

Observer-based Longitudinal Control for Connected and Automated Vehicles Platoon Subject to Communication Delay
-
摘要: 考虑通信延时影响的车辆队列控制问题, 提出一种基于观测器的分布式车辆队列纵向控制器. 首先, 基于分层控制策略分别设计上下层控制器, 通过上层控制器优化期望加速度、下层控制器克服车辆模型非线性实现期望加速度和实际加速度的一致. 上层控制器设计过程中, 基于三阶线性化车辆模型, 考虑观测器、车辆动态耦合特性和通信延时, 提出一种通信延时环境下基于观测器的车辆队列控制器, 利用观测器估计领导车辆加速度信息从而减轻通信负担. 然后, 利用Lyapunov-Krasovskii方法分析车辆队列的稳定性, 并得出通信延时上界, 同时利用传递函数方法分析了串稳定性. 最后, 通过数值仿真验证上层控制器的有效性和稳定性. 在此基础上, 利用PreScan软件中高保真车辆动态模型, 验证了该分层控制策略的有效性.Abstract: This paper proposes a distributed longitudinal controller subject to communication delay based on the observer. Firstly, the high-level and low-level controllers are designed respectively based on the hierarchical control strategy, where the desired acceleration is optimized by the high-level controller and the low-level controller is proposed to follow it. In the design process of the high-level controller, a new distributed controller is proposed based on the third order dynamics model jointly the communication delays, observer, and dynamic coupling characteristics of vehicles. In particular, the acceleration of the leader vehicle is estimated by the observer for reducing the communication costs. Then, the stability of the proposed controller is analyzed using the Lyapunov-Krasovskii method, and an estimate of the delay bound is provided. The string stability of the platoon is analyzed using the transfer function method. Finally, the effectiveness and stability of the high-level controller are verified by numerical simulation. Furthermore, the effectiveness of the proposed controller is verified by simulations using a high-fidelity vehicle dynamic model in PreScan.
-
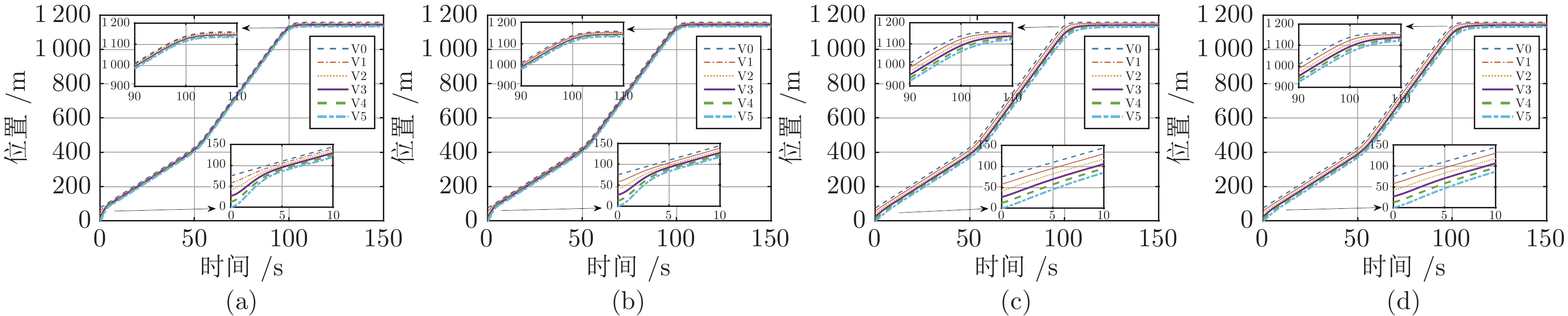
图 6 位置图((a)无延时[12]; (b)$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$[12]; (c)控制器(14)-无延时; (d) 控制器(14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
