

A Class Incremental Learning and Memory Fusion Method Using Random Weight Neural Networks
-
摘要: 连续学习(Continual learning, CL)多个任务的能力对于通用人工智能的发展至关重要. 现有人工神经网络(Artificial neural networks, ANNs)在单一任务上具有出色表现, 但在开放环境中依次面对不同任务时非常容易发生灾难性遗忘现象, 即联结主义模型在学习新任务时会迅速地忘记旧任务. 为了解决这个问题, 将随机权神经网络(Random weight neural networks, RWNNs)与生物大脑的相关工作机制联系起来, 提出一种新的再可塑性启发的随机化网络(Metaplasticity-inspired randomized network, MRNet)用于类增量学习(Class incremental learning, Class-IL)场景, 使得单一模型在不访问旧任务数据的情况下能够从未知的任务序列中学习与记忆融合. 首先, 以前馈方式构造具有解析解的通用连续学习框架, 用于有效兼容新任务中出现的新类别; 然后, 基于突触可塑性设计具备记忆功能的权值重要性矩阵, 自适应地调整网络参数以避免发生遗忘; 最后, 所提方法的有效性和高效性通过5个评价指标、5个基准任务序列和10个比较方法在类增量学习场景中得到验证.Abstract: The ability to continual learning (CL) on multiple tasks is crucial for the development of artificial general intelligence. Existing artificial neural networks (ANNs) performing well on a single task are prone to suffer from catastrophic forgetting when sequentially fed with different tasks in an open-ended environment, that is, the connectionist models trained on a new task could rapidly forget what was learned previously. To solve the problem, this paper proposes a new metaplasticity-inspired randomized network (MRNet) for the class incremental learning (Class-IL) scenario by relating random weight neural networks (RWNNs) with the relevant working mechanism of biological brain, which enables a single model to learn and remember the unknown task sequence without accessing old task data. First, a general continual learning framework with the closed-form solution is constructed in a feed-forward manner to effectively accommodate new categories emerging in new tasks; Second, a memory-related weight importance matrix is formed by referring to the property of synapses, which adaptively adjusts network parameters to avoid forgetting; Finally, effectiveness and efficiency of the proposed method are demonstrated in the class incremental learning scenario with 5 evaluation metrics, 5 benchmark task sequences, and 10 comparison methods.
-
二维系统与现代过程控制密切相关, 在污水处理、多维数字滤波器、卫星气象云图分析、图像处理等领域有广泛的应用[1-2].由于二维系统具有丰富的工程物理背景, 至今仍是控制领域的研究热点之一.近年来二维系统的分析和控制器设计方面取得了诸多成果, 如文献[3]给出了二维离散线性模型的稳定性判据, 文献[4]给出了二维离散系统的状态反馈控制器设计方法.在此基础上, 二维系统的滤波器设计、$ {H_\infty} $控制等问题也得到了深入研究[5-6].
另一方面, 现代工业过程对于系统安全性和可靠性的要求日益提高, 因此故障检测与故障诊断问题越来越受到重视[7-10].与一维系统相比, 二维系统由于结构复杂, 其故障检测滤波器/观测器的设计难度更大, 需要提出新技术解决设计过程中遇到的非凸问题.此外, 二维系统的残差评价函数以及阈值的设计亦不同于一维系统, 需根据二维系统的特点构造合适的残差评价函数及阈值.因此, 研究二维系统的故障检测问题是非常必要的, 也是存在挑战的.然而, 现有文献的研究成果相对较少, 其中文献[11-13]研究了二维系统的故障检测问题, 采用了全频设计方法, 即没有考虑故障发生的有限频信息; 文献[14]研究了二维Roesser系统在传感器失效情况下的故障检测问题; 文献[15]研究了二维FM系统的故障检测问题.
文献[16]指出, 系统设计时控制单元和故障检测单元是相互关联和作用的, 如果将控制单元和故障检测单元分开设计, 容易忽视两个单元间的关联性:设计控制单元时容易影响故障检测效果, 而设计故障检测单元时可能会影响控制效果.解决该问题的方法之一是采用集成设计策略, 一方面可减少设计步骤, 一定程度上降低设计的复杂度[17]; 另一方面, 集成设计可以考虑控制单元和故障检测单元的关联性和相互作用, 即兼顾和平衡控制性能和故障检测性能.此外, 集成设计也有助于在控制器中结合容错特性[18].目前, 集成设计的研究成果主要集中在一维系统[19], 二维系统的相关研究成果较少[20]. FM模型作为一类重要的二维系统模型, 其同时故障检测与控制方法具有一定的理论意义和实际应用价值, 但该研究未见相关报道, 这是本文的研究动机之一.
本文研究二维FM系统的同时故障检测与控制问题, 采用有限频性能指标刻画故障和干扰信号的有限频特性, 提出构造切平面方法和两步算法来解决设计过程中出现的非凸问题.本文所设计的故障检测滤波器/控制器可以同时实现控制功能和故障检测功能.此外, 以往研究成果常采用递增的残差评价函数, 故障被排除后容易产生故障误报.本文针对二维系统的故障检测问题, 采用新的残差评价函数, 可降低故障误报率.
1. 系统模型
考虑如下二维离散FM模型[21]:
$$ \begin{align} {\pmb x}({ i} + 1, { j} + 1) = \, & A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j}) +\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j}) +\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j}) \\ \pmb y({ i}, { j}) = \, &C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j}) \\ \pmb z({ i}, { j}) = \, &E{\pmb x}({ i}, { j}) +F_{ u} {\pmb u}({ i}, { j}) \end{align} $$ (1) 其中, $ \pmb x(i, j) \in {\bf R}^n $为状态向量, $ \pmb d(i, j) \in {\bf R}^{{n_d}} $为外部扰动, $ \pmb f(i, j) \in {\bf R}^{{n_f}} $为故障信号, $ \pmb y(i, j) \in {\bf R}^{{n_y}} $为测量输出, $ \pmb z(i, j)\in {\bf R}^{{n_z}} $为被控输出, $ {A_1} $, $ {A_2} $, $ {B_{u1}} $, $ {B_{u2}} $, $ {B_{f1}} $, $ {B_{f2}} $, $ {B_{d1}} $, $ {B_{d2}} $, $ C $, $ {D_d} $, $ {D_f} $, $ E $, $ {F_u} $为已知的具有适当维数的常数矩阵.
注1. 对于FM模型, 由于状态向量$ \pmb x(i+1, j+1) $可以看做$ i $方向上对$ \pmb x(i, j+1) $或者是在$ j $方向上对$ \pmb x(i, j+1) $进行的一步前移运算, 故FM模型需要三个向量来描述[22].
本文目标是构造如下形式的故障检测滤波器/控制器:
$$ \begin{align} \hat{\pmb x}(i + 1, j + 1) = \, &{\hat A_1} \hat{\pmb x}(i, j + 1) + {\hat A_2} {\hat{\pmb x}}(i + 1, j) +\\ & {\hat B_1}\pmb y(i, j + 1) + {\hat B_2}\pmb y(i + 1, j) \\ \pmb u(i, j) = \, & {\hat C_c} \hat{\pmb x}(i, j) \\ \hat{\pmb y}(i, j) = \, & {\hat C_0} \hat{\pmb x}(i, j) \end{align} $$ (2) 其中, $ \hat{\pmb x}(i, j) \in {\bf R}^n $为状态估计, $ \pmb u(i, j) \in{\bf R}^{{n_u}} $为控制输入, $ \hat{\pmb y}(i, j) \in {\bf R}^{{n_y}} $是对输出的估计, $ {\hat A_1} $, $ {\hat A_2} $, $ {\hat B_1} $, $ {\hat B_2} $, $ {\hat C_0} $, $ {\hat C_c} $是待定的滤波器和控制器参数.
定义$ \bar{\pmb x}(i, j) = \left[{\begin{array}{*{20}{c}} {{\pmb x^{\rm T}(i, j)}}&{ \hat{\pmb x}^{\rm T}(i, j)}\end{array}}\right] ^{\rm T} $, 及残差信号$ \tilde{\pmb y}(i, j) = \pmb y(i, j) - \hat{\pmb y}(i, j), $结合式(1)和式(2)可得增广系统:
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, & {\bar A_1}\bar{\pmb x}(i, j + 1) + {\bar A_2}\bar{\pmb x}(i+ 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1)+ {\bar B_{d2}}\pmb d(i + 1, j) +\\ & {\bar B_{f1}}\pmb f(i, j + 1)+ {\bar B_{f2}}\pmb f(i + 1, j)\\ \tilde{\pmb y}(i, j) = \, & \tilde C\bar{\pmb x}(i, j) + {\tilde D_d}\pmb d(i, j) + {\tilde D_f}\pmb f(i, j)\\ {\pmb z}(i, j) = \, & \tilde E \bar{\pmb x}(i, j) \end{align} $$ (3) 其中
$$ \begin{align} \, &{\bar A_1} = \left[ {\begin{array}{*{20}{c}} {{A_1}}&{{B_{u1}}{{\hat C}_c}}\\ {{{\hat B}_1}C}&{{{\hat A}_1}} \end{array}} \right], \; {\bar A_2} = \left[ {\begin{array}{*{20}{c}} {{A_2}}&{{B_{u2}}{{\hat C}_c}}\\ {{{\hat B}_2}C}&{{{\hat A}_2}} \end{array}} \right] \\ \, &{\bar B_{d1}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_1}\\ {{{\hat B}_1}{D_d}} \end{array}} \right], \; {\bar B_{d2}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_2}\\ {{{\hat B}_2}{D_d}} \end{array}} \right] \\ \, &{\bar B_{f1}} = \left[ {\begin{array}{*{20}{c}} {{B_{f1}}}\\ {{{\hat B}_1}{D_f}} \end{array}} \right], \; {\bar B_{f2}} = \left[ {\begin{array}{*{20}{c}} {{B_{f2}}}\\ {{{\hat B}_2}{D_f}} \end{array}} \right] \\ \, &\tilde C = [\begin{array}{*{20}{c}} C&{ - {{\hat C}_0}} \end{array}], \; {\tilde D_d} = {D_d} \\ \, &{\tilde D_f} = {D_f}, \; \tilde E = [\begin{array}{*{20}{c}} E&{{F_u}{{\hat C}_c}} \end{array}] \end{align} $$ (4) 2. 问题描述与预备知识
增广系统从故障$ \pmb f(i, j) $、干扰$ \pmb d(i, j) $到残差$ \tilde{\pmb y}(i, j) $和被控输出$ \pmb z(i, j) $的传递函数分别由下式给出:
$$ \begin{align} {G_{\tilde yf}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} -{z_1}{\bar A_2})^{-1}}({z_2}{\bar B_{f1}} +\\ & {z_1}{\bar B_{f2}}) +{\tilde D_f} \end{align} $$ (5) $$ \begin{align} {G_{\tilde yd}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+\\ & {z_1}{\bar B_{d2}}) + {\tilde D_d} \end{align} $$ (6) $$ \begin{align} {G_{zf}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{f1}}+ {z_1}{\bar B_{f2}}) \end{align} $$ (7) $$ \begin{align} {G_{zd}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+ {z_1}{\bar B_{d2}}) \end{align} $$ (8) 其中, $ {z_1} = {{\rm e}^{j\omega_1}} $, $ {z_2} = {{\rm e}^{j\omega_2}} $.
