

Review on Intelligent Autonomous Control for Spacecraft Confronting Orbital Threats
-
摘要: 当前, 轨道空间日益拥挤、太空竞争不断加剧, 对航天器执行既定任务时的轨道威胁自主应对能力提出了新的挑战, 使得航天器智能自主控制技术迎来新的发展机遇. 在调研分析了轨道威胁感知、自主决策规划、规避机动动作执行、自主控制系统架构相关研究进展的基础上, 总结提出了威胁规避智能自主控制面临的主要瓶颈问题, 并分析指出发展“感知−决策−执行”一体化控制是破解瓶颈难题的有效手段, 最后从一体化控制系统建模、设计、分析与验证多方面, 系统讨论了威胁规避智能自主控制需要重点关注的若干基础问题, 为未来航天器智能自主控制的理论研究和技术发展提供启发和参考.
-
关键词:
- 轨道威胁感知 /
- 自主决策规划 /
- “感知−决策−执行”一体化 /
- 航天器智能自主控制
Abstract: At present, the safe operations of spacecraft are facing severe challenges due to the increasingly congested orbital space and intensified space competition, which poses new challenges to the ability of spacecraft to autonomously cope with orbital threats while carrying out established missions, and at the same time, brings new development opportunities to intelligent autonomous control technologies of spacecraft. Under such a circumstance, after summarizing the current trends of orbital threat perception, spacecraft autonomous decision-making and planning, collision avoidance maneuvers, and autonomous control system architecture design, we analyze the main bottleneck problems in the intelligent autonomous control for spacecraft confronting orbital threats, and then propose that developing the integrated “perception-decision-action” control system is an effective means to solve the bottleneck problems. Furthermore, we systematically discuss the basic theoretical issues that need to be addressed in the intelligent autonomous control of threat avoidance from the aspects of integrated control system modeling, design, analysis and verification. -
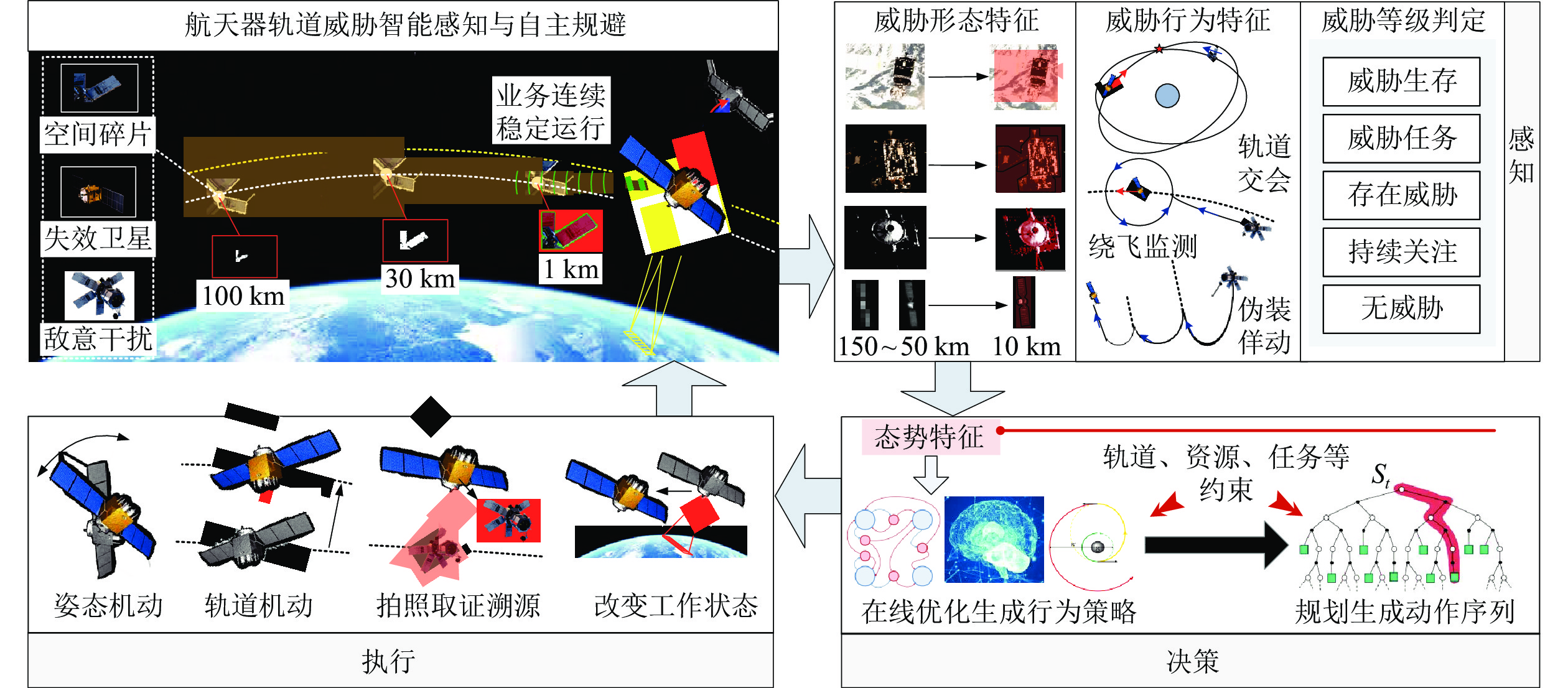
图 1 面向轨道威胁的航天器 “感知−决策−执行” 星上闭环过程
Fig. 1 Spacecraft on-board “perception-decision-action” closed-loop process for orbital threats
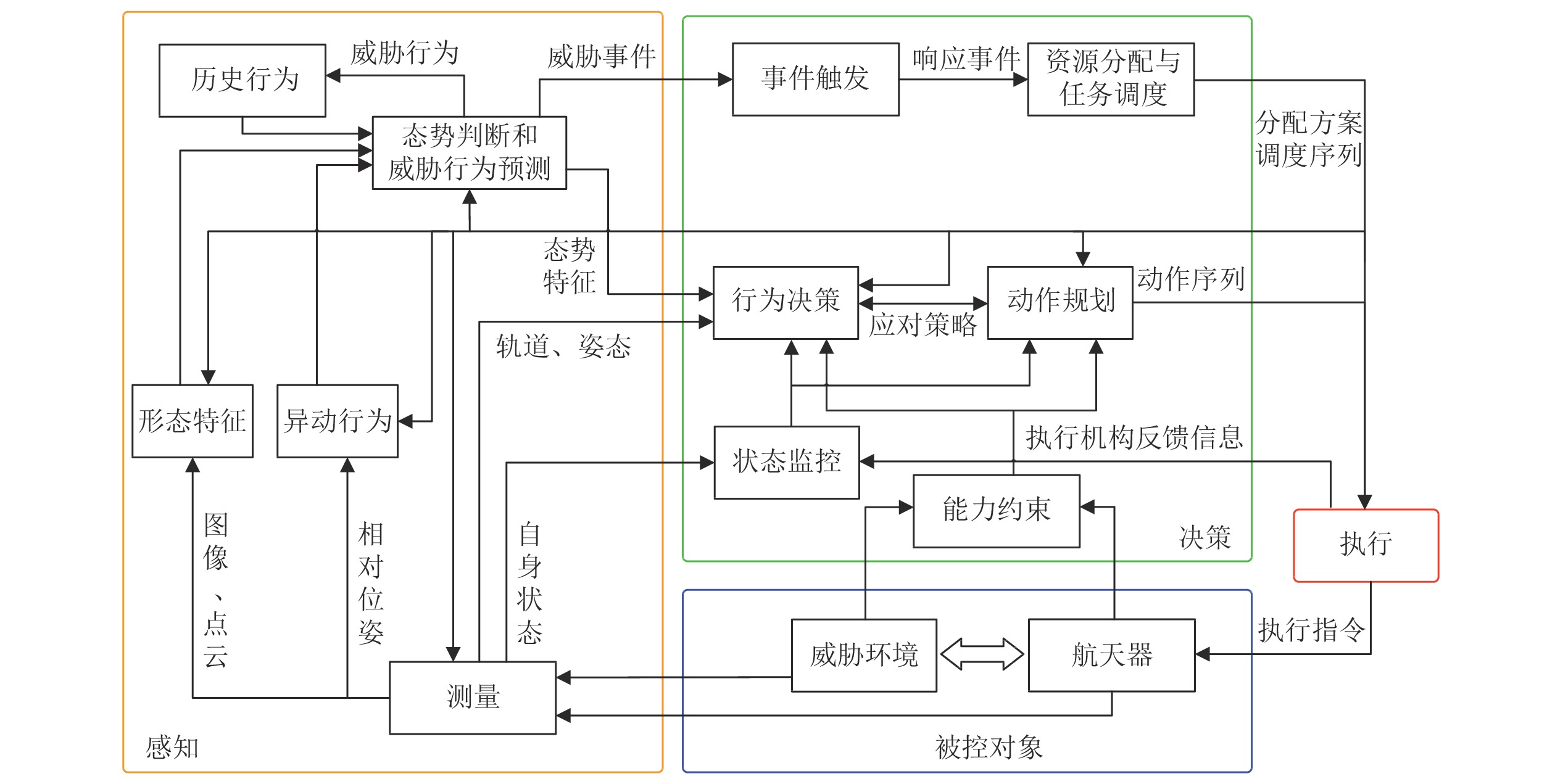
图 2 航天器“感知−决策−执行”一体化控制系统逻辑架构示意图
Fig. 2 Logical architecture diagram of spacecraft “perception-decision-action” integrated control system
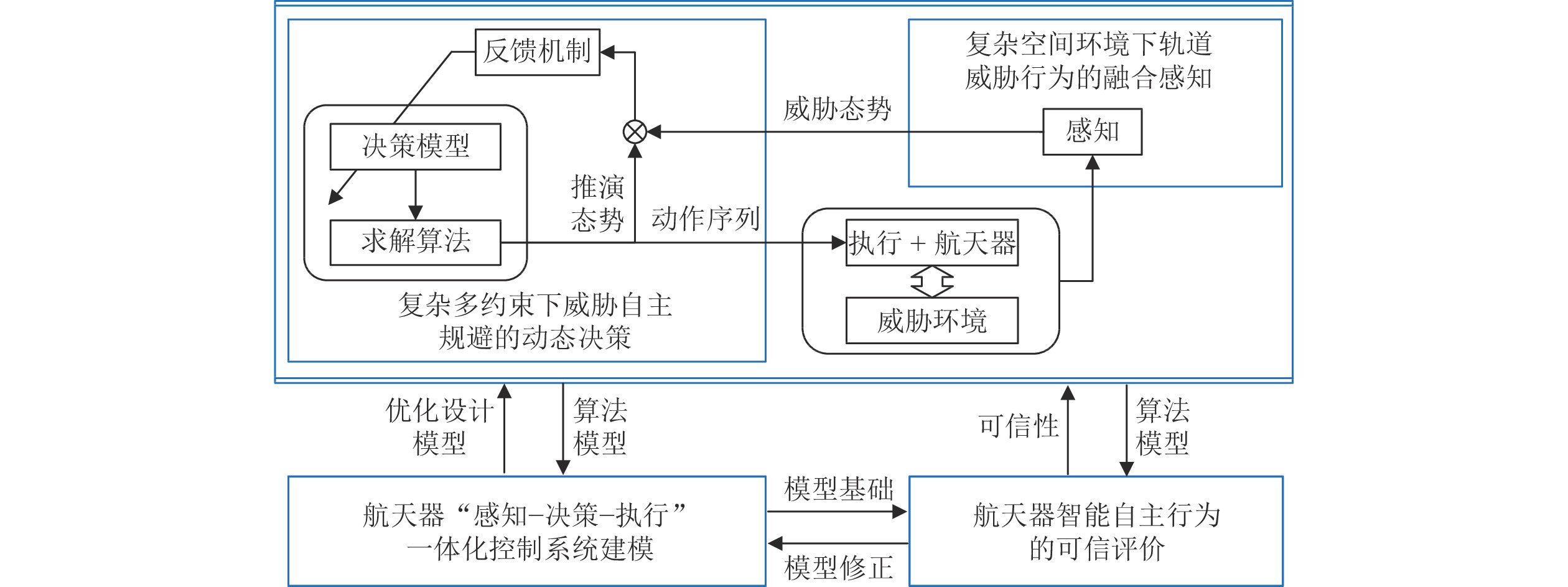
图 3 4个方面基础问题之间的相互关系示意图
Fig. 3 Schematic diagram of the relationship between the four basic theoretical questions
表 1 分层递阶式架构与反应式架构优缺点对比[162]
Table 1 Comparison of advantages and disadvantages of hierarchical architecture and reactive one[162]
序号 架构类型 项目名称 描述 1 分层递阶式架构 优势
不足易实现高等智能
缺乏实时性和灵活性, 可靠性不高2 反应式架构 优势
不足实时性强
多控制回路对同一执行机构存在争夺冲突, 系统可预测性差、缺乏高等级智能 下载: 导出CSV
下载: 导出CSV
表 2 航天器自身及其运行环境的特点
Table 2 Characteristics of the spacecraft and its operating environment
项目名称 特点描述 硬件可维护性 服役周期长, “运载 + 维护”成本高, 维修操作技术难度大, 需要长时间以“不变的硬件”适应“多变的威胁” 星上资源 星上敏感器、计算、存储等资源严重受限 (计算处理能力400 ~ 1000百万次/秒)
需要统筹优化软硬件资源, 动态协调、消解冲突, 降低对星上资源的依赖光照条件 空间成像条件恶劣, 目标反射不均匀导致局部图像过亮或过暗、成像连续性差; 地影区导致不可观测弧段长; 色彩单一、信息量有限 威胁行为特征 交会、绕飞、佯动等威胁行为特征不明显, 需要长期关注多类特征, 给出综合判断 时间跨度 威胁影响存续时间长(威胁产生、变化、消失的全生命周期) 空间跨度 目标测量从米级到千公里量级, 远距离时成像分辨率低、只有方位信息, 且往往具有稀疏性 轨道约束 轨道速度大, 横向机动能力弱(典型卫星横向机动加速度最大0.01 ~ 0.05 m/s2), 变轨代价高
下载: 导出CSV
-
[1] Liou J C. Risks from orbital debris and space situational awareness. In: Proceedings of the 2nd IAA Conference on Space Situational Awareness. Washington DC, USA: 2020. Article No. 76975 [2] Droegemeier K, Lattimore T, Diana G, Bryan W, Lei J F, Miles A, et al. National Orbital Debris Research and Development Plan, Orbital Debris Research and Development Interagency Working Group, Subcommittee on Space Weather, Security, and Hazards, Committee on Homeland and National Security of the National Science and Technology Council, USA, 2021 [3] Anz-Meador P. International space station maneuvers to avoid debris. Orbital Debris Quarterly News, 2020, 24(3): 1-3 [4] Moranta S, Hrozensky T, Dvoracek M. Towards a European Approach to Space Traffic Management, ESPI Report 71, Eur-opean Space Policy Institute, Austria, 2020 [5] Roulette J. OneWeb, SpaceX satellites dodged a potential collision in orbit [Online], available: https://www.theverge.com/2021/4/9/22374262/oneweb-spacex-satellites-dodged-potential-collision-orbit-space-force, August 17, 2022 [6] 陆晓飞, 孟红波, 梅发国. 从美军“施里弗”系列演习看太空作战趋势. 中国电子科学研究院学报, 2020, 15(2): 110-114, 146Lu Xiao-Fei, Meng Hong-Bo, Mei Fa-Guo. Analysis of space warfare trend from the U.S. army's Schiever wargame. Journal of China Academy of Electronics and Information Technology, 2020, 15(2): 110-114, 146 [7] Geosynchronous space situational awareness program [Online], available: https://www.afspc.af.mil/About-Us/Fact-Sheets/Art-icle/730802/geosynchronous-space-situational-awareness-program/, August 17, 2022 [8] Angles [Online], available: https://space.skyrocket.de/doc_sdat/angels.htm, August 17, 2022 [9] Eagle-satellite space experiment [Online], available: https://afresearchlab.com/technology/space-vehicles/eagle/, August 17, 2022 [10] 宫经刚, 宁宇, 吕楠. 美国高轨天基态势感知技术发展与启示. 空间控制技术与应用, 2021, 47(1): 1-7Gong Jing-Gang, Ning Yu, Lv Nan. Development and enlightenment of space based situational awareness technology for high orbit in the United States. Aerospace Control and Application, 2021, 47(1): 1-7 [11] Martin M, Pfrang K, Weeden B. U.S military and intelligence rendezvous and proximity operations in space. Secure World Foundation, 2021: 1-4 [12] 袁利. 