

Operation and Maintenance of High-speed Railway Signaling System: Hierarchical Structure Model
-
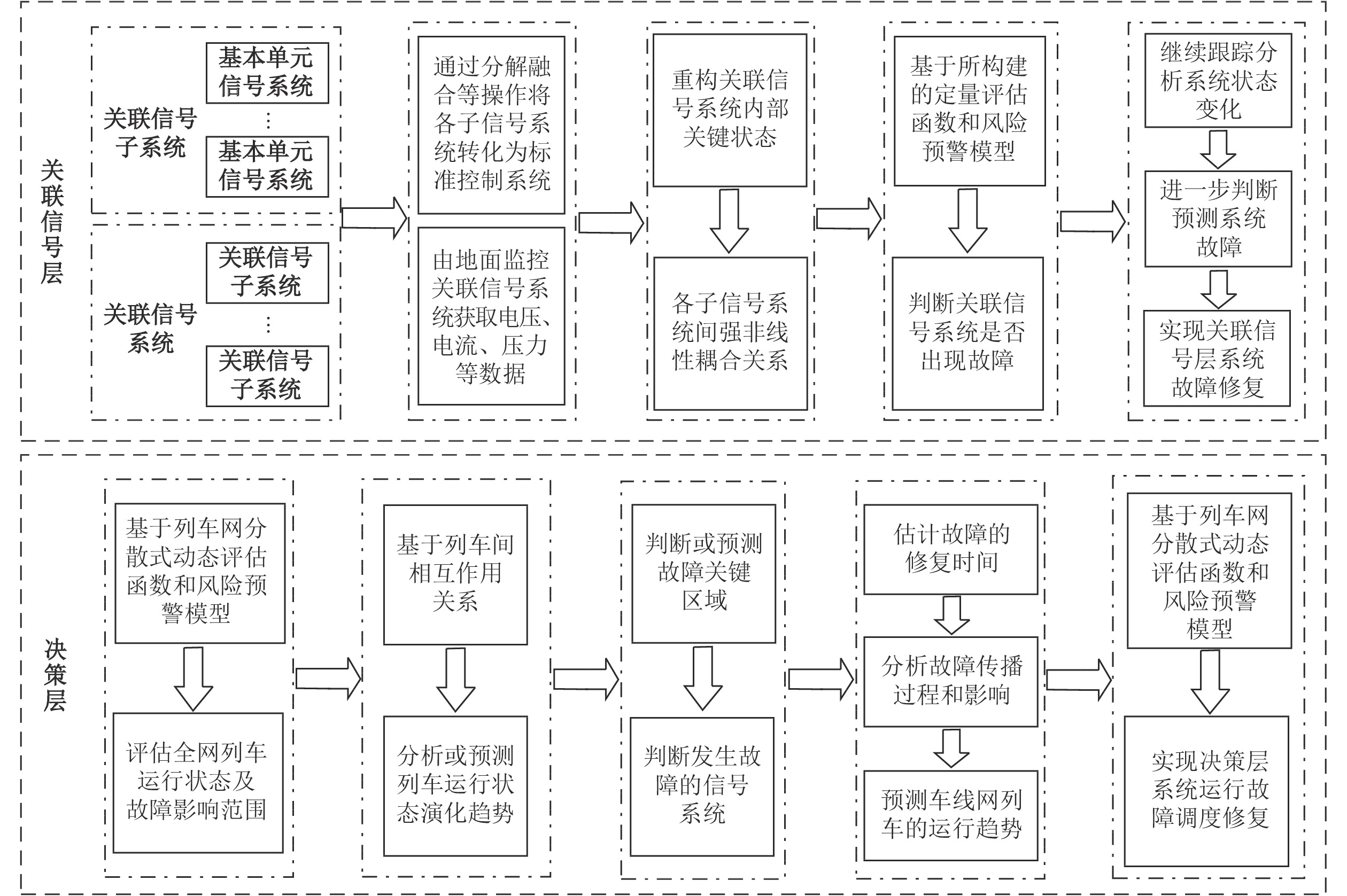
摘要: 高速铁路信号系统是高速铁路安全可靠运营的核心装备, 实现高速铁路信号系统智能运维是降低高速铁路运行风险的必要基础保障. 目前, 我国高速铁路信号系统运维研究工作主要集中于器件级系统或基本单元系统, 系统层面的相关研究几乎为空白, 亟需从整体上建立全局架构理论模型. 为此, 定义了关联信号系统, 提出了分散式动态评估函数, 将动态调度纳入运维体系, 构建了分层架构模型. 在此基础上, 针对分层架构模型的决策层和关联信号层, 提出了动态定量评估、动态风险预警和故障诊断的研究方法, 并展望了所面临的挑战.
