

Non-cascade Dual-rate Composite Decentralized Operational Optimal Control for Complex Industrial Processes
-
摘要: 复杂工业过程具有模型维数高、多时间尺度耦合、动态不确定性等特点, 其运行优化控制(Operational optimal control, OOC)一直是控制领域的研究难点与热点. 本文聚焦一类由多个快变且互联的设备单元与慢变且模型未知的运行过程串联组成的工业过程, 提出一种数据和模型混合驱动的非串级双速率组合分散运行优化控制方法. 该方法通过奇异摄动理论, 将非串级双速率运行优化问题描述为异步采样的慢子系统最优设定值跟踪和快子系统最优调节控制. 利用工业运行数据, 采用不依赖系统动态的Q-学习算法设计慢子系统最优跟踪策略, 克服运行过程模型难以建立的情形; 针对快子系统, 设计基于模型的分散次优控制策略, 并给出收敛因子的下界, 解决设备层互联项对系统稳定性的影响. 通过浮选过程仿真实验验证了所提控制方法的有效性.Abstract: Due to the features of high model dimensionality, multiple time scales, and dynamic uncertainty, operational optimal control (OOC) for complex industrial processes has always been a difficult and hot topic in the control community. This paper proposes a data-based and model-based non-cascade dual-rate composite decentralized OOC scheme for a class of industrial processes, which consist of multiple fast-changing and interconnected unite devices and a slow-changing operational process with unknown dynamics. Based on singular perturbation theory, the non-cascade dual-rate OOC problem is formulated as two asynchronous sampling optimal problems related to set-point tracking of the slow subsystem and regulator of the fast subsystem. The Q-learning algorithm which is independent of the model knowledge of the operational process is adopted to design optimal tracking policy for the slow subsystem by using