面向不确定环境的航天器智能自主控制技术. 宇航学报, 2021, 42(7): 839-849Yuan Li. Spacecraft intelligent autonomous control technology toward uncertain environment. Journal of Astronautics, 2021, 42(7): 839-849 [13] Braun V, Flohrer T, Krag H, Merz K, Lemmens S, Virgili B B, et al. Operational support to collision avoidance activities by ESA's space debris office. CEAS Space Journal, 2016, 8(3): 177-189 doi: 10.1007/s12567-016-0119-3 [14] Merz K, Virgili B B, Braun V, Flohrer T, Funke Q, Krag H, et al. Current collision avoidance service by ESA's space debris office. In: Proceedings of the 7th European Conference on Sp-ace Debris. Darmstadt, Germany: 2017. 18−21 [15] Fernholz T. SpaceX's new satellites will dodge collisions autonomously [Online], available: https://qz.com/1627570/how-autonomous-are-spacexs-starlink-satellites/, August 17, 2022 [16] ESA Safety & Security. Automating collision avoidance [Online], available: https://www.esa.int/Safety_Security/Space_Debris/Automatin-g_collision_avoidance, August 17, 2022 [17] Virgili B B, Flohrer T, Krag H, Merz K, Lemmens S. CREAM-ESA's proposal for collision risk estimation and automated mitigation. In: Proceedings of the 1st International Orbital Debris Conference. Sugar Land, USA: 2019. 6031 [18] Yang J C. Development of intelligent autonomous control technology for the Chinese space program. In: Proceedings of the IFAC Conference on Intelligent Autonomous Control in Aero-space. Beijing, China: 1995. 1−4 [19] 袁利, 黄煌. 空间飞行器智能自主控制技术现状与发展思考. 空间控制技术与应用, 2019, 45(4): 7-18Yuan Li, Huang Huang. Current trends of spacecraft intelligent autonomous control. Aerospace Control and Application, 2019, 45(4): 7-18 [20] Steinberg A N, Bowman C L, White F E. Revisions to the JDL data fusion model. In: Proceedings of the SPIE Conference on Sensor Fusion: Architecture, Algorithms, and Applications III. Oriando, USA: 1999. 430−441 [21] 刘熹, 赵文栋, 徐正芹. 战场态势感知与信息融合. 北京: 清华大学出版社, 2019.Liu Xi, Zhao Wen-Dong, Xu Zheng-Qin. Battlefield Situational Awareness and Information Fusion. Beijing: Tsinghua University Press, 2019. [22] Endsley M R. Design and evaluation for situation awareness enhancement. In: Proceedings of the Human Factor Society Annual Meeting. Los Angeles, USA: 1988. 97−101 [23] Pesce V, Lavagna M, Bevilacqua R. Stereo vision-based pose and inertia estimation of unknown and uncooperative space objects. Advances in Space Research, 2017, 59(1): 236-251 doi: 10.1016/j.asr.2016.10.002 [24] 韩飞, 刘付成, 王兆龙, 杜宣, 刘珊珊, 刘超镇. 空间多机器人协同的多视线仅测角相对导航. 航空学报, 2021, 42(1): 524174Han Fei, Liu Fu-Cheng, Wang Zhao-Long, Du Xuan, Liu Shan-Shan, Liu Chao-Zhen. Multi light-of-sight angles-only relative navigation by multi collaborative robot. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 524174 [25] Zhang Y Z, Huang P F, Song K H, Meng Z J. An angles-only navigation and control scheme for non-cooperative rendezvous operations. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8618-8627 doi: 10.1109/TIE.2018.2884213 [26] Grzymisch J, Fichter W. Observability criteria and unobservable maneuvers for in-orbit bearings-only navigation. Journal Guidance Control and Dynamics, 2014, 37(4): 1250-1259 doi: 10.2514/1.62476 [27] Anjaly P, Ratnoo A. Observability enhancement of maneuvering target with bearings-only information. Journal of Guidance, Control, and Dynamics, 2018, 41(1): 184-198 doi: 10.2514/1.G003003 [28] Gao Y, You Z, Liu J, Xu B. The influence of orbital maneuver on autonomous orbit determination of an extended satellite navigation constellation. Advances in Space Research, 2021, 67(6): 1733-1742 doi: 10.1016/j.asr.2020.12.020 [29] Klein I, Geller D K. Zero Δv solution to the angles-only range observability problem during orbital proximity operations. Advances in Estimation, Navigation, and Spacecraft Control, 2015, 351-369 [30] Gaias G, D’Amico S, Ardaens J S. Angles-only navigation to a noncooperative satellite using relative orbital elements. Journal of Guidance, Control, and Dynamics, 2014, 37(2): 439-451 doi: 10.2514/1.61494 [31] Li F, Cao X, You Y, Zhang J. Case study: Feasibility analysis of close-in proximity operations using angles-only navigation. Transactions of the Japan Society for Aeronautical and Space Sciences, 2020, 63(2): 31-41 doi: 10.2322/tjsass.63.31 [32] Roberts T, Linares R. Geosynchronous satellite maneuver classification via supervised machine learning. In: Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference. Maui, USA: 2021. [33] 刘磊, 曹建峰, 刘也. 仅天基测角跟踪的轨道机动WFMHT检测方法. 西北工业大学学报, 2018, 36(6): 1185-1192 doi: 10.1051/jnwpu/20183661185Liu Lei, Cao Jian-Feng, Liu Ye. WFMHT method of orbit maneuver detection based on space-based bearing-only measurement. Journal of Northwestern Polytechnical University, 2018, 36(6): 1185-1192 doi: 10.1051/jnwpu/20183661185 [34] Lowe D G. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60(2): 91-110 doi: 10.1023/B:VISI.0000029664.99615.94 [35] Lowe D G. Object recognition from local scale-invariant features. In: Proceedings of the 7th IEEE International Conference on Computer Vision. Kerkyra, Greece: 1999. 1150−1157 [36] Bay H, Tuytelaars T, Gool L V. Surf: Speeded up robust features. In: Proceedings of the 9th European Conference on Computer Vision. Graz, Austria: 2006. 404−417 [37] Matas J, Chum O, Urban M, Pajdla T. Robust wide-baseline stereo from maximally stable extremal regions. Image and Vision Computing, 2004, 22(10): 761-767 doi: 10.1016/j.imavis.2004.02.006 [38] Calonder M, Lepetit V, Strecha C, Fua P. Brief: Binary robust independent elementary features. In: Proceedings of the 11th European Conference on Computer Vision. Heraklion, Greece: 2010. 778−792 [39] Cropp A. Pose Estimation and Relative Orbit Determination of a Nearby Target Microsatellite Using Passive Imagery [Ph.D. dissertation], University of Surrey, UK, 2001 [40] Du X, Liang B, Xu W, Qiu Y. Pose measurement of large non-cooperative satellite based on collaborative cameras. Acta Astronautica, 2011, 68(11-12): 2047-2065 doi: 10.1016/j.actaastro.2010.10.021 [41] Cassinis L P, Fonod R, Gill E. Review of the robustness and applicability of monocular pose estimation systems for relative navigation with an uncooperative spacecraft. Progress in Aerospace Sciences, 2019, 110: 100548 doi: 10.1016/j.paerosci.2019.05.008 [42] Sharma S, Beierle C, D'Amico S. Pose estimation for non-cooperative spacecraft rendezvous using convolutional neural networks. In: Proceedings of the IEEE Aerospace Conference. Montana, USA: 2018. 1−12 [43] Mahendran S, Ali H, Vidal R. 3D pose regression using convolutional neural networks. In: Proceedings of the IEEE International Conference on Computer Vision Workshops. Venice, Italy: 2017. 2174−2182 [44] Sharma S, D'Amico S. Neural network-based pose estimation for noncooperative spacecraft rendezvous. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(6): 4638-4658 doi: 10.1109/TAES.2020.2999148 [45] Black K, Shankar S, Fonseka D, Deutsch J, Dhir A, Akella M R. Real-time, flight-ready, non-cooperative spacecraft pose estimation using monocular imagery. arXiv preprint arXiv: 2101.09553v1, 2021. [46] Jaritz M, Charette R D, Wirbel E, Perrotton X, Nashashibi F. Sparse and dense data with CNNs: Depth completion and semantic segmentation. In: Proceedings of the 6th International Conference on 3D Vision. Verona, Italy: 2018. 52−60 [47] Valada A, Mohan R, Burgard W. Self-supervised model adaptation for multi-modal semantic segmentation. International Journal of Computer Vision, 2020, 128(5): 1239-1285 doi: 10.1007/s11263-019-01188-y [48] Velasquez A, Luckett J, Napolititano M. Experimental evaluation of a machine vision based pose estimation system for autonomous capture of satellites with interface rings. In: Proceedings of the AIAA Guidance, Navigation and Control Conf-erence. Boston, USA: 2013. Article No. 4758 [49] Trajkovic M, Hedley M. Fast corner detection. Image and Vision Computing, 1988, 16(2): 75-87 [50] Harris C, Stephens M. A combined corner and edge detector. In: Proceedings of the 4th Alvey Vision Conference. Manches-ter, UK: 1988. 147−152 [51] 李林泽, 张涛. 基于深度学习的空间非合作目标特征检测与识别. 智能系统学报, 2020, 15(6): 1154-1162Li Lin-Ze, Zhang Tao. Feature detection and recognition of spatial noncooperative objects based on deep learning. CAAI Transactions on Intelligent Systems, 2020, 15(6): 1154-1162 [52] 王柳. 基于深度学习的空间多目标识别方法研究. 无人系统技术, 2020, 15(6): 1154-1162Wang Liu. Research on spatial multi-objective recognition based on deep learning. Unmanned Systems Technology, 2020, 15(6): 1154-1162 [53] Chen Y, Gao J, Zhang K. R-CNN-based satellite components detection in optical images. International Journal of Aerospace Engineering, 2020. 8816187 [54] 宋杰. 基于深度模型的零样本迁移学习 [博士论文], 浙江大学, 中国, 2020Song Jie. Zero-Shot Transfer Learning Based on Deep Models [Ph.D. dissertation], Zhejiang University, China, 2020 [55] Simonyan K, Zisserman A. Two-stream convolutional networks for action recognition in videos. In: Proceedings of the 27th International Conference on Neural Information Processing Systems. Montreal, Canada: 2014. 568−576 [56] Wang L M, Xiong Y J, Wang Z, Qiao Y, Lin D H, Tang X O, et al. Temporal segment networks: Towards good practices for deep action recognition. In: Proceedings of the 14th European Conference on Computer Vision. Amsterdam, Netherlands: 2016. 20−36 [57] 孙健, 邓方, 陈杰. 陆用运动体控制系统发展现状与趋势. 