

Prescribed Performance Control of Redundantly-actuated Cable Driving Parallel Robots Subjected to Output Constraint
-
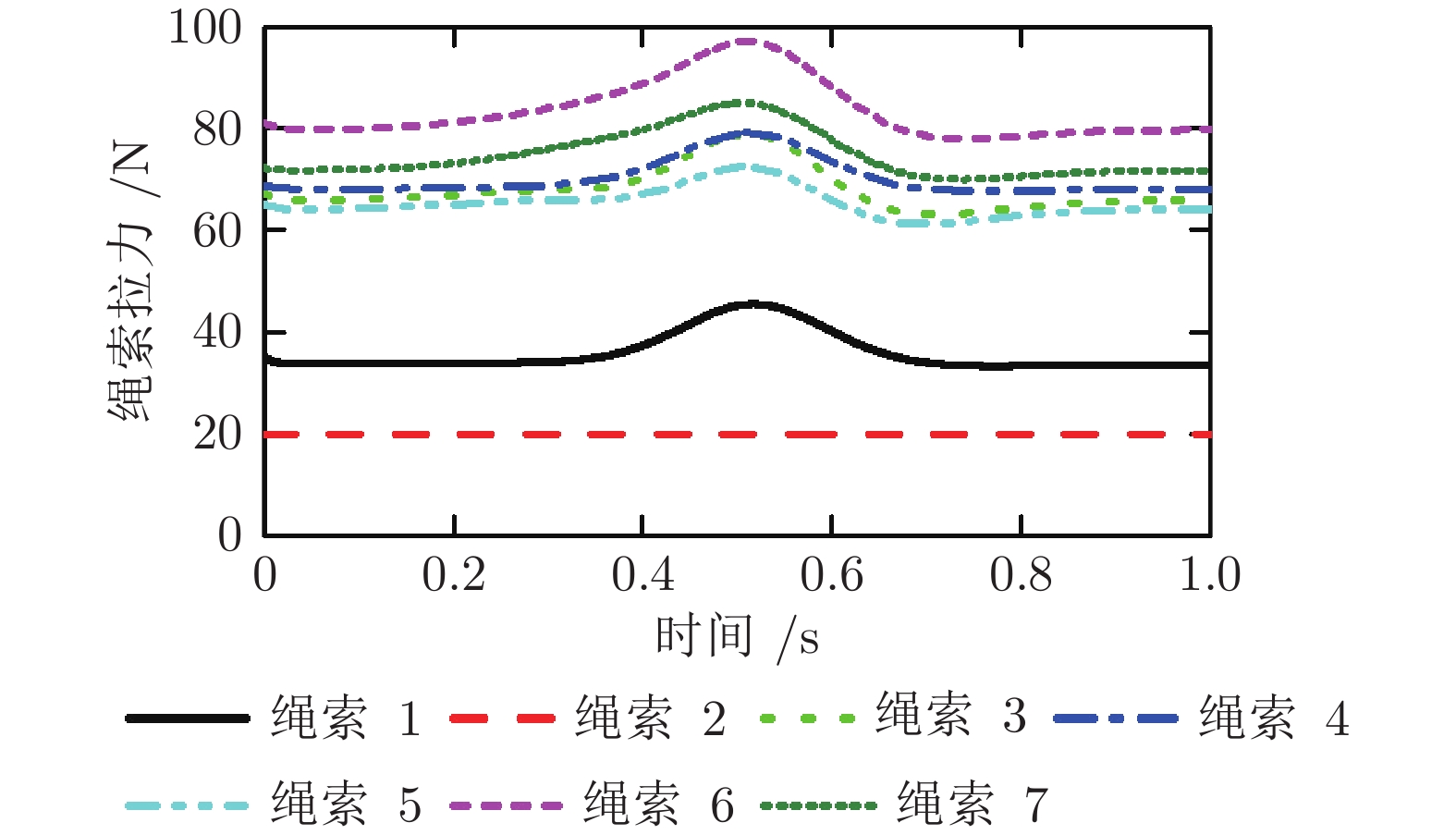
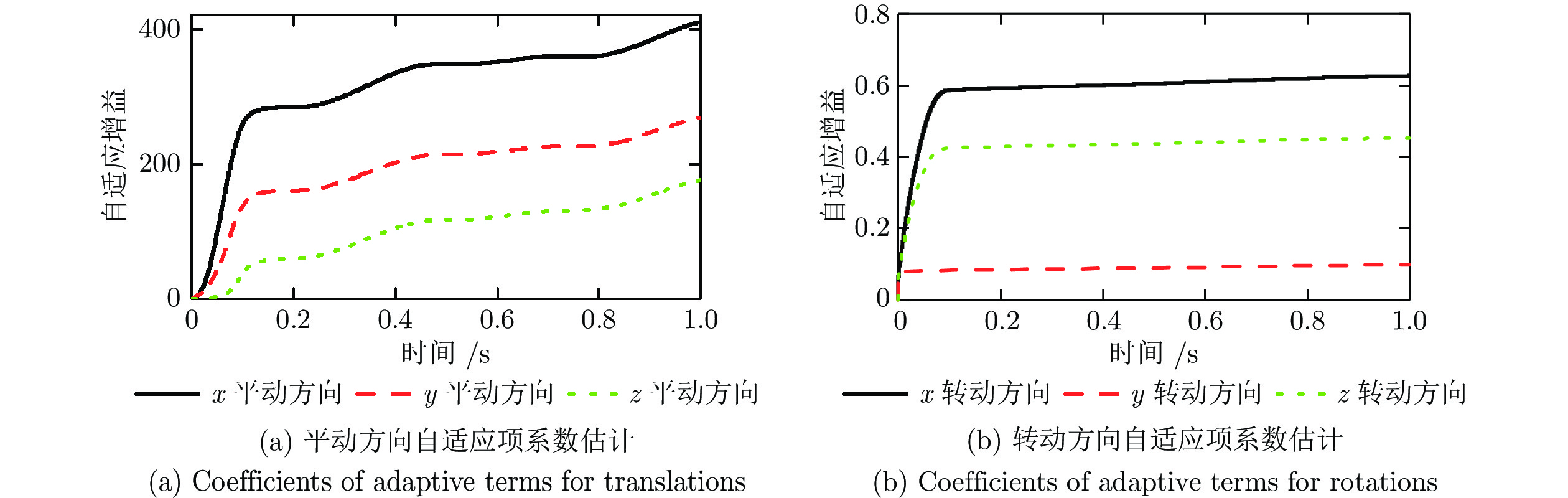
摘要: 提出一种考虑输出约束的冗余驱动绳索并联机器人(Redundantly-actuated cable driving parallel robots, RCDPRs)预设性能有限时间控制算法. 首先, 采用Newton-Euler方程推导系统动力学模型, 并建立绳索拉力优化模型保证系统正常工作; 其次, 将输出约束问题转化为位置跟踪误差的坐标变换问题, 设计给定时间衰减函数与非对称变换函数, 将约束形式的跟踪误差转化为无约束变量, 实现给定时间的输出约束; 然后, 针对滑模控制的抖振问题, 在预设性能控制中采用模型不确定与扰动估计器进行扰动估计, 并通过自适应方法对扰动估计误差进行补偿; 以此为基础, 提出一种基于精度驱动且在分段点处三阶连续的终端滑模面进行控制算法设计; 最后, 采用Lyapunov函数证明算法的有限时间收敛特性, 并以7自由度冗余驱动绳索并联机器人为控制对象进行仿真研究, 对算法进行验证.
