

Uncertainty Characterization of Power Grid Net Load of Dirichlet Process Mixture Model Based on Relevant Data
-
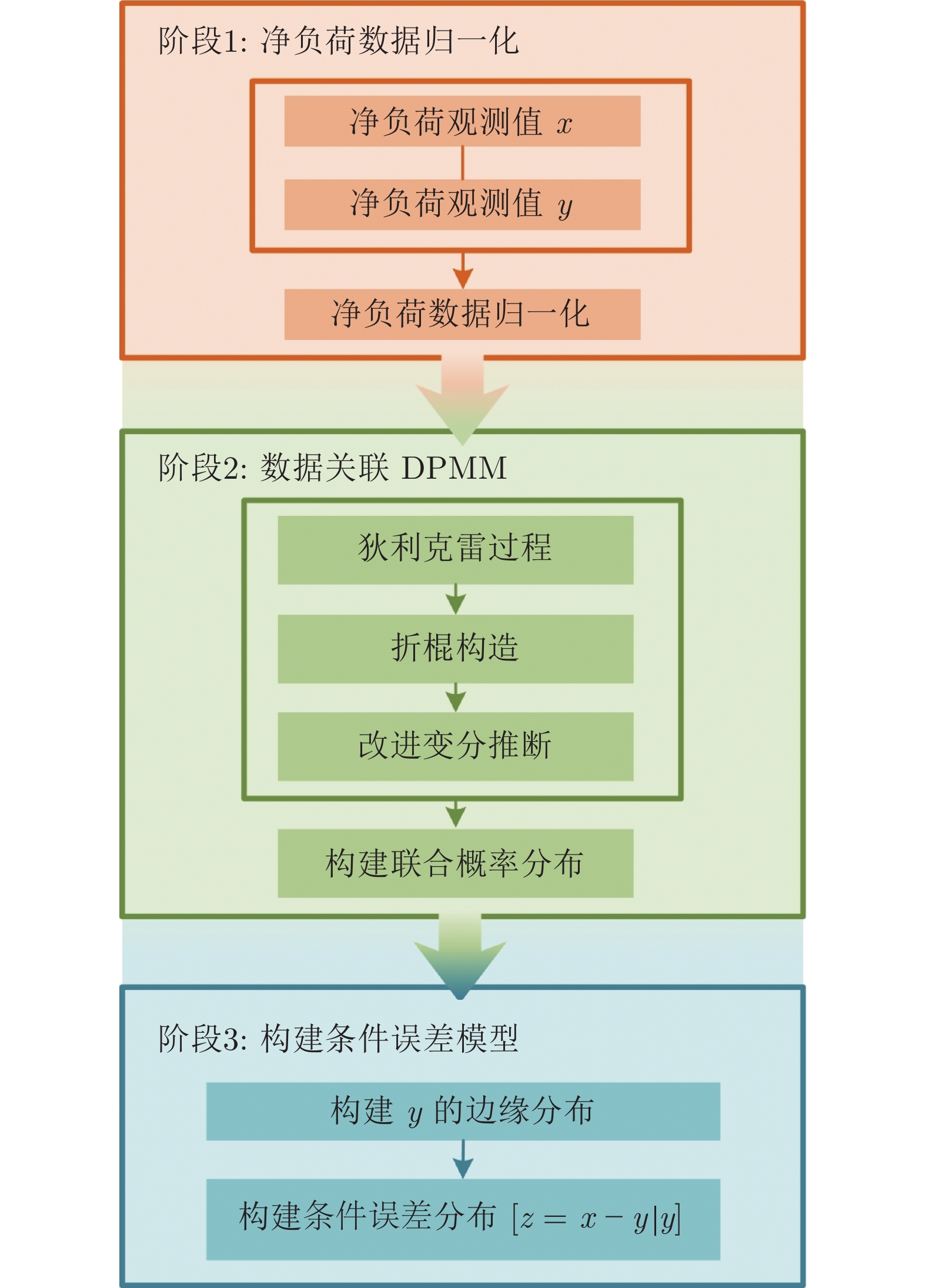
摘要: 针对电网净负荷时序数据关联的特点, 提出基于数据关联的狄利克雷混合模型 (Data-relevance Dirichlet process mixture model, DDPMM)来表征净负荷的不确定性. 首先, 使用狄利克雷混合模型对净负荷的观测数据与预测数据进行拟合, 得到其混合概率模型; 然后, 提出考虑数据关联的变分贝叶斯推断方法, 改进后验分布对该混合概率模型进行求解, 从而得到混合模型的最优参数; 最后, 根据净负荷预测值的大小得到其对应的预测误差边缘概率分布, 实现不确定性表征. 本文基于比利时电网的净负荷数据进行检验, 算例结果表明: 与传统的狄利克雷混合模型和高斯混合模型 (Gaussian mixture model, GMM)等方法相比, 所提出的基于数据关联狄利克雷混合模型可以更为有效地表征净负荷的不确定性.Abstract: Considering the time sequence correlation of the net load in power grids, this paper proposes a non-parametric Bayesian framework based on the data-relevance Dirichlet process mixture model (DDPMM). First, the Dirichlet process mixture model is used to fit the observation data and the forecast data of net load, in order to obtain a joint mixed probability model. Then, we propose a modified variational Bayesian inference that considers the correlation of the time sequence to acquire optimal parameters of the mixture model. Afterwards, we obtain the corresponding net load forecast error probabilistic distribution according to different net load forecast values. Finally, this paper uses actual data from the Belgian power grid for verification. Compared with the traditional Dirichlet process mixture model and Gaussian mixture model (GMM), our proposed approach takes into account the correlation of time series. Therefore, it can better characterize the forecast error of the net load, and obtain the optimal number of component clusters that would capture the uncertainty of the net load with more efficiency.