自动化学报, 2018, 44(11): 1985-1999Sun Jian, Deng Fang, Chen Jie. Control system of ground-based moving platforms: State of the art and future trends. Acta Automatica Sinica, 2018, 44(11): 1985-1999 [58] Carling R L. Naval situation assessment using a real-time knowledge-based system. Naval Engineering Journal, 1999, 111(3): 173-187 doi: 10.1111/j.1559-3584.1999.tb01971.x [59] Zhang W, Hill R W. A template-based and pattern-driven application to situation awareness and assessment in virtual humans. In: Proceedings of the 4th International Conference on Autonomous Agents. Barcelona, Spain: 2000. 116−123 [60] Pearl J. Fusion, propagation, and structuring in belief networks. Artificial Intelligence, 1986, 29(3): 241-288 doi: 10.1016/0004-3702(86)90072-X [61] Zaidi N A, Webb G I, Carman M J, Petitjean F, Buntine W, Hynes M, et al. Efficient parameter learning of Bayesian network classifiers. Machine Learning, 2017, 106(9): 1289-1329 [62] Di R, Gao X, Guo Z. Learning Bayesian network parameters under new monotonic constraints. Journal of Systems Engineering and Electronics, 2017, 28(6): 1248-1255 doi: 10.21629/JSEE.2017.06.22 [63] You Y, Li J, Shen L. An effective Bayesian network parameters learning algorithm for autonomous mission decision-making under scarce data. International Journal of Machine Learning and Cybernetics, 2019, 10(3): 549-561 doi: 10.1007/s13042-017-0737-x [64] Hou Y, Zheng E, Guo W, Xiao Q, Xu Z. Learning Bayesian network parameters with small data set: A parameter extension under constraints method. IEEE Access, 2020, 8: 24979-24989 doi: 10.1109/ACCESS.2020.2971099 [65] Wang M, Luo J, Walter U. A non-linear model predictive controller with obstacle avoidance for a space robot. Advances in Space Research, 2016, 57(8): 1737-1746 doi: 10.1016/j.asr.2015.06.012 [66] Weiss A, Baldwin M, Erwin R S, Kolmanovsky I. Model predictive control for spacecraft rendezvous and docking: Strategies for handling constraints and case studies. IEEE Transactions on Control Systems Technology, 2015, 23(4): 1638-1647 doi: 10.1109/TCST.2014.2379639 [67] Bombardelli C, Hernando-Ayuso J. Optimal impulsive collision avoidance in low earth orbit. Journal of Guidance, Control, and Dynamics, 2015, 38(2): 217-225 doi: 10.2514/1.G000742 [68] Gonzalo J L, Colombo C, Di Lizia P. Analytical framework for space debris collision avoidance maneuver design. Journal of Guidance, Control, and Dynamics, 2021, 44(3): 469-487 doi: 10.2514/1.G005398 [69] Kim E H, Kim H D, Kim H J. A study on the collision avoidance maneuver optimization with multiple space debris. Journal of Astronomy and Space Sciences, 2012, 29(1): 11-21 doi: 10.5140/JASS.2012.29.1.011 [70] Cao L, Qiao D, Xu J. Suboptimal artificial potential function sliding mode control for spacecraft rendezvous with obstacle avoidance. Acta Astronautica, 2018, 143: 133-146 doi: 10.1016/j.actaastro.2017.11.022 [71] Mancini M, Bloise N, Capello E, Punta E. Sliding mode control techniques and artificial potential field for dynamic collision avoidance in rendezvous maneuvers. IEEE Control Systems Letters, 2020, 4(2): 313-318 doi: 10.1109/LCSYS.2019.2926053 [72] Li Q, Zhang B, Yuan J, Wang H. Potential function based robust safety control for spacecraft rendezvous and proximity operations under path constraint. Advances in Space Research, 2018, 62(9): 2586-2598 doi: 10.1016/j.asr.2018.08.003 [73] Hamed A R, Omer A A, Ashry M, Badawy A. Optimized curvilinear potential field based multi-objective satellite collision avoidance maneuver. In: Proceedings of the IEEE Aerospace Conference. Montana, USA: 2020. 1−9 [74] Zhu W, Pang Z, Si J, Du Z. Collision response and obstacle avoidance of the tethered-space net robot system with non-target objects. Aircraft Engineering and Aerospace Technology, 2022, 94(5): 715-733. doi: 10.1108/aeat-07-2021-0208 [75] Steiner J A, He X, Bourne J R, Leang K K. Open-sector rapid-reactive collision avoidance: Application in aerial robot navigation through outdoor unstructured environments. Robotics and Autonomous Systems, 2019, 112: 211-220 doi: 10.1016/j.robot.2018.11.016 [76] Zhang S, Yu J, Mei Y, Sun H, Du Y. Unmanned aerial vehicle trajectory planning by an integrated algorithm in a complex obstacle environment. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2017, 231(11): 2048-2067 doi: 10.1177/0954410016662058 [77] Wu J, Wang H, Zhang M, Yu Y. On obstacle avoidance path planning in unknown 3D environments: A fluid-based framework. ISA Transactions, 2021, 111: 249-264 doi: 10.1016/j.isatra.2020.11.017 [78] Cheng S, Li L, Liu Y G, Li W B, Guo H Q. Virtual fluid-flow-model-based lane-keeping integrated with collision avoidance control system design for autonomous vehicles. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(10): 6232-6241 [79] 吴健发, 王宏伦, 王延祥, 刘一恒. 无人机反应式扰动流体路径规划. 自动化学报, DOI: 10.16383/j.aas.c210231 Wu Jian-Fa, Wang Hong-Lun, Wang Yan-Xiang, Liu Yi-Heng. UAV reactive interfered fluid path planning. Acta Automatica Sinica, DOI:10.16383/j.aas.c210231 [80] 赵力冉, 党朝辉, 张育林. 空间轨道博弈: 概念、原理与方法. 