industrial data. For the fast subsystem, we present a model-based decentralized suboptimal control policy and provide a lower bound on the convergence factor, so that the impact of interconnected items on system stability is offset. Simulation experiments on a flotation process illustrate the effectiveness of the proposed method.
-
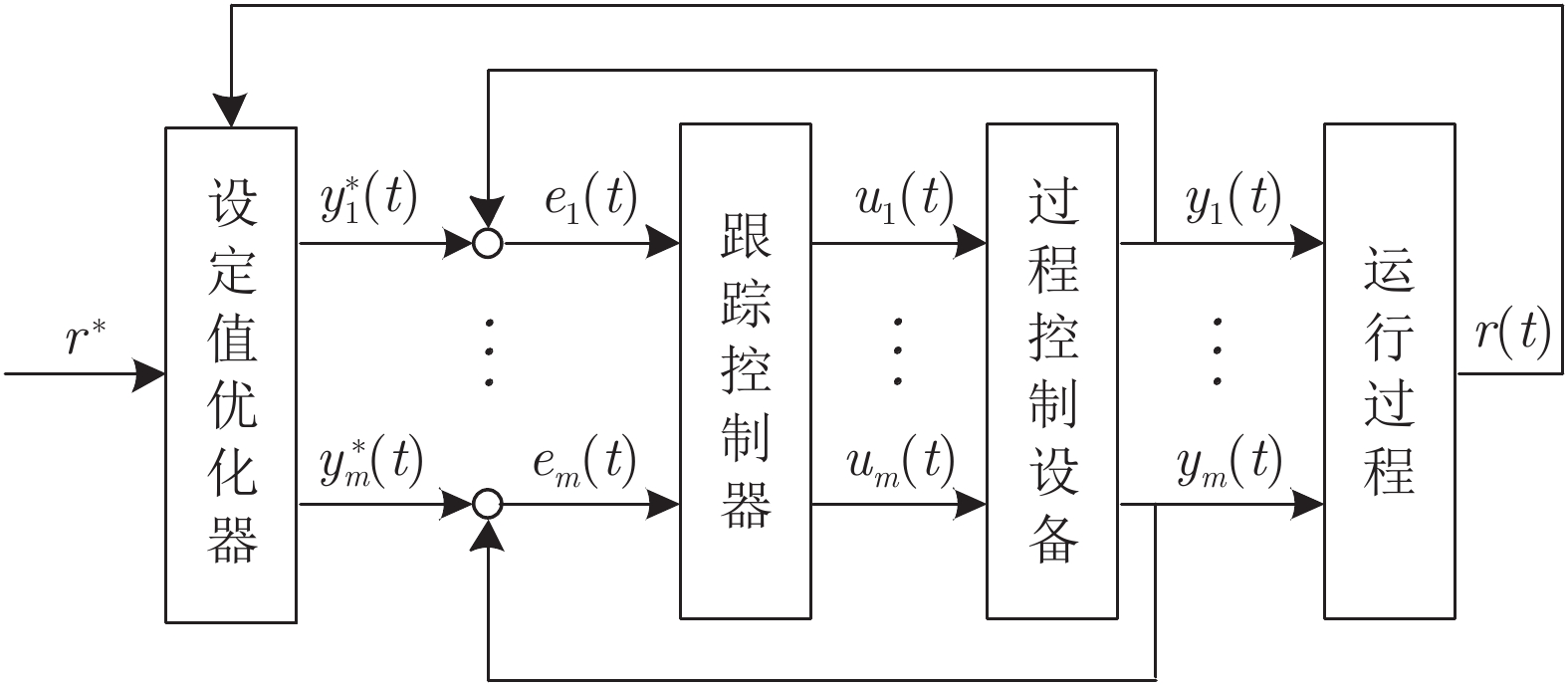
图 1 工业过程串级运行优化控制结构
Fig. 1 The cascade structure of operational optimal control in industrial process

图 2 工业过程非串级运行优化控制结构
Fig. 2 The non-cascade structure of operational optimal control in industrial process
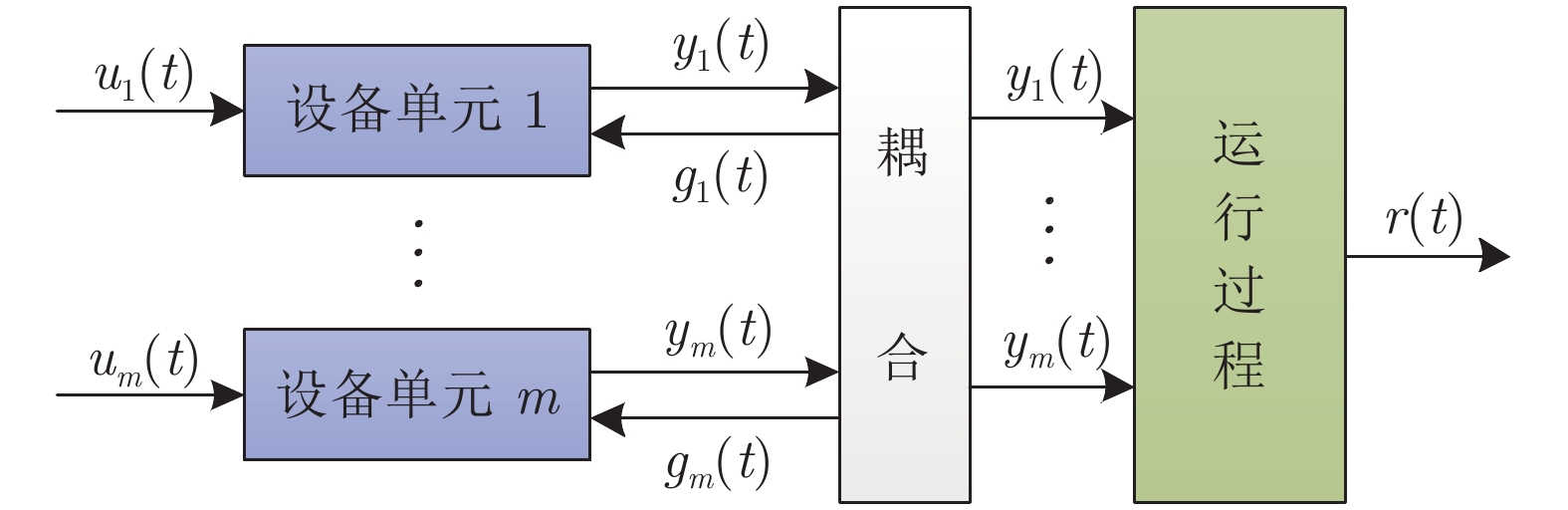
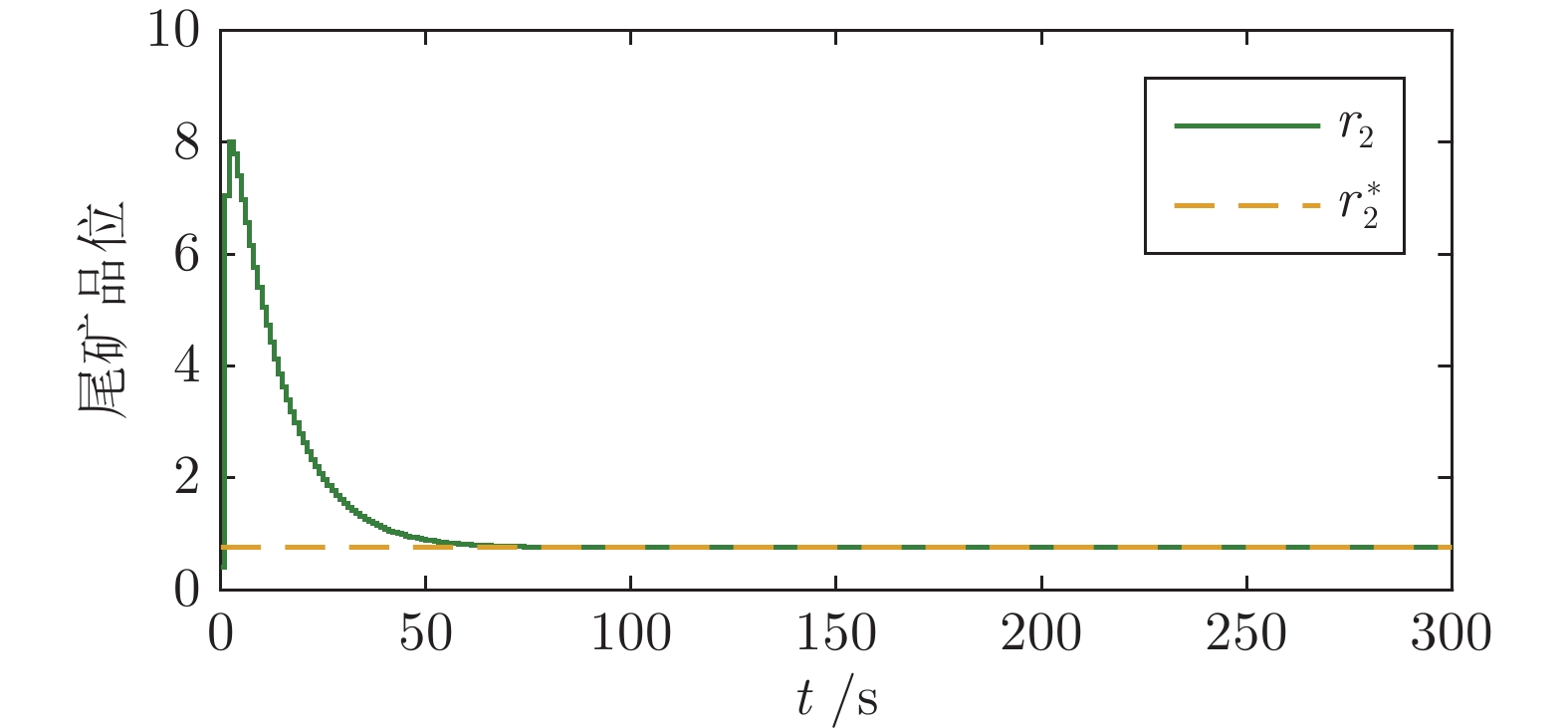
图 3 多设备单元互联的工业过程
Fig. 3 Industrial process with multiple and interconnected unit devices

图 6 控制增益
${\tilde K_s}$ 的收敛性Fig. 6 Convergence of
${\tilde K_s}$ to its ideal value${ K_s}$ 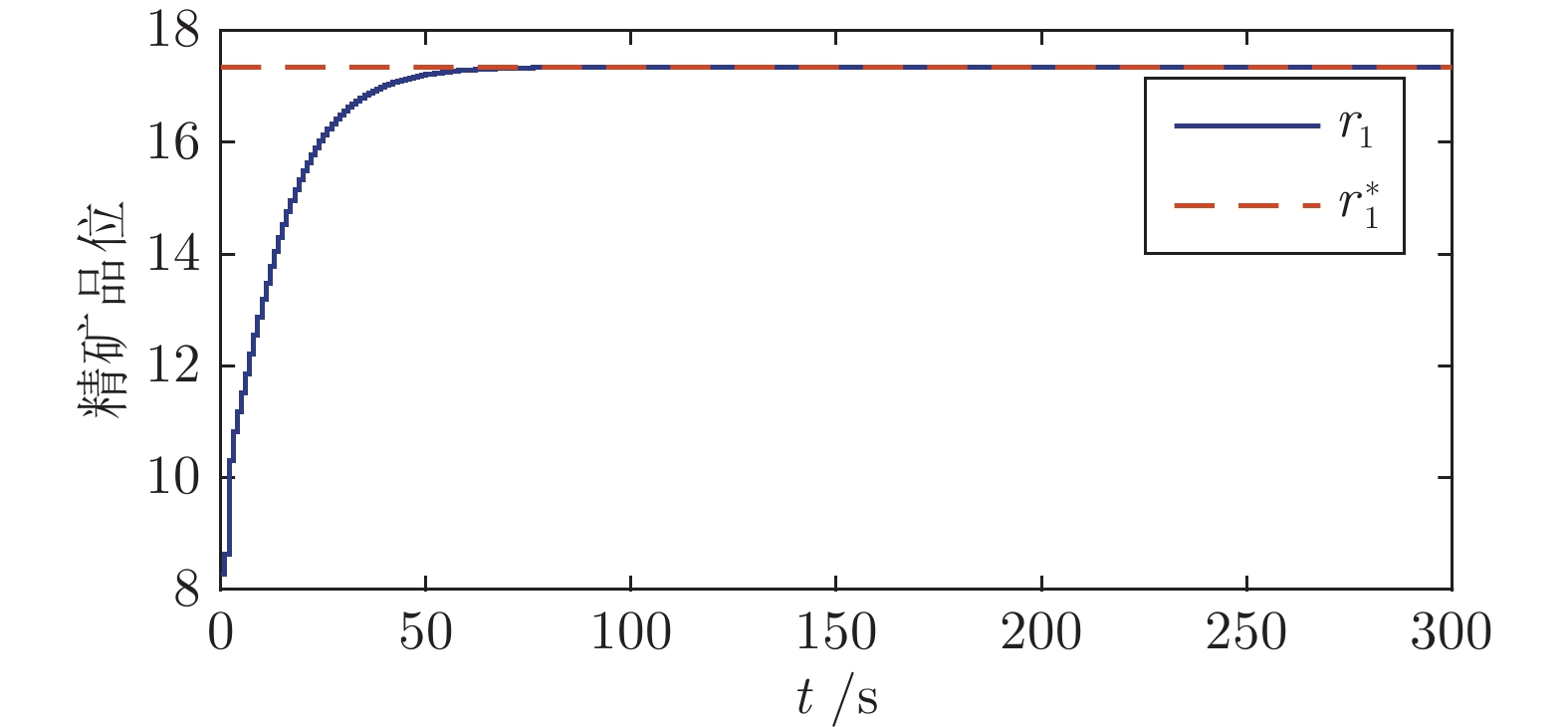
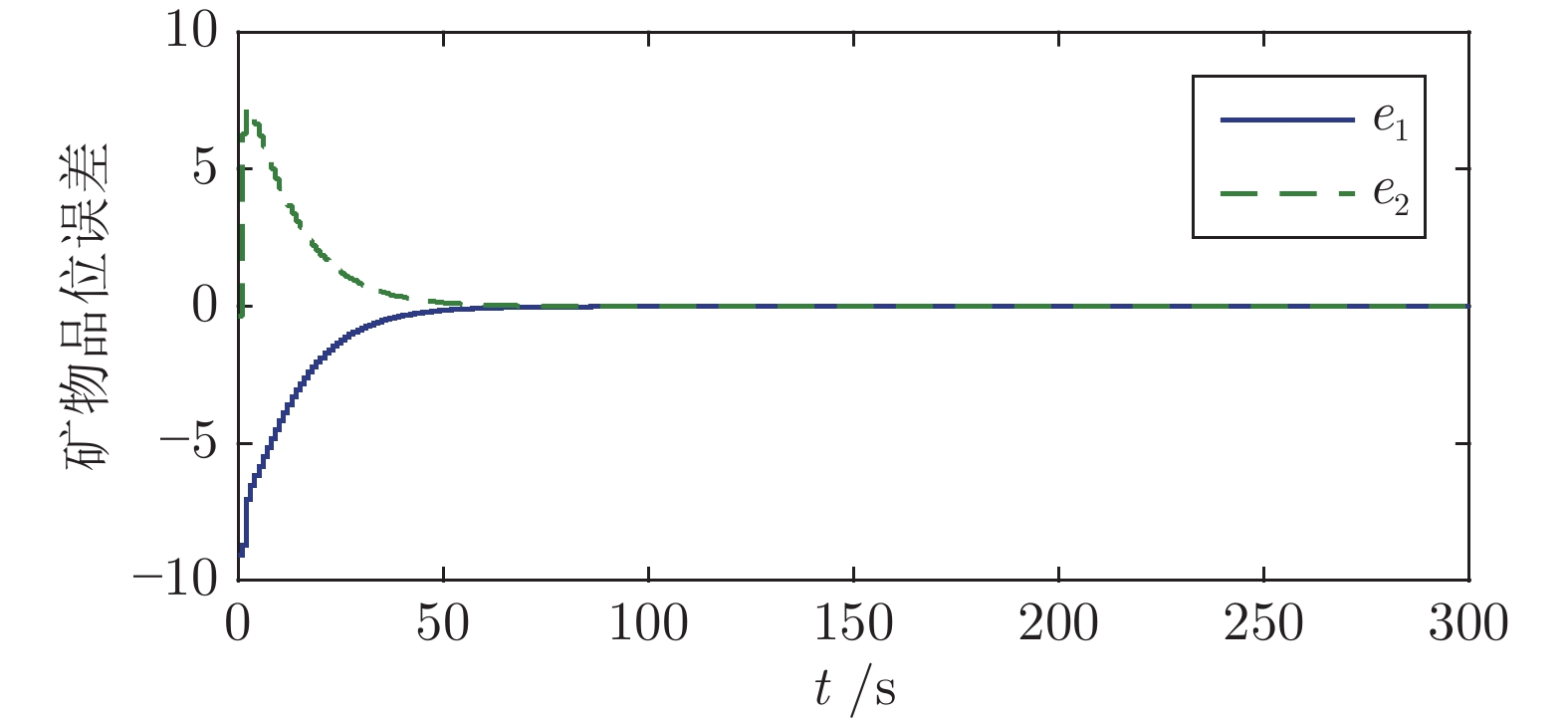
图 7 精矿品位跟踪曲线
Fig. 7 The tracking performance of the concentrate grade to its set-point
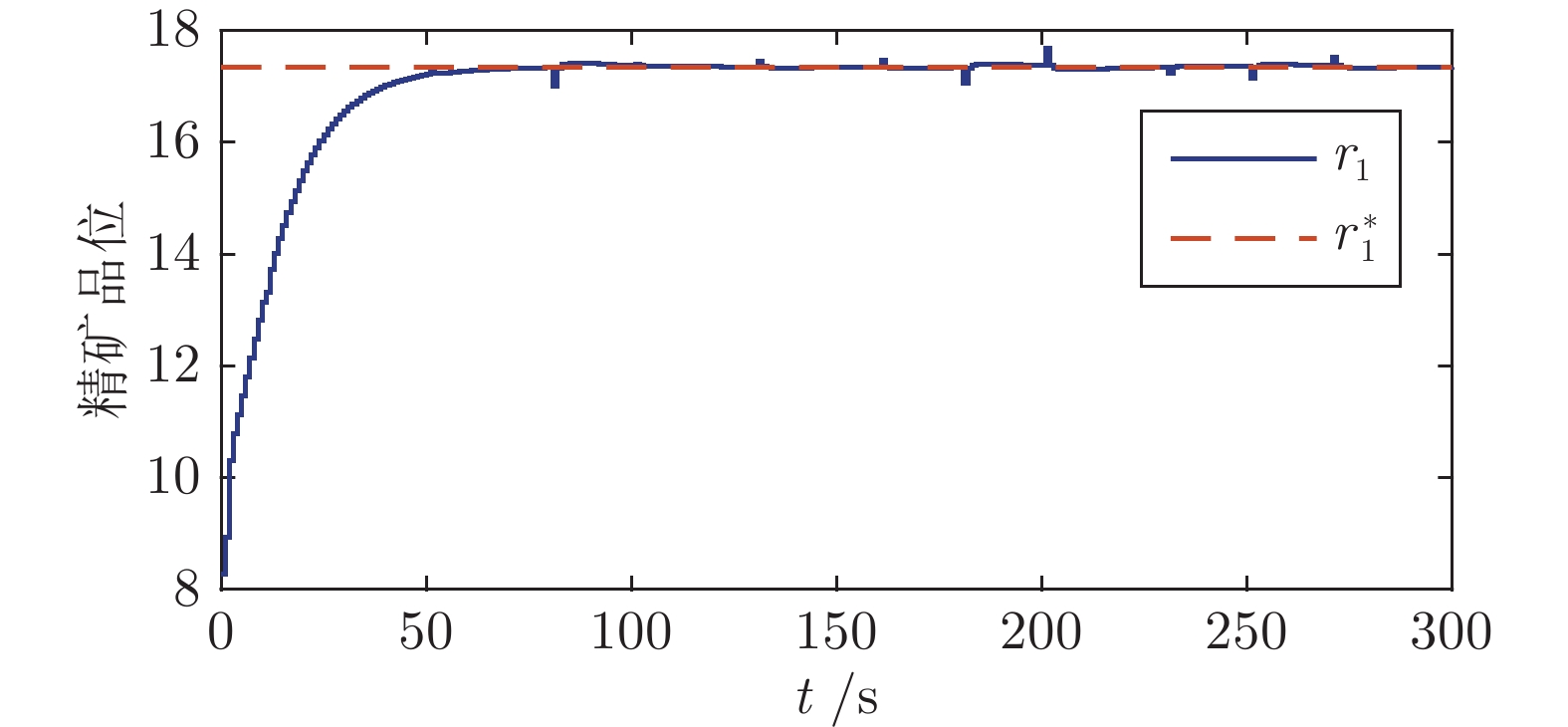
图 11 扰动下精矿品位跟踪曲线
Fig. 11 The tracking performance of the concentrate grade to its set-point under disturbance
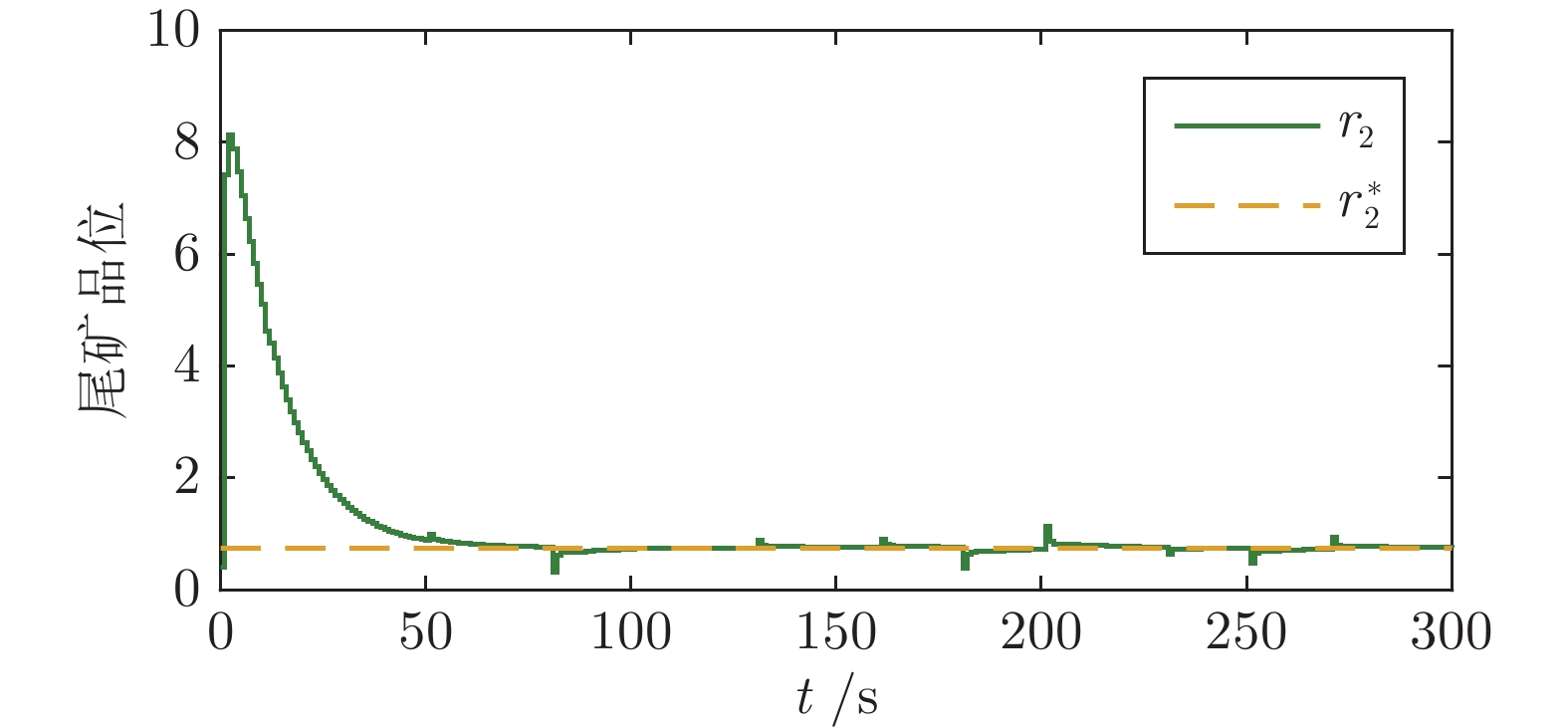
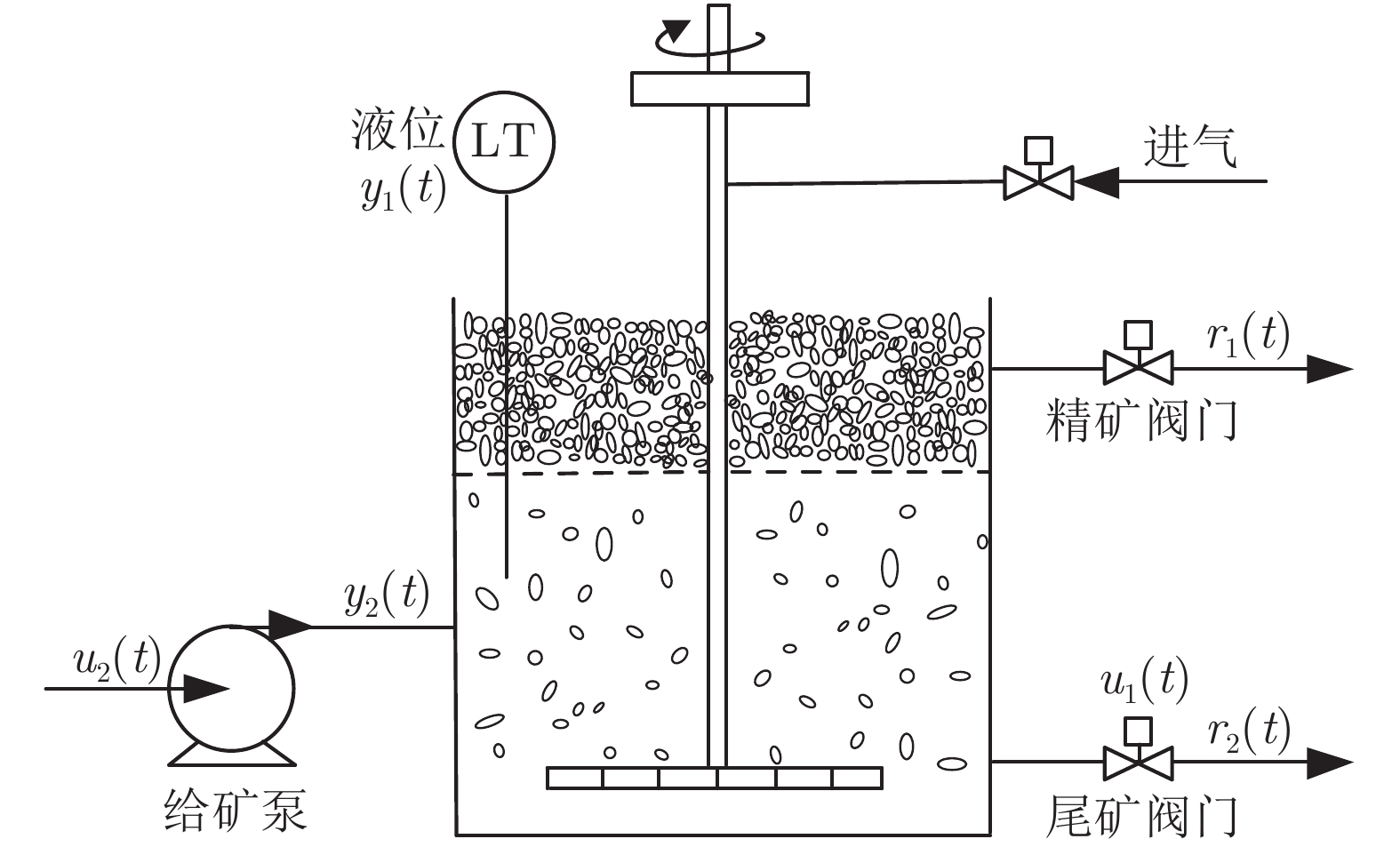
图 12 扰动下尾矿品位跟踪曲线
Fig. 12 The tracking performance of the tail grade to its set-point under disturbance


-
