

Estimation of Human Limb Motion Based on Progressive Unscented Kalman Filter Network
-
摘要: 针对基于表面肌电信号 (Surface electromyography, sEMG) 的人体肢体运动估计建模困难的问题, 提出一种渐进无迹卡尔曼滤波网络 (Progressive unscented Kalman filter network, PUKF-net), 来实现降低肢体运动与sEMG量测的建模难度以及提高肢体运动估计精度的目的. 首先, 设计深度神经网络从sEMG数据中学习肢体运动状态与sEMG量测之间的映射关系和噪声统计特性. 其次, 采用渐进量测更新方法对先验状态估计进行修正, 减小运动估计的线性化误差, 提高PUKF-net模型的稳定性. 通过结合深度神经网络和渐进卡尔曼滤波的优势, 使得PUKF-net具有良好的模型适应性和抗噪能力. 最后, 设计基于sEMG的人体肢体运动估计实验, 验证了PUKF-net模型的有效性. 相较于长短期记忆网络 (Long short-term memory, LSTM) 和其他卡尔曼滤波网络, PUKF-net在肢体运动估计中的均方根误差 (Root mean square error, RMSE) 下降了14.9%, 相关系数R2提高了5.1%.Abstract: To solve the difficult modeling problem of human limb motion estimation based on surface electromyography (sEMG), a progressive unscented Kalman filter network (PUKF-net) is proposed to reduce the difficulty of modeling limb motion and sEMG measurements and improve the accuracy of limb motion estimation. Firstly, a deep neural network is designed to learn the mapping relationship between limb motion states and sEMG measurements and the statistical property of noise from sEMG data. Secondly, a progressive measurement update method is used to correct the priori state estimate for reducing the linearization error of motion estimation and improving the stability of the PUKF-net. By combining the advantages of deep neural network and progressive Kalman filter, the PUKF-net has good model adaptability and anti-noise capability. Finally, a human limb motion estimation experiment based on sEMG is designed to verify the validity of the PUKF-net. Compared with the long short-term memory (LSTM) and other Kalman filter network models, the root mean square error (RMSE) of PUKF-net in limb motion estimation has decreased by 14.9% and the correlation coefficient R2 has increased by 5.1%.
-
表面肌电信号 (Surface electromyography, sEMG) 是动作电位沿着肌纤维方向传播引起的生物电信号, 可用于反映人体肌肉收缩、关节力矩等运动信息[1]. 由于非侵入、测量技术相对成熟等特点, sEMG被广泛用于估计人体的运动状态和运动意图[2], 在人机协作、智能假肢、康复医疗和运动评估等领域有重要的应用价值[3-5].
基于sEMG的人体运动估计中的重要问题之一, 即如何建立sEMG与人体运动之间的映射模型. 其中, 生理学建模是一种常用的方法, 该方法从运动生理学和生物力学出发, 将sEMG转换为动力, 并依据关节动力学得出人体运动信息[6]. 生理学模型符合运动生理规律且具有较好的可解释性, 但计算复杂且涉及大量不易测量的生理参数, 限制了该类模型的应用[7]. 近年来, 随着深度学习技术的迅速发展, 深度神经网络逐渐成为人体运动估计领域中应用最为广泛的方法[8-14]. 在基于sEMG的人体运动估计中, 深度学习模型设计的核心在于如何利用深度神经网络从sEMG数据中学习出sEMG与人体运动之间的映射关系. Lu等[15]提出了一种堆叠卷积长短期记忆网络(Stacked convolutional and long-short term memory networks, Conv-LSTM)用于人体下肢关节角度估计. Chai等[16]结合长短期记忆网络 (Long short-term memory, LSTM) 和离散时间归零神经算法的闭环控制模型来实现人体上肢运动意图的准确估计. 尽管这类方法取得了较好的准确性, 但深度神经网络作为一种 “黑箱” 模型含有大量不可见状态且可解释性欠缺, 限制了其估计性能的进一步提升[17].
基于卡尔曼滤波的状态估计方法通过显式描述表示系统状态的转换关系, 具有良好的噪声处理能力. 为处理深度神经网络含有噪声的估计输出[18-21], Zhang等[18]设计LSTM-UKF算法, 利用LSTM网络提供量测预测值, 解决量测缺失引起的误差增大问题. Jondhale等[19]利用无迹卡尔曼滤波 (Unscented Kalman filter, UKF) 进一步提高广义回归神经网络的估计精度. Lim等[20]提出利用TCN (Temporal convolutional network) 将各类信号合成后辅助UKF进行状态估计的方法. 然而, 卡尔曼滤波方法的应用需要大量先验知识来设计人体运动模型和调整参数, 尤其是肌肉运动引起的sEMG与人体运动状态之间物理关系涉及大量复杂转换以及大量难以测量的生理学参数. 同时, sEMG噪声的复杂性和人体运动的随机性又增加了人体运动估计的建模难度. 为了克服这些限制, 已有学者尝试将卡尔曼滤波与神经网络相结合, 从测量数据中使用神经网络来学习卡尔曼滤波参数[17, 22-25]. Coskun等[22]提出了LSTM-KF (LSTM-based Kalman filter process), 用于处理任意黑盒估计器输出的含有噪声的人体姿态估计, 通过三个LSTM模块分别学习卡尔曼滤波的状态模型、观测模型以及噪声模型. Bao等[23]提出了深度卡尔曼滤波网络(Deep Kalman filter network, DKFN), 利用卷积神经网络 (Convolutional neural network, CNN) 提取sEMG高维特征后输入LSTM-KF, DKFN在LSTM-KF的基础上, 增加了一个LSTM模块用于学习卡尔曼增益. Zhao等[24]提出学习卡尔曼网络 (Learning Kalman network, LKN), 由全连接层学习其状态模型和量测模型参数, 由LSTM模块学习得到卡尔曼增益. 这种结合深度神经网络的卡尔曼滤波方法称作卡尔曼滤波网络 (Kalman filter network, KFN). 通过结合深度学习与卡尔曼滤波的优势, KFN具有较好的模型适应性和抗噪能力. 然而, 非线性的深度神经网络使得滤波过程中引入较大的线性化误差, 影响了KFN的估计精度和系统的稳定性[26-27], 因此目前与卡尔曼滤波结合的神经网络结构较简单. 由于结构限制, KFN的估计能力有限, 通常在其他估计模型之后用于进一步处理含有噪声的状态估计或高阶特征[22-24].
