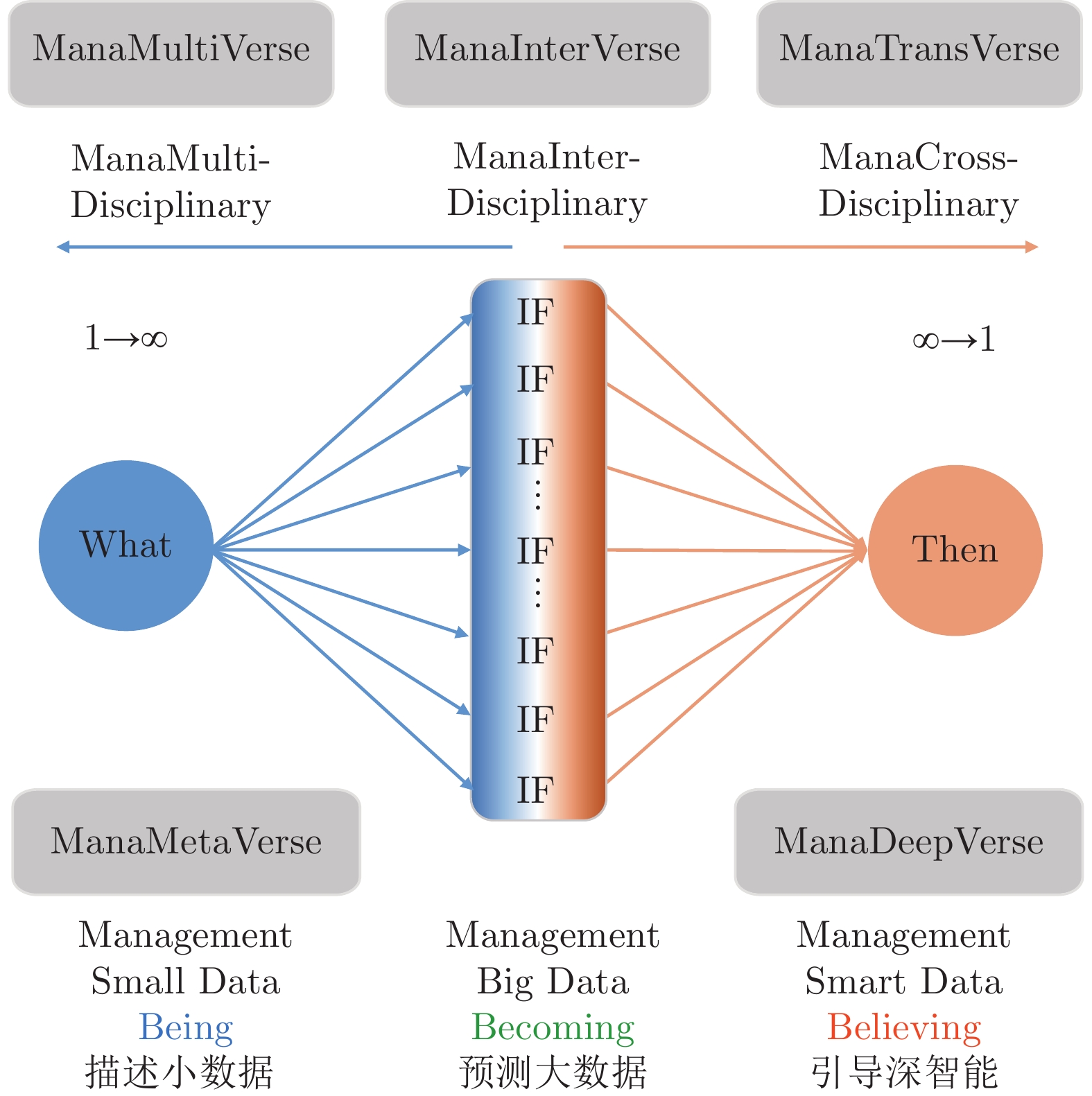
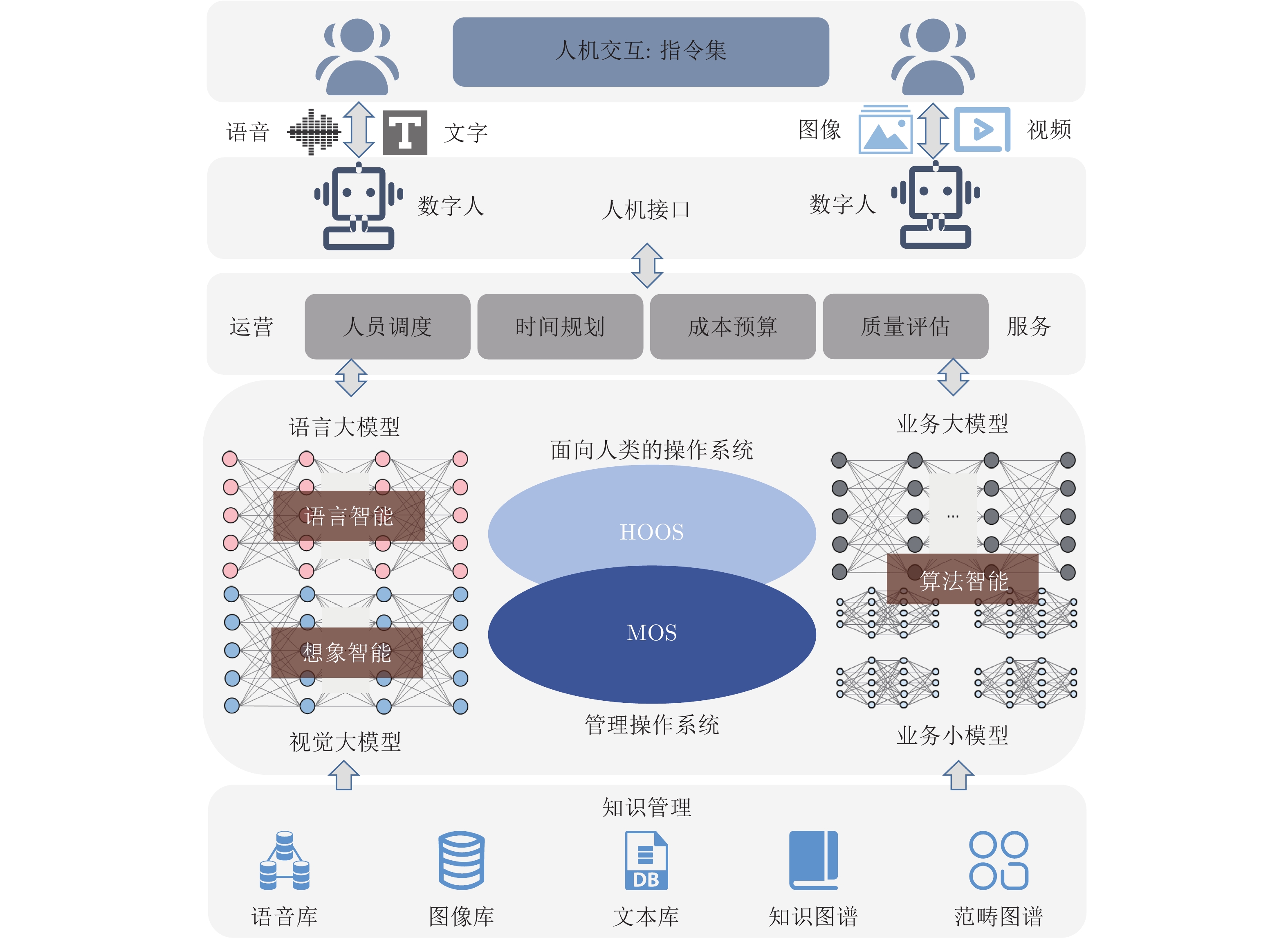
图 7 面向智业知识工作者的交叉科学基础
Fig. 7 Interdisciplinary science for knowledge workers in intelligent enterprises
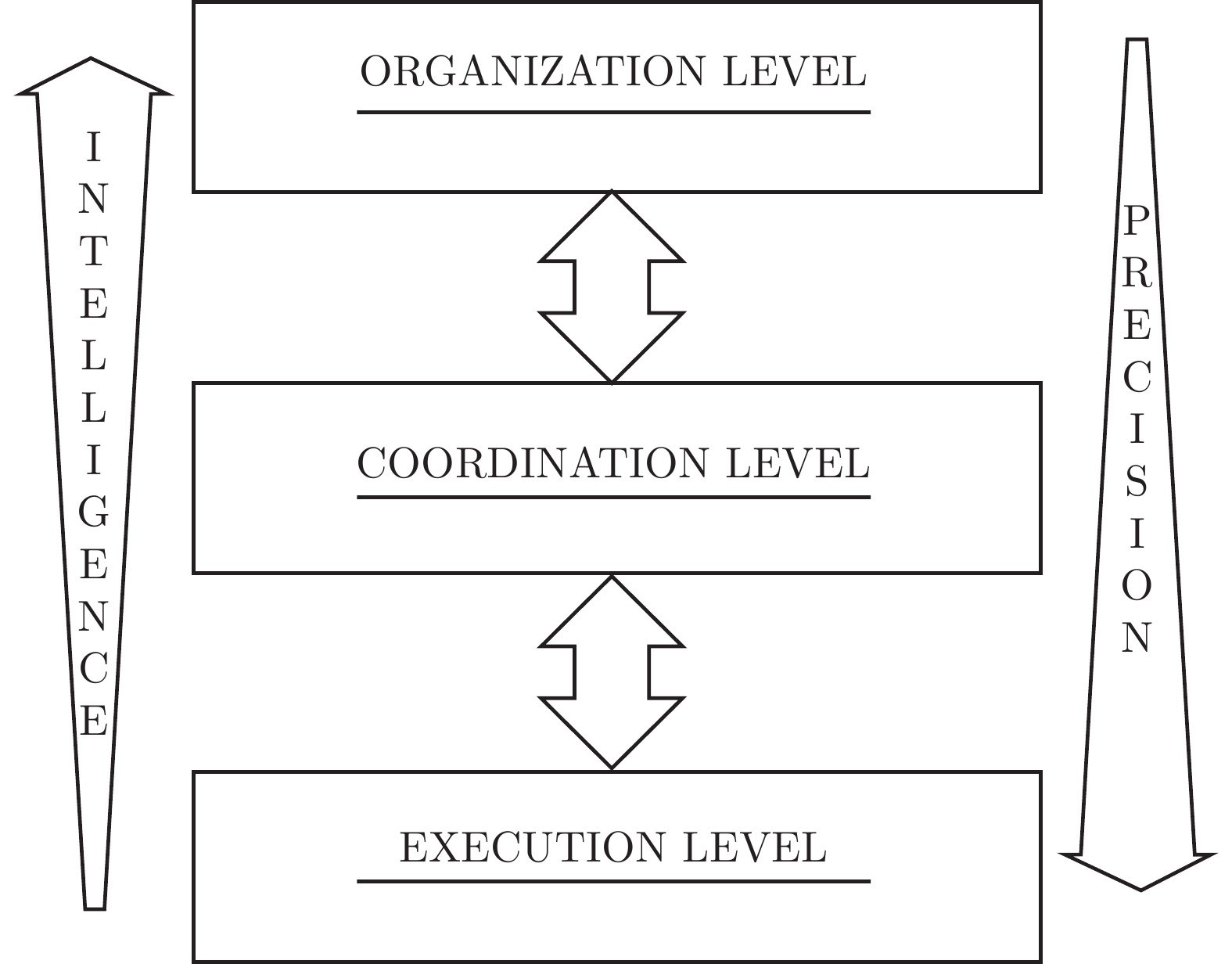
图 10 生态技术的起源: 智能控制的分层递阶结构和流程
Fig. 10 Origins of ecological technologies: Hierarchical progressive structures and processes for intelligent control

图 11 案例的计算化与智能化: 从管理的案例教学到管理的场景工程
Fig. 11 Computational management case studies: From case studies to scenarios engineering
-
[1] Russell B. The History of Western Philosophy. New York: Simon & Schuster, 1945. [2] Pollar H R. Development in Management Thoughts. William Heinemman, 1974. [3] Higgins J M. The Management Challenge: An Introduction to Management (Second edition). New York: Macmillan Publishing Company, 1994. [4] Pindur W, Rogers S E, Kim P S. The history of management: A global perspective. Journal of Management History, 1995, 1(1): 59-77 doi: 10.1108/13552529510082831 [5] Witzel M. A History of Management Thought (Second edition). New York: Routledge, 2016. [6] 郭沫若, 闻一多, 许维遹. 管子集校. 北京: 科学出版社, 1956.Guo Mo-Ruo, Wen Yi-Duo, Xu Wei-Yu. Proof of Guanzi. Beijing: Science Press, 1956. [7] Wang F Y. Guanzi and Complexity management, PARCS Technical Report, University of Arizona, USA, 1999. [8] Ferlie E, Lynn L E, Pollitt C. The Oxford Handbook of Public Management. Oxford: Oxford University Press, 2005. [9] 王飞跃. 《管子》与复杂性控制初探, 技术报告, 中国科学院智能控制与系统工程中心, 中国, 2001.Wang Fei-Yue. Guanzi and Complexity Control, Technical Report, Intelligent Control and Systems Engineering Center, CAS, China, 2001. [10] 王飞跃. 未来的管理, 财经界/管理学家, 管理与复杂性专栏, 中国, 2013.Wang Fei-Yue. Future Management, Finance/Management Scientist, Management and Complexity Column, China, 2013. [11] Crainer S. The Management Century: A Critical Review of 20th Century Thought and Practice. San Francisco: Jossey-Bass, 2000. [12] Wren D A, Bedeian A G, Breeze J D. The foundations of Henri Fayol’s administrative theory. Management Decision, 2002, 40(9): 906-918 doi: 10.1108/00251740210441108 [13] Pryor M G, Taneja S. Henri Fayol, practitioner and theoretician-revered and reviled. Journal of Management History, 2010, 16(4): 489-503 doi: 10.1108/17511341011073960 [14] Evans W R, Haden S S P, Clayton R W, et al. History-of-management-thought about social responsibility. Journal of Management History, 2013, 19(1): 8-32 doi: 10.1108/17511341311286150 [15] 王飞跃. 法约尔: 不能错位. 管理学家(学术版), 2013(8): 70-71Wang Fei-Yue. Fayol: Must not be misplaced. China Management Magazine, 2013(8): 70-71 [16] Taylor F W. The Principles of Scientific Management. New York: Harper and Brothers, 1911. [17] Peters T. Liberation Management: Necessary Disorganization for the Nanosecond Nineties. New York: Knopf, 1992. [18] 王飞跃. 