

-
摘要: 针对航拍图像易受雾气影响, AOD-Net (All in one dehazing network)算法对图像去雾后容易出现细节模糊、对比度过高和图像偏暗等问题, 本文提出了一种基于改进AOD-Net的航拍图像去雾算法. 本文主要从网络结构、损失函数、训练方式三个方面对AOD-Net进行改良. 首先在AOD-Net的第二个特征融合层上添加了第一层的特征图, 用全逐点卷积替换了传统卷积方式, 并用多尺度结构提升了网络对细节的处理能力. 然后用包含有图像重构损失函数、SSIM (Structural similarity)损失函数以及TV (Total variation)损失函数的复合损失函数优化去雾图的对比度、亮度以及色彩饱和度. 最后采用分段式的训练方式进一步提升了去雾图的质量. 实验结果表明, 经该算法去雾后的图像拥有令人满意的去雾结果, 图像的饱和度和对比度相较于AOD-Net更自然. 与其他对比算法相比, 该算法在合成图像实验、真实航拍图像实验以及算法耗时测试的综合表现上更好, 更适用于航拍图像实时去雾.Abstract: As the aerial images are easily affected by fog, the defogging image processed by AOD-Net is prone to problems such as blurring of image details, excessive contrast and low brightness. A defogging algorithm for aerial image with improved AOD-Net was proposed. We mainly improve AOD-Net from three aspects: network structure, loss function and training method. Firstly, we add the feature image of the first layer to the second feature fusion layer of AOD-Net, the traditional convolution method is replaced by the fully point-wise convolution, and the multi-scale structure is used to enhance the ability of the network to deal with details. Then, in this paper, a composite loss function including image reconstruction loss function, SSIM loss function and TV loss function is used to optimize the contrast, brightness and color saturation of the defogging image. Finally, we use a segmented training method to further improve the quality of the defogging image. The experimental results show that the image defogged by the proposed algorithm has satisfactory defogging results, the saturation and contrast are more natural than AOD-Net. Compared with other comparison algorithms, the proposed algorithm has better comprehensive performance in synthetic image experiments, real aerial image experiments and time-consuming tests, and is more suitable for real-time defogging of aerial images.
-
水面无人艇是一种无需人工操作的自主水面舰艇, 具有自主性强、成本低、灵活性高等优势. 它可以在危险或人类难以进入的水域执行任务, 广泛应用于民用和军事领域. 例如, 在环境监测、渔业管理、海上搜救、物流运输、通信中继、侦察监视及巡逻防御等方面发挥重要作用[1-6]. 然而, 由于单个无人艇的执行能力有限, 往往难以胜任复杂水域任务. 在此背景下, 多无人艇(Multiple unmanned surface vehicle, Multi-USV)协同作业正逐渐成为未来的发展趋势. 在协同作业中, 多艘无人艇通过协同工作, 共同完成复杂水域任务, 如大范围的海洋协同监测、搜索与救援、水下地形协同测绘和水下目标协同探测等. 值得注意的是, 在某些实际应用场景中, 通过引入无人艇之间的竞争交互机制, 可以有效提升多无人艇协同作业的能力[7-8]. 在这种情形下, 底层信息交互拓扑图往往被建模为符号图. 特别地, 二分编队跟踪控制是符号图下多无人艇系统编队控制领域的基础研究课题之一, 旨在设计一组分布式控制协议, 使得多无人艇系统能够以预设的二分编队构型跟踪参考轨迹[8].
在多无人艇系统编队控制领域, 基于反推控制方法的研究成果丰硕[5, 9-12]. 反推控制是一种基于Lyapunov 理论的递归控制方案设计方法, 自20世纪90年代起便受到系统与控制领域学者们的广泛关注[13-15]. 该方法通过将高阶非线性系统拆分为多个较为简单的低阶系统, 并引入虚拟控制器和参数自适应更新律, 以确保闭环系统的稳定性, 从而逐步推导出实际控制器[14]. 然而, 反推控制方法在控制器设计过程中通常需要使用参考轨迹的高阶导数, 并对系统动力学模型的要求较高. 为了克服这些挑战, 文献[16] 引入命令滤波技术, 避免对虚拟控制器求导, 显著降低了计算负担, 简化了控制律的设计和形式, 从而使得该方法能够适用于更广泛的非线性系统. 然而, 基于命令滤波反推方法的多无人艇系统二分编队跟踪控制的研究目前见诸文献的结果还相对较少.
如文献[17-18] 所述, 无人艇在执行实际任务时, 往往会受到风、浪、水流等环境因素的干扰, 这些因素可能导致无人艇的运行不稳定甚至引发事故. 为了增强控制系统的稳定性和鲁棒性, 考虑模型不确定性变得尤为重要. 在处理具有模型不确定性的非线性系统控制问题时, 确保参数收敛性是一个核心环节, 因为它能够提升闭环系统的整体稳定性和鲁棒性. 传统基于梯度下降法的参数自适应律设计方法, 存在参数漂移的潜在威胁. 在此基础上, 添加阻尼项可以有效抑制其影响, 但是在这种参数自适应律设计方法下人们往往难以证明闭环系统的渐近稳定性. 此外, 在传统的自适应控制中, 必须满足一个严格的持续激励 (Persistent excitation, PE) 条件, 以保证参数的收敛性. 然而, 在实际场景下, PE条件通常难以验证. 为了放松PE条件, 在文献[19]和文献[20]中分别提出了并行学习和复合学习技术, 在较弱的区间激励(Interval excitation, IE) 条件下, 确保了参数的收敛性. 此外, 与并行学习方法相比, 由于复合学习自适应律的设计不依赖于系统状态的导数, 在实际应用中往往更具有优势. 另一方面, 无人艇在执行任务时通常要求快速的控制响应. 引入有限时间或固定时间控制技术[21-22] 可以使受控系统在有限时间内达成目标. 此外, 有限时间及固定时间控制技术不仅可以保证跟踪误差的快速收敛, 而且对不确定性具有良好的鲁棒性.
基于以上讨论, 本文针对模型参数不确定下多无人艇系统的固定时间二分编队跟踪控制问题, 提出一组融合命令滤波、复合学习及反推控制技术的分布式控制协议. 本文的贡献可以概括为以下两个方面: 在反推控制方法中引入命令滤波, 有效地避免了对虚拟控制器求导, 极大地降低了计算负担, 且简化了分布式控制协议的形式; 在反推控制方法中引入复合学习, 使得提出的控制协议在不满足PE条件的情况下, 不仅能够确保编队误差的固定时间收敛性, 也能够确保参数估计误差的固定时间收敛性.
本文使用的符号: $ {\bf{R}}^n $和$ {\bf{R}}^{n\times m} $分别表示 $ n $ 维向量空间和$ n\times m $ 阶实矩阵的集合; $ {\rm diag}\{R_i\}= {\rm diag}\{R_1,\;\cdots,\;R_N\} $表示块对角矩阵, 其中矩阵$ R_1,\;\cdots,\;R_N\in{\bf{R}}^{n\times n} $ 在该矩阵的对角线上; $ \varnothing $ 表示空集; $ \Vert\cdot\Vert $ 表示向量的$ 2 $ 范数; $ {\rm sign}(\cdot) $ 表示符号函数; $ |\cdot| $ 表示标量的绝对值; $ \otimes $ 表示Kronecker积; 给定向量函数$ \delta(t)=(\delta_1(t),\;\cdots,\;\delta_N(t))^{\mathrm{T}}\in{\bf{R}}^{N} $和常数$ \gamma > 0 $, 定义$ {\rm sig}\{\delta(t)\}^{\gamma} = (|\delta_1(t)|^{\gamma}{\rm sign}(\delta_1(t)),\; \cdots,$ $ |\delta_N(t)|^{\gamma}{\rm sign}(\delta_N(t)))^{\rm T} $; 给定对称矩阵$ Q\in{\bf{R}}^{m\times m} $, $ Q>{\bf{0}} $ 表示$ Q $ 是正定矩阵, $ \lambda_{\min}(Q),\; $ $ \lambda_{\max}(Q) $ 分别表示对称矩阵$ Q $ 的最小和最大特征值; $ I_n $ 表示$ n $ 维单位矩阵.
1. 预备知识和问题描述
1.1 代数图论
给定一个符号无向图$ {\cal{G}}=({\cal{I}},\; {\cal{E}},\; {\cal{A}}) $ 用以描述多无人艇系统的通信情况, 其中, $ {\cal{I}}=\{1,\; 2,\; \cdots,\; N\} $, $ {\cal{E}}=\{(i,\; j): i,\;j\in{\cal{I}}\} \subseteq{\cal{I}}\times{\cal{I}} $ 和$ {\cal{A}}=[a_{ij}]\in {\bf{R}}^{N\times N} $分别表示节点集、边集和符号邻接矩阵, 满足: 若$ (j,\;i)\in{\cal{E}} $ 则表示智能体$ i $可以接收到智能体 $ j $的信息, 否则表示不能接收到; 若$ i\neq j $ 且$ (j,\; i)\in{\cal{E}} $ 则$ a_{ij}\neq 0 $, 否则$ a_{ij}=0 $. 节点 $ i $ 的邻居集定义为$ {\cal{N}}_i=\{j: a_{ij}\neq 0\} $. 通信拓扑图的 Laplacian 矩阵定义为$ {\cal{L}}={\rm diag}\Big\{\sum\nolimits_{j\in{\cal{N}}_i}|a_{ij}|\Big\}-{\cal{A}} $. 给定一个包含$ N+1 $ 个节点的符号有向图$ {\cal{\bar{G}}}=({\cal{\bar{I}}},\;{\cal{\bar{E}}}) $, 其中, $ {\cal{\bar{I}}}= {\cal{I}}\cup\{0\} $; $ {\cal{\bar{E}}}\subseteq {\cal{I}} \times{\cal{I}} $; 节点0表示领航无人艇, 它仅向跟随无人艇传递信息而不接收信息. 牵引矩阵记为$ {\cal{B}}={\rm diag}\{b_i\} $, 满足: 若无人艇$ i $能接收到领航者的信息则$ b_i>0 $; 否则, $ b_i=0 $.
定义 1[23]. 若存在节点集的划分$ {\cal{I}}_1,\; {\cal{I}}_2 $ 满足: 1) $ {\cal{I}}_1\cup{\cal{I}}_2={\cal{I}} $; 2) $ {\cal{I}}_1\cap{\cal{I}}_2=\varnothing $; 3) 若$ i,\;j $ 同属于一个集合$ {\cal{I}}_1 $或$ {\cal{I}}_2 $, 则$ a_{ij}\geq 0 $, 否则$ a_{ij}\leq 0 $, 则符号图$ {\cal{G}} $被称作结构平衡的.
引入对角矩阵$ E={\rm diag}\{\varepsilon_i\} $, 其中, $ \varepsilon_i=1,\; i\in {\cal{I}}_1 $; $ \varepsilon_i=-1,\; i\in{\cal{I}}_2 $. 定义$ {\cal{\tilde{L}}}=E{\cal{L}}E $.
1.2 固定时间稳定性
定义2[24]. 给定如下非线性系统
$$ \dot{x}(t)=f(t,\;x(t)) $$ 式中, $ x(t)\in{\bf{R}}^n,\; f(t,\;x(t))\in{\bf{R}}^n $分别表示系统状态和局部 Lipschitz 连续函数. 若该系统的原点是全局渐进稳定的, 且存在与状态初值无关的时刻$ T $满足$ x(t)=0,\; \forall t\geq T $, 则称原点是固定时间稳定的.
引理 1[25]. 若存在常数$ c_1,\;c_2,\; m_1,\; m_2 $和连续径向无界标量函数$ {\cal{V}}(x(t)) $, 满足$ c_1>0,\; c_2>0 $, $ 0< m_1<1<m_2 $ 以及
$$ \dot{{\cal{V}}}(x(t))\leq -c_1{\cal{V}}^{m_1}(x(t))-c_2{\cal{V}}^{m_2}(x(t)) $$ 则原点是固定时间稳定的, 且稳定时间$ T_s $满足
$$ T_s\leq\frac{1}{c_1(1-m_1)}+\frac{1}{c_2(m_2-1)} $$ 进一步地, 若下式成立
$$ \dot{{\cal{V}}}(x(t))\leq -c_1{\cal{V}}^{m_1}(x(t))-c_2{\cal{V}}^{m_2}(x(t))+{\cal{C}} $$ 式中, $ {\cal{C}}>0 $为常参数, 则称原点是实用固定时间稳定的, 且稳定时间$ T_s $满足
$$ T_s\leq\frac{1}{c_1c(1-m_1)}+\frac{1}{c_2c(m_2-1)},\;\quad c\in(0,\;1) $$ 1.3 问题描述
考虑由$ N $艘无人艇组成的集群二分编队跟踪系统. 第$ i,\; i\in{\cal{I}} $艘跟随无人艇的运动学与动力学模型描述为[8]
$$ \dot{\eta}_i(t)=R(\psi_i(t))v_i(t) $$ (1) $$ M_i \dot{v}_i(t)=f_i(v_i(t))+\tau_i(t)+\phi_{i}(v_i(t))\Theta_i $$ (2) 式中, $ \eta_i(t)\;=\;(x_i(t),\; y_i(t),\; \psi_i(t))^{\rm T}\in{\bf{R}}^3 $, $ (x_i(t),\; y_i(t))^{\rm T}\in {\bf{R}}^2 $ 和$ \psi_i(t)\in{\bf{R}} $ 分别表示第$ i $艘无人艇在地面坐标系下的位置向量和偏航角; $ v_i(t)=(u_i^1(t),\; u_i^2(t),\; u_i^3(t))^{\rm T}\in{\bf{R}}^3 $表示第$ i $艘无人艇在体坐标系下的速度向量, $ u_i^1(t),\; u_i^2(t) $和$ u_i^3(t) $分别表示前向速度、横向速度和转向角速度; $ \tau_i(t)\in{\bf{R}}^3 $表示第$ i $艘无人艇的控制输入; $ R(\psi_i(t))\in{\bf{R}}^{3\times 3} $是转换矩阵, 形式如下
$$ R(\psi_i(t))= \left[\begin{array}{ccc} \cos(\psi_i(t))& -\sin(\psi_i(t))& 0\\ \sin(\psi_i(t))& \cos(\psi_i(t))& 0\\ 0 & 0 & 1 \end{array}\right] $$ $ f_i(v_i(t))=(f_{i1}(v_i(t)),\, f_{i2}(v_i(t)),\, f_{i3}(v_i(t)))^{\mathrm{T}}\in{\bf{R}}^{3} $ 是一个非线性向量函数; $M_i\in{\bf{R}}^{3\times 3}>{\bf{0}} $表示惯性矩阵; $ \phi_{i}(v_i(t))\Theta_i\in{\bf{R}}^{3} $表示参数不确定性, $ \phi_{i}(v_i(t))\in {\bf{R}}^{3\times m} $是已知的非线性函数, $ \Theta_i\in{\bf{R}}^{m} $是未知的常参数. 领航无人艇0的状态信号记为$ \eta_0(t)=(x_0(t),\; y_0(t),\; \psi_0(t))\in{\bf{R}}^3 $和$ v_0(t)\in{\bf{R}}^3 $.
期望编队向量记为$ h=(h_{1}^{\mathrm{T}},\;\cdots,\;h_{N}^{\mathrm{T}})^{\mathrm{T}}\in{\bf{R}}^{3N} $, 其中, $ h_{i}=(h_{i}^1,\;h_{i}^2,\;h_{i}^3)^{\mathrm{T}}\in{\bf{R}}^3,\; i\in{\cal{I}} $表示无人艇$ i $与领航无人艇$ 0 $之间期望的位置差. $ h_{i} $仅用于描述期望编队构型, 不用于为跟随无人艇提供参考轨迹. 本文的控制目标是: 设计一组分布式控制器, 使得遭受模型参数不确定性影响的多无人艇系统 (1) ~ (2) 实现固定时间二分编队跟踪, 即
$$ \lim_{t\rightarrow T_i}\Vert e_i(t) \Vert=0,\;\quad \forall i\in{\cal{I}} $$ 式中, $ T_i>0 $ 是一个常参数; $ e_i(t)=\eta_i(t)-h_i\;- \varepsilon_i\eta_0(t)\in{\bf{R}}^3 $ 是编队误差. 为设计控制器, 给出以下假设、引理和定义.