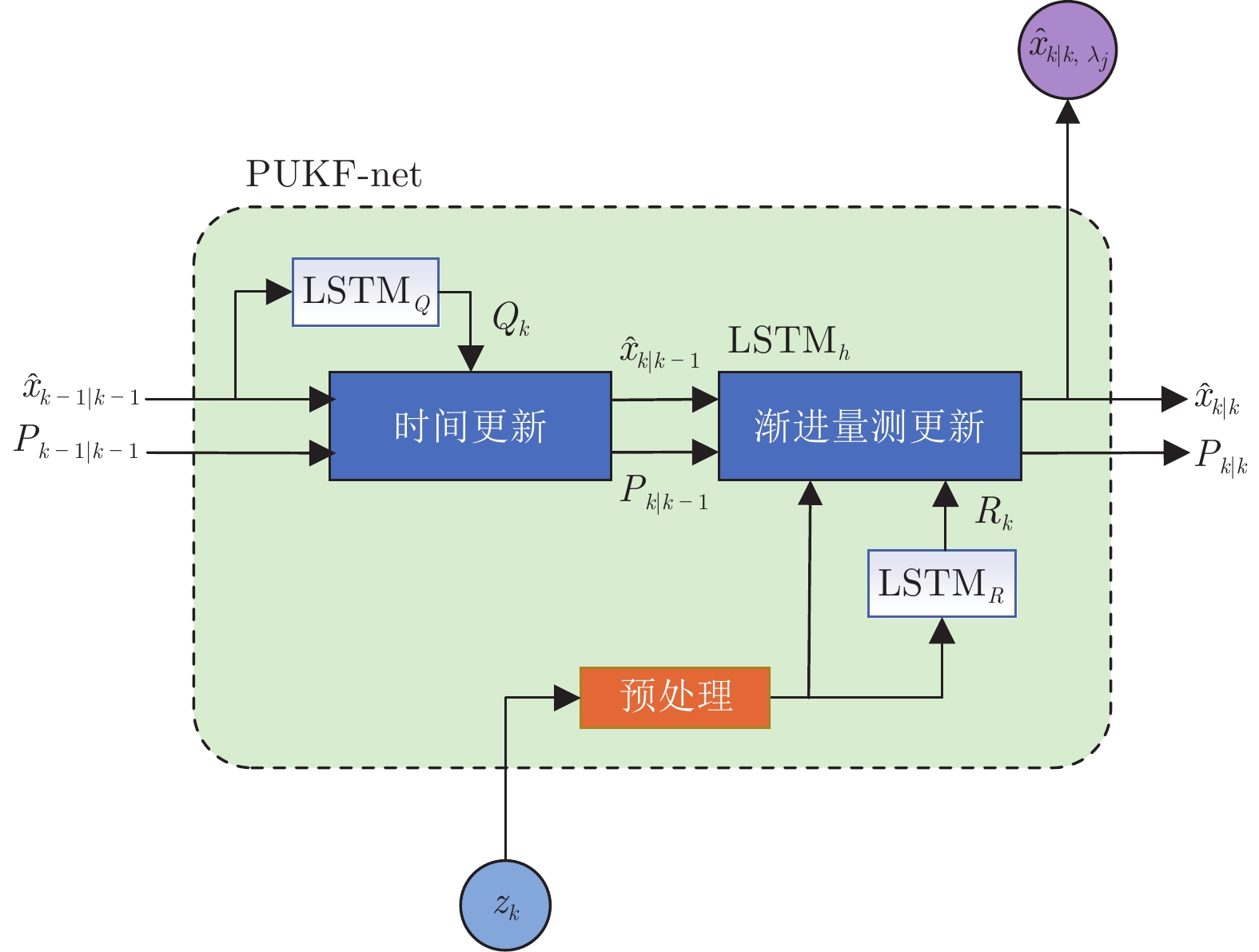
针对以上问题, 本文提出了一种渐进无迹卡尔曼滤波网络 (Progressive unscented Kalman filter network, PUKF-net) 端到端地实现基于sEMG的人体运动状态估计, 其结构如图1所示. 首先, 根据人体运动过程建立非线性状态转移模型和量测模型, 设计了三个LSTM模块直接从sEMG数据中学习人体运动状态与sEMG量测的映射关系, 以及模型的噪声统计特性; 其次, 利用UT (Unscented transformation)变换和渐进量测更新方法减小线性化误差, 提高PUKF-net模型的稳定性; 最后, 通过实验采集肢体运动过程关节角度变化和相关肢体sEMG, 验证了PUKF-net模型的有效性和优越性.
1. 问题描述
sEMG是一种反映肌群潜在变化的表征方式, 其有效信号频带范围为10 ~ 500 Hz, 信号幅度一般为0 ~ 5 mV. 基于sEMG的人体肢体运动状态估计的主要难点在于: 1) 人体运动涉及多块肌肉活动, sEMG信号实际上是多层次肌肉活动引起的动作电位在皮肤表面叠加的结果; 2) 由于sEMG的非平稳、微弱等特性, 同时受体内电解质水平等生理因素以及外部环境因素干扰[28], sEMG信号通常包含大量复杂的观测噪声. 因此, 传统解析的方法难以精确描述肌肉运动引起的sEMG与肢体姿态之间的转换关系. 特别地, 肢体运动的随机性又增加了人体运动的建模难度. 以人体上肢运动为例
$$ x_k = f(x_{k-1})+w_{k} $$ (1) 其中, $ x_{k}\in {\bf{R}}^{n} $表示$ k $时刻$ n $维上肢关节状态向量, $ {{w}_{k}} $表示$ k $时刻系统噪声, $ f\left( \cdot \right) $表示系统状态转移函数. 上肢运动状态的初始估计满足
$$ \left\{\begin{aligned} & {{\hat{x}}_{0|0}} = \text{E}\left( {{{x}}_{0}} \right) \\ & {{{P}}_{0|0}} = \text{E}\left( \left( x_0-\hat x_{0|0} \right){\left( x_{0}-\hat{x}_{0|0} \right)}^\text{T} \right) \end{aligned}\right. $$ (2) 其中, $ {{\hat{x}}_{0|0}} $和$ {{{P}}_{0|0}} $表示初始状态估计及其方差. 考虑到sEMG与上肢关节角度之间的复杂映射关系, 设计LSTM模块直接从sEMG中学习系统的非线性量测函数, $ {z}_{k}\in {\bf{R}}^{m} $表示$ m $维的sEMG量测向量, $ {{v}_{k}} $表示$ k $时刻的量测噪声, 系统的量测模型表示如下
$$ z_k = \text{LSTM}_{h}\left( {{x}_{k}} \right)+{{v}_{k}} $$ (3) 其中, $ \text{LSTM}_{h} $表示用于学习量测函数的LSTM模型, 过程噪声$ {{w}_{k}} $和量测噪声$ {{v}_{k}} $分别是均值为零、协方差为$ {{Q}_{k}} $和$ {{R}_{k}} $的互不相关的高斯白噪声
$$ \begin{align} w_{k}\sim\ \text{N} \left( {\bf{0}}, Q_{k} \right) \end{align} $$ (4) $$ \begin{align} v_{k}\sim\ \text{N} \left( {\bf{0}}, R_{k} \right) \end{align} $$ (5) 其中, $ {{Q}_{k}} $和$ {{R}_{k}} $分别表示$ k $时刻过程噪声$ {{w}_{k}} $和量测噪声$ {{v}_{k}} $的协方差. 针对肢体运动的随机性和sEMG量测噪声的复杂性, 利用LSTM模块从系统状态和sEMG测量中学习当前时刻的$ {{Q}_{k}} $和$ {{R}_{k}} $
$$ \begin{align} Q_{k}& = \text{LSTM}_{Q}\left( x_{k-1}, c_{k-1}^{Q} \right) \end{align} $$ (6) $$ \begin{align} R_{k}& = \text{LSTM}_{R}\left( z_{k}, c_{k-1}^{R} \right) \end{align} $$ (7) 其中, $ \text{LSTM}_{Q} $和$ \text{LSTM}_{R} $表示用于学习过程噪声和量测噪声统计特性的LSTM模块, $ c_{k-1}^{Q} $和$ c_{k-1}^{R} $是上一时刻$ \text{LSTM}_{Q} $和$ \text{LSTM}_{R} $输出的隐藏单元, 由其对应的LSTM模块得到[22]
$$ \begin{align} {{{f}}_{k}}& = \sigma ( {{{W}}_{fh}}{{{h}}_{k-1}}+{{{W}}_{fx}}{{{x}}_{k}}+{{{b}}_{f}} ) \end{align} $$ (8) $$ \begin{align} {{{i}}_{k}}& = \sigma \left( {{{W}}_{ih}}{{{h}}_{tk-1}}+{{{W}}_{ix}}{{{x}}_{k}}+{{{b}}_{i}} \right) \end{align} $$ (9) $$ \begin{align} {{{o}}_{k}}& = \sigma \left( {{{W}}_{oh}}{{{h}}_{k-1}}+{{{W}}_{ox}}{{{x}}_{k}}+{{{b}}_{o}} \right) \end{align} $$ (10) $$ \begin{align} {{\widetilde{{c}}}_{k}}& = \tanh \left( {{{W}}_{ch}}{{{h}}_{k-1}}+{{{W}}_{cx}}{{{x}}_{k}}+{{{b}}_{c}} \right) \end{align} $$ (11) $$ \begin{align} {{{c}}_{k}}& = {{{f}}_{k}}{{{c}}_{k-1}}+{{{i}}_{k}}{{\widetilde{{c}}}_{k}} \end{align} $$ (12) $$ \begin{align} {{{h}}_{k}}& = {{{o}}_{k}}\tanh \left( {{{c}}_{k}} \right) \end{align} $$ (13) 其中, $ \sigma ( \cdot ) $表示Sigmod函数, $ x_k $表示$ k $时刻输入, $ h_{k-1} $表示上一时刻LSTM隐藏单元输出, 通过计算遗忘门$ f_k $, 输入门$ i_k $, 输出门$ o_k $以及记忆单元$ c_k $, 最终输出隐藏状态$ h_k $. $ W_\# $表示门控单元权重, $ b_\# $表示门控单元偏置.
