

A Knee Point Based Coevolution Multi-objective Particle Swarm Optimization Algorithm for Heterogeneous UAV Cooperative Multi-task Allocation
-
摘要: 随着无人机(Unmanned aerial vehicle, UAV)技术的广泛应用和执行任务的日益复杂, 无人机多机协同控制面临着新的挑战. 以无人机总飞行距离和任务完成时间为优化目标, 同时考虑异构无人机类型、任务执行时序等多种实际约束, 构建基于多种约束条件的异构无人机协同多任务分配模型. 该模型不仅包含混合变量, 同时还存在多个复杂的约束条件, 因此, 传统的多目标优化算法并不能有效地处理混合变量及对问题空间进行搜索并生成满足多种约束条件的可行解. 为高效求解上述模型, 提出一种基于拐点的协同多目标粒子群优化算法(Knee point based coevolution multi-objective particle swarm optimization, KnCMPSO), 该算法引入基于拐点的学习策略来更新外部档案集, 在保证收敛性的同时增加种群的多样性, 使算法能搜索到更多可行的任务分配结果; 并基于二进制交叉方法, 引入基于学习的粒子更新策略来提升算法的收敛性及基于区间扰动的局部搜索策略以提升算法的多样性. 最后通过在四组实例上的仿真实验验证了所提算法在求解异构无人机协同多任务分配问题上的有效性.Abstract: With the wide application of unmanned aerial vehicle (UAV) technology and the increasing complexity of UAV tasks, the multi-aircraft cooperative control on UAVs faces new challenges. In this paper, a heterogeneous UAV cooperative multi-task allocation model which takes the UAV total flight distance and task completion time as the optimization objectives is set up. The model includes mixed variables and multiple complex constraints, such as UAV type and task execution time. As a result, traditional multi-objective optimization algorithms cannot effectively search the problem space and generate feasible solutions. In this paper, a knee point based cooperative multi-objective particle swarm optimization algorithm, namely knee point based coevolution multi-objective particle swarm optimization (KnCMPSO), is proposed to solve the above model. In KnCMPSO, a knee point based learning strategy is employed to update the external archive set, which can help get more better solutions. The learning-based particle update strategy is proposed to improve the convergence and the interval disturbance based local search strategy is used to enhance the diversity. The experimental results on four sets of examples show that, the proposed KnCMPSO algorithm can solve the heterogeneous UAVs collaborative multi-task allocation problem more effectively than other existing methods.
-
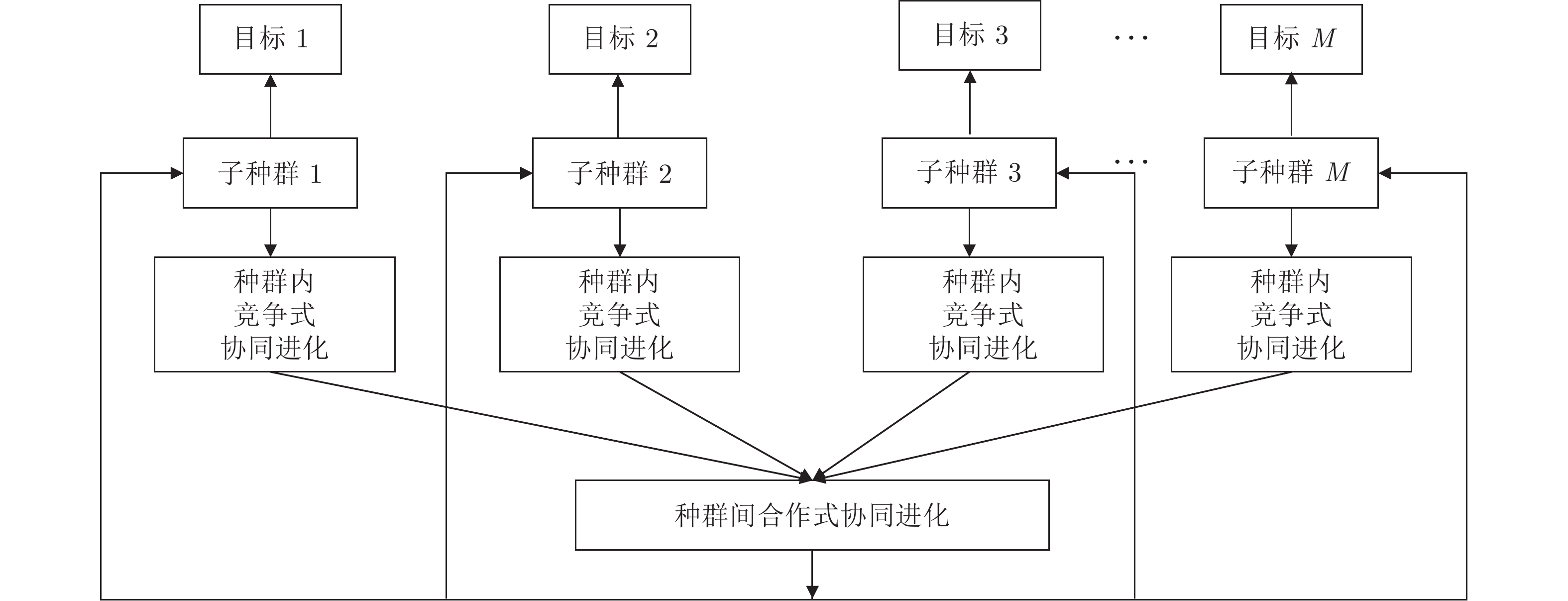
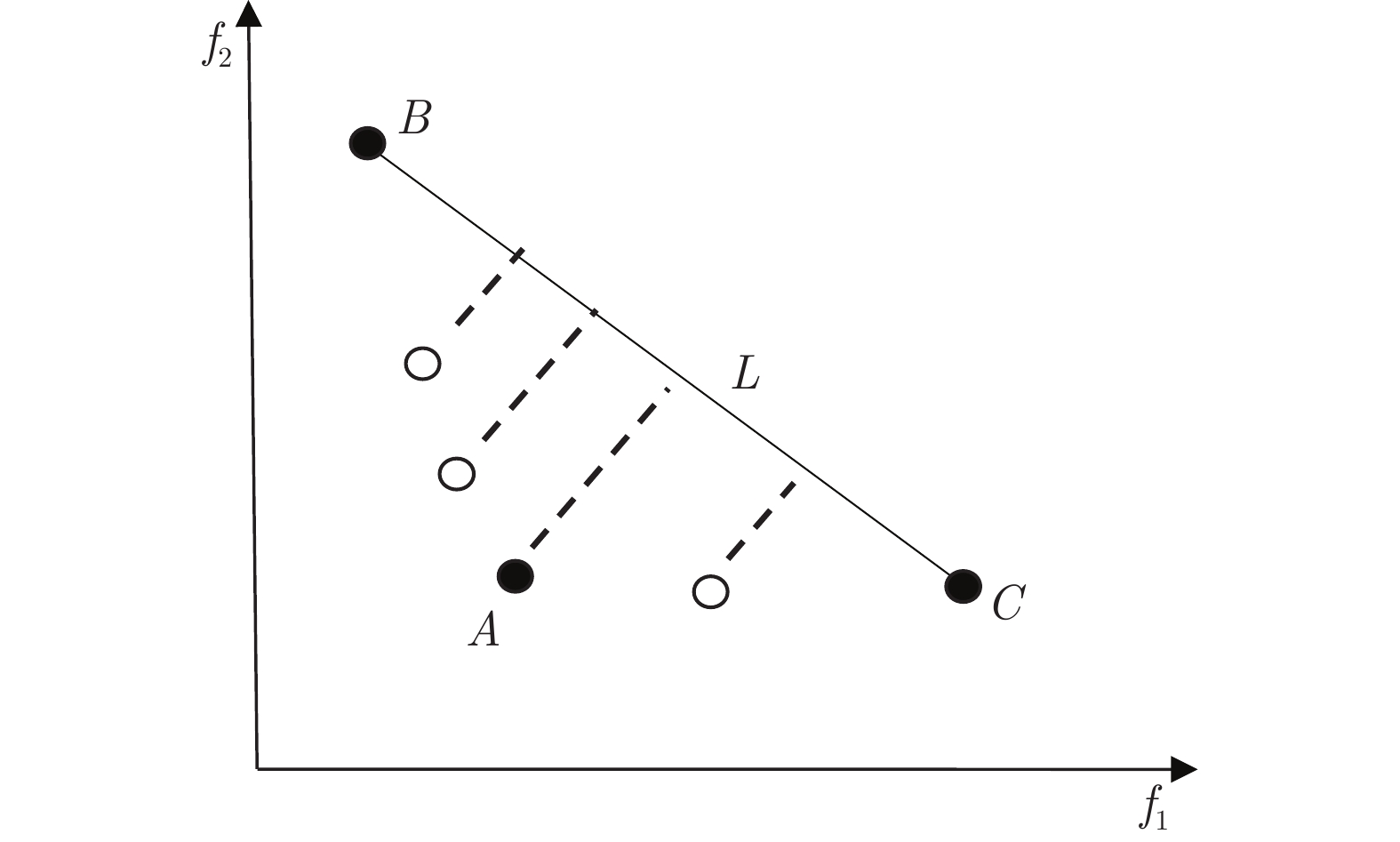
图 2 种群间合作种群内竞争的协同进化策略
Fig. 2 Coevolution strategy of inter-population cooperation and intra-population competition
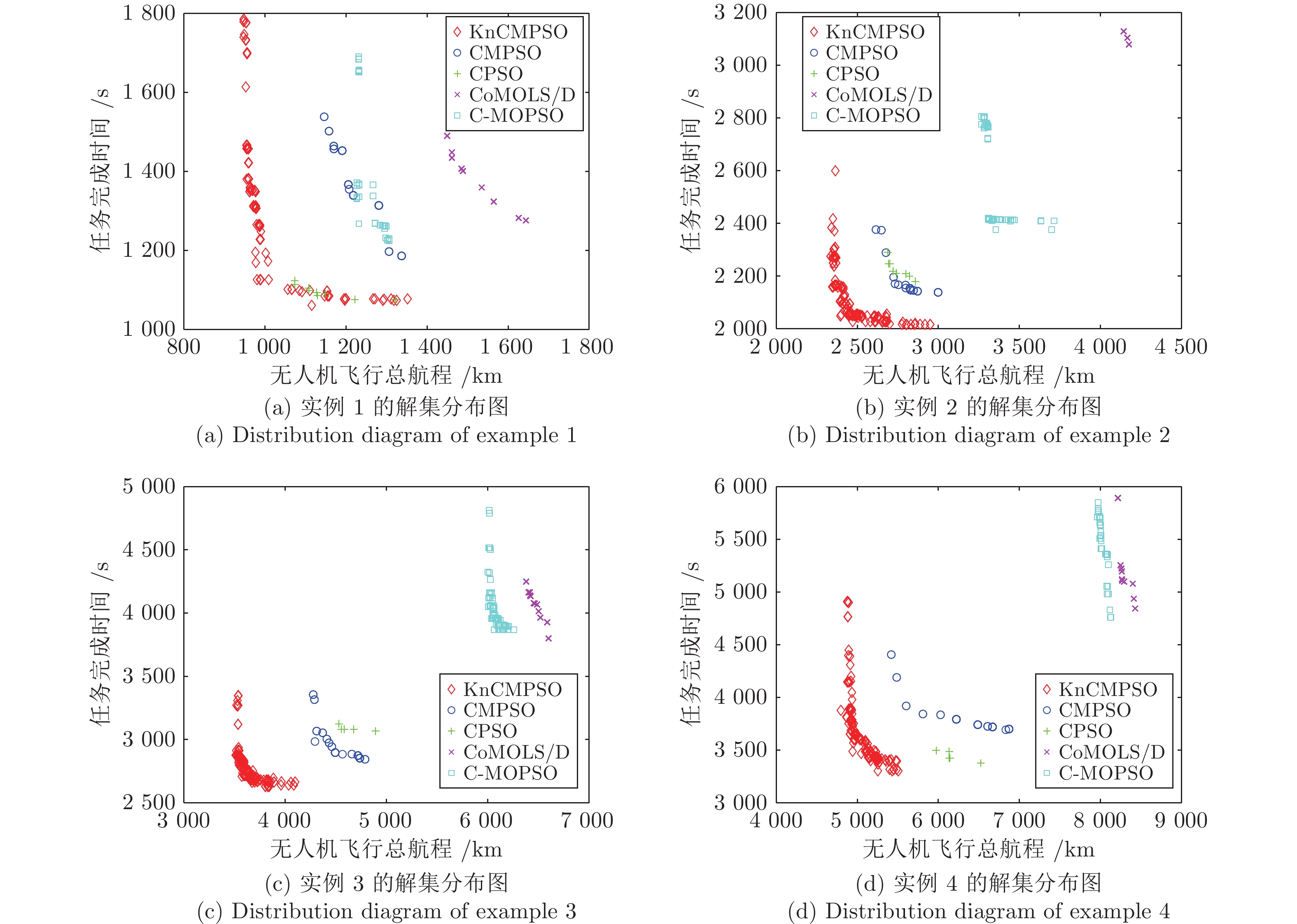
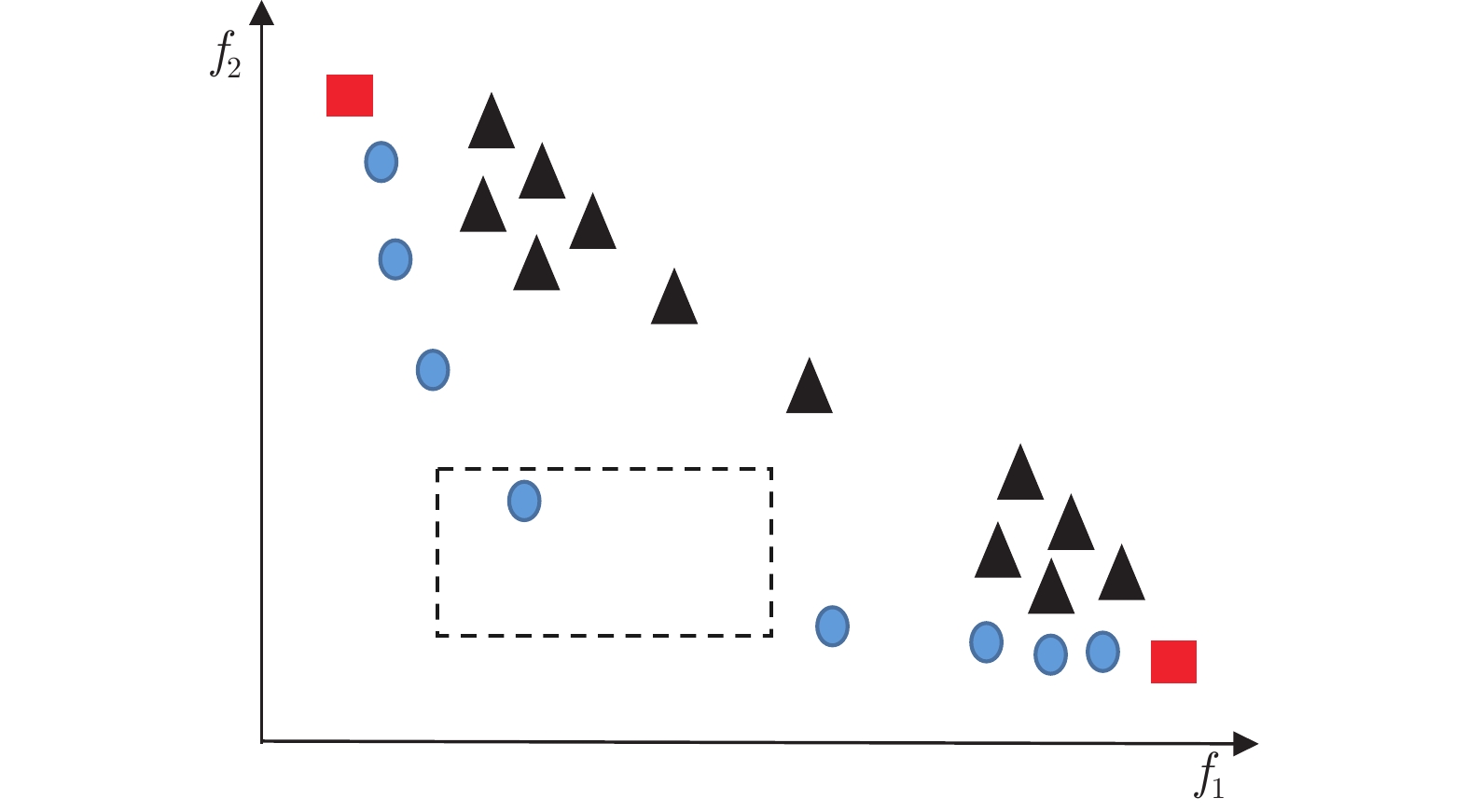
图 9 算法在各实例上的解集的分布图
Fig. 9 Distribution diagram of the solution set of the algorithm on each example
表 1 符号说明
Table 1 Symbol description