假设 1. 有向图$ {\cal{\bar{G}}} $ 具有有向生成树, $ 0 $是其根节点; 无向图$ {\cal{G}} $是连通的且结构平衡的.
假设 2. 参考轨迹$ \eta_0(t) $及其一阶导数$ \dot{\eta}_0(t) $是有界的, 即, 存在正常数$ \bar{\eta}_0\in {\bf{R}} $, 使得$ \Vert\eta_0(t)\Vert\leq \bar{\eta}_0 $和$ \Vert\dot{\eta}_0(t)\Vert\leq \bar{\eta}_0 $成立. 此外, $ \bar{\eta}_0 $仅部分和领航无人艇有通信的无人艇可知.
引理 2[26]. 给定标量函数$ z_1(t),\; \cdots,\; z_{\bar{\rho}}(t) $ 和常数$ \vartheta $, 以下不等式成立
$$ \left\{\begin{split} &\left(\sum_{\rho=1}^{\bar{\rho}} z_{\rho}(t)\right)^{\vartheta}\leq \sum_{\rho=1}^{\bar{\rho}}z_{\rho}^{\vartheta}(t),\;\quad 0 <\vartheta\leq 1\\ & \bar{\rho}^{1-\vartheta}\left(\sum_{\rho=1}^{\bar{\rho}} z_{\rho}(t)\right)^{\vartheta}\leq \sum_{\rho=1}^{\bar{\rho}}z_{\rho}^{\vartheta}(t),\; \quad \vartheta > 1 \end{split}\right. $$ 定义 3[27]. 给定一个矩阵函数$ \Delta(t)\in{\bf{R}}^{n\times m} $, 若存在常数$ \tilde{t},\; \mu $满足$ 0<\tilde{t}<t,\; \mu>0 $使$ \int_{t-\tilde{t}}^t\Delta^{\rm T} (\sigma)\;\times \Delta(\sigma) {\mathrm{d}}\sigma\geq \mu I_m,\; \forall t\geq 0 $ 成立, 则 $ \Delta(t) $ 被称作PE信号.
定义 4[27]. 给定一个矩阵函数$ \Delta(t)\in{\bf{R}}^{n\times m} $, 若存在常数$ \hat{t},\; \tilde{t},\; \mu $满足$ 0<\tilde{t}<\hat{t},\; \mu>0 $使$ \int_{\hat{t}-\tilde{t}}^{\hat{t}}\Delta^{\rm T} (\sigma) \times \; \Delta(\sigma){\mathrm{d}}\sigma\geq \mu I_m $成立, 则$ \Delta(t) $被称作IE信号.
注 1. 在分布式场景下, 无人艇$ i,\; i\in{\cal{I}} $仅能获得相对信息$ \eta_i(t)-{\rm sign}(a_{ij})\eta_j(t) $和 $ h_{ij}=h_i- {\rm sign} (a_{ij})h_j $; 部分与领航无人艇有通信连接的无人艇能获得全局信息$ \eta_0(t) $和$ h_i $.
注 2. 对比定义3和定义4, IE条件明显弱于PE条件.
2. 复合学习固定时间二分编队控制协议设计
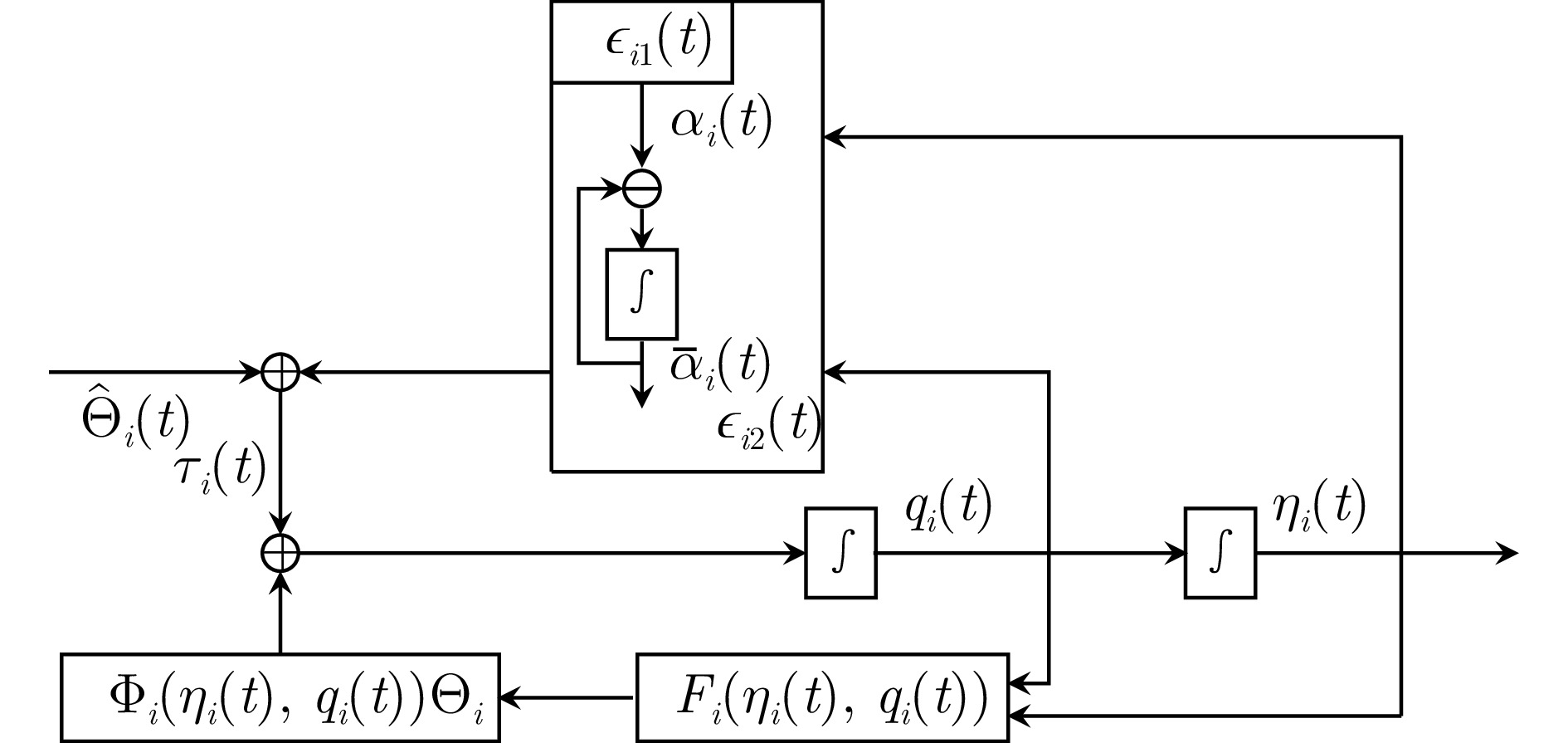
在本节中, 提出了一组复合学习固定时间二分编队控制协议, 图1中给出了控制程序和控制信号框图.
2.1 控制器设计
令$ q_i(t)=R(\psi_i(t))v_i(t) $, 则系统(1) ~ (2)可转化为
$$ \dot{\eta}_i(t)= q_i(t) $$ (3) $$ \begin{split} \dot{q}_i(t)=&\; F_i(\eta_i(t),\;q_i(t)) +g_i(\eta_i(t),\;q_i(t))\tau_i(t)\;+\\ & \Phi_{i}(\eta_i(t),\;q_i(t))\Theta_i \end{split} $$ (4) 式中, $ F_i(\eta_i(t),\,q_i(t))\;\;=\;\;R(\psi_i(t))M_i^{-1}f_i(v_i(t))\;+ \dot{R} (\psi_i(t)) v_i(t) $, $ g_i(\eta_i(t),\;q_i(t))\;\;=\;\;R(\psi_i(t))M_i^{-1} $ 以及$ \Phi_{i} (\eta_i(t),\; q_i(t))= R(\psi_i(t))M_i^{-1}\phi_{i}(v_i(t)) $.
对于第$ i,\; i\in{\cal{I}} $ 艘无人艇, 定义如下的局部跟踪误差信号
$$ \begin{split} \epsilon_{i1}(t)=&\;\sum\limits_{j\in{\cal{N}}_i}|a_{ij}|\left(\eta_i(t)-{\rm sign}(a_{ij})\eta_j(t)-h_{ij}\right)+\\ & b_i\left(\eta_i(t)-\varepsilon_i\eta_0(t)-h_i\right)\\[-1pt] \end{split} $$ (5) $$ \epsilon_{i2}(t)= q_i(t)-\bar{\alpha}_i(t) $$ (6) 式中, $ \alpha_i(t)\in{\bf{R}}^{3} $ 为虚拟控制输入, $ \bar{\alpha}_i(t)\in{\bf{R}}^{3} $ 为$ \alpha_i(t) $ 的命令滤波对应量, 其满足
$$ \dot{\bar{\alpha}}_i(t)=-w_i\tilde{\alpha}_i(t) $$ (7) 其中, $ \tilde{\alpha}_i(t)=\bar{\alpha}_i(t)-\alpha_i(t) $ 为滤波误差, $ w_i>0 $ 为常参数. 接下来, 介绍无人艇控制协议的具体设计程序.
步骤 1. 定义$ \epsilon_{1}(t)=(\epsilon_{11}^{\rm T}(t),\;\cdots,\;\epsilon_{N1}^{\rm T}(t))^{\rm T} $. 根据(3)、(5)和(6)可得
$$ \dot{\epsilon}_{1}(t)=\left(({\cal{L}}+{\cal{B}})\otimes I_3\right)\Xi(t)$$ (8) 式中, $ \Xi(t)= \begin{pmatrix} \epsilon_{12}(t)+\tilde{\alpha}_1(t)+\alpha_1(t)-\varepsilon_1\dot{\eta}_0(t)\\ \vdots\\ \epsilon_{N2}(t)+\tilde{\alpha}_N(t)+\alpha_N(t)-\varepsilon_N\dot{\eta}_0(t)\\ \end{pmatrix} . $虚拟控制输入设计为:
$$ \begin{split} \alpha_i(t)=\;&-\left(k_{i1}+\frac{1}{2}+\nu_i\right)\epsilon_{i1}(t)\;-\\ & \eta_{0i}(t)\frac{\epsilon_{i1}(t)}{\sqrt{\|\epsilon_{i1}(t)\|^2+\rho_i^2(t)}}\;-\\ & \sum_{l=1}^2c_l{\rm sig}\{\epsilon_{i1}(t)\}^{m_l} \end{split} $$ (9) 式中, $ k_{i1}>0,\; c_l>0,\; 0<m_1<1<m_2,\; \nu_i>0 $为待设计的常参数; $ \rho_i(t)\in{\bf{R}}>0 $满足$ \int_0^{+\infty}\rho_i(t){\mathrm{d}}t< +\infty $和$ |\rho_i(t)|\leq\bar{\rho}_i $; $ \eta_{0i}(t)\in{\bf{R}} $是对$ \bar{\eta}_0 $的估计, 根据下式更新:
$$ \dot{\eta}_{0i}(t)=-\sum_{l=1}^2c_l{\rm sig}\{\xi_i(t)\}^{m_l} $$ (10) 其中, $ \xi_i(t) = \sum\nolimits_{j\in {\cal{N}}_i}|a_{ij}|(\eta_{0i}(t)-\eta_{0j}(t))+b_i(\eta_{0i}(t)\;- \bar{\eta}_0) $.
将 (9) 代入 (8) 可得闭环误差系统
$$ \dot{\epsilon}_{1}(t)=\left(({\cal{L}}+{\cal{B}})\otimes I_3\right)\tilde{\Xi}(t) $$ (11) 式中
$$\begin{split} &\tilde{\Xi}(t)=\epsilon_{2}(t)+\tilde{\alpha}(t)-{\rm diag}\left\{\left(k_{i1}+\frac{1}{2}+ \nu_i\right)\otimes I_3\right\}\times \\ &\;\;\;\; \epsilon_{1}(t) - \begin{pmatrix} \displaystyle\frac{\eta_{01}(t)\epsilon_{11}(t)}{\sqrt{\|\epsilon_{11}(t)\|^2+\rho_1^2(t)}}+\varepsilon_1\dot{\eta}_0(t)\\\vdots\\ \displaystyle\frac{\eta_{0N}(t)\epsilon_{N1}(t)}{\sqrt{\|\epsilon_{N1}(t)\|^2+\rho_N^2(t)}}+\varepsilon_N\dot{\eta}_0(t)\\ \end{pmatrix} -\\ &\;\;\;\; \sum\limits_{l=1}^2c_l{\rm sig}\{\epsilon_{1}(t)\}^{m_l}\end{split} $$ 其中, $ \epsilon_{2}(t) = (\epsilon_{12}^{\rm T}(t),\;\cdots,\; \epsilon_{N2}^{\rm T}(t))^{\rm T}$和 $ \tilde{\alpha}(t) = (\tilde{\alpha}_1^{\rm T}(t),\; \cdots,\;\tilde{\alpha}_N^{\rm T}(t))^{\rm T} $.
选择如下的 Lyapunov 函数
$$ V_{1}(t)=\frac{1}{2}\epsilon_{1}^{\mathrm{T}}(t)\left(({\cal{L}}+{\cal{B}})\otimes I_3\right)^{-1}\epsilon_{1}(t) $$ 由 (11) 可推出
$$ \begin{split} \dot{V}_{1}(t) \leq\;& -\epsilon_{1}^{\mathrm{T}}(t){\rm diag}\left\{\left(k_{i1}+\nu_i\right)\otimes I_3\right\}\epsilon_{1}(t)\ +\\ & \frac{1}{2}\epsilon_{2}^{\mathrm{T}}(t)\epsilon_{2}(t) -\sum\limits_{l=1}^2c_l\epsilon_{1}^{\mathrm{T}}(t){\rm sig}\{\epsilon_{1}(t)\}^{m_l}\ -\\ & \sum\limits_{i=1}^N\frac{\tilde{\eta}_{0i}(t)\|\epsilon_{i1}(t)\|^2}{\sqrt{\|\epsilon_{i1}(t)\|^2+\rho_i^2(t)}} +\sum\limits_{i=1}^N\bar{\eta}_0\rho_i(t)\ +\\ & \epsilon_{1}^{\mathrm{T}}(t)\tilde{\alpha}(t)\\[-1pt] \end{split} $$ (12) 式中, $ \tilde{\eta}_{0i}(t)=\eta_{0i}(t)-\bar{\eta}_0 $ 表示参数估计误差. 定义全局参数估计误差$ \tilde{\eta}_{0}(t)=(\tilde{\eta}_{01}^{\rm T}(t),\;\cdots,\;\tilde{\eta}_{0N}^{\rm T}(t))^{\rm T} $.
步骤 2. 利用 (4)、(6) 和 (7) 可得
$$ \begin{split} \dot{\epsilon}_{i2}(t)=\;& g_i(\eta_i(t),\;q_i(t))\Big(g_i^{-1}(\eta_i(t),\;q_i(t))w_i\tilde{\alpha}_i(t)\ +\\ & \tau_i(t) +g_i^{-1}(\eta_i(t),\;q_i(t))\Phi_{i}(\eta_i(t),\;q_i(t))\Theta_i\ +\\ & g_i^{-1}(\eta_i(t),\;q_i(t))F_i(\eta_i(t),\;q_i(t))\Big)\\[-1pt] \end{split} $$ (13) 控制输入可以设计为
$$ \begin{split} \tau_i(t)=&\;-g_i^{-1}(\eta_i(t),\;q_i(t))\Big(\Big(k_{i2}+\frac{1}{2}\Big)\epsilon_{i2}(t)\ +\\ & F_i(\eta_i(t),\;q_i(t)) +\sum_{l=1}^2c_l{\rm sig}\{\epsilon_{i2}(t)\}^{m_l}\ +\\ & w_i\tilde{\alpha}_i(t) +\Phi_{i}(\eta_i(t),\;q_i(t))\hat{\Theta}_i(t)\Big)\end{split} $$ (14) 式中, $ k_{i2}>0 $为待设计的常参数, $ \hat{\Theta}_i(t)\in{\bf{R}}^{m} $是对$ \Theta_i $的估计.
