

-
摘要: 针对一类考虑模型非仿射特性和执行机构饱和特性的高超声速飞行器轨迹跟踪控制问题, 提出一种基于backstepping的输出反馈非线性控制方法. 考虑执行机构故障激发的未知非线性动态, 建立了非仿射形式飞行器模型. 为解决实际工程应用中存在的气流角测量值难以使用的问题, 利用高度和速度测量值以及高阶微分器设计了航迹倾角在线估计方法. 基于跟踪微分器设计了模型干扰项的估计方法, 并解决了backstepping方法应用中存在的“微分项爆炸”问题. 引入辅助系统降低控制量饱和带来的不利影响. 基于Lyapunov理论证明了闭环系统的稳定性. 最后, 通过对比仿真实验验证了所提方法的有效性.Abstract: A backstepping-based nonlinear control method is proposed for addressing the trajectory tracking control problem of a non-affine hypersonic vehicle subject to actuator saturation. Considering the unknown nonlinear dynamics invoked by actuator faults, the non-affine model of the flight vehicle is established. For tackling the unavailability of the measurements of the flow angles in practical engineering application, an on-line estimation method for flight path angle is designed utilizing the measurements of velocity and altitude as well as the high-order differentiator. The tracking differentiator is employed to construct the estimation methods for model disturbances and tackle the explosion of differentiation problem existing in the application of backstepping. The auxiliary systems are introduced to reduce the adverse effects caused by the saturation of control inputs. The stability of closed-loop system is proved based on the Lyapunov theory. Finally, the effectiveness of the proposed method is verified via comparative simulation experiments.
-
Key words:
- Hypersonic vehicle /
- non-affine /
- output feedback /
- state estimation /
- input constraint /
- tracking differentiator
-
无人艇作为由多种高技术集成的现代海洋运载装备, 具有小型化、智能化和多用途等特点. 无人艇编队可完成单艘艇无法完成的任务, 如编队扫雷、警戒巡航、饱和打击、协同搜索和编队护航[1-3]等, 在海洋科技创新和海洋资源开发领域有着举足轻重的地位, 同时也直接反映了国家的海洋科技创新发展能力、经济实力和国际竞争力等. 因此, 加快发展多无人艇技术, 提高无人艇编队控制性能, 对中国的国防安全、海洋经济建设和海上搜救援助等都有至关重要意义.
为了解决多艇编队控制, 已有学者做了大量研究并取得了一定研究成果[4-6], 如文献[7]将领航−跟随无人艇编队系统划分为跟踪控制子系统和编队控制系统, 分别设计了固定时间控制策略, 可实现有限时间收敛并可计算收敛时间的上界, 能够快速形成期望的编队队形并保持队形. 文献[8]研究了欠驱动无人艇预设时间非对称约束控制, 使用非对称障碍李雅普诺夫函数处理非对称时变约束问题. 在所设计的控制器作用下, 尽管存在外部干扰, 系统编队误差仍可在预定时间内收敛到零, 并一直保持在约束范围内, 通过仿真验证了算法的优越性. 文献[9]提出基于深度强化学习的欠驱动无人艇编队控制方法, 利用神经网络处理水动力阻尼和未知环境干扰, 仿真结果表明, 所提算法在具有较高控制精度的同时, 可保持期望的编队队形.
虽然上述文献实现了较好的编队控制效果, 但不能满足编队误差时间同步收敛的迫切需求. 无人艇在执行编队任务时, 往往要求无人艇的所有状态在某一时刻同时到达期望的编队状态, 实现所有状态的同步收敛即编队时间同步控制. 例如, 结构互异的无人艇组成的编队系统, 通过信息交互同一时间到达指定位置、形成指定姿态, 对目标进行饱和式打击, 可有效提升作战效率, 避免惯性大或离目标点远的单艘无人艇到达平衡点的时间滞后; 在巡逻作业初始阶段, 机动性能较好的单艘无人艇较早到达期望位置, 而机动性能较差的无人艇到达期望编队位置的时间严重滞后, 通过时间同步控制可有效解决个体到达编队位置时间不同步导致的巡逻区域难以覆盖的问题. 2021年, 文献[10]提出时间同步收敛的具体概念, 它是在有限时间控制基础上, 额外要求系统不同维度状态同步收敛到平衡点. 扩展到无人艇编队控制, 就是无人艇所有自由度状态在同一时刻到达平衡点. 文献[10]设计的时间同步控制器可使一阶、二阶单一系统的所有状态变量在同一时间收敛到原点, 并给出了时间同步稳定的李雅普诺夫判据[7]. 2015年, 文献[11]研究的具有连续状态反馈的简单机械系统有限时间稳定性已经取得了时间同步稳定, 并且将其推广到了多自由度机械系统, 只是并未对时间同步控制作出说明或研究重点不在此. 近年来, 有学者做了时间同步控制的研究, 如文献[12]基于滑模控制针对航天器设计了固定时间收敛控制器和固定时间干扰观测器, 并验证了闭环系统是全局固定时间同步稳定的, 获得了同步控制性能; 文献[13]研究了多智能体系统固定时间同步一致跟踪控制, 可使多智能体的所有状态在固定时间内并在同一时刻稳定跟踪领航者的状态, 但只考虑了多智能体间的无向通信拓扑.
此外, 为了更好地满足工程实践需求, 针对模型不确定性和外部环境干扰问题, 文献[14-15]设计辅助状态向量作为干扰观测器的观测值, 实现对未知时变干扰的观测, 并证明了观测误差是全局一致最终有界; 文献[16]使用径向基函数神经网络处理高阶非线性多智能体系统的不确定性, 神经网络权值最终收敛到一个小领域内; 文献[17]首次成功地使用李雅普诺夫方法分析了超螺旋策略处理不确定系统的特性. 由于超螺旋方法具有较好的抗干扰性, 受到越来越多学者的青睐, 如文献[18-19]针对模型不确定性和外部干扰问题提出有限时间观测器, 估计误差不仅可在有限时间内收敛, 还避免了控制信号的抖振问题; 文献[20]提出鲁棒自适应超螺旋滑模编队控制方法, 设计鲁棒自适应律用于补偿欠驱动无人水下航行器的不确定水动力参数和未知环境干扰. 虽然上述处理不确定性或外部干扰方法取得了较好效果, 但只实现了渐近收敛或有限时间收敛, 不能兼顾所有状态的同步性.
当编队系统误差收敛时间大于观测器收敛时间时, 观测误差首先收敛, 在时间同步编队控制器作用下, 编队误差可达到时间同步控制效果; 当编队系统误差收敛时间小于观测器收敛时间时, 如果观测器是常规的渐近稳定、有限时间稳定或是固定时间稳定时, 由于观测器没有时间同步稳定的作用, 各状态分量收敛时间先后不一, 系统总体就不能达到收敛的时间同步性效果, 所以现有观测器与时间同步稳定框架不兼容. 由于时间同步收敛稳定性判据具有更高的条件, 要求所有状态同时收敛到平衡点, 因此, 上述文献研究成果不能直接应用到时间同步控制系统中观测模型不确定性和外部干扰, 针对此问题, 文献[21-22]分别提出多变量超螺旋干扰观测器和时间同步收敛干扰观测器, 实现了干扰观测器与时间同步稳定的兼容.
通过以上分析可知, 无人艇编队控制的研究从渐近稳定控制[16, 23-24]逐渐发展到有限时间控制[25-26]和固定时间控制[27-31], 但现有文献在控制器设计过程中主要考虑最终能否实现期望的编队队形, 以提高编队的控制精度和总体的收敛时间为目的, 没有考虑不同无人艇收敛时间的同步性, 并且这些控制方法难以实现时间同步收敛, 仍然不能满足时间同步收敛的需求. 另外, 现有的自适应技术、干扰观测器、扩张状态观测器等处理模型不确定性和外部环境干扰的方法不能有效地兼容时间同步稳定性判据, 所以不能直接应用到时间同步控制中. 因此, 本文通过利用滑模控制技术和范数符号函数性质, 针对无人艇编队控制系统中的时变扰动、模型不确定性和收敛时间不同步问题, 提出一种新型的时间同步编队控制方法. 本文主要贡献如下:
1)利用比例保持特性, 提出一种时间同步控制框架, 基于此框架设计的时间同步稳定的无人艇编队控制器, 可保证系统中所有个体的所有自由度的编队误差在同一时刻收敛到平衡点;
2)本文的有限时间同步干扰观测器不仅解决了无人艇编队系统中模型不确定性和时变干扰问题, 通过范数符号函数实现了观测误差的比例保持特性, 使观测误差具有有限时间稳定性和比例保持特性, 观测误差所有状态分量可在同一时刻收敛, 从而实现了干扰观测器的有限时间同步收敛效果. 不论观测误差是否滞后于编队误差的收敛时间, 整个系统都是时间同步稳定的, 从而实现了与时间同步稳定框架的兼容, 保证整个闭环系统的时间同步稳定.