类别 属性 侦察无人机总数$S$ 战斗无人机总数$A$ 初始位置$P_i = (x_i, y_i)$ 飞行速度$V_i$ 无人机$U$ 战斗无人机最大携弹数目$Load_i$ 战斗无人机单次任务最大发射弹药数目$Launch_i$ 侦察无人机单次任务最大侦察时间$T_i$ 无人机最大飞行距离${\rm{Max}}Dis_i$ 无人机$U_i$执行任务$M_k$消耗的资源$C_i^k$ 目标总个数$N_T$ 目标位置坐标$P_j = (x_j, y_j)$ 目标$T$ 目标$j$的任务个数$N_M^j=3$ 任务总个数$N_M=3 \times N_T$ 任务$M$ 任务完成所需资源$CR_k$  下载: 导出CSV
下载: 导出CSV
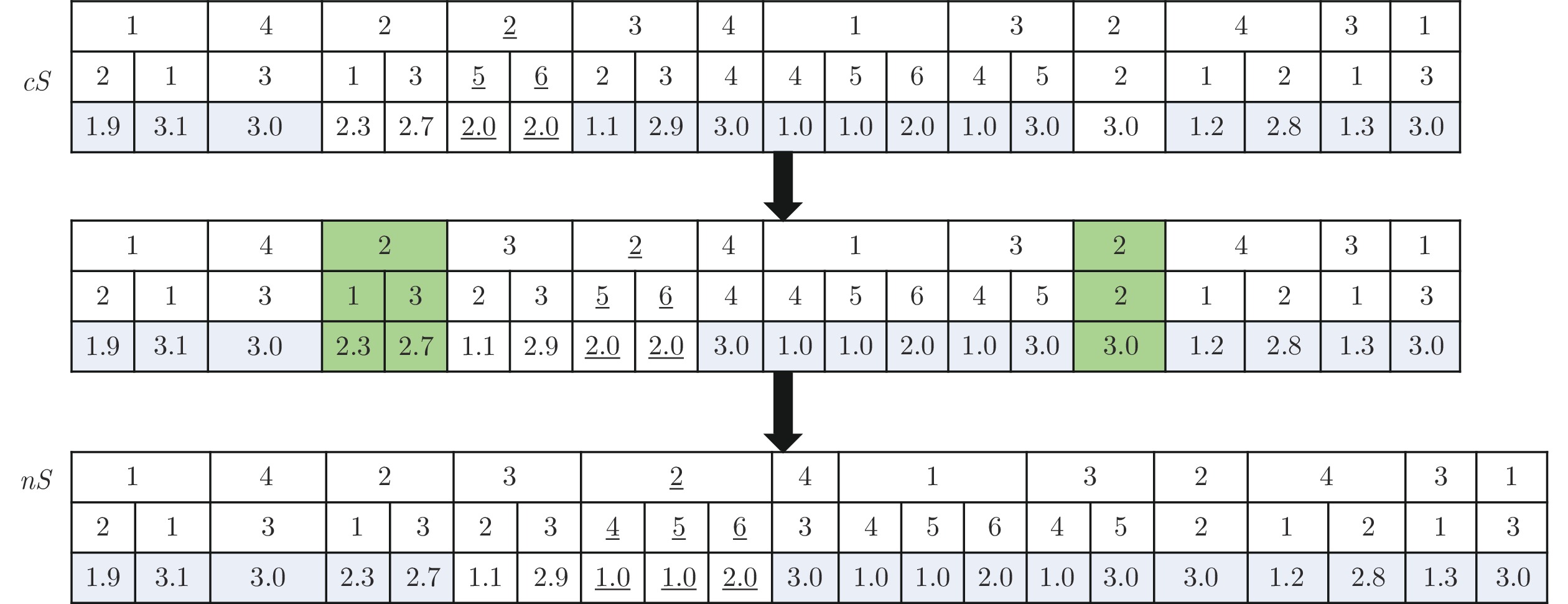
表 2 粒子编码方式
Table 2 Particle encoding scheme
目标编号$T$ 1 2 2 1 3 1 3 2 3 无人机编号$U$ 1 3 2 3 4 5 6 5 6 1 2 4 1 2 3 资源消耗$C$ 2.4 2.6 1.1 4.9 2.0 1.0 1.0 2.0 1.0 5.0 3.0 2.0 3.0 0.2 1.1
下载: 导出CSV
表 3 目标队列集合
Table 3 Target formation collection
1 2 3 $\cdots $ $N$ $T_1^O$ $T_2^O$ $T_3^O$ $\cdots $ $T_N^O$ $T_1^A$ $T_2^A$ $T_3^A$ $\cdots $ $T_N^A$ $T_1^E$ $T_2^E$ $T_3^E$ $\cdots $ $T_N^E$
下载: 导出CSV
表 4 无人机集合
Table 4 Drone collection
侦察机$U_S$ $U_1,U_2,\cdots,U_S$ 战斗机$U_A$ $U_{S+1},U_{S+2},\cdots,U_{S+A}$
下载: 导出CSV
表 5 实例4中目标属性值
Table 5 The target attribute value in example 4
目标 坐标
(千米, 千米)观测时间
(秒)打击所需弹药数
(枚)评估时间
(秒)$T1$ (13, 41) 100 2 40 $T2$ (63, 83) 120 1 20 $T3$ (79, 12) 40 3 10 $T4$ (41, 98) 90 4 15 $T5$ (23, 65) 150 2 20 $T6$ (53, 19) 20 2 5 $T7$ (36, 49) 100 2 40 $T8$ (70, 47) 120 1 20 $T9$ (25, 15) 40 3 10 $T10$ (62, 89) 90 4 15 $T11$ (54, 42) 150 2 20 $T12$ (61, 39) 20 2 5 $T13$ (74, 29) 100 2 40 $T14$ (68, 33) 120 1 20 $T15$ (76, 38) 40 3 10 $T16$ (96, 26) 90 4 15 $T17$ (52, 55) 150 2 20 $T18$ (59, 98) 20 2 5 $T19$ (30, 43) 100 2 40 $T20$ (27, 82) 120 1 20 $T21$ (59, 13) 40 3 10 $T22$ (42, 28) 90 4 15 $T23$ (55, 39) 15 2 20 $T24$ (8, 46) 20 2 5
下载: 导出CSV
表 6 实例4中无人机属性值
Table 6 Attribute value of drone in example 4
无人机 坐标
(千米, 千米)无人机类型 携带弹药数
(枚)飞行速度
(千米/秒)$U1$ (57, 5) 侦察机 0 0.10 $U2$ (42, 8) 侦察机 0 0.12 $U3$ (50, 99) 侦察机 0 0.12 $U4$ (62, 25) 侦察机 0 0.11 $U5$ (20, 61) 侦察机 0 0.1 $U6$ (83, 46) 侦察机 0 0.12 $U7$ (56, 90) 侦察机 0 0.11 $U8$ (39, 45) 侦察机 0 0.11 $U9$ (58, 69) 侦察机 0 0.11 $U10$ (13, 86) 侦察机 0 0.1 $U11$ (5, 57) 侦察机 0 0.11 $U12$ (86, 46) 战斗机 11 0.13 $U13$ (89, 34) 战斗机 8 0.09 $U14$ (53, 11) 战斗机 10 0.11 $U15$ (92, 86) 战斗机 9 0.09 $U16$ (96, 18) 战斗机 12 0.11 $U17$ (73, 76) 战斗机 8 0.16 $U18$ (47, 56) 战斗机 7 0.16 $U19$ (56, 80) 战斗机 8 0.12 $U20$ (78, 4) 战斗机 9 0.16
下载: 导出CSV
表 7 算法在各个实例上的HV值
Table 7 The HV value of the algorithm on each example