将 (14) 代入 (13) 可得闭环误差系统
$$ \begin{split} \dot{\epsilon}_{i2}(t)=&-\left(k_{i2}+\frac{1}{2}\right)\epsilon_{i2}(t)-\Phi_{i}(\eta_i(t),\;q_i(t))\tilde{\Theta}_i(t)\ -\\ & \sum_{l=1}^2c_l{\rm sig}\{\epsilon_{i2}(t)\}^{m_l}\\[-1pt]\end{split} $$ (15) 式中, $ \tilde{\Theta}_i(t)=\hat{\Theta}_i(t)-\Theta_i $ 为参数估计误差.
为了自适应地估计未知参数$ \Theta_i $, 给出滤波信号$ q_{i}^{f}(t)\in{\bf{R}}^3,\; H_{i}^{f}(t)\in{\bf{R}}^3,\; \Phi_{i}^{f}(t)\in{\bf{R}}^{3\times m} $和辅助变量$ \Lambda_i(t)\in{\bf{R}}^{m\times m},\; \Upsilon_i(t)\in{\bf{R}}^{m} $, 其按下式更新
$$ \left\{ \begin{array}{l} \beta_i\dot{q}_{i}^{f}(t)+q_{i}^{f}(t)=q_i(t)\\ \beta_i\dot{H}_{i}^{f}(t)+H_{i}^{f}(t)= H_{i}(t) \\ \beta_i\dot{\Phi}_{i}^{f}(t)+\Phi_{i}^{f}(t)=\Phi_{i}(\eta_i(t),\;q_i(t)) \end{array}\right. $$ (16) $$ \left\{\begin{split} &\Lambda_{i}(t)=\int_{t-o_i}^t\Phi_{i}^{f{\mathrm{T}}}(\sigma)\Phi_{i}^{f}(\sigma){\mathrm{d}}\sigma\\ &\Upsilon_{i}(t)=\int_{t-o_i}^t\Phi_{i}^{f{\mathrm{T}}}(\sigma) \left(\frac{q_{i}(\sigma)- q_{i}^{f}(\sigma)} {\beta_i}-H_{i}^{f}(\sigma)\right){\mathrm{d}}\sigma \end{split}\right. $$ (17) 式中, $ \beta_i>0 $, $ t>o_i\geq0 $是常数, $ H_{i}(t)\;=\;F_i (\eta_i(t), q_i(t))+g_i(\eta_i(t),\;q_i(t))\tau_i(t) $. 联立 (4)、(16) 和 (17) 可得
$$ \Lambda_{i}(t)\Theta_{i}=\Upsilon_{i}(t) $$ (18) 定义如下的预测误差函数$ {\cal{P}}_i(t)\in{\bf{R}}^{m} $:
$$ \begin{aligned} {\cal{P}}_i(t)= \begin{cases} \Lambda_{i}(t)\hat{\Theta}_i(t),\;& t<p_i\;\\ \Lambda_{i}(p_i)\hat{\Theta}_i(t)-\Upsilon_{i}(p_i),\;& t\geq p_i\; \end{cases} \end{aligned} $$ (19) 式中, $ p_i $是矩阵$ \Lambda_{i}(t)>{\bf{0}} $的时刻. 参数估计$ \hat{\Theta}_i(t) $的更新律设计如下:
$$ \begin{split} \dot{\hat{\Theta}}_i(t)=\ &\Gamma_i\Phi_{i}^{\mathrm{T}}(\eta_i(t),\;q_i(t))\epsilon_{i2}(t)\ -\\ & \Gamma_i\Lambda_{i}^{\mathrm{T}}(t)\sum_{l=1}^2c_l{\rm sig}\{{\cal{P}}_i(t)\}^{m_l} \end{split} $$ (20) 式中, $ \Gamma_i\in{\bf{R}}^{m\times m}>{\bf{0}} $ 代表参数学习率.
选择如下的 Lyapunov 函数:
$$ V_{2}(t)=\frac{1}{2}\epsilon_{2}^{\mathrm{T}}(t)\epsilon_{2}(t)+\frac{1}{2}\sum_{i=1}^N\tilde{\Theta}_i^{\mathrm{T}}(t)\Gamma_i^{-1}\tilde{\Theta}_i(t) $$ 根据 (15) 和 (20), 对于$ t\geq \max _{i\in{\cal{I}}}\{p_i\} $有
$$ \begin{split} \dot{V}_{2}(t)=\ &-\epsilon_{2}^{\rm T}(t){\rm diag}\left\{\left(k_{i2}+\frac{1}{2}\right)\otimes I_3\right\}\epsilon_{2}(t)\ -\\& \sum_{l=1}^2c_l\epsilon_{2}^{\rm T}(t){\rm sig}\{\epsilon_{2}(t)\}^{m_l}\ -\\& \sum_{l=1}^2c_l{\cal{P}}^{\rm T}(t){\rm sig}\{{\cal{P}}(t)\}^{m_l}\\[-1pt] \end{split} $$ (21) 式中, $ {\cal{P}}(t)=({\cal{P}}_1^{\rm T}(t),\;\cdots,\;{\cal{P}}_N^{\rm T}(t))^{\rm T} $.
注 3. 由 (5) 可推出, $ \epsilon_{1}(t)=(({\cal{L}}+{\cal{B}})\otimes I_3)e(t) $, 其中, $ e(t)=(e_1^{\rm T}(t),\;\cdots,\;e_N^{\rm T}(t))^{\mathrm{T}} $. 此外, 在假设1满足时, 有$ {\cal{L}}+{\cal{B}}>{\bf{0}} $和$ {\cal{\tilde{L}}}+{\cal{B}}>{\bf{0}} $成立.
2.2 稳定性分析
在给出最终稳定性结果之前, 首先给出如下引理.
引理 3. 在假设1和假设2满足时, 全局参数估计误差$ \tilde{\eta}_{0}(t) $在固定时间内收敛到零, 收敛时间$ T_{\eta} $满足$ T_{\eta}\leq\frac{1}{\kappa_1(1-\iota_1)}+\frac{1}{\kappa_2(\iota_2-1)} $.
证明. 根据 (10) 有
$$ \dot{\tilde{\eta}}_{0}(t)=-\sum_{l=1}^2c_l{\rm sig}\{(({\cal{\tilde{L}}}+{\cal{B}})\otimes I_3)\tilde{\eta}_{0}(t)\}^{m_l}$$ (22) 选择如下的 Lyapunov 函数
$$ L(t)=\frac{1}{2}\tilde{\eta}_{0}^{\rm T}(t)(({\cal{\tilde{L}}}+{\cal{B}})\otimes I_3)\tilde{\eta}_{0}(t)$$ (23) 由 (22) 可推出
$$ \dot{L}(t)=-\kappa_1L^{\iota_1}(t)-\kappa_2L^{\iota_2}(t) $$ (24) 式中, $ \iota_1 = \frac{1+m_1}{2},\; \iota_2 = \frac{1+m_2}{2},\; \kappa_1 = c_1(2\lambda_{\min}({\cal{\tilde{L}}} + {\cal{B}}))^{\iota_1},\; \kappa_2=c_2(2\lambda_{\min}({\cal{\tilde{L}}}+{\cal{B}}))^{\iota_2}(3N)^{1-\iota_2} $. 根据引理1可知, $ \tilde{\eta}_{0}(t) $固定时间收敛到零, 收敛时间 $ T_{\eta} $满足$ T_{\eta}\leq \frac{1}{\kappa_1(1-\iota_1)}+\frac{1}{\kappa_2(\iota_2-1)} $. 因此, 存在时刻$ \tilde{t}\geq T_{\eta} $有$ \tilde{\eta}_{0}(t)= {\bf{0}},\; \forall t\geq \tilde{t} $.
□ 注 4. 在实际情形下, 无人艇系统状态信号$ \eta_i(t),\; $$ \eta_0(t) $是有界的; 根据假设2, 信号$ \dot{\eta}_0(t) $也是有界的. 因此, 根据 (5) 可推出$ \epsilon_{i1}(t) $是有界的. 此外, 根据引理3可知, $ \eta_{0i}(t) $是有界的. 综上, 由 (9) 可推断出$ \alpha_i(t) $是有界的. 注意, 如果$ \alpha_i(t) $是有界的, 那么$ \tilde{\alpha}_i(t) $是有界的. 在此情况下, 存在常数$ \check{\alpha}_i>0 $使得$ \Vert\tilde{\alpha}_i(t)\Vert\leq\check{\alpha}_i $.
定理1给出了本文的稳定性结果.
定理 1. 在假设1和假设2满足时, 多无人艇系统 (3) ~ (4) 在控制协议 (14) 和参数自适应律 (20) 的驱动下可以实现实用固定时间二分编队跟踪控制, 收敛时间$ T_{{\cal{P}}} $满足$ T_{{\cal{P}}}\leq\max_{i\in{\cal{I}}}\;\{\;\tilde{t},\;p_i\;\}\ + \frac{1}{\bar{\kappa}_1c(1-\bar{\iota}_1)}+\frac{1}{\bar{\kappa}_2c(\bar{\iota}_2-1)} $.
证明. 选择如下的 Lyapunov 函数$ V(t)= V_{1}(t) + \; V_{2}(t) $. 根据 (12) 和 (21), 对于$ t\;\geq\; \max_{i\in{\cal{I}}} \{\tilde{t}, p_i\}, \nu_i\geq o_i $ 有
$$ \begin{split} \dot{V}(t) \leq\;&\ \epsilon_{1}^{\rm T}(t)\tilde{\alpha}(t) -\sum\limits_{l=1}^2c_l\epsilon_{1}^{\rm T}(t){\rm sig}\{\epsilon_{1}(t)\}^{m_l}\ -\\ & \epsilon_{1}^{\rm T}(t){\rm diag}\left\{\nu_i\otimes I_3\right\}\epsilon_{1}(t) +\sum\limits_{i=1}^N\bar{\eta}_0\rho_i(t)\ -\\ & \sum_{l=1}^2c_l\epsilon_{2}^{\rm T}(t){\rm sig}\{\epsilon_{2}(t)\}^{m_l}\ -\\ & \sum_{l=1}^2c_l{\cal{P}}^{\rm T}(t){\rm sig}\{{\cal{P}}(t)\}^{m_l}\leq\\ & -\sum_{l=1}^2c_l\epsilon_{{\cal{P}}}^{\rm T}(t){\rm sig}\{\epsilon_{{\cal{P}}}(t)\}^{m_l}+\iota \end{split} $$ 式中, $ \epsilon_{{\cal{P}}}(t) = (\epsilon_{1}^{\rm T}(t),\;\epsilon_{2}^{\rm T}(t),\; {\cal{P}}^{\rm T}(t))^{\rm T} $, $ \iota = \sum\nolimits_{i=1}^N\frac{1}{4o_i}\check{\alpha}_i^2 + \; \sum\nolimits_{i=1}^N\bar{\eta}_0\bar{\rho}_i $, $ o_i>0 $是合适的常参数, 通过选取$ o_i $和$ \rho_i(t) $可以使残差集任意小. 因为对于$ t\;\geq \;\max _{i\in{\cal{I}}} \{\tilde{t}, p_i\} $有
$$ \zeta_1\epsilon_{{\cal{P}}}^{\rm T}(t)\epsilon_{{\cal{P}}}(t)\leq V(t) \leq\zeta_2\epsilon_{{\cal{P}}}^{\rm T}(t)\epsilon_{{\cal{P}}}(t) $$ 式中, $ \zeta_1=\min\limits_{i\in{\cal{I}}}\left\{\frac{1}{2},\;\frac{1}{2\lambda_{\min}\left(\Lambda_{i}^{\mathrm{T}}(t)\Gamma_i\Lambda_{i}(t)\right)},\;\frac{1}{2\lambda_{\max}\left({\cal{L}}+{\cal{B}}\right)}\right\},\; $ $ \zeta_2=\min\limits_{i\in{\cal{I}}}\left\{\frac{1}{2},\;\frac{1}{2\lambda_{\max}\left(\Lambda_{i}^{\mathrm{T}}(t)\Gamma_i\Lambda_{i}(t)\right)},\;\frac{1}{2\lambda_{\min}\left({\cal{L}}+{\cal{B}}\right)}\right\} $. 因此, 根据引理2可以推断出
$$ \begin{split} &-c_1\epsilon_{{\cal{P}}}^{\rm T}(t){\rm sig}\{\epsilon_{{\cal{P}}}(t)\}^{m_1} \leq -\bar{\kappa}_1V^{\bar{\iota}_1}(t)\\ & -c_2\epsilon_{{\cal{P}}}^{\rm T}(t){\rm sig}\{\epsilon_{{\cal{P}}}(t)\}^{m_2} \leq -\bar{\kappa}_2V^{\bar{\iota}_2}(t) \end{split} $$ 式中, $ \bar{\iota}_1 = \frac{m_1+1}{2},\; \bar{\kappa}_1=c_1\left(\frac{1}{\zeta_2}\right)^{\bar{\iota}_1},\; \bar{\iota}_2 = \frac{m_2+1}{2} $ 和$ \bar{\kappa}_2= c_2((6+m)N)^{1-\bar{\iota}_2}\left(\frac{1}{\zeta_2}\right)^{\bar{\iota}_2} $. 进一步有
$$ \dot{V}(t) \leq -\sum_{l=1}^2\bar{\kappa}_lV^{\bar{\iota}_l}(t)+\iota,\;\quad t\geq \max\limits_{i\in{\cal{I}}}\{\tilde{t},\;p_i\} $$ 根据引理1可知, 误差向量$ \epsilon_1(t),\; \epsilon_2(t),\; {\cal{P}}(t) $固定时间收敛到原点的任意小邻域, 收敛时间$ T_{{\cal{P}}} $满足$ T_{{\cal{P}}}\leq\max_{i\in{\cal{I}}}\{\tilde{t},\;p_i\}+\frac{1}{\bar{\kappa}_1c(1-\bar{\iota}_1)}+\frac{1}{\bar{\kappa}_2c(\bar{\iota}_2-1)} $. 根据 (19), 当$ t\geq \max_{i\in{\cal{I}}}\{\tilde{t},\;p_i\} $时, 有$ {\cal{P}}_i(t)=\Lambda_i(p_i)\tilde{\Theta}_i(t) $且$ \Lambda_i(p_i) $可逆. 因此, 参数估计误差$ \tilde{\Theta}_i(t),\; i\in{\cal{I}} $也固定时间收敛到原点的任意小邻域. 综上, 多无人艇系统 (3) ~ (4) 在控制协议 (14) 和参数自适应律 (20) 的驱动下可以实现实用固定时间二分编队跟踪控制.
□ 注 5. 根据定理1可知, 所设计的控制器不仅能使得误差信号$ \epsilon_{i1}(t),\; \epsilon_{i2}(t),\; i\in{\cal{I}} $ 固定时间收敛到原点的任意小邻域, 而且能使得参数估计误差$ \tilde{\Theta}_i(t) $ 收敛到零的任意小邻域.
注 6. 根据 (18) 可知, 通过引入滤波信号$ q_{i}^{f}(t)$, $ H_{i}^{f}(t) $, $ \Phi_{i}^{f}(t) $ 和辅助变量$ \Lambda_i(t) $, $ \Upsilon_i(t) $, 并联立 (4) 可以推导出$ \Theta_{i} $ 与$ \Lambda_{i}(t),\; \Upsilon_{i}(t) $ 的关系. 进一步地, 可以构建包含$ \tilde{\Theta}_i(t) $ 的参数更新律 (20). 此外, 由定理1的证明过程可知, 当参数更新律设计为 (20) 且信号$ \Lambda_{i}(t) $ 满足较弱的 IE 条件时, 参数估计误差的收敛性可以确保.