Fig. 6 Position profile ((a) No time delay[12]; (b) $\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$[12]; (c) Controller (14)-no time delay; (d) Controller (14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)

图 7 速度图((a)无延时[12]; (b)$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$[12]; (c)控制器(14)-无延时; (d) 控制器(14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
Fig. 7 Velocity profile ((a) No time delay[12]; (b) $\tau (t) \in [0.1,\;0.2]{\rm{s}}$[12]; (c) Controller (14)-no time delay; (d) Controller (14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
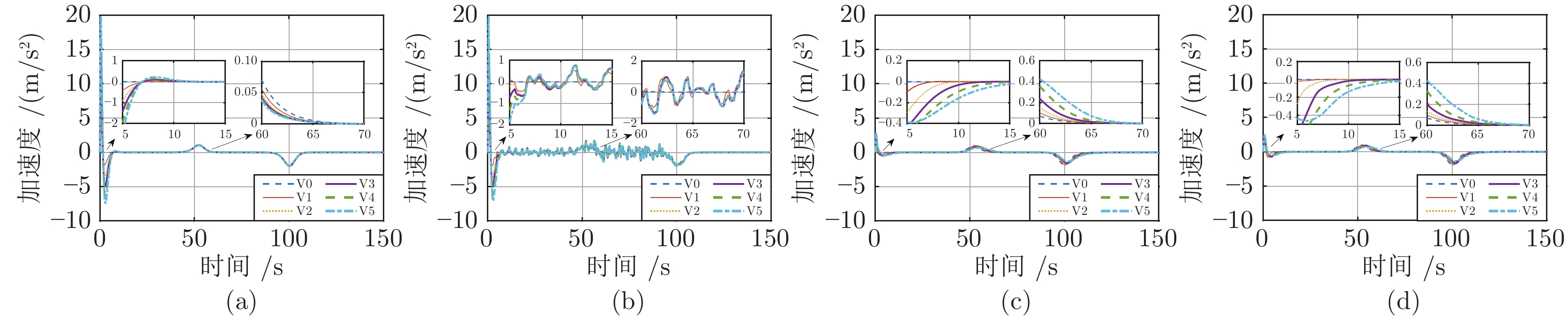
图 8 加速度图((a)无延时[12]; (b)$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$[12]; (c)控制器(14)-无延时; (d) 控制器(14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
Fig. 8 Acceleration profile ((a) No time delay[12]; (b) $\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$[12]; (c) Controller (14)-no time delay; (d) Controller (14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
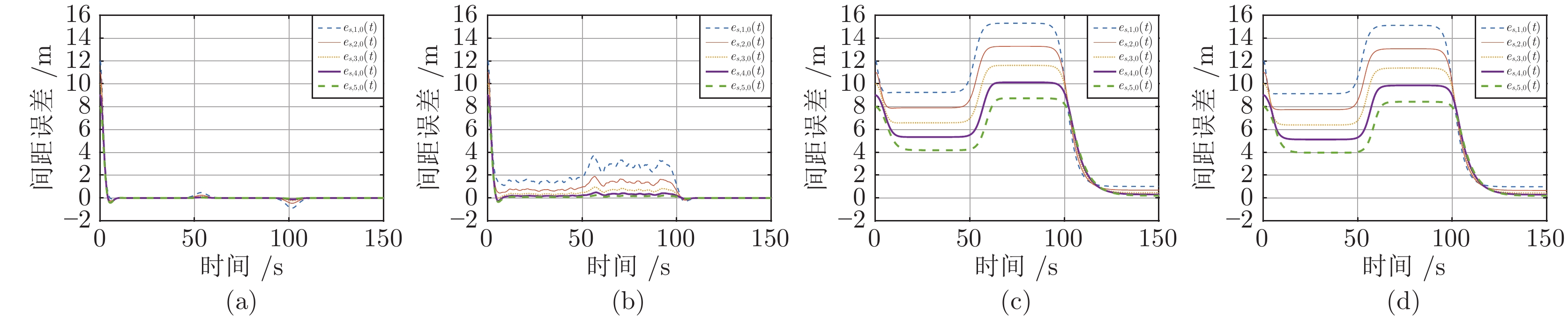
图 9 间距误差图 ((a)无延时[12]; (b)$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$[12]; (c)控制器(14)-无延时; (d) 控制器(14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
Fig. 9 Spacing error profile ((a) No time delay[12]; (b) $\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$[12]; (c) Controller (14)-no time delay; (d) Controller (14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
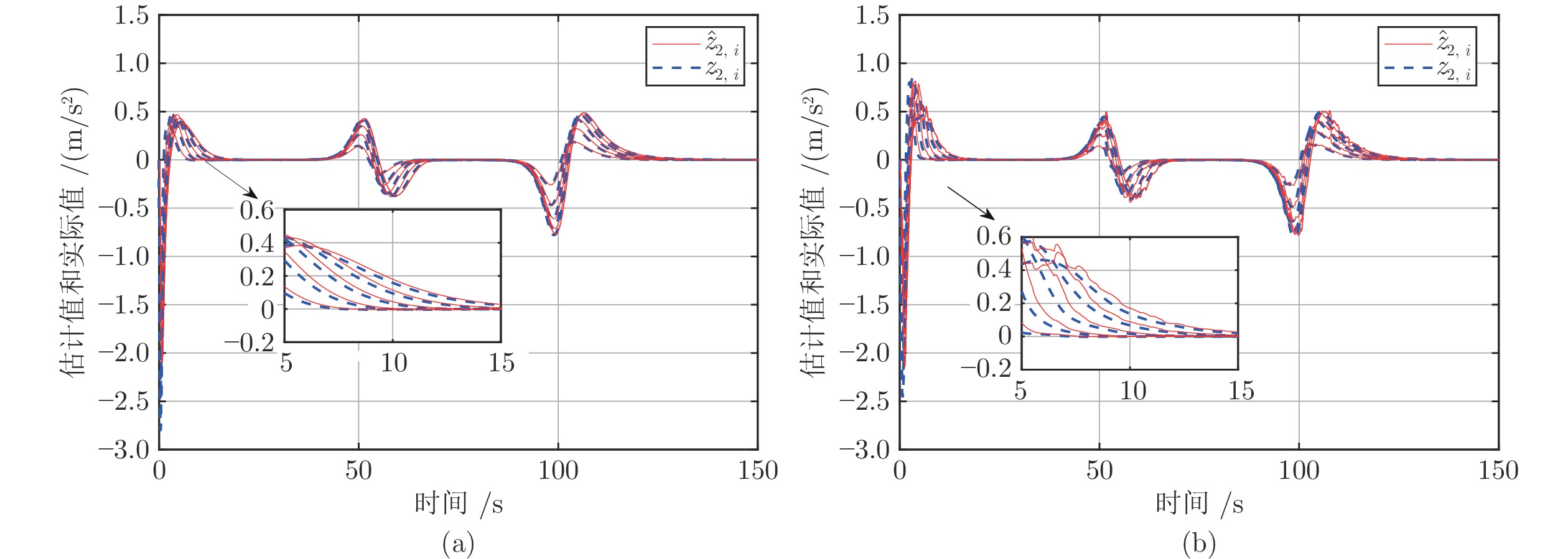
图 10 ${z_{2,i}}(t)$和${\hat z_{2,i}}(t)$ ((a)控制器(14)-无延时; (b) 控制器(14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
Fig. 10 ${z_{2,i}}(t)$ and ${\hat z_{2,i}}(t)$ ((a) Controller (14)-no time delay; (b) Controller (14)-$\tau (t) \in [0.1,\;0.2]\;{\rm{s}}$)
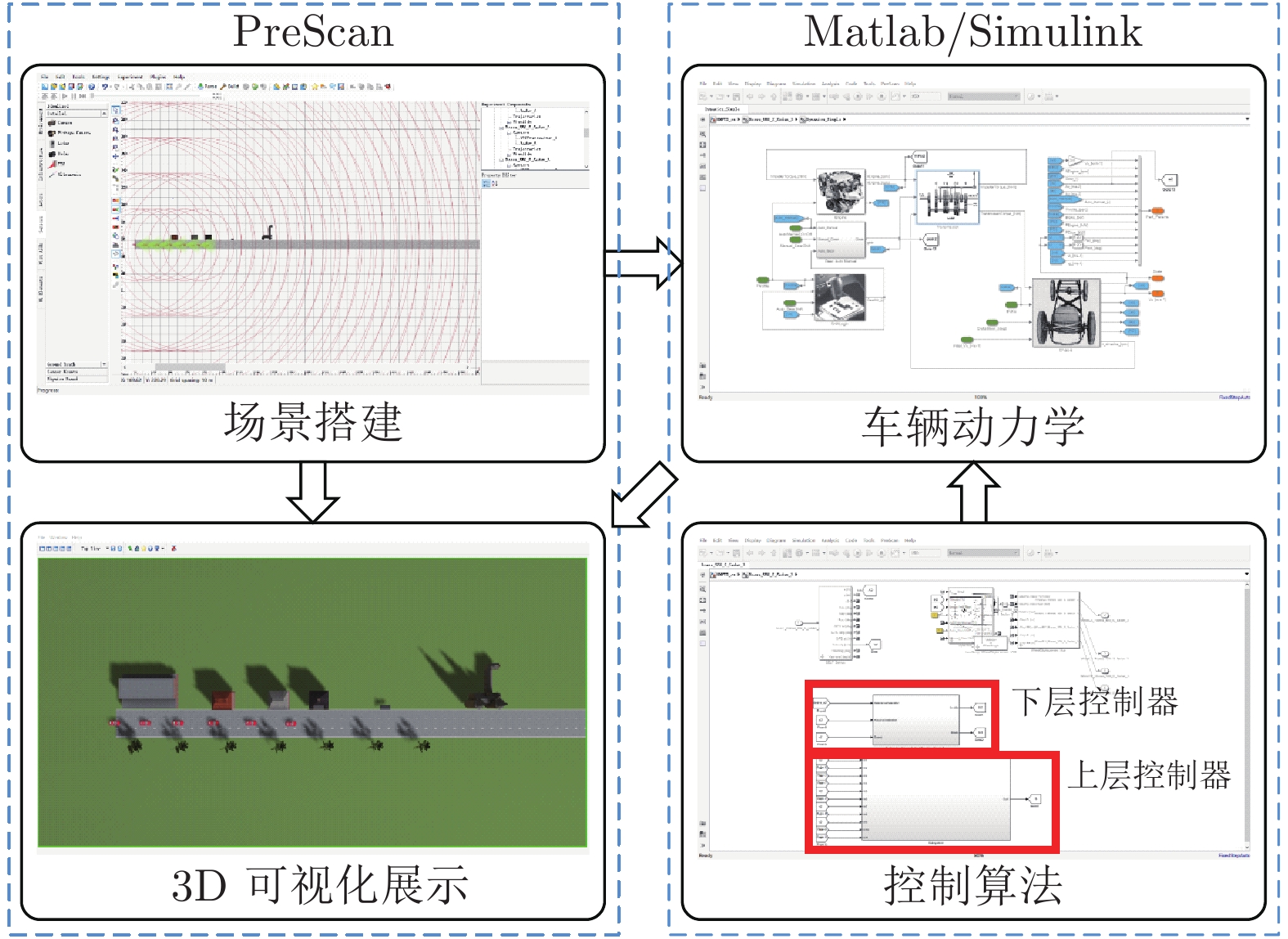
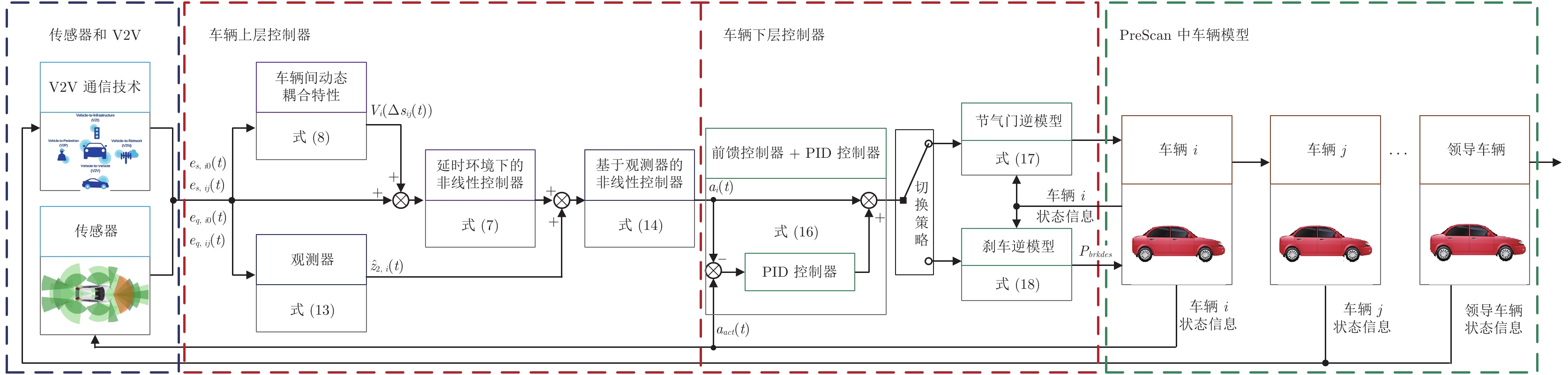
