

Distributed Fusion Estimation for Multi-sensor Systems With Time-correlated Multiplicative Noises
-
摘要: 研究带时间相关乘性噪声多传感器系统的分布式融合估计问题, 其中时间相关的乘性噪声满足一阶高斯−马尔科夫过程. 通过引入虚拟状态和虚拟过程噪声, 构建了虚拟状态的递推方程. 首先, 基于新息分析方法, 分别对系统状态和虚拟状态设计局部一步预报器. 然后, 基于一步预报器设计状态的局部线性滤波器、多步预报器和平滑器. 推导了任意两个局部状态估计误差之间的互协方差矩阵. 接着, 基于线性最小方差意义下的矩阵加权、对角矩阵加权和标量加权融合算法, 给出相应的分布式融合状态估值器. 最后, 分析算法的稳定性. 仿真研究验证了该算法的有效性.Abstract: This paper is concerned with the distributed fusion estimation problem for multi-sensor systems with time-correlated multiplicative noises, where the time-correlated multiplicative noises satisfy first-order Gaussian-Markov processes. By introducing the friction states and friction process noises, the recursive equation of the friction state is established. Local one-step predictors for system state and friction states are designed based on an innovation analysis approach. Then, the local linear filter, multi-step predictor and smoother for the state are designed based on one-step predictor. The cross-covariance matrices between any two local state estimation errors are derived. Further, the corresponding distributed fusion state estimators are given based on the fusion algorithms weighted by matrices, diagonal matrices and scalars in the linear minimum variance sense. At last, the stability of the proposed algorithms is analyzed. The simulation research verifies the effectiveness of the proposed algorithms.
-
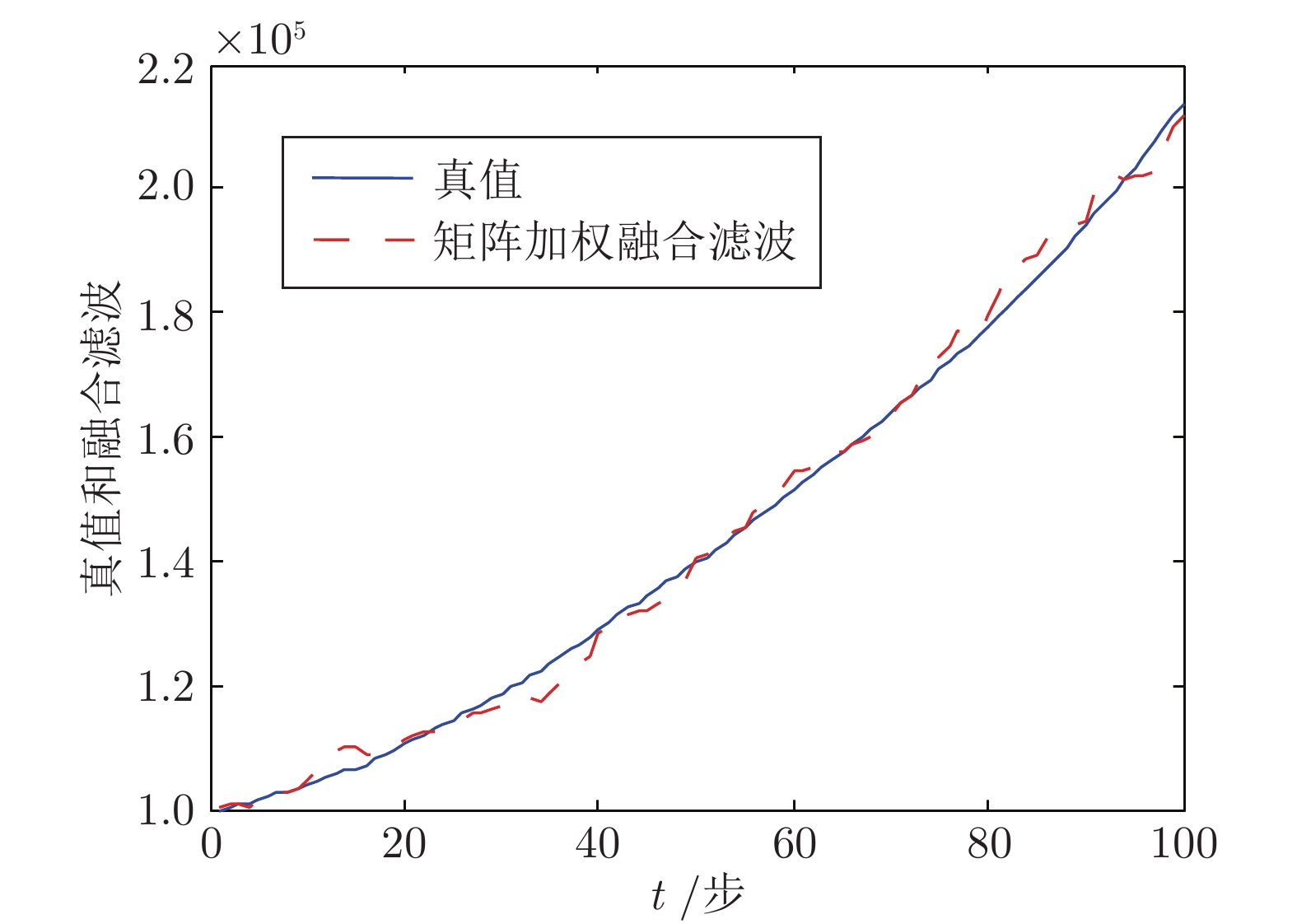
图 1 分布式矩阵加权融合滤波的位置跟踪性能
Fig. 1 The position tracking performance of distributed fusion filter weighted by matrices
-
[1] 邓自立, 王欣, 高媛. 建模与估计(第二版). 北京: 科学出版社, 2016.Deng Zi-Li, Wang Xin, Gao Yuan. Modeling and Estimation (Second Edition). Beijing: The Science Press, 2016. [2] 徐宁寿. 随机信号估计与系统控制. 北京: 北京工业大学出版社, 2001.Xu Ning-Shou. Random Signal Estimation and System Control. Beijing: Beijing University of Technology Press, 2001. [3] 祁波, 孙书利. 带未知通信干扰和丢包补偿的多传感器网络化不确定系统的分布式融合滤波. 自动化学报, 2018, 44(6): 1107--1114.Qi Bo, Sun Shu-Li. Distributed fusion filtering for multi-sensor networked uncertain systems with unknown communication disturbances and compensations of packet dropouts. Acta Automatica Sinica, 2018, 44(6): 1107--1114. [4] 李娜, 马静, 孙书利. 带多丢包和滞后随机不确定系统的最优线性估计. 