平行管理系统: 概念与方法, 技术报告, 中国科学院复杂系统与智能科学重点实验室, 中国, 2005.Wang Fei-Yue. Parallel Management Systems: Concepts and Methods, Technical Report, Key Laboratory of Complex Systems and Intelligence Science, CAS, China, 2005. [19] Drucker P F. Knowledge-worker productivity: The biggest challenge. California Management Review, 1999, 41(2): 79-94 doi: 10.2307/41165987 [20] Drucker P F. Management Challenges for the 21st Century. New York: Harper Business, 1999. [21] Wang F Y. The DAO to DeEco and DeSoc with DeSci in metaverses: CPSS-based parallel economics with parallel intelligence. Journal Intelligent Science and Technology, 2021, 1(1): 3-13 [22] Weber M. The Theory of Social and Economic Organization. New York: Free Press, 1964. [23] Weber M. Economy and Society: An Outline of Interpretive Sociology. Berkeley: University of California Press, 1978. [24] Maslow A H. A theory of human motivation. Psychological Review, 1943, 50(4): 370-396 doi: 10.1037/h0054346 [25] Mayo E. The Social Problems of An Industrial Civilization. Boston: Harvard University, 1945. [26] Jaques E. The Changing Culture of A Factory. London: Tavistock, 1951. [27] Chandler A D. Strategy and Structure: Chapters in the History of the American Industrial Enterprise. Cambridge: MIT Press, 1962. [28] Revans P R. Action learning—a management development programme. Personnel Review, 1972, 1(4): 36-44 doi: 10.1108/eb055215 [29] Mintzberg H. The Nature of Managerial Work. New York: Harpercollins College Div, 1973. [30] Schumacher E F. Small is Beautiful. London: Blond & Briggs, 1973. [31] Perroux F. A New Concept of Development: Basic Tenets. London: Routledge, 1983. [32] Pascale R. Managing on the Edge. New York: Touchstone, 1991. [33] Mayo E. The Human Problems of An Industrial Civilization. London: Routledge, 2003. [34] Follet M P. Creative Experience. New York: Longmans, Green, 1924. [35] McGregor D. Theory X and theory Y. Organization Theory, 1960, 358(374): 5 [36] Reddin W J. Managerial Effectiveness. New York: McGraw-Hill, 1970. [37] Ouchi W G. Theory Z: How American Business Can Meet the Japanese Challenge. New York: Avon, 1982. [38] Maslow A. Z theory. Psichologija, 1993, 12: 104-121 [39] Hebb D O. The Organization of Behavior: A Neuropsychological Theory. New York: Psychology Press, 2002. [40] Simon H A. Administrative Behavior: A Study of Decision-Making Processes in Administrative Organizations (Fourth edition). New York: Free Press, 1997. [41] 格雷厄姆·阿利森, 菲利普·泽利科. 决策的本质: 解释古巴导弹危机. 第2版. 北京: 北京大学出版社, 2008.Allison G T, Zelikow P. Essence of Decision: Explaining the Cuban Missile Crisis (Second edition). Beijing: Peking University Press, 2008. [42] 钱学森, 许国志, 王寿云. 组织管理的技术——系统工程. 文汇报, 1978年9月27日Qian Xuesen, Xu Guozhi, Wang Shouyun. Technology of Organization and Management- Systems Engineering, Wen Wei Po Daily, Sep. 27, 1978. [43] 钱学森, 于景元, 戴汝为. 一个科学新领域——开放的复杂巨系统及其方法论. 自然杂志, 1990, 13(1): 3-10Qian Xuesen, Yu Jingyuan, Dai Ruwei. A New Field of Science: Open Complex Giant System and Its Methodology, Nature Magazine, 1990, 13(1): 3−10 [44] 钱学森. 