

Cooperative Indoor Path Planning of Multi-UAVs for High-rise Fire Fighting Based on RRT-forest Algorithm
-
摘要: 在多无人机 (Multi-unmanned aerial vehicles, Multi-UAVs) 协同执行高层消防救援任务的场景中, 室内复杂火场环境下路径规划是亟待解决难题之一. 针对快速搜索随机树算法 (Rapidly-exploring random tree, RRT) 搜索区域受限、耗时较长、结果可行性差等问题, 提出RRT森林算法. 通过随机选取根节点、生成随机树、连接合并随机树, 使高层消防多无人机在复杂室内环境下协同路径规划效率显著提高. 此外, 采用两次动态规划(Dynamic programming, DP)以及改进障碍物接近检测方法, 进一步提高路径的可行性. 最终, 通过仿真验证算法的有效性.Abstract: In the scene of multi-unmanned aerial vehicles (Multi-UAVs) cooperating in high-rise fire fighting mission, path planning in indoor complex fire environment is one of the difficult problems to be solved. This paper proposes the RRT-forest algorithm which aims at the problems existing in traditional rapidly-exploring random tree (RRT) algorithm, such as repeated exploration in the same area, large time consumption and poor feasibility of the results. By adding and developing intermediate random trees, connecting and merging random trees, the RRT-forest algorithm can significantly improve the efficiency of cooperative