

A Survey of Architecture and Key Technologies of Intelligent Connected Vehicle-road-cloud Cooperation System
-
摘要: 随着汽车产业电动化、智能化、网联化、共享化的发展驱动, 全球主要强国均将智能网联汽车列为国家战略发展方向. 蜂窝车联网、边缘计算网络和高精度定位系统的技术发展, 为车车、车路、车人和车云系统的全面融合提供了有效支撑. 车辆、道路、云平台与蜂窝车联网(Cellular vehicle-to-everything, C-V2X)网络的融合, 加速打通车内与车外、路面与路侧、云上与云间的信息互通, 为实现车路云一体化的融合感知、群体决策及协同控制提供了重要基础. 首先, 梳理了智能网联车路云协同系统架构与关键技术, 对该领域的演进特征、发展制约因素进行了总体概述; 其次, 阐述了新型车路云协同系统、智能网联C-V2X通信系统、云控系统和车路云协同测试系统的架构设计与工作原理; 然后, 从C-V2X组网、融合定位、测试评价角度, 介绍了车路云协同系统融合V2X网络、融合定位的技术演进与研究进展, 给出了智能网联场景的仿真平台、实车测试及评价指标; 最后, 对智能网联车路云协同系统的协同组网与控制、互操作、边缘智能服务和安全技术层面的发展趋势进行了展望.Abstract: With the development of electrification, intelligence, networking, and sharing in the automotive industry, all major countries have laid out the intelligent connected vehicle as a national strategy. The technological development of cellular vehicle-to-everything (C-V2X), edge computing networks, and high-precision positioning systems provide strong support for the comprehensive integration of the vehicle to vehicle, vehicle to the road, vehicle to pedestrian, and vehicle to cloud. Vehicles, roads, and cloud platforms are integrated with the C-V2X network, information exchange between the in-vehicle, road, and cloud with the out-vehicle, roadside, and different clouds will be accelerated, and the vehicle-road-cloud coordinated fusion perception, group decision, and collaborative control will also be established. Firstly, the architecture and key technologies of the intelligent connected vehicle-road-cloud cooperation system are combed, and its evolution characteristics and development constraints are summarized. Then, the architecture design and working principle of the new vehicle-road-cloud cooperation system, intelligent connected C-V2X communication system, the cloud control system, and vehicle-road-cloud cooperation test system are described. Besides, from the three aspects of C-V2X networking, fusion positioning, and test evaluation, the V2X network and fusion positioning-based technical evolution and research progress of vehicle-road-cloud cooperation system are introduced, and the simulation platform, real vehicle test, and evaluation index of intelligent networking scenario are also proposed. Finally, the development trends of the intelligent connected vehicle-road-cloud cooperation system in the aspects of collaborative networking and control, interoperability, edge intelligent service, and security technology are discussed.
-
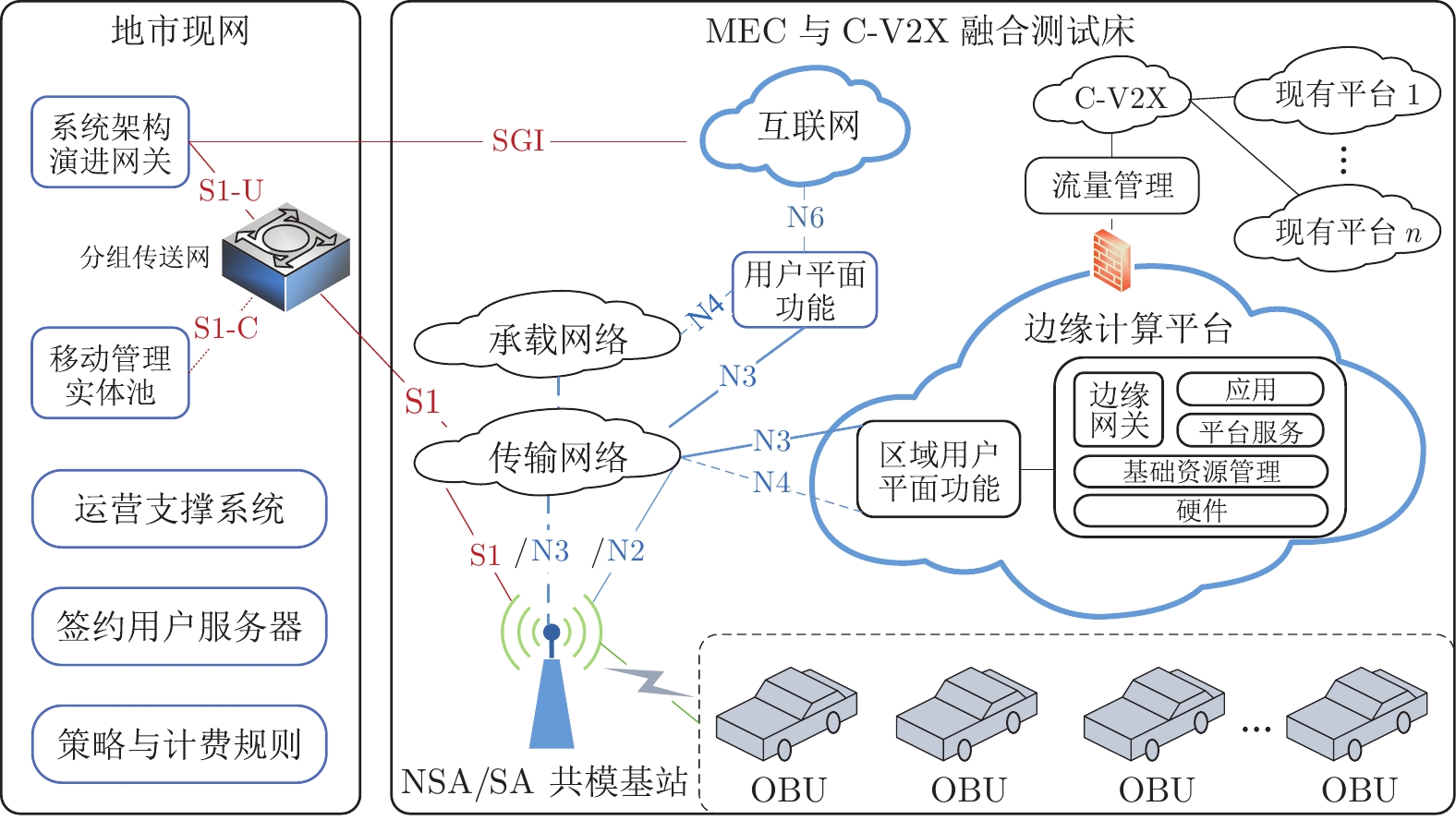
图 7 MEC 与 C-V2X 融合测试床组网架构图
Fig. 7 Networking architecture of MEC and C-V2X integration testbed
表 1 云控系统数据流向与数据类型示例
Table 1 Example of data flow direction and interactive data types of cloud control system
数据流向 数据交互对象 数据对象 上行 边缘云→区域云
区域云→中心云车路融合感知信息 动态交通事件信息 交通状态信息 动态交通管理信息 下行 区域云→边缘云
中心云→区域云交通状态信息 地图信息 动态交通管理信息 车辆运管信息  下载: 导出CSV
下载: 导出CSV
表 2 车联网技术与标准的对应关系
Table 2 The relationship between car networking technology and standards
标准 DSRC C-ITS C-V2X LTE-V2X NR-V2X 通信协议 IEEE 802.11p
IEEE 1609.2/3/4
SAE J2735
SAE J2945IEEE 802.11p
ETSI specifications
(ITS-G5/C-ITS protocol stack)3GPP R14,15
SAE J31613GPP R16
SAE J3161
下载: 导出CSV
表 3 MEC与C-V2X融合场景示例
Table 3 Example of MEC and C-V2X integration scenarios
交互场景 应用 交互场景 应用 单车与 MEC 交互 V2X 信息下发 多车与 MEC 协同交互 网联多车协同驾驶 动态高精度地图 车载信息增强 车路云协同感知 车辆在线诊断 单车与 MEC 及路侧智能设施交互 危险驾驶提醒 多车与 MEC 及路侧智能设施协同交互 匝道合流辅助 网联辅助驾驶 路口通行辅助 网联安全接管 路网协同调度
下载: 导出CSV
表 4 现有典型融合定位方案的技术对比
Table 4 Technical comparison of existing typical fusion positioning solutions
定位技术方案 传感器 精度 优势 缺点 GPS 与 IMU 融合定位[97] GPS & IMU 7.2 m (RMSE) 低成本 低精度、信号可用性差 带有道路标记检测与视觉融合的定位[98] GPS & IMU & 摄像头 经度: 1.43 m
纬度: 0.58 m低成本 易受光照和观察角度的影响 基于短距雷达的即时定位与地图构建[99] GPS & IMU & 雷达 经度: 0.38 m
纬度: 0.07 m低功耗、低成本、高精度 对动态环境的鲁棒性低 基于激光雷达的即时定位与地图构建[100] GPS & IMU & 激光雷达 经度: 0.017 m
纬度: 0.033 m高精度、对环境变化具有
鲁棒性高成本、高功耗和处理能力需求、对天气状况敏感 基于 5G 的定位[101] 5G 通信设备 水平方向: 0.3 m ~ 10 m
垂直方向: 2 m ~ 3 m高精度 需要依托 5G 基站 V2V 和板载传感器定位[102] GPS & V2V 通信 &
测距传感器0.6 m 不依赖于所有车辆能够通信 需要安装板载的测距传感器 基于车距和信噪比的
加权定位[103]GPS & V2V 通信 0.25 m ~ 0.85 m
(结合网络大小配置)提高鲁棒性和准确性 依赖车辆之间的通信链路 基于 RTK 测量与惯性
辅助的 GPS 定位[104]GPS & IMU & RTK 接收器 0.05 m ~ 0.08 m 提高定位的鲁棒性, 且可用于 GPS 无覆盖区域的定位性 需要部署 RTK 基站功能
下载: 导出CSV
表 5 不同 GNSS 模式下的定位精度
Table 5 Positioning accuracy in different GNSS modes
GNSS GPS + GLO + GAL + BDS GPS + GLO + GAL GPS + GAL GPS + GLO GPS + BDS GPS 水平位置精度 位置速度时间 1.5 m CEP 1.5 m CEP 1.5 m CEP 1.5 m CEP 1.5 m CEP 1.5 m CEP 星基增强系统 1.0 m CEP 1.0 m CEP 1.0 m CEP 1.0 m CEP 1.0 m CEP 1.0 m CEP RTK 0.01 m +
1 ppm CEP0.01m +
1ppm CEP0.01m +
1 ppm CEP0.01m +
1 ppm CEP0.01m +
1 ppm CEP0.01m +
1 ppm CEP高程位置精度 RTK 0.01 m +
1 ppm R500.01 m +
1 ppm R500.01 m +
1 ppm R500.01 m +
1 ppm R500.01 m +
1 ppm R500.01 m +
1 ppm R50
下载: 导出CSV
表 7 LTE-V2X典型场景通信性能要求[152]
Table 7 LTE-V2X communication performance requirements in typical scenarios[152]
典型场景 有效范围 (m) 绝对移动速度 (km/h) 终端相对速度 (km/h) 最大时延 (ms) 单次传输可靠性 (%) 累积传输可靠性 (%) 主干道 200 50 100 100 90 99 限速高速公路 320 160 280 100 80 96 不限速高速公路 320 280 280 100 80 96 非视距/城市 150 50 100 100 90 99 城市交叉路口 50 50 100 100 95 — 校园/商业区 50 30 30 100 90 99 碰撞前 20 80 160 20 95 —
下载: 导出CSV
-
[1] 李克强, 戴一凡, 李升波, 边明远. 智能网联汽车(ICV)技术的发展现状及趋势. 汽车安全与节能学报, 2017, 8(1): 1-14 doi: 10.3969/j.issn.1674-8484.2017.01.001Li Ke-Qiang, Dai Yi-Fan, Li Sheng-Bo, Bian Ming-Yuan. State-of-the-art and technical trends of intelligent and connected vehicles. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14 doi: 10.3969/j.issn.1674-8484.2017.01.001 [2] Yin Y F, Miller M A, Ceder A. Framework for deployment planning of bus rapid transit systems. Transportation Research Record, 2005, 1903(1): 11-19 doi: 10.1177/0361198105190300102 [3] Wright J L. Aashto's vehicle infrastructure integration activities(VII). In: Proceedings of the 12th World Congress on Intelligent Transport Systems. San Francisco, USA: IEEE, 2009. 299−305 [4] Mallejacq P, Boussuge J. The serti euroregional project: Achievements and perspective. In: Proceedings of the 2009 Intelligent Transportation Society of America-12th World Congress on Intelligent Transport Systems. San Francisco, USA: IEEE, 2009. 