本文结构如下: 第1节是预备知识和问题描述, 简要介绍了有限时间稳定、时间同步稳定和比例保持特性的相关引理等预备知识; 第2节设计了时间同步稳定编队控制器以及与时间同步稳定性兼容的有限时间同步干扰观测器, 结合李雅普诺夫稳定性定理、有限时间稳定性定理和时间同步稳定性定理, 完成了系统闭环稳定性分析; 第3节通过数值仿真验证了本文控制方法的有效性; 第4节进行总结与展望.
1. 预备知识与问题描述
1.1 有限时间稳定和时间同步稳定
定义1[11]. 考虑如下动态系统:
$$ \dot x = f(x,t),\;f(0,t) = 0,\;x \in U \subset {{\bf{R}}^n} $$ (1) 式中, $ f:U \to {{\bf{R}}^n} $在原点$ x = 0 $的一个开邻域$ U $内连续. 如果系统当且仅当是李雅普诺夫稳定的且为有限时间收敛的, 则此系统的解$ x = 0 $为(局部)有限时间稳定. 有限时间收敛是指在初始时间$ t_0 $处的任意初始条件$ {x_0} \in {U_0} \subset U $, 存在时间$ T > {t_0} $, 使得系统解$ x(t,{x_0}) $在$ t \in [0,T) $时, 满足$ x(t,{x_0}) \in {U_0}\backslash \left\{ 0 \right\} $和$\mathop {\lim }\nolimits_{t \to T} {\kern 1pt} x(t,{x_0}) = 0$. 当$ \forall t > T $时, 有$x(t,{x_0}) = 0$; 当$U = {U_0} = {{\bf{R}}^n}$, 则$ x = 0 $是全局有限时间稳定的.
引理1[11]. 假设存在正定的连续可微函数$ V(x): {U_1} \to {\bf{R}} $, $ {U_1} \subseteq U \in {{\bf{R}}^n} $, 满足:
$$ \dot V(x,t) \le - c{V^\alpha }(x,t),\; \forall x \in {U_1}\backslash \left\{ 0 \right\} $$ (2) 式中, $ c>0 $, $ 0<\alpha<1 $, 则称该系统是局部有限时间稳定的. 对任意给定的初始条件$ x({t_0}) \in {U_1} $, 收敛时间满足$T \le {V^{1 - \alpha }}(x({t_0}),{t_0})/(c(1 - \alpha ))$.
引理2[11]. 假设存在正定的连续可微函数$ V(x): {U_1} \to {\bf{R}} $, $ {U_1} \subseteq U \in {{\bf{R}}^n} $, 满足:
$$ \dot V(x,t) \le -dV- c{V^\alpha }(x,t), \forall x \in {U_1}\backslash \left\{ 0 \right\} $$ (3) 式中, $ c>0 $, $ d>0 $, $ 0<\alpha<1 $, 则称该系统是有限时间稳定的. 对任意给定的初始条件$ x({t_0}) \in {U_1} $, 收敛时间满足$T \le \ln \frac{{d V{^{1 - \alpha}{\left( {{x_0}} \right)}} + c }}{c}/({d\left( {1 - \alpha} \right))}$.
定义2[32]. 如果对于所有的$ x_0 $, 存在时间常数$ T<\infty $, 当$ t\geq T $, 对所有$ x_i(0)\neq 0 $, $ x_i(t) = 0 $成立, 当$ t<T $, $ x_i(t)\neq 0 $成立; 当$ t\geq 0 $, 对所有初始状态$ x_i(0) = 0 $, $ x_i(t)\equiv 0 $成立, 则动态系统(1)的解是时间同步稳定的.
注1. 通过比较引理1和定义2可以看出, 时间同步稳定比有限时间稳定的条件更为严格. 有限时间稳定允许系统中的一些状态在时间常数$ T $前到达平衡点, 其余状态在$t\rightarrow T$时到达原点; 而时间同步稳定要求系统中所有状态在同一时刻到达原点, 因此有限时间稳定和时间同步稳定的本质区别在于系统的所有状态是否在同一时刻收敛到平衡点.
定义3[10]. 比例保持. 如果对于系统(1)中的闭环状态$ x $, $ x\neq 0 $, 有:
$$ \frac{x}{\|x\|} = \xi \frac{f(x)}{\|f(x)\|} $$ (4) 则称$ x $具有比例保持特性, 其中$ \xi $是比例保持的方向, 可为$ 1 $或$ -1 $.
引理3[21]. 如果系统状态$ x $是比例保持的, 对于$\forall x_i(t), \;x_j(t)\neq0,\; i,j\in{1,2,\cdots,n}, \;i\neq j$, 则:
$$ \frac{x_i(t)}{x_j(t)} = c_{ij} $$ (5) 成立, 其中$ c_{ij} = {x_i(0)}/{x_j(0)} $是非零常数.
如果$ x $是在欧几里得空间中表示系统的位置, 状态$ x $比例保持特性的轨迹是任意初始状态到平衡点之间的最短路径.
引理4[10]. 考虑李雅普诺夫函数$ V(x) $, 系统(1)的原点是有限时间同步稳定的, 且同步时间为$T(x_0)\leq V^{(1-\alpha)}(x_0)/(c(1-\alpha))$, 如果满足如下条件:
1)存在常数 $ c>0, 0<\alpha<1 $, 满足 $ \dot V(x)\leq $ $-cV(x)^{\alpha} $;
2)状态$ x $具有比例保持特性.
1.2 代数图论
图$ G $由$ N $个无人艇和连接无人艇的边组成, 可表示为$ G = \{ V,\varepsilon \} $, $ V = \{ 1, \cdot \cdot \cdot ,N\} $表示$ N $个无人艇, 集合$ \varepsilon\subseteq V \times V $为连接2个节点$ i $和$ j $边组成的边集, 表示2艘无人艇体间的通信关系, 如果边是有方向的, 则称为有向图, 只能单向通信, 如$ (i,j) \in \varepsilon $表示第$ j $艘无人艇可获取第$ i $艘无人艇的信息, 反之不成立; 如果边没有方向, 则称为无向图. 自连接是不允许的即$ (i,i) \notin \varepsilon $. 图的邻接矩阵可定义为$A = [{a_{ij}}] \in {{\bf{R}}^{N \times N}}$, 如果$ (i,j) \in \varepsilon $, 则$ {a_{ij}} = 1 $; 否则, ${a_{ij}} = 0$[33].
定义一个入度矩阵$ D = {{{{\rm{diag}}}\{ }}{d_1}{\rm{,}} \cdot \cdot \cdot {\rm{,}}{d_n}{{\} }} $和拉普拉斯矩阵$ L = D - A $, $ {d_i} = \sum\nolimits_{j = 1}^N {{a_{ij}}} $. 拉普拉斯矩阵$ L = ({l_{ij}}) \in {{\bf{R}}^{N \times N}} $可进一步表示为$ {l_{ii}} = \sum\nolimits_{j \ne i} {{a_{ij}}} $, $ {l_{ij}} = - {a_{ij}} $, $ i \ne j $.