3. 仿真实验
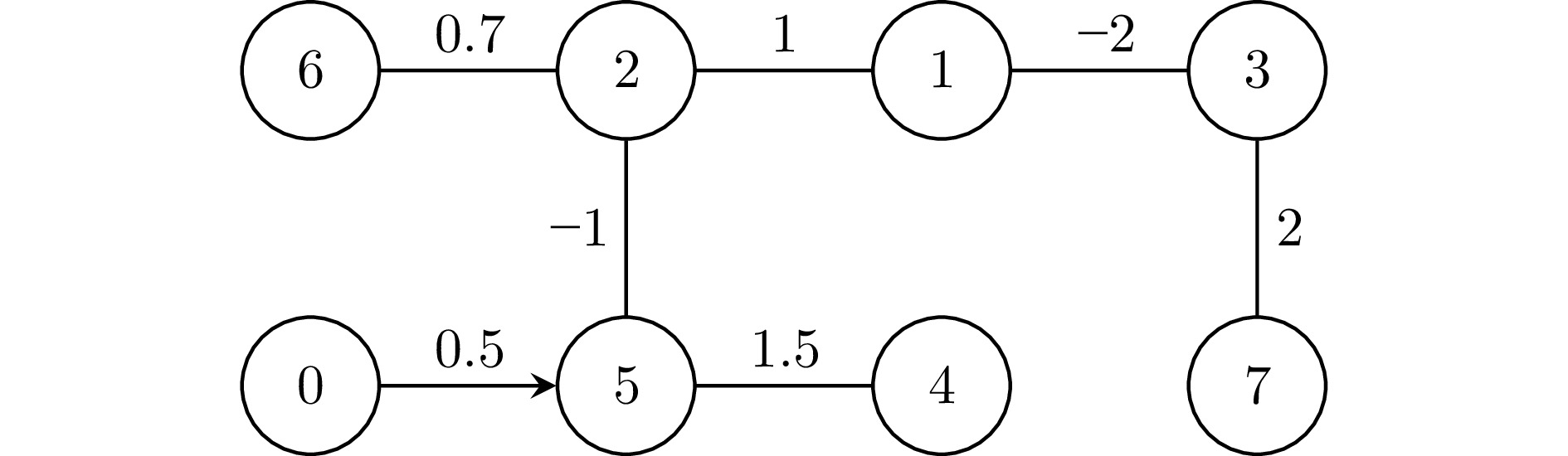
本节给出一个仿真实例以验证提出的控制协议的可行性. 考虑一个无人艇二分编队集群, 包含$ 7 $ 艘跟随无人艇和$ 1 $ 艘领航无人艇. 无人艇间的通信互动在图2中描述, 且$ E={\rm diag}\{1,\;1,\;-1,\; -1,\;-1,\; 1,\;-1\} $. 期望编队构型如下所示:
$$ \begin{split} &h_{1}=(1,\;1,\;0)^{\rm T},\;\ \ \qquad h_{2}=(3,\;1,\;0)^{\rm T},\;\\ & h_{3}=(-1,\;-1,\;0)^{\rm T},\;\quad h_{4}=(-3,\;-1,\;0)^{\rm T},\;\\ & h_{5}=(-3,\;-3,\;0)^{\rm T},\;\quad h_{6}=(2,\;3,\;0)^{\rm T},\;\\ & h_{7}=(-1,\;-3,\;0)^{\rm T} \end{split} $$ 跟随无人艇$ i,\; i=1,\;2,\;\cdots,\;7 $的动力学信息如下所示:
$$ \begin{split} &M_i= \left[\begin{array}{ccc} 26&0&0\\ 0&34&1.1\\ 0&1.1&2.8 \end{array}\right]\\& f_i(v_i(t))=-C_i(v_i(t))-D_i(v_i(t)) \end{split} $$ 式中,
$$ C_i(v_i(t))= \left[\begin{array}{c} C_i^{1}(v_i(t))u_i^3(t)\\ C_i^{2}(v_i(t))u_i^3(t)\\ -C_i^{1}(v_i(t))u_i^1(t)-C_i^{2}(v_i(t))u_i^2(t) \end{array} \right]$$ $$ D_i(v_i(t))= \left[\begin{array}{c} D_i^1(v_i(t))u_i^1(t)\\ D_i^2(v_i(t))u_i^2(t)+D_i^3(v_i(t))u_i^3(t)\\ D_i^4(v_i(t))u_i^2(t)+D_i^5(v_i(t))u_i^3(t) \end{array}\right] $$ $$ C_i^{1}(v_i(t))=-34u_i^2(t)-1.1u_i^3(t) $$ $$ C_i^{2}(v_i(t))=26u_i^1(t)$$ $$ D_i^{1}(v_i(t))=0.73+1.33|u_i^1(t)|+5.87(u_i^1(t))^2 $$ $$ D_i^{2}(v_i(t))=0.86+36.3|u_i^2(t)|+8.1|u_i^3(t)| $$ $$ D_i^{3}(v_i(t))=-0.11+0.85|u_i^2(t)|+3.5|u_i^3(t)| $$ $$ D_i^{4}(v_i(t))=-0.11-5.1|u_i^2(t)|-0.13|u_i^3(t)| $$ $$ D_i^{5}(v_i(t))=-1.9-0.1|u_i^2(t)|+0.75|u^3_i(t)| $$ 未知参数设置为$ \Theta_1=(1,\; 1.5,\; 5)^{\rm T},\; \Theta_2=(2.5,\; 3 ,$ $3.5)^{\rm T},\; \Theta_3\;=\;(0.5,\; 1.0,\; 8)^{\rm T},\; $ $ \Theta_4\;=\;(3.7,\; $ $ 3.7,\; $ $ 6)^{\rm T}, $ $ \Theta_5\;=\;-(0.7,\; $ $ 0.8,\; $ $ 5)^{\rm T},\; $ $ \Theta_6\;=\;-(1.1,\; $ $ 2.1,\; $ $ 7)^{\rm T} $和$ \Theta_7\;=\;-(2,\; $ $ 3,\; $ $ 6)^{\rm T} $. 已知函数选取为$ \phi_{i}\;(v_i\;(t))= \begin{pmatrix}\phi_{i}^{1}(v_i(t))& 0 &\phi_{i}^{2}(v_i(t))\\ 0& \phi_{i}^{3}(v_i(t)) &0\\ 0& 0 &\phi_{i}^{4}(v_i(t))\end{pmatrix}. $ 式中, $ \phi_{i}^{1}(v_i(t))= $ $\sin(u_i^1(t))\cos(1.5u_i^2(t)) + 2 $, $ \phi_{i}^{2}(v_i(t)) = ||\sin^{\rm T}(v_i(t))\;\times $$ \sin(v_i(t))|| $, $ \phi_{i}^{3}(v_i(t)) $ $ =\,\sin(2u_i^2(t))\cos(u_i^3(t))+2 $ 和$ \phi_{i}^{4}(v_i(t))= $ $ \sin(0.2u_i^1(t))\cos(0.2u_i^3(t))+2 $.
领航无人艇参考轨迹如下:
$$ \eta_0(t)= \left[\begin{array}{c} 3\sin(0.025\pi t)\\ 2\sin(0.05\pi t)\\ \pi\cos(0.02\pi t) \end{array}\right]$$ 无人艇系统状态初始值设置为$ \eta_1(0)\,=\,5(-1, -2.1,\;1.3)^{\rm T} $, $ v_1(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_2(0)\,=\,0.1(-1, -2.1,\;1.3)^{\rm T} $, $ v_2(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_3(0)\,=\,(-1, -2.1,\;1.3)^{\rm T} $, $ v_3(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_4(0) $ $ =\;(-1, -2.1,\;1.3)^{\rm T} $, $ v_4(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_5(0)\,=\,(-1, -2.1,\; 1.3)^{\rm T} $, $ v_5(0)\,=\,3(1,\;2,\;-1.3)^{\rm T} $, $ \eta_6(0)\,=\,10(-1, -2.1,\;1.3)^{\rm T} $, $ v_6(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $, $ \eta_7(0)\,=\,(-1, -2.1,\;1.3)^{\rm T} $ 和$ v_7(0)\,=\,(1,\;2,\;-1.3)^{\rm T} $. 参数估计初值选取为$ \eta_{01}(t)=4 $, $ \eta_{02}(t)=5 $, $ \eta_{03}(t)\,=\,6 $, $ \eta_{04}(t)\,=\, 7 $, $ \eta_{05}(t)\,=\,8 $, $ \eta_{06}(t)\,=\,9 $, $ \eta_{07}(t)\,=\,10 $, $ \hat{\Theta}_1(0)\,=\,(6, $ $ 6 $, $ 9)^{\rm T} $, $ \hat{\Theta}_2(0)\,=\,(7.5 $, $ 13.5 $, $ 7.5)^{\rm T} $, $ \hat{\Theta}_3(0)\,=\, (9.9 $, $ 5.1 $, $ 6.9)^{\rm T} $, $ \hat{\Theta}_4(0)\;=\;3(-4.1 $, $ -2.2 $, $ -3.7)^{\rm T} $, $ \hat{\Theta}_5(0)\,=\, 3(-3.5 $, $ 2.7 $, $ 0.7)^{\rm T} $, $ \hat{\Theta}_6(0)\,=\,3(7.1 $, $ 5 $, $ -1.7)^{\rm T} $ 和$ \hat{\Theta}_7(0)\,=\,3(1.3 $, $ 7.2 $, $ 1.7)^{\rm T} $. 命令滤波对应量的初始值设置为$ \bar{\alpha}_i(0)\,=\,i(0.5,\;1,\;0.75)^{\rm T} $. 控制器参数选取为$ c_1=c_2=10,\; m_1=0.5,\; m_2 = 1.5,\; w_i=1.6,\; k_{i1}= k_{i2}=25 $ 和$ \beta_i=0.1 $.
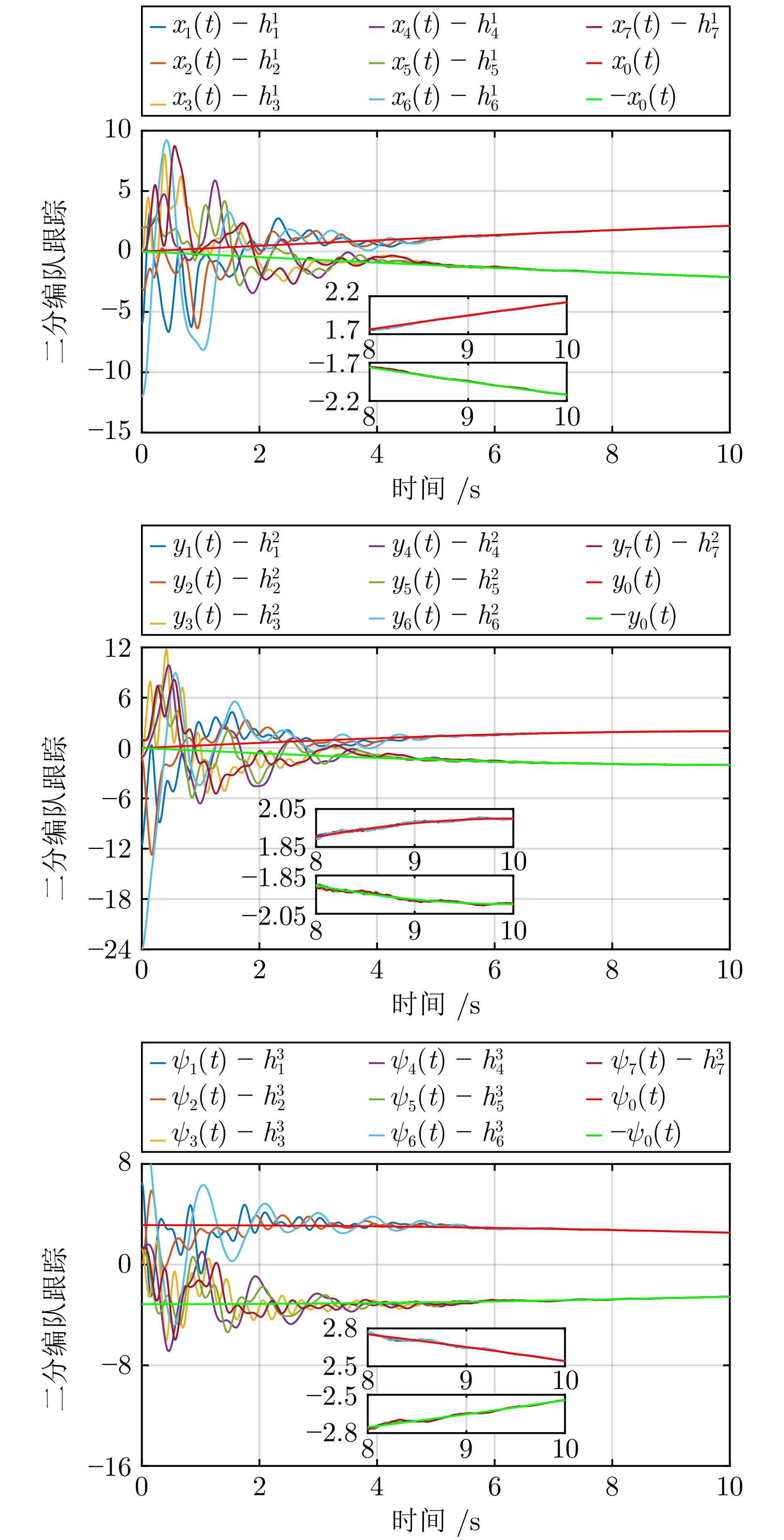
记$ \epsilon_{i1}(t) = (\epsilon_{i1}^1(t),\,\epsilon_{i1}^2(t),\,\epsilon_{i1}^3(t))^{\rm T}, $ $ \epsilon_{i2}(t) = $ $ (\epsilon_{i2}^1(t),\, \epsilon_{i2}^2(t),\,\epsilon_{i2}^3(t))^{\rm T}, $ $ \Theta_i = (\Theta_i^1,\,\Theta_i^2,\,\Theta_i^3)^{\rm T} $ 和$ \hat{\Theta}_i\,(t) = $ $(\hat{\Theta}_i^1(t), \hat{\Theta}_i^2(t) $, $ \hat{\Theta}_i^3(t))^{\rm T} $. 参数估计误差轨迹分别在图3和图4中描述. 观察图3和图4可知, 参数估计误差信号$ \tilde{\eta}_{0i}(t),\, i = 1,\,2,\,\cdots,\,7 $ 在 2 ($ 2 < \frac{1}{\kappa_1(1-\iota_1)} + \frac{1}{\kappa_2(\iota_2-1)} = 17.73 $) s内收敛到零; 参数估计误差信号$ \tilde{\Theta}_{i}(t), i=1,\;2,\;\cdots,\;7 $ 在 4 ($ 4 < \frac{1}{\bar{\kappa}_1c(1-\bar{\iota}_1)} + \frac{1}{\bar{\kappa}_2c(\bar{\iota}_2-1)} > 26.1 $) s内收敛到零的小邻域. 局部跟踪误差轨迹$ \epsilon_{i1}(t), \epsilon_{i2}(t),\; i=1,\;2,\;\cdots,\;7 $ 在图5中给出, 它们在5 ($ 5< 26.1 $) s内收敛到零的小邻域. 图6揭示了在提出的控制协议下, 多无人艇系统可实现固定时间二分编队跟踪控制.