自动化学报, 2015, 41(3): 611--619.Li Na, Ma Jing, Sun Shu-Li. Optimal linear estimation for stochastic uncertain systems with multiple packet dropouts and delays. Acta Automatica Sinica, 2015, 41(3): 611--619. [5] Kim K J, Iltis R A. Joint detection and channel estimation algorithms for QS-CDMA signals over time-varying channels. IEEE Transaction on Communication, 2002, 50(5): 845--855. doi: 10.1109/TCOMM.2002.1006565 [6] Iltis R A. Joint estimation of PN code delay and multipath using the extended Kalman filter. IEEE Transactions on Automatic Control, 1990, 38(10): 1677--1685. [7] Chow B S, Birkemeier W P. A new structure of recursive estimator. IEEE Transaction on Automatic Control, 1989, 34(5): 568--572. [8] Chow B S, Birkemeier W P. A new recursive filter for systems with multiplicative noise. IEEE Transactions on Information Theory, 1990, 36(6): 1430--1435. doi: 10.1109/18.59939 [9] Zhang L, Zhang X. An optimal filtering algorithm for systems with multiplicative/additive noises. IEEE Signal Processing Letters, 2007, 14(7): 469--472. doi: 10.1109/LSP.2006.891331 [10] Yu X, Jin G, Li J. Target tracking algorithm for system with Gaussian/non-Gaussian multiplicative noise. IEEE Transactions on Vehicular Technology, 2020, 69(1): 90--100. doi: 10.1109/TVT.2019.2952368 [11] Liu W. Optimal filtering for discrete-time linear systems with time-correlated multiplicative measurement noises. IEEE Transactions on Automatic Control, 2016, 61(7): 1972--1978. doi: 10.1109/TAC.2015.2480238 [12] Wang S, Wang Z, Dong H, F E Alsaadi. Recursive state estimation for linear systems with lossy measurements under time-correlated multiplicative noises. Journal of the Franklin Institute, 2020, 57: 1887--1908. [13] Liu W, Shi P. Optimal linear filtering for networked control systems with time-correlated fading channels, Automatica, 2019, 101: 345--353. doi: 10.1016/j.automatica.2018.11.042 [14] Li W, Jia Y, Du J. Tobit Kalman filter with time-correlated multiplicative measurement noise. IET Control Theory and Applications, 2017, 11(1): 122--128. doi: 10.1049/iet-cta.2016.0624 [15] Geng H, Wang Z, Liang Y, Cheng Y, Alsaadi F E. Tobit Kalman filter with time-correlated multiplicative sensor noises under redundant channel transmission. IEEE Sensors Journal, 2017, 17(24): 8367--8377. doi: 10.1109/JSEN.2017.2766077 [16] Lin H, Sun S. Globally optimal sequential and distributed fusion state estimation for multi-sensor systems with cross-correlated noises. Automatica, 2019, 101: 128--137. doi: 10.1016/j.automatica.2018.11.043 [17] Carlson N A. Federated square root filter for decentralized parallel processes. IEEE Transactons on Aerospace and Electronic Systems, 1990, 26(3): 517--525. doi: 10.1109/7.106130 [18] Kim K H. Development of track to track fusion algorithm. In: Proceedings of the American Control Conference. Maryland, USA: IEEE, 1994. 