1.3 问题描述
考虑由$ N+1 $艘无人艇组成的编队系统, 第$ i $艘无人艇的运动学和动力学模型可表示为[8]:
$$\left\{ \begin{aligned} &\dot \eta_i = R(\eta_i(t))\nu_i, \; \; \; \; \; \; \; i = L, 1, 2, \cdots,N\\ &\dot \nu_i = M_i^{-1}(-C_i(\nu_i)\nu_i-D_i(\nu_i)\nu_i+\tau_i+\tau_{wi}) \end{aligned}\right. $$ (6) 式中, $ L $表示领航者, $ 1,2,\cdots,N $表示$ N $个跟随者. $ \tau_i = [\tau_{ui},\tau_{vi},\tau_{ri}]^\text{T} $为控制输入, $ \tau_{wi} $为风、浪和流造成的外部环境干扰, $ \eta_i(t) = [x_i,y_i,\psi_i]^\text{T} $表示第$ i $艘无人艇在大地坐标系下的北向位置、东向位置和艏向角, $ \nu_i = [u_i,v_i,r_i]^\text{T} $表示第$ i $艘无人艇在船体坐标系下的纵向速度、横向速度和艏摇角速度, 如图1所示. $R^{\rm{T}}(\eta_i(t)) = R^{-1}(\eta_i(t))$表示从船体坐标系到北−东坐标系的无人艇编队运动曲线, 且:
 图 1 北-东坐标系的无人艇编队运动曲线Fig. 1 Unmanned surface vehicles' moving curve in the north-east frame
图 1 北-东坐标系的无人艇编队运动曲线Fig. 1 Unmanned surface vehicles' moving curve in the north-east frame$$ R({\eta _i(t)}) = \left[ {\begin{array}{*{20}{c}} {\cos {\psi _i}}&{ - \sin {\psi _i}}&0\\ {\sin {\psi _i}}&{\cos {\psi _i}} &0\\ 0 & 0 &1 \end{array}} \right] $$ (7) $ M_i\in{\bf{R}}^{3\times 1} $, $ C_i(\nu_i)\in{\bf{R}}^{3\times 1} $, $ D_i(\nu_i)\in{\bf{R}}^{3\times 1} $分别表示惯性质量矩阵, 科里奥利向心力矩阵和水动力阻尼矩阵, 形式如下:
$$ \begin{split} &{M_i} = M_i^\text{T} = \left[ {\begin{array}{*{20}{c}} {{m_{11i}}}&0&0\\ 0&{{m_{22i}}}&{{m_{23i}}}\\ 0&{{m_{32i}}}&{{m_{33i}}} \end{array}} \right]\\ & {C_i}({\nu _i}) = \left[ {\begin{array}{*{20}{c}} 0&0&{-m_{22i}v_i}\\ 0&0&{m_{11i}u_i}\\ { m_{22i}v_i}&{-m_{11i}u_i}&0 \end{array}} \right]\\ & D_i(\nu_i)=\left[ {\begin{array}{*{20}{c}} d_{11i}&0 &0\\ 0 &d_{22i} &d_{23i}\\ 0 &d_{32i} &d_{33i} \end{array}}\right] \end{split} $$ 为了方便, 可将无人艇运动学模型和动力学模型(6)转化为:
$$ \begin{split} M_i&(\eta_i(t))\ddot\eta_i(t)+C_i(\eta_i(t),\dot\eta_i(t))\dot\eta_i(t)\;+\\ &D_i(\eta_i(t),\dot\eta_i(t))\dot\eta_i(t) = R_i(\eta_i(t))(\tau_i+\tau_{wi}) \end{split} $$ (8) 式中,
$$ \begin{split}& M_i(\eta_i(t)) = R_i(\eta_i(t)) M_i R_i^{-1}(\eta_i(t))\\ & C_i(\eta_i(t),\dot\eta_i(t)) = R_i(\eta_i(t))[C_i(\nu_i)\;-\\ &\qquad M_i R_i^{-1}(\eta_i(t))\dot R_i(\eta_i(t))]R_i^{-1}(\eta_i(t))\\ & D_i(\eta_i(t),\dot\eta_i(t)) = R_i(\eta_i(t))D_i(\nu_i)R_i^{-1}(\eta_i(t)) \end{split} $$ 本文考虑了无人艇的不确定阻尼项$ D_i(\nu_i) $, $D_i(\nu_i) = \bar D_i(\nu_i)+\Delta D_i(\nu_i)$, 其中$ {\bar D_i}({\nu _i}) $是阻尼项的名义值. 因此, 式(8)可重新写为:
$$ \begin{split} &M_i(\eta_i(t))\ddot \eta_i(t)+C_i(\eta_i(t),\dot\eta_i(t))\dot\eta_i(t)\;+\\ &\qquad \bar D_i(\eta_i(t),\dot\eta_i(t))\dot\eta_i(t) = \bar\tau_i+\rho_i(t) \end{split} $$ (9) 式中, 控制输入$ \bar\tau_i = R_i(\psi_i)\tau_i $, 包含模型不确定项和外部环境干扰的未知项为$\rho_i(t) = -R_i(\eta_i(t))\; \times$ $\Delta D_i(\nu_i)R_i^{-1}(\eta_i(t))(\dot\eta_i(t))+$ $R_i(\eta_i(t))\tau_{wi} = R_i(\eta_i(t))\;\times$ $(\tau_{wi}-\Delta D_i(\nu_i)\nu_i).$
对拉普拉斯矩阵$ L = D-A $, 定义一个新的拉普拉斯矩阵$ \iota $:
$$ \iota = {\iota_{ij}}\in{\bf{R}}^{N \times N} $$ 式中,
$$ \iota_{ij}= \left\{ \begin{aligned} &0, &&l_{ii}=0\\ &1, &&l_{ii}\neq 0 \;\text{且}\; i = j\\ &\frac{l_{ij}}{l_{ii}},&& l_{ii}\neq 0\; \text{且}\; i\neq j \end{aligned} \right.$$ 在本文网络拓扑结构的有向拉普拉斯矩阵$ \iota $可表示为:
$$ \iota={\iota_{ij}}_{(N+1)\times(N+1)} = \left[ {\begin{array}{*{20}{c}} {\boldsymbol{0}}&{{{\boldsymbol{0}}_{1 \times N}}}\\ {{\iota _1}}&{{\iota _2}} \end{array}} \right] $$ (10) 式中,
$$\begin{split} \iota_{ij}= \left\{ \begin{aligned} &0, &&i=L\\ &\frac{l_{ij}}{l_{ii}}, &&i\neq L \;\text{且}\; i\neq j\\ &1, &&i\neq L\; \text{且}\; i = j \end{aligned} \right. \end{split} $$ 分块矩阵:
$$ \begin{split} &\iota_1 = [\iota_{1L},\iota_{2L},\cdots,\iota_{NL}]^{\rm{T}}\\ &\iota_2=\left[ {\begin{array}{*{20}{c}} \iota_{11}&{\dots}&\iota_{1N}\\ {\vdots}&{\ddots}& \vdots\\ \iota_{N1}&{\dots}&\iota_{NN} \end{array}} \right]\end{split} $$ 在通信拓扑情况下, 广义的编队误差可定义为:
$$ \begin{split} z_i =\; &\eta_i+\frac{l_{ij}}{l_{ii}}\sum\limits_{j=L}^N(\eta_j+E_{ij}), \;i = 1,\cdots,N,\\ &j = L,1,\cdots,N,\; i\neq j \end{split} $$ (11) 式中, $ E_{ij} $表示第$ i $条无人水面艇相对$ j $艘无人水面艇的期望位置和姿态.
本文设计控制器的目的是设计有限时间同步收敛的无人艇编队控制器, 在模型不确定性和外部干扰存在条件下, 使编队系统中无人艇的所有自由度的编队误差能在有限时间内且在同一时刻收敛到平衡点, 保证闭环系统是有限时间同步稳定的.
2. 控制器设计与稳定性分析
2.1 有限时间同步干扰观测器设计
受文献[34]启发, 根据第$ i $艘无人艇数学模型(6), 可得:
$$\left\{ \begin{aligned} \dot \eta_i& = R(\eta_i(t))\nu_i, \; \; \; \; \; \; i = L, 1, 2,\cdots,N\\ \dot \nu_i& = -\gamma_{1i}M_i^{-1}\nu_i+M_i^{-1}\tau_i+M_i^{-1}\varpi_i+\theta_i \end{aligned} \right.$$ (12) 式中, $ \varpi_i = \tau_{wi}-\Delta D_i(\nu_i)\nu_i $为外部环境干扰和模型不确定性, $ \theta_i = M_i^{-1}(\gamma_{1i}\nu_i-C_i(\nu_i)\nu_i-D_i(\nu_i)\nu_i) $, $ \gamma_{1i} $为正实数.
基于式(12), 引入不含不确定性和干扰项的辅助系统$ \dot x_a $. 辅助系统是根据$ \dot \nu_i $设计的, 去除不确定性和干扰项, 所有变量已知, 所以辅助变量$ \dot x_a $也是可测的, 方便后文计算估计误差:
$$ \begin{split} \dot x_a = -\gamma_{1i}M_i^{-1}x_a+M_i^{-1}\tau_i+\theta_i \end{split} $$ (13) 定义新的误差变量$ x_e $和输出变量$ y $:
$$ x_e = \nu_i-x_a $$ (14) $$ y = \gamma_{2i}x_e $$ (15) 式中, $ \gamma_{2i} $是正常数. 根据$ x_a $和$ y $定义, 可设计如下干扰观测器估计不确定项和外部环境干扰值:
$$ \begin{split} \hat\varpi_i = \frac{1}{\gamma_{2i}}M_i(\gamma_{1i}\gamma_{2i}M_i^{-1}\hat x_e+\dot y) \end{split} $$ (16) 式中, $ \hat x_e $是$ x_e $的估计值, 其观测器的形式为:
$$ \begin{split} \dot{\hat x}_e =\; &-\gamma_{2i}\gamma_{3i}\hat x_e+\frac{1}{\gamma_{2i}}\dot y+\gamma_{3i}y\;-\\ &\gamma_{4i}{{{\rm{sign}}_{{n}}}}(\tilde x_e)^{\beta} \end{split} $$ (17) 式中, 观测误差$ \tilde x_e = \hat x_e-x_e $, $ \gamma_{3i} $和$ \gamma_{4i} $是正的增益系数, $ \beta $是正常数, 且$ 0<\beta<1 $. ${\rm{sign}}_n$为范数符号函数, 在时间同步控制中发挥重要作用, 其表达式为[10]:
$$ \text{sign}_n(x) = \left\{ \begin{aligned} &\displaystyle{\frac{x}{\left\| x \right\|}},&x \ne 0\\ &0,&x = 0 \end{aligned} \right. $$ (18) 其指数形式为:
$$ \text{sign}_n(x)^\alpha = {\left\| x \right\|^{\alpha}}\text{sign}_n(x) $$ (19) 式中, $ \|\cdot\| $表示“·”的$ L_2 $范数, $ \alpha $是正的可调节常数.
