

-
摘要: 高精度时间同步是任务关键型工业网络控制系统的核心支撑技术, 针对工业环境中普遍存在周期性振动等扰动信号导致晶振频率漂移, 影响时间同步精度的问题, 基于扩展比例积分(Proportional integral, PI)观测器, 提出一种新型的抗扰补偿器结构, 用于消除周期性扰动的影响, 并构建了相应的精细抗干扰反馈控制方法, 用于实现高精度时间同步. 与传统的扰动观测器相比, 所提出的扩展$ \mathrm{P}\mathrm{I} $抗扰补偿器克服了传统扰动观测器零点不变局限性, 提出了零点配置方法, 以充分利用闭环系统的传递函数矩阵(Transfer function matrix, TFM)在系统零点处降秩的特性, 实现了对于特定频率扰动信号的补偿作用. 并给出了所提出的控制器和抗扰补偿器的稳定性证明和控制器参数的稳定域. 通过基于实测参数的无线网络仿真实验, 验证了在$5\;\mathrm{g}$周期性振动干扰下, 提出的方法明显优于传统滤波器和补偿器, 达到了同步误差在4 μs以内, 实现了高精度时间同步.Abstract: Precision time synchronization is one of the enabling technologies for mission-critical industrial networked control systems. To address the precision degradation due to crystal oscillator's frequency drift caused by external disturbances and environment changes, such as the periodic acceleration and vibration which are and commonly found in industrial environments, this paper proposes a novel disturbance compensation structure based on an extended proportional integral (PI) observer for effectively eliminating the effects of periodic disturbances. A disturbance rejection feedback control method is proposed to achieve the precision time synchronization. The proposed extended PI disturbance compensator overcomes the zero-point invariance limitation of the conventional disturbance observer and a zero-point configuration is adopted to make full use of the rank deficiency of the transfer function matrix (TFM) at zeros of the closed-loop system to achieve the compensation effect for frequency-specific disturbance signals. The stability of the proposed controller and disturbance compensator is proved and the convergence domain of the controller parameters is also given. Through the simulation experiments of the wireless network based on measured parameters, it is verified that the proposed method significantly outperforms the conventional observers and compensators and synchronization errors within 4 μs are achieved under $ 5\;\mathrm{g} $ periodic vibration.