path planning in complex indoor environment with multi-UAVs for high-rise fire fighting. Moreover, by utilizing dynamic programming (DP) for twice and a novel obstacle proximity detection approach, this method can further improve the feasibility of the result. Finally, simulation is conducted to prove the effectiveness of the proposed algorithm.
-

图 1 基于RRT森林算法的多无人机路径规划方法流程图
Fig. 1 Workflow of multi-UAVs path planning approach based on RRT-forest
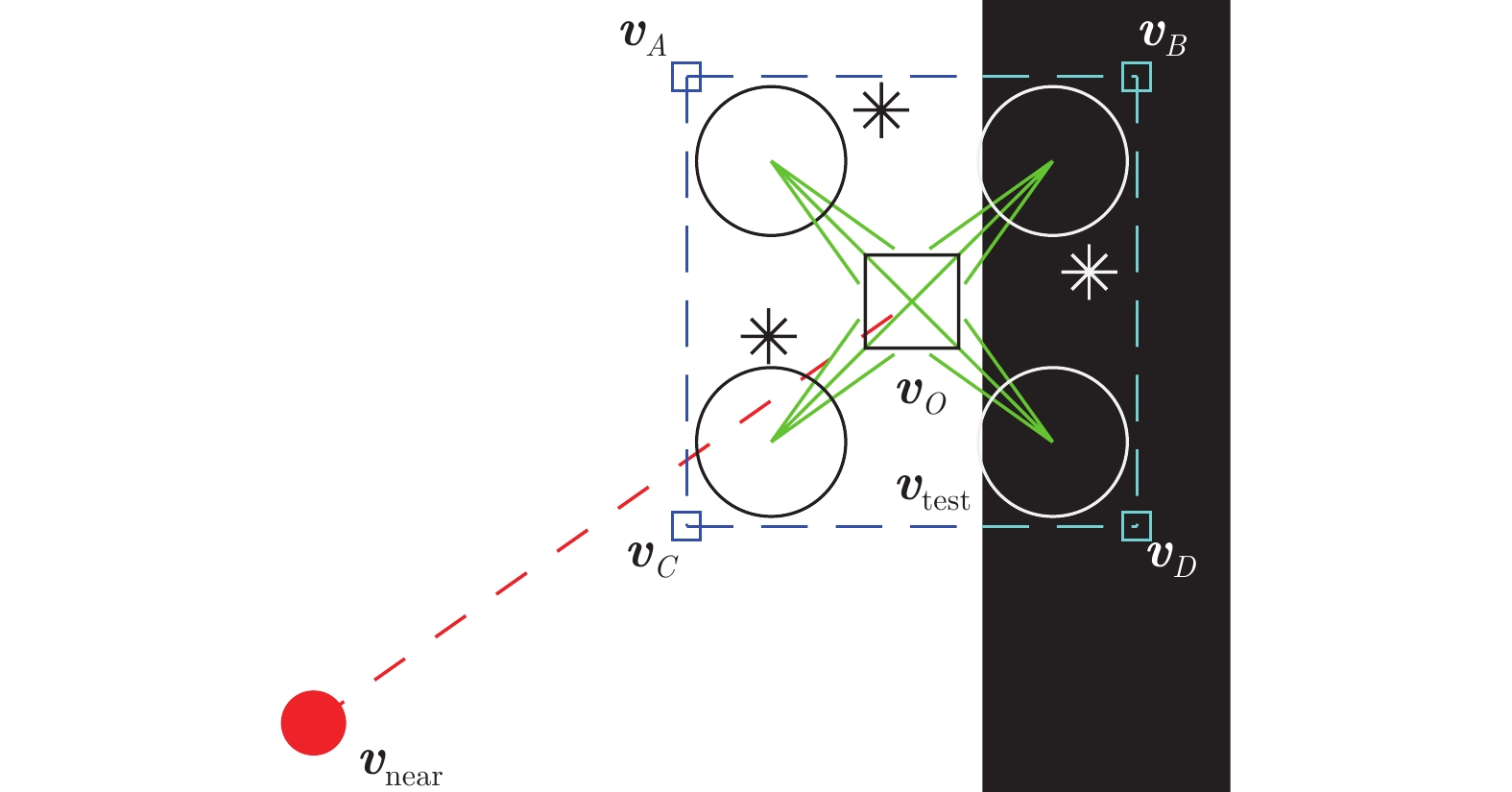
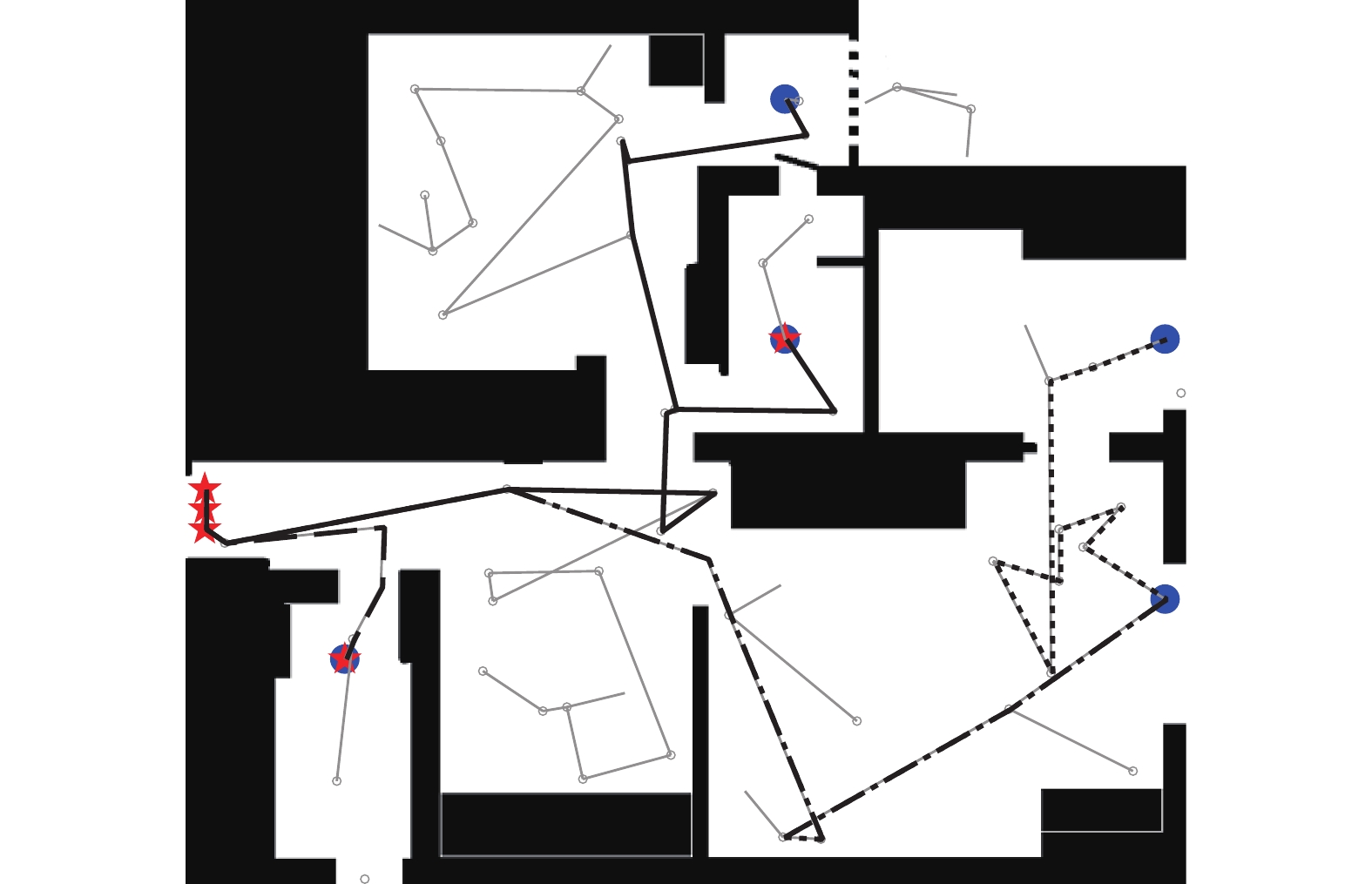
图 6 改进的障碍物接近检测示意图
Fig. 6 Schematic diagram of the improved obstacle proximity detection
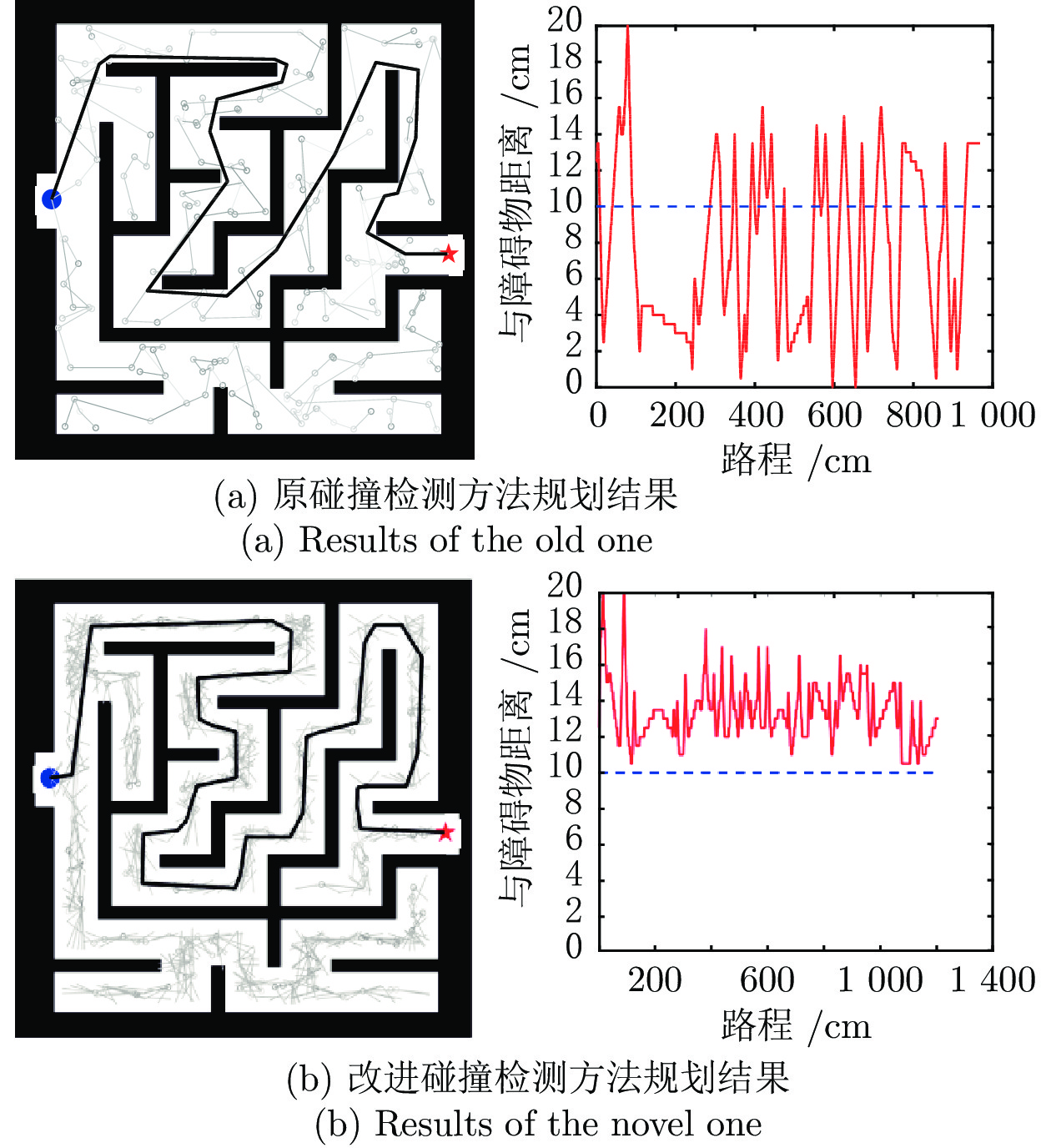
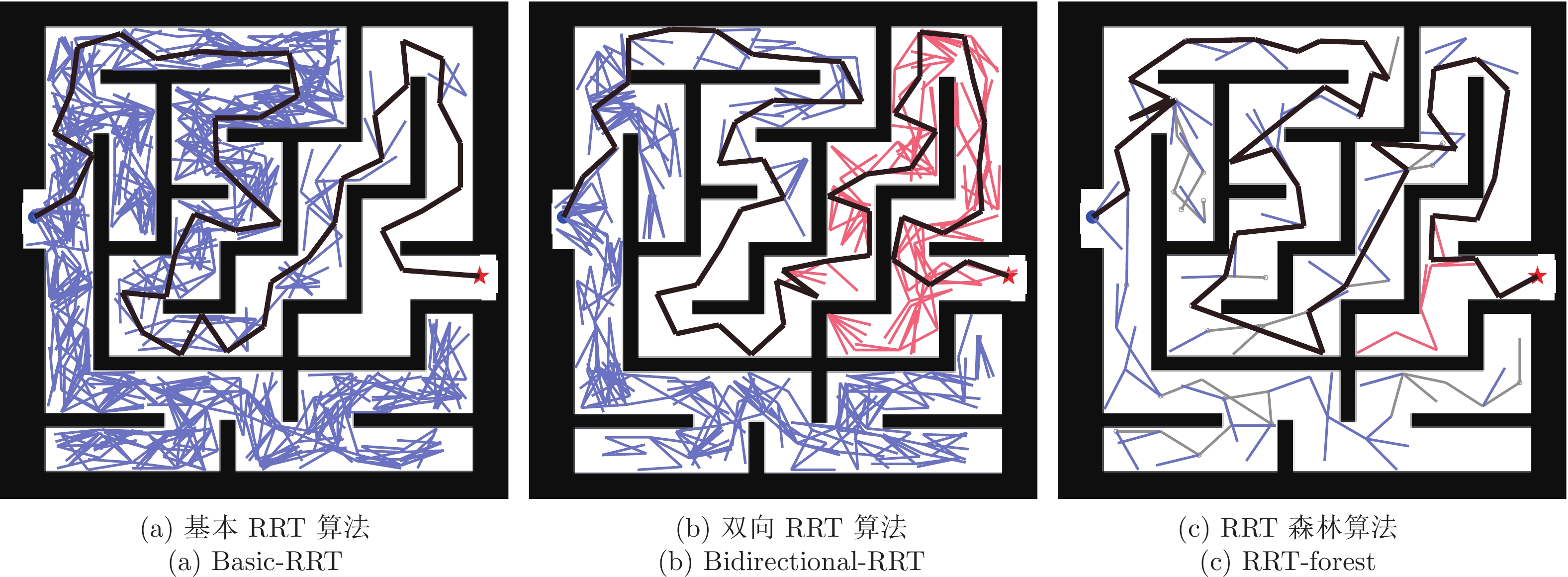
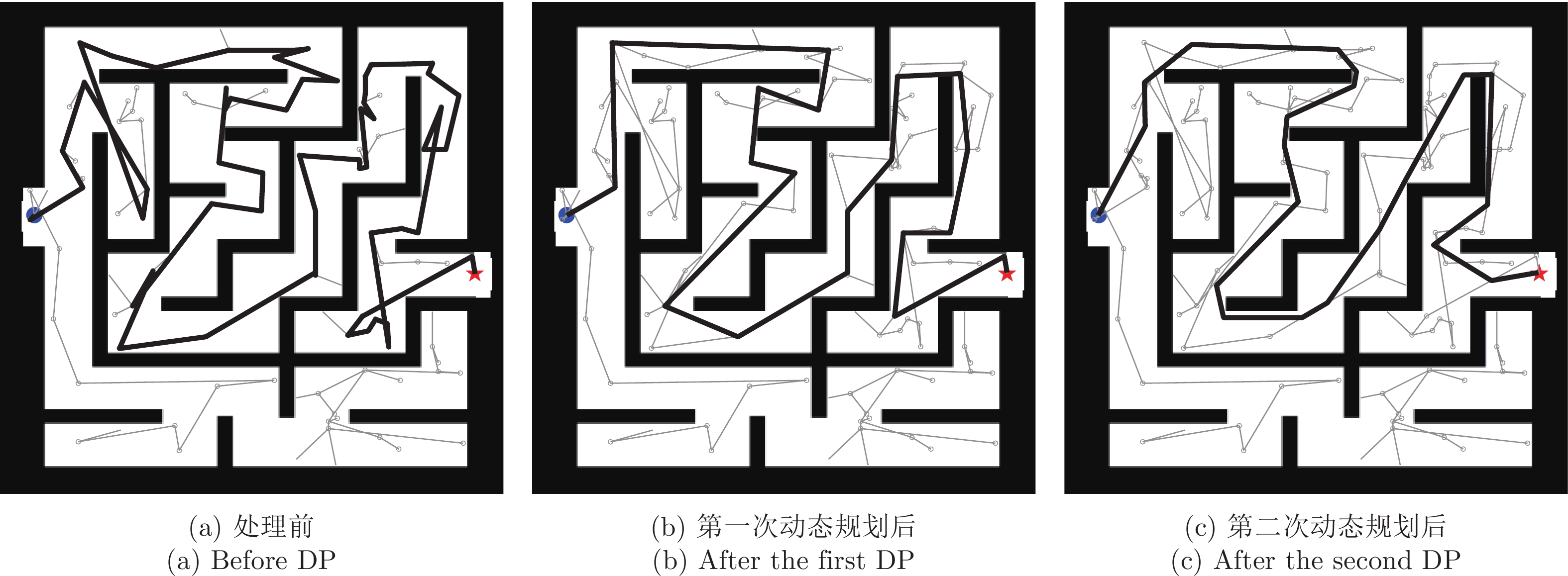
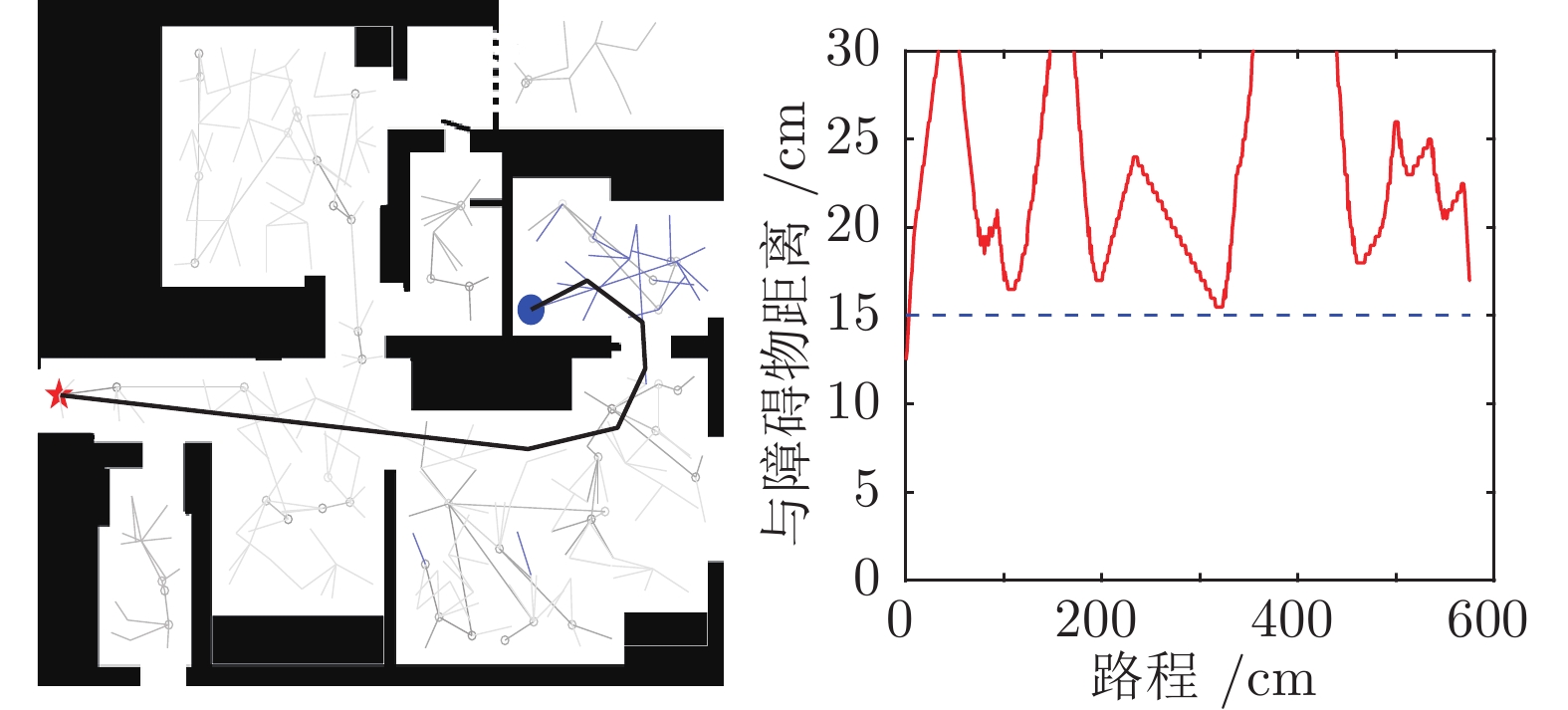
图 12 复杂环境下原碰撞检测与改进碰撞检测对比
Fig. 12 Comparison between novel and original obstacle checking
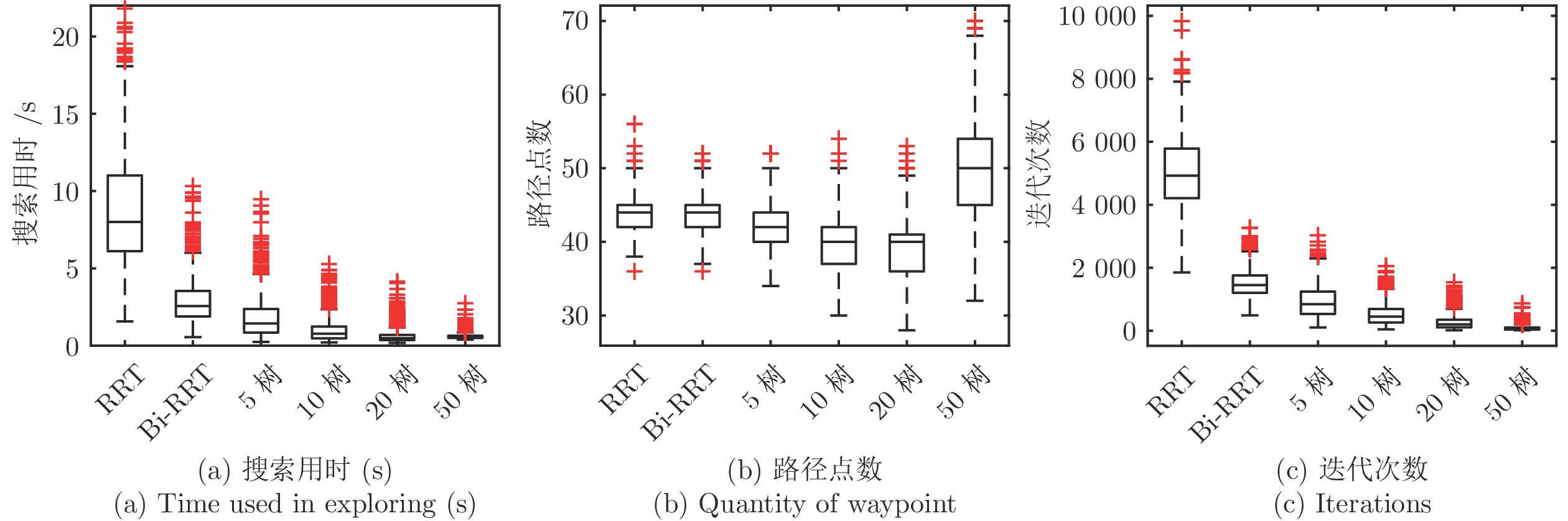
表 1 各算法搜索用时数据(s)
Table 1 Statistics of time used in exploring of each algorithm (s)