指挥与控制学报, 2021, 7(3): 215-224Zhao Li-Ran, Dang Zhao-Hui, Zhang Yu-Lin. Orbital game: Concepts, principles and methods. Journal of Command and Control, 2021, 7(3): 215-224 [81] 罗亚中, 李振瑜, 祝海. 航天器轨道追逃微分对策研究综述. 中国科学: 技术科学, 2020, 50(12): 1533-1545 doi: 10.1360/SST-2019-0174Luo Ya-Zhong, Li Zhen-Yu, Zhu Hai. Survey on spacecraft orbital pursuit-evasion differential games. Scientia Sinica Technologica, 2020, 50(12): 1533-1545 doi: 10.1360/SST-2019-0174 [82] Jagat A, Sinclair A J. Nonlinear control for spacecraft pursuit-evasion game using the state-dependent Riccati equation method. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(6): 3032-3042 doi: 10.1109/TAES.2017.2725498 [83] Li Z, Zhu H, Yang Z, Luo Y Z. A dimension-reduction solution of free-time differential games for spacecraft pursuit-evasion. Acta Astronautica, 2019, 163: 201-210 doi: 10.1016/j.actaastro.2019.01.011 [84] Liu Y, Li R, Hu L, Cai Z Q. Optimal solution to orbital three-player defense problems using impulsive transfer. Soft Computing, 2018, 22(9): 2921-2934 doi: 10.1007/s00500-017-2545-3 [85] Liang H, Wang J, Liu J, Liu P. Guidance strategies for interceptor against active defense spacecraft in two-on-two engagement. Aerospace Science and Technology, 2020, 96: 105529 doi: 10.1016/j.ast.2019.105529 [86] Venigalla C, Scheeres D. Spacecraft rendezvous and pursuit/ evasion analysis using reachable sets. In: Proceedings of the 28th AIAA/AAS Space Flight Mechanics Meeting. Kissimmee, USA: 2018. Article No. 0219 [87] Li Z, Zhu H, Luo Y. An escape strategy in orbital pursuit-evasion games with incomplete information. Science China Technological Sciences, 2021, 64(3): 559-570 doi: 10.1007/s11431-020-1662-0 [88] 李皓皓, 张进, 罗亚中. 基于机动目标滤波估计的航天器主动规避策略. 力学学报, 2020, 52(6): 1560-1568Li Hao-Hao, Zhang Jin, Luo Ya-Zhong. Spacecraft evasion strategy using active maneuvers based on maneuvering-target acceleration estimation. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(6): 1560-1568 [89] Ye D, Tang X, Sun Z, Wang C. Multiple model adaptive intercept strategy of spacecraft for an incomplete-information game. Acta Astronautica, 2021, 180: 340-349 doi: 10.1016/j.actaastro.2020.12.015 [90] Tang X, Ye D, Huang L, Sun Z, Sun J. Pursuit-evasion game switching strategies for spacecraft with incomplete-information. Aerospace Science and Technology, 2021, 119: 107112 doi: 10.1016/j.ast.2021.107112 [91] 刘冰雁, 叶雄兵, 高勇, 王新波, 倪蕾. 基于分支深度强化学习的非合作目标追逃博弈策略求解. 航空学报, 2020, 41(10): 324040Liu Bing-Yan, Ye Xiong-Bin, Gao Yong, Wang Xin-Bo, Ni Lei. Strategy solution of non-cooperative target pursuit-evasion game based on branching deep rein-forcement learning. Acta Aeronautica et Astronautica Sinica, 2020, 41(10): 324040 [92] Liu B, Ye X, Dong X, Ni L. Branching improved Deep Q Networks for solving pursuit-evasion strategy solution of spacecraft. Journal of Industrial and Management Optimization, 2022, 18(2): 1223-1245 doi: 10.3934/jimo.2021016 [93] 吴其昌, 李彬, 李君, 张洪波. 基于深度神经网络的无限时域型航天器追逃策略求解. 航天控制, 2019, 37(6): 13-18Wu Qi-Chang, Li Bin, Li Jun, Zhang Hong-Bo. Solution of infinite time domain spacecraft pursuit strategy based on deep neural network. Aerospace Control, 2019, 37(6): 13-18 [94] Oliveira T R, Rodrigues V H P, Krstić M, Basar T. Nash equilibrium seeking in quadratic non-cooperative games under two delayed information-sharing schemes. Journal of Optimization Theory and Applications, 2021, 191(2): 700-735 [95] 袁硕, 郭雷. 随机自适应动态博弈. 中国科学: 数学, 2016, 46(10): 1367-1382Yuan Shuo, Guo Lei. Stochastic adaptive dynamical games. Scientia Sinica Mathematica, 2016, 46(10): 1367-1382 [96] Basar T, Olsder G J. Dynamic Noncooperative Game Theory. Philadelphia: Society for Industrial and Applied Mathematics, 1999. [97] Branicky M S, Borkar V S, Mitter S K. A unified framework for hybrid control: Model and optimal control theory. IEEE Transactions on Automatic Control, 1998, 43(1): 31-45 doi: 10.1109/9.654885 [98] 袁利, 王淑一, 雷拥军. 航天器姿态敏捷稳健控制方法与应用. 北京: 科学出版社, 2021.Yuan Li, Wang Shu-Yi, Lei Yong-Jun. Agile and Robustifying Attitude Control of Spacecraft: Methods and Applications. Beijing: Science Press, 2021. [99] Pong C M, Miller D W. Reduced-attitude boresight guidance and control on spacecraft for pointing, tracking, and searching. Journal of Guidance, Control, and Dynamics, 2015, 38(6): 1027-1035 doi: 10.2514/1.G000264 [100] Wu Y H, Han F, Zheng M H, Wang F, Hua B, Chen Z M, et al. Attitude tracking control for a space moving target with high dynamic performance using hybrid actuator. Aerospace Science and Technology, 2018, 78: 102-117 doi: 10.1016/j.ast.2018.03.041 [101] Zhao C, Guo L. PID controller design for second order nonlinear uncertain system. Science China Information Science, 2017, 60(2): 022201 doi: 10.1007/s11432-016-0879-3 [102] Zhao C, Guo L. Control of nonlinear uncertain systems by extended PID. IEEE Transactions on Automatic Control, 2021, 66(8): 3840-3847 doi: 10.1109/TAC.2020.3030876 [103] 王璐, 郭毓, 吴益飞. SGCMGs驱动的挠性航天器有限时间自适应鲁棒控制. 