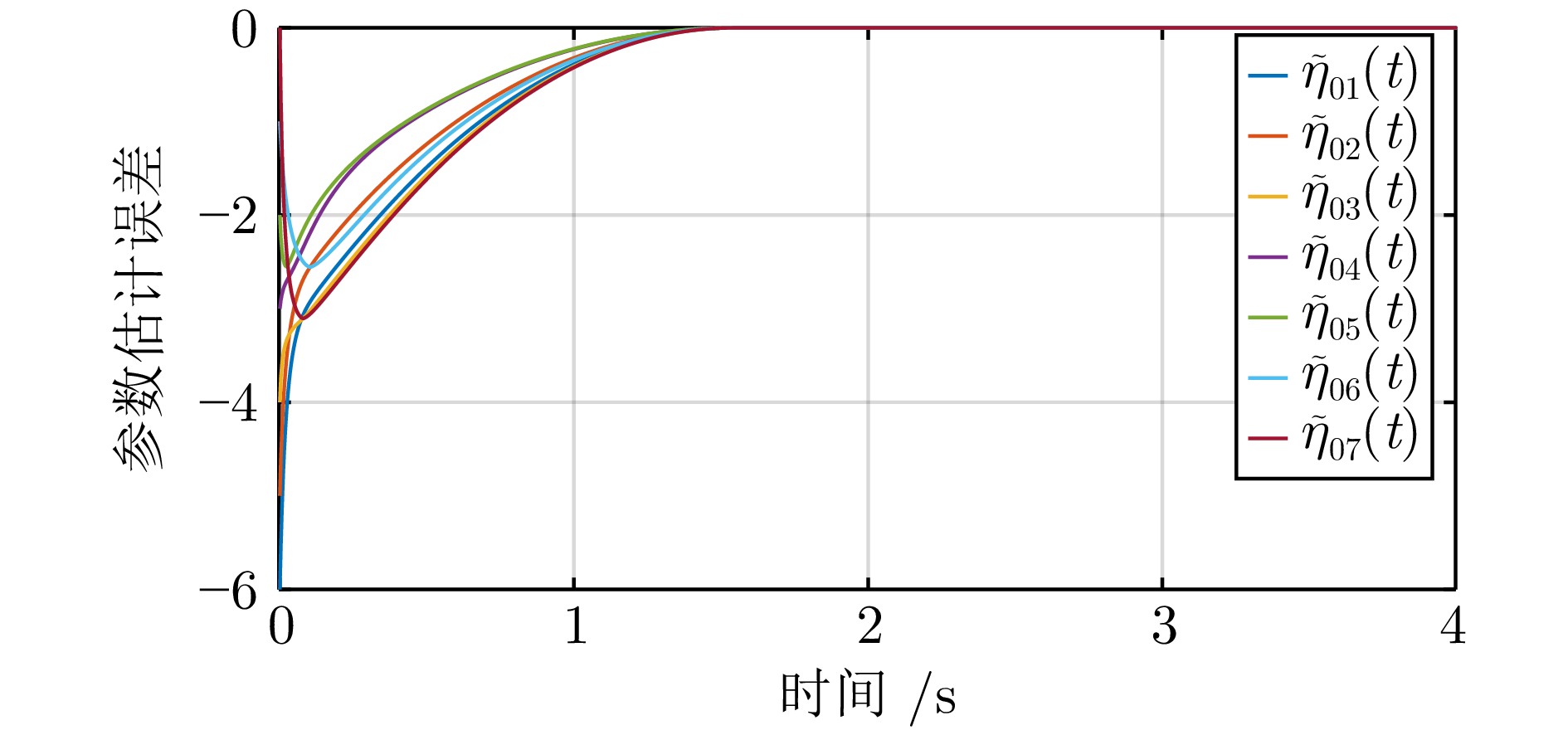 图 3 参数估计误差 $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 3 Parameter estimation errors $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$
图 3 参数估计误差 $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 3 Parameter estimation errors $\tilde{\eta}_{0i}(t),\; i=1,\;2,\;\cdots,\;7$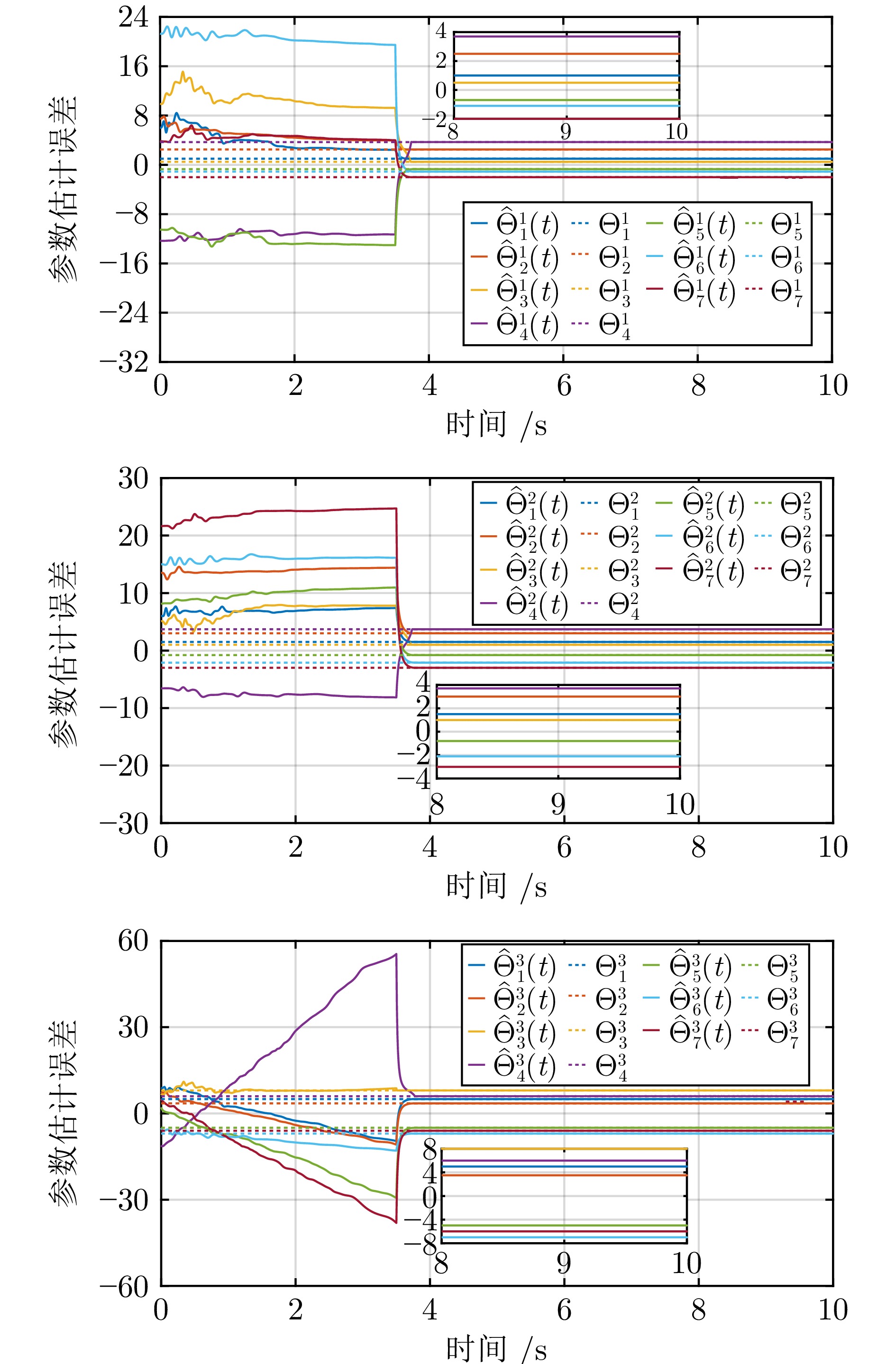 图 4 参数估计误差$\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 4 Parameter estimation errors $\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$
图 4 参数估计误差$\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 4 Parameter estimation errors $\tilde{\Theta}_{i}(t),\; i=1,\;2,\;\cdots,\;7$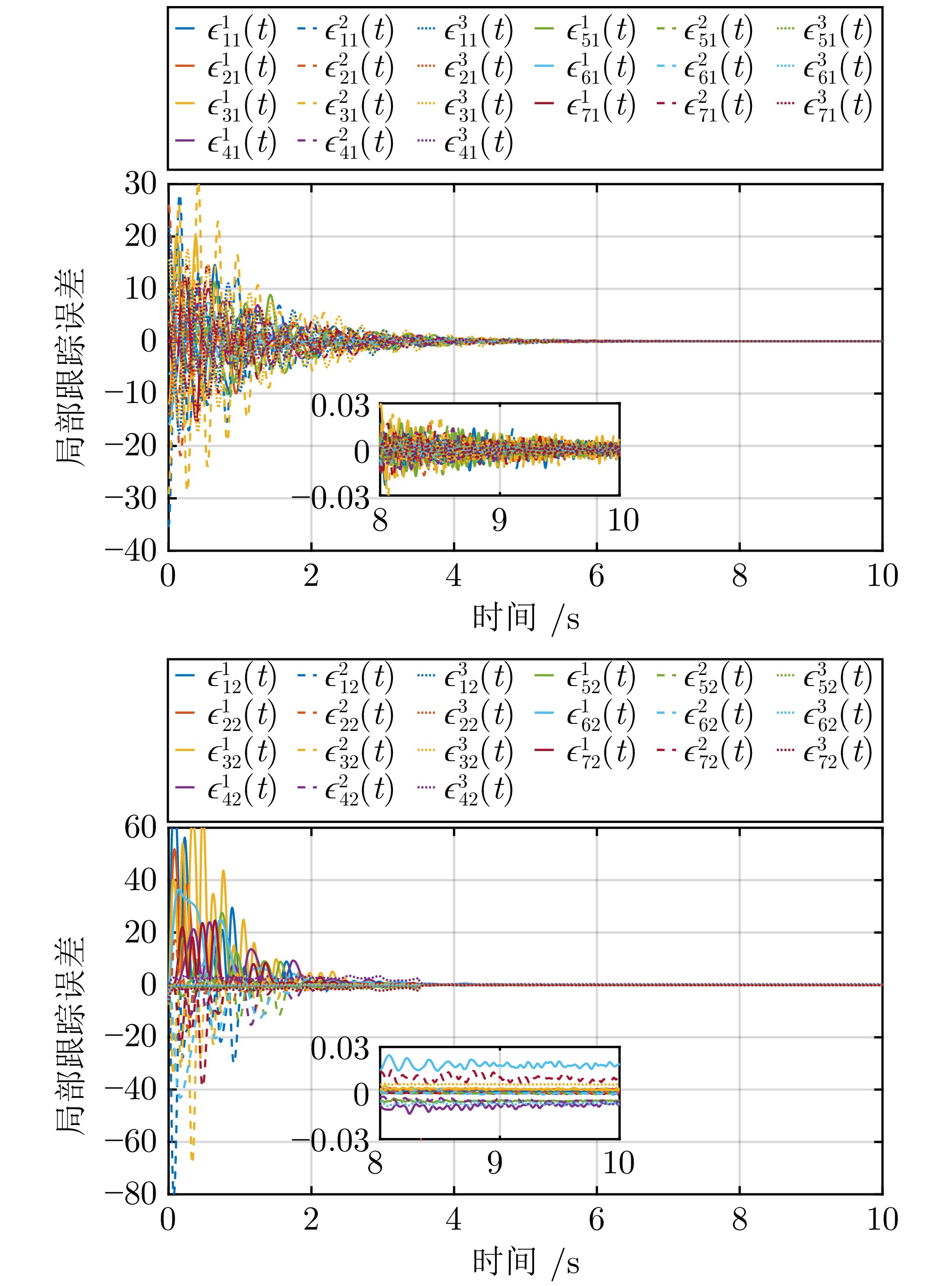 图 5 局部跟踪误差$\epsilon_{i1}(t),\; \epsilon_{i2}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 5 Local tracking errors $\epsilon_{i1}(t),\;$ $\epsilon_{i2}(t),\;$ $i=1,\;2,\;\cdots,\;7$
图 5 局部跟踪误差$\epsilon_{i1}(t),\; \epsilon_{i2}(t),\; i=1,\;2,\;\cdots,\;7$Fig. 5 Local tracking errors $\epsilon_{i1}(t),\;$ $\epsilon_{i2}(t),\;$ $i=1,\;2,\;\cdots,\;7$4. 结束语
通过设计基于命令滤波与复合学习的反推控制协议, 解决了模型参数不确定下多无人艇系统的固定时间二分编队跟踪控制问题. 与已有的相关工作相比, 本文具有以下优势: 通过引入命令滤波技术, 提出的控制协议避免了计算虚拟控制输入的导数, 极大地简化了分布式控制器的设计; 通过引入复合学习技术, 在不需要 PE 条件的情况下, 保证了跟踪误差和参数估计误差的固定时间收敛性. 未来主要关注有向符号图下具有时变参数不确定性影响的多无人艇系统固定时间分布式控制问题, 以及多无人机−无人艇跨域协同控制问题.