本文要讨论的问题可归纳为:对于给定的二维FM系统, 设计故障检测滤波器/控制器(2), 使增广系统(3)渐近稳定, 同时满足如下控制指标和故障检测指标:
$$ \begin{align} &\inf {\sigma _{\min }}({G_{\tilde yf}}({\omega _1}, {\omega _2})) > {\gamma _1}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (9) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zf}}({\omega _1}, {\omega _2})) < {\beta _1}, \; \forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (10) $$ \begin{align} &\sup {\sigma _{\max }}({G_{\tilde yd}}({\omega _1}, {\omega _2})) < {\gamma _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (11) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zd}}({\omega _1}, {\omega _2})) < {\beta _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (12) 这里, $ {\gamma _1} $, $ {\gamma _2} $, $ {\beta _1} $, $ {\beta _2} $是给定的正标量, $ {\bar \omega _{k1}} $, $ {\bar \omega _{k2}} \in \left[ {0, \pi } \right] $, $ k = 1, 2 $.
注2. 有限频$ {H_ - } $指标(9)和有限频$ {H_\infty} $指标(10)$ \sim $ (12)是相应全频域指标的推广, 当$ {\bar \omega _{11}} = \bar \omega _{12} = \bar \omega _{21} = \bar \omega _{22} = \pi $时, 有限频性能指标退化为全频性能指标.
注3. 式(9)和式(11)为故障检测性能指标, 这两个指标保证了发生在有限频域的故障对残差信号有足够大的影响, 同时外部干扰对残差信号的影响较小; 式(10)和式(12)为控制性能指标, 即抑制故障和干扰信号对被控输出的影响, 保证系统有一定的鲁棒性.
本文需要用到如下引理:
引理 1[23]. 对于给定的对称矩阵$ \Psi $和矩阵$ \Gamma $, $ \Lambda $, 存在矩阵$ X $, 满足$ \Psi + \Gamma X{\Lambda ^{\rm T}} + \Lambda {X^{\rm T}}\Gamma < 0 $, 当且仅当以下等式成立:
$$ \begin{align} {\Gamma ^ \bot }\Psi {\Gamma ^ \bot }^{\rm T} < 0 , {\Lambda ^ \bot }\Psi {\Lambda ^ \bot }^{\rm T} < 0 \end{align} $$ 引理 2[24]. 假设$ \pmb \xi \in {\bf R}^n $, $ P = {P^{\rm T}} \in {\bf R}^{n \times n} $, $ H \in {\bf R}^{m \times n} $, rank$ (H) = r < n $, 则下列命题等价:
i) $ {\pmb \xi ^{\rm T}}P\pmb \xi < 0, \; \; \forall H\pmb \xi = 0, \pmb \xi \ne 0 $
ii) $ \exists X\in {\bf R}^{n \times m}, \; \; P + X^{\rm T}H^{\rm T} + H {X} < 0 $
引理 3[25]. 对于增广系统(3), 假设存在条件$ \det ({z_1}{z_2}I - $ $ {z_2}{\bar A_1}-{z_1}{\bar A_2})^{- 1}\ne 0 $, $ \forall \left({{z_1}, {z_2}} \right) \in \Big\{ {\left( {{z_1}, {z_2}} \right) \in {{\bf C} \times {\bf {C}}}:\left| {{z_1}} \right| \ge 1, \left| {{z_2}} \right| \ge 1} \Big\} $, 给定对称矩阵$ {\Theta} $和标量$ {\bar \omega _1}, $ $ {\bar \omega _2} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {P_k}, $ $ {Q_k}>0 \in{ {{\bf {C}}}^{n \times n}} $, $ k = 1, 2 $, 使得下式成立:
$$ \begin{align} {\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right]^{\rm T}}{\Sigma}\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right] + {\Theta}< 0 \end{align} $$ (13) 其中
$$ \begin{equation} \begin{aligned} \bar A & = \left[ {{{\bar A}_1}, {{\bar A}_2}} \right], {\Sigma } = \left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\\ P& = {P_1} + {P_2}, Q = \left[ {\begin{array}{*{20}{c}} {Q_1}&{Q_2} \end{array}} \right], {\bar B_f} = \left[ {\begin{array}{*{20}{c}} {\bar B_{f1}}&{\bar B_{f2}} \end{array}} \right]\\ \Delta& = {\rm diag}\left\{{-{P_1}-2\cos{{\bar\omega}_1}{Q_1}, -{P_2}- 2\cos{{\bar\omega}_2}{Q_2}} \right\}\\ \bar C & = {\rm diag}\left\{ {\tilde C, \tilde C} \right\}, {\bar D_f} = {\rm diag}\left\{ {{{\tilde D}_f}, {{\tilde D}_f}} \right\} \end{aligned} \end{equation} $$ (14) 则下面的有限频条件成立:
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]^{\rm T} {\Theta} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right] < 0, \; \forall ({\omega _1}, {\omega _2}) \in \Omega \end{equation} $$ (15) 其中
$$ \begin{equation} \begin{aligned} &\bar G\left( {{\omega _1}, {\omega _2}} \right) = {\left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}G\left( {{\omega _1}, {\omega _2}} \right)}\\ {{{\rm e}^{{\rm j}{\omega _1}}}G\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]}\\ &I\left( {{\omega _1}, {\omega _2}} \right) = \left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}{I}}\\ {{{\rm e}^{{\rm j}{\omega _1}}}{I}} \end{array}} \right]\\ &G({\omega _1}, {\omega _2}) = ({{\rm e}^{{\rm j}({\omega _1} + {\omega _2})}}{I_n} - {{\rm e}^{{\rm j}{\omega _2}}}{{\bar A_1}}-\\ &\qquad \qquad {{\rm e}^{{\rm j}{\omega _1}}}{\bar A_2})^{ - 1}({{\rm e}^{{\rm j}{\omega _2}}}{\bar B_{f1}} + {{\rm e}^{{\rm j}{\omega _1}}}{\bar B_{f2}})\\ &\Omega = \left[ { - {{\bar \omega }_1}, {{\bar \omega }_1}} \right] \times \left[ { - {{\bar \omega }_2}, {{\bar \omega }_2}} \right] \end{aligned} \end{equation} $$ (16) 引理 4[26]. 若存在正定矩阵$ P_{s1}, P_{s2} $使得下式成立
$$ \begin{equation} {\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right]^{\rm T}}\left[ {\begin{array}{*{20}{c}} P_s&0\\ 0&{{\rm diag}\left\{ { - {P_{s1}}, - {P_{s2}} }\right\}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right] < 0 \end{equation} $$ (17) 则增广系统(3)渐近稳定, 其中$ P_s = P_{s1}+P_{s2} $.
