

Lateral Stability Control of Six-wheeled Skid-steering Robot Based on Hierarchical Control Strategy
-
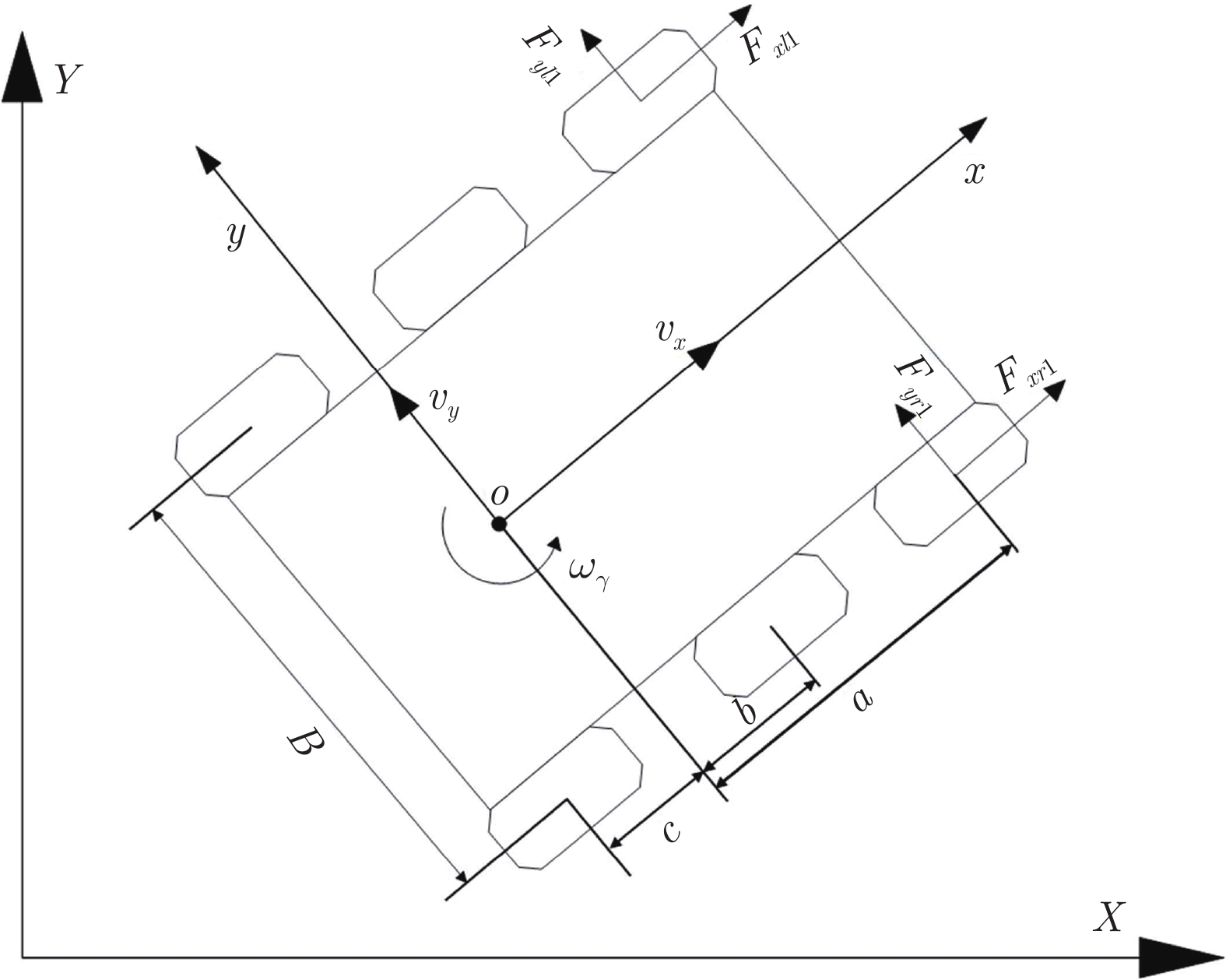
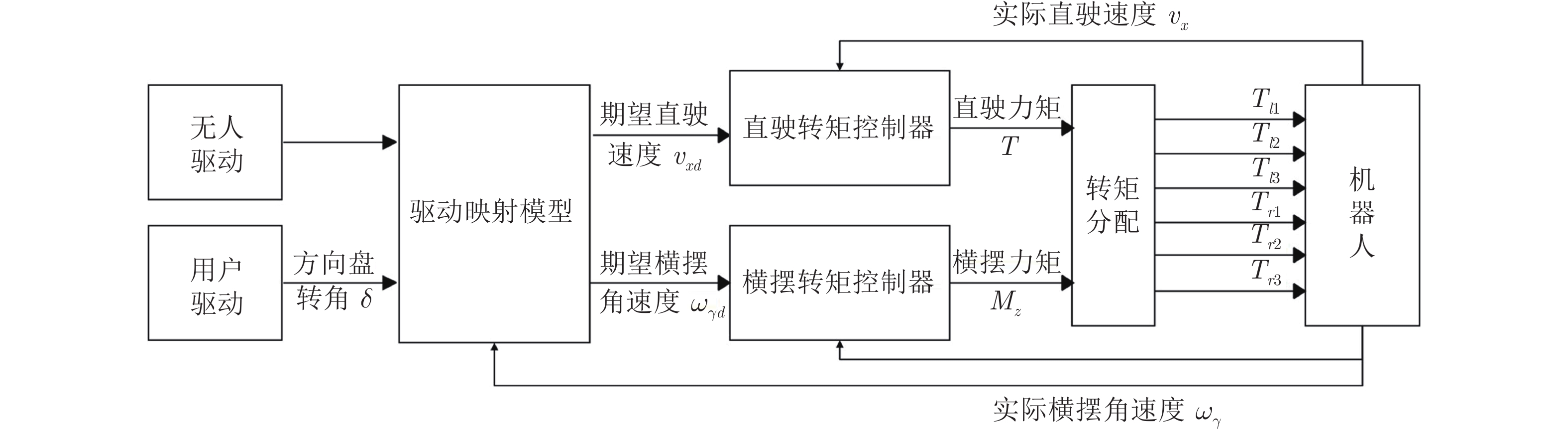
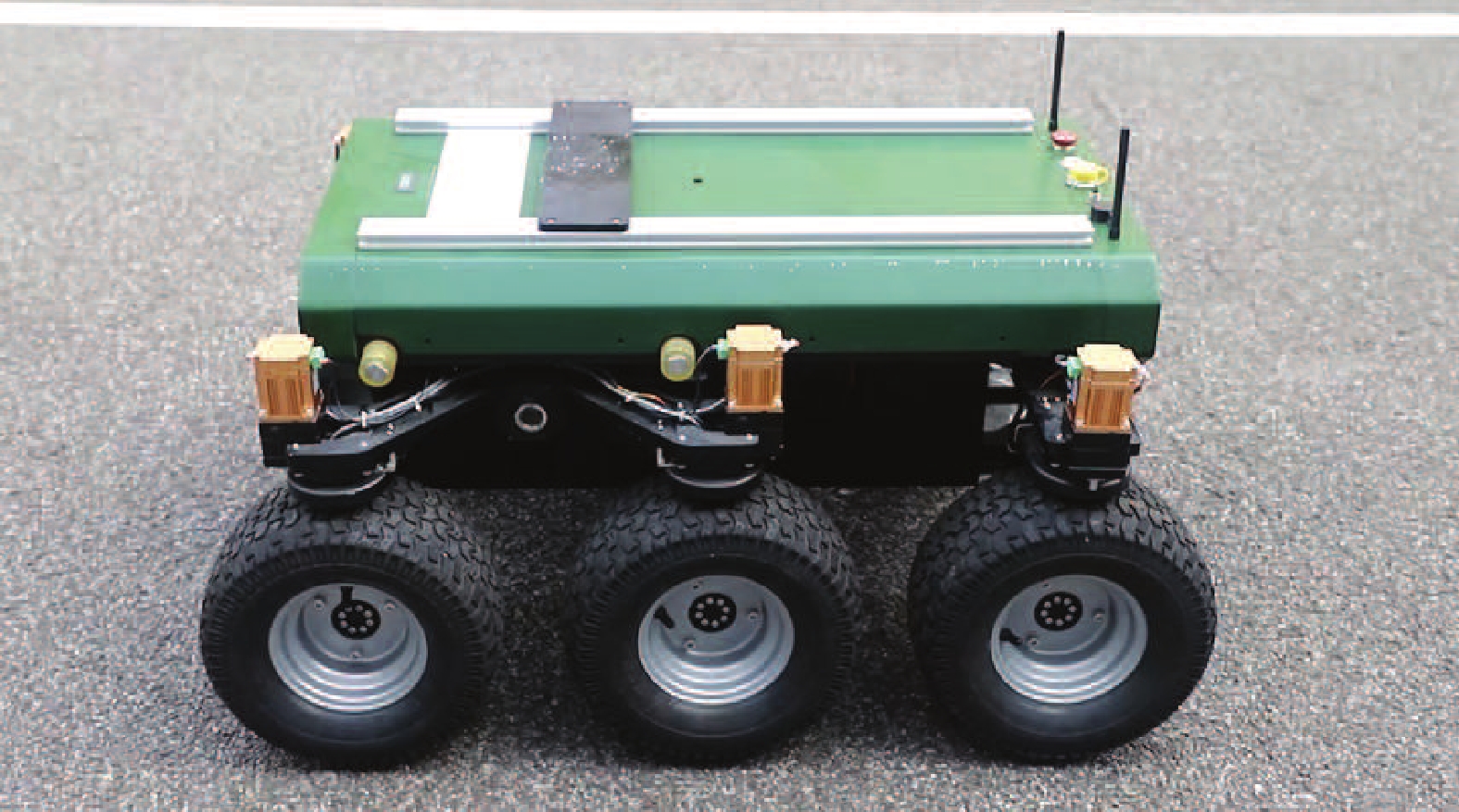
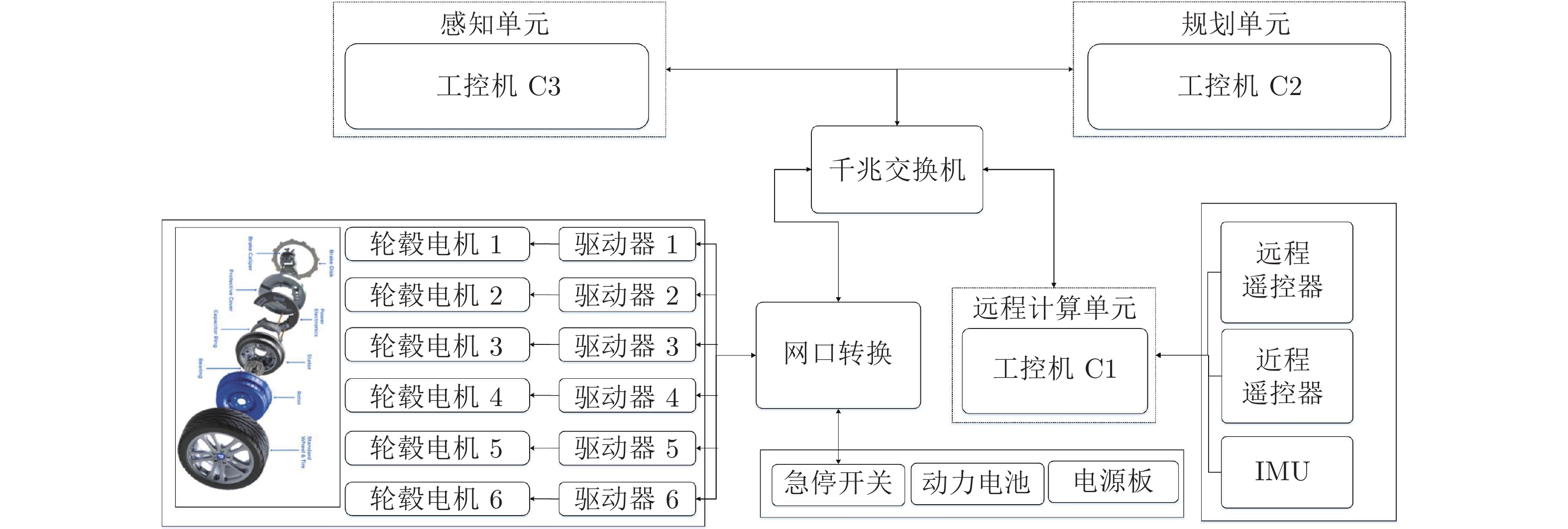
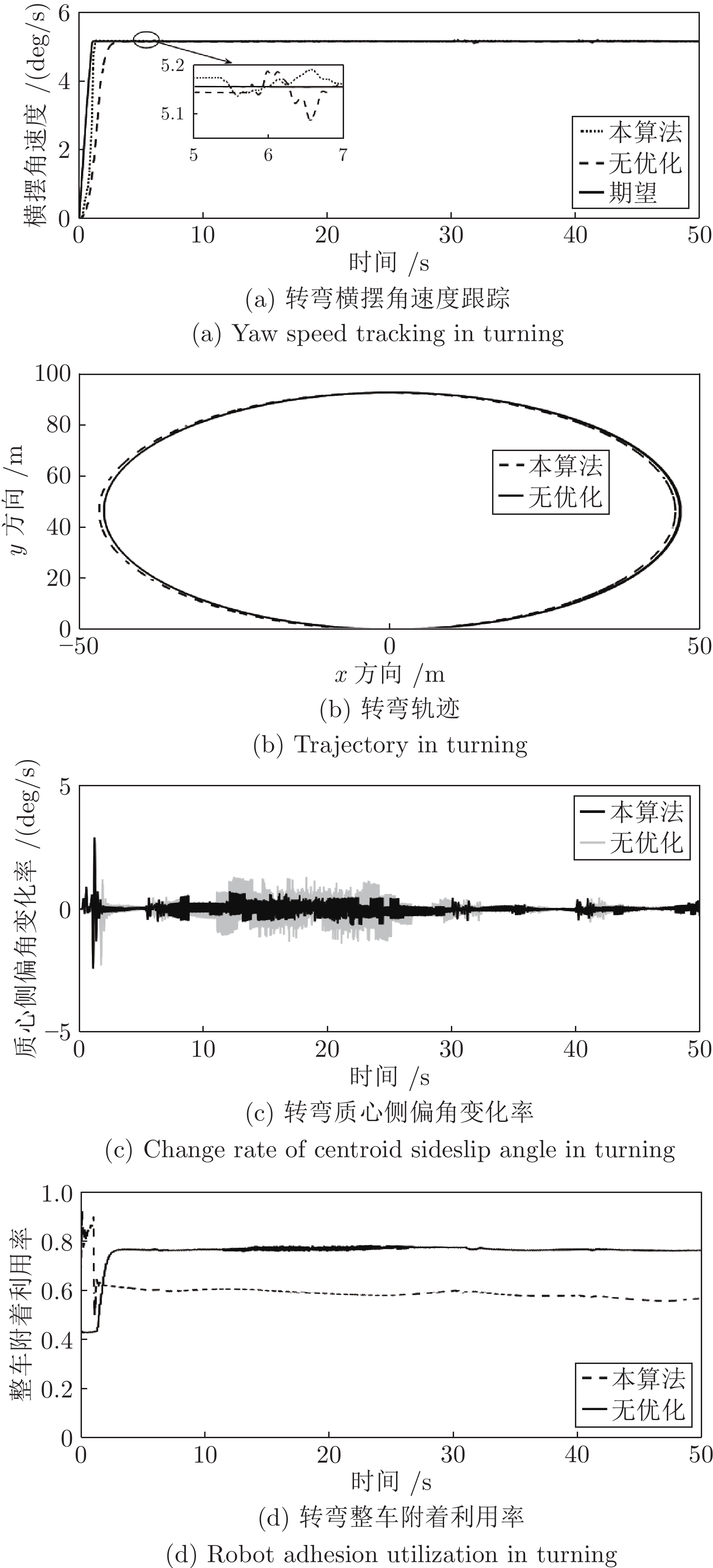