所设计的PUKF-net内部结构如图1所示. 该模型将基于sEMG的肢体运动估计任务拆分成三个LSTM模块. 其中, $ \text{LSTM}_{Q} $和$ \text{LSTM}_{R} $分别用于从sEMG数据中学习噪声协方差矩阵$ Q_k $和$ R_k $, $ \text{LSTM}_h $模块用于学习人体运动状态与sEMG之间的映射关系. 特别地, 在量测更新过程中采用渐进量测更新方式来提高系统估计的稳定性. 最后, 在损失函数中增加了偏差项以提高PUKF-net训练效率.
2. 运动估计方法
2.1 时间更新
根据$ k $时刻输入的sEMG, 通过PUKF-net估计当前人体上肢运动状态$ {x}_{k} $. 首先, 根据上一时刻运动状态$ {{x}_{k-1}} $和当前时刻的量测$ {{z}_{k}} $学习噪声统计特性$ {{Q}_{k}} $和$ {{R}_{k}} $. $ \text{LSTM}_{Q} $和$ \text{LSTM}_{R} $内部结构如图2所示. 对$ \text{LSTM}_{Q} $和$ \text{LSTM}_{R} $模块的输出取幂使得$ {{Q}_{k}} $和$ {{R}_{k}} $为正定矩阵. $ k $时刻$ n $维状态$ {{x}_{k}} $的均值和协方差用$ 2n+1 $个传播点近似表示
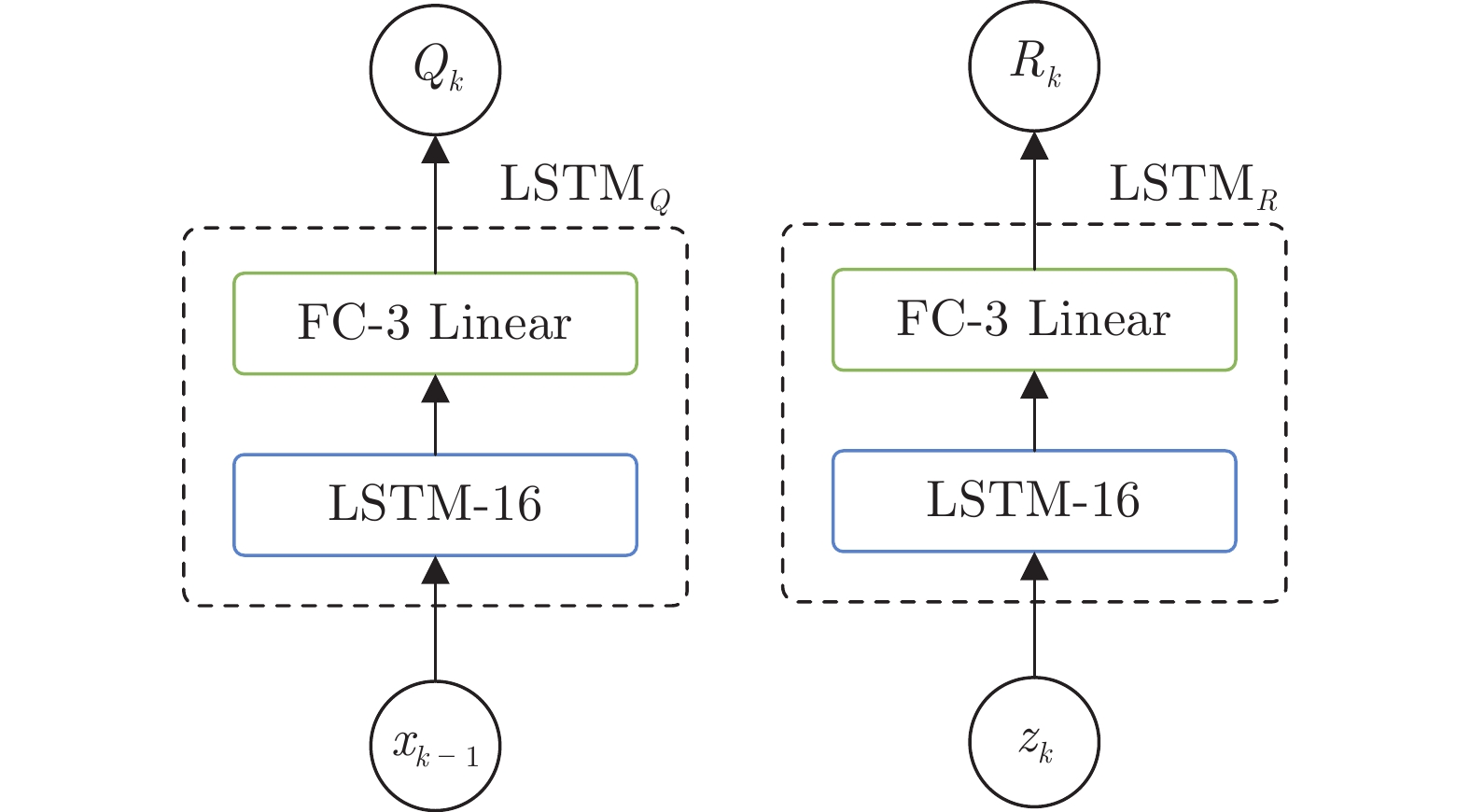 图 2 $ \text{LSTM}_Q$, $ \text{LSTM}_R$网络结构Fig. 2 Network structure of $ \text{LSTM}_Q$ and $ \text{LSTM}_R$
图 2 $ \text{LSTM}_Q$, $ \text{LSTM}_R$网络结构Fig. 2 Network structure of $ \text{LSTM}_Q$ and $ \text{LSTM}_R$$$ \left\{\begin{aligned} &\chi _{k-1|k-1}^{i} = {{\hat{x}}_{k-1|k-1}}, i = 0 \\ &\chi _{k-1|k-1}^{i} = {{\hat{x}}_{k-1|k-1}}+{{\left( \sqrt{(n+\kappa ){{P}_{k-1|k-1}}}\right)}_{i}}, \\ & i = 1, 2, \cdots , n\\ &\chi _{k-1|k-1}^{i} = {{\hat{x}}_{k-1|k-1}}-{{\left( \sqrt{(n+\kappa ){{P}_{k-1|k-1}}}\right)}_{i}}, \\ & i = n+1, \cdots , 2n \end{aligned}\right. $$ (14) 其中, $ {{\hat{x}}_{k-1|k-1}} $和$ {{P}_{k-1|k-1}} $是系统$ k-1 $时刻的状态估计及其协方差, $ n $表示系统状态$ x $的维度, $ \kappa $是系统状态$ x $的Sigma传播点间距比例因子. 通过调节比例因子$ \kappa $的取值大小, 决定Sigma传播点之间的距离和其比重的大小, 从而调整采样点所描述非线性状态函数后验分布的统计特性. 在满足高斯分布假设的条件下, 为使得UKF对称采样获取的后验分布效果最好, $ n+\kappa = 3 $被选择[29]. 根据系统状态模型, 由采样点集$\{ {{\chi }^{i}_{k-1|k-1}} \}, i = 0, 1, \cdots , 2n $可得状态预测的传播点
$$ X_{k|k-1}^{i} = f\left( \chi _{k-1|k-1}^{i} \right), i = 0, 1, \cdots , 2n $$ (15) 预测状态及其协方差表示如下
$$ \begin{align} &{\hat{x}_{k|k-1}} = \sum\limits_{i = 0}^{2n}{W_{i}^{m}X_{k|k-1}^{i}} \end{align} $$ (16) $$ \begin{split} {{P}_{k|k-1}} =\;& \underset{i = 0}{\overset{2n}{\mathop \sum }} W_{i}^{c}\left( X _{k|k-1}^{i}-{\hat{x}_{k|k-1}} \right)\times\\ &{{\left( X _{k|k-1}^{i}-{\hat{x}_{k|k-1}} \right)}^{\text{T}}}+{{Q}_{k}} \end{split} $$ (17) 其中, $ {{Q}_{k}} $是由$ \text{LSTM}_{Q} $模块得到的系统噪声协方差, 均值权重$ W_{i}^{m} $和方差权重$ W_{i}^{c} $取值如下
$$ W_{i}^{m} = W_{i}^{c} = \left\{\begin{aligned} &\frac{\kappa} {n+\kappa }, & i = 0 \qquad\qquad\;\;\;\\ &\frac{1}{2\left( n+\kappa \right)}, & i = 1, 2, \cdots , 2n \end{aligned}\right. $$ (18) 2.2 渐进量测更新方法
由于人体肢体运动与sEMG之间的非线性映射关系复杂, 且肢体运动估计器的稳定性不足, 将采用渐进量测更新方法[30-31]来修正人体肢体的运动估计. 根据非线性卡尔曼滤波稳定性分析, 不难发现人为增大测量噪声的协方差有助于提高估计器的稳定性[30]. 将量测更新分解成$ N $步, 同时每次渐进量测更新时测量噪声协方差被人为放大$ {1}/{\Delta }_{j} $倍, $ {\Delta }_{j} $表示第$ j $步的迭代步长[31-32]. 令渐进更新的伪时间点为$ {\lambda }_{j}\in \left[ 0, 1 \right], j = 0, 1, \cdots, N $, 第$ j $步的伪时间点$ {\lambda}_{j} = {{\lambda}_{j-1}}{+}{\Delta}_{j} $, 且满足$ {\lambda}_{0} = 0 $和$ {\lambda}_{N} = 1 $. 根据状态预测中得到的$ \hat{x}_{k|k-1} $和$ {P}_{k|k-1} $, 令 $ {{{\hat{x}}}_{k|k, {{\lambda }_{0}}}} = {{{\hat{x}}}_{k|k-1}}, {{P}_{k|k, {{\lambda }_{0}}}} = {{P}_{k|k-1}} $, 可得伪时间$ {{\lambda}_{j}} $, 传播点集$ \{ \chi _{k|k, {{\lambda }_{j-1}}}^{i} \}, i = 1, 2, \cdots , 2n $经过量测模型$ \text{LSTM}_h $传递可得量测预测的传播点及其均值