3. 主要结果
定理 1. 给定标量$ {\bar \omega _{11}} $, $ {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, $ {\gamma _1} > 0 $, $ \alpha > 0 $, 如果存在对称矩阵$ {P_{k1}} $, $ {P_{k3}} $, $ {Q_{k1}} $, $ {Q_{k3}} $和矩阵$ {P_{k2}} $, $ {Q_{k2}} $, $ k = 1, 2 $, $ {G_1} $, $ {G_2} $, $ {G_3} $, $ {F_1} $, $ {F_2} $, $ {F_3} $, $ {F_4} $, $ {H_1} $, $ {H_2} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
$$ \begin{equation} {\alpha ^2} - {\hat C_0}T < 0 \end{equation} $$ (18) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{Q_{k1}}}&{{Q_{k2}}}\\ {Q_{k2}^{\rm T}}&{{Q_{k3}}} \end{array}} \right] > 0, \quad k = 1, 2 \end{equation} $$ (19) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{\gamma _{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{\gamma _{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation} $$ (20) 其中
$$ \begin{align*} {\gamma _{11}} = \, & {P_{11}}+{P_{21}} - {G_1} - G_1^{\rm T}\\ {\gamma _{12}} = \, & {P_{12}}+{P_{22}} - {G_3} - G_2^{\rm T}\\ {\gamma _{13}} = \, & {Q_{11}} + {G_1}{A_1} + {\tilde B_1}C- F_1^{\rm T}\\ {\gamma _{14}} = \, & {Q_{12}} + {G_1}{B_{u1}}{\hat C_c} + {\tilde A_1}- F_2^{\rm T}\\ {\gamma _{15}} = \, & {Q_{21}} + {G_1}{A_2} + {\tilde B_2}C- F_3^{\rm T}\nonumber\\ {\gamma _{16}} = \, & {Q_{22}} + {G_1}{B_{u2}}{\hat C_c} + {\tilde A_2}- F_4^{\rm T}\\ {\gamma _{17}} = \, & {G_1}{B_{f1}} + {\tilde B_1}{D_f} -H_1^{\rm T}\nonumber\\ {\gamma _{18}} = \, & {G_1}{B_{f2}} + {\tilde B_2}{D_f} -H_2^{\rm T}\nonumber\\ {\gamma _{22}} = \, & {P_{13}}+{P_{23}} - {G_3} - G_3^{\rm T}\\ {\gamma _{23}} = \, & Q_{12}^{\rm T} -G_{3}^{\rm T}+ {G_2}{A_1} + {\tilde B_1}C\nonumber\\ {\gamma _{24}} = \, & {Q_{13}}-{G_{3}^{\rm T}}+{G_2}{B_{u2}}{\hat C_c} +{\tilde A_1}\\ {\gamma _{25}} = \, & Q_{22}^{\rm T} -{G_{3}^{\rm T}}+ {G_2}{A_2} + {\tilde B_2}C\\ {\gamma_{26}} = \, & {G_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {Q_{23}}-G_3^{\rm T} \end{align*} $$ $$ \begin{align} {\gamma _{27}} = \, & {G_2}{B_{f1}} + {\tilde B_1}{D_f}\\ {\gamma _{28}} = \, & {G_2}{B_{f2}} + {\tilde B_2}{D_f}\\ {\gamma_{33}} = \, & - {P_{11}} - 2\cos {\bar\omega _{11}}{Q_{11}} - {C^{\rm T}}C+\\ & {F_1}{A_1} + {\tilde B_1}C + {({F_1}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{34}} = \, & - {P_{12}} - 2\cos {\bar\omega _{12}}{Q_{12}} - {C^{\rm T}}{\hat C_0}+\\ & ({F_1}{B_{u1}}{\hat C_c} + {\tilde A_1}) + {({F_2}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{35}} = \, & {({F_3}{A_1} + {\tilde B_1}C)^{\rm T}} + {F_1}{A_2} + {\tilde B_2}C\\ {\gamma _{36}} = \, & {F_1}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{A_1} + {\tilde B_1}C)^{\rm T}} \\ {\gamma _{37}} = \, &{F_1}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_1})^{\rm T}} -{{C}^{\rm T}}{D_f}\\ {\gamma _{38}} = \, &{F_1}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{A_1})^{\rm T}}\\ {\gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar\omega_{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - {\alpha ^2}I \\ {\gamma _{45}} = \, & ({F_2}{A_2} + {\tilde B_2}C) + {({F_3}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}}\\ {\gamma _{46}} = \, &{F_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} \\ {\gamma _{47}} = \, & {F_2}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u1}}{\hat C_c})^{\rm T}} + {{\hat C_0}^{\rm T}}{D_f} \\ {\gamma _{48}} = \, & {F_2}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u1}}{\hat C_c})^{\rm T}} \\ {\gamma _{55}} = \, & - {P_{21}} - 2\cos {\bar\omega _{11}}{Q_{21}} + {F_3}{A_2} + {\tilde B_2}C +\\ & {({F_3}{A_2} + {\tilde B_2}C)^{\rm T}} - {C^{\rm T}}C \\ {\gamma _{56}} = \, & - {P_{22}} - 2\cos {\bar\omega _{12}}{Q_{22}} + {F_3}{B_{u2}}{\hat C_c}+ {\tilde A_2}+\\ & {C^{\rm T}}{\hat C_0} + {({F_4}{A_2} + {\tilde B_2}C)^{\rm T}} \\ {\gamma _{57}} = \, & {F_3}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_2})^{\rm T}} \\ {\gamma _{58}} = \, & {F_3}{B_{f2}} + {({H_2}{A_2})^{\rm T}} + {\tilde B_2}{D_f} - {{C}^{\rm T}}{D_f}\\ {\gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar\omega _{12}}{Q_{23}} - {{\alpha ^2}I } + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}, \\ {\gamma _{67}} = \, & {F_4}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u2}}{\hat C_c})^{\rm T}}\\ {\gamma _{68}} = \, &{F_4}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u2}}{\hat C_c})^{\rm T}} + {{\hat C_0}}{D_f} \\ {\gamma _{77}} = \, & {H_1}{B_{f1}} + {({H_1}{B_{f1}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \\ {\gamma _{78}} = \, & {H_1}{B_{f2}} + {({H_2}{B_{f1}})^{\rm T}}\\ {\gamma _{88}} = \, & {H_2}{B_{f2}} + {({H_2}{B_{f2}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \end{align} $$ (21) 证明. 令式(13)中的
$$ \begin{equation*} \begin{aligned} \Theta = \, &\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} {-I}&0\\ 0&{\gamma _1}^2I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 则有限频条件(15)等价于$ {{G^{\rm T}}_{\tilde yf}}({\omega _1}, {\omega _2}){G}_{\tilde yf}({\omega _1}, {\omega _2})>{\gamma _1}^2I $, 即性能指标(9).由引理3知, 若式(13)成立, 则增广系统(3) $满足性能指标(9).式(13)可改写为
$$ \begin{equation} \begin{aligned} {\Lambda^{\rm T}}\Omega \ {\Lambda } < 0 \end{aligned} \end{equation} $$ (22) 其中
$$ \begin{align*} \Lambda = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_f^{\rm T}}&0&I \end{array}} \right]^{\rm T} \end{align*} $$ $$ \begin{align*} \Omega = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_f^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { - I}&0\\ *&{{\gamma _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_f}}\\ 0&0&I \end{array}} \right] \end{align*} $$ 令
$$ \begin{equation*} \Gamma = \left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_f}} \end{array}} \right]^{\rm T}, \quad \pmb \eta = \Lambda \pmb \xi \end{equation*} $$ 则有$ {\Gamma ^{{\rm T}}}\pmb \eta = {\Gamma ^{{\rm T}}}\Lambda \pmb \xi = 0 $.根据引理2, 若以下不等式成立:
$$ \begin{equation*} \Omega + \Gamma {\rm X} + {{\rm X}^{\rm T}}{\Gamma ^{\rm T}} < 0 \end{equation*} $$ 则式(22)成立.取$ {X} = \left[ {\begin{array}{*{20}{c}} {{G^{\rm T}}}&{{F^{\rm T}}}&{{H^{\rm T}}} \end{array}} \right] $,
$$ \begin{equation*} \begin{aligned} G = \left[ {\begin{array}{*{20}{c}} {{G_1}}&{{G_3}}\\ {{G_2}}&{{G_3}} \end{array}} \right], F = \left[ {\begin{array}{*{20}{c}} {{F_1}}&{{G_3}}\\ {{F_2}}&{{G_3}}\\ {{F_3}}&{{G_3}}\\ {{F_4}}&{{G_3}} \end{array}} \right], H = \left[ {\begin{array}{*{20}{c}} {{H_1}}&0\\ {{H_2}}&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 并将式(4)中相关矩阵代入, 可得
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{{\tilde \gamma }_{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{{\tilde \gamma }_{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation*} $$ 其中
$$ \begin{equation*} \begin{aligned} {\tilde \gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar \omega _{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - \hat C_0^{\rm T}{\hat C_0}\\ {\tilde \gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar \omega _{12}}{Q_{23}} -{\hat C_0}^{\rm T}{\hat C_0} + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}\\ \end{aligned} \end{equation*} $$ 其他参数在式(21)中给出.需要注意的是$ {\tilde \gamma _{44}} $、$ {\tilde \gamma _{66}} $中存在耦合项$ \hat C_0^{\rm T}{\hat C_0} $.下面采用文献[27]中提出的方法, 给出处理耦合项的方案.假设$ {\hat C_0} $为行向量, 首先给出$ \hat C_0^{\rm T}{\hat C_0} $的上界, 即
$$ \begin{equation} \hat C_0^{\rm T}{\hat C_0} > {\alpha ^2}I \end{equation} $$ (23) 上式表明$ {\hat C_0} $的可行解是非凸的, 令
$$ {\hat C_0}T - {\left\| T \right\|_2}^2 = 0 $$ 其中, $ {\left\| T \right\|_2} = \alpha $表示半径为$ \alpha $的球的切平面, 则通过约束条件(18)即可找到式(23)的解的凸子集.由引理3可知, 若式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
注4. 该方法需要假设$ {\hat C_0} $为行向量, 即系统为单输入, 具有一定的局限性.
接下来考虑系统故障检测的鲁棒性条件.令$ \pmb f(i, j) = 0 $, 则增广系统变为
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, &{\bar A_1}\pmb x(i, j + 1) + {\bar A_2} \pmb x(i + 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1) + {\bar B_{d2}}\pmb d(i + 1, j) \end{align} $$ (24) 下面定理给出增广系统(3)满足性能指标(11)的充分条件.
定理 2. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\gamma_2}>0 $, 如果存在对称矩阵$ {P_{m1}} $, $ {P_{m2}} $, $ {Q_{m1}>0} $, $ {Q_{m2}}>0 $, 矩阵$ {M_1} $, $ {M_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(25)成立, 则增广系统(3)满足性能指标(11).