一个科学新领域——开放的复杂巨系统及其方法论. 城市发展研究, 2005, 12(5): 1-8 doi: 10.3969/j.issn.1006-3862.2005.05.001Qian Xue-Sen. A new discipline of science——the study of open complex giant system and its methodology. Urban Studies, 2005, 12(5): 1-8 doi: 10.3969/j.issn.1006-3862.2005.05.001 [45] 徐绪松. 复杂科学管理. 北京: 科学出版社, 2010.Xu Xusong. Complex Scientific Management, Beijing: Science Press, 2010. [46] 王慧炯. 社会系统工程方法论. 北京: 中国发展出版社, 2015.Wang Hui-Jiong. Methodology of Social Systems Engineering. Beijing: China Development Press, 2015. [47] Wang F Y. An Organizational Framework and its Decision Processes for Hierarchical Intelligent Control Systems Using Category and Entropy, Technical Report, RAL#12-03-86, Robot Automation Laboratory, USA, 1986. [48] Wang F Y. Modeling and Specification of Complex Economic and Social Systems: Categories, Functors, and Natural Transformations, Technical Report, 05-99, University of Arizona, USA, 1999. [49] Fu M, Yeo C, Lin Y T, Wang F Y. WAVES: Web-based audio/video educational systems for real-time laboratory experiments. IFAC Proceedings Volumes, 2000, 33(31): 205-212 doi: 10.1016/S1474-6670(17)37864-3 [50] 王飞跃. 连通环境下联网系统的智能控制与管理问题. 模式识别与人工智能, 2004, 17(1): 1-6 doi: 10.3969/j.issn.1003-6059.2004.01.001Wang Fei-Yue. Intelligent control and management for networked systems in a connected world. Pattern Recognition and Artificial Intelligence, 2004, 17(1): 1-6 doi: 10.3969/j.issn.1003-6059.2004.01.001 [51] 王飞跃. 关于复杂系统的建模、分析、控制和管理. 复杂系统与复杂性科学, 2006, 3(2): 26-34Wang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2): 26-34 [52] 王飞跃. 从平行宇宙到平行管理系统PMS: ERP之后的量子力学方案? 财经界/管理学家, 2007, 10: 48-51 (查阅所有网上资料, 未找到本条文献信息, 请联系作者确认)Wang Fei-Yue. From parallel universes to parallel management systems PMS: A quantum mechanical scheme after ERP? Finance/Management Scientist, 2007, 10: 48-51 [53] 王飞跃. 平行应急管理系统PeMS的体系框架及其应用研究. 中国应急管理, 2007, 2(12): 22-27Wang Fei-Yue. The framework of parallel emergency management system PeMS and its application. China Emergency Management, 2007, 2(12): 22-27 [54] 王飞跃. 复杂经济社会系统分析与管理的一种新的数学框架, 技术报告, TR#08-17-2009, 中国科学院复杂系统与智能科学重点实验室, 中国, 2009.Wang Fei-Yue. Outline of A New Mathematics for Complex Economic and Management Systems, Technical Report, TR#08-17-2009, Key Laboratory of Complex Systems and Intelligence Science, CAS, China, 2009. [55] Wang F Y. Parallel economics: A new supply–demand philosophy via parallel organizations and parallel management. IEEE Transactions on Computational Social Systems, 2020, 7(4): 840-848 doi: 10.1109/TCSS.2020.3012747 [56] Wang F Y, Qin R, Li J J, Wang X, Qi H W, Jia X F, et al. Federated management: Toward federated services and federated security in federated ecology. IEEE Transactions on Computational Social Systems, 2021, 8(6): 1283-1290 doi: 10.1109/TCSS.2021.3125312 [57] Wang F Y, Qin R, Wang X, Hu