

Perspectives on Performance Evaluation Method for Inertial Integrated Navigation System
-
摘要: 性能评估方法能够解决试验法无法评估定性指标, 以及试验难以开展时无法评估性能的问题, 已成为支撑各类军民装备现代化的重要技术手段. 然而, 性能评估方法的指标体系, 无量纲化方法及权重方法均存在不足, 难以满足精确性的要求. 对于指标具有模糊性和不可公度性, 且包含多个指标, 指标间具有多层次关系的系统而言, 例如, 惯性组合导航系统, 性能评估方法精确性尤为重要. 本文梳理了惯性组合导航系统性能评估方法研究进展. 首先, 介绍了惯性组合导航系统性能评估方法概述, 包括性能评估方法概念分析, 惯性组合导航系统特殊性讨论及惯性组合导航系统与性能评估方法关系分析. 其次, 分析了惯性组合导航系统指标体系, 无量纲化方法, 组合权重方法及评估方法等内容. 最后, 阐述惯性组合导航系统性能评估方法存在的问题及未来研究方向.Abstract: The performance evaluation method can solve the problem that test methods cannot evaluate qualitative indexes, and cannot evaluate performance when the test is difficult to carry out, and has become an important technical means to support the modernization of various military and civilian equipments. However, three parts of performance evaluation method are insufficient to meet the accuracy requirements, which are the index system, the dimensionless method and the weight method. The accuracy of performance evaluation method is particularly important to the system with those characteristics, where the indexes are fuzzy and incommensurable, multiple indexes and multi-level relationship between indexes, for example, inertial integrated navigation system. This paper reviews the perspectives on performance evaluation methods of inertial integrated navigation system. Firstly, the survey of the performance evaluation methods of inertial integrated navigation system is introduced, including the analysis of the concept of performance evaluation method, the discussion of the particularity of inertial integrated navigation system and the analysis of the relationship between inertial integrated navigation system and performance evaluation method. Secondly, the index system of inertial integrated navigation system, the dimensionless method, combination weight method and evaluation method are analyzed. Finally, the problems and the future research directions of performance evaluation methods for inertial integrated navigation system are discussed.
-
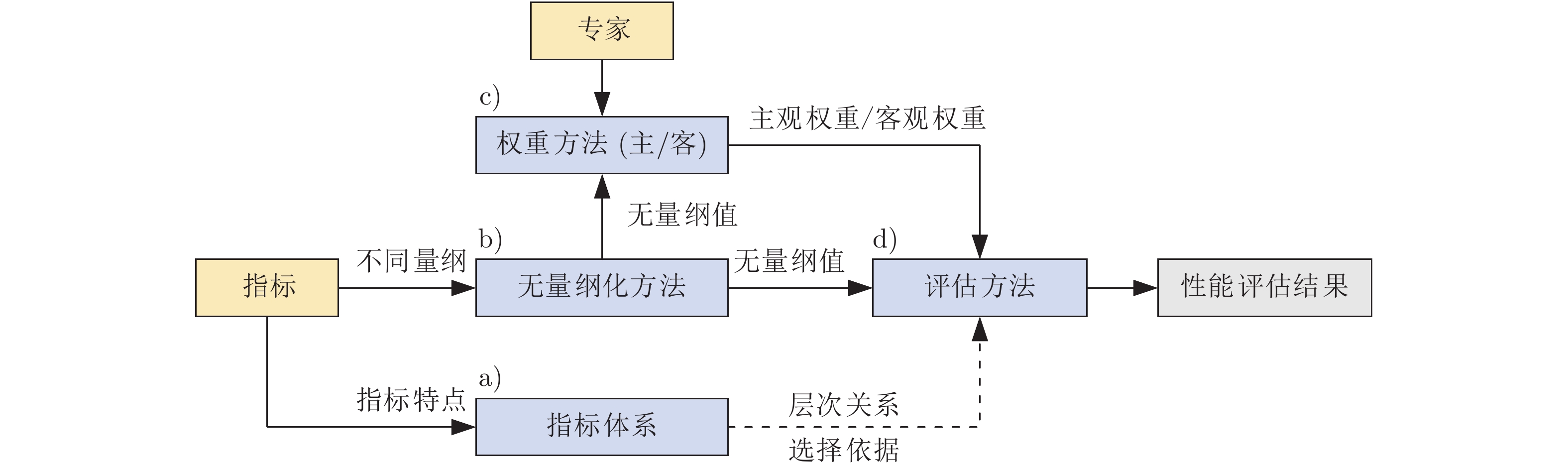
图 2 性能评估方法各部分内容关系
Fig. 2 The relationship of each part of performance evaluation method
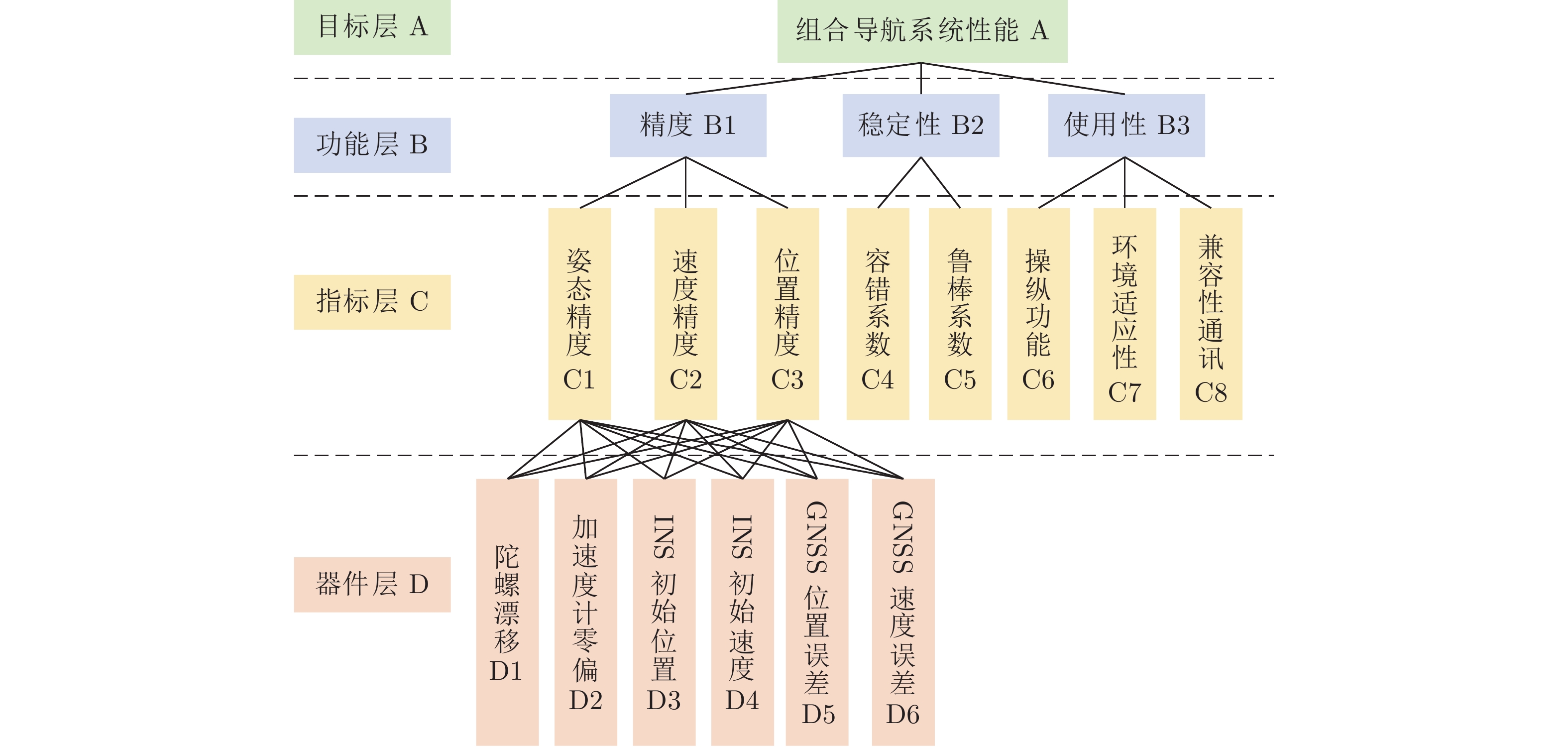
图 3 INS/GNSS组合导航系统指标体系
Fig. 3 The index system of INS/GNSS integrated navigation system
表 1 4种方法对比
Table 1 Comparison of four methods
方法 优点 缺点 解析分析法 计算量小 通用性差 蒙特卡洛实验法 通用性强 将确定问题转化为随机问题 半实物仿真法 比数据仿真法更接近于实际 无法模拟复杂工况 试验验证法 客观, 全面 成本高, 存在无法开展试验的情况  下载: 导出CSV
下载: 导出CSV
表 4 三种智能算法对比
Table 4 Comparison of three intelligent algorithms
智能算法 特点 优缺点 MOEA/D 将多目标优化问题转化为标量单目标问题 具有快速性, 对于复杂优化问题, 需要提高算法性能 改进 PSO 直接求解多目标优化模型 存在收敛性差的问题, 收敛时间长 改进 MOEA/D-DE 在 MOEA/D 基础上, 引入 DE 算法提高搜索性能 算法性能比 MOEA/D 好, 适用于具有复杂 PF 的优化问题
下载: 导出CSV
表 5 组合权重三种求解方法对比
Table 5 Comparison of three solving methods of combined weight