实例名称 HV CMPSO CoMOLS/D CPSO C-MOPSO KnCMPSO 实例 1 Mean ${\underline{1.941 \times 10^{8}}}$ $1.846\times10^8$ $1.934\times10^8$ $1.873\times10^8$ ${\bf 1.963}\times10^8$ Std ${\underline{1.326\times10^6}}$ $2.035\times10^6$ $1.574\times10^6$ $2.483\times10^6$ ${\bf{1.053\times10^6}}$ Worst ${\underline{1.918\times10^8}}$ $1.799\times10^8$ $1.893\times10^8$ $1.836\times10^8$ ${\bf{1.942\times10^8}}$ Best ${\underline{1.969\times10^8}}$ $1.881\times10^8$ $1.958\times10^8$ $1.937\times10^8$ ${\bf{1.982\times10^8}}$ 实例 2 Mean ${\underline{1.586\times10^8}}$ $1.312\times10^8$ $1.554\times10^8$ $1.371\times10^8$ ${\bf{1.629\times10^8}}$ Std ${\bf{2.916\times10^6}}$ $3.387\times10^6$ $3.158\times10^6$ $3.523\times10^6$ ${\underline{3.114\times10^6}}$ Worst ${\underline{1.525\times10^8}}$ $1.259\times10^8$ $1.494\times10^8$ $1.297\times10^8$ ${\bf{1.544\times10^8}}$ Best ${\underline{1.640\times10^8}}$ $1.371\times10^8$ $1.637\times10^8$ $1.464\times10^8$ ${\bf{1.675\times10^8}}$ 实例 3 Mean ${\underline{1.326\times10^8}}$ $9.365\times10^7$ $1.284\times10^8$ $1.032\times10^8$ ${\bf{1.387\times10^8}}$ Std ${\bf{3.133\times10^6}}$ $4.722\times10^6$ ${\underline{3.174\times10^6}}$ $4.292\times10^6$ $4.271\times10^6$ Worst ${\underline{1.265\times10^8}}$ $8.571\times10^7$ $1.208\times10^8$ $9.782\times10^7$ ${\bf{1.289\times10^8}}$ Best ${\underline{1.383\times10^8}}$ $1.029\times10^8$ $1.365\times10^8$ $1.130\times10^8$ ${\bf{1.487\times10^8}}$ 实例 4 Mean ${\underline{1.103\times10^8}}$ $6.209\times10^7$ $1.027\times10^8$ $7.068\times10^7$ ${\bf{1.151\times10^8}}$ Std $4.482\times10^6$ ${\underline{3.658\times10^6}}$ $4.850\times10^6$ ${\bf{3.056\times10^6}}$ $6.337\times10^6$ Worst ${\underline{9.913\times10^7}}$ $5.582\times10^7$ $9.023\times10^7$ $6.601\times10^7$ ${\bf{1.033\times10^8}}$ Best ${\underline{1.192\times10^8}}$ $6.970\times10^7$ $1.116\times10^8$ $7.631\times10^7$ ${\bf{1.241\times10^8}}$
下载: 导出CSV
表 8 算法在各个实例上的HV值
Table 8 The HV value of the algorithm on each example
实例名称 HV KnCMPSO-SLR KnCMPSO 实例 1 Mean $1.951\times10^8$ ${\bf{1.974\times10^8}}$ Std ${\bf{7.942\times10^5}}$ $1.046\times10^6$ Worst $1.934\times10^8$ ${\bf{1.959\times10^8}}$ Best $1.961\times10^8 $ ${\bf{1.989\times10^8 }}$ 实例 2 Mean ${\bf{1.625\times10^8}}$ $1.622\times10^8$ Std $3.290\times10^6 $ ${\bf{1.632\times10^6}}$ Worst $1.569\times10^8 $ ${\bf{1.598\times10^8 }}$ Best ${\bf{1.690\times10^8}}$ $1.645\times10^8$ 实例 3 Mean $1.347\times10^8 $ ${\bf{1.395\times10^8}}$ Std ${\bf{2.031\times10^6}}$ $3.099\times10^6 $ Worst $1.318\times10^8 $ ${\bf{1.361\times10^8}}$ Best $1.385\times10^8 $ ${\bf{1.449\times10^8}}$ 实例 4 Mean $1.146\times10^8 $ ${\bf{1.184\times10^8}}$ Std ${\bf{2.251\times10^6}}$ $3.492\times10^6 $ Worst $1.087\times10^8$ ${\bf{1.124\times10^8}}$ Best $1.165\times10^8$ ${\bf{1.241\times10^8}}$