自动化学报, 2021, 47(3): 641-651Wang Lu, Guo Yu, Wu Yi-Fei. Finite-time adaptive robust control for SGCMGs-based flexible spacecraft. Acta Automatica Sinica, 2021, 47(3): 641-651 [104] Wu J, Liu K, Han D. Adaptive sliding mode control for six-DOF relative motion of spacecraft with input constraint. Acta Astronautica, 2013, 87: 64-76 doi: 10.1016/j.actaastro.2013.01.015 [105] Liu Y, Jiang B, Lu J, Cao J, Lu G. Event-triggered sliding mode control for attitude stabilization of a rigid spacecraft. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 50(9): 3290-3299 [106] Liu E, Yan Y, Yang Y. Neural network approximation-based backstepping sliding mode control for spacecraft with input saturation and dynamics uncertainty. Acta Astronautica, 2022, 191: 1-10 doi: 10.1016/j.actaastro.2021.10.035 [107] Wu C S, Chen B S. Attitude control of spacecraft: Mixed H2/H∞ approach. Journal of Guidance, Control, and Dynamics, 2001, 24(4): 755-766 doi: 10.2514/2.4776 [108] Uang H J, Lien C C. Mixed H2/H∞ PID tracking control design for uncertain spacecraft systems using a cerebellar model articulation controller. IEE Proceedings-Control Theory and Applications, 2006, 153(1): 1-13 doi: 10.1049/ip-cta:20050172 [109] Liu C, Ye D, Shi K, Sun Z. Robust high-precision attitude control for flexible spacecraft with improved mixed H2/H∞ control strategy under poles assignment constraint. Acta Astronautica, 2017, 136: 166-175 doi: 10.1016/j.actaastro.2017.03.009 [110] Yang Y. Analytic LQR design for spacecraft control system based on quaternion model. Journal of aerospace engineering, 2012, 25(3): 448-453 doi: 10.1061/(ASCE)AS.1943-5525.0000142 [111] Zou A M, de Ruiter A H J, Kumar K D. Disturbance observer-based attitude control for spacecraft with input MRS. IEEE Transactions on Aerospace and Electronic systems, 2018, 55(1): 384-396 [112] Ran D, Chen X, de Ruiter A, Xiao B. Adaptive extended-state observer-based fault tolerant attitude control for spacecraft with reaction wheels. Acta Astronautica, 2018, 145: 501-514 doi: 10.1016/j.actaastro.2018.01.021 [113] Zhang J, Biggs J D, Ye D, Sun Z. Extended-state-observer-based event-triggered orbit-attitude tracking for low-thrust spacecraft. IEEE Transactions on Aerospace and Electronic Systems, 2019, 56(4): 2872-2883 [114] Gao C, Yuan J P, Zhao Y K. ADRC for spacecraft attitude and position synchronization in libration point orbits. Acta Astronautica, 2018, 145: 238-249 doi: 10.1016/j.actaastro.2018.01.039 [115] Xia Y Q, Chen R F, Pu F, Dai L. Active disturbance rejection control for drag tracking in Mars entry guidance. Advances in Space Research, 2014, 53: 853-861 doi: 10.1016/j.asr.2013.12.008 [116] Gao S D, Jing Y W, Dimirovski G M, Zheng Y. Adaptive fuzzy fault-tolerant control for the attitude tracking of spacecraft within finite time. Acta Astronautica, 2021, 189: 166-180 doi: 10.1016/j.actaastro.2021.08.033 [117] Shen G H, Xia Y Q, Ma D L, Zhang J H. Adaptive sliding-mode control for Mars entry trajectory tracking with finite-time convergence. International Journal of Robust and Nonlinear Control, 2019, 29(5): 1249-1264 doi: 10.1002/rnc.4433 [118] 吴宏鑫, 胡军, 解永春. 基于特征模型的智能自适应控制. 北京: 中国科学技术出版社, 2009.Wu Hong-Xin, Hu Jun, Xie Yong-Chun. Characteristic Model-Based Intelligent Adaptive Control. Beijing: China Science and Technology Press, 2009. [119] 解永春, 陈长青, 刘涛, 王敏. 航天器交会对接制导导航控制原理和方法. 北京: 国防工业出版社, 2018.Xie Yong-Chun, Chen Chang-Qing, Liu Tao, Wang Min. Theory and Methods of Guidance, Navigation and Control for Spacecraft Rendezvous and Docking. Beijing: National Defense Industry Press, 2018. [120] Xie Y C, Huang H, Hu Y, Zhang G. Applications of advanced control methods in spacecrafts: Progress, challenges, and future prospects. Frontiers of Information Technology and Electric Engineering, 2016, 17(9): 841-861 doi: 10.1631/FITEE.1601063 [121] Li Q, Yuan J, Wang H. Sliding mode control for autonomous spacecraft rendezvous with collision avoidance. Acta Astronautica, 2018, 151: 743-751 doi: 10.1016/j.actaastro.2018.07.006 [122] Li Q, Yuan J, Zhang B, Wang H. Artificial potential field based robust adaptive control for spacecraft rendezvous and docking under motion constraint. ISA transactions, 2019, 95: 173-184 doi: 10.1016/j.isatra.2019.05.018 [123] Zhang J, Ye D, Biggs J D, Sun J. Finite-time relative orbit-attitude tracking control for multi-spacecraft with collision avoidance and changing network topologies. Advances in Space Research, 2019, 63(3): 1161-1175 doi: 10.1016/j.asr.2018.10.037 [124] Li X, Zhu Z, Song S. Non-cooperative autonomous rendezvous and docking using artificial potentials and sliding mode control. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(4): 1171-1184 doi: 10.1177/0954410017748988 [125] Dong H, Hu Q, Akella M R. Dual-quaternion-based spacecraft autonomous rendezvous and docking under six-degree-of-freedom motion constraints. Journal of Guidance, Control, and Dynamics, 2018, 41(5): 1150-1162 doi: 10.2514/1.G003094 [126] Hu Q, Liu Y, Zhang Y. Control of non-cooperative spacecraft in final phase proximity operations under input constraints. Control Engineering Practice, 2019, 87: 83-96 doi: 10.1016/j.conengprac.2019.04.001 [127] Zhao X, Zhang S. Adaptive saturated control for spacecraft rendezvous and docking under motion constraints. Aerospace Science and Technology, 2021, 114: 106739 doi: 10.1016/j.ast.2021.106739 [128] 刘将辉, 李海阳. 对失控翻滚目标逼近的神经网络自适应滑模控制. 宇航学报, 2019, 40(6): 684-693Liu Jiang-Hui, Li Hai-Yang. Adaptive sliding mode control based on neural network for approaching to an uncontrolled tumbling satellite. Journal of Astronautics, 2019, 40(6): 684-693 [129] Liu C, Yue X K, Zhang J Q, Shi K K. Active disturbance rejection control for delayed electromagnetic docking of spacecraft in elliptical orbits. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(3): 2257-2268 doi: 10.1109/TAES.2021.3130830 [130] 韩飞, 段广仁, 王兆龙, 贺亮, 武海雷, 宋婷. 逼近与跟踪空间翻滚目标的图像视觉伺服控制. 控制理论与应用, 2018, 35(10): 1473-1483Han Fei, Duan Guang-Ren, Wang Zhao-Long, He Liang, Wu Hai-Lei, Song Ting. Image based visual servo control for approaching and tracking tumbling target in space. Control Theory & Appliations, 2018, 35(10): 1473-1483 [131] Zhao X, Emami M R, Zhang S. Image-based control for rendezvous and synchronization with a tumbling space debris. Acta Astronautica, 2021, 179: 56-68 doi: 10.1016/j.actaastro.2020.10.019 [132] 冯丽程. 空间目标安全接近控制算法研究 [硕士论文], 国防科学技术大学, 中国, 2016Feng Li-Cheng. Control Algorithm Research on Space Target Safe Proximity [Master thesis], National University of Defense Technology, China, 2016 [133] 倪庆. 航天器近距离相对运动安全控制技术 [博士论文], 国防科学技术大学, 中国, 2016Ni Qing. Safety Guidance and Control for Spacecraft Close Proximity Maneuvers [Ph.D. dissertation], National University of Defense Technology, China, 2016 [134] Wang Y, Bai Y Z, Xing J J, Radice G, Ni Q, Chen X Q. Equal-collision-probability-curve method for safe spacecraft close-range proximity maneuvers. Advances in Space Research, 2018, 62(9): 2599-2619 doi: 10.1016/j.asr.2018.07.007 [135] Vittaldev V, Russell R P. Space object collision probability using multidirectional Gaussian Mixture models. Journal of Guidance, Control, and Dynamics, 2016, 39(9): 2163-2169 doi: 10.2514/1.G001610 [136] Golestani M, Esmaeilzadeh S M, Mobayen S. Fixed-time control for high-precision attitude stabilization of flexible spacecraft. European Journal of Control, 2021, 57: 222-231 doi: 10.1016/j.ejcon.2020.05.006 [137] Ton C, Petersen C. Continuous fixed-time sliding mode control for spacecraft with flexible appendages. IFAC-PapersOnLine, 2018, 51(12): 1-5 doi: 10.1016/j.ifacol.2018.07.079 [138] Chen R, Bai Y, Wang Y, Chen Z, Zhao Y, Sheng T. Gaussian mixture model based fixed-time control for safe proximity to spacecraft with complex shape obstacle. Advances in Space Research, 2021, 68(10): 4217-4228 doi: 10.1016/j.asr.2021.07.027 [139] 刘洋, 井元伟, 刘晓平, 李小华. 非线性系统有限时间控制研究综述. 控制理论与应用, 2020, 37(1): 1-12Liu Yang, Jing Yuan-Wei, Liu Xiao-Ping, Li Xiao-Hua. Survey on finite-time control for nonlinear systems. Control Theory & Applications, 2020, 37(1): 1-12 [140] Huang Y, Jia Y. Adaptive fixed-time six-DOF tracking control for noncooperative spacecraft fly-around mission. IEEE Transactions on Control Systems Technology, 2018, 27(4): 1796-1804 [141] Hu Q, Chen W, Guo L. Fixed-time maneuver control of spacecraft autonomous rendezvous with a free-tumbling target. IEEE Transactions on Aerospace and Electronic Systems, 2018, 55(2): 562-577 [142] Heemels W P M H, Johansson K H, Tabuada P. An introduction to event-triggered and self-triggered control. In: Proceedings of the 51st IEEE Conference on Decision and Control. Maui, USA: 2012. 3270−3285 [143] Liu T, Jiang Z. A small-gain approach to robust event-triggered control of nonlinear systems. IEEE Transactions on Automatic Control, 2015, 60(8): 2072-2085 doi: 10.1109/TAC.2015.2396645 [144] Liu T, Jiang Z. Event-based control of nonlinear systems with partial state and output feedback. Automatica, 2015, 53: 10-22 doi: 10.1016/j.automatica.2014.12.027 [145] Tabuada P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Transactions on Automatic Control, 2007, 52(9): 1680-1685 doi: 10.1109/TAC.2007.904277 [146] Ge X, Han Q L, Zhang X M, Ding D. Dynamic event-triggered control and estimation: A survey. International Journal of Automation and Computing, 2021, 18(6): 857-886 doi: 10.1007/s11633-021-1306-z [147] Fisac J F, Akametalu A K, Zeilinger M N, Kaynama S, Gillula J, Tomlin C J. A general safety framework for learning-based control in uncertain robotic systems. IEEE Transactions on Automatic Control, 2018, 64(7): 2737-2752 [148] Pane Y P, Nageshrao S P, Babuška R. Actor-critic reinforcement learning for tracking control in robotics. In: Proceedings of the 55th IEEE Conference on Decision and Control. Las Vegas, USA: 2016. 