-
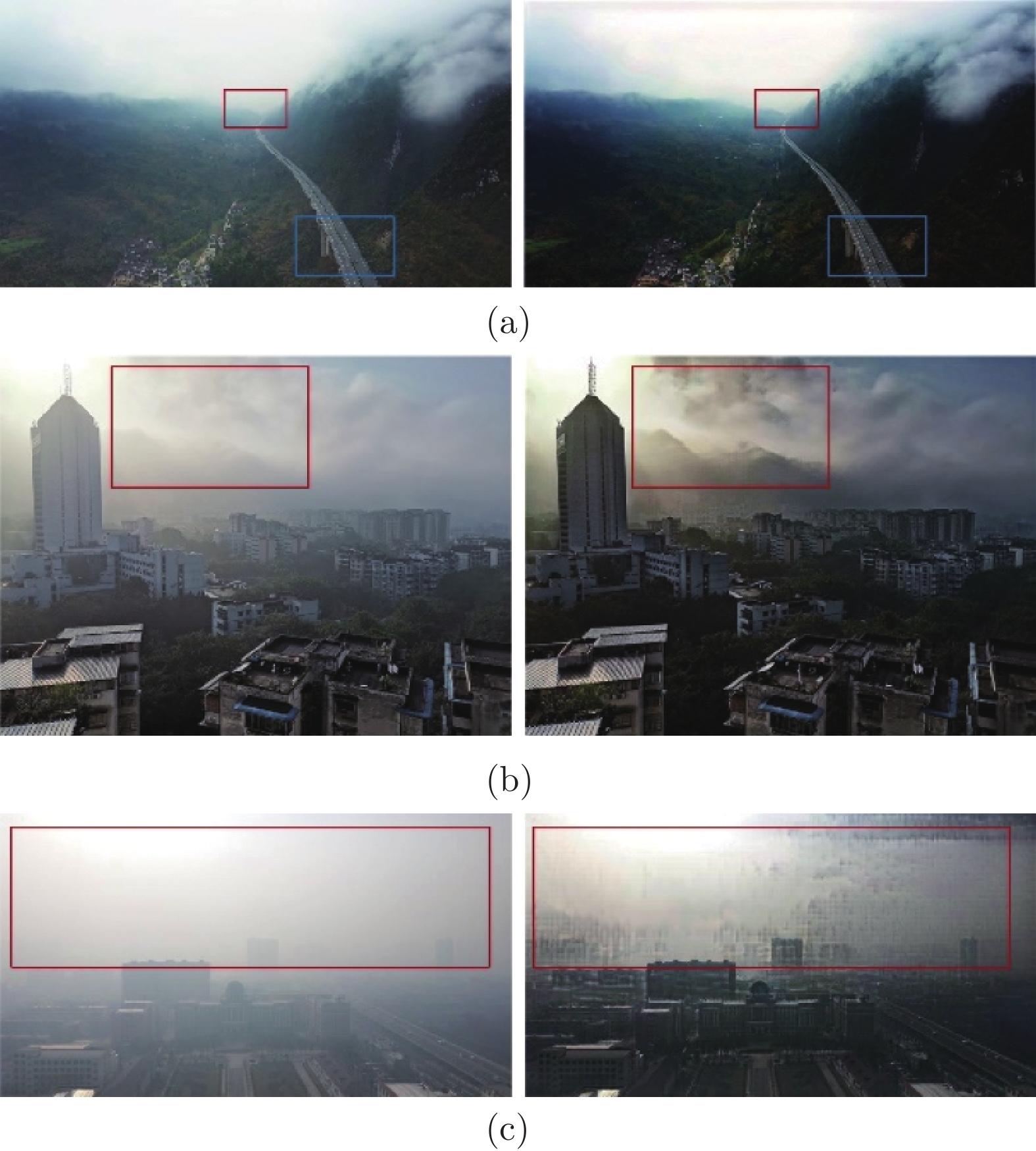
图 3 去雾效果 ((a) 有雾图像; (b) AOD-Net;(c) 改良后的AOD-Net)
Fig. 3 Defogging effect ((a) Fog image; (b) AOD-Net; (c) Improved AOD-Net)
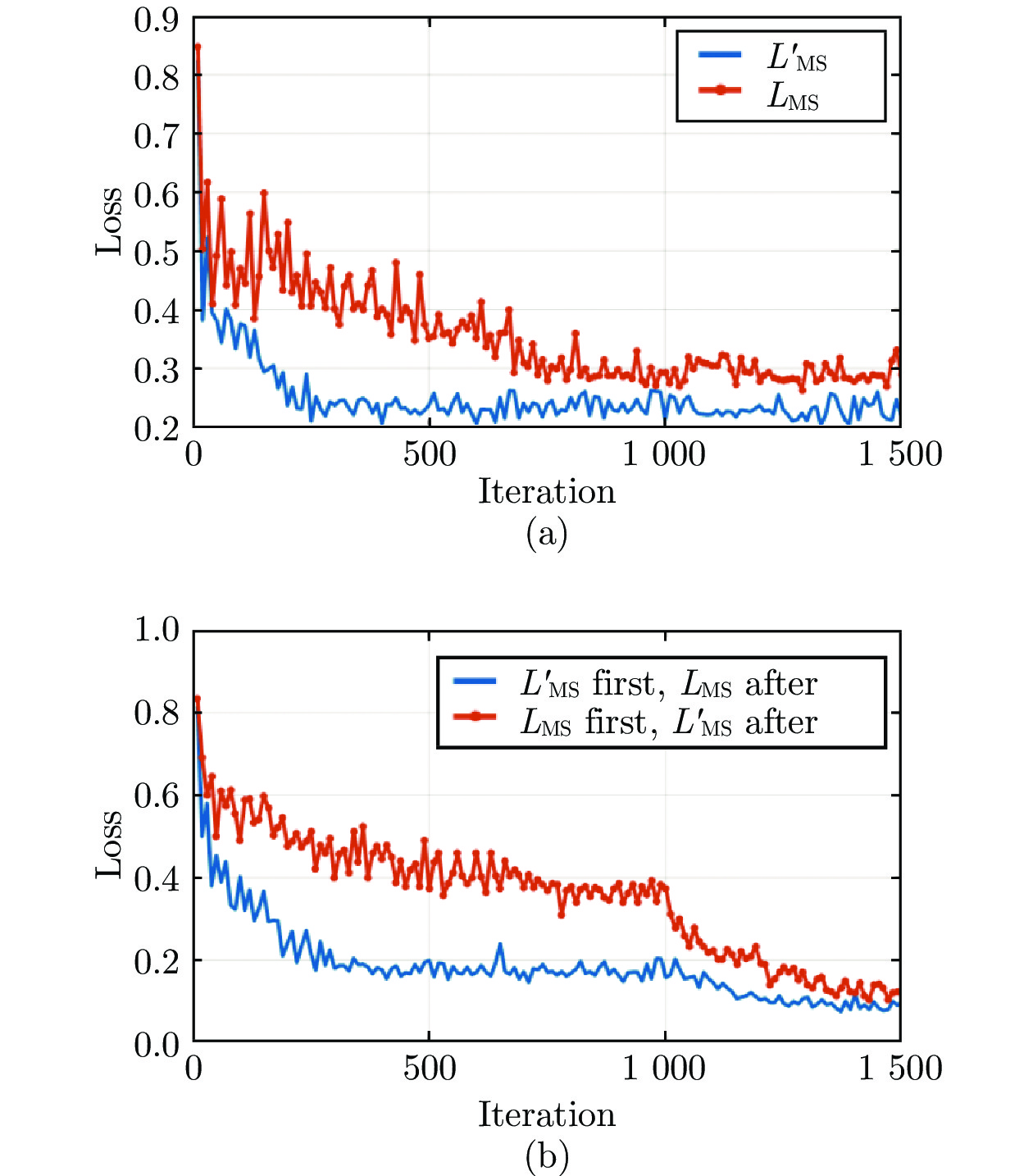
图 5 不同方法训练本文所提模型获得的损失曲线 ((a) 单一函数训练方法; (b) 分段函数训练方法)
Fig. 5 The loss curve obtained by training the proposed model with different methods ((a) The training method of single function; (b) The training method of piecewise function)
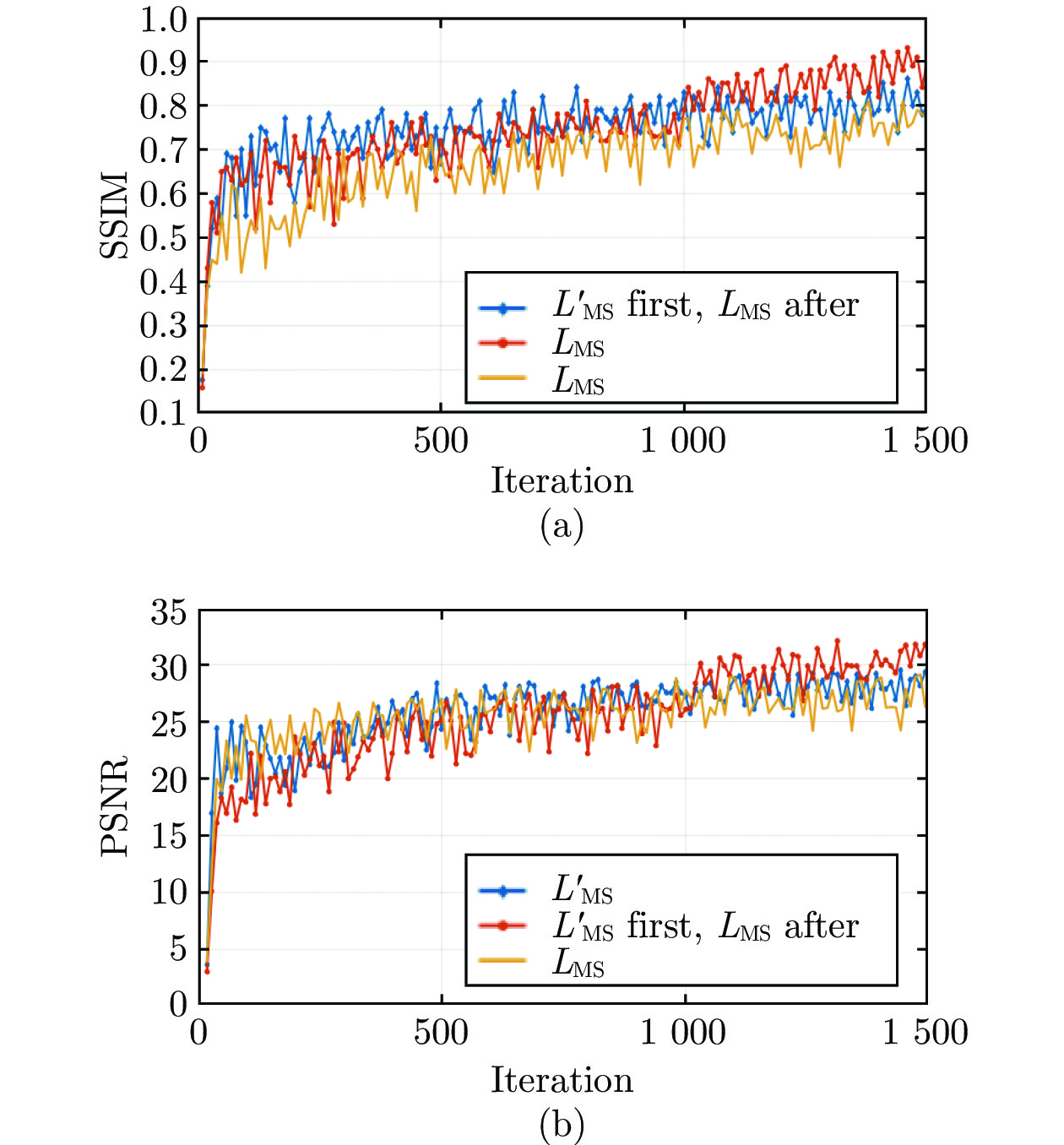
图 6 不同训练方式下的SSIM与PSNR变化曲线((a) SSIM曲线; (b) PSNR曲线)
Fig. 6 The curve of SSIM and PSNR under different training methods ((a) The curve of SSIM; (b) The curve of PSNR)
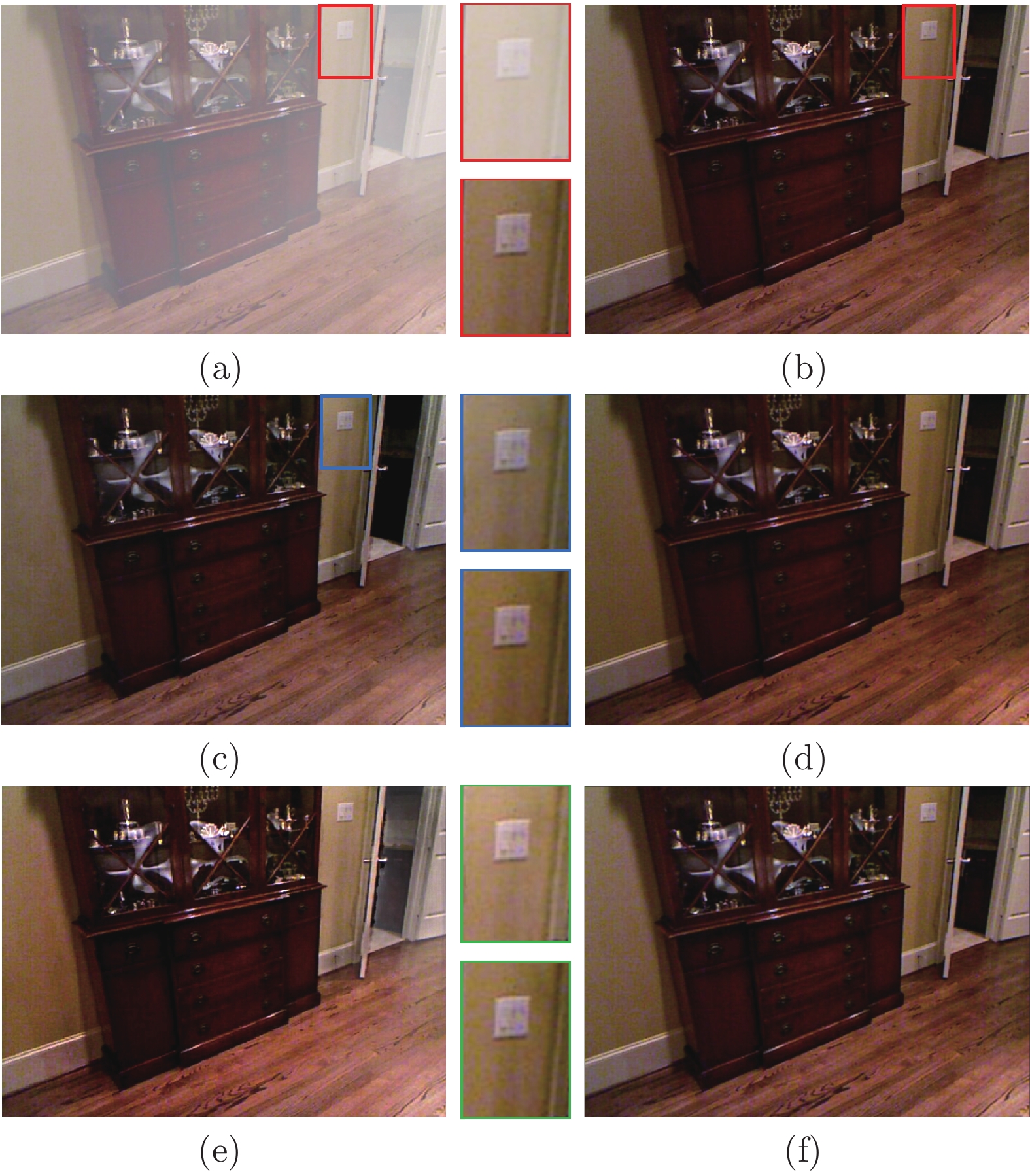
图 7 两种不同训练方法下的去雾效果 ((a) 合成雾图; (b) ground truth; (c) 所提模型用LMS训练1000次的效果; (d) 所提模型用LMS训练1500次的效果; (e) 所提模型用式L训练1000次的效果; (f) 所提模型用式L训练1500次的效果)
Fig. 7 Defogging effect of two different training method ((a) Synthetic fog image; (b) Ground truth; (c) The proposed model was trained after 1000 times by LMS; (d) The proposed model was trained after 1500 times by LMS; (e) The proposed model was trained after 1000 times by L; (f) The proposed model was trained after 1500 times by L)

图 8 合成有雾图像的实验结果展示 ((a) 有雾图像; (b) Ground truth; (c) DCP; (d) BCCR; (e) CAP; (f) DehazeNet;(g) MSCNN; (h) AOD-Net; (i) GFN; (j) GCANet; (k) FFANet; (l) 本文算法)
Fig. 8 Experimental results of the synthetic fog images ((a) Fog image; (b) Ground truth; (c) DCP; (d) BCCR; (e) CAP; (f) DehazeNet; (g) MSCNN; (h) AOD-Net; (i) GFN; (j) GCANet; (k) FFANet; (l) Proposed algorithm)

图 9 真实有雾航拍图像的实验结果展示 ((a) 有雾图像; (b) DCP; (c) BCCR; (d) CAP; (e) DehazeNet; (f) MSCNN;(g) AOD-Net; (h) GFN; (i) GCANet; (j) FFANet; (k) 本文算法)
Fig. 9 Experimental results of the real aerial fog images ((a) Aerial fog image; (b) DCP; (c) BCCR; (d) CAP; (e) DehazeNet; (f) MSCNN; (g) AOD-Net; (h) GFN; (i) GCANet; (j) FFANet; (k) Proposed algorithm)
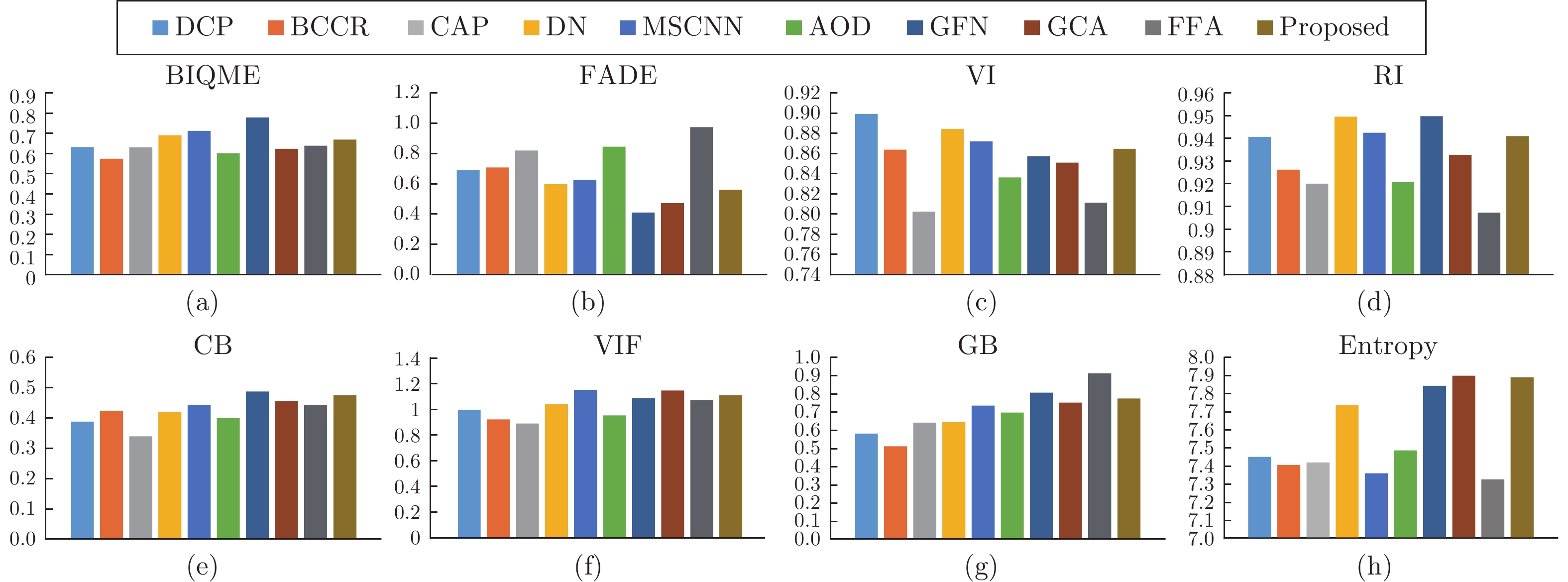
图 10 不同去雾算法在真实航拍有雾图像上的客观评价结果 ((a) BIQME; (b) FADE; (c) VI;(d) RI; (e) CB; (f) VIF; (g) GB; (h) Entropy)
Fig. 10 Objective evaluation results of different image dehazing algorithms on real aerial fog images ((a) BIQME; (b) FADE; (c) VI; (d) RI; (e) CB; (f) VIF; (g) GB; (h) Entropy)

图 11 消融实验结果 ((a) 航拍雾图像; (b) 本文方法; (c) 缺少L1与L2; (d) 缺少LS; (e) 缺少LTV; (f) 无多尺度(Mutil-Scale, MS)结构; (g) 无MS结构和L (损失函数为均方误差); (h) AOD-Net)
Fig. 11 Experimental results of ablation study ((a) Aerial fog image; (b) Proposed algorithm; (c) w/o L1 and L2 loss function; (d) w/o LS loss function; (e) w/o LTV loss function; (f) w/o MS structure; (g) w/o MS structure and L (The loss function is the mean square error); (h) AOD-Net)
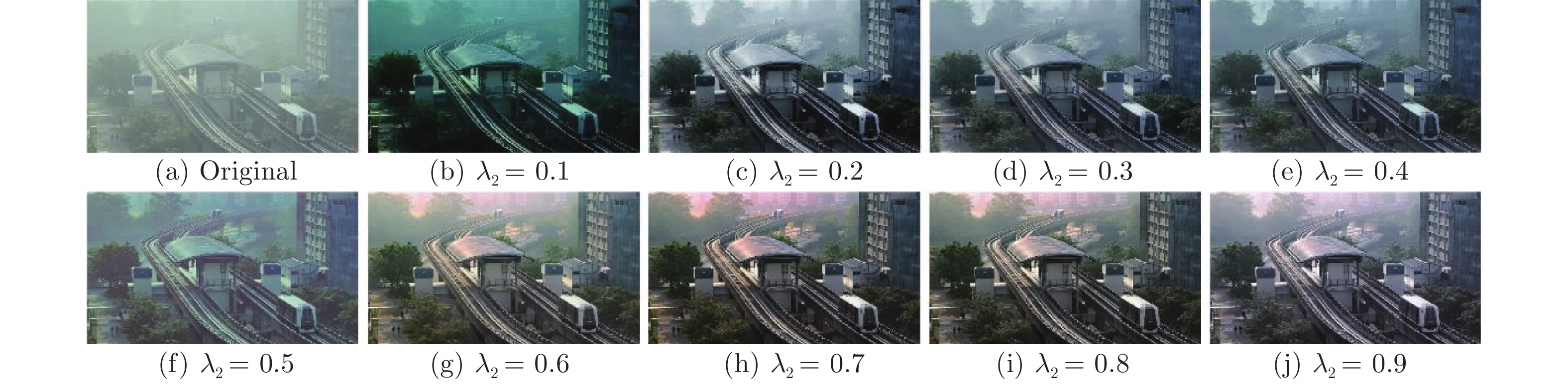
图 12 所提算法在λ2不同取值时的去雾效果
Fig. 12 The dehazing effect of the proposed algorithm at different values of λ2
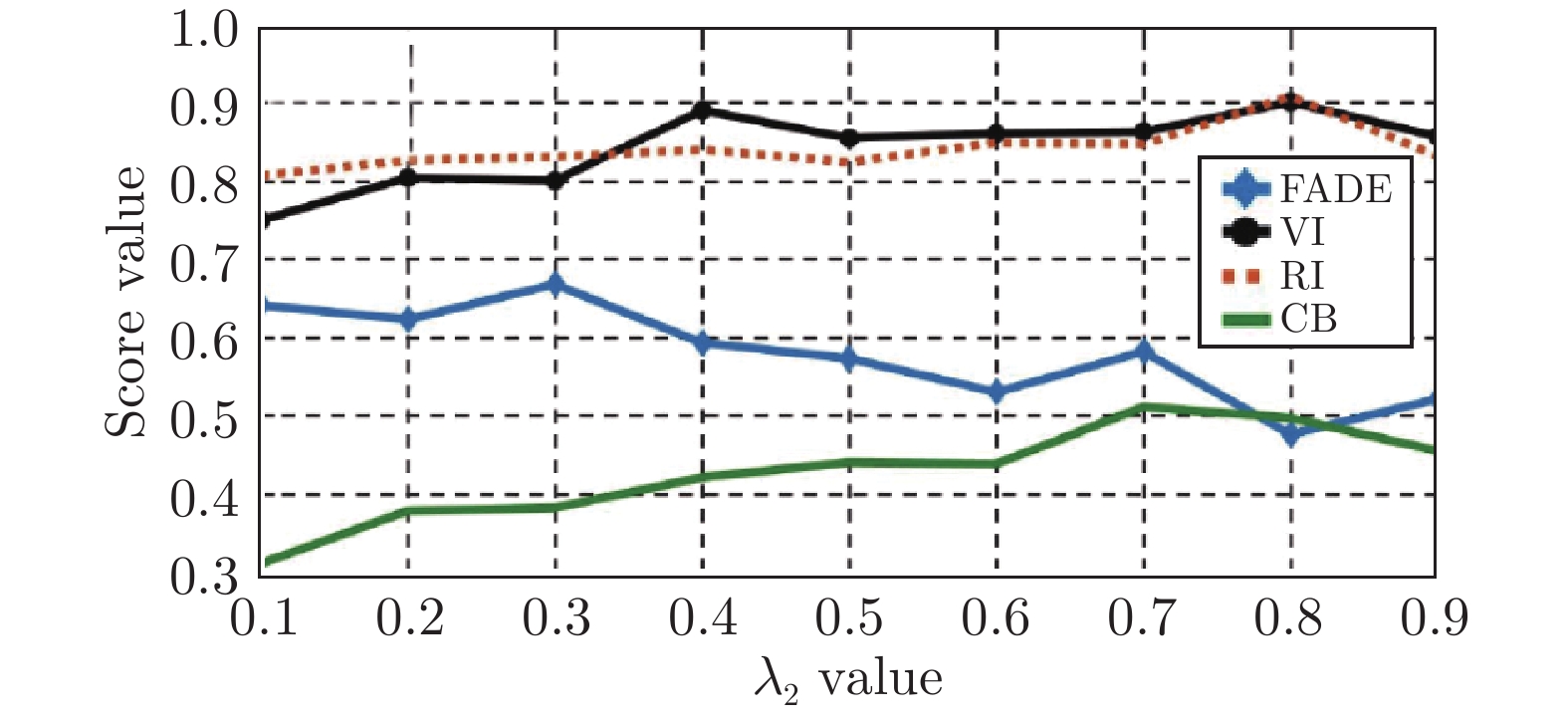
图 13
$ {\lambda _2} $ 不同取值时的图像指标变化($ {\lambda _2} $ =0.1 ~ 0.9)Fig. 13 The change of image index when λ2 takes different value (
$ {\lambda _2} $ =0.1 ~ 0.9)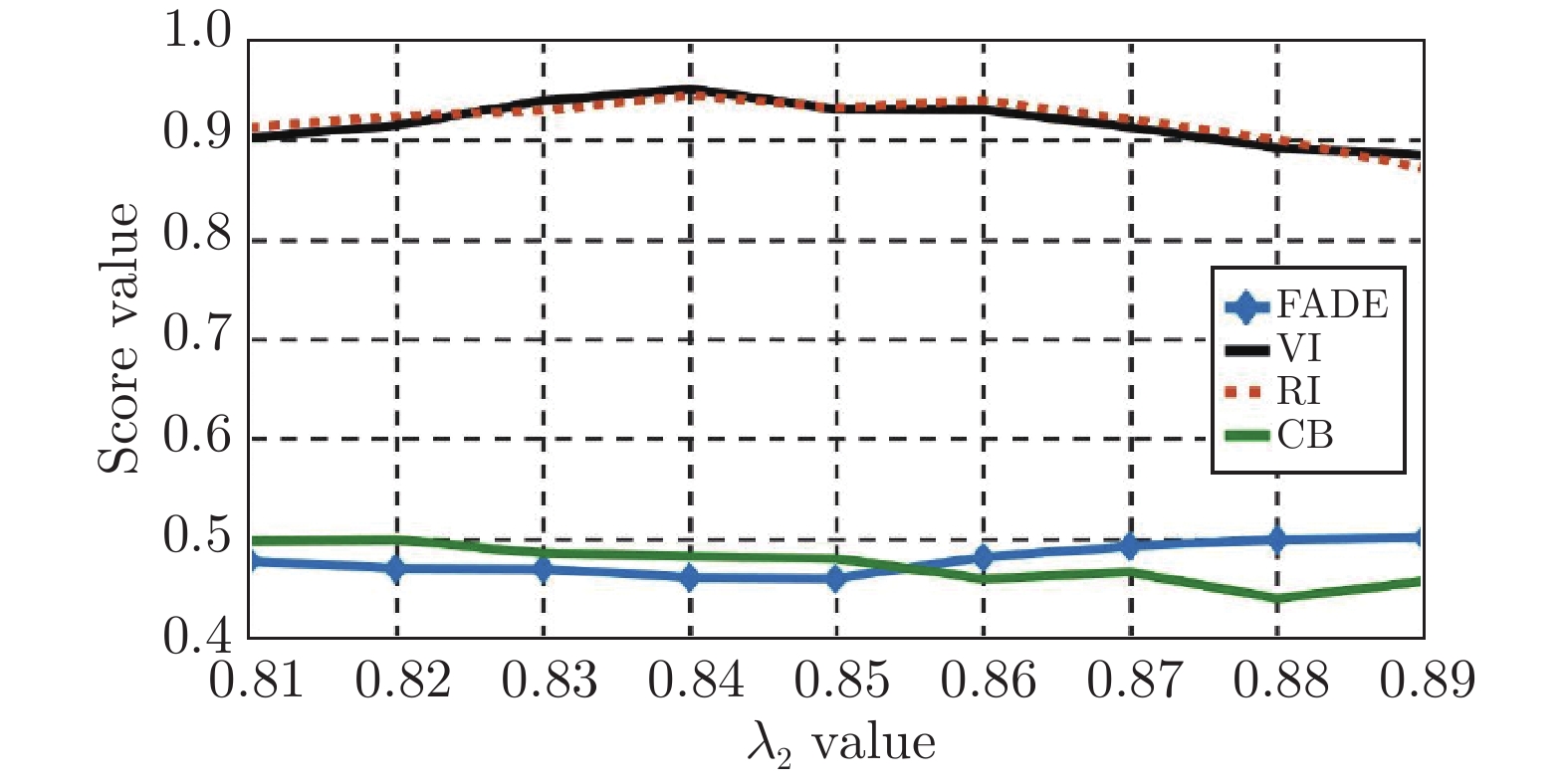
图 14
$ {\lambda _2} $ 不同取值时的图像指标变化($ {\lambda _2} $ =0.81 ~ 0.89)Fig. 14 The change of image index when
$ {\lambda _2} $ takes different value ($ {\lambda _2} $ =0.81 ~ 0.89)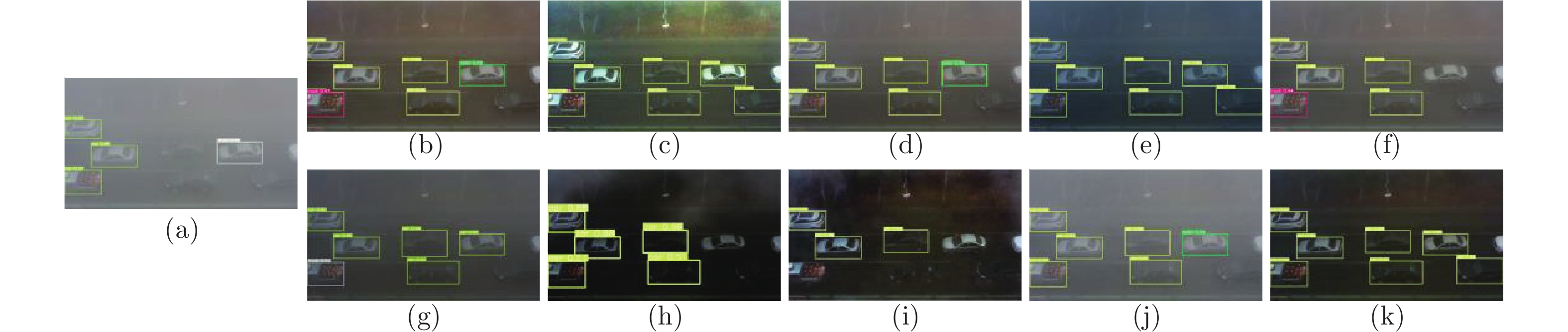
图 15 航拍去雾图像中车辆检测结果示例 ((a) 原图; (b) DCP; (c) BCCR; (d) CAP; (e) DehazeNet; (f) MSCNN;(g) AOD-Net; (h) GFN; (i) GCANet; (j) FFANet; (k) 本文算法)
Fig. 15 Example of aerial image dehazing in vehicle detection ((a) Original; (b) DCP; (c) BCCR; (d) CAP; (e) DehazeNet; (f) MSCNN; (g) AOD-Net; (h) GFN; (i) GCANet; (j) FFANet; (k) Proposed algorithm)

图 16 清晰图像上的去雾效果对比( (a) 原图; (b) DCP; (c) BCCR; (d) CAP; (e) DehazeNet; (f) MSCNN; (g) AOD-Net; (h) GFN; (i) GCANet; (j) FFANet; (k) 本文算法)
Fig. 16 Comparison of dehazing effects on clear images ((a) Original; (b) DCP; (c) BCCR; (d) CAP; (e) DehazeNet; (f) MSCNN; (g) AOD-Net; (h) GFN; (i) GCANet; (j) FFANet; (k) Proposed algorithm)
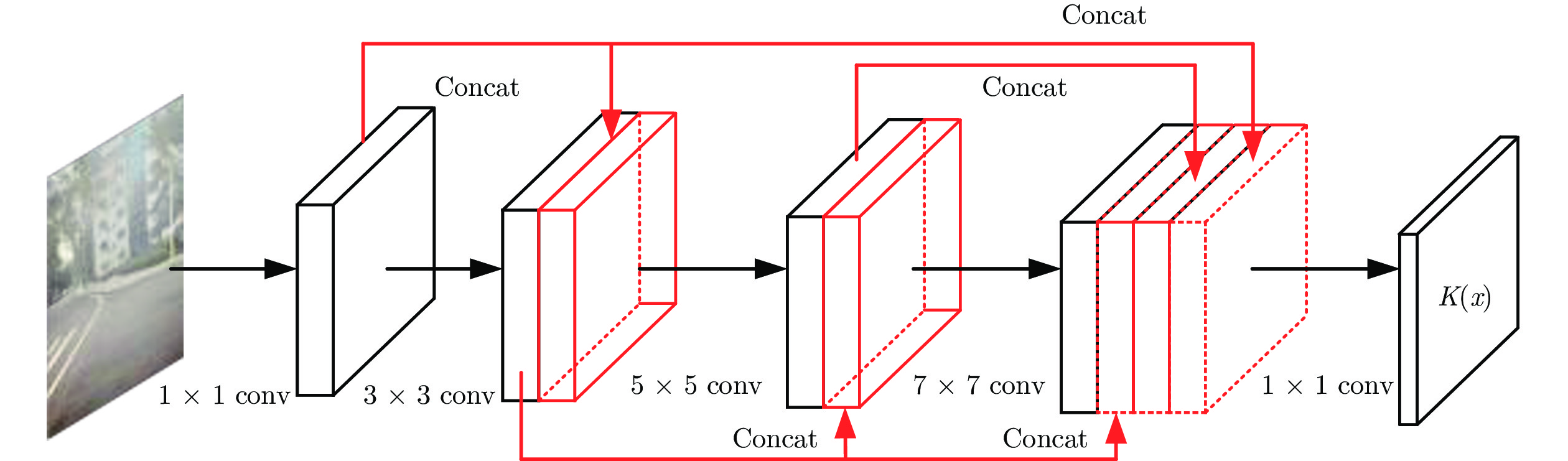
表 1 本文所提网络的参数
Table 1 The architectures of proposed network
Layer Input Size Num Filter Pad Conv1 128×128×3 32 1×1 0 Conv2 128×128×32 32 1×1 0 Pool1 128×128×32 — 3×3 1 Concat1 128×128×64 — — — Conv3 128×128×64 32 1×1 0 Pool2 128×128×32 — 5×5 2 Concat2 128×128×96 — — — Conv4 128×128×96 32 1×1 0 Pool3 128×128×32 — 7×7 3 Concat3 128×128×128 — — — Conv5 128×128×128 3 1×1 0  下载: 导出CSV
下载: 导出CSV
表 2 在合成有雾图像上的SSIM与PSNR结果
Table 2 Comparison of SSIM and PSNR tested on synthetic fog images
Model SSIM PSNR (dB) Indoor Outdoor Average Indoor Outdoor Average DCP[6] 0.7418 0.7901 0.7659 17.3148 15.5323 16.4236 BCCR[7] 0.8088 0.7719 0.7904 17.2119 16.3041 16.7580 CAP[8] 0.7942 0.8255 0.8099 16.9496 19.0829 18.0163 DehazeNet[11] 0.8653 0.8317 0.8485 20.0545 21.9992 21.0269 MSCNN[12] 0.7796 0.7931 0.7864 16.8927 19.0019 17.9473 AOD-Net[13] 0.8334 0.8848 0.8591 20.0267 18.4105 19.2186 GFN[14] 0.9039 0.8814 0.8927 21.1079 25.5399 23.3239 GCANet[15] 0.9025 0.8582 0.8804 22.3363 26.1431 24.2397 FFANet[16] 0.9313 0.9082 0.9198 28.4057 27.9932 28.1995 Proposed 0.8794 0.9011 0.8903 21.1924 23.4073 22.8994
下载: 导出CSV
表 3 在真实航拍雾图上的客观数值评价: (1) 最好的结果; (2) 次好的结果; (3) 第三好的结果
Table 3 Objective numerical evaluation on the fog map of real aerial photography: (1) The best result; (2) The second-best result; (3) The third-best result