下载: 导出CSV
表 9 算法在各个实例上的HV值
Table 9 The HV value of the algorithm on each example
实例名称 HV KnCMPSO-PF KnCMPSO-FR KnCMPSO-SR KnCMPSO 实例 1 Mean ${\underline{1.800\times10^8}}$ $1.782\times10^8 $ $1.786\times10^8 $ ${\bf{1.861\times10^8}}$ Std ${\underline{3.005\times10^6}}$ $3.881\times10^6 $ $ 3.778\times10^6 $ ${\bf{1.948\times10^6 }}$ Worst ${\underline{1.721\times10^8}}$ $1.703\times10^8$ $1.705\times10^8 $ ${\bf{1.800\times10^8}}$ Best ${\underline{1.860\times10^8}}$ $1.837\times10^8$ $1.839\times10^8 $ ${\bf{1.898\times10^8}}$ 实例 2 Mean ${\underline{1.362\times10^8}}$ $1.346\times10^8$ $1.356\times10^8 $ ${\bf{1.449\times10^8}}$ Std ${\underline{4.110\times10^6}}$ ${\bf{3.981\times10^6}}$ $4.166\times10^6 $ $4.562\times10^6 $ Worst $1.275\times10^8 $ $1.257\times10^8$ ${\underline{1.296\times10^8}}$ ${\bf{1.362\times10^8}}$ Best $1.435\times10^8$ $1.426\times10^8$ ${\underline{1.453\times10^8}}$ ${\bf{1.529\times10^8}}$ 实例 3 Mean ${\underline{1.046\times10^8 }}$ $1.036\times10^8$ $1.003\times10^8 $ ${\bf{1.175\times10^8}}$ Std $4.892\times10^6$ $6.045\times10^6$ ${\underline{4.629\times10^6}}$ ${\bf{4.027\times10^6}}$ Worst ${\underline{9.602\times10^7}}$ $8.900\times10^7$ $8.618\times10^7$ ${\bf{1.112\times10^8}}$ Best ${\underline{1.145\times10^8}}$ $1.139\times10^8$ $1.066\times10^8$ ${\bf{1.243\times10^8}}$ 实例 4 Mean ${\underline{7.920\times10^7}}$ $7.851\times10^7$ $7.833\times10^7$ ${\bf{9.603\times10^7}}$ Std $6.365\times10^6$ $6.608\times10^6$ ${\underline{6.008\times10^6}}$ ${\bf{5.376\times10^6}}$ Worst ${\underline{6.537\times10^7}}$ $6.412\times10^7$ $6.007\times10^7 $ ${\bf{8.466\times10^7}}$ Best ${\underline{9.105\times10^7}}$ $8.916\times10^7$ $8.653\times10^7$ ${\bf{1.045\times10^8}}$
下载: 导出CSV
A1 实例3中目标属性值
A1 The target attribute value in example 3
目标 坐标
(千米, 千米)观测时间
(秒)打击所需弹药数
(枚)评估时间
(秒)$T1$ (13, 41) 100 2 40 $T2$ (63, 83) 120 1 20 $T3$ (79, 12) 40 3 10 $T4$ (41, 98) 90 4 15 $T5$ (23, 65) 150 2 20 $T6$ (53, 19) 20 2 5 $T7$ (36, 49) 100 2 40 $T8$ (70, 47) 120 1 20 $T9$ (25, 15) 40 3 10 $T10$ (62, 89) 90 4 15 $T11$ (54, 42) 150 2 20 $T12$ (61, 39) 20 2 5 $T13$ (74, 29) 100 2 40 $T14$ (68, 33) 120 1 20 $T15$ (76, 38) 40 3 10 $T16$ (96, 26) 90 4 15 $T17$ (52, 55) 150 2 20 $T18$ (59, 98) 20 2 5
下载: 导出CSV
A2 实例3中无人机属性值
A2 Attribute value of drone in example 3