5851−5856 [5] Degrande T, Van den Eynde S, Vannieuwenborg F, Colle D, Verbrugge S. C-ITS road-side unit deployment on highways with ITS road-side systems: A techno-economic approach. IET Intelligent Transport Systems, 2021, 15(7): 863-874 doi: 10.1049/itr2.12065 [6] Fujimoto A, Kanoshima H, Sakai K, Ogawa M. Nationwide on: Road trials of smartway in Japan. In: Proceeding of the 16th ITS World Congress. Stockholm, Sweden, 2009. 1−3 [7] 李克强, 李家文, 常雪阳, 高博麟, 许庆, 李升波. 智能网联汽车云控系统原理及其典型应用. 汽车安全与节能学报, 2020, 11(3): 261-275 doi: 10.3969/j.issn.1674-8484.2020.03.001Li Ke-Qiang, Li Jia-Wen, Chang Xue-Yang, Gao Bo-Lin, Xu Qing, Li Sheng-Bo. Principles and typical applications of cloud control system for intelligent and connected vehicles. Journal of Automotive Safety and Energy, 2020, 11(3): 261-275 doi: 10.3969/j.issn.1674-8484.2020.03.001 [8] Cai K, Tian Y, Liu X, Fatikow S, Wang F, Cui L, et al. Modeling and controller design of a 6-DOF precision positioning system. Mechanical Systems and Signal Processing, 2018, 104: 536-555 doi: 10.1016/j.ymssp.2017.11.002 [9] Siegel J E, Erb D C, Sarma S E. A survey of the connected vehicle Landscape-architectures, enabling technologies, applications, and development areas. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(8): 2391-2406 [10] Kuutti S, Fallah S, Katsaros K, Dianati M, Mccullough F, Mouzakitis A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet of Things Journal, 2018, 5(2): 829-846 doi: 10.1109/JIOT.2018.2812300 [11] Avino G, Bande P, Frangoudis P A, Vitale C, Casetti C, Chiasserini C F. A MEC-based extended virtual sensing for automotive services. IEEE Transactions on Network and Service Management, 2019, 16(4): 1450-1463 doi: 10.1109/TNSM.2019.2931878 [12] Giannone F, Frangoudis P A, Ksentini A, Valcarenghi L. Orchestrating heterogeneous MEC-based applications for connected vehicles. Computer Networks, 2020, 180: 1-14 [13] 陈虹, 郭露露, 宫洵, 高炳钊, 张琳. 智能时代的汽车控制. 自动化学报, 2020, 46(7): 1313-1332 doi: 10.16383/j.aas.c190329Chen Hong, Guo Lu-Lu, Gong Xun, Gao Bing-Zhao, Zhang Lin. Automotive control in intelligent era. Acta Automatica Sinica, 2020, 46(7): 1313-1332 doi: 10.16383/j.aas.c190329 [14] 3GPP TS 23.287 V16.5.0: Architecture enhancements for 5G system (5GS) to support vehicle-to-everything (V2X) services (Release 16) [Online], available: https://portal.3gpp.org/ Chan-geRequests.aspx?q=1&specnumber=23.287, September 1, 2022 [15] Garcia M H C, Molina-Galan A, Boban M, Gozalvez J, Coll-Perales B, Sahin T, et al. A tutorial on 5G NR V2X communications. IEEE Communications Surveys & Tutorials, 2021, 23(3): 1972-2026 [16] Kato M, Fujii M. A study on time efficiency of CSMA/CA in inter-vehicle communication systems. In: Proceeding of the 2019 IEEE 8th Global Conference on Consumer Electronics. Osaka, Japan: 2019. 60−63 [17] ETSI TS 103 574 V1.1.1: Congestion control mechanisms for the C-V2X PC5 interface access layer part [Online], available: https://portal.etsi.org/webapp/workprogram/Report_WorkItem.asp?WKI_ID=53970, September 1, 2022 [18] Tsukada M, Oi T, Kitazawa M, Esaki H. Networked roadside perception units for autonomous driving. Sensors, 2020, 20(18): 5320 doi: 10.3390/s20185320 [19] Garlichs K, Gunther H J, Wolf L C. Generation rules for the collective perception service. In: Proceedings of the 2019 IEEE Vehicular Networking Conference. Los Angeles, USA: 2019. 1−8 [20] Thandavarayan G, Sepulcre M, Gozalvez J. Redundancy mitigation in cooperative perception for connected and automated vehicles. In: Proceedings of the 2020 IEEE 91st Vehicular Technology Conference. Antwerp, Belgium: 2020. 1−5 [21] Delooz Q, Festag A. Network load adaptation for collective perception in V2X communications. In: Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo. Graz, Austria: 2019. 1−6 [22] Allig C, Wanielik G. Dynamic dissemination method for collective perception. In: Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference. Auckland, New Zealand: 2019. 3756−3762 [23] 田彬, 赵祥模, 徐志刚, 王淼, 张宇琴. 车路协同条件下智能网联高速公路通行效率信息自适应分发协议: NRT-V2X. 中国公路学报, 2019, 32(06): 293-307Tian Bin, Zhao Xiang-Mo, Xu Zhi-Gang, Wang Miao, Zhang Yu-Qin. NRT-V2X: Adaptive data dissemination protocol for traffic efficient of connected and automated highways. China Journal of Highway and Transport, 2019, 32(06): 293-307 [24] Aoki S, Higuchi T, Altintas O. Cooperative perception with deep reinforcement learning for connected vehicles. In: Proceedings of the 2020 IEEE Intelligent Vehicles Symposium. Las Vegas, USA: 2020: 328−334 [25] Zheng J, Huang M. Traffic flow forecast through time series analysis based on deep learning. IEEE Access, 2020, 8: 82562-82570 doi: 10.1109/ACCESS.2020.2990738 [26] Wang P, Zhang J, Deng H, Zhang M. Real-time urban regional route planning model for connected vehicles based on V2X communication. Journal of Transport and Land Use, 2020, 13(1): 517-538 doi: 10.5198/jtlu.2020.1598 [27] Ozkan M F, Ma Y. A predictive control design with speed previewing information for vehicle fuel efficiency improvement. In: Proceedings of the 2020 American Control Conference. Denver, USA: IEEE, 2020. 2312−2317 [28] Yan L, Shen H. Top: Optimizing vehicle driving speed with vehicle trajectories for travel time minimization and road congestion avoidance. ACM Transactions on Cyber-Physical Systems, 2019, 4(2): 1-25 [29] Cao L, Wei S L, Misao A. Early warning method for traffic safety based on information entropy model of accident data. Advances in transportation studies, 2020, 71-82 [30] 中国智能网联汽车产业创新联盟. 智能网联汽车技术路线图2.0[Online], available: http://www.caicv.org.cn/, April 1, 2022 [31] 李升波, 关阳, 侯廉, 高洪波, 段京良, 梁爽, 等. 深度神经网络的关键技术及其在自动驾驶领域的应用. 汽车安全与节能学报, 2019, 10(2): 119-145 doi: 10.3969/j.issn.1674-8484.2019.02.001Li Sheng-Bo, Guan Yang, Hou Lian, Gao Hong-Bo, Duan Jing-Liang, Liang Shuang, et al. Key technique of deep neural network and its applications in autonomous driving. Journal of Automotive Safety and Energy, 2019, 10(2): 119-145 doi: 10.3969/j.issn.1674-8484.2019.02.001 [32] Zhong N, Zhang F, Zhang J, Peng L. Edge-enabled C-V2X infrastructure deployment for promoting advanced driving assistant systems in large-scale environment. SAE Technical Paper, 2020: 1-5 [33] Praise J J, Raj R J S, Benifa J V B. Development of reinforcement learning and pattern matching(RLPM) based firewall for secured cloud infrastructure. Wireless Personal Communications, 2020, 115(2): 993-1018 doi: 10.1007/s11277-020-07608-4 [34] Brahim M B, Menouar H. Optimizing V2X data collection and storage for a better cost and quality trade-off. In: Proceedings of the 6th IEEE International Conference on Advanced Logistics and Transport (ICALT). Bali, Indonesia: IEEE, 2017. 