方法 特点 研究方向 直接法 求解精度低, 适用于简单问题 提高求解精度 拉格朗日函数法 比直接法精度高, 无法适用于复杂优化问题 提高加权系数求解精度 智能算法 适用于具有非线性和包含等式约束特点的复杂优化问题 提高算法性能
下载: 导出CSV
-
[1] 王巍. 惯性技术研究现状及发展趋势. 自动化学报, 2013, 39(6): 723-729Wang Wei. Status and development trend of inertial technology. Acta Automatica Sinica, 2013, 39(6): 723-729 [2] 高社生, 何鹏举, 杨波, 魏文辉. 组合导航原理及应用. 西安: 西北工业大学出版社, 2012. 51, 53, 59Gao She-Sheng, He Peng-Ju, Yang Bo, Wei Wen-Hui. Principle and Application of Integrated Navigation. Xi'an: Northwestern Polytechnical University Press, 2012. 51, 53, 59 [3] Zhong M Y, Guo J, Yang Z H. On real time performance evaluation of the inertial sensors for INS/GPS integrated systems. IEEE Sensors Journal, 2016, 16(17): 6652-6661 doi: 10.1109/JSEN.2016.2588140 [4] Gautier J D. GPS/INS Generalized Evaluation Tool (GIGET) for the Design and Testing of Integrated Navigation Systems [Ph.D. dissertation], Stanford University, USA, 2003. [5] Wang D, Xu X S, Yao Y Q, Zhang T, Zhu Y Y. A novel SINS/DVL tightly integrated navigation method for complex environment. IEEE Transactions on Instrumentation and Measurement, 2020, 69(7): 5183-5196 doi: 10.1109/TIM.2019.2955187 [6] Wang Y, Li Y, Liu W, Gao Y B. Assessing operational ocean observing equipment (OOOE) based on the fuzzy comprehensive evaluation method. Ocean Engineering, 2015, 107: 54-59 doi: 10.1016/j.oceaneng.2015.07.032 [7] Liu Y H, Fang P P, Bian D D, Zhang H W, Wang S X. Fuzzy comprehensive evaluation for the motion performance of autonomous underwater vehicles. Ocean Engineering, 2014, 88: 568-577 doi: 10.1016/j.oceaneng.2014.03.013 [8] Zhao L, Kang Y Y, Cheng J H, Wu M Y. A fault-tolerant polar grid SINS/DVL/USBL integrated navigation algorithm based on the centralized filter and relative position measurement. Sensors, 2019, 19(18): Article No. 3899 doi: 10.3390/s19183899 [9] 孙金龙. 极地地区组合导航自适应多源信息融合方法研究 [博士学位论文], 哈尔滨工业大学, 中国, 2018.Sun Jin-Long. Research on Adaptive Multi-Source Information Fusion Methods for Polar Integrated Navigation [Ph.D. dissertation], Harbin Institute of Technology, China, 2018. [10] Cheng J H, Dong M T, Qi B. An OW-FCE model based on MDE algorithm for evaluating integrated navigation system. IEEE Access, 2019, 7: 178918-178929 doi: 10.1109/ACCESS.2019.2957522 [11] 殷春武. 无人飞行器航迹方案的VIKOR择优评价. 控制与决策, 2020, 35(12): 2950-2958Yin Chun-Wu. Unmanned aerial vehicle path scheme optimal evaluation based-VIKOR. Control and Decision, 2020, 35(12): 2950-2958 [12] Golec A, Kahya E. A fuzzy model for competency-based employee evaluation and selection. Computers & Industrial Engineering, 2007, 52(1): 143-161 [13] 刘剑锋. 城市基础设施水平综合评价的理论和方法研究 [博士学位论文], 清华大学, 中国, 2007.Liu Jian-Feng. Research on Comprehensive Evaluation Theory and Methods of Urban Infrastructure Service Level [Ph.D. dissertation], Tsinghua University, China, 2007. [14] 苏为华. 