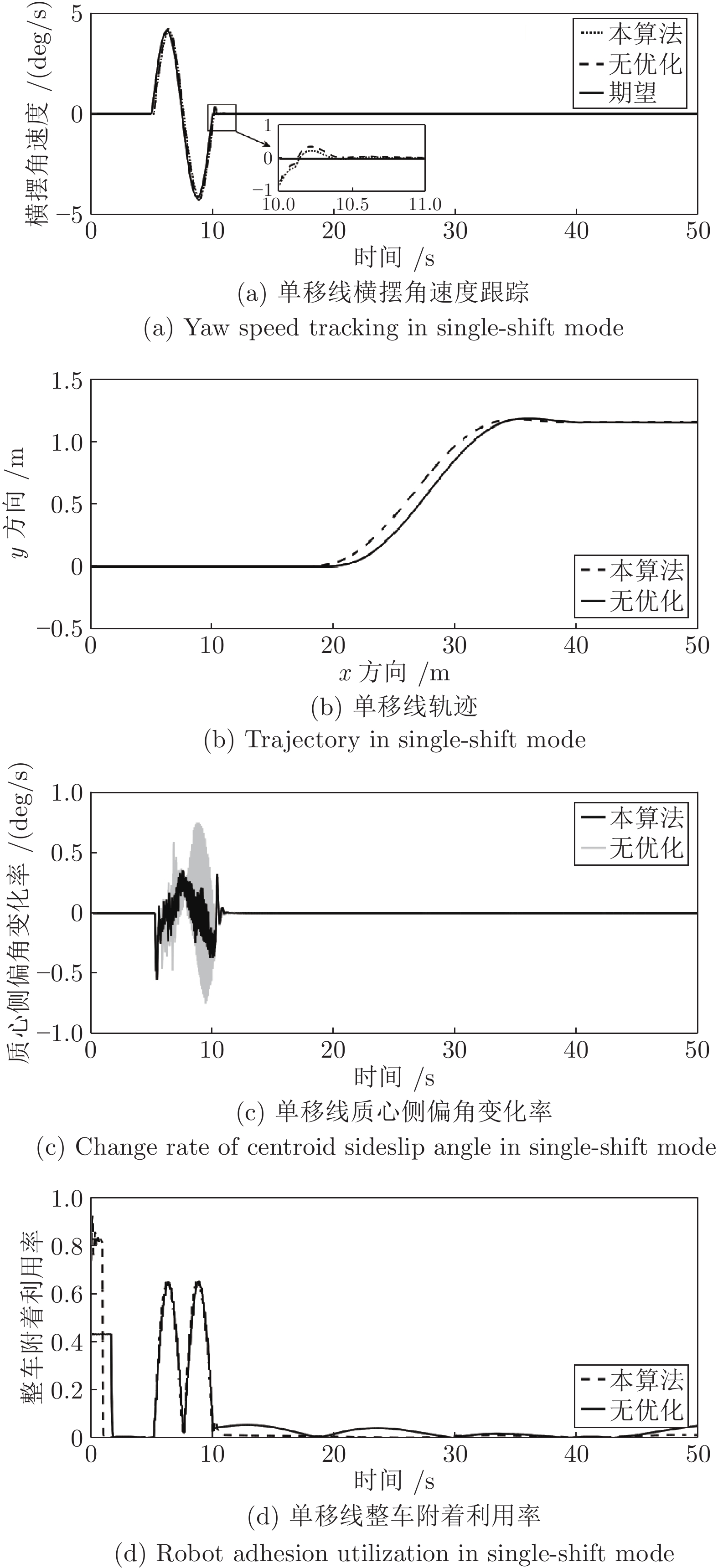
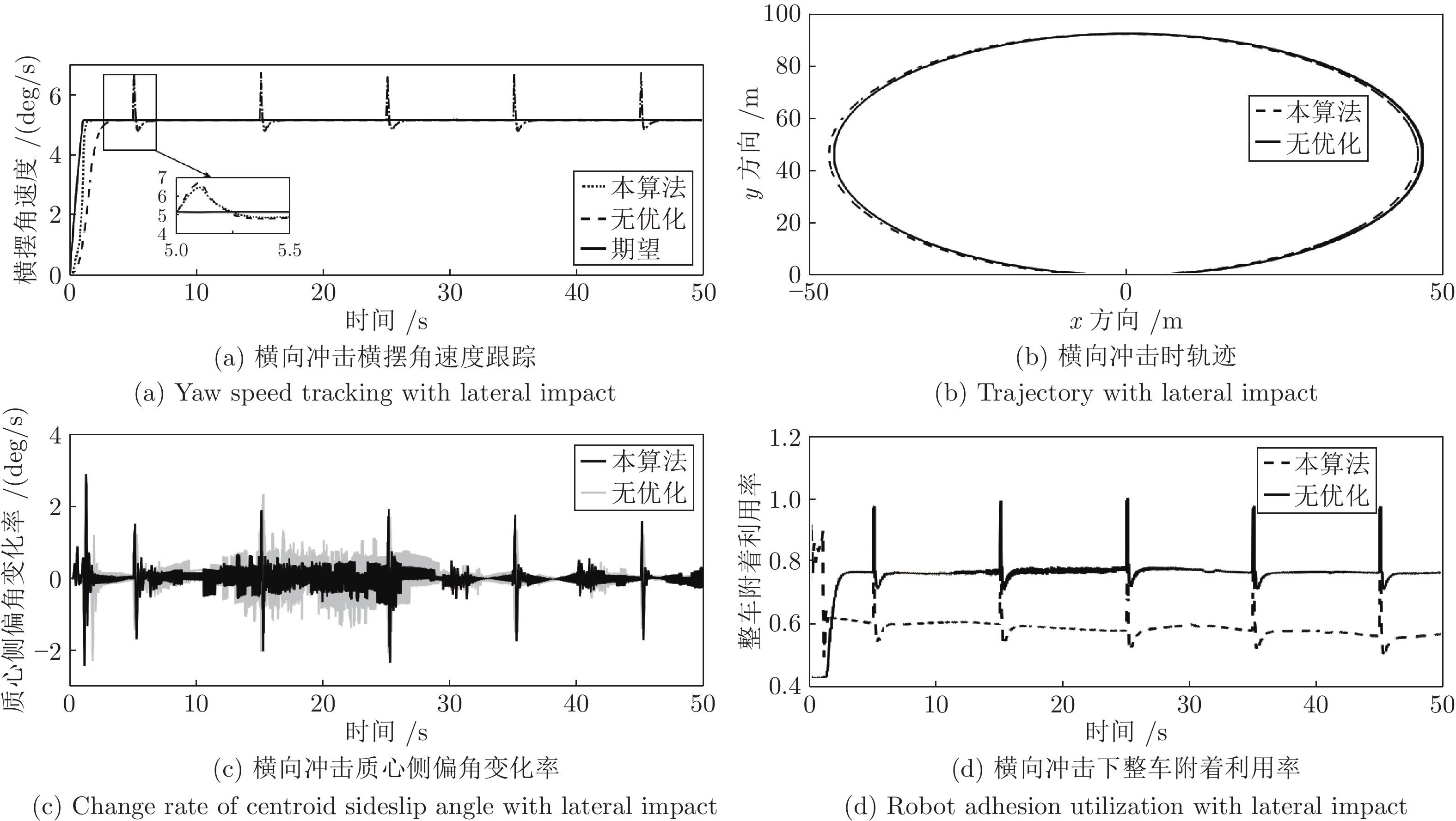
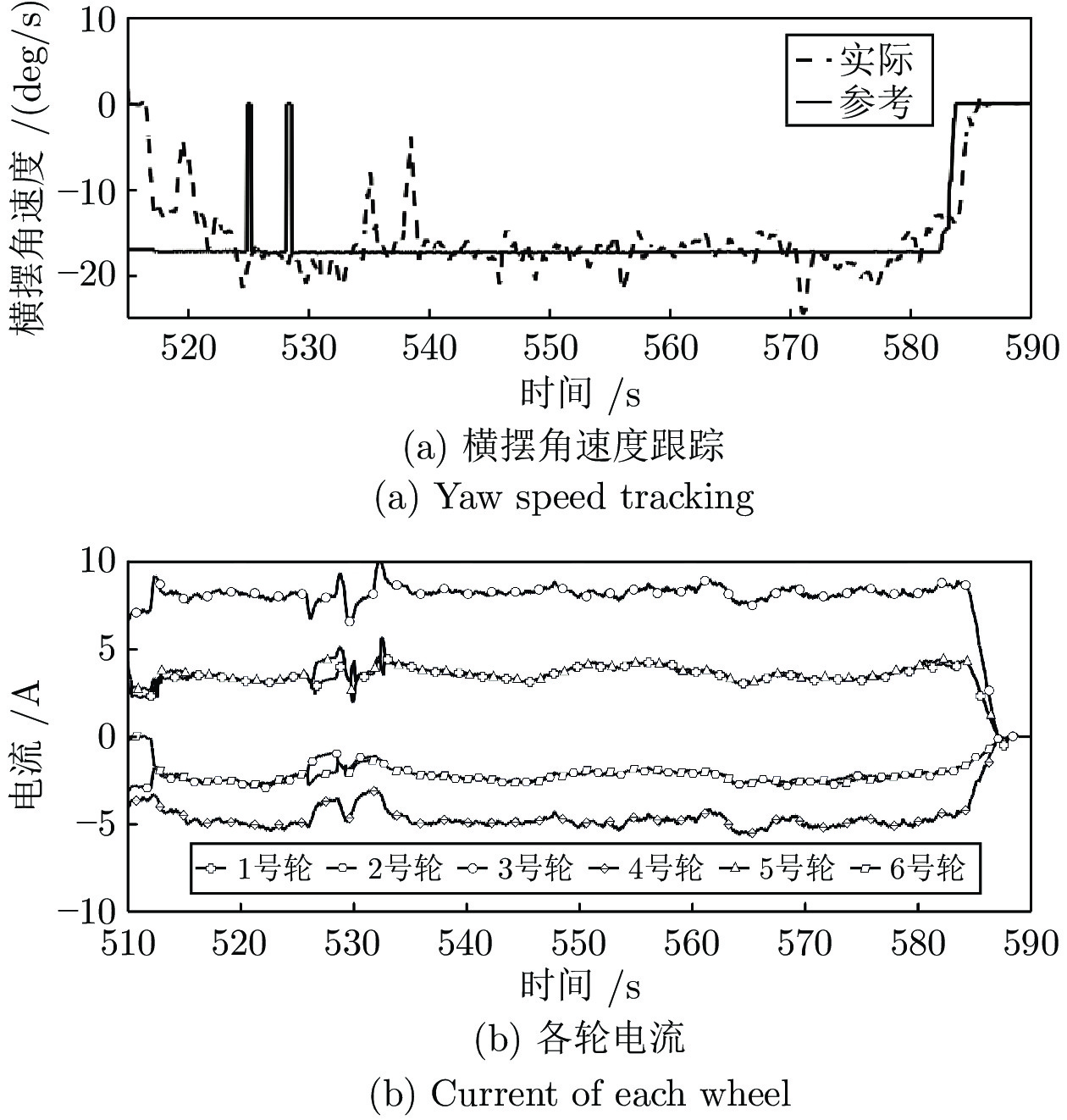
摘要: 六轮野外机器人通常体积庞大, 难以建立其动力学模型. 采用传统的速度控制方法很难保证机器人的横向稳定性. 为解决这一问题, 开展基于分层控制策略的六轮滑移机器人横向稳定性控制研究. 首先分析整车受力情况, 建立六轮滑移机器人的动力学模型. 其次, 设计基于分层控制策略的动力学控制器, 其中上层为基于改进趋近律的滑模控制器, 实现对期望横摆角速度的跟踪; 下层为基于附着率最优的转矩分配控制器, 该控制器可以保证机器人行驶的横向稳定性. 最后, 在不同工况下进行仿真实验, 并搭建实验平台进行实物测试. 结果表明设计的控制器可以有效提高机器人的横向稳定性.Abstract: The six-wheeled outdoor robots are usually bulky and their dynamic models are difficult to obtain. Therefore it is difficult to guarantee the lateral stability of the robots by using traditional speed control methods. To solve this problem, this paper investigates the lateral stability control of a class of six-wheeled skid-steering robots based on a hierarchical control strategy. Firstly the dynamic model of the robots is established through thorough force analysis. Then a hierarchical control strategy is proposed in which a sliding mode controller based on the improved reaching law is designed for the upper layer to make the yaw speed track the desired rate. The torque distributor is designed for the second layer based on the optimal adhesion ratio to ensure the lateral stability of the robots. Finally, simulations are carried out under different conditions, and a test platform is built for experimental test. The results show that the hierarchical control strategy can effectively improve the lateral stability of the robots.