-
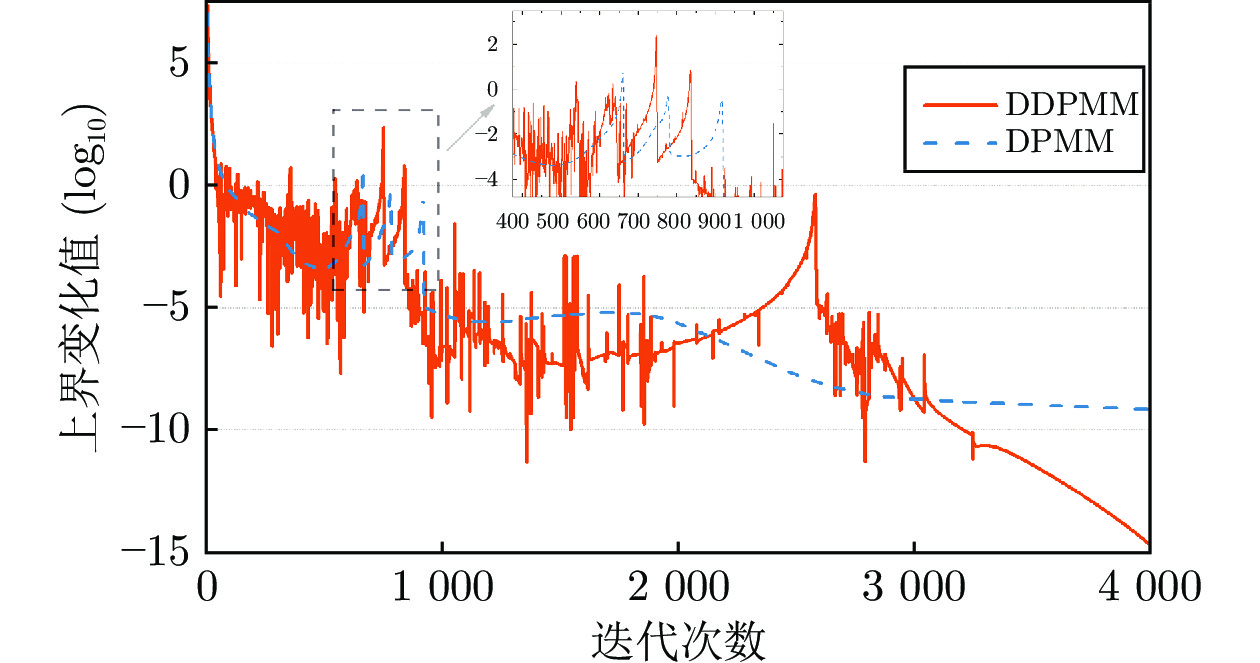
图 10 基于2019年净负荷数据的DDPMM与DPMM迭代曲线
Fig. 10 DDPMM and DPMM iterative curves based on net load data in the year of 2019

图 11 不同预测值下的净负荷预测误差条件概率分布
Fig. 11 The PDF of net load forecast error conditions under different forecast values
表 1 对数似然比较
Table 1 Comparison of log-likelihood
模型 Log-L/103 (test) DDPMM (5) 1.639 DPMM (15) 1.625 GMM-AIC (20) 1.612 GMM-BIC (13) 1.611  下载: 导出CSV
下载: 导出CSV
表 2 卡方拟合优度比较
Table 2 Comparison of goodness of fit of Chi-square
Test (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) DDPMM 4.36 3.03 3.58 1.63 1.54 1.96 1.59 1.96 5.32 5.11 DPMM 4.87 3.15 4.46 2.46 1.37 1.79 1.98 1.31 4.92 7.08 GMM-AIC 5.32 3.54 4.20 2.87 2.01 2.01 2.42 1.95 5.94 5.58 GMM-BIC 5.64 3.46 3.95 2.63 2.34 2.53 2.07 2.84 4.99 5.98
下载: 导出CSV
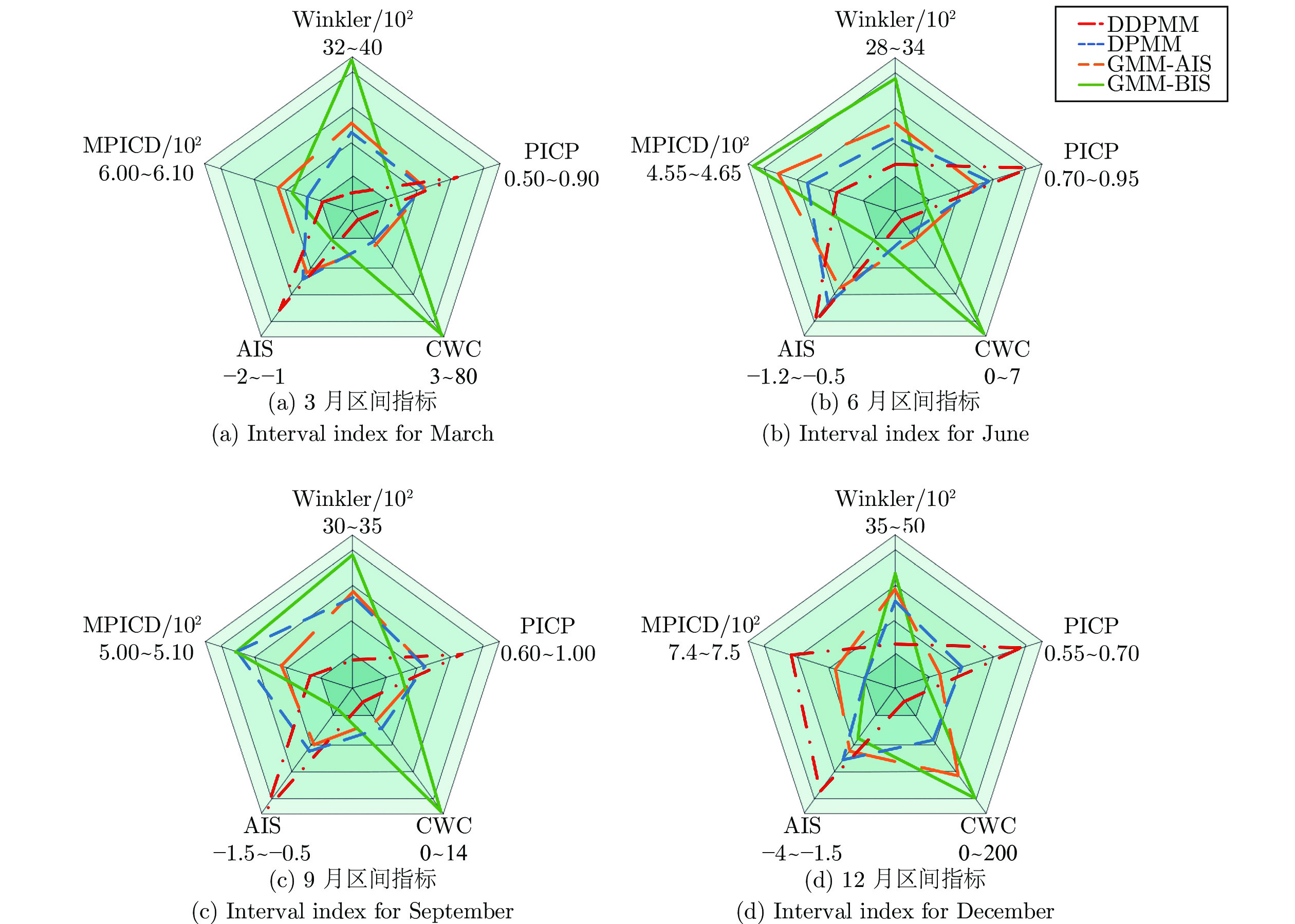
表 3 0.95置信度下2020年3月区间指标
Table 3 Interval index for March 2020 with 0.95 confidence level
模型 Winkler/102 PICP CWC AIS MPICD/102 DDPMM 33.57 0.80 4.14 −1.03 6.03 DPMM 37.18 0.70 22.58 −1.56 6.05 GMM-AIC 39.11 0.63 78.71 −1.84 6.07 GMM-BIC 36.86 0.69 26.93 −1.51 6.08
下载: 导出CSV
表 4 0.95置信度下2020年6月区间指标
Table 4 Interval index for June 2020 with 0.95 confidence level
模型 Winkler/102 PICP CWC AIS MPICD/102 DDPMM 29.84 0.93 0.50 −0.58 4.59 DPMM 30.91 0.86 1.18 −0.68 4.61 GMM-AIC 33.19 0.75 6.68 −1.02 4.65 GMM-BIC 31.46 0.84 1.56 −0.77 4.63
下载: 导出CSV
表 5 0.95置信度下2020年9月区间指标
Table 5 Interval index for September 2020 with 0.95 confidence level