1037−1041 [19] Sun S, Deng Z. Multi-sensor optimal information fusion Kalman filter. Automatica, 2004, 40(6): 1017--1023. doi: 10.1016/j.automatica.2004.01.014 [20] 从金亮, 李银伢, 戚国庆, 盛安冬. 快速协方差交叉融合算法及应用. 自动化学报, 2020, 46(7): 1433--1444.Cong Jin-Liang, Li Yin-Ya, Qi Guo-Qing, Sheng An-Dong. A fast covariance intersection fusion algorithm and its application. Acta Automatica Sinica, 2020, 46(7): 1433--1444. [21] 王雪梅, 刘文强, 邓自立. 不确定系统改进的鲁棒协方差交叉融合稳态Kalman预报器, 自动化学报, 2016, 42(8): 1198--1206.Wang Xue-Mei, Liu Wen-Qiang, Deng Zi-Li. Modified robust covariance intersection fusion steady-state Kalman predictor for uncertain systems. Acta Automatica Sinica, 2016, 42(8): 1198--1206. [22] Sun S. Distributed optimal linear fusion estimators. Information fusion, 2020, 63: 56--73. doi: 10.1016/j.inffus.2020.05.006 [23] Sun S. Distributed optimal linear fusion predictors and filters for systems with random parameter matrices and correlated noise. IEEE Transactons on Signal Processing, 2020, 68: 1064--1074. doi: 10.1109/TSP.2020.2967180 [24] Ma J, Sun S. Distributed fusion filter for networked stochastic uncertain systems with transmission delays and packet dropouts. Signal Processing, 2017, 130: 268--278. doi: 10.1016/j.sigpro.2016.07.004 [25] Tian T, Sun S, Lin H. Distributed fusion filter for multi-sensor systems with finite-step correlated noises. Information Fusion, 2019, 46: 128--140. doi: 10.1016/j.inffus.2018.05.002 [26] Wang X, Liu W, Deng Z. Robust weighted fusion Kalman estimators for multi-model multisensor systems with uncertain-variance multiplicative and linearly correlated additive white noises. Signal Processing, 2017, 137: 339--355. doi: 10.1016/j.sigpro.2017.02.015 [27] Yang X, Song Z, Ma J. Distributed fusion filter for systems with time-correlated multi-plicative noise. In: Proceedings of the 39th Chinese Control Conference. Shenyang, China: IEEE, 2020. 2741−2745 [28] 孙书利, 马静. 随机奇异系统的分布式降阶最优融合Kalman滤波器. 自动化学报, 2006, 32(20): 286--290.Sun Shu-Li, Ma Jing, Distributed reduced-order optimal fusion Kalman filters for stochastic singular system. Acta Automatica Sinica, 2006, 32(20): 286--290. [29] Sun Shu-Li, Wang Guang-Hui, Modeling and estimation for networked systems with multiple random transmission delays and packet losses. Systems & Control Letters, 2014, 73, 6--16. [30] 段广全, 孙书利. 带未知模型参数和衰减观测率系统自校正分布式融合估计. 自动化学报, 2021, 47(2): 423--431.DUAN Guang-Quan, SUN Shu-Li. Self-tuning distributed fusion estimation for systems with unknown model parameters and fading measurement rates. Acta Automatica Sinica, 2021, 47(2): 423--431. -

 下载:
下载:

图(4)
计量
- 文章访问数: 1738
- HTML全文浏览量: 637
- PDF下载量: 224
- 被引次数: 0
