

A Reduced-order Protocol for Linear Multi-agent Consensus Without Inter-controller Communication
-
摘要: 针对线性同质多智能体系统, 提出一种新的降阶输出反馈一致性协议. 该协议仅依赖智能体间相对输出信息, 当相对输出信息可直接测量时, 该协议无需在邻居智能体间共享控制器的状态, 降低系统对通讯媒介的依赖. 本文首先给出该协议存在的充要条件, 然后证明闭环系统的一致性并计算一致性状态. 理论分析表明, 该协议仍然具有类似分离原理的性质, 因此其参数构造过程非常简便. 最后, 通过数值仿真对比实验, 验证了该控制协议的有效性.Abstract: A new reduced-order output feedback consensus protocol is proposed for linear homogeneous multi-agent systems. An excellent property of the protocol is that only relative output information is needed, helping to reduce the system dependence on communication media, since agents do not need to exchange protocol state information when relative output information can be measured directly. This paper firstly gives the necessary and sufficient conditions for the existence of the protocol, and then proves consensus of the closed-loop system and derives the explicit expression of the consensus states. It is shown that the proposed protocol still meets the separation principle-like property and thus the protocol parameters are easy to compute. Finally, the effectiveness of the protocol is verified by a numerical experiment.
-
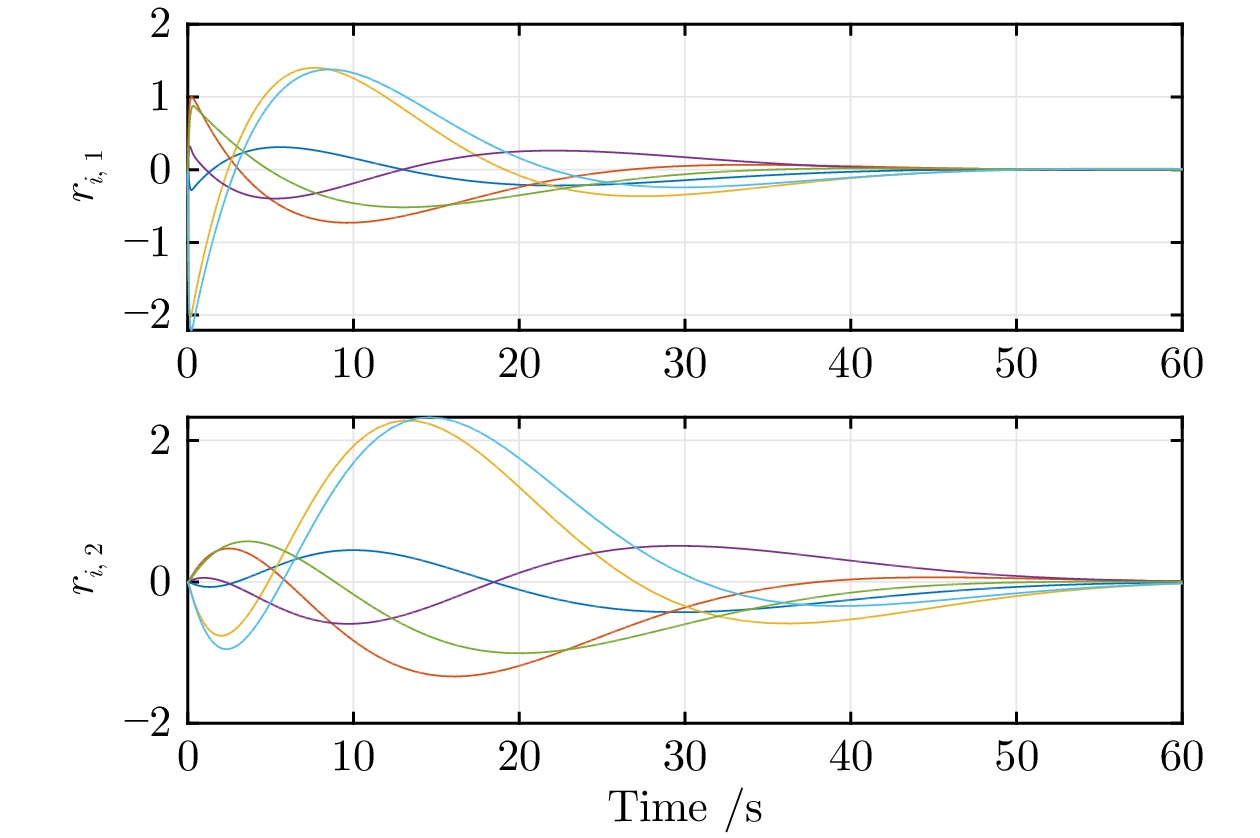
图 2 无控制器通信一致性协议(2)下的控制器状态$ r_i $
Fig. 2 Controller states $ r_i $ under the protocol (2)
-
[1] Yu C B, Hendrickx J M, Fidan B, Anderson B DO, Blondel V D. Three and higher dimensional autonomous formations: Rigidity, persistence and structural persistence. Automatica, 2007, 43(3): 387–402 doi: 10.1016/j.automatica.2006.08.025 [2] Su H S, Wang X F, Lin Z L. Flocking of multi-agents with a virtual leader. IEEE Transactions on Automatic Control, 2009, 54(2): 293–307 doi: 10.1109/TAC.2008.2010897 [3] Cortés J. Distributed algorithms for reaching consensus on general functions. Automatica, 2008, 44(3): 726–737 doi: 10.1016/j.automatica.2007.07.022 [4] Ren H R, Wang Y, Liu M, Li H Y. An optimal estimation framework of multi-agent systems with random transport protocol. IEEE Transactions on Signal Processing, 2022, 70: 2548–2559 doi: 10.1109/TSP.2022.3175020 [5] Hu Z P, Ren H R, Shi P. Synchronization of complex dynamical networks subject to noisy sampling interval and packet loss. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(8): 3216–3226 doi: 10.1109/TNNLS.2021.3051052 [6] Olfati-Saber R, Fax J A, Murray R M. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 2007, 95(1): 215–233 doi: 10.1109/JPROC.2006.887293 [7] Yu W W, Chen G R, Cao M. Some necessary and suffcient conditions for second-order consensus in multi-agent dynamical systems. Automatica, 2010, 46(6): 1089–1095 doi: 10.1016/j.automatica.2010.03.006 [8] Li Z K, Ren W, Liu X D, Fu M Y. Consensus of multi-agent systems with general linear and Lipschitz nonlinear dynamics using distributed adaptive protocols. IEEE Transactions on Automatic Control, 2012, 58(7): 1786–1791 [9] Li Z K, Wen G H, Duan Z S, Ren W. Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE Transactions on Automatic Control, 2015, 60(4): 1152–1157 doi: 10.1109/TAC.2014.2350391 [10] Han T, Guan Z H, Xiao B, Wu J, Chen X. Distributed output consensus of heterogeneous multi-agent systems via an output regulation approach. Neurocomputing, 2019, 360: 131–137 doi: 10.1016/j.neucom.2019.06.028 [11] Wieland P, Sepulchre R, Allgöwer F. An internal model principle is necessary and suffcient for linear output synchronization. Automatica, 2011, 47(5): 1068–1074 doi: 10.1016/j.automatica.2011.01.081 [12] Trentelman H L, Takaba K, Monshizadeh N. Robust synchronization of uncertain linear multi-agent systems. IEEE Transactions on Automatic Control, 2013, 58(6): 1511–1523 doi: 10.1109/TAC.2013.2239011 [13] Xu X, Liu L, Feng G. Consensus of discrete-time linear multiagent systems with communication, input and output delays. IEEE Transactions on Automatic Control, 2018, 63(2): 492–497 doi: 10.1109/TAC.2017.2720703 [14] Li X W, Soh Y C, Xie L H. Robust consensus of uncertain linear multi-agent systems via dynamic output feedback. Automatica, 2018, 98: 114–123 doi: 10.1016/j.automatica.2018.09.020 [15] Li Z K, Duan Z S, Chen G R, Huang L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Transactions on Circuits and Systems I: Regular Papers, 2010, 57(1): 213–224 doi: 10.1109/TCSI.2009.2023937 [16] Zhou B, Xu C C, Duan G R. Distributed and truncated reducedorder observer based output feedback consensus of multi-agent systems. IEEE Transactions on Automatic Control, 2014, 59(8): 2264–2270 doi: 10.1109/TAC.2014.2301573 [17] Lu M B, Liu L. Cooperative output regulation of linear multiagent systems by a novel distributed dynamic compensator. IEEE Transactions on Automatic Control, 2017, 62(12): 6481–6488 doi: 10.1109/TAC.2017.2658026 [18] Lv Y Z, Wen G H, Huang T W, Duan Z S. Adaptive attackfree protocol for