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\Gamma _{11}}}&{{\Gamma _{12}}}&{{\Gamma _{13}}}&0\\ *&{{\Delta _m}}&0&{{\Gamma _{24}}}\\ *&*&{ - {\gamma _2}^2I}&{{\Gamma _{34}}}\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation*} $$ (25) 其中
$$ \begin{equation*} \begin{aligned} \Gamma _{11} = \, & {P_{m1}} + {P_{m2}} - He\left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right]\\ {\Gamma _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {{\Gamma_{m1}}}&{{\Gamma_{m2}}} \end{array}} \right]\\ {{\Gamma_{m1}}} = \, &\left[\begin{array}{cc} {{M_1}{A_1} + {{\tilde B}_1}C}&{{M_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{M_2}{A_1} + {{\tilde B}_1}C}&{{M_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Gamma_{m2}}} = \, &\left[\begin{array}{cc} {{M_1}{A_2} + {{\tilde B}_2}C}&{{M_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{M_2}{A_2} + {{\tilde B}_2}C}&{{M_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right]\\ \Gamma _{13} = \, &\left[ {\begin{array}{*{20}{c}} {{M_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{M_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right]\\ {\Gamma _{24}} = \, &\left[ {\begin{array}{*{20}{c}} {{C^{\rm T}}}&0\\ { - {{\hat C}_0}^{\rm T}}&0\\ 0&{{C^{\rm T}}}\\ 0&{ - {{\hat C}_0}^{\rm T}} \end{array}} \right], {\Gamma _{34}} = {\rm diag}\left\{ {{{\tilde D}_d}, {{\tilde D}_d}} \right\} \end{aligned} \end{equation*} $$ 证明. 由引理3知, 若存在矩阵
$$ \begin{align*} {P_m} = \, & {P_{m1}} + {P_{m2}}, {Q_m} = \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}}\end{array}}\right], \\ {\Delta _m} = \, & {\rm diag}\Big\{ - {P_{m1}} - 2\cos {{\bar \omega }_{21}}{Q_{m1}}, - {P_{m2}} - \\& 2\cos {{\bar \omega }_{22}}{Q_{m2}} \Big\} \end{align*} $$ 使如下不等式成立:
$$ \begin{equation*} \begin{aligned} &\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]<0 \end{aligned} \end{equation*} $$ 则增广系统(3)满足性能指标(11).上式可改写为
$$ \begin{equation} {{\Upsilon} ^{\rm T}}{\Omega_1} {\Upsilon } < 0 \end{equation} $$ (26) 其中
$$ \begin{equation*} \begin{aligned} \Upsilon = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right]^{\rm T}\\ {\Omega_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_d^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ *&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_d}}\\ 0&0&I \end{array}} \right]\\ {\bar B_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar B}_{d1}}}&{{{\bar B}_{d2}}} \end{array}} \right]\\ {\bar D_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\tilde D}_d}}&0\\ 0&{{{\tilde D}_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \Gamma_m = {\left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_d}} \end{array}} \right]}^{\rm T} \end{equation*} $$ 则$ {{\Gamma_m}^ \bot } = \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right] $.根据引理1, 下式与式(26)等价,
$$ \begin{equation*} {\Omega_1}+ He\left( {\Gamma_m {M^{\rm T}}{Z ^{\rm T}}} \right) < 0 \end{equation*} $$ (27) 取$ Z = \left[ {\begin{array}{*{20}{c}} I&0&0 \end{array}} \right]^{\rm T} $, $ M = \left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right] $, 并令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 利用Schur $补引理可证.
定理 3. 给定标量$ {\bar \omega_{11}} $, $ {\bar\omega_{12}}\in\left[{0, \pi}\right] $, $ {\beta _1} > 0 $, 如果存在对称矩阵$ {P_{r1}} $, $ {P_{r2}} $, $ {Q_{r1}>0} $, $ {Q_{r2}>0} $, 矩阵$ {R_1} $, $ {R_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(26)成立, 则增广系统(3)满足性能指标(10).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Xi _{11}}}&{{\Xi _{12}}}&{{\Xi _{13}}}&0\\ *&{{\Delta _r}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta_1^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (28) 其中
$$ \begin{equation*} \begin{aligned} {\Xi _{11}} = \, & {P_{r1}} + {P_{r2}} - He\left[ {\begin{array}{*{20}{c}} {{R_1}}&{{G_3}}\\ {{R_2}}&{{G_3}} \end{array}} \right]\\ {\Xi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{r1}}}&{{Q_{r2}}} \end{array}} \right]+ \left[ {\begin{array}{*{20}{c}} {{\Xi_{r1}}}&{{\Xi_{r2}}} \end{array}} \right]\\ {{\Xi_{r1}}} = \, &\left[\begin{array}{cc} {{R_1}{A_1} + {{\tilde B}_1}C}&{{R_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{R_2}{A_1} + {{\tilde B}_1}C}&{{R_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Xi_{r2}}} = \, &\left[\begin{array}{cc} {{R_1}{A_2} + {{\tilde B}_2}C}&{{R_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{R_2}{A_2} + {{\tilde B}_2}C}&{{R_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Xi _{13}} = \, &\left[ {\begin{array}{*{20}{c}} {{R_1}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_1}{B_{f2}} + {{\tilde B}_2}{D_f}}\\ {{R_2}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_2}{B_{f2}} + {{\tilde B}_2}{D_f}} \end{array}} \right]\\ {\Xi _{24}} = \, & \left[ {\begin{array}{*{20}{c}} {{E^{\rm T}}}&0\\ { ({F_u}\hat C_c)^{\rm T}}&0\\ 0&{{E^{\rm T}}}\\ 0&{ ({F_u}\hat C_c)^{\rm T}} \end{array}} \right]\end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _r} = {\rm diag}\{ { - {P_{r1}} - 2\cos {{\bar \omega }_{11}}{Q_{r1}}, - {P_{r2}} - 2\cos {{\bar \omega }_{12}}{Q_{r2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理 4. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\beta _2} > 0 $, 如果存在对称矩阵$ {P_{u1}} $, $ {P_{u2}} $, $ {Q_{u1}>0} $, $ {Q_{u2}}>0 $, 矩阵$ {U_1} $, $ {U_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(27)成立, 则增广系统$ (3)满足性能指标(12).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Omega _{11}}}&{{\Omega _{12}}}&{{\Omega _{13}}}&0\\ *&{{\Delta _u}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta _2^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (29) 其中
$$ \begin{equation*} \begin{aligned} {\Omega _{11}} = \, & {P_{u1}} + {P_{u2}} - He\left[ {\begin{array}{*{20}{c}} {{U_1}}&{{G_3}}\\ {{U_2}}&{{G_3}} \end{array}} \right]\\ {\Omega _{12}} = \, &\left[ {\begin{array}{*{20}{c}} {{Q_{u1}}}&{{Q_{u2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {\Omega _{u1}}&{\Omega _{u2}} \end{array}} \right]\\ {\Omega _{u1}} = \, &\left[\begin{array}{cc} {{U_1}{A_1} + {{\tilde B}_1}C}&{{U_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{U_2}{A_1} + {{\tilde B}_1}C}&{{U_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {\Omega _{u2}} = \, &\left[\begin{array}{cc} {{U_1}{A_2} + {{\tilde B}_2}C}&{{U_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{U_2}{A_2} + {{\tilde B}_2}C}&{{U_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Omega _{13}} = \, & \left[ {\begin{array}{*{20}{c}} {{U_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{U_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _u} = {\rm diag}\{ { - {P_{u1}} - 2\cos {{\bar \omega }_{21}}{Q_{u1}}, - {P_{u2}} - 2\cos {{\bar \omega }_{22}}{Q_{u2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理1~4给出了故障检测滤波器/控制器设计需满足的有限频域性能条件, 由于广义KYP引理并不隐含系统的稳定性[28], 因此这些条件并不能保证所设计的系统是稳定的.下面给出增广系统(3)渐近稳定的充分条件:
定理 5. 如果存在正定矩阵$ { P_{s1}} $, $ { P_{s2}} $, 矩阵$ {S_1} $, $ {S_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $使不等式(28)成立, 则增广系统(3)渐近稳定.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Psi _{11}}}&{{\Psi _{12}}}\\ *&{{\Psi _{22}}} \end{array}} \right] < 0 \end{equation} $$ (30) 其中
$$ \begin{equation*} \begin{aligned} {\Psi _{11}} = \, & { P_{s1}} + { P_{s2}} - \left[ {\begin{array}{*{20}{c}} {{S_1} + S_1^{\rm T}}&{{G_3} + S_2^{\rm T}}\\ {G_3^{\rm T} + {S_2}}&{G_3^{\rm T} + {G_3}} \end{array}} \right]\\ {\Psi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} \Psi _{s1}&\Psi _{s2} \end{array}} \right]\\ \Psi _{s1} = \, & \left[\begin{array}{cc} {{S_1}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_1}{B_{u1}}{\hat C_c}}\\ {{S_2}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_2}{B_{u1}}{\hat C_c}}\\ \end{array}\right]\\ \Psi _{s2} = \, & \left[\begin{array}{cc} {{S_1}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_1}{B_{u2}}{\hat C_c}}\\ {{S_2}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_2}{B_{u2}}{\hat C_c}}\\ \end{array}\right] \nonumber\\ {\Psi _{22}} = \, & {\rm diag}\{ { - {{ P}_{s1}}, - {{ P}_{s2}}} \}\end{aligned} \end{equation*} $$ 证明. 由引理4及引理1易证.
4. 解决方案
4.1 算法
上述定理中得到的矩阵不等式为非凸的, 为了解决该难题, 采取两步算法进行求解:
步骤1. 设计状态反馈控制器, 使闭环系统(32)满足控制性能指标(10)和(12), 得到控制器参数$ {\hat C_c} $.