Model BIQME FADE VI RI CB VIF GB Entropy DCP[6] 0.6235 0.6902 0.8992 (1) 0.9407 0.3884 0.9957 0.5814 7.4427 BCCR[7] 0.5751 0.7091 0.8639 0.9263 0.4239 0.9211 0.5112 7.3983 CAP[8] 0.6380 0.8206 0.8026 0.9201 0.3398 0.8892 0.6413 7.4115 DehazeNet[11] 0.6917 (3) 0.5984 0.8845 (2) 0.9496 (2) 0.4203 1.0396 0.6448 7.7265 MSCNN[12] 0.7131 (2) 0.6261 0.8721 (3) 0.9425 (3) 0.4439 1.1513 (1) 0.7352 7.3524 AOD-Net[13] 0.6013 0.8459 0.8365 0.9208 0.3995 0.9532 0.6968 7.4785 GFN[14] 0.7795 (1) 0.4119 (1) 0.8573 0.9498 (1) 0.4880 (1) 1.0872 0.8065 (2) 7.8334 (3) GCANet[15] 0.6244 0.4743 (2) 0.8512 0.9328 0.4566 (3) 1.1473 (2) 0.7518 7.8891 (1) FFANet[16] 0.6397 0.9752 0.8115 0.9074 0.4429 1.0724 0.9127 (1) 7.3193 Proposed 0.6694 0.5625 (3) 0.8649 0.9411 0.4753 (2) 1.1109 (3) 0.7749 (3) 7.8799 (2)
下载: 导出CSV
表 4 消融实验中的数值指标
Table 4 The numerical index in ablation experiment
Model w/o part SSIM PSNR VI RI FADE GB Proposed MS 0.7344 26.6419 0.8195 0.9004 0.6971 0.6806 L1 and L2 0.7659 28.0417 0.8547 0.9198 0.5832 0.7612 LS 0.7177 27.1259 0.8026 0.9035 0.7043 0.6327 LTV 0.7392 21.7884 0.6952 0.7259 0.8826 0.6122 MS and L 0.7293 25.5332 0.7919 0.8827 0.7033 0.6303 — 0.8903 28.8994 0.8996 0.9328 0.5108 0.7749 AOD-Net — 0.7031 23.3903 0.7523 0.9002 0.7439 0.7114
下载: 导出CSV
表 7 车辆检测的置信度数值, 标出三个最优的结果: (1) 最好的结果; (2) 次好的结果; (3) 第三好的结果
Table 7 Confidence value of vehicle detection, marking the three best results: (1) The best result; (2) The second-best result; (3) The third-best result
Dehazing model Detection confidence before dehazing Detection confidence after dehazing The number of identified car Detection confidence improvement Original 0.6837 — 3.74 — DCP[6] — 0.7917 5.42 15.80% BCCR[7] — 0.8233 (2) 7.84 (1) 20.42% (2) CAP[8] — 0.6467 6.26 −5.41% DehazeNet[11] — 0.8033 (3) 7.32 (3) 17.49% (3) MSCNN[12] — 0.7835 4.39 14.60% AOD-Net[13] — 0.6471 5.53 −5.35% GFN[14] — 0.7227 5.95 5.70% GCANet[15] — 0.7980 4.25 16.72% FFANet[16] — 0.7539 5.50 10.27% Proposed — 0.8362 (1) 7.48 (2) 22.31% (1)
下载: 导出CSV
表 8 清晰航拍图像上的客观数值评价
Table 8 Objective numerical evaluation on the clear images of aerial photography
下载: 导出CSV
-
[1] 韩敏, 闫阔, 秦国帅. 基于改进KAZE的无人机航拍图像拼接算法. 自动化学报, 2019, 45(2): 305-314. Han Ming, Yan Kuo, Qin Guo-Shuai. A mosaic algorithm for UAV aerial image with improved KAZE. Acta Automatica Sinica, 2019, 45(2): 305-314 [2] Patsiouras E, Tefas A, Pitas I. Few-shot image recognition for UAV sports cinematography. In: Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Seattle, WA, USA: IEEE, 2020. 965−969 [3] 周剑, 贾金岩, 张震, 陈盛伟. 面向应急保障的 5G 网联无人机关键技术. 重庆邮电大学学报(自然科学版), 2020, 32(4): 511-518. Zhou Jian, Jia Jin-Yan, Zhang Zhen, Chen Sheng-Wei. Key technologies for emergency communication based on 5G networked UAVs. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 2020, 32(4): 511-518 [4] Liu P J, Horng S J, Lin J S, Li T R. Contrast in haze removal: configurable contrast enhancement model based on dark channel prior. IEEE Transactions on Image Processing, 2019, 28(5): 2212−2227 [5] . Bui M T, Kim W. Single image dehazing using color ellipsoid prior. IEEE Transactions on Image Processing, 2018, 27(2): 999-1009 doi: 10.1109/TIP.2017.2771158 [6] . He K M, Sun J, Tang X O. Single image haze removal using dark channel prior. IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2011, 33(12): 2341-2353 doi: 10.1109/TPAMI.2010.168 [7] Meng G F, Wang Y, Duan J Y, Xiang S M, Pan C H. Efficient image dehazing with boundary constraint and contextual regularization. In: Proceedings of the 2013 IEEE International Conference on Computer Vision (ICCV). Sydney, Australia: IEEE, 2013. 617−624 [8] . Zhu Q S, Mai J M, Shao L. A fast single image haze removal algorithm using color attenuation prior. IEEE Transactions on Image Processing, 2015, 24(11): 3522-3533 doi: 10.1109/TIP.2015.2446191 [9] Chen W, Chen R Q, Lu Y, Yan Y, Wang H Z. Recurrent context aggregation network for single image dehazing. IEEE Transactions on Signal Processing Letters, 2021, 28: 419−423 [10] . Chen W T, Fang H Y, Ding J J, Kuo S Y. PMHLD: Patch map-based hybrid learning DehazeNet for single image haze removal. IEEE Transactions on Image Processing, 2020, 29: 6773-6788 doi: 10.1109/TIP.2020.2993407 [11] . Cai B L, Xu X M, Jia K, Qing C M, Tao D C. DehazeNet: an end-to-end system for single image haze removal. IEEE Transactions on Image Processing, 2016, 25(11): 5187-5198 doi: 10.1109/TIP.2016.2598681 [12] Ren W Q, Liu S, Zhang H, Pan J S. Single image dehazing via multi-scale convolutional neural networks. In: Proceedings of the 2016 European Conference on Computer Vision (ECCV). Amsterdam, Netherlands: Springer, 2016. 154−169 [13] Li B Y, Peng X L, Wang Z Y, Xu J Z, Feng D. AOD-Net: all-in-one dehazing network. In: Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV). Venice, Italy: IEEE, 2017. 4780−4788 [14] Ren W Q, Ma L, Zhang J W, Pan J S, Cao X C, Liu W, et al. Gated fusion network for single image dehazing. In: Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Salt Lake City, UT, USA: IEEE, 2018. 