

Adaptive Antiswing Control for Underactuated Dual Overhead Crane System Using Neural Network
-
摘要: 由于工业实践对运输能力提出了更高的要求, 双吊车的应用日益广泛. 然而其动力学模型非线性很强, 因此控制器结构十分复杂. 另一方面, 大型货物的摆动很难抑制, 这给双吊车的自动化带来了巨大的挑战. 为了处理以上问题, 首先, 采用神经网络准确地估计了系统的模型, 在此基础上提出了一种自适应防摆控制方法, 很好地实现了双吊车系统的防摆控制; 然后, 采用李雅普诺夫方法, 严格地证明了系统在平衡点的渐近稳定性; 最后, 通过大量的实验结果, 验证了该方法具有良好的性能.Abstract: There is a mounting application of dual overhead crane systems because of the higher requirements for transportation capacity in industrial practice. However, due to the strong nonlinearity of system dynamics, the designed controller is quite sophisticated. On the other hand, the swing of large cargos is more difficult to suppress, making the automation of dual overhead crane systems a huge challenge. To solve the above problems, an adaptive antiswing control method is proposed by utilizing a neural network to estimate the model of dual overhead crane systems, which achieves superior antiswing performance for dual overhead crane systems. Then, the asymptotic stability of the system at the equilibrium point is proved by the Lyapunov techniques. Finally, the control performance is validated by experimental results.
-
Key words:
- Antiswing control /
- dual crane /
- adaptive control /
- neural network /
- underactuated system
-
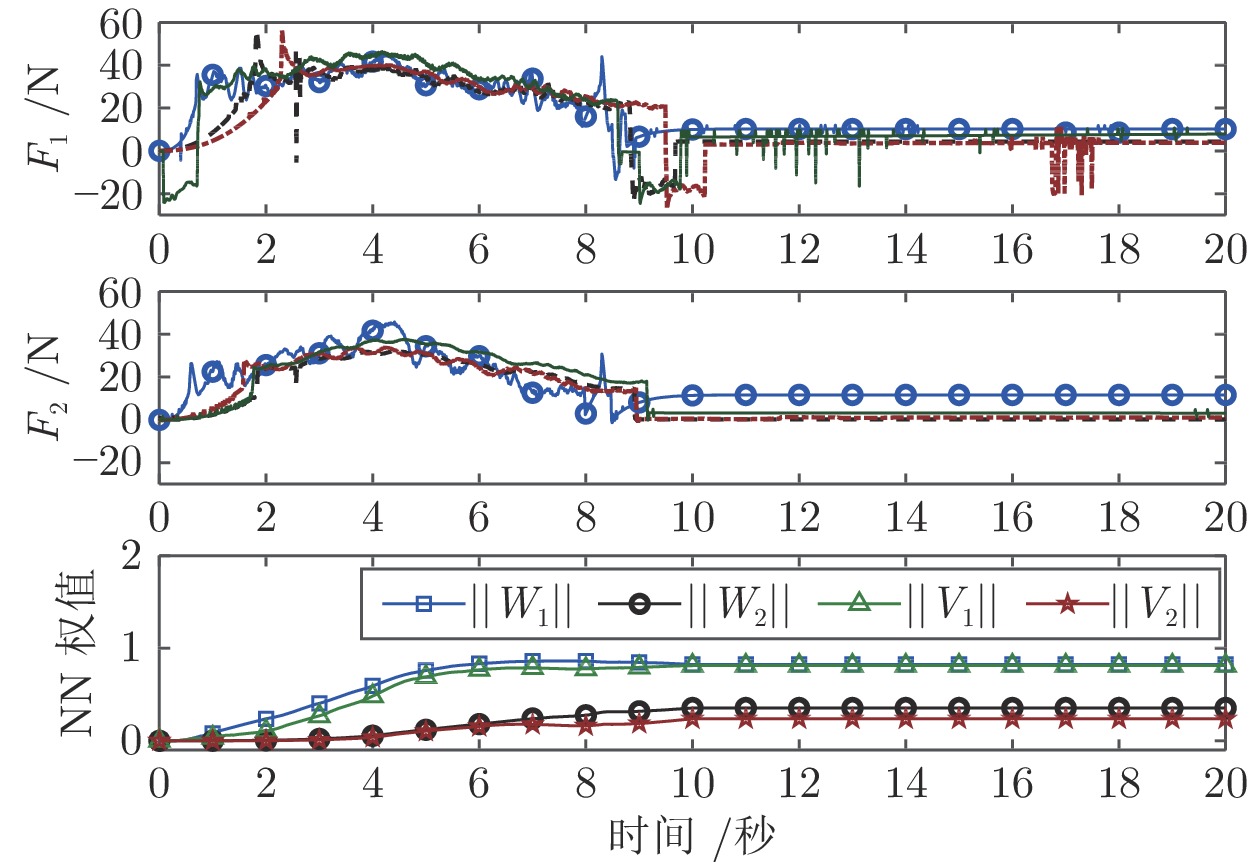
图 4 实验1: 系统控制输入