图 11 基于PreScan/Simulink联合仿真平台框架示意图
Fig. 11 Framework of the PreScan/Simulink-based co-simulation platform
表 1 控制器参数
Table 1 Controller parameters
参数 数值 单位 $\alpha $ $0.67$ ${{\rm{s}}^{ - 1}}$ ${g_{o,1}}$ $0.12$ ${{\rm{s}}^{ - 2}}$ ${g_{o,2}}$ $0.52$ ${{\rm{s}}^{ - 1}}$ ${g_{o,3}}$ $0.30$ — ${V_1}$ $6.75$ ${\rm{m/s}}$ ${V_2}$ $7.91$ ${\rm{m/s}}$ ${C_1}$ $0.13$ ${{\rm{m}}^{ - 1}}$ ${C_2}$ $1.59$ — ${h_1}$ $30$ — ${h_2}$ $12$ — ${k_P}$ $10$ — ${k_I}$ $0.30$ — ${k_D}$ $0.10$ — $\vartheta $ $0.10$ ${\rm{m/}}{{\rm{s}}^2}$  下载: 导出CSV
下载: 导出CSV
表 2 PreScan中车辆模型参数
Table 2 The parameters of vehicle model in PreScan
参数 数值 单位 $m$ $1\,532$ ${\rm{kg}}$ $g$ $9.80$ ${\rm{m/}}{{\rm{s}}^2}$ ${l_c}$ $4.63$ ${\rm{m}}$ ${C_A}$ $0.31$ ${\rm{kg/m}}$ ${i_0}$ $2.70$ — ${\eta _{\rm{T}}}$ $1.00$ — $f$ $0.01$ —
下载: 导出CSV
-
[1] Varaiya P. Smart cars on smart roads: problems of control. IEEE Transactions on Automatic Control, 1993, 38(2): 195-207. doi: 10.1109/9.250509 [2] Axelsson J. Safety in vehicle platooning: a systematic literature review. IEEE Transactions on Intelligent Trans -portation Systems, 2017, 18(5): 10330-1045. [3] Xiao L, Gao F. A comprehensive review of the development of adaptive cruise control systems. Vehicle System Dynamics, 2010, 48(10): 1167-1192. doi: 10.1080/00423110903365910 [4] Li S E, Zheng Y, Li K Q, Wu Y J, Hedrick K, Gao F, Zhang H W. Dynamical modeling and distributed control of connected and automated vehicles: challenges and opportunities. IEEE Intelligent Transportation Systems Magazine, 2017, 9(3): 46-58. doi: 10.1109/MITS.2017.2709781 [5] Swaroop D, Hedrick J K, Choi S. B. Direct adaptive longitudinal control of vehicle platoons. IEEE Tran -sactions on Vehicular Technology, 2001, 50(1): 150-161. doi: 10.1109/25.917908 [6] Dunbar W B, Caveney D S, Distributed receding horizon control of vehicle platoons: stability