7−12 [35] Desai V, Dinesha H A. A hybrid approach to data pre-processing methods. In: Proceedings of the 2020 IEEE International Conference for Innovation in Technology. Bangluru, India: IEEE, 2020. 1−4 [36] Autonomous cars generate more than 300 tb of data per year [Online], available: https://www.tuxera.com/blog/autonomous-cars-300-tb-of-data-per-year, May 12, 2022 [37] 中国智能网联汽车产业创新联盟. 智能网联汽车产品测试评价白皮书[Online], available: http://www.caicv.org.cn, April 1, 2022 [38] Khan M I, Sesia S, Harri J. In vehicle resource orchestration for multi-V2X services. In: Proceedings of the 2019 IEEE 90th Vehicular Technology Conference. Honolulu, Hawaii, USA: 2019. 1−5 [39] Kühlmorgen S, Schmager P, Festag A, Fettweis G. Simulation-based evaluation of ETSI ITS-G5 and cellular-VCS in a real-world road traffic scenario. In: Proceedings of the 2018 IEEE 88th Vehicular Technology Conference. Chicago, Illinois, USA: 2018. 1−6 [40] Pandi S, Arranz R T, Nguyen G T, Fitzek F H. Massive video multi-casting in cellular networks using network coded cooperative communication. In: Proceedings of the 15th IEEE Annual Consumer Communications & Networking Conference. Vegas, Nevada, USA: IEEE, 2018. 1−2 [41] 邵雯娟, 沈庆国. 软件定义的D2D和V2X通信研究综述. 通信学报, 2019, 40(4): 179-194 doi: 10.11959/j.issn.1000-436x.2019075Shao Wen-Juan, Shen Qing-Guo. Survey of software defined D2D and V2X communication. Journal on Communications, 2019, 40(4): 179-194 doi: 10.11959/j.issn.1000-436x.2019075 [42] Jayakumar S. A review on resource allocation techniques in D2D communication for 5G and B5G technology. Peer-to-Peer Networking and Applications, 2021, 14(1): 243-269. doi: 10.1007/s12083-020-00962-x [43] Cheng X, Yang L, Shen X. D2D for intelligent transportation systems: A feasibility study. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 1784-1793 doi: 10.1109/TITS.2014.2377074 [44] Abd-Elrahman E, Said A M, Toukabri T, Afifi H, Marot M. Assisting V2V failure recovery using device-to-device communications. In: Proceedings of the Wireless Days. Rio de Janeiro, Brazil: IEEE, 2015. 1−3 [45] 甘秉鸿. 车联网C-V2X技术原理及测试解决方案. 信息通信技术与政策, 2019, (6): 84-89 doi: 10.3969/j.issn.1008-9217.2019.06.021Gan Bing-Hong. Internet of vehicles C-V2X technology principle and test solution. Information and Communications Technology and Policy, 2019, (6): 84-89 doi: 10.3969/j.issn.1008-9217.2019.06.021 [46] Bazzi A. Congestion control mechanisms in IEEE 802.11p and sidelink C-V2X. In: Proceedings of the 53rd Asilomar Conference on Signals, Systems, and Computers. Pacific Grove, California, USA: IEEE, 2019. 1125−1130 [47] SAE J2945/1: On-board system requirements for V2V safety communications [Online], available: https://www.sae.org/ standards/content/j2945/1_201603/, September 1, 2022 [48] ETSI TS 103 175: Cross layer DCC management entity for operation in the ITS G5A and ITS G5B medium [Online], available: https://portal.etsi.org/webapp/workprogram/Report_ WorkItem.asp?WKI_ID=39345, September 1, 2022 [49] On-board system requirements for LTE-V2X V2V Safety Communications [Online], available: https://www.sae.org/standard-s/content/j3161/1/, May 12, 2022 [50] ETSI TS 102 687 V1.2.1: Decentralized Congestion Control Mechanisms for Intelligent Transport Systems Operating in the 5 GHz Range Access Layer Part [Online], available: https:// portal.etsi.org/webapp/workprogram/Report_WorkItem.asp?WKI_ID=41973, September 1, 2022 [51] 3GPP TS 38.214 V16.6.0: Technical specification group radio access betwork, physical layer procedures for data (Release 16) [Online], available: https://portal.3gpp.org/ChangeReques-ts.aspx?q=1&specnumber=38.214, September 1, 2022 [52] Kloiber B, Harri J, Strang T. Dice the TX power-improving awareness quality in VANETs by random transmit power selection. In: Proceedings of the 2012 IEEE Vehicular Networking Conference. Seoul, South Korea: IEEE, 2012. 56−63 [53] Kang B, Jung S, Bahk S. Sensing-based power adaptation for cellular V2X mode 4. In: Proceedings of the 2018 IEEE International Symposium on Dynamic Spectrum Access Networks. Seoul, South Korea: IEEE, 2018. 1−4 [54] Mansouri A, Martinez V, Harri J. A first investigation of congestion control for LTE-V2X mode 4. In: Proceedings of the 15th Annual Conference on Wireless On-demand Network Systems and Services. Wengen, Switzerland: IEEE, 2019. 56−63 [55] Toghi B, Saifuddin M, Fallah Y P, Mughal M O. Analysis of distributed congestion control in cellular vehicle-to-everything networks. In: Proceedings of the 2019 IEEE 90th Vehicular Technology Conference. Honolulu, USA: IEEE, 2019. 1−7 [56] Yoon Y, Kim H. Balancing power and rate control for improved congestion control in cellular V2X communication environments. IEEE Access, 2020, 8: 105071-105081 doi: 10.1109/ACCESS.2020.2999925 [57] Shimizu T, Cheng B, Lu H, Kenney J. Comparative analysis of DSRC and LTE-V2X PC5 mode 4 with SAE congestion control. In: Proceedings of the 2020 IEEE Vehicular Networking Conference. New York, USA: 2020. 1−8 [58] Khan M I, Sepulcre M, Harri J. Cooperative wireless congestion control for multi-service V2X communication. In: Proceedings of the 2020 IEEE Intelligent Vehicles Symposium. Las Vegas, Nevada, USA: 2020. 1357−1363 [59] Vesco A, Scopigno R, Casetti C, Chiasserini C F. Investigating the effectiveness of decentralized congestion control in vehicular networks. In: Proceedings of the 2013 IEEE Globecom Workshops. Atlanta, Georgia, USA: 2013. 1314−1319 [60] Bansal G, Kenney J B, Rohrs C E. LIMERIC: A linear adaptive message rate algorithm for DSRC congestion control. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4182-4197 doi: 10.1109/TVT.2013.2275014 [61] Kühlmorgen S, Lu H, Festag A, Kenney J. Evaluation of congestion-enabled forwarding with mixed data traffic in vehicular communications. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(1): 233-247 [62] Choi J, Kim H. A QoS-aware congestion control scheme for C-V2X safety communications. In: Proceedings of the 2020 IEEE Vehicular Networking Conference. New York, USA: 2020. 