$F_1$ 、$F_2$ 和神经网络权值$W_1$ 、$W_2$ 、$V_1$ 、$V_2$ 的范数Fig. 4 Experiment 1: The control input
$F_1,\ F_2$ of system and the norm of the NN weights$W_1,\ W_2,\ V_1,\ V_2$ 表 1 实验1的性能指标
Table 1 Performance indices of Experiment 1
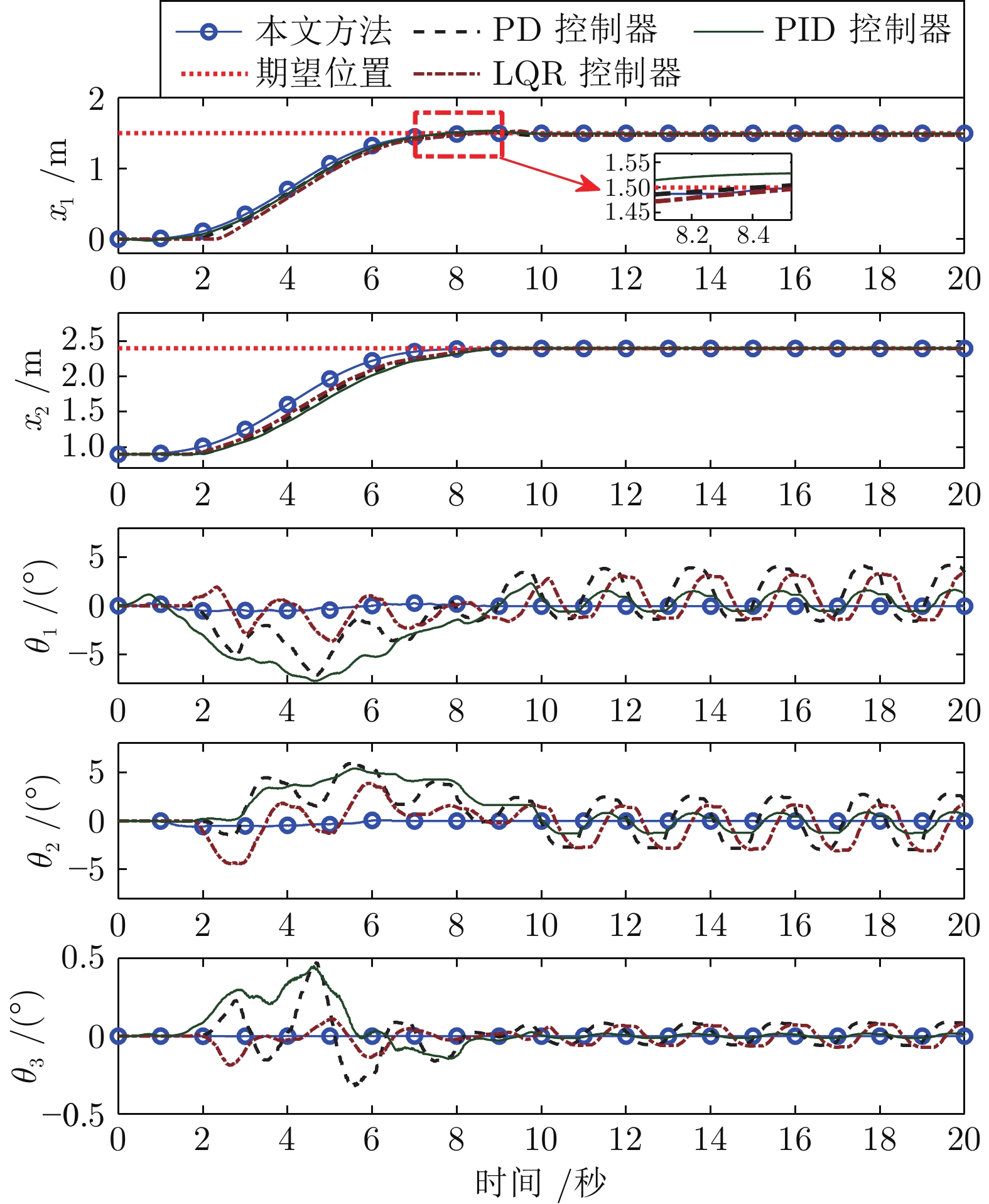
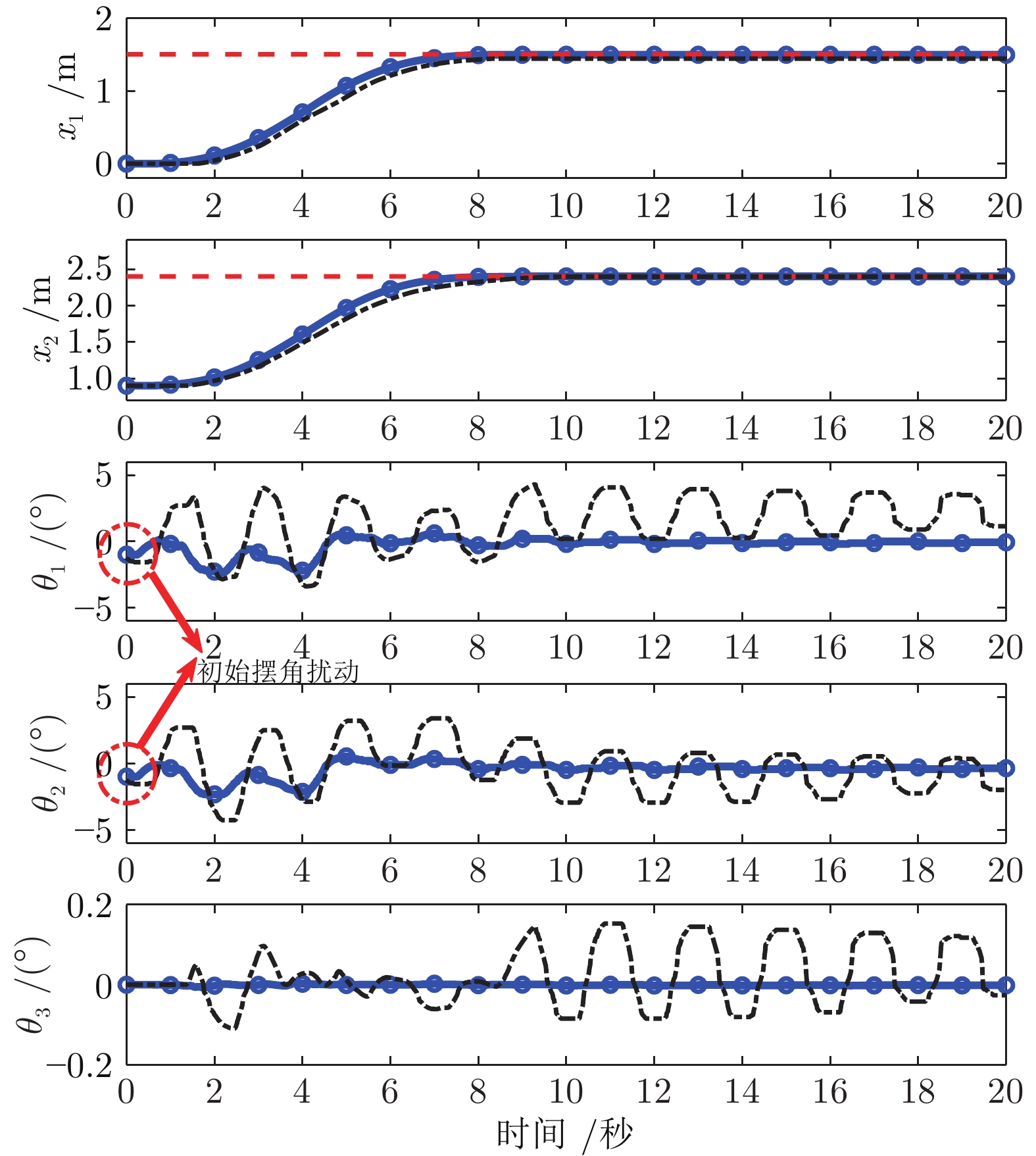
性能指标 本文方法 PD LQR PID SMC $e_{1xs}\,({\rm{ m}})$ ${\bf{-0.003}}$ −0.028 −0.032 −0.007 0.001 $e_{2xs}\,({\rm{ m}})$ −0.003 −0.004 −0.004 −0.004 ${\bf{-0.001}}$ $\theta_{1{\rm{max}}}\,(^\circ)$ ${\bf{0.582}}$ 7.149 3.666 7.746 1.357 $\theta_{2{\rm{max}}}\,(^\circ)$ ${\bf{0.636}}$ 5.908 4.387 5.401 2.481 $\theta_{3{\rm{max}}}\,(^\circ)$ ${\bf{0.002}}$ 0.472 0.187 0.452 0.056 $\theta_{1res}\,(^\circ)$ ${\bf{0.293}}$ 4.160 3.350 1.515 1.274 $\theta_{2res}\,(^\circ)$ ${\bf{0.000}}$ 2.926 3.053 1.273 1.145 $\theta_{3res}\,(^\circ)$ ${\bf{0.000}}$ 0.085 0.068 0.016 0.001 $\Delta_{x{\rm{max}}}\,({\rm{ m} })$ ${\bf{0.905}}$ 0.924 0.994 0.920 0.938 $\Delta_{x{\rm{min} } }\,({\rm{ m} })$ ${\bf{0.899}}$ 0.749 0.848 0.697 0.894  下载: 导出CSV
下载: 导出CSV
-
[1] Ramli L, Mohamed Z, Abdullahi A M, Jaafar H I, Lazim I M. Control strategies for crane systems: A comprehensive review. Mechanical Systems and Signal Processing, 2017, 95: 1-23 doi: 10.1016/j.ymssp.2017.03.015 [2] Lu B, Fang Y, Lin J, Hao Y, Cao H. Nonlinear antiswing control for offshore boom cranes