and string stability. IEEE Transactions on Automatic Control, 2012, 57(3): 620-633. doi: 10.1109/TAC.2011.2159651 [7] Naus G J L, Vugts R P A, Ploeg J, van de Molengraft M J G, Steinbuch M. String-stable CACC design and experimental validation: a frequency-domain approach. IEEE Transactions on Vehicular Technology, 2010, 59(9): 4268-4279. doi: 10.1109/TVT.2010.2076320 [8] Guo X, Wang J, Liao F, Teo R. S. H. Distributed adaptive integrated-sliding-mode controller synthesis for string stability of vehicle platoons. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(9): 2419-2429. doi: 10.1109/TITS.2016.2519941 [9] Sawant J, Chaskar U, Ginoya D. Robust control of cooperative adaptive cruise control in the absence of information about preceding vehicle acceleration. IEEE Transactions on Intelligent Transportation Systems, to be published [10] Ge J I, Orosz G. Dynamics of connected vehicle systems with delayed acceleration feedback. Transportation Research Part C: Emerging Technologies, 2014 46: 46-64. doi: 10.1016/j.trc.2014.04.014 [11] Guo G, Yue W. Hierarchical platoon control with heterogeneous information feedback. IET Control Theory & Applications, 2011, 5(15): 1766-1781. [12] Zheng Y, Li S E, Wang J, Cao D, Li K Q. Stability and scalability of homogeneous vehicular platoon: study on the influence of information flow topologies. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1): 14-26. doi: 10.1109/TITS.2015.2402153 [13] Zheng Y, Li S E, Li K Q, Wang L Y. Stability margin improvement of vehicular platoon considering undirected topology and asymmetric control. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1253-1265. doi: 10.1109/TCST.2015.2483564 [14] De O S F, Torres L A B, Mozelli L A, Neto A A. Stability and formation error of homogeneous vehicular platoons with communication time delays. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(10): 4338-4349. doi: 10.1109/TITS.2019.2939777 [15] Salvi A, Santini S, Valente A S. Design, analysis and performance evaluation of a third order distributed protocol for platooning in the presence of time-varying delays and switching topologies. Transportation Research Part C: Emerging Technologies, 2017, 80: 360-383. doi: 10.1016/j.trc.2017.04.013 [16] Liu Y, Gao H, Zhai C, Xie W. Internal stability and string stability of connected vehicle systems with time delays. IEEE Transactions on Intelligent Transportation Systems, to be published [17] Khalifa A, Kermorgant O, Dominguez S, Martinet P. Platooning of car-like vehicles in urban environments: An observer-based approach considering actuator dynamics and time delays. IEEE Transactions on Intelligent Transportation Systems, to be published [18] Batsuuri T, Bril R J, Lukkien J J. Model, analysis and improvements for inter-vehicle communication using one-hop periodic broadcasting based on the 802.11p protocol. In: Proceedings of the Wireless Sensor and Mobile Ad-Hoc Networks. New York, USA: Springer, 2015. 185−215 [19] Li Y F, Tang C C, Peeta S, Wang Y B. Nonlinear consensus-based connected vehicle platoon control incorporating car-following interactions and heterogeneous time delays. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2209-2219. doi: 10.1109/TITS.2018.2865546 [20] 李永福, 何昌鹏, 朱浩, 郑太雄. 通信延时环境下异质网联车辆队列非线性纵向控制. 自动化学报, DOI: 10.16383/j.aas.c190442 Li Yong-Fu, He Chang-Peng, Zhu Hao, Zheng Tai-Xiong. Nonlinear longitudinal control for heterogeneous connected vehicle platoon in the presence of communication delay. Acta Automatica Sinica, DOI: 10.16383/j.aas.c190442[21] Horn R, Johnson C. Matrix Analysis. Cambridge: Cambridge University Press, 1987. 105−106 [22] Gu K, Kharitonov V L, Chen J. Stability of Time-delay Systems (Control Engineering). Boston: Birkhäuser, 2012. 