$$ Z_{k|k, {{\lambda }_{j}}}^{i} = \text{LST}{{\text{M}}_{h}}\left( \chi _{k|k, {{\lambda }_{j-1}}}^{i} \right)\\ $$ (19) $$ {\hat z_{k|k,{\lambda _j}}} = \mathop {\mathop \sum \limits^{2n} }\limits_{i = 0} W_i^mZ_{k|k,{\lambda _j}}^i $$ (20) 其中, 预测状态估计的传播点表示如下
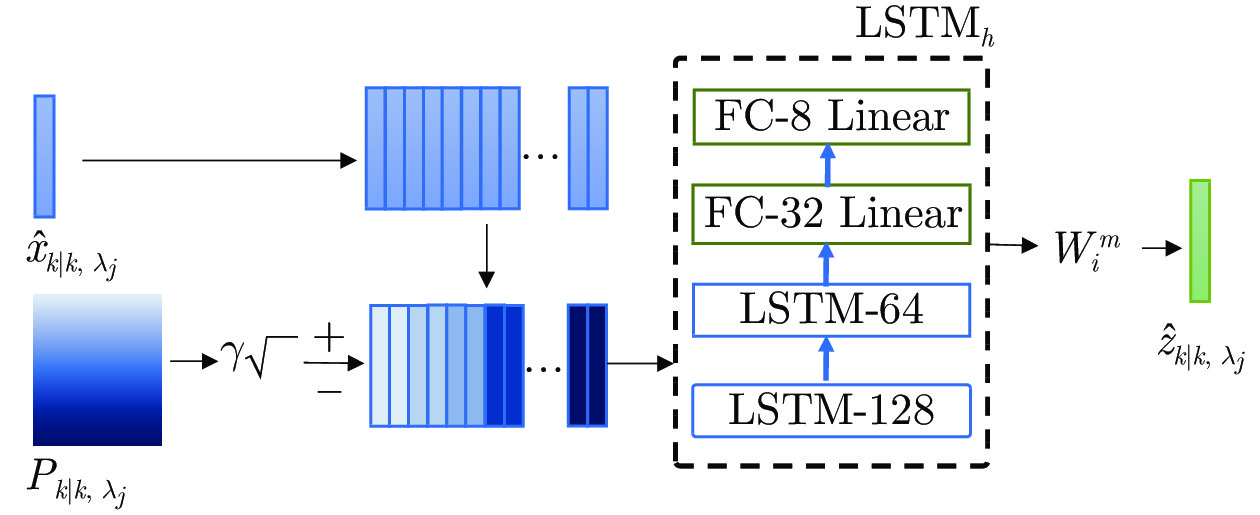
$$ \left\{\begin{aligned} & \chi _{k|k, {{\lambda }_{j-1}}}^{i} = {\hat{x}_{k|k, {{\lambda }_{j-1}}}}, i = 0 \\ & \chi _{k|k, {{\lambda }_{j-1}}}^{i} = {\hat{x}_{k|k, {{\lambda }_{j-1}}}}+{{\left( \sqrt{(n+\kappa ){{P}_{k|k, {{\lambda }_{j-1}}}}} \right)}_{i}}, \\ & i = 1, 2, \cdots , n \\ & \chi _{k|k, {{\lambda }_{j-1}}}^{i} = {\hat{x}_{k|k, {{\lambda }_{j-1}}}}-{{\left( \sqrt{(n+\kappa ){{P}_{k|k, {{\lambda }_{j-1}}}}} \right)}_{i}}, \\ & i = n+1, \cdots , 2n \end{aligned}\right. $$ (21) 其中, $ {\hat{x}_{k|k, {\lambda}_{j-1}}} $和$ {P}_{k|k, {\lambda}_{j-1}} $表示系统$ k $时刻下, 伪时间步$ j-1 $的状态估计及其协方差, 量测函数由$ \text{LSTM}_h $模块学习得到, 其内部结构及计算过程如图3所示, 其中, $\lambda=\sqrt{\kappa+n}$, 系统状态协方差及其状态与量测的互协方差如下
$$ \begin{split} {{P}_{zz, k|k, {{\lambda }_{j}}}} = \;&\underset{i = 0}{\overset{2n}{\mathop \sum }} W_{i}^{c}\left( Z_{k|k, {{\lambda }_{j}}}^{i}-{\hat{z}_{k|k, {{\lambda }_{j}}}} \right)\times\\ &{{\left( Z_{k|k, {{\lambda }_{j}}}^{i}-{\hat{z}_{k|k, {{\lambda }_{j}}}} \right)}^\text{T}}+ \frac{{R}_{k}}{\Delta_{j}}\\[-10pt] \end{split} $$ (22) $$ \begin{split} {{P}_{xz, k|k, {{\lambda }_{j}}}} = \;& \underset{i = 0}{\overset{2n}{\mathop \sum }} W_{i}^{c}\left( \chi _{k|k, {{\lambda }_{j-1}}} ^{i}-{\hat{x}_{k|k, {{\lambda }_{j-1}}}} \right)\times\\ &{{\left( Z_{k|k, {{\lambda }_{j}}}^{i}-{\hat{z}_{k|k, {{\lambda }_{j}}}} \right)}^{\text{T}}} \end{split} $$ (23) 滤波增益$ K $以及当前伪时间点下的状态估计和估计方差如下
$$ {{K}_{k|k, {{\lambda }_{j}}}} = {{P}_{xz, k|k, {{\lambda }_{j}}}}{{({{P}_{zz, k|k, {{\lambda }_{j}}}})}^{-1}} $$ (24) $$ \left\{\begin{aligned} & {{{\hat{x}}}_{k|k, {{\lambda }_{j}}}} = {{{\hat{x}}}_{k|k, {{\lambda }_{j-1}}}}+{{K}_{k|k, {{\lambda }_{j}}}}\left( {{z}_{k}}-{\hat{z}_{k|k, {{\lambda }_{j}}}} \right) \\ & {{P}_{k|k, {{\lambda }_{j}}}} = {{P}_{k|k, {{\lambda }_{j-1}}}}-{{K}_{k|k, {{\lambda }_{j}}}}{{P}_{zz, k|k, {{\lambda }_{j}}}}K_{k|k, {{\lambda }_{j}}}^\text{T} \end{aligned}\right. $$ (25) 在第$ N $次更新后$ {{\lambda}_{N}} = 1 $, 最终得到当前时刻目标后验状态向量$ {{\hat{x}}_{k|k}} $和协方差$ {{P}_{k|k}} $. 由此, 完成PUKF-net的预测和渐进量测更新. 最后, PUKF-net算法流程如算法1所示. 用于描述量测模型的$ \text{LSTM}_h $网络具有较强非线性, 线性化误差对滤波器稳定性的破坏风险较大. 根据UKF、PUKF等稳定性分析不难发现, 渐进量测更新过程将有助于降低滤波器稳定性的破坏风险, 同时减少了滤波过程中的线性化误差. 本文利用渐进高斯滤波方法的优势, 引入先验到后验的渐变过程, “放大” 量测噪声协方差来渐进地包含传感器量测, 从而提升了滤波的稳定性.