定理 1. 通过有限时间同步干扰观测器(16), 可实现对广义不确定项$ \varpi_i $的估计, 相应估计误差$ \varpi_{ei} = \varpi_i-\hat\varpi_i $可在有限时间内收敛, 且各状态分量收敛时间同步.
证明. 根据式(12) ~ (14), 可得:
$$ \begin{split} \dot x_e = -\gamma_{1i}M_i^{-1}x_e+M_i^{-1}\varpi_i \end{split} $$ (20) 对不确定项和外界干扰$ \varpi_i $的估计误差为:
$$ \begin{split} \varpi_{ei} =\; &\hat\varpi_i-\varpi_i \;= \\ &\frac{1}{\gamma_{2i}}M_i(\gamma_{1i}\gamma_{2i}M_i^{-1}\hat x_e+\gamma_{2i}\dot x_e)\;-\\ &M_i(\dot x_e+\gamma_{1i}M_i^{-1}x_e) = \gamma_{1i}\tilde x_e \end{split} $$ (21) 结合式(15)、式(17), 可得:
$$ \begin{split} \dot{\tilde x}_e =\; &\dot{\hat x}_e-\dot x_e \;= \\ &\gamma_{3i}y-\gamma_{2i}\gamma_{3i}\hat x_e+\frac{1}{\gamma_{2i}}\dot y\;-\\ &\gamma_{4i}{{\rm{sign}}_{{n}}}(\tilde x_e)^{\beta}-\dot x_e \;= \\ &-\gamma_{2i}\gamma_{3i}\tilde x_e-\gamma_{4i}{{\rm{sign}}_{{n}}}(\tilde x_e)^{\beta} \end{split} $$ (22) 因此
$$ \dot\varpi_{ei} = \gamma_{1i}\dot{\tilde x}_e = -\gamma_{2i}\gamma_{3i}\varpi_{ei}-\gamma_{4i}\gamma_{1i}{{\rm{sign}}_{{n}}}(\varpi_{ei})^{\beta} $$ (23) 选择如下形式的李雅普诺夫函数:
$$ \begin{split} V_1 = \tilde x_e^\text{T}\tilde x_e \end{split} $$ (24) 对$ V_1 $求导, 可得:
$$ \begin{split} \dot V_1& = -2\gamma_{2i}\gamma_{3i}V_1-2\gamma_{4i}V_1^{\frac{1+\beta}{2}} \end{split} $$ (25) 由引理2可得, 系统是有限时间稳定的. 求解式(25), 可得:
$$ \begin{split} V_1\equiv0, \tilde x_e\equiv0, t\geq T_1 \end{split} $$ (26) 收敛时间为:
$$ \begin{split} T_1 = \frac{1}{\gamma_{2i}\gamma_{3i}(1-\beta)}\ln\frac{\gamma_{2i}\gamma_{3i}V_1^{\frac{1-\beta}{2}}(t_0)+\gamma_{4i}}{\gamma_{4i}} \end{split} $$ (27) 根据式(21), 可得:
$$ \varpi_{ei}\equiv0, t\geq T_1 $$ (28) 因此, 当$ t\geq T_1 $时, 干扰观测器的观测值等于实际值. 又因为:
$$ \begin{split} \frac{\dot {\tilde x}_e}{\|\dot {\tilde x}_e\|} = \frac{-\gamma_2\gamma_3\tilde x_e-\gamma_4{\rm{sign}}_n(\tilde x_e)^\beta}{\|\gamma_2\gamma_3\tilde x_e+\gamma_4{\rm{sign}}_n(\tilde x_e)^\beta\|} = \frac{\tilde x_e}{\|\tilde x_e\|} \end{split} $$ 根据时间同步稳定定义可知, 干扰观测器是时间同步稳定的.
□ 2.2 时间同步收敛编队控制器设计
对含有向通信拓扑的广义编队误差式(11)求导, 可得:
$$ \begin{split} \dot z_i =\; &\dot\eta_i+\frac{l_{ij}}{l_{ii}}\sum(\dot\eta_j(t)+\dot E_{ij}) = \\ &\dot\eta_i+\iota_{ij}\sum(\dot\eta_j+\dot E_{ij})\\ &i = 1,\cdots,N, j = L,1,\cdots,N \end{split} $$ (29) 对式(29)求导, 可得:
$$ \begin{split} \ddot z_i = \ddot\eta_i+\iota_{ij}\sum(\ddot\eta_j+\ddot E_{ij}) \end{split} $$ (30) 令$ x_1 = z_i $, $ x_2 = \dot z_i $, 误差动态方程可通过如下非线性系统进行描述:
$$ \dot x_1 = x_2 $$ (31) $$ \dot x_2 = \ddot \eta_i+\iota_{ij}\sum(\ddot\eta_j+\ddot E_{ij}) $$ (32) 首先, 基于范数符号函数构建如下滑模面:
$$ s = x_2+{{\rm{sign}}_{{n}}}(x_1)^\alpha $$ (33) 式中, $0.5 < \alpha<1$是正常数.
设计第$ i $艘无人艇编队控制器形式为:
$$ \begin{split} \overline{\tau_i} =\; &-M_i({{\rm{sign}}_{{n}}}(s)^{\alpha}+\frac{l_{ij}}{l_{ii}}\sum(\ddot\eta_j+\ddot E_{ij})\;+\\ &(\alpha-1)\|z_i\|^{\alpha-3}z_i^\text{T}z_i\dot z_i+\|z_i\|^{\alpha-1}\dot z_i)\;+\\ &(C_i+D_i)\dot\eta_i-\hat\rho_i \end{split} $$ (34) 式中, $ \hat\rho_i $为不确定项和外界干扰的估计值:
$$ \hat\rho_i = R_i(\eta_i(t))\hat\varpi_i $$ (35) 注2. 本文提出的有限时间同步控制器是基于无人艇的数学模型设计的, 控制器中需要用到研究对象的质量矩阵、科里奥利向心力矩阵和水动力阻尼矩阵, 所以在实际应用中, 应先通过水池实验或系统辨识, 获得相应的物理参数. 另外, 在忽略环境干扰和模型不确定性$ \rho_i $情况下, 控制器中待设计参数只有$ \alpha $, 极大地简化了参数调试难度, 更易于工程实现.
定理2. 对于式(9)的无人艇编队系统, 在有限时间同步干扰观测器(16)和编队控制器(34)作用下, 编队系统是有限时间同步稳定的, 编队误差可在同一时刻收敛到平衡点.
证明. 对基于范数符号函数的滑模面$ s $求微分, 可得:
$$ \begin{split} \dot s = \;&\ddot \eta_i+\frac{l_{ij}}{l_{ii}}\sum(\ddot\eta_j+\ddot E_{ij})+\|z_i\|^{\alpha-1}\dot z_i\;+\\ &(\alpha-1)\|z_i\|^{\alpha-3}z_i^{\rm T} z_i\dot z_i \end{split} $$ (36) 选择李雅普诺夫函数:
$$ V = s^\text{T}s $$ (37) 对李雅普诺夫函数求导, 并代入控制律式(34), 可得:
$$ \begin{split} \dot V =\; &2s^\text{T}\Bigg(\ddot \eta_i+ \frac{l_{ij}}{l_{ii}}\sum(\ddot\eta_j+\ddot E_{ij})\;+\\ &\|z_i\|^{\alpha-1}\dot z_i+(\alpha-1)\|z_i\|^{\alpha-3}z_i^\text{T}z_i\dot z_i\Bigg) \;= \\ &2s^\text{T}(M_i^{-1}(\overline{\tau_i}+\rho_i-C_i\dot\eta_i-D_i\dot\eta_i)\;+\\ &\frac{l_{ij}}{l_{ii}}\sum(\ddot\eta_j+\ddot E_{ij})+\|z_i\|^{\alpha-1}\dot z_i\;+\\ &(\alpha-1)\|z_i\|^{\alpha-3}z_i^\text{T}z_i\dot z_i) \;= \\ &2s^\text{T}(M_i^{-1}(\rho_i-\hat\rho_i)-{{\rm{sign}}_{{n}}}(s)^{\alpha}) \end{split} $$ (38) 因为, 干扰观测器的误差在$ t\geq T_1 $时收敛到零, 所以式(38)可写为:
$$ \begin{align} \dot V = 2s^\text{T}(-{{\rm{sign}}_{{n}}}(s)^{\alpha}) = -2V^{\frac{1+\alpha}{2}} \end{align} $$ (39) 因此, 可得到系统是有限时间稳定的, 且相应收敛时间为:
$$ \begin{split} T_2 = \frac{V^{\frac{1-\alpha}{2}}(s_0)}{1-\alpha} \end{split} $$ (40) 式中, $ s_0 $表示$ s $的初始值.