consensus tracking with pure relative output information. Automatica, 2020, 117. Article No.108998 doi: 10.1016/j.automatica.2020.108998 [19] Li X W, Soh Y C, Xie L H. A novel reduced-order protocol for consensus control of linear multi-agent systems. IEEE Transactions on Automatic Control, 2019, 64(7): 3005–3012 doi: 10.1109/TAC.2018.2876390 [20] Seo J H, Shim H, Back J. Consensus of high-order linear systems using dynamic output feedback compensator: Low gain approach. Automatica, 2009, 45(11): 2659–2664 doi: 10.1016/j.automatica.2009.07.022 [21] Li X W, Soh Y C, Xie L H. Output-feedback protocols without controller interaction for consensus of homogeneous multi-agent systems: A unified robust control view. Automatica, 2017, 81: 37–45 doi: 10.1016/j.automatica.2017.03.001 [22] Zhao Y, Wen G H, Duan Z S, Xu X, Chen G R. A new observer-type consensus protocol for linear multi-agent dynamical systems. Asian Journal of Control, 2013, 15(2): 571–582 doi: 10.1002/asjc.572 [23] Lv Y Z, Wen G H, Huang T W. Adaptive protocol design for distributed tracking with relative output information: A distributed fixed-time observer approach. IEEE Transactions on Control of Network Systems, 2020, 7(1): 118–128 doi: 10.1109/TCNS.2019.2919855 [24] Stoorvogel A A, Saberi A, Zhang M R. Solvability conditions and design for state synchronization of multi-agent systems. Automatica, 2017, 84: 43–47 doi: 10.1016/j.automatica.2017.06.016 [25] Scardovi L, Sepulchre R. Synchronization in networks of identical linear systems. Automatica, 2009, 45(11): 2557–2562 doi: 10.1016/j.automatica.2009.07.006 [26] Xu J, Xie L H, Li T, Lum K Y. Consensus of multi-agent systems with general linear dynamics via dynamic output feedback control. IET Control Theory & Applications, 2013, 7(1): 108–115 [27] 李润梅, 张立威, 王剑. 基于时变间距和相对角度的无人车跟随控制 方法研究. 自动化学报, 2018, 44(11): 2031-2040Li Run-Mei, Zhang Li-Wei, Wang Jian. A control method of unmanned car following under time-varying relative distance and angle. Acta Automatica Sinica, 2018, 44(11): 2031–2040. [28] Hou M, Muller P C. Design of observers for linear systems with unknown inputs. IEEE Transactions on Automatic Control, 1992, 37(6): 871–875 doi: 10.1109/9.256351 [29] Ren W, Beard R W. Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5): 655–661 doi: 10.1109/TAC.2005.846556 -

 下载:
下载:


图(4)
计量
- 文章访问数: 1301
- HTML全文浏览量: 261
- PDF下载量: 348
- 被引次数: 0