-
表 1 模型参数
Table 1 Model parameters
参数名称 参数含义 $O$ 机器人重心 $B$ 机器人轮距 $a,b,c$ 前中后三轴距重心轴距离 $v_{x}$ 重心的纵向速度 $v_{y}$ 重心的横向速度 $\omega_{\gamma}$ 横摆角速度 $F_{xij}$ 车胎所受纵向力 $F_{yij}$ 车胎所受横向力  下载: 导出CSV
下载: 导出CSV
表 2 机器人参数
Table 2 Robot parameters
参数名称 参数值 单位 整车质量$m$ 2 655 kg 绕$z$轴转动惯量$I_{z}$ 5 813.86 $\text{kg}\cdot {{\text{m}}^{\text{2}}}$ 质心到前轴距离$a$ 2 m 质心到中轴距离$b$ 0 m 质心到后轴距离$c$ 2 m 轮距$B$ 2.03 m 车轮有效半径$r$ 0.425 m
下载: 导出CSV
-
[1] Zhao H, Luo C, Xu Y, Li J. Differential steering control for 6×6 wheel-drive mobile robot. In: Proceedings of the 26th International Conference on Automation and Computing. Portsmouth, UK: IEEE, 2021. 1−6 [2] 孙忠廷, 柏建军, 陈炳旭, 陈云. 轮式移动机器人自适应轨迹跟踪控制. 控制工程, 2021, 28(12): 2420-2425 doi: 10.14107/j.cnki.kzgc.20200387Sun Zhong-Ting, Bai Jian-Jun, Chen Bing-Xu, Chen Yun. Adaptive trajectory tracking control for wheeled mobile robots. Control Engineering, 2021, 28(12): 2420-2425 doi: 10.14107/j.cnki.kzgc.20200387 [3] Maclaurin B. Comparing the steering performances of skid- and Ackermann-steered vehicles. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering. 2008, 222(5): 739-756 doi: 10.1243/09544070JAUTO567 [4] Yu W, Chuy O Y, Collins E G, Hollis P. Analysis and experimental verification for dynamic modeling of a skid-steered wheeled vehicle. IEEE Transactions on Robotics, 2010, 26(2): 340-353 doi: 10.1109/TRO.2010.2042540 [5] Liao J, Chen Z, Yao B. Model-based coordinated control of four-wheel independently driven skid steer mobile robot with wheel–ground interaction and wheel dynamics. IEEE Transactions on Industrial Informatics, 2018, 15(3): 1742-1752 [6] Tang S, Yuan S, Li X, Zhou J. Dynamic modeling and experimental validation of skid-steered wheeled vehicles with low-pressure pneumatic tires on soft terrain. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2020, 234(2-3): 840-856 doi: 10.1177/0954407019847302 [7] Du P, Ma Z, Chen H, Xu D, Wang Y, Jiang Y, et al. Speed-adaptive motion control algorithm for differential steering vehicle. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(2-3): 672-85 doi: 10.1177/0954407020950588 [8] 熊璐, 黄少帅, 陈远龙, 杨光兴, 章仁燮. 轮式差动转向无人车运动跟踪控制的研究. 汽车工程, 2015, 37(10): 1109-1116 doi: 10.3969/j.issn.1000-680X.2015.10.002Xiong Lu, Huang Shao-Shuai, Chen Yuan-Long, Yang Guang-Xing, Zhang Ren-Xie. Research on motion tracking control of wheeled differential steering unmanned vehicle. Automotive Engineering, 2015, 37(10): 1109-1116 doi: 10.3969/j.issn.1000-680X.2015.10.002 [9] 王昕煜, 平雪良. 基于多传感器融合信息的移动机器人速度控制方法. 工程设计学报, 2021, 28(1): 63-71 doi: 10.3785/j.issn.1006-754X.2021.00.013Wang Xin-Yu, Ping Xue-Liang. Speed control method of mobile robot based on multi-sensor fusion information. Journal of Engineering Design, 2021, 28(1): 63-71 doi: 10.3785/j.issn.1006-754X.2021.00.013 [10] 贾松敏, 卢兴阳, 张祥银, 张国梁. 轮子打滑状态下全向移动机器人轨迹跟踪控制. 控制与决策, 2020, 35(4): 833-842 doi: 10.13195/j.kzyjc.2018.0644Jia Song-Min, Lu Xing-Yang, Zhang Xiang-Yin, Zhang Guo-Liang. Trajectory tracking control of omnidirectional mobile robot under wheel slip. Control and Decision Making, 2020, 35(4): 833-842 doi: 10.13195/j.kzyjc.2018.0644 [11] 王玉琼, 高松, 王玉海, 徐艺, 郭栋, 周英超. 