10−11 [23] Li Y F, Chen W B, Peeta S, Wang Y B. Platoon control of connected multi-vehicle systems under V2X communications: design and experiments. IEEE Transactions on Intelligent Transportation Systems, 2020 21(5): 1891-1902. doi: 10.1109/TITS.2019.2905039 [24] Petrillo A, Salvi A, Santini S, Valente A S. Adaptive multi-agents synchronization for collaborative driving of autonomous vehicles with multiple communication delays. Transportation Research Part C: Emerging Technologies, 2018, 86: 372-392. doi: 10.1016/j.trc.2017.11.009 [25] Fiengo G, Lui D G, Petrillo A, Santini S, Tufo M. Distributed robust PID control for leader tracking in uncertain connected ground vehicles with V2V communication delay. IEEE/ASME Transactions on Mechatronics, 2019, 24(3): 1153-1165. doi: 10.1109/TMECH.2019.2907053 [26] Chen J Z, Liang H, Li J, Lv Z K. Connected automated vehicle platoon control with input saturation and variable time headway strategy. IEEE Transactions on Intelligent Transportation Systems, to be published [27] Li S E, Gao F, Cao D, Li K. Multiple-model switching control of vehicle longitudinal dynamics for platoon-level automation. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4480-4492. doi: 10.1109/TVT.2016.2541219 [28] Khalil H K, Nonlinear Systems (3rd edition). Englewood: Prentice-Hall, 2002. 136−139 [29] Li Y F, Tang C C, Peeta S, Wang Y B. Integral-sliding-mode braking control for a connected vehicle platoon: theory and application. IEEE Trans -actions on Industrial Electronics, 2019, 66(6): 4618-4628. doi: 10.1109/TIE.2018.2864708 [30] Alasmary W, Zhuang W H. Mobility impact in IEEE 802.11p infrastructureless vehicular networks. Ad Hoc Networks, 2012, 10(2): 222-230. doi: 10.1016/j.adhoc.2010.06.006 -

 下载:
下载:

计量
- 文章访问数: 2902
- HTML全文浏览量: 819
- PDF下载量: 455
- 被引次数: 0