subject to ship roll and heave disturbances. Automation in Construction, 2021, 131: 1-13 [3] Lu B, Fang Y. Gain-adapting coupling control for a class of underactuated mechanical systems. Automatica, 2021, 125: 1-7 [4] 王岳, 孙宁, 吴易鸣, 梁潇, 陈鹤, 方勇纯. 深海起重机系统的实时轨迹规划方法. 自动化学报, 2021, 47(12): 2761-2770Wang Yue, Sun Ning, Wu Yi-Ming, Liang Xiao, Chen He, Fang Yong-Chun. Real-time motion planning of deep sea-oriented flexible crane systems. Acta Automatica Sinica, 2021, 47(12): 2761-2770 [5] 曹海昕, 郝运嵩, 林静正, 卢彪, 方勇纯. 绳长时变情况下轮胎式集装箱起重机非线性防摆控制算法. 自动化学报, 2021, 47(8): 1876-1884Cao Hai-Xin, Hao Yun-Song, Lin Jing-Zheng, Lu Biao, Fang Yong-Chun. Nonlinear anti-swing control for rubber tyre container gantry crane with rope length variation. Acta Automatica Sinica, 2021, 47(8): 1876-1884 [6] Vaughan J, Yoo J, Singhose W. Using approximate multi-crane frequencies for input shaper design. In: Proceedings of the International Conference on Control, Automation and Systems. Jeju, South Korea: IEEE, 2012. 639−644 [7] 卢彪, 吴壮, 方勇纯, 孙宁. 带有完整约束的双吊车系统输入整形控制. 控制理论与应用, 2018, 35(12): 1805-1811Lu Biao, Wu Zhuang, Fang Yong-Chun, Sun Ning. Input shaping control for underactuated dual overhead crane system with holonomic constraints. Control Theory & Applications, 2018, 35(12): 1805-1811 [8] Zhao X, Huang J. Distributed-mass payload dynamics and control of dual cranes