算法1. PUKF-net算法
1)初始化
2) while do
3) 时间更新: 式 (15) ~ (17)
4) for $ i = 1:N $ do
5) 量测更新: 式(19) ~ (25)
6) end for
7) end while
2.3 损失函数
计算真值$ {{x}_{k}} $与预测值$ {{\hat{x}}_{k|k, {{\lambda }_{j}}}} $的偏差作为$ \text{LSTM}_{h} $和$ \text{LSTM}_{R} $的模型损失, 增加了偏差项以确保$ \text{LSTM}_{Q} $的梯度流通过反向传播被增强[22], 关节角度$ \theta $的损失函数$ L\left( \theta \right) $表示如下
$$ L\left( \theta \right) = \frac{1}{T}\mathop {\mathop \sum \limits^T }\limits_{k = 1} \left({\left\| {{x_k} - {{\hat x}_{k|k - 1}}} \right\|^2} + {\left\| {{x_k} - {{\hat x}_{k|k}}} \right\|^2} \right)$$ (26) 其中, $ T $表示单个训练样本的时间步长, $ {{x}_{k}} $为系统真值, $ {\hat{x}_{k|k-1}} $和$ {{\hat{x}}_{k|k}} $分别为肢体状态预测值和更新值.
3. 实验分析
以人体上肢肘关节运动为例, 设计实验采集肢体sEMG以及关节角度真值, 通过所提出的PUKF-net实现基于sEMG的肢体运动估计, 并与其他方法进行比较, 证明该模型的有效性.
3.1 数据采集
为验证PUKF-net的有效性, 搭建了一套sEMG和肘关节角度采集系统. 使用Myo手环采集上肢在肘关节运动中的sEMG, Myo手环采样频率为200 Hz, 能够同时采集8通道数据. 如图4(a)所示, Myo佩戴在受试者右侧大臂用于采集运动过程的sEMG. 在肘关节角度采集部分, 采用Optitrack视觉捕捉系统分析上肢关节运动特性. Optitrack系统通过12台200 Hz高速相机捕捉发光标记点位置, 并根据预先标定的相机坐标和世界坐标输出标记点在世界坐标系内的三维坐标. 在大臂和小臂上分别放置多个标记点, 防止运动过程中单个标记点丢失. 如图4(b)所示, 将大臂小臂的方向向量映射在三维坐标系中, AB表示受试者大臂, BC表示受试者小臂, 夹角$ \theta $即为上肢肘关节角度.
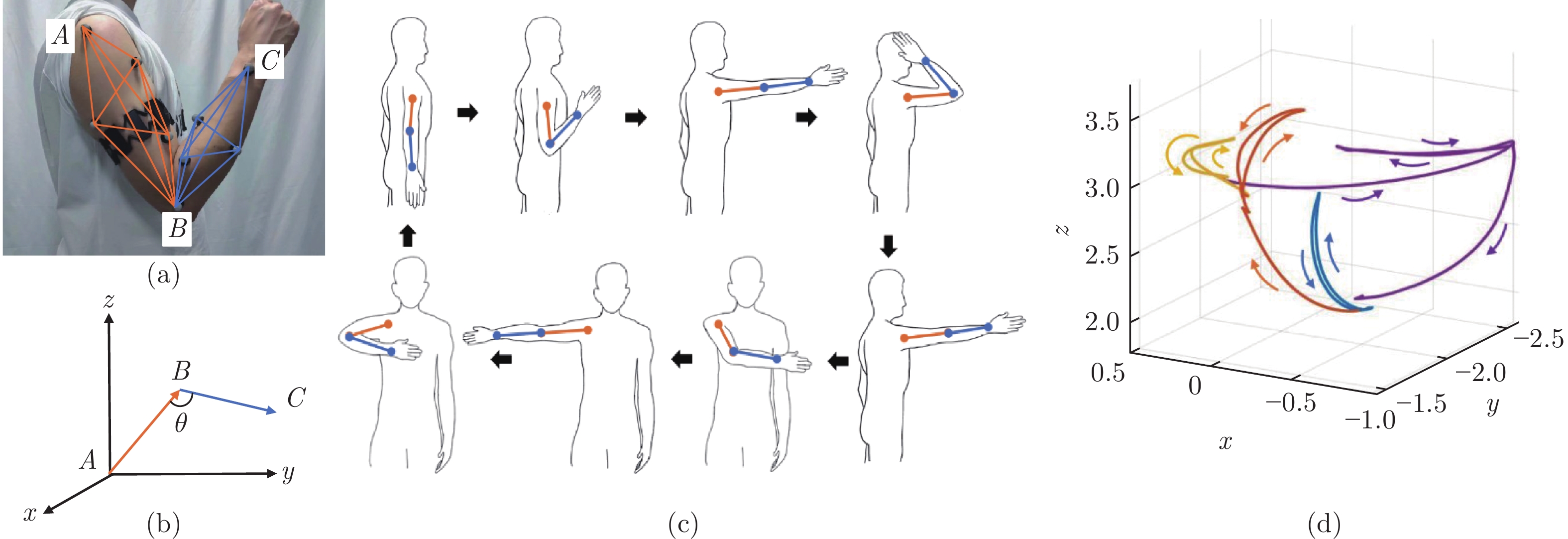 图 4 实验设计 ((a) 传感器布局; (b) 关节角度坐标; (c) 轨迹规划; (d) Optitrack采集到手腕关节点轨迹)Fig. 4 Experiment design ((a) Sensor layout; (b) Joint angle coordinates; (c) Trajectory planning; (d) Track of wrist joint collected by Optitrack)
图 4 实验设计 ((a) 传感器布局; (b) 关节角度坐标; (c) 轨迹规划; (d) Optitrack采集到手腕关节点轨迹)Fig. 4 Experiment design ((a) Sensor layout; (b) Joint angle coordinates; (c) Trajectory planning; (d) Track of wrist joint collected by Optitrack)12名肢体健康的测试者参与实验, 测试者的身体参数如表1所示. 实验时测试者站在Optitrack工作空间, 按照图4(c)规划轨迹依次完成4组肘关节屈伸动作. 肘关节屈伸动作需要肘关节屈曲至最大角度, 停顿后缓慢伸展. 每个位置进行10组肘关节的屈曲和伸展. 测试者充分休息后再次进行10组运动. 为了防止肌肉疲劳, 每组实验之间有3 min的休息时间, 实验持续约30 min. 图4(d)展示了实验过程中Optitrack捕捉到的手腕标记点在三维空间中的轨迹.