1−4 [63] Naik G, Park J M J, Ashdown J. C$ \hat 2$ RC: Channel congestion-based re-transmission control for 3GPP-based V2X technologies. In: Proceedings of the 2020 IEEE Wireless Communications and Networking Conference. Seoul, South Korea: 2020. 1−6 [64] 3GPP TS 23.501 V16.4.0: System Architecture for the 5G System (5GS) Stage 2 (Release 16) [Online], available: https:// portal.3gpp.org/ChangeRequests.aspx?q=1&specnumber=23.501, September 1, 2022 [65] Qiu H, Qiu M, Lu R. Secure V2X communication network based on intelligent pki and edge computing. IEEE Network, 2019, 34(2): 172-178 [66] NOKIA. Car2MEC Project [Online], avaiable: https://www.nokia.com/about-us/news/releases/2019/03/21/continental-deutsche-telekom-fraunhofer-esk-mhp-and-nokia-successfully-conclude-tests-of-connected-driving-technology-on-the-a9-digital-test-track, May 12, 2022 [67] Kousaridas A, Schimpe A, Euler S, Vilajosana X, Fallgren M, Landi G, et al. 5G cross-border operation for connected and automated mobility: Challenges and solutions. Future Internet, 2019, 12(1): 5 doi: 10.3390/fi12010005 [68] Sedar R, Vazquez-Gallego F, Casellas R, Vilalta R, Munoz R, Silva R, et al. Standards-compliant multi-protocol on-board unit for the evaluation of connected and automated mobility services in multi-vendor environments. Sensors, 2021, 21(6): 2090 doi: 10.3390/s21062090 [69] 边缘计算产业联盟(ECC), 网络5.0产业和技术创新联盟 (N5A). 运营商边缘计算网络技术白皮书 [Online], available: http://www.ecconsortium.org/Lists/show/id/376.html, April 1, 2022 [70] Michler A, Schwarzbach P, Ubler H, Tauscher P, Michler O. A V2X based data dissemination scheme for 3D map aided GNSS positioning in urban environments. In: Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems. Rhodes, Greece: IEEE, 2020. 1−6 [71] 魏二虎, 刘学习, 王凌轩, 刘经南. BDS/GPS组合精密单点定位精度分析与评价. 武汉大学学报(信息科学版), 2018, 43(11): 1654-1660Wei Er-Hu, Liu Xue-Xi, Wang Ling-Xuan, Liu Jing-Nan. Analysis and evaluation of precision single point positioning accuracy of BDS/GPS combination. Geomatics and Information Science of Wuhan University, 2018, 43(11): 1654-1660 [72] 吴有龙, 杨忠, 陈维娜, 姚文进, 陈闯, 陈帅. 北斗单系统及多GNSS系统组合全球卫星可用性分析. 弹箭与制导学报, 2021, 41(1): 18-23 doi: 10.15892/j.cnki.djzdxb.2021.01.004Wu You-Long, Yang Zhong, Chen Wei-Na, Yao Wen-Jin, Chen Chuang, Chen Shuai. Satellite availability evaluation on a global scale for BDS stand-alone system and multi-GNSS system. Journal of Projectiles, Rockets, Missiles and Guidance, 2021, 41(1): 18-23 doi: 10.15892/j.cnki.djzdxb.2021.01.004 [73] 卢鋆, 宿晨庚, 胡敏, 唐祖平, 袁海波, 徐君毅, 等. 北斗三号系统互操作实现与性能分析. 中国科学: 物理学, 力学, 天文学, 2021, 51(1): 26-39Lu Yun, Su Chen-Geng, Hu Min, Tang Zu-Ping, Yuan Hai-Bo, Xu Jun-Yi, et al. Interoperability implementation and performance analysis of beidou-3 system. SCIENCE CHINA Physics, Mechanics & Astronomy, 2021, 51(1): 26-39 [74] 布金伟, 左小清, 金立新, 常军. BDS/QZSS及其组合系统在中国和日本及周边地区的定位性能评估. 武汉大学学报(信息科学版), 2020, 45(4): 574-585, 611Lu Jin-Wei, Zuo Xiao-Qing, Jin Li-Xin, Chang Jun. Localization performance evaluation of BDS/QZSS and its combined systems in China, Japan and surrounding areas. Geomatics and Information Science of Wuhan University, 2020, 45(4): 574-585, 611 [75] Forghani M, Karimipour F, Claramunt C. From cellular positioning data to trajectories: steps towards a more accurate mobility exploration. Transportation Research Part C: Emerging Technologies, 2020, 117: 102666 doi: 10.1016/j.trc.2020.102666 [76] Abdelbar M, Buehrer R M. Improving cellular positioning indoors through trajectory matching. In: Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium. Savannah, Georgia, USA: 2016. 219−224 [77] Campos R S. Evolution of positioning techniques in cellular networks, from 2G to 4G. Wireless Communications and Mobile Computing, 2017, 2017: 1-17 [78] Reyna-Orta A, Andrade A G. Dimensionality reduction to solve resource allocation problem in 5G UDN using genetic algorithm. Soft Computing, 2021, 25(6): 4629-4642 doi: 10.1007/s00500-020-05473-8 [79] Lin Z, Lv T, Zhang J A, Liu R P. Tensor-based high-accuracy position estimation for 5G mmwave massive MIMO systems. In: Proceedings of the ICC IEEE International Conference on Communications. Dublin, Ireland: IEEE, 2020. 1−6 [80] 段续庭, 田大新, 王云鹏. 基于V2X通信网络的车辆协同定位增强方法. 汽车工程, 2018, 40(8): 947-951, 959 doi: 10.19562/j.chinasae.qcgc.2018.08.012Duan Xu-Ting, Tian Da-Xin, Wang Yun-Peng. Vehicle cooperative positioning enhancement method based on V2X communication networks. Automotive Engineering, 2018, 40(8): 947-951, 959 doi: 10.19562/j.chinasae.qcgc.2018.08.012 [81] Li K, Li W. Uniform nonlinear error model based on gibbs parameter for the INS. IEEE Sensors Journal, 2021, 21(6): 7725-7735 doi: 10.1109/JSEN.2020.3048484 [82] 上官伟, 谢朝曦, 姜维. 基于IMU标定补偿的列车组合定位优化方法. 铁道学报, 2020, 42(2): 57-64Shang Guan-Wei, Xie Chao-Xi, Jiang Wei. Optimization method for integrated train positioning accuracy based on IMU calibration compensation. Journal of the China Railway Society, 2020, 42(2): 57-64. [83] Nezhadshahbodaghi M, Mosavi M R, Hajialinajar M T. Fusing denoised stereo visual odometry, INS and GPS measurements for autonomous navigation in a tightly coupled approach. GPS Solutions, 2021, 25(2): 1-18 [84] Min H, Wu X, Cheng C, Zhao X M. Kinematic and dynamic vehicle model-assisted global positioning method for autonomous vehicles with low-cost GPS/camera/in-vehicle sensors. Sensors, 2019, 19(24): 5430 doi: 10.3390/s19245430 [85] Chang L, Niu X J, Liu T Y, Tang J, Qian C. GNSS/INS/LiDAR-SLAM integrated navigation system based on graph optimization. Remote Sensing, 2019, 11(9): 1009 doi: 10.3390/rs11091009 [86] Hu L, Li Z, Yang X, Wei C. WLAN indoor positioning method based on gradient boosting and particle filtering. International Journal of Simulation and Process Modelling, 2019, 14(6): 535-545 doi: 10.1504/IJSPM.2019.106170 [87] Li Z, You K, Song S. Cooperative source seeking via networked multi-vehicle systems. Automatica, 2020, 115: 108853 doi: 10.1016/j.automatica.2020.108853 [88] 孙宁, 闫梦如, 倪捷, 葛如海, 秦洪懋, 唐翊铭, 等. 基于GRI的多车协同定位研究. 汽车工程, 2018, 40(4): 488-493, 499 doi: 10.19562/j.chinasae.qcgc.2018.04.017Sun Ning, Yan Meng-Ru, Ni Jie, Ge Ru-Hai, Qin Hong-Mao, Tang Yi-Ming, et al. A study on multi-vehicle cooperative positioning based on GRI. Automotive Engineering, 2018, 40(4): 488-493, 499 doi: 10.19562/j.chinasae.qcgc.2018.04.017 [89] 谯小康, 屈小媚. 