B. MetaSocieties in metaverse: MetaEconomics and MetaManagement for MetaEnterprises and MetaCities. IEEE Transactions on Computational Social Systems, 2022, 9(1): 2-7 doi: 10.1109/TCSS.2022.3145165 [58] Drucker P F. Management: Tasks, Responsibilities, Practices. New York: HarperBusiness, 1993. [59] Devlin J, Chang M W, Lee K, Toutanova K. BERT: Pre-training of deep bidirectional transformers for language understanding. In: Proceedings of the 2019 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies. Minneapolis, USA: Association for Computational Linguistics, 2019. 4171−4186 [60] Brown T B, Mann B, Ryder N, Subbiah M, Kaplan J, Dhariwal P, et al. Language models are few-shot learners. In: Proceedings of the 34th International Conference on Neural Information Processing Systems. Vancouver, Canada: Curran Associates Inc., 2020. Article No. 159 [61] Riquelme C, Puigcerver J, Mustafa B, Neumann M, Jenatton R, Pinto A S, et al. Scaling vision with sparse mixture of experts. In: Proceedings of the 35th Neural Information Processing Systems (NIPS). Vancouver, Canada: Curran Associates, Inc., 2021. 8583−8595 [62] Dosovitskiy A, Beyer L, Kolesnikov A, Weissenborn D, Zhai X H, Unterthiner T, et al. An Image is worth 16x16 words: Transformers for image recognition at scale. In: Proceedings of the 9th International Conference on Learning Representations (ICLR). Austria: OpenReview.net, 2021. [63] Ramesh A, Pavlov M, Goh G, Gray S, Voss C, Radford A, et al. Zero-shot text-to-image generation. In: Proceedings of the 38th International Conference on Machine Learning (PMLR). PMLR, 2021. 8821−8831 [64] Poole B, Jain A, Barron J T, Mildenhall B. DreamFusion: Text-to-3D using 2D diffusion. arXiv preprint arXiv: 2209.14988, 2022. [65] Singer U, Polyak A, Hayes T, Yin X, An J, Zhang S Y, et al. Make-A-Video: Text-to-video generation without text-video data. arXiv preprint arXiv: 2209.14792, 2022. [66] Popper K. Three Worlds. The Tanner Lecture on Human Values. Ann Arbor: The University of Michigan, 1978. [67] Wang F Y. Parallel intelligence in metaverses: Welcome to Hanoi! IEEE Intelligent Systems, 2022, 37(1): 16-20 doi: 10.1109/MIS.2022.3154541 [68] Marshall A. Principles of Economics. London: Macmillan, 1890. [69] 陈龙, 王晓, 杨健健, 艾云峰, 田滨, 李宇宸, 等. 平行矿山: 从数字孪生到矿山智能. 自动化学报, 2021, 47(7): 1633-1645Chen Long, Wang Xiao, Yang Jian-Jian, Ai Yun-Feng, Tian Bin, Li Yu-Chen, et al. Parallel mining operating systems: From digital twins to mining intelligence. Acta Automatica Sinica, 2021, 47(7): 1633-1645 [70] 王飞跃. 平行驾驶与平行矿山: 智慧矿业的系统智能基础, 青岛智能产业技术研究院报告, 中国, 2017.Wang Fei-Yue. Parallel Driving and Parallel Mining: Systems Intelligence for Smart Mining Industries, QAII Technical Report, China, 2017. [71] 王拥军, 王飞跃, 王戈, 王晓, 王伊龙, 李瑞. 平行医院: 从医院信息管理系统到智慧医院操作系统. 