基本 RRT 双向 RRT RRT森林 (NTree = 20) 上四分位数 11.0064 3.5425 0.69081 中位数 7.9990 2.5683 0.48464 下四分位数 6.1111 1.8900 0.36128  下载: 导出CSV
下载: 导出CSV
-
[1] 乔萍, 张树平, 万杰, 李华. 基于ISM高层建筑消防救援影响因素研究. 消防科学与技术, 2016, 35(9): 1294-1297Qiao Ping, Zhang Shu-Ping, Wan Jie, Li Hua. Study on affecting factors of high-rise building fire rescue based on ISM. Fire Science and Technology, 2016, 35(9): 1294-1297 [2] 牛小强. 大型商业综合体灭火救援思考. 消防科学与技术, 2013, 32(7): 778-780Niu Xiao-Qiang. Fire fighting and rescue on large commercial complex. Fire Science and Technology, 2013, 32(7): 778-780 [3] Pecho P, Magdolenová P, Bugaj M. Unmanned aerial vehicle technology in the process of early fire localization of buildings. Transportation Research Procedia, 2019, 40: 461-468 doi: 10.1016/j.trpro.2019.07.067 [4] 王莹. 建筑火灾扑救与应急救援. 北京: 中国人民公安大学出版社, 2015.Wang Ying. Building Fire Fighting and Emergency Rescue. Beijing: People's Public Security University of China Press, 2015. [5] 胡玉玲, 王飞跃, 刘希未. 基于ACP方法的高层建筑火灾中人员疏散策略研究. 自动化学报, 2014, 40(2): 185-196Hu Yu-Ling, Wang Fei-Yue, Liu Xi-Wei. ACP-based Research on Evacuation Strategies for High-rise Building Fire. ACTA AUTOMATICA SINICA, 2014, 40(2): 185-196 [6] 孟祥港, 徐鹏程, 董作峰. 