undergoing planar motions. Mechanical Systems and Signal Processing, 2019, 126: 636-648 doi: 10.1016/j.ymssp.2019.02.032 [9] Sun N, Fu Y, Yang T, Zhang J, Fang Y, Xin X. Nonlinear motion control of complicated dual rotary crane systems without velocity feedback: Design, analysis, and hardware experiments. IEEE Transactions on Automation Science and Engineering, 2020, 17(2): 1017-1029 doi: 10.1109/TASE.2019.2961258 [10] Li Y, Xi X, Xie J, Liu C. Study and implementation of a cooperative hoisting for two crawler cranes. Journal of Intelligent & Robotic Systems, 2016, 83(2): 165-178 [11] Lu B, Fang Y, Sun N. Modeling and nonlinear coordination control for an underactuated dual overhead crane system. Automatica, 2018, 91: 244-255 doi: 10.1016/j.automatica.2018.01.008 [12] Li D J. Neural network control for a class of continuous stirred tank reactor process with dead-zone input. Neurocomputing, 2014, 131: 453-459 doi: 10.1016/j.neucom.2013.11.006 [13] Selmic R R, Lewis F L. Deadzone compensation in motion control systems using neural networks. IEEE Transactions on Automatic Control, 2000, 45(4): 602-613 doi: 10.1109/9.847098 [14] Lewis L F, Yesildirek A, Liu K. Multilayer neural-net robot controller with guaranteed tracking performance. IEEE Transactions on Neural Networks, 1996, 7(2): 388-399 doi: 10.1109/72.485674 [15] Yang T, Sun N, Chen