

Optimal Scheduling for Regional Integrated Energy System Operation Based on the AMOWOA
-
摘要: 目前, 智能优化算法已广泛应用于工程优化中, 在当前多能耦合与互补的能源发展趋势下, 仅考虑系统经济指标的单目标优化模式已经不再适用于目前区域综合能源系统(Integrated energy system, IES)的运行优化调度, 需要研究一种多目标运行策略来解决区域综合能源系统的运行优化调度问题. 首先综合考虑经济与能源利用两个指标并结合商业住宅区域的特性, 以系统日运行收益和一次能源利用率为优化目标构建商业住宅区域综合能源系统多目标运行优化调度模型. 其次由于传统多目标智能优化算法缺乏一种最优解综合评价方法, 基于非支配排序以及拥挤度计算的多目标算法框架, 提出一种利用模糊一致矩阵选取全局最优解的多目标鲸鱼优化算法(A multi-objective whale optimization algorithm, AMOWOA), 并将提出算法对商住区域综合能源系统多目标运行优化调度模型进行求解. 最后以华东某商业住宅区域综合能源系统为例进行仿真, 验证了该方法的有效性和可行性.Abstract: Now intelligent optimization algorithms have been widely used in engineering optimization. Under the current energy development trend of multi-energy coupling and complementation, the single-objective optimization model that only considers system economic indicators is no longer applicable to the optimal scheduling for integrated energy system (IES) operation, it is necessary to study a multi-objective operation strategy to solve operation optimization and scheduling of regional integrated energy system problem. First, considering the two indicators of economy and energy utilization and combining the characteristics of commercial and residential areas, a multi-objective operation optimization and scheduling model of an integrated energy system for commercial and residential areas with system daily operating income and primary energy utilization as the optimization goals is constructed. Secondly, since the traditional multi-objective intelligent optimization algorithm lacks a comprehensive evaluation method of optimal solutions, based on the framework of multi-objective algorithm with non-dominated sorting and congestion calculation, a multi-objective whale optimization algorithm (AMOWOA) is proposed to select the optimal solution using fuzzy consistency matrix, and then the optimal solution will be evaluated by AMOWOA, and then the optimal solution will be selected by AMOWOA. AMOWOA is proposed to select the global optimal solution using a fuzzy consistency matrix, and the proposed algorithm is used to solve the multi-objective operation optimisation scheduling model of an integrated energysystem