模型 Winkler/102 PICP CWC AIS MPICD/102 DDPMM 30.60 0.89 0.93 −0.70 5.02 DPMM 32.59 0.80 3.71 −0.96 5.03 GMM-AIC 34.90 0.72 13.76 −1.32 5.03 GMM-BIC 32.85 0.79 3.68 −1.01 5.02
下载: 导出CSV
表 6 0.95置信度下2020年12月区间指标
Table 6 Interval index for December 2020 with 0.95 confidence level
模型 Winkler/102 PICP CWC AIS MPICD/102 DDPMM 39.18 0.72 20.4 −1.97 7.45 DPMM 44.51 0.61 138.23 −2.77 7.44 GMM-AIC 46.02 0.59 173.46 −3.00 7.42 GMM-BIC 43.31 0.64 82.32 −2.59 7.42
下载: 导出CSV
表 7 0.8置信度下2020年6月区间指标
Table 7 Interval index for June 2020 with 0.8 confidence
模型 Winkler/102 PICP CWC AIS DDPMM 32.76 0.77 0.41 −0.91 DPMM 34.70 0.68 1.34 −1.20 GMM-AIC 37.53 0.56 9.86 −1.66 GMM-BIC 35.41 0.66 1.90 −0.32
下载: 导出CSV
表 8 0.5置信度下2020年6月区间指标
Table 8 Interval index for June 2020 with 0.5 confidence
模型 Winkler/102 PICP CWC AIS DDPMM 39.84 0.49 0.16 −1.93 DPMM 41.73 0.38 0.73 −2.30 GMM-AIC 44.26 0.31 2.19 −2.73 GMM-BIC 42.33 0.38 0.66 −2.40
下载: 导出CSV
-
[1] 黄博南, 王勇, 李玉帅, 刘鑫蕊, 杨超. 基于分布式神经动态优化的综合能源系统多目标优化调度. 自动化学报, DOI: 10.16383/j.aas.c200168Huang Bo-Nan, Wang Yong, Li Yu-Shuai, Liu Xin-Rui, Yang Chao. Multi-objective optimal scheduling of integrated energy systems based on distributed neurodynamic optimization. Acta Automatica Sinica, DOI: 10.16383/j.aas.c200168 [2] 唐昊, 刘畅, 杨明, 汤必强, 许丹, 吕凯. 考虑电网调峰需求的工业园区主动配电系统调度学习优化. 自动化学报, 2019, 47(10): 1-15Tang Hao, Liu Chang, Yang Ming, Tang Bi-Qiang, Xu Dan, Lv Kai. Learning-based optimization of active distribution system dispatch in industrial park considering the peak operation demand of power grid. Acta Automatica Sinica, 2021, 47(10): 2449-2463 [3] 姜兆宇, 贾庆山, 管晓宏. 