[1] 柴天佑. 工业过程控制系统研究现状与发展方向. 中国科学: 信息科学, 2016, 46: 1003-1015 doi: 10.1360/N112016-00062Chai Tian-You. Industrial process control systems: Research status and development direction. Scientia Sinica Informationis, 2016, 46: 1003-1015 doi: 10.1360/N112016-00062 [2] 柴天佑. 工业人工智能发展方向. 自动化学报, 2020, 46(10): 2005-2012Chai Tian-You. Development directions of industrial artificial intelligence. Acta Automatica Sinica, 2020, 46(10): 2005-2012 [3] Jiang Y, Fan J L, Chai T Y, Lewis F L. Dual-rate operational optimal control for flotation industrial process with unknown operational model. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4587-4599 doi: 10.1109/TIE.2018.2856198 [4] 代伟, 陆文捷, 付俊, 马小平. 工业过程多速率分层运行优化控制. 自动化学报, 2019, 45(10): 1946-1959Dai Wei, Lu Wen-Jie, Fu Jun, Ma Xiao-Ping. Multi-rate layered optimal operational control of industrial processes. Acta Automatica Sinica, 2019, 45(10): 1946-1959 [5] Xue W Q, Fan J L, Lopez V G, Li J N, Jiang Y, Chai T Y. New methods for optimal operational control of industrial processes using reinforcement learning on two time scales. IEEE Transactions on Industrial Informatics, 2020, 16(5): 3085-3099 doi: 10.1109/TII.2019.2912018 [6] 柴天佑, 刘强, 丁进良, 卢绍文, 宋延杰, 张艺洁. 工业互联网驱动的流程工业智能优化制造新模式研究展望. 