自动化学报, 2021, 47(11): 2585-2599Wang Yong-Jun, Wang Fei-Yue, Wang Ge, Wang Xiao, Wang Yi-Long, Li Rui. Parallel hospitals: From hospital information system (HIS) to hospital smart operating system (HSOS). Acta Automatica Sinica, 2021, 47(11): 2585-2599 [72] 王飞跃. 数字医生与平行医疗: 从医疗知识自动化到系统化智能医学. 协和医学杂志, 2021, 12(6): 829-833Wang Fei-Yue. Digital doctors and parallel healthcare: From medical knowledge automation to intelligent metasystems medicine. Medical Journal of Peking Union Medical College Hospital, 2021, 12(6): 829-833 [73] DemanaQAII: 智慧管理决策与策略的大模型及其算法的设计、测试、评估和优化的分布式全中心自主工场, QAII技术报告, 青岛智能产业技术研究院, 中国, 2020.Wang F Y, Li J, Qin R, Ding W, Yuan Y, Wang X. DemanaQAII: A Foundation land for Design, Test, Evolution and Optimization of Management Policies and Decisions, QAII TechReport, China, 2020. [74] Stewart T A. Intellectual Capital: The New Wealth of Organization. New York: Doubleday/Currency, 1997. [75] J. W. Lu, X. X. Wang, X. Cheng, et al., Parallel Factories for Smart Industrial Operations: From Big AI models to Field Foundational Models and Scenarios Engineering, IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 12, pp. 2079-2086, 2022. [76] J. Yang, X. X. Wang, et al., Parallel Manufacturing for Industrial Metaverses: A New Paradigm in Smart Manufacturing, IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 12, pp. 2063-2070, 2022. [77] Y. Wang, Y. Tian, J. Wang, et al., “Integrated Inspection of QoM, QoP, and QoS for AOI Industries in Metaverses,” IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 12, pp. 2071–2078, 2022. [78] X. J. Wang, M. Z. Kang, H. Q. Sun, et al., DeCASA in AgriVerse: Parallel Agriculture for Smart Villages in Metaverses. IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 12, pp.2055-2062, 2022. [79] Y. Shen, Y. H. Liu, Y. L. Tian, et al., Parallel Sensing in Metaverses: Virtual-Real Interactive Smart Systems for “6S” Sensing. IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 12, pp. 2047-2054, 2022. [80] Wang F Y. The DAO to MetaControl for MetaSystems in metaverses: The system of parallel control systems for knowledge automation and control intelligence in CPSS. IEEE/CAA Journal of Automatica Sinica, 2022, 9(11): 1899-1908 doi: 10.1109/JAS.2022.106022 [81] Wang X, Yang J, Han J P, Wang W, Wang F Y. Metaverses and DeMetaverses: From digital twins in CPS to parallel intelligence in CPSS. IEEE Intelligent Systems, 2022, 37(4): 97-102 doi: 10.1109/MIS.2022.3196592 [82] Kante R M. The Change Masters. New York: Touchstone, Simon & Schuster, 1984. [83] Kanter R M. When Giants Learn to Dance: The Definitive Guide to Corporate Success. New York: Free Press, 1990. [84] Kanter R M. World Class: Thriving Locally in the Global Economy. New York: Simon & Schuster, 1995. [85] Wang F Y. Toward a paradigm shift in social computing: The ACP approach. IEEE Intelligent Systems, 2007, 22(5): 65-67 doi: 10.1109/MIS.2007.4338496 [86] Wang F Y, Carley K M, Zeng D, Mao W J. Social computing: From social informatics to social intelligence. IEEE Intelligent systems, 2007, 22(2): 79-83 doi: 10.1109/MIS.2007.41 [87] 王飞跃. 