in a commercial and residential area. The proposed algorithm is used to solve the multi-objective operation optimisation model of commercial and residential energy system. Finally, a commercial and residential area integrated energy system in East China is used as an example to verify the effectiveness and feasibility of the proposed method.
-

图 1 商业住宅区域综合能源系统架构
Fig. 1 Integrated energy system architecture for commercial and residential area
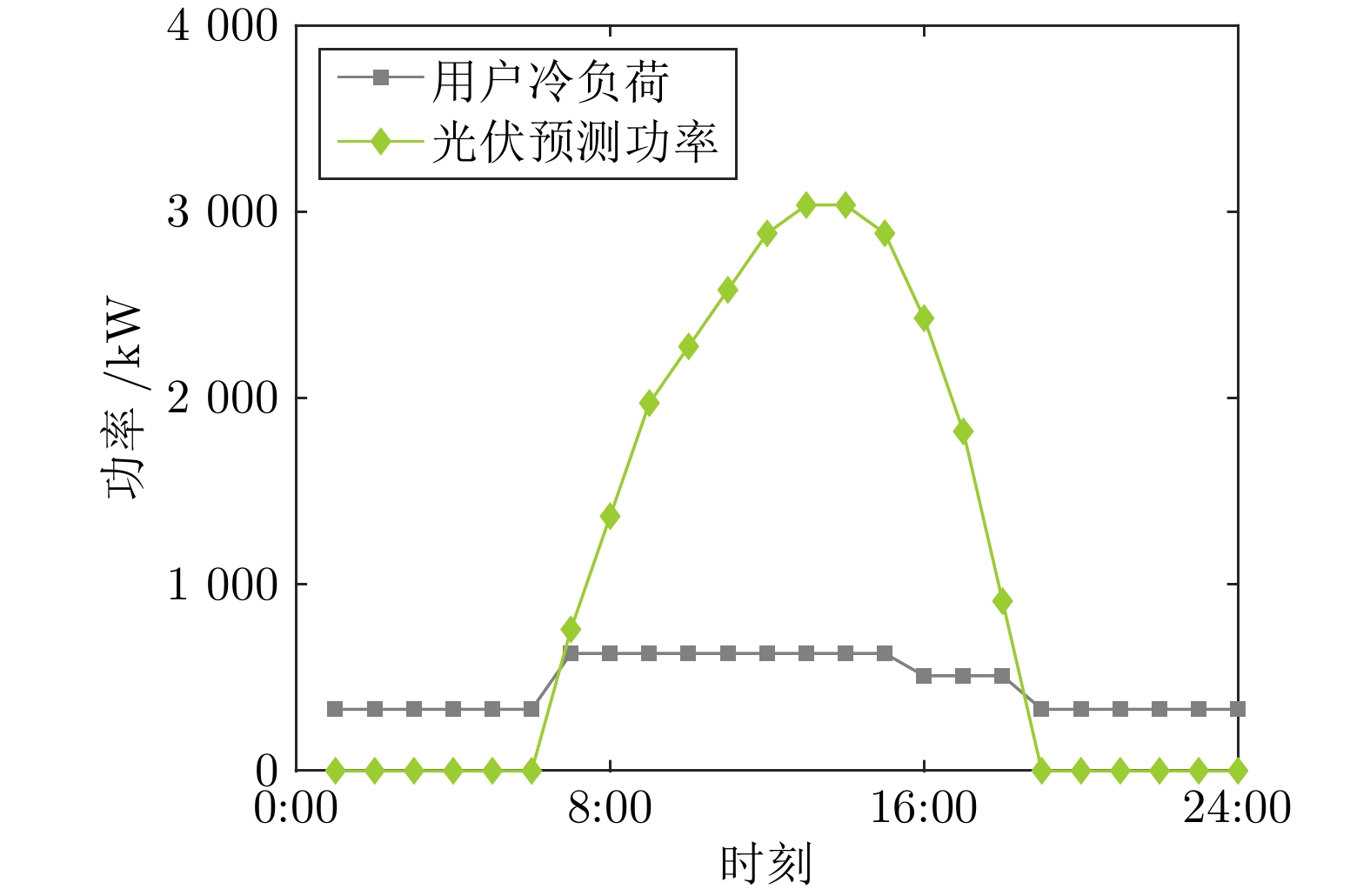
图 5 日均冷负荷与光伏预测功率曲线
Fig. 5 Average daily cooling load and photovoltaic predicted power curves
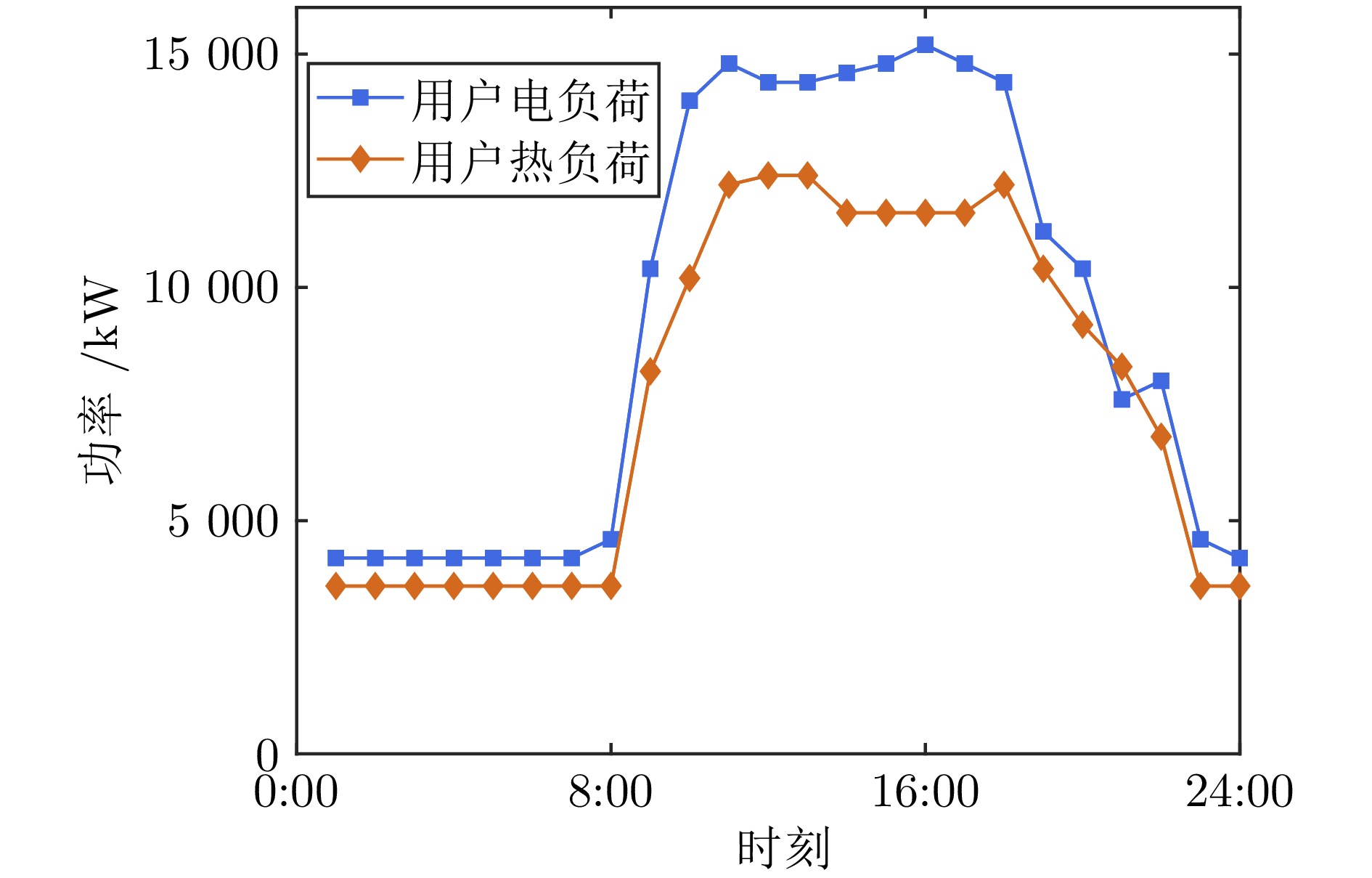
图 6 日均电负荷与日均热负荷曲线
Fig. 6 Daily average electric load and daily average heat load curve
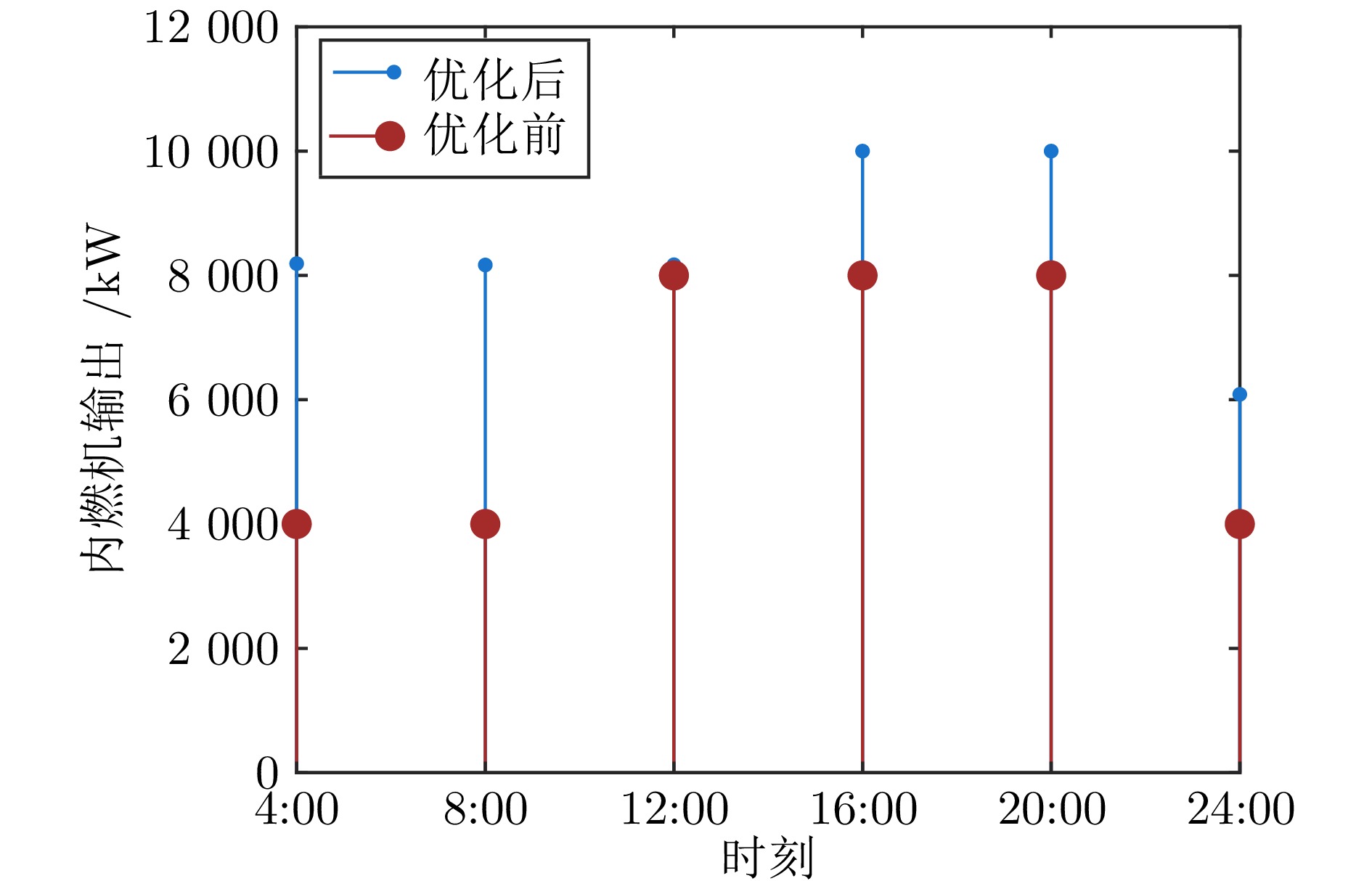
图 9 优化前后内燃机出力对比
Fig. 9 Comparison of internal combustion engines before and after optimize output
表 1 收敛度对比
Table 1 Convergence contrast
算法 指标 ZDT1 ZDT2 ZDT3 AMOWOA M 9.41${\times{10^{-4}}}$ 9.59${\times{10^{-4}}}$ 9.68${\times{10^{-4}}}$ V 2.26${\times{10^{-5}}}$ 3.41${\times{10^{-5}}}$ 2.16${\times{10^{-5}}}$ NSGA-II M 9.79${\times{10^{-4}}}$ 9.68${\times{10^{-4}}}$ 9.84${\times{10^{-4}}}$ V 4.88${\times{10^{-5}}}$ 5.84${\times{10^{-5}}}$ 3.63${\times{10^{-5}}}$ MOPSO M 9.46${\times{10^{-4}}}$ 1.42${\times{10^{-3}}}$ 9.73${\times{10^{-4}}}$ V 3.42${\times{10^{-5}}}$ 8.26${\times{10^{-5}}}$ 3.79${\times{10^{-5}}}$ PESA-II M 1.05${\times{10^{-3}}}$ 7.40${\times{10^{-4}}}$ 7.89${\times{10^{-3}}}$ V 0.00 0.00 1.10${\times{10^{-4}}}$ NSPSO M 6.42${\times{10^{-3}}}$ 9.51${\times{10^{-3}}}$ 4.91${\times{10^{-3}}}$ V 0.00 0.00 0.00  下载: 导出CSV
下载: 导出CSV
表 2 多样度对比
Table 2 Diversity contrast
算法 指标 ZDT1 ZDT2 ZDT3 AMOWOA M 0.65560 0.74680 0.79080 V 0.02109 0.03116 0.02679 NSGA-II M 0.74470 0.87290 0.78760 V 0.02901 0.05793 0.06771 MOPSO M 0.75250 0.93860 0.95170 V 0.03574 0.06475 0.01563 PESA-II M 0.84810 0.89290 1.22730 V 0.00287 0.05740 0.02930 NSPSO M 0.90700 0.92200 0.06210 V 0.00 1.20${\times{10^{-4}}}$ 6.90${\times{10^{-4}}}$
下载: 导出CSV
表 3 设备规格
Table 3 Specification of equipment
设备 配置容量 能效系数 (COP) 内燃机 10 000 kW — 光伏 7 100 kW — 电制冷机 2 000 kW 3.1 热泵 5 000 kW 4.4 (热)/5 (冷) 溴化锂余 8 000 kW 1.0 热机组 蓄电池 6 000 kWh 0.9 (充/放) 储热设备 5 000 kWh 0.9 (充/放) 储冷设备 2 000 kWh 0.9 (充/放)