5819−5826 [149] Ostafew C J, Schoellig A P, Barfoot T D, Collier J. Learning-based nonlinear model predictive control to improve vision-based mobile robot path tracking. Journal of Field Robotics, 2016, 33(1): 133-152 doi: 10.1002/rob.21587 [150] Cui R, Yang C, Li Y, Sharma S. Adaptive neural network control of AUVs with control input nonlinearities using reinforcement learning. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(6): 1019-1029 doi: 10.1109/TSMC.2016.2645699 [151] Medeiros A A D. A survey of control architectures for autonomous mobile robots. Journal of the Brazilian Computer Society, 1998, 4: 35-43 [152] Saridis G N. Toward the realization of intelligent controls. Proceedings of the IEEE, 1979, 67(8): 1115-1133 doi: 10.1109/PROC.1979.11407 [153] Brooks R A. A robust layered control system for a mobile robot. IEEE Journal on Robotics and Automation, 1986, 2(1): 14-23 doi: 10.1109/JRA.1986.1087032 [154] Gat E. Three Layer Architectures in Artificial Intelligence and Mobile Robots. Cambridge: MIT Press, 1998. [155] Arkin R C. Homeostatic control for a mobile robot: Dynamic replanning in hazardous environments. Journal of Robotic Systems, 1992, 9(2): 197-214 doi: 10.1002/rob.4620090207 [156] Nayak P, Bernard D E, Dorais G, Gamble J E B, Rajan K, Rouquette N, et al. Validating the DS-1 remote agent experiment. In: Proceedings of the 5th International Symposium on Artificial Intelligence, Robotics and Automation in Space. Noo-rdwijk, Netherlands: 1999. 349−356 [157] Ungar S G, Pearlman J S, Mendenhall J A, Reuter D. Overview of the Earth Observing One (EO-1) mission. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(6): 1149-1159 doi: 10.1109/TGRS.2003.815999 [158] 叶志玲, 黄晓峰, 顾明. “嫦娥4号”自主运行任务的设计与实现. 深空探测学报, 2019, 6(4): 358-363Ye Zhi-Ling, Huang Xiao-Feng, Gu Ming. Design and realization for autonomous operation of Chang’E-4 mission. Journal of Deep Space Exploration, 2019, 6(4): 358-363 [159] 丁进良, 杨翠娥, 陈远东, 柴天佑. 复杂工业过程智能优化决策系统的现状与展望. 自动化学报, 2018, 44(11): 1931-1943Ding Jin-Liang, Yang Cui-E, Chen Yuan-Dong, Chai Tian-You. Research progress and prospects of intelligent optimization decision making in complex industrial process. Acta Automatica Sinica, 2018, 44(11): 1931-1943 [160] 邹小兵, 蔡自兴, 于金霞. 基于异构Agent的移动机器人体系结构设计. 中南大学学报(自然科学版), 2005, 36(5): 733-738Zou Xiao-Bing, Cai Zi-Xing, Ding Jin-Xia. Design of an architecture based on heterogeneous agent for mobile robot. Journal of Central South University (Science and Technology), 2005, 36(5): 733-738 [161] 何炎祥, 陈萃萌. Agent 和多 Agent 系统的设计与应用. 武汉: 武汉大学出版社, 2001.He Yan-Xiang, Chen Cui-Meng. Design and Application of Agent and Multi-Agent System. Wuhan: Wuhan University Pr-ess, 2001. [162] 张天雷, 任秉韬, 郑思仪, 王鑫, 马楠, 张新钰. 中国人工智能学会中国人工智能系列白皮书 — 智能驾驶 2017, 中国人工智能学会, 中国, 2017Zhang Tian-Lei, Ren Bing-Tao, Zheng Si-Yi, Wang Xin, Ma Nan, Zhang Xin-Yu. White Papers on Artificial Intelligence in China-Intelligent Driving 2017, Chinese Association for Artificial Intelligence, China, 2017 [163] 吕金虎, 陈君安, 陈士华. 混沌时间序列分析及其应用. 武汉: 武汉大学出版社, 2005.Lv Jin-Hu, Chen Jun-An, Chen Shi-Hua. Chaos, Time Series Analysis and Its Applications. Wuhan: Wuhan University Pr-ess, 2005. [164] Jiang F, Dong L, Dai Q. Designing a mixed multilayer wavelet neural network for solving ERI inversion problem with massive amounts of data: A hybrid STGWO-GD learning approach. IEEE Transactions on Cybernetics, 2022, 52(2): 925-936 doi: 10.1109/TCYB.2020.2990319 [165] Lu T W, Yao E J, Zhang Y S, Yang Y. Joint optimal scheduling for a mixed bus fleet under micro driving conditions. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(4): 2464-2475 doi: 10.1109/TITS.2021.3061202 [166] Cao Y, Zhou Z J, Hu C H, He W, Tang S W. On the interpretability of belief rule based expert systems. IEEE Transactions on Fuzzy Systems, 2021, 29(11): 3489-3503 doi: 10.1109/TFUZZ.2020.3024024 [167] Sinha B, Dhanalakshmi R. Building a fuzzy logic-based McCulloch-Pitts Neuron recommendation model to uplift accuracy. The Journal of Supercomputing, 2021, 77(3): 2251-2267 doi: 10.1007/s11227-020-03344-5 [168] 王宇奇, 林麒, 王晓光, 周凡桂, 刘骏. 基于RBF神经网络补偿的一种绳牵引并联机器人支撑系统的力/位混合控制. 控制与决策, 2020, 35(3): 536-546Wang Yu-Qi, Lin Qi, Wang Xiao-Guang, Zhou Fan-Gui, Liu Jun. Force/position hybrid control for a wire-driven parallel robot support system based on RBF neural network compensation. Control and Decision, 2020, 35(3): 536-546 [169] 万军, 赵不贿. 基于自控网系统的混杂控制. 控制理论与应用, 2019, 36(9): 1528-1535Wan Jun, Zhao Bu-Hui. Hybrid control using cyber net system. Control Theory & Applications, 2019, 36(9): 1528-1535 [170] Bemporad A. Efficient conversion of mixed logical dynamical systems into an equivalent piecewise affine form. IEEE Transactions on Automatic Control, 2004, 49(5): 832-838 doi: 10.1109/TAC.2004.828315 -

 下载:
下载:

计量
- 文章访问数: 3073
- HTML全文浏览量: 1936
- PDF下载量: 909
- 被引次数: 0