多指标综合评价理论与方法研究. 北京: 中国物价出版社, 2001. 6−7Su Wei-Hua. The Research on the Theory and Method of Multi Index Comprehensive Evaluation. Beijing: China Prices Press, 2001. 6−7 [15] 毛艳慧. 信息融合中估计算法的性能评估. 北京: 电子工业出版社, 2019. 5−6Mao Yan-Hui. Performance Evaluation of Estimation Algorithms in Information Fusion. Beijing: Publishing House of Electronics Industry, 2019. 5−6 [16] 马亚龙, 邵秋峰, 孙明, 黄俊卿, 盛卫超. 评估理论和方法及其军事应用. 北京: 国防工业出版社, 2013. 1−10Ma Ya-Long, Shao Qiu-Feng, Sun Ming, Huang Jun-Qing, Sheng Wei-Chao. Evaluation Theory and Method and Its Military Application. Beijing: National Defense Industry Press, 2013. 1−10 [17] 徐吉辉, 谢文俊. 综合评价理论、方法与军事应用. 北京: 国防工业出版社, 2014. 1−20Xu Ji-Hui, Xie Wen-Jun. Theory, Method and Military Application of Comprehensive Evaluation. Beijing: National Defense Industry Press, 2014. 1−20 [18] 杨保安, 张科静. 多目标决策分析: 理论、方法与应用研究. 上海: 东华大学出版社, 2008. 1, 6, 8, 14Yang Bao-An, Zhang Ke-Jing. Research on Theory, Method and Application of Multi Objective Decision Analysis. Shanghai: Donghua University Press, 2008. 1, 6, 8, 14 [19] 侯定丕, 王战军. 非线性评估的理论探索与应用. 合肥: 中国科学技术大学出版社, 2001. 1−2Hou Ding-Pi, Wang Zhan-Jun. Theoretical Exploration and Application of Nonlinear Evaluation. Hefei: China University of Science and Technology Press, 2001. 1−2 [20] 魏世孝, 周献中. 多属性决策理论方法及其在C.3I系统中的应用. 北京: 国防工业出版社, 1998. 9−10Wei Shi-Xiao, Zhou Xian-Zhong. Multi Attribute Decision Making Theory and Its Application in C.3I System. Beijing: National Defense Industry Press, 1998. 9−10 [21] 王胜标. 一种组合导航系统性能评估实验平台的研发 [硕士学位论文], 上海交通大学, 中国, 2007.Wang Sheng-Biao. The Development of an Experiment Platform for Evaluating the Integrated Navigation System [Master thesis], Shanghai Jiao Tong University, China, 2007. [22] Godha S. Performance Evaluation of Low Cost MEMS-based IMU Integrated with GPS for Land Vehicle Navigation Application [Master thesis], University of Calgary, Canada, 2006. [23] 徐昌文. 模糊数学在船舶工程中的应用. 北京: 国防工业出版社, 1992. 1−2, 10Xu Chang-Wen. Application of Fuzzy Mathematics in Ship Engineering. Beijing: National Defense Industry Press, 1992. 1−2, 10 [24] 王熙照, 翟俊海. 基于不确定性的决策树归纳. 北京: 科学出版社, 2012. 1Wang Xi-Zhao, Zhai Jun-Hai. Decision Tree Induction Based on Uncertainty. Beijing: Science Press, 2012. 1 [25] 彭张林. 综合评价过程中的相关问题及方法研究 [博士学位论文], 合肥工业大学, 中国, 2015.Peng Zhang-Lin. Research on Some Specific Problems and the Solution Methods of Comprehensive Evaluation [Ph.D. dissertation], Hefei University of Technology, China, 2015. [26] Khaleghi B, Khamis A, Karray F O, Razavi S N. Multisensor data fusion: A review of the state-of-the-art. Information Fusion, 2013, 14(1): 28-44 doi: 10.1016/j.inffus.2011.08.001 [27] Hu G G, Gao S S, Zhong Y M, Gao B B, Subic A. Matrix weighted multisensor data fusion for INS/GNSS/CNS integration. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2016, 230(6): 1011-1026 doi: 10.1177/0954410015602723 [28] Grewal M S, Andrews A P, Bartone C G. Global Navigation Satellite Systems, Inertial Navigation, and Integration (4th Edition). Bartone: John Wiley & Sons, 2020. [29] Wang X L, Wang X, Zhu J F, Li F, Li Q S, Che H. A hybrid fuzzy method for performance evaluation of fusion algorithms for integrated navigation system. Aerospace Science and Technology, 2017, 69: 226-235 doi: 10.1016/j.ast.2017.06.027 [30] 徐博, 陈春, 陶冠时, 易楚伟. 基于AHP的捷联惯导系统模糊综合评价. 火力与指挥控制, 2013, 38(11): 40-43, 48 doi: 10.3969/j.issn.1002-0640.2013.11.010Xu Bo, Chen Chun, Tao Guan-Shi, Yi Chu-Wei. Fuzzy synthetic assessment of strapdown inertial navigation system based on AHP. Fire Control & Command Control, 2013, 38(11): 40-43, 48 doi: 10.3969/j.issn.1002-0640.2013.11.010 [31] 李军伟, 程咏梅, 陈克喆. 基于三级多源信息融合结构的SINS性能测试综合评估算法. 中国惯性技术学报, 2014, 22(2): 177-184Li Jun-Wei, Cheng Yong-Mei, Chen Ke-Zhe. Comprehensive evaluation algorithm of SINS performance testing based on three-level multi-source information fusion structure. Journal of Chinese Inertial Technology, 2014, 22(2): 177-184 [32] 杨军. 基于模糊理论的卫星导航系统综合效能评估研究. 宇航学报, 2004, 25(2): 147-151, 194 doi: 10.3321/j.issn:1000-1328.2004.02.006Yang Jun. Study on the synthetic effectiveness evaluation of satellite navigation system based on the fuzzy theory. Journal of Astronautics, 2004, 25(2): 147-151, 194 doi: 10.3321/j.issn:1000-1328.2004.02.006 [33] 安雪滢, 赵勇, 杨乐平, 张为华. 基于模糊理论的卫星系统效能评估仿真研究. 系统仿真学报, 2006, 18(8): 2334-2337 doi: 10.3969/j.issn.1004-731X.2006.08.070An Xue-Ying, Zhao Yong, Yang Le-Ping, Zhang Wei-Hua. Simulation of effectiveness evaluation for satellite systems based on fuzzy theory. Journal of System Simulation, 2006, 18(8): 2334-2337 doi: 10.3969/j.issn.1004-731X.2006.08.070 [34] 项磊, 杨新, 张扬, 余晓刚. 基于层次分析法与模糊理论的卫星效能评估. 计算机仿真, 2013, 30(2): 55-61 doi: 10.3969/j.issn.1006-9348.2013.02.014Xiang Lei, Yang Xin, Zhang Yang, Yu Xiao-Gang. Effectiveness evaluation for satellite system based on analytic hierarchy process and fuzzy theory. Computer Simulation, 2013, 30(2): 55-61 doi: 10.3969/j.issn.1006-9348.2013.02.014 [35] 唐鹏. 测速测角组合自主导航性能评估研究 [硕士学位论文], 电子科技大学, 中国, 2016.Tang Peng. A Research on the Performance Evaluation of Autonomous Navigation System [Master thesis], University of Electronic Science and Technology of China, China, 2016. [36] 张薇. 深空探测测速测角组合导航性能评估平台的设计与实现 [硕士学位论文], 电子科技大学, 中国, 2019.Zhang Wei. Design and Implementation of a Performance Evaluation Platform for Deep Space Detection Integrated Navigation System [Master thesis], University of Electronic Science and Technology of China, China, 2019. [37] 程进伟, 李建勋. 卡尔曼滤波算法评估平台的设计与实现. 系统仿真学报, 2013, 25(11): 2567-2574Cheng Jin-Wei, Li Jian-Xun. Design and implementation of software platform to evaluate Kalman filter algorithm. Journal of System Simulation, 2013, 25(11): 2567-2574 [38] 赵欣, 王跃钢, 王仕成, 张金生, 杨述华. 