无人机在高层灭火中的实际应用. 百科论坛, 2018, (19): 206Meng Xiang-Gang, Xu Peng-Cheng, Dong Zuo-Feng. Practical Application of UAV in High-rise Fire Extinguishing. Encyclopedia Forum, 2018, (19): 206 [7] 刘永军, 刘卓斌, 王大勇. 面向高层建筑的消防无人机应用探讨. 科技创新导报, 2020, 17(3): 4-7Liu Yong-Jun, Liu Zhuo-Bin, Wang Da-Yong. Discussion on the Application of Fire Fighting UAV for High-rise Buildings. Science and Technology Innovation Herald, 2020, 17(3): 4-7 [8] 周锐, 吴雯漫, 罗广文. 自主多无人机的分散化协同控制. 航空学报, 2008, (S1): 26-32Zhou Rui, Wu Wen-Man, Luo Guang-Wen. Decentralized coordination control of multiple autonomous UAVs. Acta Aeronautica et Astronautica Sinica, 2008, (S1): 26-32 [9] 温卫敏. 一种最优路径规划的灭火机器人系统设计. 四川理工学院学报(自然科学版), 2018, 31(3): 21-28Wen Wei-Min. Design of a fire-fighting robot system based on optimal path planning. Journal of Sichuan University of Science & Engineering (Natural Science Edition), 2018, 31(3): 21-28 [10] 卢伊. 