多时空尺度的风力发电预测方法综述. 自动化学报, 2019, 45(1): 51-71Jiang Zhao-Yu, Jia Qing-Shan, Guan Xiao-Hong. A Review of Multi-temporal-and-spatial-scale Wind Power Forecasting Method. Acta Automatica Sinica, 2019, 45(1): 51-71 [4] Sun M, Zhang T, Wang Y, Strbac G and Kang C. Using Bayesian deep learning to capture uncertainty for residential net load forecasting. IEEE Transactions on Power Systems, 2019, 35(1): 188-20 [5] Wang Y, Zhang N, Chen Q, Kirschen D S, Li P, Xia Q. Data-driven probabilistic net load forecasting with high penetration of behind-the-meter PV. IEEE Transactions on Power Systems, 2017, 33(3): 3255-3264 [6] Rajbhandari N, Li W F, Du P W, Sharma S, Blevins B. Analysis of net-load forecast error and new methodology to determine non-spin reserve service requirement. In: Proceedings of the 2016 IEEE Power and Energy Society General Meeting, Boston, MA, USA: IEEE, 2016: 1−5 [7] Alvarado-Barrios L, Alvaro R, Valerino B, et al. Stochastic unit commitment in microgrids: Influence of the load forecasting error and the availability of energy storage. Renewable Energy, 2020, 146: 2060-2069 doi: 10.1016/j.renene.2019.08.032 [8] Tang C, Jian X, Sun Y, et al. A versatile mixture distribution and its application in economic dispatch with multiple wind farms. IEEE Transactions on Sustainable Energy, 2017, 8(4): 1747-1762 doi: 10.1109/TSTE.2017.2709755 [9] Dong B, Li Z, Rahman S M M, et al. A hybrid model approach for forecasting future residential electricity consumption. Energy and Buildings, 2016, 117: 341-351 doi: 10.1016/j.enbuild.2015.09.033 [10] 赵书强, 张婷婷, 李志伟, 等. 