下载: 导出CSV
表 4 模型参数
Table 4 Model parameter
参数 数值 内燃机电效率 41.33% 内燃机热效率 40.54% 内燃机燃料热耗率 7 962.726 kJ/kWh 电网输电效率 92% 发电厂发电效率 37%
下载: 导出CSV
表 5 初始运行条件
Table 5 Initial operating conditions
时段 内燃机出力 (kW) 1 (0:00−4:00) 4 000 2 (4:00−8:00) 4 000 3 (8:00−12:00) 8 000 4 (12:00−16:00) 8 000 5 (16:00−20:00) 8 000 6 (20:00−24:00) 4 000
下载: 导出CSV
A1 多目标优化标准测试函数表达式
A1 Multi-objective optimization standard test functions expression
测试函数 表达式 ZDT1 $\left\{\begin{aligned} &\min{f}_{1}\left({x}_{1}\right)={x}_{1}\\& \mathrm{min}{f}_{2}\left(x\right)=g\left(1-\sqrt{\frac{ {f}_{1} }{g}}\right)\\ &g\left(x\right)=1 +\frac{9\sum\limits _{i=2}^{m}{x}_{i} }{m-1}\end{aligned}\right.$ ZDT2 $\left\{\begin{aligned} &\min{f}_{1}\left({x}_{1}\right)={x}_{1}\\& \mathrm{min}{f}_{2}\left(x\right)=g\left(1-{\left(\frac{ {f}_{1} }{g}\right)}^{2}\right)\\& g\left(x\right)=1 +\frac{9\sum\limits _{i=2}^{m}{x}_{i} }{m-1}\end{aligned}\right.$ ZDT3 $\left\{\begin{aligned} &\min{f}_{1}\left({x}_{1}\right)={x}_{1}\\& \mathrm{min}{f}_{2}\left(x\right)=g\left(1-\sqrt{ \frac{ {f}_{1} }{g} }-\left(\frac{ {f}_{1} }{g}\right)\mathrm{sin}\left(10\pi {f}_{1}\right)\right)\\& g\left(x\right)=1 +\frac{9\sum\limits _{i=2}^{m}{x}_{i} }{m-1}\end{aligned}\right.$
下载: 导出CSV
-
[1] 王伟亮, 王丹, 贾宏杰, 陈沼宇, 郭炳庆, 周海明, 范孟华.能源互联网背景下的典型区域综合能源系统稳态分析研究综述[J]. 中国电机工程学报, 2016, 36(12):3292-3306Wang Wei-Liang, Wang Dan, Jia Hong-Jie, Chen Zhao-Yu, Guo Bing-Qing, Zhou Hai-Ming, Fan Meng-Hua.Review on steady state analysis of typical regional integrated energy system under the background of energy Internet[J]. Chinese Journal of Electrical Engineering, 2016, 36 (12): 3292-3306 [2] Kim I, James J A, Crittenden J. The case study of combined cooling heat and power and photovoltaic systems for building customers using HOMER software[J]. Electric Power Systems Research, 2017, 143:490-502 doi: 10.1016/j.jpgr.2016.10.061 [3] Gu W, Wang Z H, Wu Z, Luo Z, Tang Y Y, Wang J. An online optimal dispatch schedule for CCHP microgrids based on model predictive control[J]. IEEE Transactions on Smart Grid, 2017, 8 (5):2332-2342 [4] Zhang X, Shahidehpour M, Alabdulwahab A, Abusorrah A. Optimal expansion planning of energy hub with multiple energy infrastructures[J]. IEEE Transactions on Smart Grid, 2015, 6 (5):2302-2311 doi: 10.1109/TSG.2015.2390640 [5] 瞿凯平, 黄琳妮, 余涛, 张孝顺.