中国科学: 技术科学, 2022, 52(1): 14-25 doi: 10.1360/SST-2021-0405Chai Tian-You, Liu Qiang, Ding Jin-Liang, Lu Shao-Wen, Song Yan-Jie, Zhang Yi-Jie. Perspectives on industrial-internet-driven intelligent optimized manufacturing mode for process industries. Scientia Sinica Technologica, 2022, 52(1): 14-25 doi: 10.1360/SST-2021-0405 [7] Yang Y R, Zou Y Y, Li S Y. Economic model predictive control of enhanced operation performance for industrial hierarchical systems. IEEE Transactions on Industrial Electronics, 2022, 69(6): 6080-6089 doi: 10.1109/TIE.2021.3088334 [8] 富月, 杜琼. 一类工业运行过程多模型自适应控制方法. 自动化学报, 2018, 44(7): 1250-1259Fu Yue, Du Qiong. Multi-model adaptive control method for a class of industrial operational processes. Acta Automatica Sinica, 2018, 44(7): 1250-1259 [9] Wang L Y, Jia Y, Chai T Y, Xie W F. Dual-rate adaptive control for mixed separation thickening process using compensation signal based approach. IEEE Transactions on Industrial Electronics, 2018, 65(4): 3621-3632 doi: 10.1109/TIE.2017.2752144 [10] Lu X L, Kiumarsi B, Chai T Y, Jiang Y, Lewis F L. Operational control of mineral grinding processes using adaptive dynamic programming and reference governor. IEEE Transactions on Industrial Informatics, 2019, 15(4): 2210-2221 doi: 10.1109/TII.2018.2868473 [11] Sutton R S, Barto A G. Reinforcement Learning: An Introduction. Cambridge: MIT Press, 2nd edition, 2018. [12] Bradtke S J, Ydstie B E, Barto A G. Adaptive linear quadratic control using policy iteration. In: Proceedings of the American Control Conference. Baltimore, USA: IEEE, 1994. 