基于车辆与车辆的车联网分布式协同感知定位. 控制理论与应用, 2021, 38(7): 988-996 doi: 10.7641/CTA.2021.00693Qiao Xiao-Kang, Qu Xiao-Mei. Vehicle to vehicle-based distributed cooperative sensing positioning for internet of vehicles. Control Theory & Applications, 2021, 38(7): 988-996 doi: 10.7641/CTA.2021.00693 [90] Chu X H, Lu Z M, Gesbert D, Wang L H, Wen X M. Vehicle localization via cooperative channel mapping. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5719-5733 doi: 10.1109/TVT.2021.3073682 [91] Song Y X, Yu R, Fu Y C, Zhou L, Boukerche A. Multi-vehicle cooperative positioning correction framework based on vehicular blockchain. In: Proceedings of the 9th ACM Symposium on Design and Analysis of Intelligent Vehicular Networks and Applications. Miami Beach, USA: 2019. 23−29 [92] Xiao Z, Yang D, Wen F, Jiang K. A unified multiple-target positioning framework for intelligent connected vehicles. Sensors. 2019, 19(9): 1967 doi: 10.3390/s19091967 [93] Liu Q, Liu R, Wang Z, Han L, Thompson J S. A V2X integrated positioning methodology in ultra-dense networks. IEEE Internet of Things Journal, 2021, 8(23): 17014-17028 doi: 10.1109/JIOT.2021.3075532 [94] Wang K, Yu X, Xiong Q Y, Zhu Q W, Lu W, Huang Y, et al. Learning to improve WLAN indoor positioning accuracy based on DBSCAN-KRF algorithm from RSS fingerprint data. IEEE Access, 2019, 7: 72308-72315 doi: 10.1109/ACCESS.2019.2919329 [95] Schwarzbach P, Michler A, Tauscher P, Michler O. An empirical study on V2X enhanced low-cost GNSS cooperative positioning in urban environments. Sensors. 2019, 19(23): 5201 doi: 10.3390/s19235201 [96] Du L, Chen W, Pei Z, Ji J, Tong B, Zheng H. Design of data acquisition system with high precision for lane-change behavior detection applied in intelligent and connected vehicles. In: Proceedings of the 11th International Conference on Information Science and Technology. Chengdu, China: 2021. 697−701 [97] Zhang F, Stahle H, Chen G, Simon C C C, Buckl C, Knoll A. A sensor fusion approach for localization with cumulative error elimination. In: Proceedings of the 2012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems. Hamburg, Germany: 2012. 1−6 [98] Suhr J K, Jang J, Min D, Jun H G. Sensor fusion-based low-cost vehicle localization system for complex urban environments. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(5): 1078-1086 [99] Ward E, Folkesson J. Vehicle localization with low cost radar sensors. In: Proceedings of the 2016 IEEE Intelligent Vehicles Symposium. Gothenburg, Sweden: 2016. 864−870 [100] Castorena J, Agarwal S. Ground-edge-based LIDAR localization without a reflectivity calibration for autonomous driving. IEEE Robotics and Automation Letters, 2017, 3(1): 344-351 [101] 洪学敏, 许雪婷, 彭敖, 孙甜, 汤贵敏, 杨琦, 等. 基于5G移动通信系统融合定位的关键技术与系统架构演进. 厦门大学学报(自然科学版), 2021, 60(3): 571-585Hong Xue-Min, Xu Xue-Ting, Peng Ao, Sun Tian, Tang Gui-Min, Yang Qi, et al. Key technologies and system architecture evolution of fusion position based on 5G mobile communication systems. Journal of Xiamen University (Natural Science), 2021, 60(3): 571-585 [102] Fujii S, Fujita A, Umedu T, Kaneda S, Yamaguchi H, Higashino T, et al. Cooperative vehicle positioning via V2V communications and onboard sensors. In: Proceedings of the 2011 IEEE Vehicular Technology Conference. San Francisco, USA: 2011. 1−5 [103] Altoaimy L, Mahgoub I. Fuzzy logic based localization for vehicular ad hoc networks. In: Proceedings of the 2014 IEEE Symposium on Computational Intelligence in Vehicles and Transportation Systems. Orlando, Florida, USA: 2014. 121−128 [104] Lai C, Guo R. Extend the RTK survey to GNSS-Denied areas using a low-cost inertial-aided positioning pole. In: Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation. St. Louis, Missouri: 2021. 3212−3226 [105] Wang D, Lv H, An X, Wu J. A High-accuracy constrained SINS/CNS tight integrated navigation for high-orbit automated transfer vehicles. Acta Astronautica, 2018, 151: 614-625. doi: 10.1016/j.actaastro.2018.07.015 [106] 黄令勇, 刘宇玺, 辛国栋, 朱雷鸣, 李五, 张欢. 不同系统组合的精密单点定位性能分析. 国防科技大学学报, 2017, 39(3): 30-35, 51 doi: 10.11887/j.cn.201703005Huang Ling-Yong, Liu Yu-Xi, Xin Guo-Dong, Zhu Lei-Ming, Li Wu, Zhang Huang. Performance analysis of different system precise point positioning. Journal of National University of Defense Technology, 2017, 39(3): 30-35, 51 doi: 10.11887/j.cn.201703005 [107] 张小红, 马福建. 低轨导航增强GNSS发展综述. 测绘学报, 2019, 48(9): 1073-1087 doi: 10.11947/j.AGCS.2019.20190176Zhang Xiao-Hong, Ma Fu-Jian. Review of the development of LEO navigation-augmented GNSS. Acta Geodaetica et Cartographica Sinica, 2019, 48(9): 1073-1087 doi: 10.11947/j.AGCS.2019.20190176 [108] Li Q Q, Chen L, Li M, Shaw S L, Nuchter A. A sensor-fusion drivable-region and lane-detection system for autonomous vehicle navigation in challenging road scenarios. IEEE Transactions on Vehicular Technology, 2013, 63(2): 540-555 [109] Wang B, Sun D, Zu H, Wu C, Zhang D S, Chen X H. Fusion positioning system based on IMU and roadside LiDAR in tunnel for C-V2X use. In: Proceedings of the 2020 SAE 3rd International Forum on Connected Automated Vehicle Highway System through the China Highway and Transportation Society. Jinan, China: 2020. 1−6 [110] 初星河, 路兆铭, 王鲁晗, 武穆清, 温向明. 多径信号辅助的网联车辆无线协作定位. 北京邮电大学学报, 2021, 44(2): 116-123 doi: 10.13190/j.jbupt.2020-191Chu Xing-He, Lu Zhao-Ming, Wang Lu-Han, Wu Mu-Qing, Wen Xiang-Ming. Multi-path assisted cooperative radio-based localization for connected vehicles. Journal of Beijing University of Posts and Telecommunications, 2021, 44(2): 116-123 doi: 10.13190/j.jbupt.2020-191 [111] 张家波, 李哲, 王超凡. 面向车联网的LTE网络性能测试与分析. 计算机工程, 2018, 44(7): 303-307, 315 doi: 10.19678/j.issn.1000-3428.0047257Zhang Jia-Bo, Li Zhe, Wang Chao-Fan. Performance test and tnalysis of LTE network for car network. Computer Engineering, 2018, 44(7): 303-307, 315 doi: 10.19678/j.issn.1000-3428.0047257 [112] Kutila M, Kauvo K, Aalto P, Martinez V G, Niemi M, Zheng Y. 5G Network performance experiments for automated car functions. In: Proceedings of the 2020 IEEE 3rd 5G World Forum. Bangalore, India: 2020. 366−371 [113] Azlan N N N, Rohani M M. Overview of application of traffic simulation model. In: Proceedings of the 2018 MATEC Web of Conferences. Penang, Malaysia: 2018. 1−6 [114] 马建, 孙守增, 芮海田, 马勇, 王磊, 刘辉, 等. 