无人机 坐标
(千米, 千米)无人机类型 携带弹药数
(枚)飞行速度
(千米/秒)$U1$ (57, 5) 侦察机 0 0.10 $U2$ (42, 8) 侦察机 0 0.12 $U3$ (50, 99) 侦察机 0 0.12 $U4$ (62, 25) 侦察机 0 0.11 $U5$ (20, 61) 侦察机 0 0.10 $U6$ (83, 46) 侦察机 0 0.12 $U7$ (56, 90) 侦察机 0 0.11 $U8$ (39, 45) 侦察机 0 0.11 $U9$ (58, 69) 侦察机 0 0.11 $U10$ (13, 86) 侦察机 0 0.10 $U11$ (56, 80) 战斗机 8 0.12 $U12$ (86, 46) 战斗机 9 0.13 $U13$ (89, 34) 战斗机 7 0.09 $U14$ (53, 11) 战斗机 9 0.11 $U15$ (92, 86) 战斗机 7 0.09 $U16$ (96, 18) 战斗机 9 0.11 $U17$ (73, 76) 战斗机 7 0.16 $U18$ (47, 56) 战斗机 5 0.16
下载: 导出CSV
A3 实例2中目标属性值
A3 The target attribute value in example 2
目标 坐标
(千米, 千米)观测时间
(秒)打击所需弹药数
(枚)评估时间
(秒)$T1$ (13, 41) 100 2 40 $T2$ (63, 83) 120 1 20 $T3$ (79, 12) 40 3 10 $T4$ (41, 98) 90 4 15 $T5$ (23, 65) 150 2 20 $T6$ (53, 19) 20 2 5 $T7$ (36, 49) 100 2 40 $T8$ (70, 47) 120 1 20 $T9$ (25, 15) 40 3 10 $T10$ (62, 89) 90 4 15 $T11$ (54, 42) 150 2 20 $T12$ (61, 39) 20 2 5
下载: 导出CSV
A4 实例2中无人机属性值
A4 Attribute value of drone in example 2
无人机 坐标
(千米, 千米)无人机类型 携带弹药数
(枚)飞行速度
(千米/秒)$U1$ (73, 91) 侦察机 0 0.10 $U2$ (65, 64) 侦察机 0 0.12 $U3$ (56, 37) 侦察机 0 0.12 $U4$ (36, 96) 侦察机 0 0.11 $U5$ (20, 0) 侦察机 0 0.10 $U6$ (1, 68) 侦察机 0 0.12 $U7$ (51, 74) 侦察机 0 0.11 $U8$ (58, 69) 侦察机 0 0.11 $U9$ (13, 86) 侦察机 0 0.10 $U10$ (69, 20) 战斗机 10 0.10 $U11$ (52, 46) 战斗机 6 0.12 $U12$ (46, 98) 战斗机 7 0.13 $U13$ (92, 86) 战斗机 5 0.09 $U14$ (96, 18) 战斗机 7 0.11 $U15$ (73, 76) 战斗机 5 0.16 $U16$ (47, 56) 战斗机 5 0.16
下载: 导出CSV
A5 实例1中目标属性值
A5 The target attribute value in example 1
目标 坐标
(千米, 千米)观测时间
(秒)打击所需弹药数
(枚)评估时间
(秒)$T1$ (36, 49) 100 2 40 $T2$ (70, 47) 120 1 20 $T3$ (25, 15) 40 3 10 $T4$ (62, 89) 90 4 15 $T5$ (54, 42) 150 2 20 $T6$ (61, 39) 20 2 5
下载: 导出CSV
A6 实例1中无人机属性值
A6 Attribute value of drone in example 1
无人机 坐标
(千米, 千米)无人机类型 携带弹药数
(枚)飞行速度
(千米/秒)$U1$ (73, 91) 侦察机 0 0.10 $U2$ (94, 92) 侦察机 0 0.12 $U3$ (56, 37) 侦察机 0 0.12 $U4$ (5, 57) 侦察机 0 0.11 $U5$ (20, 0) 侦察机 0 0.10 $U6$ (1, 68) 侦察机 0 0.12 $U7$ (51, 74) 侦察机 0 0.11 $U8$ (11, 90) 侦察机 0 0.11 $U9$ (73, 76) 战斗机 5 0.16 $U10$ (69, 20) 战斗机 10 0.10 $U11$ (52, 46) 战斗机 6 0.12 $U12$ (46, 98) 战斗机 7 0.13 $U13$ (92, 86) 战斗机 5 0.09 $U14$ (79, 4) 战斗机 7 0.11
下载: 导出CSV
-