一种组合导航信息融合算法品质评估方法. 中国惯性技术学报, 2012, 20(2): 211-219 doi: 10.3969/j.issn.1005-6734.2012.02.018Zhao Xin, Wang Yue-Gang, Wang Shi-Cheng, Zhang Jin-Sheng, Yang Shu-Hua. Quality evaluating method of integrated navigation information fusion algorithm. Journal of Chinese Inertial Technology, 2012, 20(2): 211-219 doi: 10.3969/j.issn.1005-6734.2012.02.018 [39] 张志强. 组合导航系统性能评估方法的研究 [硕士学位论文], 哈尔滨工程大学, 中国, 2014.Zhang Zhi-Qiang. Research on the Performance Evaluation Method of the Integrated Navigation System [Master thesis], Harbin Engineering University, China, 2014. [40] 陈晶, 董铭涛, 程建华. 层次分析的惯导/重力匹配导航系统性能评估方法. 传感器与微系统, 2016, 35(9): 23-26Chen Jing, Dong Ming-Tao, Cheng Jian-Hua. Approach for performance evaluation of AHP-based INS/gravity matching navigation system. Transducer and Microsystem Technologies, 2016, 35(9): 23-26 [41] 翟峻仪. GNSS/INS组合导航系统性能评估技术研究 [硕士学位论文], 北京理工大学, 中国, 2015.Zhai Jun-Yi. Research on Technique of Performance Evaluation for GNSS/INS Integrated Navigation System [Master thesis], Beijing Institute of Technology, China, 2015. [42] 朱孔来. 评价指标的非线性无量纲模糊处理方法. 系统工程, 1996, 14(6): 58-62Zhu Kong-Lai. Nonlinear dimensionless fuzzy handling of evaluation indexes. Systems Engineering, 1996, 14(6): 58-62 [43] 夏高见. 结构状态综合评估方法研究及软件平台开发 [硕士学位论文], 哈尔滨工业大学, 中国, 2009.Xia Gao-Jian. Study on Synthesis Assessment Method for Condition of Structures and Software Development [Master thesis], Harbin Institute of Technology, China, 2009. [44] Xiong J B, Zhang Q H, Wan J F, Liang L, Cheng P H, Liang Q. Data fusion method based on mutual dimensionless. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 506-517 doi: 10.1109/TMECH.2017.2759791 [45] Duan Q, Liu B S, Wu F, Kang J. Selection of dimensionless methods in the back-to-back brand valuation. In: Proceedings of the 2018 International Conference on Robots and Intelligent System (ICRIS). Changsha, China: IEEE, 2018. 577−581 [46] Li Y L, Han K X, Wu J W. The applicability analysis and improvement of several index dimensionless methods. In: Proceedings of the 13th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery. Guilin, China: IEEE, 2017. 3084−3088 [47] 糜万俊. 无量纲化对属性权重影响的传导机制及调权研究. 统计与决策, 2013(4): 11-14Mi Wan-Jun. Research on the transmission mechanism and adjustment of dimensionless influence on attribute weight. Statistics & Decision, 2013(4): 11-14 [48] 江文奇. 无量纲化方法对属性权重影响的敏感性和方案保序性. 系统工程与电子技术, 2012, 34(12): 2520-2523 doi: 10.3969/j.issn.1001-506X.2012.12.20Jiang Wen-Qi. Sensibility and alternative COP analysis of dimensionless methods on effect of attribute weight. Systems Engineering and Electronics, 2012, 34(12): 2520-2523 doi: 10.3969/j.issn.1001-506X.2012.12.20 [49] 高晓红, 李兴奇. 主成分分析中线性无量纲化方法的比较研究. 