碳交易机制下多区域综合能源系统的分散调度[J]. 中国电机工程学报, 2018, 38(03):697-707Qu Kai-Ping, Huang Lin-Ni, Yu Tao, Zhang Xiao-Shun. Decentralized scheduling of multi regional integrated energy system under carbon trading mechanism[J]. Chinese Journal of Electrical Engineering, 2018, 38 (03): 697-707 [6] 吴克河, 王继业, 李为, 朱亚运.面向能源互联网的新一代电力系统运行模式研究[J]. 中国电机工程学报, 2019, 39(04):966-979Wu Ke-He, Wang Ji-Ye, Li Wei, Zhu Ya-Yun. Research on operation mode of new generation power system for energy Internet[J]. Chinese Journal of Electrical Engineering, 2019, 39 (04): 966-979 [7] 别朝红, 林超凡, 李更丰, 邱爱慈.能源转型下弹性电力系统的发展与展望[J]. 中国电机工程学报, 2020, 40(09):2735-2745Bie Chao-Hong, Lin Chao-Fan, Li Geng-Feng, Qiu Ai-Ci. Development and prospect of flexible power system under energy transformation[J]. Chinese Journal of Electrical Engineering, 2020, 40 (09): 2735-2745 [8] Wang Y R, Zeng B, Guo J, Shi J Q, Zhang J H. Multi energy flow calculation method of electric heat gas integrated energy system[J]. Power Grid Technology, 2016, 40 (10): 2942-2951 [9] Hajabdollahi H, Ganjehkaviri A, Jaafar M N M. Assessment of new operational strategy in optimization of CCHP plant for different climates using evolutionary algorithms[J]. Applied Thermal Engineering, 2015, 75:468-480 doi: 10.1016/j.applthermaleng.2014.09.033 [10] 刘涤尘, 马恒瑞, 王波, 高文忠, 王骏, 闫秉科. 含冷热电联供及储能的区域综合能源系统运行优化. 电力系统自动化, 2018, 42(4): 113−120, 141Liu Di-Chen, Ma Heng-Rui, Wang Bo, Gao Wen-Zhong, Wang Jun, Yan Bing-Ke. Operation optimization of regional integrated energy system with combined cooling, heating and power supply and energy storage. Power System Automation, 2018, 42(4): 113−120, 141 [11] 施泉生, 丁建勇, 刘坤, 晏伟. 含电、气、热 3 种储能的微网综合能源系统经济优化运行. 电力自动化设备, 2019, 39(8): 269−276, 293Shi Quan-Sheng, Ding Jian-Yong, Liu Kun, Yan Wei. Economic optimization of microgrid integrated energy system with three kinds of energy storage including electricity, gas and heat. Power Automation Equipment, 2019, 39(8): 269−276, 293 [12] 顾洁, 白凯峰, 时亚军.