表 1 测试者身体参数Table 1 Physiological information of subjects测试者 年龄 身高 (cm) 体重 (kg) 性别 S1 31 155 65 女 S2 24 161 53 女 S3 29 182 85 男 S4 20 177 61 男 S5 25 173 75 男 S6 28 175 65 男 S7 30 160 47 女 S8 25 171 72 男 S9 22 175 70 男 S10 24 162 50 女 S11 32 159 54 女 S12 29 170 78 男 3.2 实验结果
人体上肢肘关节屈伸运动分为肘关节屈曲和肘关节伸展两个过程, 根据解剖学知识, 肘关节屈曲运动主要由肱二头肌、肱肌和肱桡肌协同完成, 肘关节伸展运动则主要与肱三头肌的肌肉活动相关. 测试者均按照图5(a)、图5(b)方式佩戴Myo手环, 然而实际采集到的信号 (如图5(d)) 表明, 肘关节伸展过程中肱三头肌部分sEMG变化并不明显. 为了排除冗余信号的干扰, 利用非负矩阵分解方法[33]得到协同矩阵$ W $(图5(c)), 矩阵中数值越大则表示该通道信号协同性越强, 选取协同性较强的4个通道, 即通道4 ~ 7作为sEMG有效信号.
 图 5 sEMG分析 ((a) 人体大臂肌肉分布; (b) Myo位置肌肉横截面; (c)协同矩阵$ W$; (d) sEMG原始信号)Fig. 5 sEMG analysis ((a) Muscle distribution of human upper arm; (b) Cross-section of Myo wearing position; (c) Non-negative matrix factorization comatrix $ W$; (d) Original signal of sEMG)
图 5 sEMG分析 ((a) 人体大臂肌肉分布; (b) Myo位置肌肉横截面; (c)协同矩阵$ W$; (d) sEMG原始信号)Fig. 5 sEMG analysis ((a) Muscle distribution of human upper arm; (b) Cross-section of Myo wearing position; (c) Non-negative matrix factorization comatrix $ W$; (d) Original signal of sEMG)在获取sEMG有效信号后, 采用均方根欠采样方法[34]对有效sEMG通道进行预处理, 然后将预处理后的信号输入PUKF-net进行训练. 本文建立了LSTM、LSTM-KF[22]、以及本文所设计的PUKF-net模型, 并在PyTorch框架中实现了所有网络的训练和测试. 在初始化阶段, 对于所有网络的LSTM以及LSTM-cell单元采用Xavier初始化. 初始学习率设为0.001, 通过ADAM优化器在统一批量中进行200次迭代训练. 特别地, 由于LSTM隐藏层数量和节点个数会直接影响网络性能, 因此用于对比的LSTM和LSTM-KF采用与PUKF-net相同的隐藏层. 随机选取所有样本中的50% 作为训练集, 其余数据作为测试集.
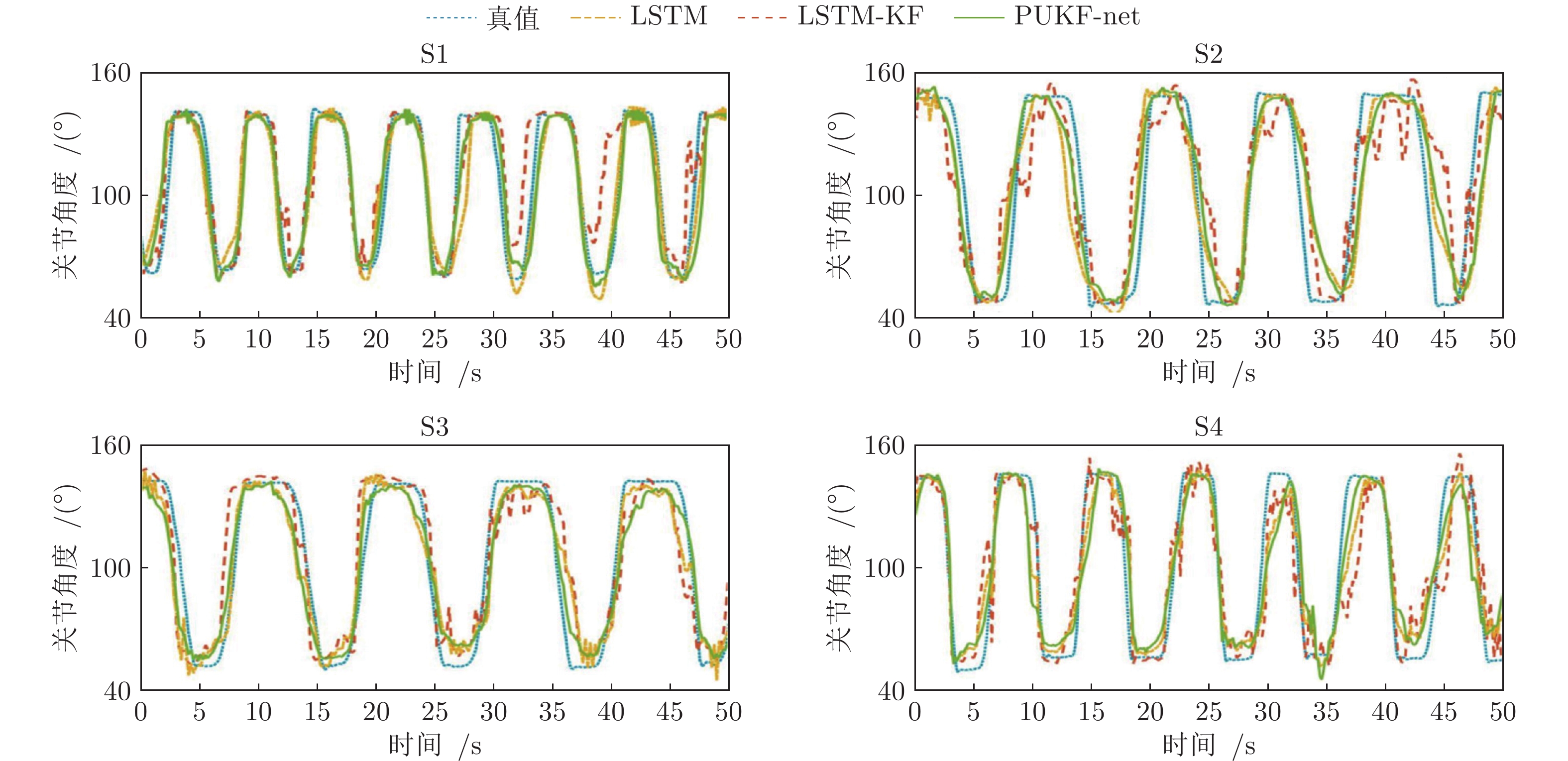
以测试者S1 ~ S4的数据为例, 三种模型基于sEMG估计的人体肘关节角度曲线如图6所示, 可以看出, 通过PUKF-net估计的肘关节角度比其他两个模型的估计值更接近真实值. 特别地, LSTM模型的估计值波动较明显, 在不同测试者数据集上表现差异较大, 这是由于测试者的sEMG存在较大的个体差异. 得益于卡尔曼滤波的抗噪性, LSTM-KF和PUKF-net的预测值波动平缓, PUKF-net整体上更接近真实值.
通过相关系数$ \text{R}^2 $和RMSE评估各个模型性能. $ \text{R}^2 $表示估计结果与真实值的相关性, RMSE计算真实值与估计值之间的幅值差异. 三种模型均能得到有效的人体肘关节角度估计, 且测试者身体参数差异与估计结果没有明显关联, 表2列出了LSTM、LSTM-KF和PUKF-net在12名测试者测试数据集上的相关系数和均方根误差. LSTM、LSTM-KF和PUKF-net的平均RMSE分别为$20.422\;\pm 3.442, 16.069\pm 2.640, 13.668\pm 1.793$, PUKF-net能够在相同隐藏层条件下取得最小的RMSE. 平均$ \text{R}^2 $为$ 0.709\pm 0.057, 0.823\pm 0.041, 0.865\pm 0.024 $, 相比于LSTM和LSTM-KF, PUKF-net通过UT变换和渐进量测方法使得模型估计精度更高, 模型稳定性也有所提高, 在关节角度估计中的RMSE下降了14.9%, $ \text{R}^2 $ 提高了5.1%, 验证了本文提出的PUKF-net模型的有效性.