中国交通工程学术研究综述. 中国公路学报, 2016, 6: 1-161 doi: 10.3969/j.issn.1001-7372.2016.01.001Ma Jian, Sun Shou-Zeng, Rui Hai-Tian, Ma Yong, Wang Lei, Liu Hui, et al. A summary of academic research on China's traffic engineering. China Journal of Highway and Transport, 2016, 6: 1-161 doi: 10.3969/j.issn.1001-7372.2016.01.001 [115] 王润民, 邓晓峰, 徐志刚, 赵祥模. 车联网仿真测试评价技术研究综述. 计算机应用研究, 2019, 36(7): 1921-1926, 1939 doi: 10.19734/j.issn.1001-3695.2018.05.0260Wang Run-Min, Deng Xiao-Feng, Xu Zhi-Gang, Zhao Xiang-Mo. Survey on simulation testing and evaluation of Internet of vehicles. Application Research of Computers, 2019, 36(7): 1921-1926, 1939 doi: 10.19734/j.issn.1001-3695.2018.05.0260 [116] Nardini G, Sabella D, Stea G, Thakkar P, Virdis A. Simu5G-an OMNeT++ library for end-to-end performance evaluation of 5G networks. IEEE Access, 2020, 8: 181176-181191 doi: 10.1109/ACCESS.2020.3028550 [117] Li T. Research on TCP/IP congestion control based on NS-2 network congestion control based on NS-2 network simulation platform. Telecommunications and Radio Engineering, 2019, 78(19): 1737-1745 doi: 10.1615/TelecomRadEng.v78.i19.60 [118] Rudenkova M. A methodology of modeling the IEEE 802.11 wireless LAN using NS-3. In: Proceedings of the 2020 International Conference on Information Technologies in Engineering Education. Moscow, Russia: 2020. 1−4 [119] Ghimire A, Badi A. Underwater acoustic channel propagation module for simulation of large-scale sub-aquatic internet of things (IoT) networks in jist/swans. In: Proceedings of the 2018 SoutheastCon. St. Petersburg, Florida, USA: 2018: 1−4 [120] Yun W, Wei L H, Hui H Z. Study of VANET in intelligent transportation system based on OPNET. International Journal of Control and Automation, 2016, 9(5): 199-206 doi: 10.14257/ijca.2016.9.5.19 [121] Meyer H, Odyurt U, Polstra S, Paradas E, Alonso I G, Pimentel A D. On the effectiveness of communication-centric modelling of complex embedded systems. In: Proceedings of the 2018 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Ubiquitous Computing & Communications, Big Data & Cloud Computing, Social Computing & Networking, Sustainable Computing & Communications. Melbourne, Australia: 2018. 979−986 [122] Aireen G, Mohan C E, Pooja C H, Pooja F T, Raghuram K M. Wireless network simulation and analysis using qualnet. In: Proceedings of the 2nd International Conference on Communication and Electronics Systems. Coimbatore, India: 2017. 251−255 [123] Leite B, Azevedo P, Leixo R, Rossetti R J F. Simulating a three-lane roundabout using SUMO. In: Proceedings of the 2019 International Conference on Intelligent Transport Systems. Ch-am, Switzerland: 2019. 18−31 [124] Maduranga K L D, Yasamali R G N, Sathyaprasad I M S, Weerakoon H U. Selection of optimum junction operation strategy for gatambe intersection using VISSIM simulation. In: Proceedings of the 2018 International Conference on Sustainable Built Environment. Singapore, Singapore: 2018. 22−35 [125] Reza I, Ratrout N T, Rahman S M. Calibration protocol for paramics microscopic traffic simulation model: Application of neuro-fuzzy approach. Canadian Journal of Civil Engineering, 2016, 43(4): 361-368 doi: 10.1139/cjce-2015-0435 [126] Song Z, Wang H, Sun J, Tian Y. Experimental findings with VISSIM and TransModeler for evaluating environmental and safety impacts using micro-simulations. Transportation research record, 2020, 2674(8): 566-580 doi: 10.1177/0361198120925077 [127] Kim T, Hobeika A G, Jung H. Evaluation of the performance of vehicle-to-vehicle applications in an urban network. Journal of Intelligent Transportation Systems, 2018, 22(3): 218-228 doi: 10.1080/15472450.2017.1413368 [128] Cobos C, Erazo C, Luna J, Mendoza M, Gaviria C, Arteaga C, et al. Multi-objective memetic algorithm based on NSGA-II and simulated annealing for calibrating CORSIM micro-simulation models of vehicular traffic flow. In: Proceedings of the 2016 Conference of the Spanish Association for Artificial Intelligence. Cham, Switzerland: 2016. 468−476 [129] Lu Z, Du Z, Zhu X. Research on automatic generation method of scenario based on panosim. In: Proceedings of the 4th International Conference on Compute and Data Analysis, ACM International Conference Proceeding Series. Silicon Valley, San Jose, USA: 2020. 159−163 [130] Sommer C, German R, Dressler F. Bidirectionally coupled network and road traffic simulation for improved IVC analysis. IEEE Transactions on mobile computing, 2010, 10(1): 3-15 [131] 合作式智能运输系统车用通信系统应用层及数据交互标准 (第二阶段), T/CSAE 157-2020, 2020Application Layer and Data Interaction Standard of Vehicle Communication System for Cooperative Intelligent Transportation System (The second stage), T/CSAE 157-2020, 2020 [132] Fayazi S A, Vahidi A, Luckow A. A Vehicle-in-the-loop (VIL) verification of an all-autonomous intersection control scheme. Transportation Research Part C: Emerging Technologies, 2019, 107: 193-210 doi: 10.1016/j.trc.2019.07.027 [133] Zhang Y, Lu S, Yang Y, Guo Q. Internet-distributed vehicle-in-the-loop simulation for HEVs. IEEE transactions on Vehicular Technology, 2018, 67(5): 3729-3739 doi: 10.1109/TVT.2018.2803088 [134] 李骁驰, 赵祥模, 徐志刚, 王润民, 王文威. 面向智能网联交通系统的模块化柔性试验场. 中国公路学报, 2019, 32(6): 137-146 doi: 10.19721/j.cnki.1001-7372.2019.06.014Li Xiao-Chi, Zhao Xiang-Mo, Xu Zhi-Gang, Wang Run-Min, Wang Wen-Wei. Modular flexible test bed for intelligent and connected transportation system. China Journal of Highway and Transport, 2019, 32(6): 137-146 doi: 10.19721/j.cnki.1001-7372.2019.06.014 [135] Zhang X, Wang R, Zhao X, Xu Z, Zeng F. Experimental study on performance of V2X communication applied in typical traffic systems in a closed test scenario. In: Proceedings of the 20th COTA International Conference of Transportation Professionals. Xi'an, China: 2020. 812−824 [136] Klapez M, Grazia C A, Casoni M. Application-level performance of IEEE 802.11 p in safety-related V2X field trials. IEEE Internet of Things Journal, 2020, 7(5): 3850-3860 doi: 10.1109/JIOT.2020.2967649 [137] Zhang Y, Kang T P, Flannagan M, Bao S, Pradhan A, Sullivan J. Hazard cuing systems for teen drivers: A test-track evaluation on mcity. In: Proceedings of the 2019 SAE World Congress Experience. Detroit, USA: 2019. 1−7 [138] 郑玲钰, 赵益, 王忠宇, 吴兵. 基于用户感知的城市道路交通服务水平评价方法. 