基于用户心理模型研究的高层消防产品设计实践——以消防无人机为例 [硕士学位论文], 湖北工业大学, 中国, 2019.Lu Yi. Design Practice of High-rise Fire Protection Products Based on User Psychology Model-taking Fire Man Machine as an Example [Master thesis], Hubei University of Technology, China, 2019. [11] 杜永浩, 邢立宁, 蔡昭权. 无人飞行器集群智能调度技术综述. 自动化学报, 2020, 46(2): 222-241Du Yong-Hao, Xing Li-Ning, Cai Zhao-Quan. Survey on Intelligent Scheduling Technologies for Unmanned Flying Craft Clusters. ACTA AUTOMATICA SINICA, 2020, 46(2): 222-241 [12] Wang Gai-Ge, Chu Hai-Cheng, Eric, Mirjalili, Seyedali. Three-dimensional path planning for UCAV using an improved bat algorithm. Aerospace science and technology, 2016, 49: 231-238 doi: 10.1016/j.ast.2015.11.040 [13] 韩忠华, 毕开元, 杨丽英. 室内复杂环境下多旋翼无人机动态路径规划. 中国惯性技术学报, 2019, 27(3): 366-377Han Zhong-Hua, Bi Kai-Yuan, Yang Li-Ying. Dynamic path planning of multi-rotor unmanned aerial vehicle in indoor complex environment. Journal of Chinese Inertial Technology, 2019, 27(3): 366-377 [14] 王赟. 基于 RRT 轮式机器人路径规划方法研究 [硕士学位论文], 天津工业大学, 中国, 2019.Wang Yun. Research on Path Planning Method of Wheeled Robot Based on RRT [Master thesis], Tianjin Polytechnic University, China, 2019. [15] 刘恩海, 高文斌, 孔瑞平, 刘贝野, 董瑶, 陈媛媛. 