-
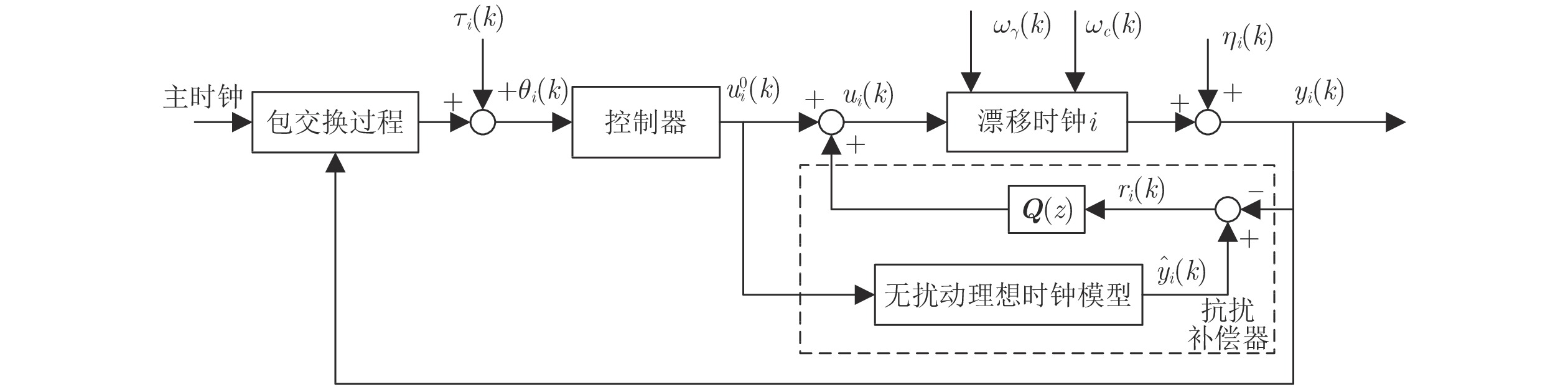
图 2 基于抗扰补偿器的时间同步系统框图
Fig. 2 Block diagram of the time synchronization system with the disturbance compensator

图 3 扩展PI抗扰补偿器结构图
Fig. 3 Structure of the proposed extended PI disturbance compensators
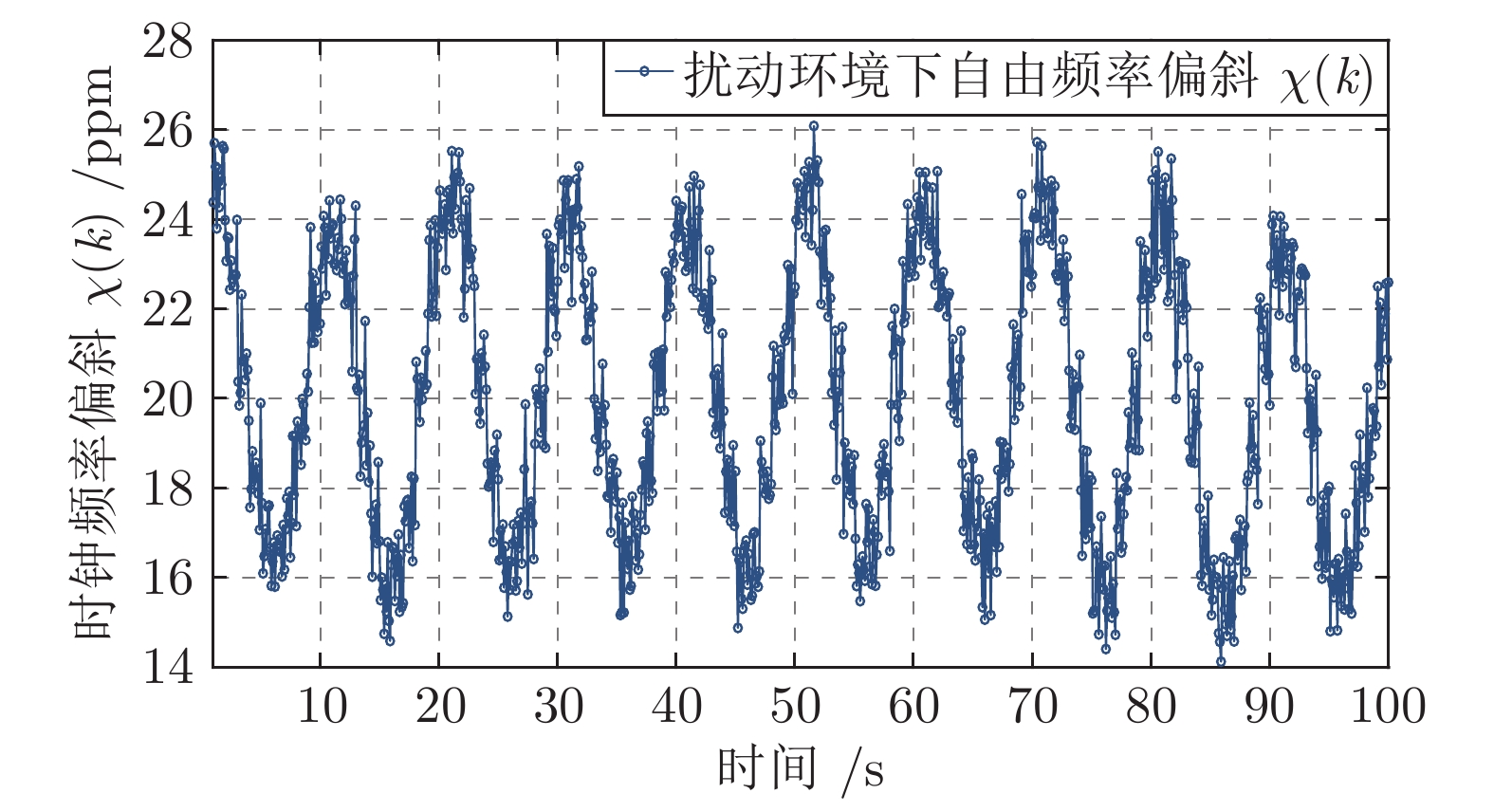
图 5 自由时钟频率偏斜$ \chi \left(k\right) $的变化曲线
Fig. 5 A free drifting clock's frequency skew $ \chi(k) $
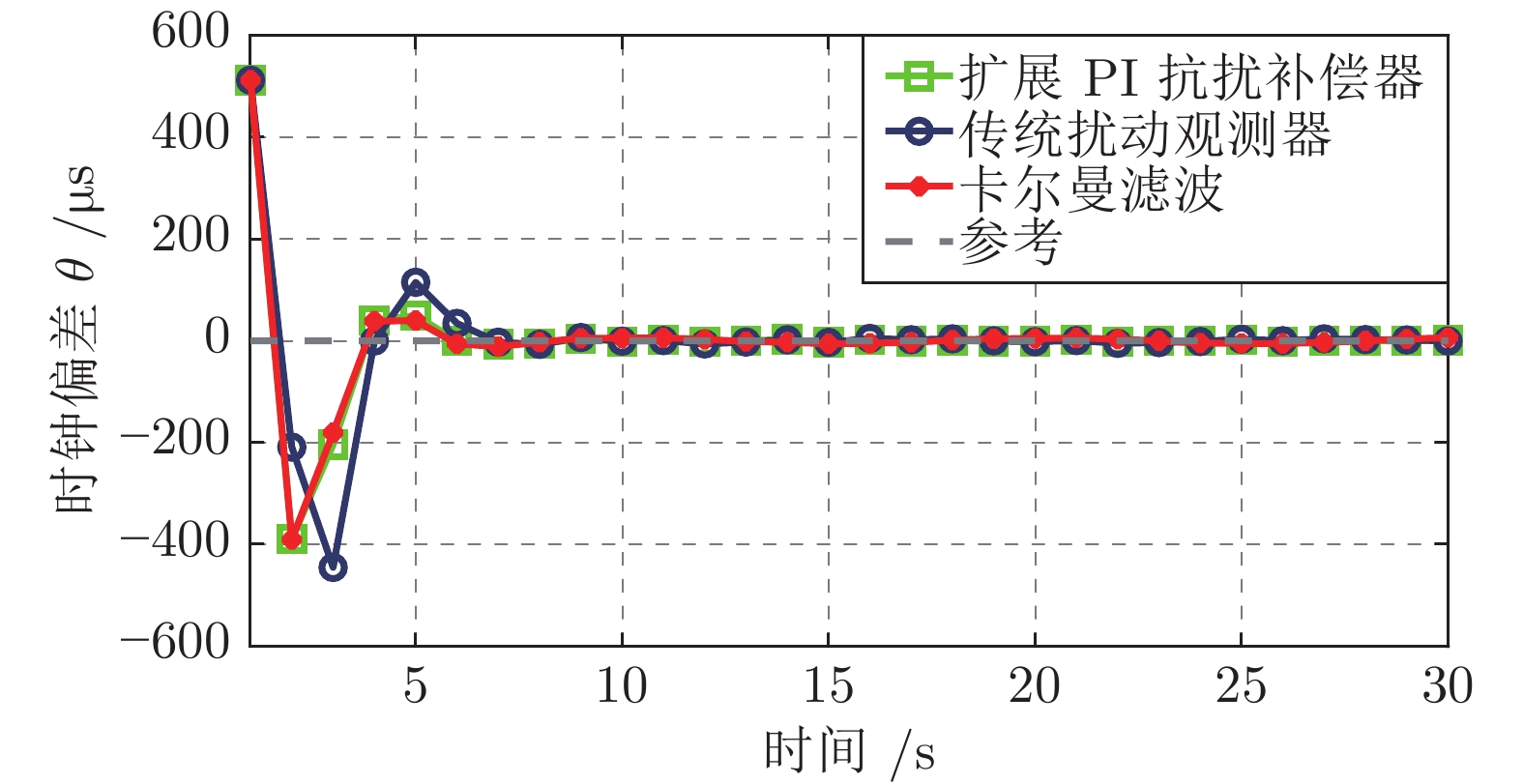
图 7 不同同步方法下的时钟偏差$\theta $收敛曲线
Fig. 7 Convergence of clock offset $ \theta $ of different synchronization methods
-
[1] Zong Y, Dai X, Gao Z. Proportional-integral synchronisation for non-identical wireless packet-coupled oscillators with delays. IEEE Transactions on Industrial Electronics, 2021, 68(11): 11598-11608 doi: 10.1109/TIE.2020.3036228 [2] Elsts A, Fafoutis X, Duquennoy S, et al. Temperature-resilient time synchronization for the internet of things. IEEE Transactions on Industrial Informatics, 2018, 14(5): 2241-2250 doi: 10.1109/TII.2017.2778746 [3] Elson J. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Operating Systems Review, 2003, 36(S1): 147-163 [4] Giorgi G, Narduzzi C. Performance analysis of kalman-filter-based clock synchronization in IEEE 1588 networks. IEEE Transactions on Instrumentation and Measurement, 2011, 60(8): 2902-2909 doi: 10.1109/TIM.2011.2113120 [5] Maróti M, Kusy B, Simon G, Lédeczi Á. The flooding time synchronization protocol. In: Proceedings of International Conference on Embedded Network Sensor System. Baltimore, USA: DBLP, 2004. [6] 孙子文, 吴梦芸, 白勇. 基于多参考节点的WSN时间同步方法. 控制工程, 2016, 23(01): 12-17Sun Zi-Wen, Wu Meng-Yun, Bai Yong. A time synchronization method for WSN based on multiple reference nodes, Control Engineering of China, 2016, 23(01): 12-17 [7] Wang H, Yu F, Li M, Zhong Y. Clock skew estimation for timestamp-free synchronization in industrial