基于多主体主从博弈优化交互机制的区域综合能源系统优化运行[J]. 电网技术, 2019, 43(09):3119-3134Gu Jie, Bai Kai-Feng, Shi Ya-Jun. Optimal operation of regional comprehensive energy system based on multi-agent master-slave game optimization interaction mechanism[J]. Power Grid Technology, 2019, 43 (09): 3119-3134 [13] 郑亚锋, 魏振华, 王春雨.计及储热装置的综合能源系统分层优化调度[J]. 中国电机工程学报, 2019, 39(S1):36-43 doi: 10.13334/J.0258-8013.PCSEE.190221Zheng Ya-Feng, Wei Zhen-Hua, Wang Chun-Yu. Hierarchical optimal scheduling of integrated energy system considering heat storage device[J]. Chinese Journal of Electrical Engineering, 2019, 39 (S1): 36-43 doi: 10.13334/J.0258-8013.PCSEE.190221 [14] 方彤, 蒋东方, 杨洋, 袁铁江.基于NSGA-II和熵权法的氢综合能源系统商业运营模式[J]. 中国电力, 2022, 55(01):110-118Fang Tong, Jiang Dong-Fang, Yang Yang, Yuan Tie-Jiang. Commercial operation mode of hydrogen integrated energy system based on NSGA-II and entropy weight method[J]. China Power, 2022, 55 (01): 110-118 [15] 齐世雄, 王秀丽, 邵成成, 王智冬, 朱承治.计及弹性恢复的区域综合能源系统多目标优化调度[J]. 中国电力, 2019, 52(06):19-26Qi Shi-Xiong, Wang Xiu-Li, Shao Cheng-Cheng, Wang Zhi-Dong, Zhu Cheng-Zhi.Multi objective optimal scheduling of regional integrated energy system considering elastic recovery[J]. China Power, 2019, 52 (06): 19-26 [16] 王磊, 姜涛, 宋丹, 崔杨, 胡扬宇, 柴旭峥, 唐耀华.基于灵活热电比的区域综合能源系统多目标优化调度[J]. 电力系统保护与控制, 2021, 49(08):151-159 doi: 10.19783/j.cnki.pspc.201561Wang Lei, Jiang Tao, Song Dan, Cui Yang, Hu Yang-Yu, Chai Xu-Zheng, Tang Yao-Hua. Multi objective optimal scheduling of regional integrated energy system based on flexible thermal power ratio[J]. Power System Protection and Control, 2021, 49 (08): 151-159 doi: 10.19783/j.cnki.pspc.201561 [17] 华煌圣, 刘育权, 熊文, 徐航, 施云辉, 董树锋.考虑综合能效水平的能源系统多目标优化运行[J]. 南方电网技术, 2018, 12(03):81-84 doi: 10.13648/j.cnki.issn1674-0629.2018.03.011Hua Huang-Sheng, Liu Yu-Quan, Xiong Wen, Xu Hang, Shi Yun-Hui, Dong Shu-Feng. Multi objective optimal operation of energy system considering comprehensive energy efficiency level[J]. China Southern Power Grid Technology, 2018, 12 (03): 81-84 doi: 10.13648/j.cnki.issn1674-0629.2018.03.011 [18] 程亮.基于鲁棒优化方法的区域综合能源系统运行优化调度策略[J]. 电力系统装备, 2021(18):2Cheng Liang.Operation optimization scheduling strategy of regional integrated energy system based on robust optimization method[J]. Power System Equipment, 2021 (18): 2 [19] 张涛, 郭玥彤, 李逸鸿, 余利, 章佳莹. 