社会信号处理与分析的基本框架: 从社会传感网络到计算辩证解析方法. 中国科学: 信息科学, 2013, 43(12): 1598-1611 doi: 10.1360/N112013-00094Wang Fei-Yue. A framework for social signal processing and analysis: From social sensing networks to computational dialectical analytics. Scientia Sinica (Information), 2013, 43(12): 1598-1611 doi: 10.1360/N112013-00094 [88] Wang F Y, Filev D P, Pedrycz W, Li H Y, White C C. Guest editorial from intelligent control to smart management of cyber-physical-social systems: A celebration of 70th anniversary of cybernetics by Norbert Wiener. IEEE Transactions on Cybernetics, 2018, 48(12): 3278-3279 doi: 10.1109/TCYB.2018.2879213 [89] Wang F Y, Qin R, Li J J, Yuan Y, Wang X. Parallel societies: A computing perspective of social digital twins and virtual-real interactions. IEEE Transactions on Computational Social Systems, 2020, 7(1): 2-7 doi: 10.1109/TCSS.2020.2970305 [90] Wang F Y, Yuan Y, Wang X, Qin R. Societies 5.0: A new paradigm for computational social systems research. IEEE Transactions on Computational Social Systems, 2018, 5(1): 2-8 doi: 10.1109/TCSS.2018.2797598 [91] Wang F Y. Intelligent systems and social management. IEEE Intelligent Systems, 2011, 26(6): 2-3 doi: 10.1109/MIS.2011.103 [92] 王飞跃. 从敘述科学到叙述哲学: 王浩学术生涯的启示与意义, 哲学与科学论坛: 逻辑、数学与哲学——王浩诞辰百年纪念, 2021年12月12日.Wang Fei-Yue. From Narrative Sciences to Narrative Philosophy: The Meaning and Inspiration of Hao Wang’s Academic Caree, Philosophy and Science Forum: Logics, Mathematics and Philosophy, Dec. 12, 2012. [93] 王飞跃. 叙述管理: 从经典到展望和使命的社会技术可视化. 见: 第11届平行管理论坛. 青岛, 中国, 2020.Wang Fei-Yue. Narrative management: From classics to sociotechnical visualization of vision and mission. In: Proceedings of the 11th Symposium on Parallel Management. Qingdao, China, 2020. [94] 王飞跃. 系统工程与管理变革: 从牛顿到默顿的升华. 管理学家(实践版), 2013(10): 12-19Wang Fei-Yue. Systems engineering and management revolution: From Newton to Merton. Management Science (Practical Edition), 2013(10): 12-19 [95] Wang S, Ding W W, Li J J, Yuan Y, Ouyang L W, Wang F Y. Decentralized autonomous organizations: Concept, model, and applications. IEEE Transactions on Computational Social Systems, 2019, 6(5): 870-878 doi: 10.1109/TCSS.2019.2938190 [96] 丁文文, 王帅, 李娟娟, 袁勇, 欧阳丽炜, 王飞跃. 去中心化自治组织: 发展现状、分析框架与未来趋势. 智能科学与技术学报, 2019, 1(2): 202-213 doi: 10.11959/j.issn.2096-6652.201917Ding Wen-Wen, Wang Shuai, Li Juan-Juan, Yuan Yong, Ouyang Li-Wei, Wang Fei-Yue. Decentralized autonomous organizations: The state of the art, analysis framework and future trends. Chinese Journal of Intelligent Science and Technology, 2019, 1(2): 202-213 doi: 10.11959/j.issn.2096-6652.201917 [97] Qin R, Yuan Y, Wang F Y. Blockchain-Based knowledge automation for CPSS-oriented parallel management. IEEE Transactions on Computational Social Systems, 2020, 7(5): 1180-1188 doi: 10.1109/TCSS.2020.3023046 [98] Ding W W, Liang X L, Hou J C, Wang G, Yuan Y, Li J Q, et al. Parallel governance for decentralized autonomous organizations enabled by Blockchain and smart contracts. In: Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI). Beijing, China: IEEE, 2021. 