-
关键词:
- 滑模控制 /
- 有限时间收敛 /
- 输出约束 /
- 给定时间预设性能控制 /
- 冗余驱动绳索并联机器人
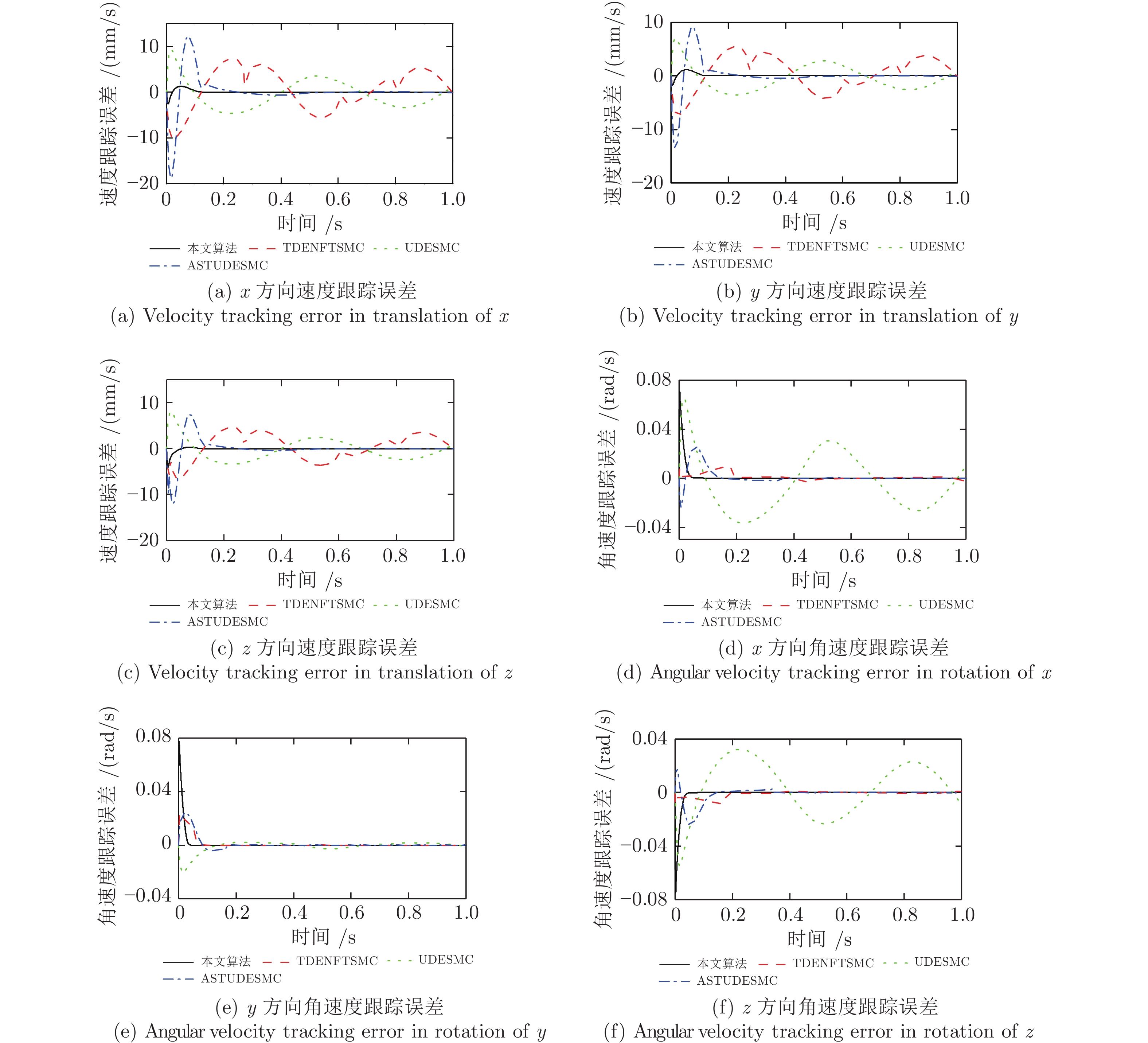
Abstract: This paper proposed a prescribed performance finite-time control algorithm of redundantly-actuated cable driving parallel robots (RCDPRs) considering output constraint. Firstly, the Newton-Euler equation is employed to establish the dynamic model of the system, and the optimization model for all cables was constructed to guarantee properly operation. Then, the output constraint problem is transformed into coordinate transformation problem of the position tracking errors, also the appointed time decay function and the asymmetric transformation function are designed to transform the tracking errors into unconstraint variables, thus the output constraint is realized. Meanwhile, aiming at the chattering problem, the uncertainty and disturbance estimator is proposed, and the adaptive algorithm is designed to compensate the estimation error, on the basis of which, the accuracy-driven terminal sliding mode surface with three-order continuity on the segment point is proposed and applied in controller design. Finally, the Lyapunov function is used to prove that the proposed algorithm has finite-time convergence characteristics, and a seven-degrees-of-freedom RCDPR is used as the control object for simulation research to demonstrate the effectiveness of the proposed controller. -
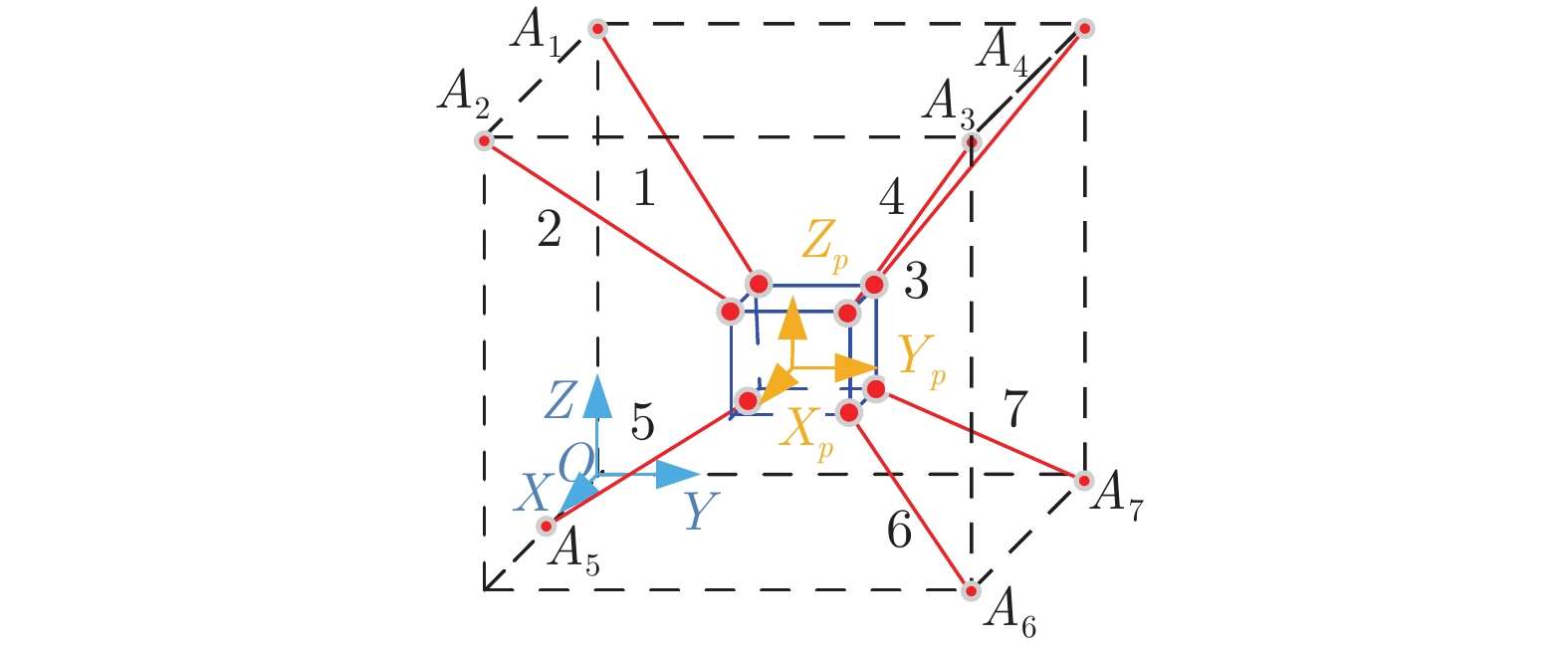
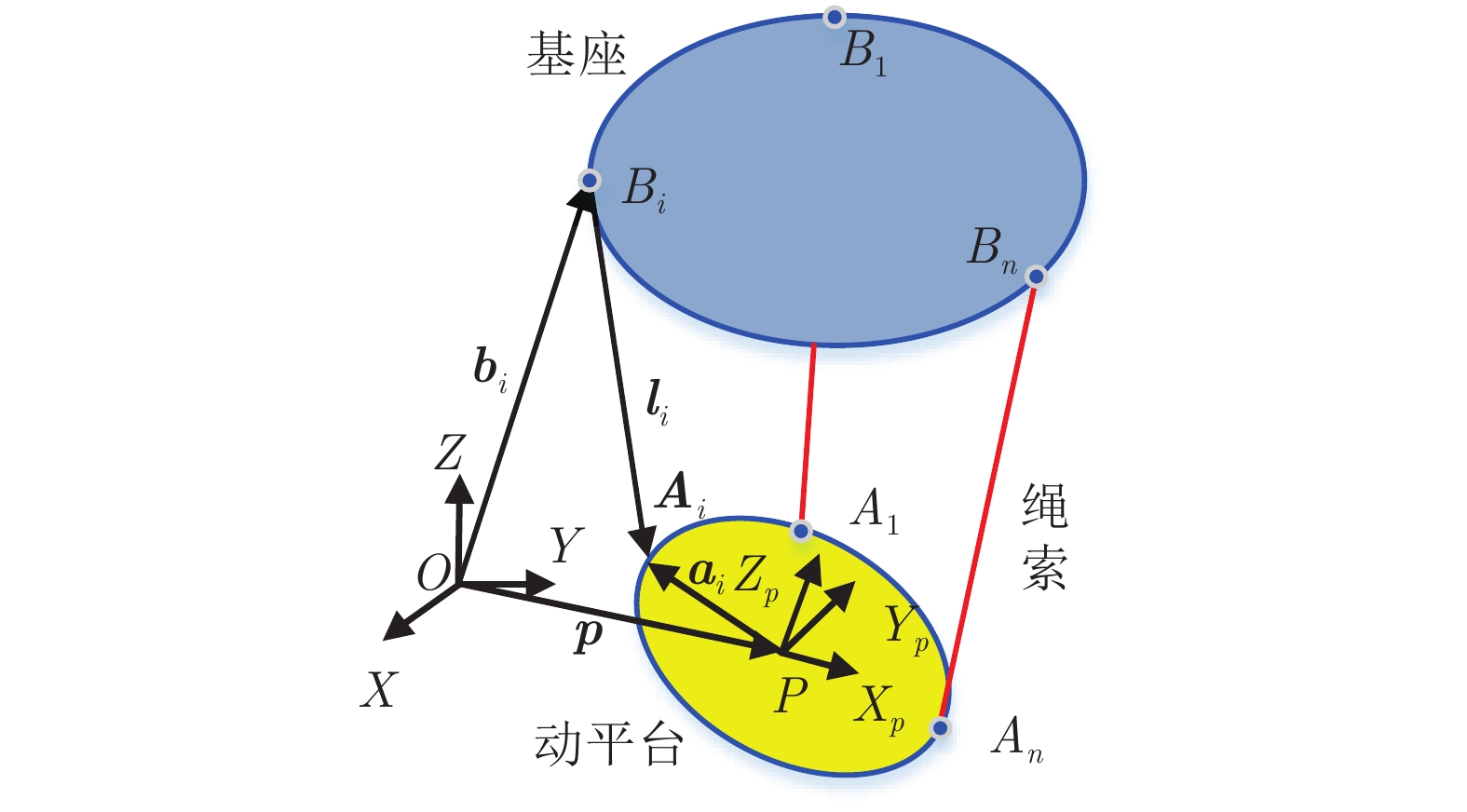
表 1 RCDPR运动学参数(mm)
Table 1 Kinematic parameters of the RCDPR (mm)
参数 数值 参数 数值 b1 [0, 0, 1000] a1 [−150, −100, 50] b2 [100, 0, 1000] a2 [150, −100, 50] b3 [1000, 1000, 1000] a3 [150, 100, 50] b4 [0, 1000, 1000] a4 [−150, 100, 50] b5 [500, 0, 0] a5 [0, −100, −50] b6 [1000, 1000, 0] a6 [150, 100, −50] b7 [0, 1000, 0] a7 [−150, 100, 50] r 20  下载: 导出CSV
下载: 导出CSV
表 2 RCDPR惯性参数