计及电气热综合需求响应的区域综合能源系统优化调度[J]. 电力系统保护与控制, 2021, 49(1):10 doi: 10.19783/j.cnki.pspc.200167Zhang Tao, Guo Yue-Tong, Li Yi-Hong, Yu Li, Zhang Jia-Ying. Optimal dispatching of regional integrated energy system considering comprehensive demand response of electrical and thermal[J]. Power System Protection and Control, 2021, 49 (1): 10 doi: 10.19783/j.cnki.pspc.200167 [20] 魏震波, 任小林, 黄宇涵. 考虑综合需求侧响应的区域综合能源系统多目标优化调度[J]. 电力建设, 2020, 41(7):8 doi: 10.12204/j.issn.1000-7229.2020.07.012Wei Zhen-Bo, Ren Xiao-Lin, Huang Yu-Han. Multi objective optimal scheduling of regional integrated energy system considering comprehensive demand side response[J]. Power Construction, 2020, 41 (7): 8 doi: 10.12204/j.issn.1000-7229.2020.07.012 [21] 耿琪, 胡炎, 何建宗, 周永言, 赵伟. 基于纳什谈判的区域综合能源系统运行优化[J]. 电力建设, 2020, 41(1):114-125Geng Qi, Hu Yan, He Jian-Zong, Zhou Yong-Yan, Zhao Wei.Operation optimization of regional integrated energy system based on nash negotiation[J]. Power Construction, 2020, 41 (1): 114-125 [22] 施云辉, 郭创新. 考虑运行风险的含储能综合能源系统优化调度[J]. 发电技术, 2020, 41(1):8 doi: 10.12096/j.2096-4528.pgt.19142Shi Yunhui, Guo Chuang-Xin. Optimal scheduling of integrated energy system with energy storage considering operation risk[J]. Power Generation Technology, 2020, 41 (1): 8 doi: 10.12096/j.2096-4528.pgt.19142 [23] 何畅, 程杉, 徐建宇, 等. 基于多时间尺度和多源储能的综合能源系统能量协调优化调度[J]. 电力系统及其自动化学报, 2020, 32(2):9 doi: 10.19635/j.cnki.csu-epsa.000363He Chang, Cheng Shan, Xu Jian-Yu, et al. Energy coordinated optimal scheduling of integrated energy system based on multi time scale and multi-source energy storage[J]. Journal of Power System and Automation, 2020, 32 (2): 9 doi: 10.19635/j.cnki.csu-epsa.000363 [24] 崔杨、闫石、仲悟之、王铮、张鹏、赵钰婷. 含电转气的区域综合能源系统热电优化调度[J]. 电网技术, 2020, 44(11):10 doi: 10.13335/j.1000-3673.pst.2019.2468Cui Yang, Yan Shi, Zhong Wu-Zhi, Wang Zheng, Zhang Peng, Zhao Yu-Ting. Thermoelectric optimal scheduling of regional integrated energy system with electricity to gas[J]. Power Grid Technology, 2020, 44 (11): 10 doi: 10.13335/j.1000-3673.pst.2019.2468 [25] 杨雍琦, 薛万磊, 张海静, 等. 计及需求响应的区域综合能源系统的优化调度方法[J]. 