设计如下形式的状态反馈控制器:
$$ \begin{equation} \pmb u(i, j) = {\hat C_c}\pmb x(i, j) \end{equation} $$ (31) 可得闭环系统:
$$ \begin{align} \pmb x(i + 1, j + 1) = \, &({A_1} + {B_{u1}}{{\hat C}_c})\pmb x(i, j + 1) +\\ & ({A_2} + {B_{u2}}{{\hat C}_c})\pmb x(i + 1, j)+\\ & {B_{d1}}\pmb d(i, j + 1) + {B_{d2}}\pmb d(i + 1, j)+\\ & {B_{f1}}\pmb f(i, j + 1) + {B_{f2}}\pmb f(i + 1, j)\\ \pmb z(i, j) = \, &(E + {F_u}{{\hat C}_c})\pmb x(i, j)+{F_f}\pmb f(i , j) \end{align} $$ (32) 定义矩阵
$$ \begin{equation*} \begin{aligned} \hat A = \, & \left[ {\begin{array}{*{20}{c}} {{A_1} + {B_{u1}}{{\hat C}_c}}&{{A_2} + {B_{u2}}{{\hat C}_c}} \end{array}} \right] = \left[ {{\hat A_{1}}, {\hat A_{2}}} \right]\\ F_f = \, &0, \hat F_f = \left[ {\begin{array}{*{20}{c}} {F_f}&0\\ 0&{F_f} \end{array}} \right] \\\hat E = \, & \left[ {\begin{array}{*{20}{c}} {E + {F_u}{{\hat C}_c}}&0\\ 0&{E + {F_u}{{\hat C}_c}} \end{array}} \right], {\hat B_f} = \left[ {{B_{f1}}, {B_{f2}}} \right]\end{aligned} \end{equation*} $$ 定理 6. 给定标量$ {\beta _1} > 0 $, $ {\bar \omega _{11}}, {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\bar P_1} $, $ {\bar P_2} $及$ {\bar Q_1}>0 $, $ {\bar Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(31)成立, 则系统(32) $满足性能指标(10).此外, 若式(31)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Phi _{11}}}&{{\Phi _{12}}}&{{\Phi _{13}}}&{{\Phi _{14}}}&{{\Phi _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Phi _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Phi _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi _{34}}}&{{\Phi _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Phi _{44}}}&{{\Phi _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Phi _{55}}}&{{\Phi _{56}}}&{{\Phi _{57}}}\\ *&*&*&*&*&{{\Phi _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Phi _{77}}} \end{array}} \right] < 0 \end{equation} $$ (33) 其中
$$ \begin{align*} {\Phi _{11}} = \, & {\bar P_1} + {\bar P_2}- {X} - X^{\rm T} , {\Phi _{12}} = {\bar Q_1}\\ {\Phi _{13}} = \, & - V_{1}^{\rm T}, {\Phi _{14}} = 0\\ {\Phi _{15}} = \, & {({A_1}{X} +{B_{f1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\bar {Q_2}} \\ {\Phi _{16}} = \, &{({EX + {F_u}Y})^{\rm T}}, \Phi_{17} = 0, \\ {\Phi _{22}} = \, & -\bar P_1-2\cos{\bar \omega_{11}} \bar Q_1-X-X^{\rm T}\\ \Phi_{23} = \, &0, {\Phi _{24}} = - V_{5}^{\rm T}\\ {\Phi _{25}} = \, & {({A_2}{X} + {B_{f2}}{V_5} +{B_{u2}}{Y})^{\rm T}}, \Phi_{26} = 0\\ {\Phi _{27}} = \, & {({EX + {F_u}Y})^{\rm T}}, {\Phi _{33}} = I- {V_{2}} - {V_{2}}^{\rm T} \end{align*} $$ $$ \begin{align*} \Phi_{34} = \, &0, {\Phi _{35}} = -{V_{3}} + (B_{f1}V_2)^{\rm T}, \Phi_{36} = 0 \\ {\Phi _{37}} = \, & - {V_{4}}, {\Phi _{44}} = I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Phi _{45}} = \, &{({B_{f2}}{V_{6}})^{\rm T}}, {\Phi _{46}} = - {V_{7}} , \Phi_{47} = 0\\ {\Phi _{55}} = \, &-\bar{P_2}-2\cos\bar{\omega}_{12}\bar{Q}_2+B_{f1}V_3+(B_{f1}V_3)^{\rm T}\\ {\Phi _{56}} = \, & {B_{f2}}{V_{7}}, {\Phi _{57}} = {B_{f1}}{V_{4}}, {\Phi _{66}} = - \beta _1^2I\\ \Phi_{67} = \, &0, {\Phi _{77}} = - \beta _1^2I \end{align*} $$ 证明. 根据广义KYP引理的对偶形式, 若下式
$$ \begin{align} &\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]^{\rm T}+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]^{\rm T}<0 \end{align} $$ (34) 成立, 则系统(32)满足性能指标(10).式(34)可写为
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}{\left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right]^{\rm T}} < 0 \end{equation} $$ (35) 其中
$$ \begin{equation*} \begin{aligned} K = \, &\left[{\begin{array}{*{20}{c}} I&0&0&0&0&0&0\\ 0&I&0&0&0&0&0\\ 0&0&0&I&0&0&0\\ 0&0&0&0&I&0&0\\ 0&0&I&0&0&0&0\\ 0&0&0&0&0&I&0\\ 0&0&0&0&0&0&I \end{array}} \right]\\ \Sigma_1 = \, &\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right], \Pi_1 = \left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\\ S = \, &\left[ {\begin{array}{*{20}{c}} {\hat A}&{{{\hat B}_f}}\\ {\hat E}&{0} \end{array}} \right] = \\ \, & \left[ {\begin{array}{*{20}{c}} {A_1}&{A_{2}}&{B_{f1}}&{B_f}\\E&0&0&0\\0&E&0&0 \end{array}} \right]+\\ &\left[ {\begin{array}{*{20}{c}} {B_{u1}}&{B_{u2}}\\{F_{u}}&{0}\\0&{F_u} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} {\hat C_c}&{0}\\{0}&{\hat C_c} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] = \\ \, &\mathscr{A}+\mathscr{B}L\mathscr{C}\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {X_1} = {\{{\mathscr{C}}^\dagger XR+(I-{\mathscr{C}^ \dagger}\mathscr{C})V\} } , \quad Y = {\hat C_c}X \end{aligned} \end{equation*} $$ 则
$$ \begin{equation*} \begin{aligned} SX_1 = \mathscr{A}X_1+\mathscr{B}YR \end{aligned} \end{equation*} $$ 由于$ \mathscr{C} = \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] $, 故$ \mathscr{C}^\dagger = \left[ {\begin{array}{*{20}{c}} I&0\\0&I\\0&0\\0&0 \end{array}} \right] $, 因此可得
$$ \begin{equation*} \begin{aligned} {X_1} = \, &\left[ {\begin{array}{*{20}{c}} {XR_1}\\ {XR_2} \\{ V_a}\\{ V_b} \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {P_1} = K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}, H_1 = \begin{bmatrix} -I\\S \end{bmatrix}, $ $ H_1^ \bot = \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] $, 式(35)可改写为
$$ \begin{equation*} {P_1} + He({H_1}{X_1}) < 0 \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {R_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0&0&0&0&0&0 \end{array}} \right]\\ {R_2} = \, &\left[ {\begin{array}{*{20}{c}} 0&I&0&0&0&0&0 \end{array}} \right]\\ V_a = \, &\begin{bmatrix} V_1&0&V_2&0&V_3&0&V_4 \end{bmatrix}\\ V_b = \, &\begin{bmatrix} 0&V_5&0&V_6&0&V_7&0 \end{bmatrix} \end{aligned} \end{equation*} $$ 代入可得式(33).此外, 若式(33)成立, 易知$ X $可逆, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
定理 7. 给定标量$ {\beta _2} > 0 $, $ {\bar \omega _{21}}, {\bar \omega _{22}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\tilde P_1} $, $ {\tilde P_2} $及$ {\tilde Q_1}>0 $, $ {\tilde Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(36)成立, 则系统(32) $满足性能指标(12).此外, 若式(36)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Sigma _{11}}}&{{\Sigma _{12}}}&{{\Phi _{13}}}&{{\Sigma _{14}}}&{{\Sigma _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Sigma _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Sigma _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi_{34}}}&{{\Sigma _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Sigma _{44}}}&{{\Sigma _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Sigma _{55}}}&{{\Sigma _{56}}}&{{\Sigma _{57}}}\\ *&*&*&*&*&{{\Sigma _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Sigma _{77}}} \end{array}} \right] < 0 \end{equation} $$ (36) 其中
$$ \begin{equation*} \begin{aligned} {\Sigma _{11}} = \, & {\tilde P_1} + {\tilde P_2}- {X} - X^{\rm T} , {\Sigma _{12}} = {\tilde Q_1}\\ {\Sigma _{14}} = \, &0 \\ {\Sigma _{15}} = \, & {({A_1}{X} +{B_{d1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\tilde {Q_2}}\\ {\Sigma _{22}} = \, & -{\tilde P_1} -2\cos {\bar \omega _{21}}{\tilde Q_1}- {X} - X^{\rm T} \\ {\Sigma _{25}} = \, & {({A_2}{X} + {B_{d2}}{V_5} +{B_{u2}}{Y})^{\rm T}}\\ {\Sigma _{35}} = \, & -{V_{3}} + ({B_{d1}}{V_2})^{\rm T}\\ {\Sigma _{44}} = \, & I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Sigma _{45}} = \, &{({B_{d2}}{V_{6}})^{\rm T}} \\ {\Sigma _{55}} = \, &-\tilde{P_2}-2\cos\bar{\omega}_{22}\tilde{Q}_2+B_{d1}V_3+(B_{d1}V_3)^{\rm T} \\ {\Sigma _{56}} = \, & {B_{d2}}{V_{7}}, {\Sigma _{57}} = {B_{d1}}{V_{4}}, {\Sigma _{66}} = - \beta _2^2I, {\Sigma _{77}} = - \beta _2^2I \end{aligned} \end{equation*} $$ 证明. 参考定理6证明过程.
通过求解以下优化问题获得控制器参数$ {\hat C_c} $:
$$ \begin{equation*} \begin{aligned} &\min a{\beta _1} + b{\beta _2}\\ &{\rm s.t.}\;\;(33), (36) \end{aligned} \end{equation*} $$ (37) 给定实参数$ a $, $ b $, 若上述优化问题可解, 则控制器参数$ {\hat C_c} = YX^{-1} $.
步骤2. 在步骤1的基础上($ {\hat C_c} $已知), 给定实参数$ {a_1} $, $ {a_2} $, $ {b_1} $, $ {b_2} $, 求解如下的优化问题:
$$ \begin{equation*} \begin{aligned} & \min {a_2}{\gamma _2} + {b_1}{\beta _1} + {b_2}{\beta _2} - {a_1}{\gamma _1}\\ &{\rm s.t.}\;(18), (19), (20), (25), (28), (29), (30) \end{aligned} \end{equation*} $$ 若上述优化问题可解, 则可得滤波器参数$ \hat A_k = G_3^{-1}\tilde A_k, \hat B_k = G_3^{-1}\tilde B_k, k = 1, 2, {\hat C_0} = {\hat C_0} $.