Table 2 Inertial parameters of the RCDPR
参数 描述 数值 mp 动平台质量 1.67 kg Ip 动平台转动惯量矩阵 diag{2.78×104, 5.56×104, 7.26×104} kg·mm2 Ib 滑轮转动惯量 1.2×104 kg·mm2
下载: 导出CSV
表 3 各控制器参数
Table 3 Parameters of all controllers
控制器 参数 值 PPSMC K1, K2, α1, α2, α3, Δ11, Δ12, Δ13, Δ14, Δ15, Δ16, β4, β5, K3, γ0, T, λ1, λ2, Te, ε1i, ε2i, μ0, μ∞, k 100I6, 50I6, 0.5, 1.5, 1.8, 0.01, 0.01, 0.01, 0.001, 0.001, 0.001, 5, 5, 10I6, 10, 0.001 s, 0.001, 0.01, 0.2 s, 0.5, 1, [0.2, 0.2, 0.2, 0.02, 0.02, 0.02]T, 0.002[1, 1, 1, 0.01, 0.01, 0.01]T, 30 ASTUDESMC k1, k2, αi, T, ε, $ {\omega _1}\sqrt {{{{\gamma _1}} \mathord{\left/ {\vphantom {{{\gamma _1}} 2}} \right. } 2}} $, λ+4ε2 100I6, 50I6, 0.5, 0.001 s, 0.5, 500, 10 TDENFTSMC ρ1, ρ2, α1i, α2i, k1, k2, L 100I6, 50I6, 0.5, 1.8, 0.001 s UDESMC c, 1/a, k 160, 0.001 s, 20
下载: 导出CSV
-
[1] Begey J, Cuvillon L, Lesellier M, Gouttefarde M, Gangloff J. Dynamic control of parallel robots driven by flexible cables and actuated by position-controlled winches. IEEE Transactions on Robotics, 2019, 35(1): 286-293 doi: 10.1109/TRO.2018.2875415 [2] 姜雷杰, 高丙团, 刘传德, 朱振宇. 2-DOF绳索驱动并联机构轨迹跟踪控制. 控制与决策, 2019, 34(5): 1103-1108Jiang Lei-Jie, Gao Bing-Tuan, Liu Chuan-De, Zhu Zhen-Yu. Trajectory tracking control of a 2-DOF cable-driven parallel mechanism. Control and Decision, 2019, 34(5): 1103-1108 [3] Asl HJ, Janabi-Sharifi F. Adaptive neural network control of cable-driven parallel robots with input saturation. Engineering Applications of Artificial Intelligence, 2017, 65: 252-260 doi: 10.1016/j.engappai.2017.05.011 [4] Chellal R, Cuvillon L, Laroche E. Model identification and vision-based H-infinity position control of 6-DoF cable-driven parallel robots. International Journal of Control, 2017, 90(4): 684-701 doi: 10.1080/00207179.2016.1220623 [5] 黄攀峰, 胡永新, 王东科, 孟中杰, 刘正雄. 空间绳系机器人目标抓捕鲁棒自适应控制器设计. 