基于数值特性聚类的日前光伏出力预测误差分布模型. 电力系统自动化, 2019, 43(13): 36-45 doi: 10.7500/AEPS20180405002Zhao Shu-qiang, Zhang Ting-ting, Li Zhi-wei, et al. Distribution Model of Day-ahead Photovoltaic Power Forecasting Error Based on Numerical Characteristic Clustering. Automation of Electric Power Systems, 2019, 43(13): 36-45 doi: 10.7500/AEPS20180405002 [11] Yang Y, Wu W, Wang B, Li M. Analytical Reformulation for Stochastic Unit Commitment Considering Wind Power Uncertainty With Gaussian Mixture Model. IEEE Transactions on Power Systems, 2020, 35(4): 2769-2782 doi: 10.1109/TPWRS.2019.2960389 [12] Sun W, Zamani M, Hesamzadeh M R, Zhang H. Data-Driven Probabilistic Optimal Power Flow with Nonparametric Bayesian Modeling and Inference. IEEE Transactions on Smart Grid, 2020, 11(2): 1077-1090 doi: 10.1109/TSG.2019.2931160 [13] Brockwell P J, Davis R A, Berger J O, Fienberg S E, Singer B. Time Series: Theory and Methods. Berlin: Springer-Verlag, 2015. 48−59 [14] Kun Il Park. Fundamentals of Probability and Stochastic Processes with Applications to Communications, Berlin: Springer, 2018. 171−183 [15] Han L, Jing H, Zhang R, et al. Wind power forecast based on improved Long Short-Term Memory network. Energy, 2019: 116300 [16] Blei D M, Jordan M I. Variational inference for Dirichlet process mixtures. Bayesian Analysis, 2006, 1(1): 121-143 [17] Li Z, Li Y, Liu Y, Wang P, Lu R, Gooi H B. Deep Learning Based Densely Connected Network for Load Forecasting. IEEE Transactions