3475−3479 [13] Kiumarsi B, Lewis F L, Modares H, Karimpour A, Naghibi-Sistani M B. Reinforcement $Q$ -learning for optimal tracking control of linear discrete-time systems with unknown dynamics. Automatica, 2014, 50(4): 1167-1175 doi: 10.1016/j.automatica.2014.02.015[14] 吴倩, 范家璐, 姜艺, 柴天佑. 无线网络环境下数据驱动混合选别浓密过程双率控制方法. 自动化学报, 2019, 45(6): 1122-1135 doi: 10.16383/j.aas.c180202Wu Qian, Fan Jia-Lu, Jiang Yi, Chai Tian-You. Data-driven dual-rate control for mixed separation thickening process in a wireless network environment. Acta Automatica Sinica, 2019, 45(6): 1122-1135 doi: 10.16383/j.aas.c180202 [15] Dai W, Zhang L Z, Fu J, Chai T Y, Ma X P. Dual-rate adaptive optimal tracking control for dense medium separation process using neural networks. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(9): 4202-4216 doi: 10.1109/TNNLS.2020.3017184 [16] Li J N, Kiumarsi B, Chai T Y, Fan J L. Off-policy reinforcement learning: Optimal operational control for two-time-scale industrial processes. IEEE Transactions on Cybernetics, 2017, 47(12): 4547-4558 doi: 10.1109/TCYB.2017.2761841 [17] Li J N, Chai T Y, Lewis F L, Fan J L, Ding Z T, Ding J L. Off-policy $Q$ -learning: Set-point design for optimizing dual-rate rougher flotation operational processes. IEEE Transactions on Industrial Electronics, 2018, 65(5): 4092-4102 doi: 10.1109/TIE.2017.2760245[18] Zhao J G, Yang C Y, Dai W, Gao W N. Reinforcement learning-based