[1] 杜永浩, 邢立宁, 蔡昭权. 无人飞行器集群智能调度技术综述. 自动化学报, 2022, 46(2): 222-241Du Yong-Hao, Xing Li-Ning, Cai Zhao-Quan. Summary of intelligent dispatching technology of unmanned aerial vehicle cluster. Acta Automatica Sinica, 2020, 46(2): 222-241 [2] Deng Q B, Yu J Q, Wang N F. Cooperative task assignment of multiple heterogeneous unmanned aerial vehicles using a modified genetic algorithm with multi-type genes. Chinese Journal of Aeronautics, 2013, 26(5): 1238-1250 doi: 10.1016/j.cja.2013.07.009 [3] 贾高伟, 王建峰. 无人机集群任务规划方法研究综述. 系统工程与电子技术, 2021, 43(1): 99-111 doi: 10.3969/j.issn.1001-506X.2021.01.13Jia Gao-Wei, Wang Jian-Feng. Overview of research on UAV cluster mission planning methods. Systems Engineering and Electronics, 2021, 43(1): 99-111 doi: 10.3969/j.issn.1001-506X.2021.01.13 [4] Shima T, Rasmussen S J, Sparks A G, Passino K M. Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms. Computers & Operations Research, 2006, 33(11): 3252-3269 [5] 黄刚, 李军华. 基于AC-DSDE进化算法多UAVs协同目标分配. 自动化学报, 2021, 47(1): 173-184Huang Gang, Li Jun-Hua. Multi-UAV cooperative target allocation based on AC-DSDE evolutionary algorithm. Acta Automatica Sinica, 2021, 47(1): 173-184 [6] Huang L W, Qu H, Zuo L. Multi-type UAVs cooperative task allocation under resource constraints. IEEE Access, 2013, 6: 17841-17850 [7] Ye F, Chen J, Tian Y, Jiang T. Cooperative task assignment of a heterogeneous multi-UAV system using an adaptive genetic algorithm. Electronics, 2020, 9(4): 687-703 doi: 10.3390/electronics9040687 [8] Xu G T, Liu L, Long T, Wang Z, Cai M. Cooperative multiple task assignment considering precedence constraints using multi-chromosome encoded genetic algorithm. In: Proceedings of the AIAA Guidance, Navigation, and Control Conference. Kissimmee, USA: 2018. 1859−1867 [9] Lei C, He S T, Hui P, Ming C P. Multiple UAVs hierarchical dynamic task allocation based on PSO-FSA and decentralized auction. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics. Bali, Indonesia: IEEE, 2014. 2368−2373 [10] 韩博文, 姚佩阳, 孙昱. 基于多目标MSQPSO算法的UAVS协同任务分配. 电子学报, 2017, 45(8): 1856-1863 doi: 10.3969/j.issn.0372-2112.2017.08.008Han Bo-Wen, Yao Pei-Yang, Sun Yu. UAVS cooperative task allocation based on multi-objective MSQPSO algorithm. Acta Electronica Sinica, 2017, 45(8): 1856-1863 doi: 10.3969/j.issn.0372-2112.2017.08.008 [11] 王峰, 张衡, 韩孟臣, 邢立宁. 基于协同进化的混合变量多目标粒子群优化算法求解无人机协同多任务分配问题. 计算机学报, 2021, 44(10): 1967-1983 doi: 10.11897/SP.J.1016.2021.01967Wang Feng, Zhang Heng, Han Meng-Chen, Xing Li-Ning. Hybrid variable multi-objective particle swarm optimization algorithm based on co-evolution to solve UAV cooperative multi-task assignment problem. Chinese Journal of Computers, 2021, 44(10): 1967-1983 doi: 10.11897/SP.J.1016.2021.01967 [12] 杜永浩, 邢立宁, 姚锋, 陈盈果. 航天器任务调度模型、算法与通用求解技术综述. 