改进的RRT路径规划算法. 计算机工程与设计, 2019, 40(8): 2253-2258Liu En-Hai, Gao Wen-Bin, Kong Rui-Ping, Liu Bei-Ye, Dong Yao, Chen Yuan-Yuan. Improved RRT path planning algorithm. Computer Engineering and Design, 2019, 40(8): 2253-2258 [16] 武晓晶, 许磊, 甄然, 吴学礼. 动态步长BI-RRT的无人机航迹规划算法. 河北科技大学学报, 2019, 40(5): 414-422Wu Xiao-Jing, Xu Lei, Zhen Ran, Wu Xue-Li. Dynamicstep BI-RRT UAV path planning algorithm. Journal of Hebei University of Science and Technology, 2019, 40(5): 414-422 [17] 王道威, 朱明富, 刘慧. 动态步长的RRT路径规划算法. 计算机技术与发展, 2016, 26(3): 105-112Wang Dao-Wei, Zhu Ming-Fu, Liu Hui. Rapidly-exploring random tree algorithm based on dynamic step. Computer Technology and Development, 2016, 26(3): 105-112 [18] 钟建冬. 基于狭窄通道识别的机器人路径规划研究 [博士学位论文], 上海交通大学, 中国, 2012.Zhong Jian-Dong. Robot Path Planning Based on Narrow Passage Reconition [Ph.D. dissertation], Shanghai Jiao Tong University, China, 2012. [19] Amin J, Bokovic J, Mehra R. A fast and effificient approach to path planning for unmanned vehicles. In: Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit. Colorado, USA: AIAA, 2006. [20] Devaurs D, Siméon T, Cortés J. A multi-tree extension of the transition-based RRT: Application to ordering-and-pathfinding problems in continuous cost spaces. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 2991−2996 [21] Wong C B, Yang E F, Yan X T, Gu D B. Optimal path planning based on a multi-tree T-RRT* approach for robotic task planning in continuous cost spaces. In: Proceedings of the 12th France-Japan and the 10th Europe-Asia Congress on Mechatronics. Tsu, Japan: IEEE, 2018. 242−247 [22] 沈刚, 邵金菊, 谭德荣. 基于改进A$^*$算法的智能车路径规划研究. 汽车实用技术, 2020, (2): 28-30Shen Gang, Shao Jin-Ju, Tan De-Rong. Research on global path planning for intelligent vehicles based on improved A$^*$ algorithm. Automobile Applied Technology, 2020, (2): 28-30 [23] 司徒华杰, 雷海波, 庄春刚. 动态环境下基于人工势场引导的RRT路径规划算法. 计算机应用研究, 2020, 38(3): 1-5Situ Hua-Jie, Lei Hai-Bo, Zhuang Chun-Gang. Artificial potential field based RRT algorithm for path planning in dynamic environment. Application Research of Computers, 2020, 38(3): 1-5 [24] Jeong