统计与决策, 2020, 36(3): 33-36Gao Xiao-Hong, Li Xing-Qi. Comparative study on linear dimensionless methods in principal component analysis. Statistics and Decision, 2020, 36(3): 33-36 [50] Lai C G, Chen X H, Chen X Y, Wang Z L, Wu X S, Zhao S W. A fuzzy comprehensive evaluation model for flood risk based on the combination weight of game theory. Natural Hazards, 2015, 77(2): 1243-1259 doi: 10.1007/s11069-015-1645-6 [51] Zhu X C, Niu D P, Wang X, Wang F L, Jia M X. Comprehensive energy saving evaluation of circulating cooling water system based on combination weighting method. Applied Thermal Engineering, 2019, 157: Article No. 113735 doi: 10.1016/j.applthermaleng.2019.113735 [52] Dai S Y, Niu D X. Comprehensive evaluation of the sustainable development of power grid enterprises based on the model of fuzzy group ideal point method and combination weighting method with improved group order relation method and entropy weight method. Sustainability, 2017, 9(10): Article No. 1900 doi: 10.3390/su9101900 [53] 汪泽焱, 顾红芳, 益晓新, 张申如. 一种基于熵的线性组合赋权法. 系统工程理论与实践, 2003 23(3): 112-116 doi: 10.3321/j.issn:1000-6788.2003.03.020Wang Ze-Yan, Gu Hong-Fang, Yi Xiao-Xin, Zhang Shen-Ru. A method of determining the linear combination weights based on entropy. Systems Engineering-Theory & Practice, 2003 23(3): 112-116 doi: 10.3321/j.issn:1000-6788.2003.03.020 [54] 赵福均, 周志杰, 胡昌华, 常雷雷, 王力. 基于证据推理的动态系统安全性在线评估方法. 自动化学报, 2017, 43(11): 1950-1961Zhao Fu-Jun, Zhou Zhi-Jie, Hu Chang-Hua, Chang Lei-Lei, Wang Li. Online safety assessment method based on evidential reasoning for dynamic systems. Acta Automatica Sinica, 2017, 43(11): 1950-1961 [55] Ji B, Ye Y G, Xiao Y. A combination weighting algorithm using relative entropy for document clustering. International Journal of Pattern Recognition and Artificial Intelligence, 2014, 28(3): Article No. 1453002 doi: 10.1142/S0218001414530024 [56] 何华锋, 王依繁, 何耀民, 苏敬, 韩晓斐. 导弹武器系统时间同步网的综合性能评估方法. 航空学报, 2021, 42(6): Article No. 324564He Hua-Feng, Wang Yi-Fan, He Yao-Min, Su Jing, Han Xiao-Fei. Comprehensive performance evaluation method for time synchronization network of missile weapon system. Acta Aeronautica et Astronautica Sinica, 2021, 42(6): Article No. 324564 [57] 胡宇桑, 王大轶, 刘成瑞. 卫星姿控系统可重构性综合评价方法研究. 宇航学报, 2015, 36(5): 549-556 doi: 10.3873/j.issn.1000-1328.2015.05.009Hu Yu-Sang, Wang Da-Yi, Liu Cheng-Rui. Reconfigurability comprehensive evaluation for satellite attitude control system. Journal of Astronautics, 2015, 36(5): 549-556 doi: 10.3873/j.issn.1000-1328.2015.05.009 [58] 周依希, 李晓明, 瞿合祚. 基于反熵-AHP二次规划组合赋权法的电网节点综合脆弱性评估. 电力自动化设备, 2019, 39(7): 133-140Zhou Yi-Xi, Li Xiao-Ming, Qu He-Zuo. Node comprehensive vulnerability assessment of power grid based on anti-entropy-AHP quadratic programming combination weighting method. Electric Power Automation Equipment, 2019, 39(7): 133-140 [59] Zhou A M, Qu B Y, Li H, Zhao S Z, Suganthan P N, Zhang Q F. Multiobjective evolutionary algorithms: A survey of the state of the art. Swarm and Evolutionary Computation, 2011, 1(1): 32-49 doi: 10.1016/j.swevo.2011.03.001 [60] 程建华, 董铭涛, 赵琳. 