自动化学报, 2021, 47(12): 2715-2741Du Yong-Hao, Xing Li-Ning, Yao Feng, Chen Ying-Guo. Survey on models, algorithms and general techniques for spacecraft mission scheduling. Acta Automatica Sinica, 2021, 47(12): 2715-2741 [13] Shi Y, Eberhart R. A modified particle swarm optimizer. In: Proceedings of the IEEE International Conference on Evolutionary Computation. Anchorage, USA: IEEE, 1998. 69−73 [14] 梁国强, 康宇航, 邢志川, 尹高扬. 基于离散粒子群优化的无人机协同多任务分配. 计算机仿真, 2018, 35(02): 22-28 doi: 10.3969/j.issn.1006-9348.2018.02.005Liang Guo-Qiang, Kang Yu-Hang, Xing Zhi-Chuan, Yin Gao-Yang. Cooperative multitask assignment of UAV based on discrete particle swarm optimization. Computer Simulation, 2018, 35(02): 22-28 doi: 10.3969/j.issn.1006-9348.2018.02.005 [15] 邓可, 连振江, 周德云, 李枭扬. 基于改进量子粒子群算法的多无人机任务分配. 指挥控制与仿真, 2018, 40(05): 32-36 doi: 10.3969/j.issn.1673-3819.2018.05.007Deng Ke, Lian Zhen-Jiang, Zhou De-Yun, Li Xiao-Yang. Multi-UAV task allocation based on improved quantum particle swarm algorithm. Command Control and Simulation, 2018, 40(05): 32-36 doi: 10.3969/j.issn.1673-3819.2018.05.007 [16] Wang J F, Jia G W, Lin J C, Hou Z X. Cooperative task allocation for heterogeneous multi-UAV using multi-objective optimization algorithm. Journal of Central South University, 2020, 27(2): 432-448 doi: 10.1007/s11771-020-4307-0 [17] 田震, 王晓芳. 基于多基因遗传算法的异构多无人机协同任务分配. 飞行力学, 2019, 37(01): 39-44Tian Zhen, Wang Xiao-Fang. Cooperative multiple task assignment for heterogeneous multi-UAVs with multi-chromosome genetic algorithm. Flight Dynamics, 2019, 37(01): 39-44 [18] He C, Cheng R, Tian Y, Zhang X Y, Tan K C, Jin Y C. Paired offspring generation for constrained large-scale multiobjective optimization. IEEE Transactions on Evolutionary Computation, 2020, 25(3): 448-462 [19] Wang F, Li Y, Zhou A M, Tang K. An estimation of distribution algorithm for mixed-variable newsvendor problems. IEEE Transactions on Evolutionary Computation, 2019, 24(3): 479-493 [20] Chen W N, Jia Y H, Zhao F, Luo X N, Jia X D, Zhang J. A cooperative co-evolutionary approach to large-scale multisource water distribution network optimization. IEEE Transactions on Evolutionary Computation, 2019, 23(5): 842-857 doi: 10.1109/TEVC.2019.2893447 [21] Menchaca-Méndez A, Montero E, Antonio L M, Zapotecas-Martínez S, Coello C A C, Riff M C. A co-evolutionary scheme for multi-objective evolutionary algorithms based on ϵ-dominance. IEEE Access, 2019, 7: 18267-18283 doi: 10.1109/ACCESS.2019.2896962 [22] Zheng F, Zecchin A