自动化学报, 2017, 43(4): 538-547Huang Pan-Feng, Hu Yong-Xin, Wang Dong-Ke, Meng Zhong-Jie, Liu Zheng-Xiong. Capturing the target for a tethered space robot using robust adaptive controller. Acta Automatica Sinica, 2017, 43(4): 538−547 [6] Wang Y, Liu L, Wang D, Ju F, Chen B. Time-delay control using a novel nonlinear adaptive law for accurate trajectory tracking of cable-driven robots. IEEE Transactions on Industrial Informatics, 2020, 16(8): 5234-5243 doi: 10.1109/TII.2019.2951741 [7] Chen Z, Wang X, Cheng Y. Adaptive finite-time disturbance observer-based recursive fractional-order sliding mode control of redundantly actuated cable driving parallel robots under disturbances and input saturation. Journal of Vibration and Control, DOI: 10.1177/10775463211051460 [8] Man Z, Paplinski AP, Wu HR. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Transactions on Automatic Control, 1994, 39(12): 2464-2469 doi: 10.1109/9.362847 [9] Zheng N J, Zhang Y, Guo Y B, Zhang X H. Hierarchical fast terminal sliding mode control for a self-balancing two-wheeled robot on uneven terrains. In: Proceedings of the 36th Chinese Control Conference (CCC). Dalian, China: IEEE, 2017. 4762−4767 [10] Feng Y, Yu XH, Man ZH. Non-singular terminal sliding mode control of rigid manipulators. Automatica, 2002, 38(12): 2159-2167 doi: 10.1016/S0005-1098(02)00147-4 [11] 张国庆, 黄晨峰, 吴晓雪, 张显库. 考虑伺服系统增益不确定的船舶动力定位自适应有限时间控制. 自动化学报, 2018, 44(10): 1907-1912Zhang Guo-Qing, Huang Chen-Feng, Wu Xiao-Xue, Zhang Xian-Ku. Adaptive finite time dynamic positioning control of fully-actuated ship with servo system uncertainties. Acta Automatica Sinica, 2018, 44(10): 1907−1912 [12] Van M, Ge SS, Ren HL. Finite time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control. IEEE Transactions on Cybernetics, 2017, 47(7): 1681-1693 doi: 10.1109/TCYB.2016.2555307 [13] Zhai JY, Song ZB. Adaptive sliding mode trajectory tracking