1−4 [99] Wang F Y, Ding W W, Qin R, Hu B. Parallel philosophy for MetaOrganizations with MetaOperations: From Leibniz’s monad to HanoiDAO. IEEE Transactions on Computational Social Systems, 2022, 9(3): 658-666 doi: 10.1109/TCSS.2022.3172671 [100] Wang F Y, Ding W W, Wang X, Garibaldi J, Teng S Y, Imre R, et al. The DAO to DeSci: AI for free, fair, and responsibility sensitive sciences. IEEE Intelligent Systems, 2022, 37(2): 16-22 doi: 10.1109/MIS.2022.3167070 [101] Ding W W, Hou J C, Li J J, Guo C, Qin J R, Kozma R, et al. DeSci based on Web3 and DAO: A comprehensive overview and reference model. IEEE Transactions on Computational Social Systems, 2022, 9(5): 1563-1573 doi: 10.1109/TCSS.2022.3204745 [102] Wang F Y, Saridis G N. A coordination theory for intelligent machines. Automatica, 1990, 26(5): 833-844 doi: 10.1016/0005-1098(90)90001-X [103] Wang F Y. The engineering of intelligence: DAO to I&I, C&C, and V&V for intelligent systems. International Journal of Intelligent Control and Systems, 2021, 1(3): 1-5 [104] Cao D P, Wang X, Li L X, Lv C, Na X X, Xing Y, et al. Future directions of intelligent vehicles: Potentials, possibilities, and perspectives. IEEE Transactions on Intelligent Vehicles, 2022, 7(1): 7-10 doi: 10.1109/TIV.2022.3157049 [105] Li X, Ye P J, Li J J, Liu Z M, Cao L B, Wang F Y. From features engineering to scenarios engineering for trustworthy AI: I&I, C&C, and V&V. IEEE Intelligent Systems, 2022, 37(4): 18-26 doi: 10.1109/MIS.2022.3197950 [106] Herzberg F. One more time: How do you motivate employees? Harvard Business Review, 2003, 81(1): 87-96 [107] 王飞跃. 平行哲学: 智能产业与智慧经济的本源及其目标. 中国科学院院刊, 2021, 36(3): 308-318Wang Fei-Yue. Parallel philosophy: Origin and goal of intelligent industries and smart economics. Bulletin of Chinese Academy of Sciences, 2021, 36(3): 308-318 [108] 王飞跃. 平行哲学与智能科学: 从莱布尼茨的Monad到区块链之DAO. 模式识别与人工智能, 2020, 33(12): 1055-1065Wang Fei-Yue. Parallel philosophy and intelligent science: From Leibniz’s Monad to Blockchain’s DAO. Pattern Recognition and Artificial Intelligence, 2020, 33(12): 1055-1065 [109] 王飞跃. 平行哲学与智能技术: 平行产业与智慧社会的对偶方程与测试基础. 智能科学与技术学报, 2021, 3(3): 245-255 doi: 10.11959/j.issn.2096-6652.202126Wang Fei-Yue. Parallel philosophy and intelligent technology: Dual equations and testing systems for parallel industries and smart societies. Chinese Journal of Intelligent Science and Technology, 2021, 3(3): 245-255 doi: 10.11959/j.issn.2096-6652.202126 [110] Wang F Y. Blockchain intelligence: Cornerstone of the future smart economy and smart societies. In: Proceedings of the 2nd World Intelligent Congress. 