注5. 与一维系统相比, 二维系统的稳定性条件和性能条件复杂, 其故障检测滤波器/控制器的设计过程更加困难.求解有限频$ {H_ - } $指标时, 一维系统可通过Finsler定理等避免出现非凸问题, 而二维系统由于其广义KYP引理的特殊形式, 需要通过构造切平面方法来解决设计过程中出现的非凸问题.二维系统的状态反馈控制器设计难度也更大, 需利用广义KYP引理的对偶形式进行构造性证明.
4.2 残差评价函数及阈值
受参考文献[29]启发, 选择如下残差评价函数及阈值:
$$ \begin{equation} \begin{aligned} {J_r}(i, j)& = \sqrt{\frac{{\sum\limits_{p = 0}^s {\sum\limits_{q = 0}^t {{r^{\rm T}}}(i-p, j-q)r(i-p, j-q)}}}{{(s+1)(t+1)}}}\\ {J_{th}}& = \mathop{\sup}\limits_{f = 0, d \ne 0} {J_r}(i, j) \end{aligned} \end{equation} $$ (38) 其中, $ {J_r}(i, j) $和$ {J_{th}} $分别表示残差函数及阈值.阈值$ {J_{th}} $可借鉴文献[30]中的算法求出.根据如下的逻辑关系检测系统是否发生了故障:
$$ \begin{array}{l} J\left( {i,j} \right) > {J_{th}} \Rightarrow 系统存在故障 \Rightarrow 报警\\ J\left( {i,j} \right) < {J_{th}} \Rightarrow 系统无故障 \Rightarrow 不报警 \end{array} $$ 注6. 对于二维系统而言, 残差评价函数需要从水平和垂直两个方向定义以反映二维特性.本文选择水平方向$ i-s $到$ i $, 垂直方向$ j-t $$到$ j $的矩形区域内残差的平均值作为评价函数.而对于一维系统, 残差评价函数只需要在一个方向上定义, 其评估窗口通常为$ k_0 $到$ k_0+n $的时间范围.
5. 仿真例子
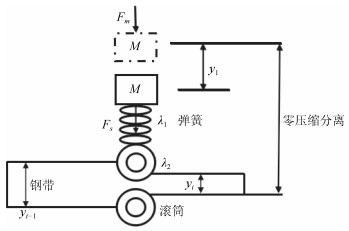
该轧制过程可用如下等式描述:
$$ \begin{equation*} \begin{aligned} \pmb y_{i}(t) = {\frac{\lambda}{\lambda +Mp^2}}\left\{\left(1+\frac{Mp^2}{\lambda_1}\right)\pmb y_{i-1}(t)-{\frac{1}{\lambda_2}}\pmb F_m\right\} \end{aligned} \end{equation*} $$ 其中, $ p $表示微分算子$ {\rm d}/{\rm d}t $, $ \pmb y_i(t) $是第$ i $个实际压辊间隙厚度, $ \pmb F_m $是由电动机产生的力, $ M $是压辊间隙调节机构的总质量, $ \lambda_1 $表示调节机构弹簧, $ \lambda_2 $表示带钢的硬度, $ \lambda = \lambda_1\lambda_2/(\lambda_1+\lambda_2) $是带钢和压辊机构的复合刚度.通过向后差分并用$ T_1 $表示采样周期, 则上式可以用离散时间形式表示:
$$ \begin{equation*} \begin{aligned} \pmb y_i(t+T_1) = \, & c_1\pmb y_i(t)+c_2\pmb y_i(t-T_1)+c_3\pmb y_{i-1}(t+T_1)+\\ & c_4\pmb y_{i-1}(t)+c_5\pmb y_{i-1}(t-T_1)+b \pmb u_{i}(t)\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} c_1 = \, &\frac{2M}{\lambda {T_1}^2+M}, \; c_2 = \frac{-M}{\lambda {T_1}^2+M}\\ c_3 = \, & \frac{\lambda}{\lambda {T_1}^2+M}\left({T_1}^2+\frac{M}{\lambda }\right)\\ c_4 = \, & -\frac{2\lambda M}{\lambda_1(\lambda{T_1}^2+M)}, \; c_5 = \frac{\lambda M}{\lambda_1(\lambda{T_1}^2+M)}\\ b = \, & -\frac{\lambda {T_1}^2}{\lambda_2(\lambda{T_1}^2+M)}\\ \pmb x(i, j): = \, &[\pmb y_{i-1}^{\rm T}((j+1)T_1)\quad \pmb y_{i-1}^{\rm T}(jT_1)\quad \pmb y_{i}^{\rm T}(jT_1)\\ &\pmb y_{i}^{\rm T}((j-1)T_1)\quad \pmb y_{i-1}^{\rm T}((j-1)T_1)]^{\rm T}\\ \pmb u(i, j): = \, &\pmb F_m, \; \pmb y(i, j): = \pmb y_i(jT_1) \end{aligned} \end{equation*} $$ 上述等式可转化为FM模型:
$$ \begin{equation*} \begin{split} {\pmb x}({ i} + 1, { j} + 1) = \, &A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j})+\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j})+\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j})\\ \pmb y({ i}, { j}) = \, & C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j})\\ \pmb z({ i}, { j}) = \, & E{\pmb x}({ i}, { j}) + F_{ u} {\pmb u}({ i}, { j}) \end{split} \end{equation*} $$ 其中
$$ \begin{align*} {A_1}& = \left[ {\begin{array}{*{20}{c}} {c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\ 0&0&1&0&0\\0&0&0&0&0\\0&0&0&0&0\\0&0&0&0&0 \end{array}} \right]\\{A_2}& = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0\\0&0&0&0&0\\{c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\0&0&1&0&0\\0&1&0&0&0 \end{array}} \right]\\ {B_{d1}}& = \left[ {\begin{array}{*{20}{c}} 0.0605\\0.3993\\0.5269\\0.4168\\0.6569 \end{array}} \right], {B_{d2}} = \left[ {\begin{array}{*{20}{c}} 0.6280\\0.2920\\0.4317\\0.0155\\0.9841 \end{array}} \right] \end{align*} $$ $$ \begin{align*} {B_{u1}}& = \left[ {\begin{array}{*{20}{c}} b\\0\\0\\0\\0 \end{array}} \right], {B_{u2}} = \left[ {\begin{array}{*{20}{c}} 0\\0\\b\\0\\0 \end{array}} \right]\\ B_{f1}& = \begin{bmatrix} -1.0414&0&0&0&0 \end{bmatrix}^{\rm T}\\B_{f2}& = \begin{bmatrix} 0&0&-1.0414&0&0 \end{bmatrix}^{\rm T}\\ C& = \begin{bmatrix} 0&0&0&0&0 \end{bmatrix}\\ E& = \left[ {\begin{array}{*{20}{c}} 0&0&{1}&0&0 \end{array}} \right]\\ F_u& = 0.1672, D_f = 1.2, D_d = 0.5 \end{align*} $$ 令$ \lambda_1 = \lambda_2 = 1\, 800, T_1 = 0.8, M = 100 $, 假设上述系统中发生了卡死型传感器故障.利用本文所提出的方法设计故障检测滤波器/控制器, 同时保证一定的故障检测性能和控制性能.给定加权值$ {a_1} = 0.1 $, $ {a_2} = 0.4 $, $ {b_1} = 0.4 $, $ {b_2} = 0.1 $, 由于故障发生在低频段, 取频率约束$ {\bar \omega _{k1}} = {\bar \omega _{k2}} = \pi /12, k = 1, 2 $, 其余参数取为$ T = \left[ {\begin{array}{*{20}{c}} 0.8147&0.9058&0.1270&0.9134&0.6324 \end{array}} \right]^{\rm T} $, $ \alpha = 1.6537 $.根据上节所提出的算法, 可得如下故障检测滤波器/控制器参数:
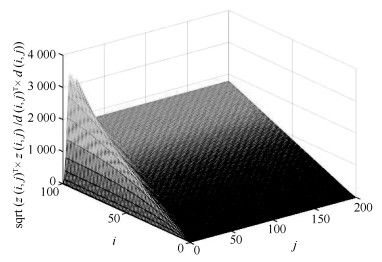
$$ \begin{equation*} \begin{aligned} {\hat A_1} = \, & \left[ {\begin{array}{*{20}{c}} -0.0673&-0.0120&0.0238&-0.0189&0.0103\\ -0.0064&-0.1977&0.0372&0.0114&0.0109\\ 0.0065&0.0130&-0.1643&0.0184&0.0082\\ -0.0037&0.0061&0.0135&-0.1931&0.0030\\ -0.0196&0.0166&0.0128&0.0091&-0.1854\\ \end{array}} \right]\\ {\hat A_2} = \, & \left[ {\begin{array}{*{20}{c}} -0.1618&0&0.0071&-0.0030&0.0026\\ 0.0097&-0.1998&0.0160&0.0041&0.0088\\ 0.0601&0.0040&-0.1529 & 0 & 0.0137\\ 0.0099&0.0047&0.0384&-0.2012&0.0050\\ -0.0148&0.0316&0.0103&0.0077&-0.1892 \end{array}} \right]\\ {\hat B_1} = \, & \left[ {\begin{array}{*{20}{c}} 0.3024\\ -0.0514\\ 0.0357\\ -0.0827\\ -0.0437 \end{array}} \right], {\hat B_2} = \left[ {\begin{array}{*{20}{c}} -0.1311\\ 0.0634\\ 0.2529\\ 0.0884\\ -0.0510 \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} \begin{aligned} {\hat C_c} = \, & \left[ {\begin{array}{*{20}{c}} 556.2519&-81.8249&86.8303&-88.8581&44.4291 \end{array}} \right]\\ {\hat C_0} = \, &\left[ {\begin{array}{*{20}{c}} 1.0215&1.1350&0.1381&1.1477&0.7935 \end{array}} \right] \end{aligned} \end{equation*} $$ 为了验证该故障检测滤波器/控制器的有效性, 给出仿真结果(图 1~4).在仿真中, 考虑卡死型故障
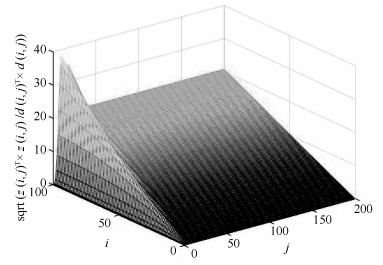
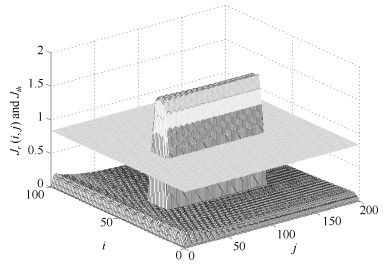 图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space
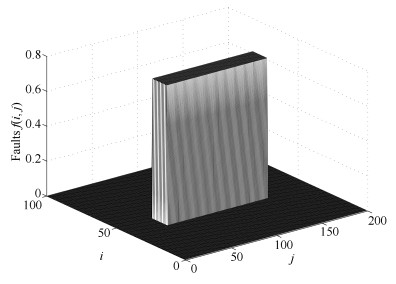
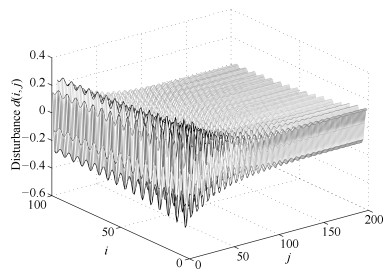
图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space$$ \begin{equation*} \pmb f(i, j) = \begin{cases} 0.8, &40 \le i \le 50, 40 \le j \le 150\\ 0, & \mbox{否则} \end{cases} \end{equation*} $$ 以及干扰
$$ \begin{equation*} \pmb d(i, j) = 0.15{\sin}(i){\rm e}^{-0.02i}+0.3{\cos}(j){\rm e}^{-0.03j} \end{equation*} $$ 系统初始状态设为$ {{\pmb x}_i}(k, 1) = 0 $, $ {\hat {\pmb x}_i}(k, 1) = 0 $, $ {\pmb x_i}(1, k) = 0 $, $ {\hat {\pmb x}_i}(1, k) = 0 $.采用参考文献[30]中的算法, 可得阈值$ {J_{th}} = 0.8251 $. 图 2表示系统的故障, 图 3表示系统干扰, 图 4和图 5分别给出了三维空间和二维空间的故障检测效果.从图 5可以看出, 当$ i = 15, 23, 35 $时, 残差评价函数的值位于阈值的下方, 表明系统没有发生故障; 当$ i = 44 $, $ 40 \le j\le150 $时, 残差评价函数的值位于阈值的上方, 表明此时系统发生了故障, 这与预设的故障一致, 因此该设计可以有效地检测出故障发生.