control for wheeled mobile robots. International Journal of Control, 2019, 92(10): 2255-2262 doi: 10.1080/00207179.2018.1436194 [14] Wang Y, Zhu K, Chen B, Jin M. Model-free continuous nonsingular fast terminal sliding mode control for cable-driven manipulators. ISA transactions, 2020, 98: 483-495 doi: 10.1016/j.isatra.2019.08.046 [15] 李德昀, 徐德刚, 桂卫华. 基于时间延时估计和自适应模糊滑模控制器的双机械臂协同阻抗控制. 控制与决策, 2021, 36(6): 1311-1323Li D-Y, Xu D-G, Gui W-H. Coordinated impedance control for dual-arm robots based on time delay estimation and adaptive fuzzy sliding mode controller. Control and Decision, 2021, 36(6): 1311-1323 [16] 李中奇, 金柏, 杨辉, 谭畅, 付雅婷. 高速动车组强耦合模型的分布式滑模控制策略. 自动化学报, 2020, 46(3): 495−508Li Zhong-Qi, Jin Bai, Yang Hui, Tan Chang, Fu Ya-Ting. Distributed sliding mode control strategy for high-speed EMU strong coupling model. Acta Automatica Sinica, 2020, 46(3): 495-508 [17] Patre BM, Londhe PS, Waghmare LM, Mohan S. Disturbance estimator based non-singular fast fuzzy terminal sliding mode control of an autonomous underwater vehicle. Ocean Engineering, 2018, 159: 372-387 doi: 10.1016/j.oceaneng.2018.03.082 [18] 李繁飙, 黄培铭, 阳春华, 廖力清, 桂卫华. 基于非线性干扰观测器的飞机全电刹车系统滑模控制设计. 自动化学报, 2021, 47(11): 2557-2569Li Fan-Biao, Huang Pei-Ming, Yang Chun-Hua, Liao Li-Qing, Gui Wei-Hua. Sliding mode control design of aircraft electric brake system based on nonlinear disturbance observer. Acta Automatica Sinica, 2021, 47(11): 2557−2569 [19] Wang P, Zhang D, Lu B. ESO based sliding mode control for the welding robot with backstepping. International Journal of Control, 2020, 94(12): 3322-3331 [20] Wang Y, Yan F, Chen J, Ju F, Chen B. A new adaptive time-delay control scheme for cable-driven manipulators. IEEE Transactions on Industrial Informatics, 2019, 15(6): 3469-3481 doi: 10.1109/TII.2018.2876605 [21] 刘凡, 杨洪勇, 杨怡泽, 李玉玲, 刘远山. 带有不匹配干扰的多智能体系统有限时间积分滑模控制. 