然后, 结合式(9)、式(36)和控制律式(34), 可得:
$$ \begin{split} \frac{\dot s}{\|\dot s\|} = -\frac{{{\rm{sign}}_{{n}}}(s)^\alpha}{\|{{\rm{sign}}_{{n}}}(s)^\alpha\|} = -\frac{s}{\|s\|} \end{split} $$ (41) 根据定义3, $ s $具有比例保持特性. 因此根据引理4可知, $ s $具有有限时间稳定和比例保持特性, 是有限时间同步稳定的.
当滑模面$ s $收敛到零时, 可得:
$$ x_2 = -{{\rm{sign}}_{{n}}}(x_1)^\alpha $$ (42) 选取李雅普诺夫函数:
$$ V_2 = x_1^{\rm{T}} x_1 $$ (43) 对式(43)求导, 可得:
$$ \dot V_2 = -2x_1^{{\rm T}}{ {\rm{sign}}_{{n}}}(x_1)^\alpha = -2V_2^{\frac{\alpha+1}{2}} $$ (44) 所以, $ x_1 $是有限时间稳定的, 且收敛时间为:
$$ T_3 = \frac{V^{\frac{1-\alpha}{2}}(x_1(0))}{1-\alpha} $$ (45) 又因为:
$$ \frac{\dot x_1}{\|\dot x_1\|} = \frac{x_2}{\| x_2\|} = -\frac{{{\rm{sign}}_{{n}}}(x_1)^\alpha}{\|{{\rm{sign}}_{{n}}}(x_1)^\alpha\|} = -\frac{x_1}{\|x_1\|} $$ (46) 根据引理4可知, $ x_1 $具有有限时间稳定和比例保持特性, 具有限时间同步稳定的, 且稳定时间为$ T_3 $. 因此, 编队误差$ z_1 $各状态可在有限时间内, 在时刻$ T $同时收敛到平衡点, 且$ T\leq T_1+T_2+T_3 $.
由式(46)可知:
$$ \dot x_1 = \kappa(x_1)x_1 $$ (47) 式中, $ \kappa(x_1) = -{\|\dot x_1\|}/{\|x_1\|} $.
对$ x_1 $中任意2个不为零状态$x_{1i}(t)/x_{1j}(t),\; i\neq j$求导, 可得:
$$ \frac{\mathrm{d}}{\mathrm{d}t}\bigg(\frac{x_{1i}(t)}{x_{1j}(t)}\bigg) = \frac{\dot x_{1i}(t)x_{1j}(t)-x_{1i}(t)\dot x_{1j}(t)}{x_{1j}^2(t)} $$ (48) 将$ \dot x_{1i}(t) = \kappa(x_1)x_{1i}(t) $, $ \dot x_{1j}(t) = \kappa(x_1)x_{1j}(t) $代入式(48), 可得:
$$ \frac{\mathrm{d}}{\mathrm{d}t}\left(\frac{x_{1i}(t)}{x_{1j}(t)}\right) = 0 $$ (49) 所以, $\forall x_{1i}(t), x_{1j}(t)\neq 0,\; i\neq j$, $ x_{1i}(t)/x_{1j}(t) = c_{ij} $, 式中$ c_{ij} $为非零常数, 可得:
$$ x_{1i}(t) = c_{ij}x_{1j}(t) $$ (50) 由式(44)可知, $ x_1 $在有限时间内收敛到原点, 假设$ x_1 $中任意2个不为零状态$x_{1i}(t),\; x_{1j}(t),\; i\neq j$不同时收敛, 收敛到原点的时刻分别为$ T_i $和$ T_j $且$ T_i\neq T_j $, 即$ x_{1i}(T_i) = 0 $, $ x_{1j}(T_j) = 0 $.
结合式(50), 可得:
$$ \lim\limits_{t \to T_i^-} x_{1i}(t) = 0 \Longrightarrow c_{ij}\lim\limits_{t \to T_i^-} x_{1j}(t) = 0 $$ (51) 由此可得$ x_{1j}(T_i) = 0 $, 与假设$ x_{1j}(T_j) = 0 $矛盾, 所以假设$ T_i \neq T_j $不成立, 系统的每个状态分量必然在同一时刻收敛.
□ 3. 仿真实验
本文选取3艘无人艇组成编队系统对本文提出的时间同步收敛编队控制方法进行仿真验证. 无人艇模型参数设置为[25]: $ M_i = {\rm{diag}}\{200,250, 80\} $, $ D_i = {\rm{diag}}\{70,100, 50\} $.
3艘无人艇间的通信关系如图2所示, 连接矩阵$ A $和拉普拉斯矩阵$ L $可写为:
$$ \begin{split} &A = \left[ {\begin{array}{*{20}{c}} 0\;\;&0\;\;&0\\ 1\;\;&0\;\;&1\\ 1\;\;&1\;\;&0 \end{array}} \right]\\ & L = \left[ {\begin{array}{*{20}{c}} 0&0&0\\ { - 1}&2&{ - 1}\\ { - 1}&{ - 1}&2 \end{array}} \right] \end{split} $$ 进一步, 可得有向拉普拉斯矩阵:
$$ \iota = \left[ {\begin{array}{*{20}{c}} 0&0&0\\ { - \dfrac{1}{2}}&1&{ - \dfrac{1}{2}}\\ { - \dfrac{1}{2}}&{ - \dfrac{1}{2}}&1 \end{array}} \right] $$ 领航者、跟随者1和跟随者2的初始位置和艏向角分别为$ \eta_L = [0; 0; 0] $、$ \eta_1 = [0; 30; \pi/4] $ 和$\eta_2 = [0; -30; \pi/3]$. 无人艇相对位置分别为$ E_{1L} = [0;20;0] $、$E_{12} = [0;40;0]$、$ E_{2L} = [0;-20;0] $ 和 $ E_{21} = [0;-40; 0] $. 不失一般性, 系统不确定性选取为[22]: $\Delta D \cdot\nu = [0.3u{v^2} + 0.4{v^2}r; 0.1uv; 0.2u{r^2} + 0.3ur{v^3} ]$, 外部干扰选取为:
$$ {\tau _{wi}} = \left[ \begin{array}{l} 50\sin(0.02t)\cos(t)\\ 50\sin(0.03t)\cos(0.8t)\\ 50\sin(0.03t)\cos(0.8t) \end{array} \right] $$ 设置领航者的期望轨迹为$ U $型曲线: 当$ t\leq t_1 $时, $ x(t) = {\rm{2}}t, y(t) = 0 $; 当$ {t_1} \le t \le {t_2} $时:
$$ \left\{ {\begin{aligned} &x(t) = {\rm{2}}{t_1} + 150\sin \left(\displaystyle{\frac{2}{150}}(t - {t_1})\right)\\ &y(t) = 150 - 150\cos \left(\displaystyle{\frac{2}{150}}(t - {t_1})\right) \end{aligned}} \right. $$ 对本文提出的无人艇编队控制方法仿真验证如图3 ~ 8所示. 图3为3艘在北−东坐标系下无人艇编队运动曲线, 2艘跟随无人艇由初始状态在时间同步收敛编队控制器作用下, 很快达到期望的编队队形, 到达$ U $型曲线的圆弧段时产生的交叉现象, 是因为领航者与跟随者间的相对距离$ E_{ij} $是在北−东坐标系下定义的. 图4为各无人艇运动速度变化曲线, 可以看出, 各无人艇的纵向速度稳定在$ 2 $ m/s, 横向速度为0 m/s, 艏摇角速度在直线运动时为0 rad/s, 曲线运动阶段经过短暂调整后, 各艇的角速度达到一致并稳定在$ 0.04 $ rad/s. 图5为无人艇东向位置、北向位置和艏向角变化曲线, 分析可知, 与$ U $型曲线和期望的编队距离相对应. 图6为各无人艇的编队误差曲线, $ z_{Li1} $、$ z_{Li2} $和$ z_{Li3} $分别表示纵向、横向和艏向3个自由度的误差. 图7为本文提出的有限时间同步控制方法作用下, 跟随者1和跟随者2的编队误差收敛曲线, $ z_{L11} $、$ z_{L12} $和$ z_{L13} $为跟随者1的纵向编队误差、横向编队误差和艏向误差, $ z_{L21} $、$ z_{L22} $和$ z_{L23} $为跟随者2的纵向编队误差、横向编队误差和艏向误差. 由图7可以看出, 虽然每艘无人艇各自由度的初始状态不同, 但是在本文提出的时间同步收敛编队控制器作用下, 在10.5 s左右, 2艘无人艇的所有自由度编队误差同时收敛到平衡点; 接着, 在第100 s进入$ U $型曲线的圆弧段; 在170 s左右, 2艘无人艇的所有自由度编队误差又同时收敛到平衡点, 验证了本文算法的有效性. 图8为跟随者1在3个自由度方向的外界环境干扰和模型不确定性的实际值与估计值. 由图8可以看出, 估计值迅速收敛到实际值, 验证了干扰观测器的有效性.