C, Simpson A R. Self-adaptive differential evolution algorithm applied to water distribution system optimization. Journal of Computing in Civil Engineering, 2013, 27(2): 148-158 doi: 10.1061/(ASCE)CP.1943-5487.0000208 [23] Cervantes-Culebro H, Cruz-Villar C A, Peñaloza M G M, Mezura-Montes E. Constraint-handling techniques for the concurrent design of a five-bar parallel robot. IEEE Access, 2017, 5: 23010-23021 doi: 10.1109/ACCESS.2017.2764883 [24] He C, Cheng R, Zhang C, Tian Y, Chen Q, Yao X. Evolutionary large-scale multiobjective optimization for ratio error estimation of voltage transformers. IEEE Transactions on Evolutionary Computation, 2020, 24(5): 868-881 doi: 10.1109/TEVC.2020.2967501 [25] Ma Z, Wang Y, Song W. A new fitness function with two rankings for evolutionary constrained multiobjective optimization. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(8): 5005-5016 doi: 10.1109/TSMC.2019.2943973 [26] Wang B C, Li H X, Li J P, Wang Y. Composite differential evolution for constrained evolutionary optimization. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 49(7): 1482-1495 [27] Zhou Y L, Zhu M, Wang J H, Zhang Z Z, Xiang Y, Zhang J. Tri-goal evolution framework for constrained many-objective optimization. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 50(8): 3086-3099 [28] Edison E, Shima T. Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Computers & Operations Research, 2011, 38(1): 340-356 [29] 王凌, 沈婧楠, 王圣尧, 邓瑾. 协同进化算法研究进展. 控制与决策, 2015, 30(02): 193-202Wang Ling, Shen Jing-Nan, Wang Sheng-Yao Deng Jin. Advances in co-evolutionary algorithms. Control and Decision, 2015, 30(02): 193-202 [30] Zhan Z H, Li J J, Cao J N, Zhang J, Chung H S H, Shi Y H. Multiple populations for multiple objectives: a coevolutionary technique for Solving multiobjective optimization problems. IEEE Transactions on Cybernetics, 2013, 43(2): 445-463 doi: 10.1109/TSMCB.2012.2209115 [31] Liu X F, Zhan Z H, Gao Y, Zhang J, Kwong S, Zhang J. Coevolutionary particle swarm optimization with bottleneck objective learning strategy for many-objective optimization. IEEE Transactions on Evolutionary Computation, 2018, 23(4): 587-602 [32] Cai X, Hu M, Gong D W, Guo Y N, Zhang Y, Fan Z, et al. A decomposition-based coevolutionary multiobjective local search for combinatorial multiobjective optimization. Swarm & Evolutionary Computation, 2019, 49: 178-193 -

 下载:
下载:



计量
- 文章访问数: 1736
- HTML全文浏览量: 639
- PDF下载量: 485
- 被引次数: 0