In-Bae, Lee Seung-Jae, Kim Jong-Hwan. Quick-RRT$^*$: triangular inequality-based implementation of RRT$^*$ with improved initial solution and convergence Rate. Expert Systems with Applications, 2019, 123: 82-90 doi: 10.1016/j.eswa.2019.01.032 [25] 朱庆保. 复杂环境下的机器人路径规划蚂蚁算法. 自动化学报, 2006, 32(4): 586-593Zhu Qing-Bao. Ant Algorithm for Path Planning of Mobile Robot in a Complex Environment. ACTA AUTOMATICA SINICA, 2006, 32(4): 586-593 [26] 袁静妮, 杨林, 唐晓峰, 陈傲文. 基于改进RRT$^*$与行驶轨迹优化的智能汽车运动规划. 自动化学报, 2020, 46(x): 1-10Yuan Jing-Ni, Yang Lin, Tang Xiao-Feng, Chen Ao-Wen. Autonomous Vehicle Motion Planning based on Improved RRT$^*$ Algorithm and Trajectory Optimization. Acta Automatica Sinica, 2020, 46(x): 1-10 [27] 张化光, 张欣, 罗艳红, 杨珺. 自适应动态规划综述. 自动化学报, 2013, 39(4): 303-311 doi: 10.1016/S1874-1029(13)60031-2Zhang Hua-Guang, Zhang Xin, Luo Yan-Hong, Yang Jun. An Overview of Research on Adaptive Dynamic Programming. ACTA AUTOMATICA SINICA, 2013, 39(4): 303-311 doi: 10.1016/S1874-1029(13)60031-2 -

 下载:
下载:


计量
- 文章访问数: 2413
- HTML全文浏览量: 1514
- PDF下载量: 507
- 被引次数: 0