 图 5 各无人艇位置和艏向角变化曲线Fig. 5 Position and heading variation curve of each unmanned surface vehicles
图 5 各无人艇位置和艏向角变化曲线Fig. 5 Position and heading variation curve of each unmanned surface vehicles 图 7 无人艇编队位姿误差在同一时刻收敛曲线Fig. 7 Formation position and attitude-error convergence curve of all degrees of freedom formation errors at the same time
图 7 无人艇编队位姿误差在同一时刻收敛曲线Fig. 7 Formation position and attitude-error convergence curve of all degrees of freedom formation errors at the same time 图 8 跟随者 1 在 3 个自由度方向的外界环境干扰和模型不确定性实际值与估计值Fig. 8 Actual and estimated-values of external disturbances and model uncertainties for follower 1 in three degrees of freedom
图 8 跟随者 1 在 3 个自由度方向的外界环境干扰和模型不确定性实际值与估计值Fig. 8 Actual and estimated-values of external disturbances and model uncertainties for follower 1 in three degrees of freedom下面进一步验证本文提出的有限时间同步控制器的有效性和优势. 首先, 改变艇的初始点, 为了使对比更明显, 保持领航者和跟随者2的初始点不变, $ \eta_L = [0; 0; 0] $, $ \eta_2 = [0; -30; \pi/3] $, 增大跟随者1的初始误差, 并将跟随者1的初始点改为$ \eta_1 = [2; 40; \pi/4] $. 控制器参数不改变. 编队系统各状态分量误差曲线如图9所示, 坐标放大到$ 10^{-3} $. 比较图9和图7可以看出, 尽管2个仿真案例中跟随者1的初始误差不同, 系统的各状态分量仍能同步收敛到平衡点.
 图 9 改变初始值编队位姿误差收敛曲线Fig. 9 Formation position and attitude-error convergence curve in the situation of the initial values changed
图 9 改变初始值编队位姿误差收敛曲线Fig. 9 Formation position and attitude-error convergence curve in the situation of the initial values changed注3. 值得注意的是, 由于增大了跟随者1的初始误差, 导致整个编队系统收敛到平衡点的同步时间延长了, 说明实现时间同步控制是有代价的, 收敛较快状态会等待收敛较慢状态. 在实际工程应用中, 编队系统在集结执行饱和打击任务时, 距离编队期望点较近的无人艇慢速移动等待快速移动的距离期望点较远的无人艇, 防止过早到达目标点, 这也是符合期望的.
然后, 将本文提出的有限时间同步控制方法与文献[25]提出的基于符号函数的有限时间非线性滑模控制方法进行比较.
无人艇编队有限时间非线性滑模控制器设计为:
$$ \begin{split} {u_i} =\; & - {\iota _{iL}}{{\ddot \eta }_L} - {{{l_{ij}}} \over {{l_{ii}}}}\sum {{{\ddot E}_{ij}} - {1 \over 2}{C_i}{p_i}({z_i},{{\dot z}_i})}\;- \\ &{K_i}\text{sign}({\sigma_i}) \end{split} $$ (52) 滑模面$ {\sigma _i} $设计为$ {\sigma _i}({z_i}, {\dot z_i}) = {\dot z_i} + {C_i}{H_i}({z_i}){\left| {{z_i}} \right|^{{1 \over 2}}} $, 其中$ {C_i} = {{\rm{diag}}}\{{c_{i1}},{c_{i2}},{c_{i3}}\} $, ${H_i}({z_i}) = {{\rm{diag}}}\{{\rm{sign}}({z_{i1}}), {\rm{sign}}({z_{i2}}),{\rm{sign}}({z_{i3}})\}$, $ {\rm{sign}} $为符号函数, 其取值为$ -1 $、$ 0 $或$ 1 $. 控制参数选取为: $ {K_1} = {K_2} = {{\rm{diag}}}\{2,2,2\} $, $ {C_1} = {C_2} = {{\rm{diag}}}\{2,2,2\} $.
线性滑模控制器设计为:
$$ \begin{split} {u_i} = - {\iota _{iL}}{{\ddot \eta }_L} - {{{l_{ij}}} \over {{l_{ii}}}}\sum {{{\ddot E}_{ij}} - {C_i}{{\dot z}_i}} - {K_i}{\rm{sign}}({\sigma _{lsmi}}) \end{split} $$ (53) 式中, 滑模面$ {\sigma _{lsmi}} = {\dot z_i} + {C_i}{z_i} $.
使用文献[25]提出的基于符号函数的有限时间滑模控制方法和线性滑模控制方法, 编队中无人艇的各自由度编队误差收敛曲线如图10和图11所示. 由图10可以看出, 虽然编队误差在有限时间内能够收敛, 但各自由度收敛的时间先后不同, 初始误差小的状态分量$ z_{L11} $和$ z_{L21} $很快到达平衡点, 而状态分量$ z_{L12} $和$ z_{L22} $初始误差为$ 15 $和$ -15 $, 由于初始误差较大, 所以其收敛时间远大于$ z_{L11} $和$ z_{L21} $. 同理, 由图11可以看出, 各状态分量由于初始误差不同, 收敛到平衡点的时间也不同. 通过与图7的对比可以看出, 尽管各状态分量初始误差不同, 但是在有限时间同步控制方法的作用下, 各状态分量收敛到平衡点的时间相同, 从而验证了本文算法的优越性.
 图 10 基于符号函数的有限时间非线性滑模控制编队位姿误差收敛曲线[25]Fig. 10 Formation position and attitude-error convergence curve of finite time nonlinear sliding mode control error based on sign function[25]
图 10 基于符号函数的有限时间非线性滑模控制编队位姿误差收敛曲线[25]Fig. 10 Formation position and attitude-error convergence curve of finite time nonlinear sliding mode control error based on sign function[25] 图 11 线性滑模控制的编队位姿误差收敛曲线Fig. 11 Formation position and attitude-error convergence curve of linear sliding mode control
图 11 线性滑模控制的编队位姿误差收敛曲线Fig. 11 Formation position and attitude-error convergence curve of linear sliding mode control为了验证本文有限时间同步干扰观测器的优越性, 将本文干扰观测器与文献[21]的超螺旋干扰观测器作比较, 观测器设计为:
$$ \left\{\begin{aligned} \dot z_0=\;&-k_{o1}\frac{z_0-X_i}{\|z_0-X_i\|^{\frac{1}{2}}}-k_{o2}(z_0-X_i)\;+\\ &f(X_i)X_i+H_i\left[ {\begin{array}{*{20}{c}} {{{\boldsymbol{0}}_{3 \times 1}}} \\ {\tau_i} \end{array}} \right]+z_1 \\ \dot z_1=\;&-k_{o3}\frac{z_0-X_i}{\|z_0-X_i\|}-k_{o4}(z_0-X_i) \end{aligned}\right.$$ (54) 式中, $ z_1 $为估计值, $ X_i = [x_i,y_i,\psi_i,u_i,v_i,r_i]^\text{T} $.
$$ \begin{split} &f(X_i) = \left[ {\begin{array}{*{20}{c}} {{\boldsymbol{0}}_{3 \times 3}}& {R_i(\psi_i )}\\ {{{\boldsymbol{0}}_{3 \times 3}}} & {{M_i^{ - 1}}( - C _i- D_i)} \end{array}} \right]\\ & H = \left[ {\begin{array}{*{20}{c}} {{{\boldsymbol{0}}_{3 \times 3}}} \\ {M_i^{ - 1}} \end{array}} \right] \end{split} $$ 超螺旋干扰观测器的参数设置为$k_{o1} = 1, k_{o2} = 5, k_{o3} = 1, k_{o4} = 2$. 通过比较图12和图8可以看出, 虽然经过参数调整后文献[21]的超螺旋干扰观测器观测值跟踪上了实际值, 但是在矩形方框内存在振荡.