表 2 LSTM、LSTM-KF、PUKF-net在测试集上的RMSE和$ \text{R}^2 $Table 2 RMSE and $ \text{R}^2 $ of LSTM, LSTM-KF, PUKF-net测试者 RMSE $ \text{R}^2$ LSTM LSTM-KF PUKF-net LSTM LSTM-KF PUKF-net S1 15.913 12.668 11.940 0.823 0.896 0.906 S2 24.568 18.677 15.473 0.622 0.748 0.829 S3 19.736 16.996 14.044 0.737 0.825 0.872 S4 20.653 13.315 12.668 0.679 0.863 0.876 S5 26.746 20.675 16.448 0.629 0.761 0.824 S6 16.793 13.664 11.588 0.803 0.880 0.905 S7 22.193 17.164 14.187 0.699 0.852 0.868 S8 17.984 15.241 12.294 0.748 0.827 0.880 S9 22.537 18.464 15.624 0.710 0.817 0.861 S10 24.142 18.555 16.165 0.655 0.809 0.848 S11 14.601 11.271 10.545 0.682 0.792 0.844 S12 19.196 16.137 13.044 0.721 0.804 0.865 平均值 20.422 16.069 13.668 0.709 0.823 0.865 4. 结论
通过结合LSTM与UKF的优势, 本文设计了PUKF-net模型实现了基于sEMG的上肢运动估计. PUKF-net利用数据驱动的思想解决肢体运动估计中的建模难问题. 同时, 采用渐进量测更新方法来解决运动状态估计过程中线性化误差引起的不稳定问题. 实验表明, 所提出的PUKF-net模型在基于sEMG的上肢关节角度估计中的效果优于LSTM和LSTM-KF模型. 在未来的工作中, 将使用所提出的PUKF-net实现基于多源异构传感器融合的运动估计. 通过整合多源传感器的物理信息和生理信息, 提高机器人柔性感知能力和估计精度.
-
图 2 $ \text{LSTM}_Q$, $ \text{LSTM}_R$网络结构
Fig. 2 Network structure of $ \text{LSTM}_Q$ and $ \text{LSTM}_R$
图 4 实验设计 ((a) 传感器布局; (b) 关节角度坐标; (c) 轨迹规划; (d) Optitrack采集到手腕关节点轨迹)
Fig. 4 Experiment design ((a) Sensor layout; (b) Joint angle coordinates; (c) Trajectory planning; (d) Track of wrist joint collected by Optitrack)
图 5 sEMG分析 ((a) 人体大臂肌肉分布; (b) Myo位置肌肉横截面; (c)协同矩阵$ W$; (d) sEMG原始信号)
Fig. 5 sEMG analysis ((a) Muscle distribution of human upper arm; (b) Cross-section of Myo wearing position; (c) Non-negative matrix factorization comatrix $ W$; (d) Original signal of sEMG)
表 1 测试者身体参数
Table 1 Physiological information of subjects
测试者 年龄 身高 (cm) 体重 (kg) 性别 S1 31 155 65 女 S2 24 161 53 女 S3 29 182 85 男 S4 20 177 61 男 S5 25 173 75 男 S6 28 175 65 男 S7 30 160 47 女 S8 25 171 72 男 S9 22 175 70 男 S10 24 162 50 女 S11 32 159 54 女 S12 29 170 78 男  下载: 导出CSV
下载: 导出CSV
表 2 LSTM、LSTM-KF、PUKF-net在测试集上的RMSE和$ \text{R}^2 $
Table 2 RMSE and $ \text{R}^2 $ of LSTM, LSTM-KF, PUKF-net
测试者 RMSE $ \text{R}^2$ LSTM LSTM-KF PUKF-net LSTM LSTM-KF PUKF-net S1 15.913 12.668 11.940 0.823 0.896 0.906 S2 24.568 18.677 15.473 0.622 0.748 0.829 S3 19.736 16.996 14.044 0.737 0.825 0.872 S4 20.653 13.315 12.668 0.679 0.863 0.876 S5 26.746 20.675 16.448 0.629 0.761 0.824 S6 16.793 13.664 11.588 0.803 0.880 0.905 S7 22.193 17.164 14.187 0.699 0.852 0.868 S8 17.984 15.241 12.294 0.748 0.827 0.880 S9 22.537 18.464 15.624 0.710 0.817 0.861 S10 24.142 18.555 16.165 0.655 0.809 0.848 S11 14.601 11.271 10.545 0.682 0.792 0.844 S12 19.196 16.137 13.044 0.721 0.804 0.865 平均值 20.422 16.069 13.668 0.709 0.823 0.865
下载: 导出CSV
-
[1] Ding Q C, Han J D, Zhao X G. Continuous estimation of human multi-joint angles from sEMG using a state-space model. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25(9): 1518-1528 doi: 10.1109/TNSRE.2016.2639527 [2] 丁其川, 熊安斌, 赵新刚, 韩建达. 基于表面肌电的运动意图识别方法研究及应用综述. 自动化学报, 2016, 42(1): 13-25Ding Qi-Chuan, Xiong An-Bin, Zhao Xin-Gang, Han Jian-Da. A review on researches and applications of sEMG-based motion intent recognition methods. Acta Automatica Sinica, 2016, 42(1): 13-25 [3] Liu H, Tao J, Lyu P, Tian F. Human-robot cooperative control based on sEMG for the upper limb exoskeleton robot. Robotics and Autonomous Systems, 2020, 125: Article No. 103350 doi: 10.1016/j.robot.2019.103350 [4] 陈玲玲, 李珊珊, 刘作军, 张燕. 基于表面肌电的下肢肌肉功能网络构建及其应用研究. 自动化学报, 2017, 43(3): 407-417Chen Ling-Ling, Li Shan-Shan, Liu Zuo-Jun, Zhang Yan. Construction of lower limb's functional muscle network and its application based on surface EMG. Acta Automatica Sinica, 2017, 43(3): 407-417 [5] Pallotti A, Orengo G, Saggio G. Measurements comparison of finger joint angles in hand postures between an sEMG armband and a sensory glove. Biocybernetics and Biomedical Engineering, 2021, 41(2): 605-616 doi: 10.1016/j.bbe.2021.03.003 [6] Ao D, Song R, Gao J W. Movement performance of human — robot cooperation control based on EMG-driven Hill-type and proportional models for an ankle power-assist exoskeleton robot. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25(8): 1125-1134 doi: 10.1109/TNSRE.2016.2583464 [7] He Y, Li F, Li J K, Liu J S, Wu X Y. An sEMG based adaptive method for human-exoskeleton collaboration in variable walking environments. Biomedical Signal Processing and Control, 2022, 74: Article No. 103477 doi: 10.1016/j.bspc.2021.103477 [8] 张鋆豪, 何百岳, 杨旭升, 张文安. 基于可穿戴式惯性传感器的人体运动跟踪方法综述. 自动化学报, 2019, 45(8): 1439-1454 doi: 10.16383/j.aas.c180367Zhang Jun-Hao, He Bai-Yue, Yang Xu-Sheng, Zhang Wen-An. A review on wearable inertial sensor based human motion tracking. Acta Automatica Sinica, 2019, 45(8): 1439-1454 doi: 10.16383/j.aas.c180367 [9] Bahador A, Yousefi M, Marashi M, Bahador O. High accurate lightweight deep learning method for gesture recognition based on surface electromyography. Computer Methods and Programs in Biomedicine, 2020, 195: 105643 doi: 10.1016/j.cmpb.2020.105643 [10] Wang C, Guo W Y, Zhang H, Guo L L, Huang C C, Lin C. sEMG-based continuous estimation of grasp movements by long-short term memory network. Biomedical Signal Processing and Control, 2020, 59: Article No. 101774 doi: 10.1016/j.bspc.2019.101774 [11] 朱煜, 赵江坤, 王逸宁, 郑兵兵. 基于深度学习的人体行为识别算法综述. 