自动化学报, 2019, 45(4): 749-758Liu Fan, Yang Hong-Yong, Yang Yi-Ze, Li Yu-Ling, Liu Yuan-Shan. Finite-time integral sliding-mode control for multi-agent systems with mismatched disturbances. Acta Automatica Sinica, 2019, 45(4): 749−758 [22] Kolhe JP, Shaheed M, Chandar TS, Talole SE. Robust control of robot manipulators based on uncertainty and disturbance estimation. International Journal of Robust and Nonlinear Control, 2013, 23(1): 104-122 doi: 10.1002/rnc.1823 [23] Lu Q, Ren BB, Parameswaran S. Uncertainty and disturbance estimator-based global trajectory tracking control for a quadrotor. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1519-1530 doi: 10.1109/TMECH.2020.2978529 [24] Dong YT, Ren BB. UDE-based variable impedance control of uncertain robot systems. IEEE Transactions on Systems Man Cybernetics-Systems, 2019, 49(12): 2487-2498 doi: 10.1109/TSMC.2017.2767566 [25] Nam Y J. Comparison study of time delay control (TDC) and uncertainty and disturbance estimation (UDE) based control. In: Proceedings of the 16th International Conference on Control, Automation and Systems (ICCAS). Gyeongju, South Korea: IEEE, 2016. 749−756 [26] Zhou Z, Zhu F, Xu D, Guo S, Liu T, Li X. Robust free‐time‐stable fault tolerant control for rigid satellite attitude system with output constraint. International Journal of Robust and Nonlinear Control, 2021, 31(16): 7587–7760 doi: 10.1002/rnc.5703 [27] 李新凯, 张宏立, 范文慧. 基于时变障碍李雅普诺夫函数的变体无人机有限时间控制. 自动化学报, 2022, 48(6): 1530−1542Li Xin-Kai, Zhang Hong-Li, Fan Wen-Hui. Finite-time control for morphing aerospace vehicle based on time-varying barrier Lyapunov function. Acta Automatica Sinica, 2022, 48(6): 1530−1542 [28] Wu Y Y, Zhang Y, Wu A G. Preassigned finite-time attitude control for spacecraft based on time-varying barrier Lyapunov functions. Aerospace Science and Technology, 2021, 108: Article No. 106331 [29] Wu X, Zheng