高速无人驾驶车辆轨迹跟踪和稳定性控制. 浙江大学学报(工学版), 2021, 55(10): 1922-1929 doi: 10.3785/j.issn.1008-973X.2021.10.014Wang Yu-Qiong, Gao Song, Wang Yu-Hai, Xu Yi, Guo Dong, Zhou Ying-Chao. Trajectory tracking and stability control of high speed unmanned vehicle. Journal of Zhejiang University (Engineering Edition), 2021, 55(10): 1922-1929 doi: 10.3785/j.issn.1008-973X.2021.10.014 [12] Ni J, Hu J, Xiang C. Robust path following control at driving handling limits of an autonomous electric racecar. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5518-5526 doi: 10.1109/TVT.2019.2911862 [13] Shino M, Nagai M. Independent wheel torque control of small-scale electric vehicle for handling and stability improvement. JSAE Review, 2003, 24(4): 449-456 doi: 10.1016/S0389-4304(03)00080-8 [14] 续丹, 王国栋, 曹秉刚. 独立驱动电动汽车的转矩优化分配策略研究. 西安交通大学学报, 2012, 46(3): 42−46Xu Dan, Wang Guo-Dong, Cao Bing-Gang. Research on torque optimal allocation strategy of independent drive electric vehicle. Journal of Xi'an Jiaotong University, 2012, 46(3): 42−46 [15] 李庆望, 张缓缓, 严帅, 高超. 四轮独立驱动电动汽车单轮失效稳定性控制. 控制工程, 2021, 28(1): 155-163 doi: 10.14107/j.cnki.kzgc.20190045Li Qing-Wang, Zhang Huan-Huan, Yan Shuai, Gao Chao. Single wheel failure stability control for four-wheel independent drive electric vehicles. Control Engineering, 2021, 28 (1): 155-163 doi: 10.14107/j.cnki.kzgc.20190045 [16] 闫永宝, 张豫南, 颜南明, 韩宝亮. 六轮独立驱动滑动转向车辆运动控制算法仿真研究. 兵工学报, 2013, 34(11): 1461-1468 doi: 10.3969/j.issn.1000-1093.2013.11.019Yan Yong-Bao, Zhang Yu-Nan, Yan Nan-Ming, Han Bao-Liang. Simulation research on motion control algorithm of six wheel independent drive sliding steering vehicle. Journal of Ordnance Industry, 2013, 34 (11): 1461-1468 doi: 10.3969/j.issn.1000-1093.2013.11.019 [17] 晏永, 曾京, 徐坤, 赵飞燕. 悬挂阻尼与车辆蛇行运动稳定性关系. 系统仿真学报, 2021, 33(8): 1784-1790 doi: 10.16182/j.issn1004731x.joss.20-0237Yan Yong, Zeng Jing, Xu Kun, Zhao Fei-Yan. Relationship between suspension damping and vehicle hunting stability. Journal of System Simulation, 2021, 33(8): 1784-1790 doi: 10.16182/j.issn1004731x.joss.20-0237 [18] Belrzaeg M, Ahmed A A, Almabrouk A Q, Khaleel M M, Ahmed A A, Almukhtar M. Vehicle dynamics and tire models: An overview. World Journal of Advanced Research and Reviews, 2021, 12(1): 331-348 doi: 10.30574/wjarr.2021.12.1.0524 [19] Kozowski K, Pazderski D. Modeling and control of a 4-wheel skid-steering mobile robot. International Journal of Applied Mathematics and Computer Science, 2004, 14(4) [20] 余卓平, 高乐天, 章仁燮, 熊璐. 轮边电机驱动差动转向车辆动力学控制. 同济大学学报: 自然科学版, 2018, 46(5): 631-638Yu Zhuo-Ping, Gao Le-Tian, Zhang Ren-Xie, Xiong Lu. Dynamic control of differential steering vehicle driven by wheel motor. Journal of Tongji University: Natural Science Edition, 2018, 46 (5): 631-638 [21] Macadam C C. Understanding and modeling the human driver. Vehicle System Dynamics, 2003, 40(1-3): 101-134 doi: 10.1076/vesd.40.1.101.15875 [22] Zhang X, Sun L, Zhao K, Sun L. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques. IEEE Transactions on Power Electronics, 2013, 28(3): 1358-1365 doi: 10.1109/TPEL.2012.2206610 -

 下载:
下载:


图(10) / 表(2)
计量
- 文章访问数: 4163
- HTML全文浏览量: 702
- PDF下载量: 313
- 被引次数: 0