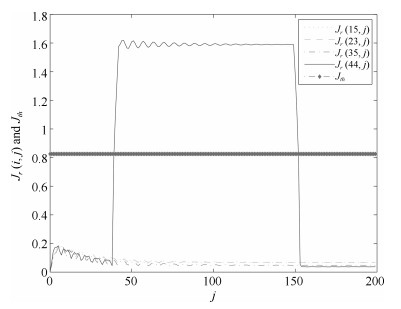 图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space
图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space接下来与传统的分步设计方法[15]进行比较, 仍采用上文中的轧制模型中的数据, 先设计控制器, 再设计故障检测滤波器.在相同条件下进行仿真研究, 仿真结果如图 6~8所示. 图 6为故障到残差传递函数的奇异值比较, 可以看出集成设计方法的故障灵敏性更高(奇异值更大). 图 7和图 8为两种方法的控制性能(即扰动抑制性能)的比较, 可以看出当故障发生时, 本文所提出的集成设计方法具有更好的扰动抑制能力.
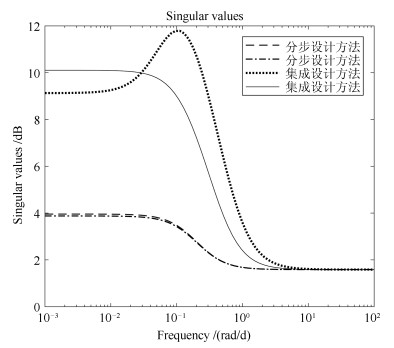 图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal
图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal6. 结论
本文研究了FM模型的同时故障检测与控制问题.借助于二维广义KYP引理, 直接处理系统需要满足的有限频性能指标, 可避免频率加权方法的复杂性.所设计的故障检测滤波器/控制器, 在检测故障发生的同时, 还可以满足给定的控制性能指标.利用构造切平面方法以及两步法来解决设计过程中出现的非凸问题.仿真例子验证了方法的有效性.
-
图 5 不同方法在CIFAR-100任务序列上的分类精度曲线
Fig. 5 Classification accuracy curves of different methods on CIFAR-100 task sequence
表 1 不同类增量学习方法的特性
Table 1 Characteristics of different Class-IL methods
方法 无需多次访问 无需逐层优化 无需数据存储 无需网络扩展 重放 × × × √ 扩展 × × √ × 正则化 × × √ √ MRNet √ √ √ √  下载: 导出CSV
下载: 导出CSV
表 2 连续学习FashionMNIST-10/5任务序列对比实验
Table 2 Comparative experiments on continuously learning FashionMNIST-10/5 task sequence
方法 指标 ACC (%) BWT FWT Time (s) No. Para. (MB) 非CL方法 BLS 19.93±0.22 — — 8.17±0.24 0.25 L2 26.55±6.27 — — 59.12±2.73 1.28 JT ~ 96.61 — — — — CL方法 EWC 34.96±7.62 −0.7248±0.0953 −0.0544±0.0300 69.21±4.10 11.48 MAS 38.54±3.49 −0.4781±0.0561 −0.2576±0.0548 110.26±1.74 3.83 SI 56.19±3.21 −0.3803±0.0631 −0.1329±0.0504 67.67±2.25 5.11 OWM 79.16±1.11 −0.1844±0.0197 −0.0635±0.0078 40.38±7.09 3.18 GEM 81.98±2.80 −0.0586±0.0654 −0.1093±0.0510 45.73±1.17 1.28 PCL 82.13±0.61 −0.1385±0.0413 −0.0647±0.0172 348.75±9.83 1.28 IL2M 84.61±2.95 −0.0712±0.0273 −0.0258±0.0248 44.18±1.34 1.28 MRNet 93.07±0.74 −0.0458±0.0069 −0.0261±0.0035 11.38±0.29 0.83
下载: 导出CSV
表 3 连续学习ImageNet-200任务序列对比实验
Table 3 Comparative experiments on continuously learning ImageNet-200 task sequence
方法 任务序列 ImageNet-200/10 ImageNet-200/50 IL2M 54.13±11.30 47.84±18.85 OWM 55.93±14.29 49.67±20.98 PCL 56.41±9.75 52.46±8.95 MRNet 56.50±9.13 55.93±11.51
下载: 导出CSV
表 4 权衡系数灵敏度分析
Table 4 Sensitivity analysis on the trade-off coefficients
保护程度 评价指标 ${A}_1$ (%) ${A}_2$ (%) ${A}_3$ (%) ${A}_4$ (%) ${A}_5$ (%) BWT FWT 1 84.45 42.88 28.20 20.51 17.45 −0.8420 0.0001 $10^2$ 84.45 75.48 68.57 61.54 55.65 −0.3629 −0.0015 $10^4$ 84.45 82.33 80.90 78.46 77.86 −0.0615 −0.0253 $10^6$ 84.45 71.48 61.37 49.81 41.11 −0.0199 −0.5263 $10^8$ 84.45 44.35 31.05 23.29 18.62 0.0003 −0.8270
下载: 导出CSV
表 5 MRNet结构分析
Table 5 Analysis on MRNet architecture
有无直连 评价指标 ${A}_1$ (%) ${A}_2$ (%) ${A}_3$ (%) ${A}_4$ (%) ${A}_5$ (%) BWT FWT × 98.20 92.58 93.98 93.34 92.61 −0.0199 −0.0560 √ 99.87 34.14 33.83 32.01 28.40 −0.1304 −0.1883
下载: 导出CSV
-
[1] McCloskey M, Cohen N J. Catastrophic interference in connectionist networks: The sequential learning problem. Psychology of Learning and Motivation. Elsevier, 1989. [2] French R M. Catastrophic forgetting in connectionist networks. Trends in Cognitive Sciences, 1999, 3(4): 128-135 doi: 10.1016/S1364-6613(99)01294-2 [3] McClelland J L, McNaughton B L, O'Reilly R C. Why there are complementary learning systems in the hippocampus and neocortex: insights from the successes and failures of connectionist models of learning and memory. Psychological Review, 1995, 102(3): 419-457 doi: 10.1037/0033-295X.102.3.419 [4] Aljundi R, Babiloni F, Elhoseiny M, Rohrbach M, Tuytelaars T. Memory aware synapses: Learning what (not) to forget. In: Proceedings of the European Conference on Computer Vision (ECCV). Munich, Germany: Springer, 2018. 139−154 [5] Li Z Z, Hoiem D. Learning without forgetting. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 40(12): 2935-2947 [6] Parisi G I, Kemker R, Part J L, Kanan C, Wermter S. Continual lifelong learning with neural networks: A review. Neural Networks, 2019, 113: 54-71 doi: 10.1016/j.neunet.2019.01.012 [7] Li Z Z, Hoiem D. A continual learning survey: Defying forgetting in classification tasks. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(7): 3366-3385 [8] Perkonigg M, Hofmanninger J, Herold C J, Brink J A, Pianykh O, Prosch H, et al. Dynamic memory to alleviate catastrophic forgetting in continual learning with medical imaging. Nature Communications, 2021, 12(1): 1-12 doi: 10.1038/s41467-020-20314-w [9] Mallya A, Lazebnik S. Packnet: Adding multiple tasks to a single network by iterative pruning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Salt Lake City, USA: IEEE, 2018. 7765−7773 [10] Rosenfeld A, Tsotsos J K. Incremental learning through deep adaptation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 42(3): 651-663 [11] Hu W P, Qin Q, Wang M Y, Ma J W, Liu B. Continual learning by using information of each class holistically. Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), 2021, 35(9): 7797−7805 [12] Yang B Y, Lin M B, Zhang Y X, Liu B H, Liang X D, Ji R R, et al. Dynamic support network for few-shot class incremental learning. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(3): 2945−2951 [13] Shin H, Lee J K, Kim J, Kim J. Continual learning with deep generative replay. In: Proceedings of the 31st Conference on Neural Information Processing Systems (NeurIPS). Long Beach, USA: Curran Associates, Inc., 2017. 2990−2999 [14] Ven van de G M, Siegelmann H T, Tolias A S. Brain-inspired replay for continual learning with artificial neural networks. Nature Communications, 2020, 11(1): 1-14 doi: 10.1038/s41467-019-13993-7 [15] Belouadah E, Popescu A. IL2M: Class incremental learning with dual memory. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Seoul, South Korea: IEEE, 2019. 583−592 [16] Lopez-Paz D, Ranzato M. Gradient episodic memory for continual learning. In: Proceedings of the 31st Conference on Neural Information Processing Systems (NeurIPS). Long Beach, USA: Curran Associates, Inc., 2017. 6470−6479 [17] Chaudhry A, Marc'Aurelio R, Rohrbach M, Elhoseiny M. Efficient lifelong learning with A-GEM. In: Proceedings of the International Conference on Learning Representations (ICLR). New Orleans, USA: 2019. [18] Tang S X, Chen D P, Zhu J G, Yu S J, Ouyang W L. Layerwise optimization by gradient decomposition for continual learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, USA: IEEE, 2021. 9634−9643 [19] Zhang X Y, Zhao T F, Chen J S, Shen Y, Li X M. EPicker is an exemplar-based continual learning approach for knowledge accumulation in cryoEM particle picking. Nature Communications, 2022, 13(1): 1-10. doi: 10.1038/s41467-021-27699-2 [20] Schwarz J, Czarnecki W, Luketina J, Grabska-Barwinska A, Teh Y W, Pascanu R, et al. Progress & compress: A scalable framework for continual learning. In: Proceedings of the International Conference on Machine Learning (ICML). Stockholm, Sweden: JMLR, 2018. 