W, Zhou X, Shao S. Adaptive dynamic surface and sliding mode tracking control for uncertain QUAV with time-varying load and appointed-time prescribed performance. Journal of the Franklin Institute, 2021, 358(8): 4178-4208 doi: 10.1016/j.jfranklin.2021.03.018 [30] Shabana A A. Dynamics of Multibody Systems. Cambridge: Cambridge University Press, 2020. [31] Merlet J P. Parallel Robots. Dordrecht: Springer Science & Business Media, 2005. [32] Wu Y, Li G, Zuo Z, Liu X, Xu P. Practical Fixed-time Position Tracking Control of Permanent Magnet DC Torque Motor Systems. IEEE/ASME Transactions on Mechatronics, 2021, 26(1): 563-573 [33] Yu J, Shi P, Zhao L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica, 2018, 92: 173-180 doi: 10.1016/j.automatica.2018.03.033 [34] Kuperman A, Zhong Q-C. Robust control of uncertain nonlinear systems with state delays based on an uncertainty and disturbance estimator. International Journal of Robust and Nonlinear Control, 2011, 21(1): 79-92 doi: 10.1002/rnc.1578 [35] Tian Z, Zhong Q-C, Ren B, Yuan J. Stabilisability analysis and design of UDE-based robust control. IET Control Theory and Applications, 2019, 13(10): 1445-1453 doi: 10.1049/iet-cta.2018.6012 [36] Zheng Z, Feroskhan M. Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2564-2575 doi: 10.1109/TMECH.2017.2756110 [37] Shtessel Y B, Moreno J A, Plestan F, Fridman L M, Poznyak A S. Super-twisting adaptive sliding mode control: A Lyapunov design. In: Proceedings of the 2010 IEEE Conference on Decision and Control (CDC). Atlanta, GA, USA: IEEE, 2010. 5109−5113 [38] Tian Z, Lyu Z, Yuan J, Wang C. UDE-based sliding mode control of DC–DC power converters with uncertainties. Control Engineering Practice, 2019, 83: 116-128 doi: 10.1016/j.conengprac.2018.10.019 -

 下载:
下载:



图(10) / 表(3)
计量
- 文章访问数: 1217
- HTML全文浏览量: 225
- PDF下载量: 332
- 被引次数: 0