on Power Systems, 2021, 36(4): 2829-2840 doi: 10.1109/TPWRS.2020.3048359 [18] McLachlan G J, Peel D. Finite Mixture Models. Wiley Series in Probability and Statistics. John Wiley & Sons Inc. 2000, 521−541 [19] Bishop C M. Pattern Recognition and Machine Learning. Journal of Electronic Imaging, 2006, 16(4): 140-155 [20] Bouguila N, Ziou D. A Dirichlet Process Mixture of Generalized Dirichlet Distributions for Proportional Data Modeling. IEEE Transactions on Neural Networks, 2010, 21(1): 107-122 doi: 10.1109/TNN.2009.2034851 [21] Sethuraman J. A Constructive Definition of the Dirichlet Prior. Statistica Sinica, 1994, 4(2): 639-650 [22] Dong H, Dwk B, Csp C. Prior selection method using likelihood confidence region and Dirichlet process Gaussian mixture model for Bayesian inference of building energy models. Energy and Buildings, 2020, 224: 110293 doi: 10.1016/j.enbuild.2020.110293 [23] Akaike H. A new look at the statistical model identification. IEEE Transactions on Automatic Control, 1976, 19(6): 716-723 [24] Wang Y, Liu Q. Comparison of Akaike information criterion and Bayesian information criterion in selection of stock–recruitment relationships. Fisheries Research, 2006, 77(2): 220-225 doi: 10.1016/j.fishres.2005.08.011 [25] Khosravi A, Nahavandi S, Creighton D, et al. Lower Upper Bound Estimation Method for Construction of Neural Network-Based Prediction Intervals. IEEE Transactions on Neural Networks, 2011, 22(3): 337-346 doi: 10.1109/TNN.2010.2096824 -

 下载:
下载:




计量
- 文章访问数: 1037
- HTML全文浏览量: 655
- PDF下载量: 189
- 被引次数: 0