wireless sensor networks, IEEE Transactions on Industrial Informatics, 2021, 60(8): 2902–2909 [8] Yang T, Y Niu, Yu J. Clock synchronization in wireless sensor networks based on bayesian estimation. IEEE Access, 2020, 8: 69683-69694 doi: 10.1109/ACCESS.2020.2984785 [9] Carli R, Chiuso A, Schenato L, Zampieri S. Optimal synchronization for networks of noisy double integrators. IEEE Transactions on Automatic Control, 2011, 56(5): 1146-1152 doi: 10.1109/TAC.2011.2107051 [10] Yildirim K S. Gradient descent algorithm inspired adaptive time synchronization in wireless sensor networks. IEEE Sensors Journal, 2016, 16(13): 5463-5470 doi: 10.1109/JSEN.2016.2555996 [11] Yildirim K S, Carli R, Schenato L. Adaptive proportional-integral clock synchronization in wireless sensor networks. IEEE Transactions on Control Systems Technology, 2018, 26(2): 610-623 doi: 10.1109/TCST.2017.2692720 [12] Filler R L. The effect of vibration on quartz crystal resonators. Nasa Sti/Recon Technical Report N, 1980. [13] 杨东岳, 梅杰. 有向图中基于扰动观测器的线性多智能体系统一致性. 自动化学报, 2018, 44(6): 1037−1044Yang Dong-Yue, Mei Jie. Disturbance observer based consensus of linear multi-agent systems under a directed graph. Acta Automatica Sinica, 2018, 44(6): 1037−1044 [14] Zhou K, Zhang R. A new controller architecture for high performance, robust, and fault-tolerant control. IEEE Transactions on Automatic Control, 2001, 46(10): 1613-1618 doi: 10.1109/9.956059 [15] Wang D, Qiao J, Cheng L. An approximate neuro-optimal solution of discounted guaranteed cost control design. IEEE Transactions on Cybernetics, 2022, 52(1): 77−86 [16] F Ye, Sun B, Ou L, Zhang W. Disturbance observer-based control for consensus tracking of multi-agent systems with input delays from a frequency domain perspective. Systems & Control Letters, 2018, 114: 66-75 [17] Chen W H, Yang J, Guo L, Li S H. Disturbance-observer-based control and related methods—an overview. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083-1095 doi: 10.1109/TIE.2015.2478397 [18] 韩京清. 自抗扰控制器及其应用. 控制与决策, 1998, 13(1): 19–23 doi: 10.3321/j.issn:1001-0920.1998.01.005Han Jing-Qing. Auto-disturbances-rejection controller and It’s applications. Control and Decision, 1998, 13(1): 19–23 doi: 10.3321/j.issn:1001-0920.1998.01.005 [19] 王怡怡, 赵志良. 二自由度无人直升机的非线性自抗扰姿态控制. 自动化学报, 2021, 47(8): 1951-1962Wang Yi-Yi, Zhao Zhi-Liang. Nonlinear active disturbance rejection attitude control of two-DOF unmanned helicopter. Acta Automatica Sinica, 2021, 47(8): 1951-1962 [20] Gao Z. Scaling and bandwidth-parameterization based controller tuning. In: Proceedings of the American Control Conference. Denver, USA: IEEE, 2003. 4989–4996 [21] Dai X, Gao Z, Breikin T, Wang H. Zero assignment for robust H2/H∞ fault detection filter design. IEEE Transactions on Signal Processing, 2009, 57(4): 1363-1372 doi: 10.1109/TSP.2008.2010598 [22] Galleani, Lorenzo. A tutorial on the two-state model of the atomic clock noise. Metrologia, 2008, 45(6): S175-S182. doi: 10.1088/0026-1394/45/6/S23 [23] Kulpinski R J. Minimum variance methods for synchronization of airborne clocks. In: Proceedings of the 30th Annual Symposium on Frequency Control. IEEE, 1976. 401−413 [24] Lévesque M, Tipper D. A survey of clock synchronization over packet-switched networks. IEEE Communications Surveys & Tutorials, 2016, 18(4): 2926-2947 [25] Silvester J R. Determinants of Block Matrices. Mathematical Gazette, 2000, 84(501): 460-467 doi: 10.2307/3620776 [26] Schriegel S, Jasperneite J. Investigation of industrial environmental influences on clock sources and their effect on the synchronization accuracy of IEEE 1588. In: Proceedings of the IEEE International Symposium on Precision Clock Synchronization for Measurement. IEEE, 2007. 50−55 -

 下载:
下载:





计量
- 文章访问数: 984
- HTML全文浏览量: 607
- PDF下载量: 242
- 被引次数: 0