同济大学学报(自然科学版), 2016, 44(5): 753-757 doi: 10.11908/j.issn.0253-374x.2016.05.015Zhao Ling-Yu, Zhao Yi, Wang Zhong-Yu. Wu Bing. Level of service evaluation of urban streets based on user perception.Journal of Natural Science, Tongji University, 2016, 44(5): 0753-0757 doi: 10.11908/j.issn.0253-374x.2016.05.015 [139] Fan Y, Liu L, Dong S, et al. Network performance test and analysis of LTE-V2X in industrial park scenario[J]. Wireless Communications and Mobile Computing, 2020, 2020 [140] Kong H, Chen W, Fu S, Zheng H, Du L, Mao Y. OBU design and test analysis with centimeter-level positioning for LTE-V2X. In: Proceedings of the 5th International Conference on Transportation Information and Safety. Liverpool, UK: 2019. 383−387 [141] Avcil M N, Soyturk M. Performance evaluation of V2X communications and services in cellular network with a realistic simulation environment. In: Proceedings of the 1st International Informatics and Software Engineering Conference. Ankara, Turkey: 2019. 1−6 [142] Hofer M, Bernado L, Rainer B, Xu Z N, Temme G, Khan S, et al. Evaluation of vehicle-in-the-loop tests for wireless V2X communication. In: Proceedings of the 2019 IEEE 90th Vehicular Technology Conference. Honolulu, USA: 2019. 1−5 [143] Ahmad S, Musleh S, Nordin R. The gap between expectation & reality: Long term evolution & third generation (3G) network performance in campus with test mobile system. In: Proceedings of the 9th Asia Modelling Symposium. Kuala Lumpur, Malaysia: 2015. 164−168 [144] Wang Y, Liu X, Peng X, Du H. Research on LTE-V2X outfield expressway performance testing method in the 5.9 GHz band. In: Proceedings of the IEEE 3rd International Conference on Computer and Communication Engineering Technology. Beijing, China: 2020. 284−288 [145] 刘丁贝, 张心睿, 王润民, 李骁驰, 徐志刚. 封闭测试场条件下基于DSRC的车联网通信性能测试. 汽车工程学报, 2020, 10(3): 180-187 doi: 10.3969/j.issn.2095-1469.2020.03.04Liu Ding-Bei, Zhang Xin-Rui, Wang Run-Min, Li Xiao-Chi, Xu Zhi-Gang. DSRC-based vehicle network communication performance in closed field test. Chinese Journal of Automotive Engineering, 2020, 10(3): 180-187 doi: 10.3969/j.issn.2095-1469.2020.03.04 [146] 段宗涛, 郑西彬, 李莹, 康军, 王超. 车联网环境下的WiFi网络实验床. 微电子学与计算机, 2015, 32(7): 90-94 doi: 10.19304/j.cnki.issn1000-7180.2015.07.021Duan Zong-Tao, Zheng Xi-Bin, Li Ying, Kang Jun, Wang Chao. WIFI network testbed orientied Internet of vehicles. Microelectronics & Computer, 2015, 32(7): 90-94 doi: 10.19304/j.cnki.issn1000-7180.2015.07.021 [147] Mir Z H, Filali F. Simulation and performance evaluation of vehicle-to-vehicle (V2V) propagation model in urban environment. In: Proceedings of the 7th International Conference on Intelligent Systems, Modelling and Simulation. Bangkok, Thailand: 2016. 394−399 [148] Shi M, Lu C, Zhang Y, Yao D Y. DSRC and LTE-V communication performance evaluation and improvement based on typical V2X application at intersection. In: Proceedings of the 2017 Chinese Automation Congress. Jinan, China: 2017. 556− 561 [149] Lv Y, Wang Y, Liu X, Xu R, Fang J, Peng X. Research on performance testing for urban scenario based on terminal equipment of LTE-V2X vehicle network. In: Proceedings of the 14th IEEE International Conference on Signal Processing. Beijing, China: 2018. 993−996 [150] Miao L, Virtusio J J, Hua K L. PC5-based Cellular-V2X Evolution and Deployment. Sensors, 2021, 21(3): 843 doi: 10.3390/s21030843 [151] 刘宗巍, 宋昊坤, 郝瀚, 赵福全. 基于4S融合的新一代智能汽车创新发展战略研究. 中国工程科学, 2021, 23(3): 153-162Liu Zong-Wei, Song Hao-Kun, Hao Han, Zhao Fu-Quan. Innovation and development strategies of China’s New-generation smart vehicles based on 4S integratio. Strategic Study of CAE, 2021, 23(3): 153-162 [152] 3GPP TR 22.885 V14.0.0: Study on LTE support for vehicle to everything (V2X) services (Release 14) [Online], available: https://portal.3gpp.org/ChangeRequests.aspx?q=1&specnumber=22.885, September 1, 2022 [153] Study on Enhancement of 3GPP Support for 5G V2X Services (Release 16), 3rd Generation Partnership Project TR 22.886 V16.2.0, 2018 [154] Li S E, Zheng Y, Li K, Wang J. An overview of vehicular platoon control under the four-component framework. In: Proceedings of the 2015 IEEE Intelligent Vehicles Symposium. Seoul, South Korea: 2015. 286−4291 [155] Willemsen D, Schmeitz A, Fusco M, Ark E J, Kempen E, Soderman M, et al. Requirements review from EU projects D2.1 of H2020 project ENSEMBLE [Online], available: http://www. platooningensemble.eu, April 1, 2022 [156] 杨振凯, 华一新, 訾璐, 张政, 王继伟. 浅析高精度地图发展现状及关键技术. 测绘通报, 2021, 6: 54-60 doi: 10.13474/j.cnki.11-2246.2021.0176Yang Zhen-Hua, Hua Yi-Xin, Zi Lu, Zhang Zheng, Wang Ji-Wei. Analysis of the development status and key technologies of high-precision map. Bulletin of Surveying and Mapping, 2021, 6: 54-60 doi: 10.13474/j.cnki.11-2246.2021.0176 [157] Zhang R, Lu R, Cheng X, Wang N, Yang L. A UAV-enabled data dissemination protocol with proactive caching and Ffile sharing in V2X networks. IEEE Transactions on Communications, 2021, 69(6): 3930-3942 doi: 10.1109/TCOMM.2021.3064569 [158] Lu R, Zhang R, Cheng X, Yang L. UAV-assisted data dissemination with proactive caching and file sharing in V2X networks. In: Proceedings of the 2019 IEEE Global Communications Conference. Waikoloa, USA: 2019. 1−6 [159] Wang B, Zhang R, Chen C, Cheng X, Jin Y. Density-aware deployment with multi-layer UAV-V2X communication networks. IET Communications, 2020, 14(16): 2709-2715 doi: 10.1049/iet-com.2020.0364 [160] Abbasi O, Yanikomeroglu H, Ebrahimi A, Mokari N, Alzenad M. Dynamic NOMA/OMA for V2X networks with UAV relaying. In: Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference. Victoria, British Columbia, Canada: 2020. 1−7 [161] Demir U, Toker C, Ekici O. Energy-efficient deployment of UAV in V2X network considering latency and backhaul issues. In: Proceedings of the 2020 IEEE International Black Sea Conference on Communications and Networking. Odessa, Ukraine: 2020. 1−6 [162] Ding F, Song A, Zhang D, Tong E, Pan Z, You X. Interference-aware wireless networks for home monitoring and performance evaluation. IEEE Transactions on Automation Science and Engineering, 2018, 15(3): 1286-1297 doi: 10.1109/TASE.2017.2778303 [163] Li S E, Gao F, Li K, Wang L Y, You K, Cao D. Robust longitudinal control of multi-vehicle systems-A distributed H-Infinity Method. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2779-2788 doi: 10.1109/TITS.2017.2760910 [164] Yang Z, Huang J, Yang D, Zhong Z. Collision-free ecological cooperative robust control for uncertain vehicular platoons with communication delay. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2153-2166 doi: 10.1109/TVT.2021.3060808 [165] Ding F, Wen T, Ren S, Bao J. Performance analysis of a clustering model for QoS-aware service recommendation. Electronics, 2020, 9(5): 1-18 [166] Li K, Bian Y, Li S E, Xu B, Wang J. Distributed model predictive control of multi-vehicle systems with switching communication topologies. Transportation Research Part C: Emerging Technologies, 2020, 118: 102717 doi: 10.1016/j.trc.2020.102717 [167] Shao Y, Sun Z. Eco-approach with traffic prediction and experimental validation for connected and autonomous vehicles. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1562-1572 doi: 10.1109/TITS.2020.2972198 [168] Yang Z, Feng Y, Liu H X. A cooperative driving framework for urban arterials in mixed traffic conditions. Transportation research part C: emerging technologies, 2021, 124: 102918 doi: 10.1016/j.trc.2020.102918 [169] Li S E, Qin X, Li K, Wang J, Xie B. Robustness analysis and controller synthesis of homogeneous vehicular platoons with bounded parameter uncertainty. IEEE-ASME Transactions on Mechatronics, 2017, 22 (2): 1014-1025 doi: 10.1109/TMECH.2017.2647987 [170] Xu B, Li S E, Bian Y, Li S, Ban X J, Wang J, et al. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections. Transportation Research Part C Emerging Technologies, 2018, 93: 322-334 doi: 10.1016/j.trc.2018.06.004 [171] Ma F, Yang Y, Wang J, Li X, Wu G, Zhao Y, et al. Eco-driving-based cooperative adaptive cruise control of connected vehicles platoon at signalized intersections. Transportation Research Part D: Transport and Environment, 2021, 92: 102746 doi: 10.1016/j.trd.2021.102746 [172] Lin Q, Li S E, Du X, Zhang X, Peng H, Luo Y, et al. Minimize the fuel consumption of connected vehicles between two red-signalized intersections in urban traffic. IEEE Transactions on Vehicular Technology, 2018, 67 (10): 9060-9072 doi: 10.1109/TVT.2018.2864616 [173] Arthurs P, Gillam L, Krause P, Wang N, Halder K, Mouzakitis A. A taxonomy and survey of edge cloud computing for intelligent transportation systems and connected vehicles. IEEE Transactions on Intelligent Transportation Systems, 2021 [174] Kirubasri G, Sankar S, Pandey D, Pandey B K, Singh H, Anand R. A recent survey on 6G vehicular technology, applications and challenges. In: Proceedings of the 9th International Conference on Reliability, Infocom Technologies and Optimization. Noida, India: IEEE, 2021. 1−5 [175] 陈山枝, 葛雨明, 时岩. 蜂窝车联网(C-V2X)技术发展、应用及展望. 电信科学, 2022, 38(01): 1-12Chen Shan-Zhi, Ge Yu-Ming, Shi Yan. Technology development, application and prospect of cellular vehicle-to-everything(C-V2X). Telecommunications Science, 2022, 38(01): 1-12 [176] Ding F, Ma Z, Li Z, Su R, Zhang D, Zhu H. A terminal-oriented distributed traffic flow splitting strategy for multi-service of V2X networks. Electronics, 2019, 8(6): 1-16 [177] Khan H, Luoto P, Samarakoon S, Bennis M, Latva-Aho, M. Network slicing for vehicular communication. Transactions on Emerging Telecommunications Technologies, 2021, 32(1): 1-14 [178] Huang M, Yi Y, Zhang G. Service caching and task offloading for mobile edge computing-enabled intelligent connected vehicles. Journal of Shanghai Jiaotong University (Science), 2021, 26(5): 670-679 doi: 10.1007/s12204-021-2356-7 [179] 丁飞, 沙宇晨, 洪莹, 蒯晓, 张登银. 智能网联汽车计算卸载与边缘缓存联合优化策略. 系统仿真学报, DOI: 10.16182/j.issn 1004731x.joss.22-0147Ding Fei, Sha Yu-Chen, Hong Ying, Kuai Xiao, Zhang Deng-Yin. Joint Optimization Strategy of computing offloading and edge caching for intelligent connected vehicles. Journal of System Simulation, DOI: 10.16182/j.issn1004731x.joss.22-0147 [180] Feng L, Li W, Lin Y, Zhu L, Guo S, Zhen Z. Joint computation offloading and URLLC resource allocation for collaborative MEC assisted cellular-V2X networks. IEEE Access, 2020, 8: 24914-24926 doi: 10.1109/ACCESS.2020.2970750 [181] Li S, Hu X, Du Y. Deep reinforcement learning for computation offloading and resource allocation in unmanned-aerial-vehicle assisted edge computing. Sensors, 2021, 21(19): 6499 doi: 10.3390/s21196499 [182] Saraiva T, Campos C, Fontes R, Rothenberg C, Sorour S. Valaee S. An application-driven framework for intelligent transportation systems using 5G network slicing. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(8): 5247-5260 doi: 10.1109/TITS.2021.3086064 [183] 丁飞, 米冠宇, 童恩, 张楠, 暴建民, 张登银. 多通路高分辨率网络与注意力机制融合的车辆检测模型. 汽车安全与节能学报, 2022, 13(01): 122-130 doi: 10.3969/j.issn.1674-8484.2022.01.012Ding Fei, Mi Guan-Yu, Tong En, Zhang Nan, Bao Jian-Min, Zhang Deng-Yin. Multi-channel high-resolution network and attentionmechanism fusion for vehicle detection model. Journal of Automotive Safety and Energy, 2022, 13(01): 122-130 doi: 10.3969/j.issn.1674-8484.2022.01.012 [184] Alnasser A, Sun H, Jiang J. Cyber security challenges and solutions for V2X communications: A survey. Computer Networks, 2019, 151: 52-67 doi: 10.1016/j.comnet.2018.12.018 [185] 吴武飞, 李仁发, 曾刚, 谢勇, 谢国琪. 智能网联车网络安全研究综述. 通信学报, 2020, 41(6): 161-174 doi: 10.11959/j.issn.1000-436x.2020130Wu Wu-Fei, Li Ren-Fa, Zeng Gang, Xie Yong, Xie Guo-Qi. Survey of the intelligent and connected vehicle cybersecurity. Journal on Communications, 2020, 41(06): 161-174 doi: 10.11959/j.issn.1000-436x.2020130 [186] Liu Xue-Jiao, Yin Yi-Dan, Chen Wei, Xia Ying-Jie, Xu Jia-Li, Han Li-Dong. Secure data sharing scheme in Internet of Vehicles based on blockchain. Journal of Zhejiang University (Engineering Science), 2021, 55(5): 957-965 [187] Jabbar R, Kharbeche M, Al-Khalifa K, Krichen M, Barkaoui K. Blockchain for the internet of vehicles: a decentralized IoT solution for vehicles communication using Ethereum. Sensors, 2020, 20(14): 3928 doi: 10.3390/s20143928 [188] Khan M A, Ghosh S, Busari S A, Huq K M S, Dagiuklas T, Mumtaz S, et al. Robust, resilient and reliable architecture for V2X communications. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(7): 4414-4430 doi: 10.1109/TITS.2021.3084519 -

 下载:
下载:



计量
- 文章访问数: 5421
- HTML全文浏览量: 4581
- PDF下载量: 1611
- 被引次数: 0