一种基于MOEA/D的组合权重方法. 控制与决策, 2021, 36(12): 3056-3062Cheng Jian-Hua, Dong Ming-Tao, Zhao Lin. A combination weight method based on MOEA/D. Control and Decision, 2021, 36(12): 3056-3062 [61] 石莉, 杨善林, 马英, 杨颖. 一种新的组合权重集结方法及合理性评价研究. 系统工程学报, 2012, 27(4): 481-491 doi: 10.3969/j.issn.1000-5781.2012.04.008Shi Li, Yang Shan-Lin, Ma Ying, Yang Ying. A novel method of combination weighting for multiple attribute decision making. Journal of Systems Engineering, 2012, 27(4): 481-491 doi: 10.3969/j.issn.1000-5781.2012.04.008 [62] Dong M T, Cheng J H, Zhao L. A combination weighting model based on iMOEA/D-DE. Frontiers of Information Technology and Electronic Engineering, 2022, 23(4): 604−616 [63] Shi R J, Fan X C, He Y. Comprehensive evaluation index system for wind power utilization levels in wind farms in China. Renewable and Sustainable Energy Reviews, 2017, 69: 461-471 doi: 10.1016/j.rser.2016.11.168 [64] Cheng J H, Dong M T, Liu J X. Accuracy performance evaluation method of integrated navigation system based on two-level FCE. In: Proceedings of the 2019 Chinese Control Conference. Guangzhou, China: IEEE, 2019. 3869−3874 [65] 朱占龙. 惯性/地磁匹配组合导航相关技术研究 [博士学位论文], 东南大学, 中国, 2015.Zhu Zhan-Long. Research on Related Technologies of INS/Geomagnetic Matching Integrated Navigation [Ph.D. dissertation], Southeast University, China, 2015. [66] Lin L K, Xia Y M, Wu D. A hybrid fuzzy multiple criteria decision-making approach for comprehensive performance evaluation of tunnel boring machine disc cutter. Computers & Industrial Engineering, 2020, 149: Article No. 106793 [67] Jiao J L, Ren H L, Sun S Z. Assessment of surface ship environment adaptability in seaways: A fuzzy comprehensive evaluation method. International Journal of Naval Architecture and Ocean Engineering, 2016, 8(4): 344-359 doi: 10.1016/j.ijnaoe.2016.05.002 [68] 杨贵军, 蒋朝辉, 桂卫华, 阳春华, 谢永芳. 基于熵权-可拓理论的高炉软熔带位置状态模糊综合评判方法. 自动化学报, 2015, 41(1): 75-83Yang Gui-Jun, Jiang Zhao-Hui, Gui Wei-Hua, Yang Chun-Hua, Xie Yong-Fang. Fuzzy synthesis evaluation method for position state of blast furnace cohesive zone based on entropy weight extension theory. Acta Automatica Sinica, 2015, 41(1): 75-83 [69] Chen T, Jin Y Y, Qiu X P, Chen X. A hybrid fuzzy evaluation method for safety assessment of food-waste feed based on entropy and the analytic hierarchy process methods. Expert Systems with Applications, 2014, 41(16): 7328-7337 doi: 10.1016/j.eswa.2014.06.006 [70] Liang D C, Dai Z Y, Wang M W. Assessing customer satisfaction of O2O takeaway based on online reviews by integrating fuzzy comprehensive evaluation with