注4. 通过多组仿真实验对比可以发现, 当外部干扰的幅值或频率发生变化之后, 本文设计的有限时间干扰观测器在参数不调整的情况下, 相比文献[21]的超螺旋干扰观测器能获得较好的性能. 另外, 相比文献[22]的干扰观测器, 本文给出了时间同步稳定性的理论分析.
4. 结束语
本文研究了无人艇编队有限时间控制中各艇误差收敛不同步以及传统干扰观测器与时间同步控制框架不兼容的问题. 给出了时间同步稳定性的定义和判定方法, 提出一种有限时间同步干扰观测器用来解决编队系统的模型不确定性和外界环境干扰, 并且可有效地兼容时间同步稳定性. 利用图论建立无人艇之间的通信拓扑关系, 构建广义编队误差, 并基于范数符号函数的性质, 结合滑模控制方法以及比例保持特性, 提出时间同步收敛的无人艇编队控制器, 可保证不同初始状态无人艇的各自由度、所有误差在同一时刻收敛到平衡点, 控制器中需要调整的参数较少, 有利于工程实践. 最后, 通过仿真实验, 验证了本文的时间同步收敛编队控制方法的有效性和优越性. 该时间同步收敛编队控制方法也可应用于无人机编队、多机械臂协同等多智能体控制以及智能机器人的轨迹跟踪、路径跟随等单体控制中.
-

图 11 本文方法航迹倾角子系统控制指令曲线
Fig. 11 Curves of flight path angle subsystem control commands under proposed method
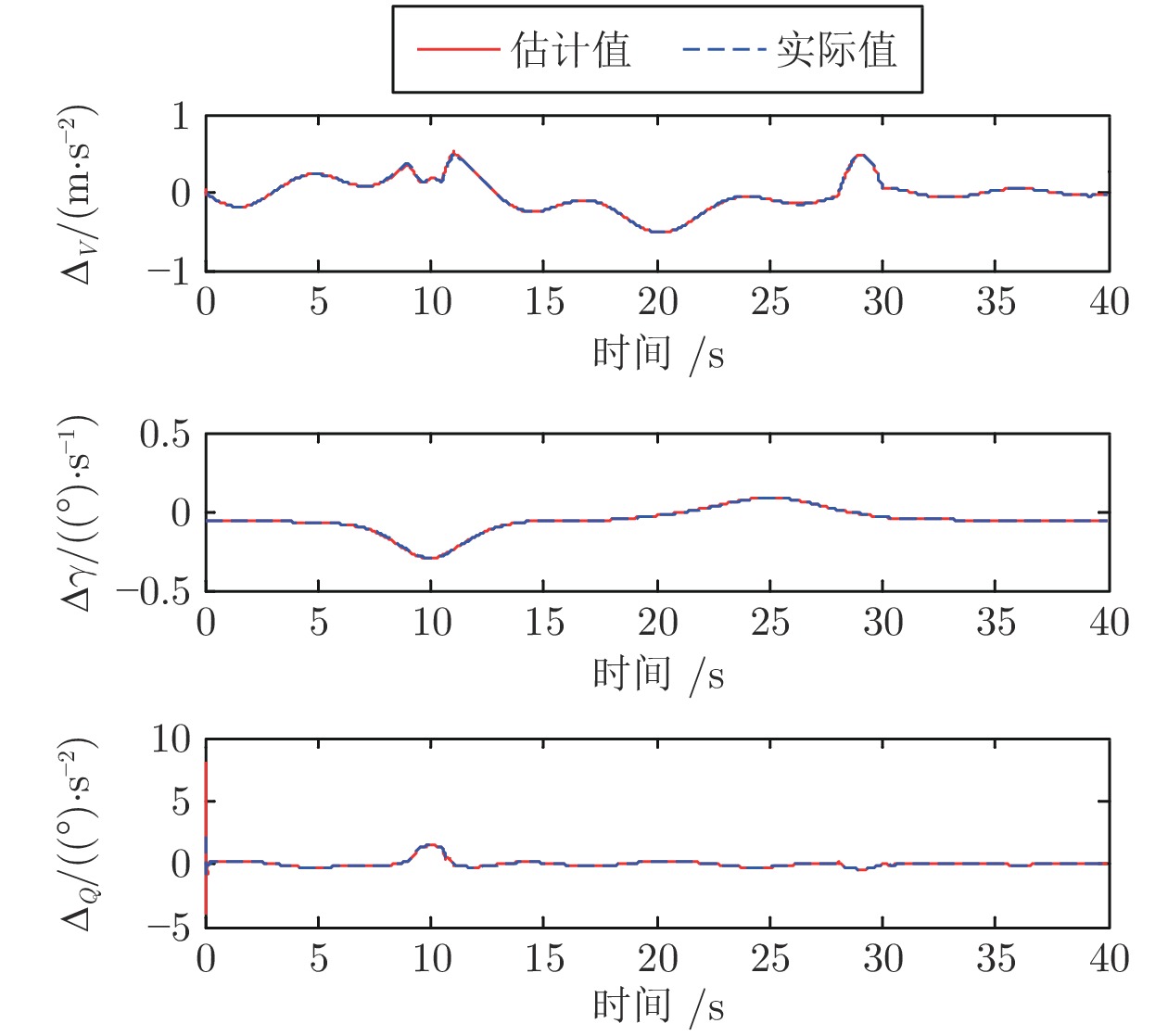
图 12 本文方法总干扰项估计曲线
Fig. 12 Estimated curves of the lumped disturbances under proposed method

图 13 本文方法抗饱和补偿信号曲线
Fig. 13 Curves of anti-windup compensated signals under proposed method
表 1 控制量的容许范围
Table 1 Admissible ranges for control inputs
飞行状态/控制量 容许范围 $\phi $ [0.1, 1.2] ${\delta _{\rm{e}}}$ [−15°, 15°] ${\delta _{\rm{c}}}$ [−27°, 27°]  下载: 导出CSV
下载: 导出CSV
表 2 控制器参数设置
Table 2 Parameter settings of controllers
控制方法 控制器参数 本文方法 $\begin{aligned} {k_V} = 5,{k_\gamma } = 1.5,{k_\theta } = {k_Q} = 5,{k_1} = 10,{k_2} = 10, \\ {R_H} = 100,{a_{H1} } = {a_{H2} } = 6,{a_{H3} } = 4,{R_V} = 100,\;\; \\ {R_\theta } = {R_{Qc} } = 10,{R_Q} = 50,{a_{V1} } = {a_{V2} } = 5,\;\;\;\; \qquad\\ {a_{\theta 1} } = {a_{Qc1} } = {a_{Q1} } = {a_{\theta 2} } = {a_{Qc2} } = {a_{Q2} } = 5.\qquad \end{aligned}$ 对比方法[17] $\begin{aligned} { {k'}_1} = 5,{k_1} = 1.5,{k_2} = {k_3} = 5,\varepsilon = \varepsilon ' = 0.25, \;\;\;\;\;\\ \iota = \iota ' = 0.5,{M_0} = 15,{ {M'}_0} = 1.2, \qquad\qquad\qquad\;\;\;\;\\ {\mu _{i1} } = {\mu _{i2} } = 1,i = 2,3,{\theta _{j1} } = {\theta _{j2} } = 1,j = 1,2,3, \\ \theta _1^{'} = \theta _2^{'} = 10,\Delta {t_1} = \Delta {t_2} = \Delta {t_3} = 0.2.\qquad\qquad\;\; \end{aligned}$
下载: 导出CSV
-
[1] 罗艺, 谭贤四, 王红, 曲智国. 基于信息几何的高超声速飞行器搜索方法. 自动化学报, 48(6): 1520−1529Luo Yi, Tan Xian-Si, Wang Hong, Qu Zhi-Guo. Search method for hypersonic vehicle based on information geometry. Acta Automatica Sinica, 48(6): 1520−1529 [2] 赵良玉, 雍恩米, 王波兰. 反临近空间高超声速飞行器若干研究进展. 宇航学报, 2020, 41(10): 1239-1250Zhao Liang-Yu, Yong En-Mi, Wang Bo-Lan. Some achievements on interception of near space hypersonic vehicles. Journal of Astronautics, 2020, 41(10): 1239-1250 [3] 路遥, 贾志强, 刘晓东, 路坤锋. 高超声速飞行器无在线求导backstepping控制方法. 宇航学报, 2022, 43(1): 103-110 Lu Yao, Jia Zhi-Qiang, Liu Xiao-Dong, Lu Kun-Feng. Backstepping Control for Hypersonic Vehicles without Online Differentiation. Journal of Astronautics, 2022, 43(1): 103-110> [4] 刘凯, 郭健, 周文雅, 佘志勇. 吸气式组合动力高超声速飞行器上升段制导方法研究. 宇航学报, 2020, 41(8): 1023-1031Liu Kai, Guo Jian, Zhou Wen-Ya, She Zhi-Yong. Investigation on ascent guidance law for air-breathing combined-cycle hypersonic vehicle. Journal of Astronautics, 2020, 41(8): 1023-1031 [5] 汤佳骏, 刘燕斌, 曹瑞, 陆宇平, 朱鸿绪, 衣春轮. 吸气式高超声速飞行器爬升段关键任务点的鲁棒优化. 宇航学报, 2020, 41(5): 507-520Tang Jia-Jun, Liu Yan-Bin, Cao Rui, Lu Yu-Ping, Zhu Hong-Xu, Yi Chun-Lun. Robust optimization of key mission points in climbing phase for air-breathing hypersonic vehicle. Journal of Astronautics, 2020, 41(5): 507-520 [6] Mannava A, Serrani A. A modular adaptive control design with ISS analysis for nonminimum phase hypersonic vehicle models. International Journal of Adaptive Control and Signal Processing, 2018, 32(6): 816-838 doi: 10.1002/acs.2869 [7] Hu Q L, Meng Y, Wang C L, Zhang Y M. Adaptive backstepping control for air-breathing hypersonic vehicles with input nonlinearities. Aerospace Science and Technology, 2018, 73: 289-299 doi: 10.1016/j.ast.2017.12.001 [8] Lu Y. Disturbance observer-based backstepping control for hypersonic flight vehicles without use of measured flight path angle. Chinese Journal of Aeronautics, 2021, 34(2): 396−406 [9] Basin M V, Yu P, Shtessel Y B. Hypersonic missile adaptive sliding mode control using finite-and-fixed-time observers. IEEE Transactions on Industrial Electronics, 2018, 65(1): 930-941 doi: 10.1109/TIE.2017.2701776 [10] Sachan K, Padhi R. Nonlinear robust neuro-adaptive flight control for hypersonic vehicles with state constraints. Control Engineering Practice, 2020, 102: 104526 doi: 10.1016/j.conengprac.2020.104526 [11] 曾喆昭, 刘文珏. 自耦PID控制器. 