自动化学报, 2016, 42(6): 848-857Zhu Yu, Zhao Jiang-Kun, Wang Yi-Ning, Zheng Bing-Bing. A review of human action recognition based on deep learning. Acta Automatica Sinica, 2016, 42(6): 848-857 [12] Yang W, Yang D P, Liu Y, Liu H. Decoding simultaneous multi-DOF wrist movements from raw EMG signals using a convolutional neural network. IEEE Transactions on Human-Machine Systems, 2019, 49(5): 411-420 doi: 10.1109/THMS.2019.2925191 [13] Liu J, Ren Y P, Xu D L, Kang S H, Zhang L Q. EMG-based real-time linear-nonlinear cascade regression decoding of shoulder, elbow, and wrist movements in able-bodied persons and stroke survivors. IEEE Transactions on Biomedical Engineering, 2020, 67(5): 1272-1281 doi: 10.1109/TBME.2019.2935182 [14] Xu L F, Chen X, Cao S, Zhang X, Chen X. Feasibility study of advanced neural networks applied to sEMG-based force estimation. Sensors, 2018, 18(10): 3226 doi: 10.3390/s18103226 [15] Lu Y Z, Wang H, Zhou B, Wei C F, Xu S Q. continuous and simultaneous estimation of lower limb multi-joint angles from sEMG signals based on stacked convolutional and LSTM models. Expert Systems with Applications, 2022, 203: Article No. 117340 doi: 10.1016/j.eswa.2022.117340 [16] Chai Y Y, Liu K P, Li C X, Sun Z B, Jin L, Shi T. A novel method based on long short-term memory network and discrete-time zeroing neural algorithm for upper-limb continuous estimation using sEMG signals. Biomedical Signal Processing and Control, 2021, 67: Article No. 102416 doi: 10.1016/j.bspc.2021.102416 [17] Chen C H, Lu C X, Wang B, Trigoni N, Markham A. DynaNet: neural Kalman dynamical model for motion estimation and prediction. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(12): 5479-5491 doi: 10.1109/TNNLS.2021.3112460 [18] Zhang J, Wu Y N, Jiao S. Research on trajectory tracking algorithm based on LSTM-UKF. In: Proceedings of the 7th IEEE International Conference on Network Intelligence and Digital Content (IC-NIDC). Beijing, China: IEEE, 2021. 61−65 [19] Jondhale S R, Deshpande R S. Kalman filtering framework-based real time target tracking in wireless sensor networks using generalized regression neural networks. IEEE Sensors Journal, 2019, 19(1): 224-233 doi: 10.1109/JSEN.2018.2873357 [20] Lim H, Ryu H, Rhudy M B, Lee D, Jang D, Lee C, et al. Deep learning-aided synthetic airspeed estimation of UAVs for analytical redundancy with a temporal convolutional network. IEEE Robotics and Automation Letters, 2021, 7(1): 17-24 [21] Li J M, Chen C W, Cheng T H. Motion prediction and robust tracking of a dynamic and temporarily-occluded target by an unmanned aerial vehicle. IEEE Transactions on Control Systems Technology, 2020, 29(4): 1623-1635 [22] Coskun H, Achilles F, DiPietro R, Navab N, Tombari F. Long short-term memory Kalman filters: Recurrent neural estimators for pose regularization. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Venice, Italy: IEEE, 2017. 5524−5532 [23] Bao T Z, Zhao Y H, Zaidi S A R, Xie S Q, Yang PF, Zhang Z Q. A deep Kalman filter network for hand kinematics estimation using sEMG. Pattern Recognition Letters, 2021, 143: 88-94 doi: 10.1016/j.patrec.2021.01.001 [24] Zhao C, Sun L, Yan Z, Neumann G, Duckett T, Stolkin R. Learning Kalman Network: a deep monocular visual odometry for on-road driving. Robotics and Autonomous Systems, 2019, 121: Article No. 103234 doi: 10.1016/j.robot.2019.07.004 [25] Revach G, Shlezinger N, van Sloun R J G, Eldar Y C. Kalmannet: Data-driven Kalman filtering. In: Proceedings of the ICASSP 2021 —— 2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Toronto, ON, Canada: IEEE, 2021. 3905−3909 [26] Yang X S, Zhang W A, Liu A D, Yu L. Linear fusion estimation for range-only target tracking with nonlinear transformation. IEEE Transactions on Industrial Informatics, 2020, 16(10): 6403-6412 doi: 10.1109/TII.2019.2955931 [27] 张文安, 陈国庆, 杨旭升. UHF-RFID环境下的移动机器人定位方法. 控制与决策, 2018, 33(10): 1807-1812 doi: 10.13195/j.kzyjc.2017.0741Zhang Wen-An, Chen Guo-Qing, Yang Xu-Sheng. Mobile robot localization method in UHF-RFID. Control and Decision, 2018, 33(10): 1807-1812. doi: 10.13195/j.kzyjc.2017.0741 [28] 李自由, 赵新刚, 张弼, 丁其川, 张道辉, 韩建达. 基于表面肌电的意图识别方法在非理想条件下的研究进展. 自动化学报, 2021, 47(5): 15Li Zi-You, Zhao Xin-Gang, Zhang Bi, Ding Qi-Chuan, Zhang Dao-Hui, Han Jian-Da. Review of sEMG-based motion intent recognition methods in non-ideal conditions. Acta Automatica Sinica, 2021, 47(5): 955-969 [29] Julier S, Uhlmann J, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482 doi: 10.1109/9.847726 [30] Yang X S, Zhang W A, Yu L, Shi L. Performance evaluation of distributed linear regression Kalman filtering fusion. IEEE Transactions on Automatic Control, 2021, 66(6): 2889-2896 doi: 10.1109/TAC.2020.3012638 [31] 郑婷婷, 杨旭升, 张文安, 俞立. 一种高斯渐进滤波框架下的目标跟踪方法. 自动化学报, 2018, 44(12): 2250-2258Zheng Ting-Ting, Yang Xu-Sheng, Zhang Wen-An, Yu Li. A target tracking method in Gaussian progressive filtering framework. Acta Automatica Sinica, 2018, 44(12): 2250-2258 [32] Yang X S, Zhao C, Chen B. Progressive Gaussian approximation filter with adaptive measurement update. Measurement, 2019, 148: Article No. 106898 doi: 10.1016/j.measurement.2019.106898 [33] 谢平, 李欣欣, 杨春华, 杨芳梅, 陈晓玲, 吴晓光. 基于表面肌电非负矩阵分解与一致性的肌间协同耦合关系研究. 中国生物医学工程学报, 2017, 36(2): 150-157 doi: 10.3969/j.issn.0258-8021.2017.02.004Xie Ping, Li Xin-Xin, Yang Chun-Hua, Yang Fang-Mei, Chen Xiao-Ling, Wu Xiao-Guang. Research on the intermuscular synergy and coupling analysis based on surface EMG nonnegative matrix factorization-coherence. Chinese Journal of Biomedical Engineering, 2017, 36(2): 150-157 doi: 10.3969/j.issn.0258-8021.2017.02.004 [34] 佟丽娜, 侯增广, 彭亮, 王卫群, 陈翼雄, 谭民. 基于多路sEMG时序分析的人体运动模式识别方法. 自动化学报, 2014, 40(5): 810-821Tong Li-Na, Hou Zeng-Guang, Peng Liang, Wang Wei-Qun, Chen Yi-Xiong, Tan Min. Multi-channel sEMG time series analysis based human motion recognition method. Acta Automatica Sinica, 2014, 40(5): 810-821 -

 下载:
下载:
计量
- 文章访问数: 856
- HTML全文浏览量: 256
- PDF下载量: 258
- 被引次数: 0