composite optimal operational control of industrial systems with multiple unit devices. IEEE Transactions on Industrial Informatics, 2022, 18(2): 1091-1101 doi: 10.1109/TII.2021.3076471 [19] Kokotovic P V, Khalil H K, O'Reilly J. Singular Perturbation Methods in Control: Analysis and Design. Philadelphia: SIAM, 1999. [20] Zhao J G, Yang C Y, Gao W N. Reinforcement learning based optimal control of linear singularly perturbed systems. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2022, 69(3): 1362-1366 doi: 10.1109/TCSII.2021.3105652 [21] Litkouhi B, Khalil H K. Multirate and composite control of two-time-scale discrete-time systems. IEEE Transactions on Automatic Control, 1985, 30(7): 645-651 doi: 10.1109/TAC.1985.1104024 [22] Zhou L N, Zhao J G, Ma L, Yang C Y. Decentralized composite suboptimal control for a class of two-time-scale interconnected networks with unknown slow dynamics. Neurocomputing, 2020, 382: 71-79 doi: 10.1016/j.neucom.2019.11.057 [23] Li J N, Ding J L, Chai T Y, Lewis F L. Nonzero-sum game reinforcement learning for performance optimization in large-scale industrial processes. IEEE Transactions on Cybernetics, 2020, 50(9): 4132-4145 doi: 10.1109/TCYB.2019.2950262 [24] 袁兆麟, 何润姿, 姚超, 李佳, 班晓娟. 基于强化学习的浓密机底流浓度在线控制算法. 