H, Fang Y. Neural network-based adaptive antiswing control of an underactuated ship-mounted crane with roll motions and input dead zones. IEEE Transactions on Neural Networks and Learning Systems, 2019, 31(3): 901-914 [16] 马乐, 闫一鸣, 徐东甫, 李志伟, 孙灵芳. 含未知动态与扰动的非线性系统神经网络嵌入学习控制. 自动化学报, 2021, 47(8): 2016-2028Ma Le, Yan Yi-Ming, Xu Dong-Fu, Li Zhi-Wei, Sun Ling-Fang. Neural network embedded learning control for nonlinear system with unknown dynamics and disturbance. Acta Automatica Sinica, 2021, 47(8): 2016-2028 [17] 章联生, 金耀初, 宋永端. 时滞忆阻神经网络动力学分析与控制综述. 自动化学报, 2021, 47(4): 765-779Zhang Lian-Sheng, Jin Yao-Chu, Song Yong-Duan. An overview of dynamics analysis and control of memristive neural networks with delays. Acta Automatica Sinica, 2021, 47(4): 765-779 [18] 林静正, 方勇纯, 卢彪, 郝运嵩, 曹海昕. 基于迭代学习和神经网络的船用起重机控制. 控制理论与应用, 2022, 39(4): 581–592Lin Jing-Zheng, Fang Yong-Chun, Lu Biao, Hao Yun-Song, Cao Hai-Xin. Controller design of an offshore boom crane utilizing iterative learning and neural network. Control Theory & Applications, 2022, 39(4): 581–592 [19] Lu B, Fang Y, Sun N. Sliding mode control for underactuated overhead cranes suffering from both matched and unmatched disturbances. Mechatronics, 2017, 47: 116-125 doi: 10.1016/j.mechatronics.2017.09.006 -

 下载:
下载:










图(7) / 表(1)
计量
- 文章访问数: 1030
- HTML全文浏览量: 399
- PDF下载量: 399
- 被引次数: 0