4528−4537 [21] Zhang J T, Zhang J, Ghosh S, Li D W, Tasci S, Heck L, et al. Class-incremental learning via deep model consolidation. In: Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV). Snowmass, USA: IEEE, 2020. 1131−1140 [22] Liu X B, Wang W Q. GopGAN: Gradients orthogonal projection generative adversarial network with continual learning. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(1): 215−227 [23] Kirkpatrick J, Pascanu R, Rabinowitz N, Veness J, Desjardins G, Rusu A A, et al. Overcoming catastrophic forgetting in neural network. Proceedings of the National Academy of Sciences (PNAS), 2017, 114(13): 3521-3526 doi: 10.1073/pnas.1611835114 [24] Zenke F, Poole B, Ganguli S. Continual learning through synaptic intelligence. In: Proceedings of the International Conference on Machine Learning (ICML). Sydney, Australia: JMLR, 2017. 3987−3995 [25] Zeng G X, Chen Y, Cui B, Yu S. Continual learning of context-dependent processing in neural networks. Nature Machine Intelligence, 2019, 1(8): 364-372 doi: 10.1038/s42256-019-0080-x [26] Gao J Q, Li J Q, Shan H M, Qu Y Y, Wang J Z, Zhang J P. Forget less, count better: A domain-incremental self-distillation learning benchmark for lifelong crowd counting. arXiv preprint arXiv: 2205.03307, 2022. [27] 蒙西, 乔俊飞, 韩红桂. 基于类脑模块化神经网络的污水处理过程关键出水参数软测量. 自动化学报, 2019, 45(5): 906-919 doi: 10.16383/j.aas.2018.c170497Meng X, Qiao J F, Han H G. Soft measurement of key effluent parameters in wastewater treatment process using brain-like modular neural networks. Acta Automatica Sinica, 2019, 45(5): 906-919 doi: 10.16383/j.aas.2018.c170497 [28] Nadji-Tehrani M, Eslami A. A brain-inspired framework for evolutionary artificial general intelligence. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(12): 5257-5271 doi: 10.1109/TNNLS.2020.2965567 [29] Hu B, Guan Z H, Chen G R, Chen C L P. Neuroscience and network dynamics toward brain-inspired intelligence. IEEE Transactions on Cybernetics, 2022, 52(10): 10214−10227 [30] LeCun Y, Bottou L, Bengio Y, Haffner P. Gradient-based learning applied to document recognition. Proceedings of the IEEE, 1998, 86(11): 2278-2324 doi: 10.1109/5.726791 [31] Pao Y H, Takefji Y. Functional-link net computing: Theory, system architecture, and functionalities. Computer, 1992, 25(5): 76-79 doi: 10.1109/2.144401 [32] Schmidt W F, Kraaijveld M A, Duin R P W. Feedforward neural networks with random weights. In: Proceedings of the 11th IAPR International Conference on Pattern Recognition. IEEE Computer Society, 1992. 1−4 [33] Igelnik B, Pao Y H. Stochastic choice of basis functions in adaptive function approximation and the functional-link net. IEEE Transactions on Neural Networks, 1995, 6(6): 1320-1329 doi: 10.1109/72.471375 [34] Cao W P, Wang X Z, Ming Z, Gao J Z. A review on neural networks with random weights. Neurocomputing, 2011, 275: 278-287 [35] Zhang L, Suganthan P N. Visual tracking with convolutional random vector functional link network. IEEE Transactions on Cybernetics, 2016, 47(10): 3243-3253 [36] Dai W, Li D P, Zhou P, Chai T Y. Stochastic configuration networks with block increments for data modeling in process industries. Information Sciences, 2019, 484: 367-386 doi: 10.1016/j.ins.2019.01.062 [37] 邹伟东, 夏元清. 基于压缩因子的宽度学习系统的虚拟机性能预测. 自动化学报, 2022, 48(3): 724-734 doi: 10.16383/j.aas.c190307Zou W D, Xia Y Q. Virtual machine performance prediction using broad learning system based on compression factor. Acta Automatica Sinica, 2022, 48(3): 724-734 doi: 10.16383/j.aas.c190307 [38] Huang G B, Zhu QY, Siew C K. Extreme learning machine: theory and applications. Neurocomputing, 2006, 70(1-3): 489-501 doi: 10.1016/j.neucom.2005.12.126 [39] Wang D H, Li M. Stochastic configuration networks: Fundamentals and algorithms. IEEE Transactions on Cybernetics, 2017, 47(10): 3466-3479 doi: 10.1109/TCYB.2017.2734043 [40] Chen C L P, Liu Z L. Broad learning system: An effective and efficient incremental learning system without the need for deep architecture. IEEE Transactions on Neural Networks and Learning Systems, 2017, 29(1): 10-24 [41] 代伟, 李德鹏, 杨春雨, 马小平. 一种随机配置网络的模型与数据混合并行学习方法. 自动化学报, 2021, 47(10): 2427-2437 doi: 10.16383/j.aas.c190411Dai W, Li D P, Yang C Y, Ma X P. A model and data hybrid parallel learning method for stochastic configuration networks. Acta Automatica Sinica, 2021, 47(10): 2427-2437 doi: 10.16383/j.aas.c190411 [42] Gong X R, Zhang T, Chen C L P, Liu Z L. Research review for broad learning system: Algorithms, theory, and applications. IEEE Transactions on Cybernetics, 2022, 52(9): 8922−8950 [43] Abraham W C, Bear M F. Metaplasticity: the plasticity of synaptic plasticity. Trends in Neurosciences, 1996, 19(4): 126-130 doi: 10.1016/S0166-2236(96)80018-X [44] 王韶莉, 陆巍. 再可塑性在学习记忆中作用的研究进展. 生理学报, 2016, 68(4): 475-482 doi: 10.13294/j.aps.2016.0032Wang S L, Lu W. Progress on metaplasticity and its role in learning and memory. Acta Physiologica Sinica, 2016, 68(4): 475-482 doi: 10.13294/j.aps.2016.0032 [45] Jedlicka P, Tomko M, Robins A, Abraham W C. Contributions by metaplasticity to solving the catastrophic forgetting problem. Trends in Neurosciences, 2022, 45(9): 656-666 doi: 10.1016/j.tins.2022.06.002 [46] Sussmann H J. Uniqueness of the weights for minimal feedforward nets with a given input-output map. Neural Networks, 1992, 5(4): 589-593 doi: 10.1016/S0893-6080(05)80037-1 [47] Lancaster P, Tismenetsky M. The Theory of Matrices: With Applications. Elsevier, 1985. [48] Kay S M. Fundamentals of statistical signal processing: Estimation theory. Traces and Emergence of Nonlinear Programming. Prentice-Hall, Inc, 1993. [49] Kuhn H W, Tucker A W. Nonlinear programming. Traces and Emergence of Nonlinear Programming. Springer, 2014. [50] Pan P, Swaroop S, Immer A, Eschenhagen R, Turner R, Khan M, et al. Continual deep learning by functional regularisation of memorable past. In: Proceedings of the 34th Conference on Neural Information Processing Systems (NeurIPS). Vancouver, Canada: 2020. 4453−4464 [51] Verma V K, Liang K J, Mehta N, Rai P, Carin L. Efficient feature transformations for discriminative and generative continual learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, USA: IEEE, 2021. 13865−13875 期刊类型引用(1)
1. 崔鹏浩,李成,蒋忠中. 考虑零件库存的两机器装配线性能评估与库存控制. 计算机集成制造系统. 2024(01): 289-299 .  百度学术
百度学术其他类型引用(4)
-

 下载:
下载:

计量
- 文章访问数: 1953
- HTML全文浏览量: 531
- PDF下载量: 394
- 被引次数: 5