自动化学报, 2021, 47(2): 404-422Zeng Zhe-Zhao, Liu Wen-Jue. Self-coupling PID controllers. Acta Automatica Sinica, 2021, 47(2): 404-422 [12] Ghavidel H F. A modeling error-based adaptive fuzzy observer approach with input saturation analysis for robust control of affine and non-affine systems. Soft Computing, 2020, 24(3): 1717-1735 doi: 10.1007/s00500-019-03999-0 [13] Gil P, Oliveira T, Palma L. Adaptive neuro-fuzzy control for discrete-time nonaffine nonlinear systems. IEEE Transactions on Fuzzy Systems, 2019, 27(8): 1602-1615 doi: 10.1109/TFUZZ.2018.2883540 [14] Ghavidel H F, Kalat A A. Observer-based hybrid adaptive fuzzy control for affine and nonaffine uncertain nonlinear systems. Neural Computing & Applications, 2018, 30(4): 1187-1202 [15] Ran M P, Wang Q, Dong C Y. Active disturbance rejection control for uncertain nonaffine-in-control nonlinear systems. IEEE Transactions on Automatic Control, 2017, 62(11): 5830-5836 doi: 10.1109/TAC.2016.2641980 [16] Zhang S, Wang Q, Dong C Y. Extended state observer based control for generic hypersonic vehicles with nonaffine-in-control character. ISA Transactions, 2018, 80: 127-136 doi: 10.1016/j.isatra.2018.05.020 [17] Liu Y A, Wang Q, Hu C H, Dong C Y. ESO-based fault-tolerant anti-disturbance control for air-breathing hypersonic vehicles with variable geometry inlet. Nonlinear Dynamics, 2019, 98: 2293-2308 doi: 10.1007/s11071-019-05329-3 [18] Bu X W. Guaranteeing prescribed output tracking performance for air-breathing hypersonic vehicles via non-affine back-stepping control design. Nonlinear Dynamics, 2018, 91: 525-538 doi: 10.1007/s11071-017-3887-1 [19] Wang Y H, Chen M, Wu Q X, Zhang J. Fuzzy adaptive non-affine attitude tracking control for a generic hypersonic flight vehicle. Aerospace Science and Technology, 2018, 80: 56-66 doi: 10.1016/j.ast.2018.06.033 [20] 路遥, 刘晓东, 路坤锋. 一种非仿射高超声速飞行器姿态控制方法. 宇航学报, 2021, 42(1): 132-140Lu Yao, Liu Xiao-Dong, Lu Kun-Feng. An attitude control method for non-affine hypersonic flight vehicles. Journal of Astronautics, 2021, 42(1): 132-140 [21] Wang Y Y, Hu J B. Improved prescribed performance control for air-breathing hypersonic vehicles with unknown deadzone input nonlinearity. ISA Transactions, 2018, 79: 95-107 doi: 10.1016/j.isatra.2018.05.008 [22] Bu X W. Guaranteeing prescribed performance for air-breathing hypersonic vehicles via an adaptive non-affine tracking controller. Acta Astronautica, 2018, 151: 368-379 doi: 10.1016/j.actaastro.2018.06.041 [23] Zong Q, Ji Y H, Zeng F L, Liu H L. Output feedback back-stepping control for a generic hypersonic vehicle via small-gain theorem. Aerospace Science and Technology, 2012, 23: 409-417 doi: 10.1016/j.ast.2011.09.012 [24] Sun J L, Yi J Q, Pu Z Q, Liu Z. Adaptive fuzzy nonsmooth backstepping output-feedback control for hypersonic vehicles with finite-time convergence. IEEE Transactions on Fuzzy System, 2020, 28(10): 2320-2334 doi: 10.1109/TFUZZ.2019.2934934 [25] Tian J Y, Zhang S F, Zhang Y H, Li T. Active disturbance rejection control based robust output feedback autopilot design for airbreathing hypersonic vehicles. ISA Transactions, 2018, 74: 45-59 doi: 10.1016/j.isatra.2018.01.002 [26] He J J, Qi R Y, Jiang B, Qian J S. Adaptive output feedback fault-tolerant control design for hypersonic flight vehicles. Journal of the Franklin Institute, 2015, 352: 1811-1835 doi: 10.1016/j.jfranklin.2015.01.016 [27] Rodriguez A A, Dickeson J J, Chifdaloz O, McCullen R, Benavides J, Sridharan S, et al. Modeling and control of scramjet-powered hypersonic vehicles: challenges, trends, and tradeoffs. In: Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu, USA: AIAA, 2008. 1−40 [28] Stephen A W, Timothy R M. Measurement Uncertainty and Feasibility Study of a Flush Airdata System for a Hypersonic Flight Experiment. NASA TM-4627, USA, 1994 [29] Parker J T, Serrani A, Yurkovich S, et al. Control-oriented modeling of an air-breathing hypersonic vehicle. Journal of Guidance, Control, and Dynamics, 2007, 30(3): 857-869 [30] Wang X H, Chen Z Q, Yuan Z Z. Design and analysis for new discrete tracking-differentiators. Applied Mathematics-A Journal of Chinese Universities Series B, 2003, 18(2): 214-222 doi: 10.1007/s11766-003-0027-0 期刊类型引用(7)
1. 李鹤宇,王建斌,张锐,宋峰. 面向机动目标的设定时间多约束协同制导律. 自动化学报. 2025(01): 104-116 .  本站查看
本站查看2. 赵昱宇,索超,王雨潇. 基于微分平坦的高超声速飞行器跟踪控制方法. 系统工程与电子技术. 2024(03): 1084-1092 . 百度学术3. 方霞. 基于改进樽海鞘群算法的飞行器航迹自适应控制系统设计. 计算机测量与控制. 2024(08): 145-152 . 百度学术4. 王雨潇,丰航,赵昱宇,孙明玮. 非最小相位高超声速飞行器的动态滑模镇定控制. 国防科技大学学报. 2024(05): 54-64 . 百度学术5. 李鹤宇,王建斌,张锐,宋峰. 具有时间和角度约束的欠驱动三维协同制导律. 宇航学报. 2024(10): 1633-1644 . 百度学术6. 刘静文,蔡光斌,凡永华,樊红东,吴彤,尚逸鸣. 融合DDQN与示教学习的高超声速飞行器智能姿态控制方法研究. 航空兵器. 2024(06): 50-56 . 百度学术7. 路遥,贾志强,刘晓东,路坤锋. 高超声速飞行器无在线求导backstepping控制方法. 宇航学报. 2022(01): 103-110 . 百度学术其他类型引用(3)
-

 下载:
下载:







计量
- 文章访问数: 1262
- HTML全文浏览量: 774
- PDF下载量: 215
- 被引次数: 10