中国电力, 2021, 54(4):10Yang Yong-Qi, Xue Wan-Lei, Zhang Hai-Jing, et al.Optimal scheduling method of regional integrated energy system considering demand response[J]. China Power, 2021, 54 (4): 10 [26] 李玉帅, 李天义, 高炜, 高文忠. 基于异步动态事件触发通信策略的综合能源系统分布式协同优化运行方法. 自动化学报, 2020, 46(9): 1831-1843 doi: 10.16383/j.aas.c200172Li Yu-Shuai, Li Tian-Yi, Gao Wei, Gao Wen-Zhong. Distributed cooperative optimal operation method of integrated energy system based on asynchronous dynamic event triggered communication strategy. Journal of Automation, 2020, 46 (9): 1831 - 1843 doi: 10.16383/j.aas.c200172 [27] 耿志强, 毕帅, 王尊, 朱群雄, 韩永明. 基于改进NSGA-II算法的乙烯裂解炉操作优化[J]. 化工学报, 2020, 71(3):7Geng Zhi-Qiang, Bi Shuai, Wang Zun, Zhu Qun-Xiong, Han Yong-Ming. Operation optimization of ethylene cracking furnace based on improved NSGA - II algorithm[J]. Journal of Chemical Engineering, 2020, 71 (3): 7 [28] 曾鸣, 韩旭, 李源非, 刘金洁, 彭丽霖.基于Tent映射混沌优化NSGA-II算法的综合能源系统多目标协同优化运行[J]. 电力自动化设备, 2017, 37(06):220-228Zeng Ming, Han Xu, Li Yuan-Fei, Liu Jin-Jie, Peng Li-Lin. Multi objective cooperative optimization operation of integrated energy system based on tent map chaotic optimization NSGA - II algorithm[J]. Power Automation Equipment, 2017, 37 (06): 220-228 [29] 董帅, 王成福, 梁军, 董晓明, 梁正堂.等.计及电转气运行成本的综合能源系统多目标日前优化调度[J]. 电力系统自动化, 2018, 42(11):8-15 doi: 10.7500/AEPS20170721003Dong Shuai, Wang Cheng-Fu, Liang Jun, Dong Xiao-Ming, Liang Zheng-Tang.Multi objective day ahead optimal scheduling of integrated energy system considering the operation cost of electricity to gas[J]. Power System Automation, 2018, 42 (11): 8-15 doi: 10.7500/AEPS20170721003 [30] Mirjalili S, Lewis A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67 doi: 10.1016/j.advengsoft.2016.01.008 [31] Kaur G, Arora S. Chaotic whale optimization algorithm[J]. Journal of Computational Design and Engineering, 2018, 5:275–284 doi: 10.1016/j.jcde.2017.12.006 [32] 黄博南, 王勇, 李玉帅, 刘鑫蕊, 杨超. 基于分布式神经动态优化的综合能源系统多目标优化调度[J]. 自动化学报, 2020, 46: 1-19 doi: 10.16383/j.aas.c200168Huang Bo-Nan, Wang Yong, Li Yu-Shuai, Liu Xin-Rui, Yang Chao.Multi objective optimal scheduling of integrated energy system based on distributed neural dynamic optimization[J]. Journal of Automation, 2020, 46: 1–19 doi: 10.16383/j.aas.c200168 [33] 孙才志, 林学钰. 