自动化学报, 2021, 47(7): 1558-1571 doi: 10.16383/j.aas.c190348Yuan Zhao-Lin, He Run-Zi, Yao Chao, Li Jia, Ban Xiao-Juan. Online reinforcement learning control algorithm for concentration of thickener underflow. Acta Automatica Sinica, 2021, 47(7): 1558-1571 doi: 10.16383/j.aas.c190348 [25] Granzotto M, Postoyan R, Busoniu L, Nešić D, Daafouz J. Finite-horizon discounted optimal control: $\rm{S}$ tability and performance. IEEE Transactions on Automatic Control, 2021, 66(2): 550-565 doi: 10.1109/TAC.2020.2985904[26] Zhao J G, Yang C Y, Gao W N, Zhou L N. Reinforcement learning and optimal setpoint tracking control of linear systems with external disturbances. IEEE Transactions on Industrial Informatics, 2022, 18(11): 7770−7779 [27] 李彦瑞, 杨春节, 张瀚文, 李俊方. 流程工业数字孪生关键技术探讨. 自动化学报, 2021, 47(3): 501-514 doi: 10.16383/j.aas.c200147Li Yan-Rui, Yang Chun-Jie, Zhang Han-Wen, Li Jun-Fang. Discussion on key technologies of digital twin in process industry. Acta Automatica Sinica, 2021, 47(3): 501-514 doi: 10.16383/j.aas.c200147 [28] 姜艺, 范家璐, 柴天佑. 数据驱动的保证收敛速率最优输出调节. 自动化学报, 2022, 48(4): 980-991 doi: 10.16383/j.aas.c200932Jiang Yi, Fan Jia-Lu, Chai Tian-You. Data-driven optimal output regulation with assured convergence rate. Acta Automatica Sinica, 2022, 48(4): 980-991 doi: 10.16383/j.aas.c200932 [29] Jiang Y, Gao W N, Na J, Zhang D, Hämäläinen T T, Stojanovic V, et al. Value iteration and adaptive optimal output regulation with assured convergence rate. Control Engineering Practice, 2022, 121: Article No. 105042 [30] Huang J. Nonlinear