AHP and probabilistic linguistic term sets. Applied Soft Computing, 2021, 98: Article No. 106847 doi: 10.1016/j.asoc.2020.106847 [71] Zhao X G, Liang J, Meng J, Zhou Y. An improved quantum particle swarm optimization algorithm for environmental economic dispatch. Expert Systems With Applications, 2020, 152: Article No. 113370 doi: 10.1016/j.eswa.2020.113370 [72] Xu G P, Cui Q L, Shi X H, Ge H W, Zhan Z H, Lee H P, et al. Particle swarm optimization based on dimensional learning strategy. Swarm and Evolutionary Computation, 2019, 45: 33-51 doi: 10.1016/j.swevo.2018.12.009 [73] Zhang Q F, Li H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Transactions on Evolutionary Computation, 2007, 11(6): 712-731 doi: 10.1109/TEVC.2007.892759 [74] Li H, Zhang Q F. Multiobjective optimization problems with complicated Pareto sets, MOEA/D and NSGA-II. IEEE Transactions on Evolutionary Computation, 2009, 13(2): 284-302 doi: 10.1109/TEVC.2008.925798 [75] Silva R C P, Li M, Rahman T, Lowther D A. Surrogate-based MOEA/D for electric motor design with scarce function evaluations. In: Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC). Miami, USA: IEEE, 2016. 1 [76] Chen Z Y, Liu Y, Yang Z L, Fu X W, Tan J B, Yang X F. An enhanced teaching-learning-based optimization algorithm with self-adaptive and learning operators and its search bias towards origin. Swarm and Evolutionary Computation, 2021, 60: Article No. 100766 doi: 10.1016/j.swevo.2020.100766 [77] Rao R V, Savsani V J, Vakharia D P. Teaching-learning-based optimization: A novel method for constrained mechanical design optimization problems. Computer-Aided Design, 2011, 43(3): 303-315 doi: 10.1016/j.cad.2010.12.015 [78] Deb K, Jain H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, Part I: Solving problems with box constraints. IEEE Transactions on Evolutionary Computation, 2014, 18(4): 577-601 doi: 10.1109/TEVC.2013.2281535 [79] Li B J, Huang S T, Ye J, Li Y S, Shen A W, Deng J L. Optimal design method for LLCL filters based on NSGA-III. Journal of Power Electronics, 2020, 20(2): 1250-1260 [80] Ali R, Lee S Y, Chung T C. Accurate multi-criteria decision making methodology for recommending machine learning algorithm. Expert Systems With Applications, 2017, 71: 257-278 doi: 10.1016/j.eswa.2016.11.034 [81] Sarraf R, McGuire M P. Integration and comparison of multi-criteria decision making methods in safe route planner. Expert Systems With Applications, 2020, 154: Article No. 113399 doi: 10.1016/j.eswa.2020.113399 [82] 王宗润, 汤小芸. 基于TOPSIS方法改进的多属性决策模型: 最小化偏好反转. 控制与决策, 2021, 36(1): 216-225Wang Zong-Run, Tang Xiao-Yun. Modified MCDM model based on TOPSIS method: Minimizing preference reversal. Control and Decision, 2021, 36(1): 216-225 -

 下载:
下载:

计量
- 文章访问数: 2609
- HTML全文浏览量: 1253
- PDF下载量: 712
- 被引次数: 0