基于层次分析的模糊一致性判断矩阵及其应用[J]. 模糊系统与数学, 2002, 16(3): 59-63 doi: 10.3969/j.issn.1001-7402.2002.03.011Sun Cai-Zhi, Lin Xue-Yu.Fuzzy consistency judgment matrix based on analytic hierarchy process and its application[J]. Fuzzy Systems and Mathematics, 2002, 16 (3): 59-63 doi: 10.3969/j.issn.1001-7402.2002.03.011 [34] 陈民铀, 张聪誉, 罗辞勇. 自适应进化多目标粒子群优化算法[J]. 控制与决策, 2009, 24(12): 1851-1855 doi: 10.3321/j.issn:1001-0920.2009.12.018Chen Min, Zhang Cong-Yu, Luo Ci-Yong. Adaptive evolutionary multi-objective particle swarm optimization algorithm[J]. Control and Decision Making, 2009, 24 (12): 1851-1855 doi: 10.3321/j.issn:1001-0920.2009.12.018 [35] Deb K, Pratap A, Agarwal S, Meyarivan T. A fast and elitist multiobjective genetic algorithms: NSGA-II. IEEE Trans on Evolutionary Computation, 2002, 6(2):182-197 doi: 10.1109/4235.996017 [36] 熊珞琳, 毛帅, 唐漾, 孟科, 董朝阳, 钱锋. 基于强化学习的综合能源系统管理综述[J]. 自动化学报, 2021, 47(10): 2321-2340Xiong Luo-Lin, Mao Shuai, Tang Yang, Meng Ke, Dong Chao-Yang, Qian Feng. Summary of integrated energy system management based on reinforcement learning[J]. Journal of Automation, 2021, 47 (10): 2321 - 2340 [37] 顾伟, 陆帅, 王珺, 尹香, 张成龙, 王志贺. 多区域综合能源系统热网建模及系统运行优化[J]. 中国电机工程学报, 2017, 5:1305-1315Gu Wei, Lu Shuai, Wang Jun, Yin Xiang, Zhang Cheng-Long, Wang Zhi-He. Heating network modeling and system operation optimization of multi area integrated energy system[J]. Chinese Journal of Electrical Engineering, 2017, 5:1305-1315 [38] 白牧可, 王越, 唐巍, 吴聪, 张博. 基于区间线性规划的区域综合能源系统日前优化调度[J]. 电网技术, 2017, 12:240-247 doi: 10.13335/j.1000-3673.pst.2017.0390Bai Mu-Ke, Wang Yue, Tang Wei, Wu Cong, Zhang Bo. Day ahead optimal scheduling of regional integrated energy system based on interval linear programming[J]. Power Grid Technology, 2017, 12:240-247 doi: 10.13335/j.1000-3673.pst.2017.0390 [39] 吴聪, 唐巍, 白牧可, 张璐, 蔡永翔.基于能源路由器的用户侧能源互联网规划[J]. 电力系统自动化, 2017, 41(04):20-28Wu Cong, Tang Wei, Bai Mu-Ke, Zhang Lu, Cai Yong-Xiang.User side energy Internet planning based on energy router[J]. Power System Automation, 2017, 41 (04): 20-28 -

 下载:
下载:




计量
- 文章访问数: 808
- HTML全文浏览量: 613
- PDF下载量: 175
- 被引次数: 0