2018. [111] 李娟娟, 袁勇, 王飞跃. 基于区块链的数字货币发展现状与展望. 自动化学报, 2021, 47(4): 715-729 doi: 10.16383/j.aas.c210018Li Juan-Juan, Yuan Yong, Wang Fei-Yue. Blockchain-based digital currency: The state of the art and future trends. Acta Automatica Sinica, 2021, 47(4): 715-729 doi: 10.16383/j.aas.c210018 [112] Li J J, Yuan Y, Wang F Y. A novel GSP auction mechanism for ranking Bitcoin transactions in blockchain mining. Decision Support Systems, 2019, 124: Article No. 113094 doi: 10.1016/j.dss.2019.113094 [113] Li J J, Ni X C, Yuan Y, Wang F Y. A novel GSP auction mechanism for dynamic confirmation games on Bitcoin transactions. IEEE Transactions on Services Computing, 2022, 15(3): 1436-1447 doi: 10.1109/TSC.2020.2994582 [114] Li J J, Yuan Y, Wang F Y. Analyzing Bitcoin transaction fees using a queueing game model. Electronic Commerce Research, 2022, 22(1): 135-155 doi: 10.1007/s10660-020-09414-3 [115] 欧阳丽炜, 王帅, 袁勇, 倪晓春, 王飞跃. 智能合约: 架构及进展. 自动化学报, 2019, 45(3): 445-457Ouyang Li-Wei, Wang Shuai, Yuan Yong, Ni Xiaochun, Wang Fei-Yue. Smart contracts: Architecture and research progresses. Acta Automatica Sinica, 2019, 45(3): 445-457 [116] Wang S, Ouyang L W, Yuan Y, Ni X C, Han X, Wang F Y. Blockchain-enabled smart contracts: Architecture, applications, and future trends. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(11): 2266-2277 doi: 10.1109/TSMC.2019.2895123 [117] Bennis W, Biederman P W. Organizing Genius: The Secrets of Creative Collaboration. Reading: Basic Books, 1998. [118] Wang F Y. Building robots for parallel cognition: Cognitive science in reflection and perspective. In: Proceedings of the 3rd International Conference on Cognitive Systems and Information Processing (ICCSIP). Beijing, China, 2018. [119] Wang F Y. Parallel cognition: Towards the integration of knowledge and behavior in intelligent cognitive science and technology. In: Proceedings of the 1st China Symposium on Cognitive computing and Hybrid Intelligence. Xi’an, China, 2018. [120] Ye P J, Wang F Y. Parallel population and parallel human—a cyber-physical social approach. IEEE Intelligent Systems, 2022, 37(5): 19-27 [121] Ye P J, Wang X, Zheng W B, Wei Q L, Wang F Y. Parallel cognition: Hybrid intelligence for human-machine interaction and management. Frontiers of Information Technology & Electronic Engineering, to be published [122] Ye P J, Zhu F H, Sabri S, Wang F Y. Consistent population synthesis with multi-social relationships based on Tensor decomposition. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(5): 2180-2189 doi: 10.1109/TITS.2019.2916867 [123] Ye P J, Wang X, Xiong G, Chen S C, Wang F Y. TiDEC: A two-layered integrated decision cycle for population evolution. IEEE Transactions on Cybernetics, 2021, 51(12): 5897-5906 doi: 10.1109/TCYB.2019.2957574 -

 下载:
下载:


计量
- 文章访问数: 5774
- HTML全文浏览量: 4917
- PDF下载量: 5340
- 被引次数: 0