Output Regulation: Theory and Applications. Philadelphia: SIAM, 2004. [31] Lewis F L, Vrabie D, Syrmos V L. Optimal Control. New York: John Wiley and Sons, 3rd edition, 2012. [32] Mukherjee S, Bai H, Chakrabortty A. Reduced-dimensional reinforcement learning control using singular perturbation approximations. Automatica, 2021, 126: Article No. 109451 [33] Rizvi S A A, Lin Z L. Output feedback $Q$ -learning for discrete-time linear zero-sum games with application to the$H$ -infinity control. Automatica, 2018, 95: 213-221 doi: 10.1016/j.automatica.2018.05.027[34] Liu D R, Xue S, Zhao B, Luo B, Wei Q L. Adaptive dynamic programming for control: A survey and recent advances. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(1): 142-160 doi: 10.1109/TSMC.2020.3042876 [35] Jiang Y, Kiumarsi B, Fan J L, Chai T Y, Li J N, Lewis F L. Optimal output regulation of linear discrete-time systems with unknown dynamics using reinforcement learning. IEEE Transactions on Cybernetics, 2020, 50(7): 3147-3156 doi: 10.1109/TCYB.2018.2890046 [36] Liu X M, Yang C Y, Luo B, Dai W. Suboptimal control for nonlinear slow-fast coupled systems using reinforcement learning and Takagi-Sugeno fuzzy methods. International Journal of Adaptive Control and Signal Processing, 2021, 35(6): 1017-1038 doi: 10.1002/acs.3234 -

 下载:
下载:














计量
- 文章访问数: 1002
- HTML全文浏览量: 195
- PDF下载量: 269
- 被引次数: 0