3253−3261 [15] Chen D D, He M M, Fan Q N, Liao J, Zhang L H, Hou D D, et al. Gated context aggregation network for image dehazing and deraining. In: Proceedings of the 2019 IEEE Winter Conference on Applications of Computer Vision (WACV). Waikoloa, HI, USA: IEEE, 2019. 1375−1383 [16] Qin X, Wang Z L, Bai Y C, Xie X D, Jia H Z. FFA-Net: Feature fusion attention network for single image dehazing. In: Proceedings of the Association for the Advance of Artificial Intelligence. Hilton Midtown, New York: AAAI, 2020. 11908−11915 [17] 杨燕, 陈高科, 周杰. 基于高斯权重衰减的迭代优化去雾算法. 自动化学报, 2019, 45(4): 819-828. Yang Yan, Chen Gao-Ke, Zhou Jie. Iterative optimization defogging algorithm using gaussian weight decay. Acta Automatica Sinica, 2019, 45(4): 819-828 [18] Zhang J, Cao Y, Wang Y, Wen C L, Chen W C. Fully point-wise convolutional neural network for modeling statistical regularities in natural images. In: Proceedings of the 26th ACM International Conference on Multimedia. Seoul, Korea: ACM, 2018. 984−992 [19] Silberman N, Hoiem D, Kohli P, Fergus R. Indoor segmentation and support inference from RGBD images. In: Proceedings of the 12th European conference on Computer Vision-Volume Part V. Berlin, Heidelberg: Springer, 2012. 746−760 [20] . Ephraim Y, Malah D. Speech enhancement using a minimum mean-square error log-spectral amplitude estimator. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1985, 33(2): 443-445 doi: 10.1109/TASSP.1985.1164550 [21] . Zhang J, Tao D C. FAMED-Net: A fast and accurate multi-scale end-to-end dehazing network. IEEE Transactions on Image Processing, 2020, 29: 72-84 doi: 10.1109/TIP.2019.2922837 [22] Guo C L, Li C Y, Guo J C, Loy C, Hou J H, Kwong S, et al. Zero-reference deep curve estimation for low-light image enhancement. In: Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, WA, USA: IEEE, 2020. 1777−1786 [23] Zhang H, Patel V M. Densely connected pyramid dehazing network. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Salt Lake City, UT, USA: IEEE, 2018. 3194−3203 [24] Das S, Dutta S. Fast deep multi-patch hierarchical network for nonhomogeneous image dehazing. In: Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Seattle, WA, USA: IEEE, 2020. 1994−2001 [25] Chen S X, Chen Y Z, Qu Y Y, Huang J Y, Hong M. Multi-scale adaptive dehazing network, In: Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Long Beach, CA, USA: IEEE, 2019. 2051−2059 [26] . Zhou W, Bovik A, Sheikh H, Simoncelli E. Image quality assessment: from error visibility to structural similarity. IEEE Transactions on Image Processing, 2004, 13(4): 600-612 doi: 10.1109/TIP.2003.819861 [27] Justin J, Alexandre A, Li F F. Perceptual losses for real-time style transfer and super-resolution. In: Proceedings of the 2016 European conference on computer vision (ECCV). Amsterdam, Netherlands: Springer, 2016. 694−711 [28] . Zhao H, Gallo O, Frosio I, Kautz J. Loss functions for image restoration with neural networks. IEEE Transactions on Computational Imaging, 2017, 3(1): 47-57 doi: 10.1109/TCI.2016.2644865 [29] . Li B Y, Ren W Q, Fu D P, Tao D C, Feng D, Zeng W J, et al. Benchmarking single-image dehazing and beyond. IEEE Transactions on Image Processing, 2019, 28(1): 492-505 doi: 10.1109/TIP.2018.2867951 [30] Gu K, Tao D C, Qiao J F, Lin W S. Learning a no-reference quality assessment model of enhanced images with big data. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(4): 1301−1313 [31] Choi L K, You J, Bovik A. Referenceless prediction of perceptual fog density and perceptual image defogging. IEEE Transations on Image Processing, 2015, 24(11): 3888−3901 [32] Zhao S Y, Zhang L, Huang S Y, Shen Y, Zhao S J. Dehazing evaluation: Real-world benchmark datasets, criteria, and baselines. IEEE Transactions on Image Processing, 2020, 29, 6947−6962 [33] . Zhu Z Q, Wei H Y, Hu Gang, Li Y Y, Qi G Q, et al. A novel fast single image dehazing algorithm based on artificial multiexposure image fusion. IEEE Transactions on Instrumentation and Measurement. 2021, 70, 5001523 [34] Liu Z, Blasch E, Xue Z Y, Zhao J Y, Laganiere R, et al. Objective assessment of multiresolution image fusion algorithms for context enhancement in night vision: A comparative study. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(1): 94−109 [35] Sheikh H, Bovik A. Image information and visual quality. IEEE Transactions on Image Processing, 2006, 15(2): 430−444 [36] Xydeas C, Petrovic V. Objective image fusion performance measure. Electronics Letters, 2000, 36(4): 308−309 [37] 程宇, 邓德祥, 颜佳, 范赐恩. 基于卷积神经网络的弱光照图像增强算法. 计算机应用, 2019, 39(4): 1162-1169 doi: 10.11772/j.issn.1001-9081.2018091979. Chen Yu, Deng De-Xiang, Yan Jia, Fan Ci-En. Weakly illuminated image enhancement algorithm based on convolutional neural network. Journal of Computer Applications, 2019, 39(4): 1162-1169 doi: 10.11772/j.issn.1001-9081.2018091979 [38] Redmon J, Divvala S, Girshick R, Farhadi A. You only look once: unified, real-time object detection. In: Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, NV, USA: IEEE, 2016. 779−788 期刊类型引用(2)
1. 王建国,李建国. 铁路危险货物运输智能检测及应急处置装置设计. 铁路物流. 2025(02): 27-33 .  百度学术
百度学术2. 相洪涛,张文文,肖文鑫,王磊,王远西. 仿生嗅觉感知系统气体识别和浓度估计模型. 自动化学报. 2024(04): 812-827 . 本站查看其他类型引用(5)
-

 下载:
下载:





计量
- 文章访问数: 1838
- HTML全文浏览量: 920
- PDF下载量: 400
- 被引次数: 7