-
关键词:
- 高速铁路信号系统运维 /
- 分层架构模型 /
- 定量评估 /
- 风险预警 /
- 故障诊断
Abstract: The high-speed railway signaling system is the core equipment for the safe and reliable operation of high-speed railway. The realization of intelligent operation and maintenance of high-speed railway signaling systems is the fundamental guarantee to reduce the operation risk of high-speed railway. However, the research on the operation and maintenance of high-speed railway signaling systems is still in early stage. Most of existing works were concerned about the systems in device level or the most basic level and few works focused on the whole system. There is a tremendous need to set up theoretical model of global structure on the whole. In this paper, we first define a concept of interrelated signaling system, propose a decentralized dynamic evaluation function and incorporate dynamic scheduling into the operation and maintenance system, based on which we construct a hierarchical structure model for high-speed railway signaling systems. After that, we give some research methods of dynamic quantitative evaluation, dynamic risk early warning and fault diagnosis for the decision-making layer and interrelated-signaling layer of hierarchical structure model, and finally discuss the challenges in these aspects.1) 收稿日期 2021-02-01 录用日期 2021-03-19 Manuscript received February 1, 2021; accepted March 19, 2021 国家自然科学基金 (61790572, 61790573, 61790575, 61925302, 61903021), 111 引智计划 (B17048), 中南大学中央高校基本科研业务费专项资金 (2020zzts575) 资助 Supported by National Natural Science Foundation of China (61790572, 61790573, 61790575, 61925302, 61903021), 111 Project (B17048), Fundamental Research Funds for the Central Universities of Central South University (2020zzts575) 本文责任编委 杨涛 Recommended by Associate Editor YANG Tao 1. 中南大学自动化学院 长沙 410083 2. 中国铁道科学研究院集团有限公司通信信号研究所 北京 100081 3. 北京交通大学轨道交通控制与安全国家重点实验室 北京 100044 4. 北京交通大学电子信息工程学院 北京 100044 1. School of Automation, Central South University, Changsha 410083 2. Signal and Communication Research Institute, China2) Academy of Railway Sciences Corporation Limited, Beijing 1000813. State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044 4. School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing 100044 -
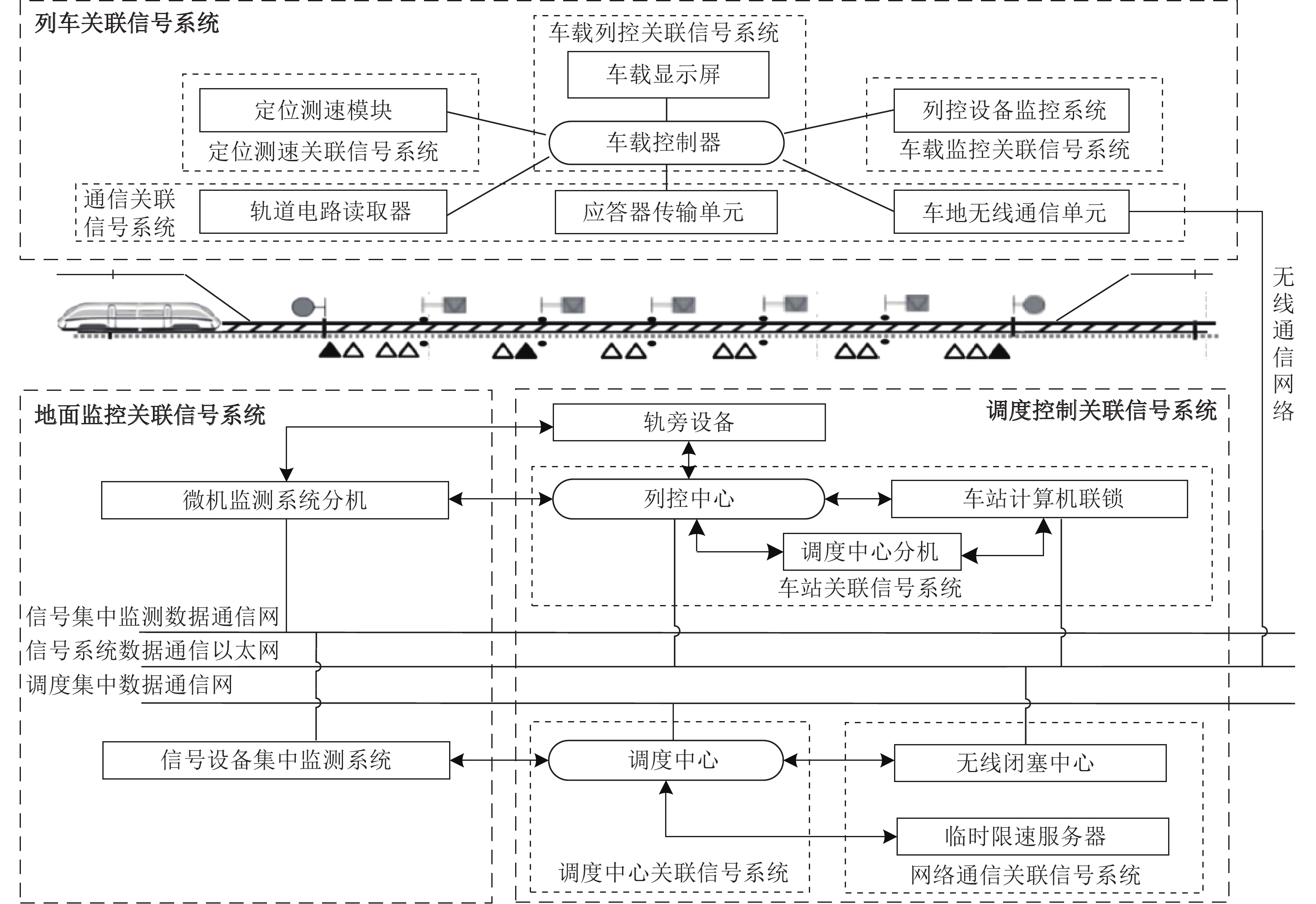
图 2 高速铁路信号系统的分层架构模型框图
Fig. 2 The hierarchical structure model of high-speed railway signaling system
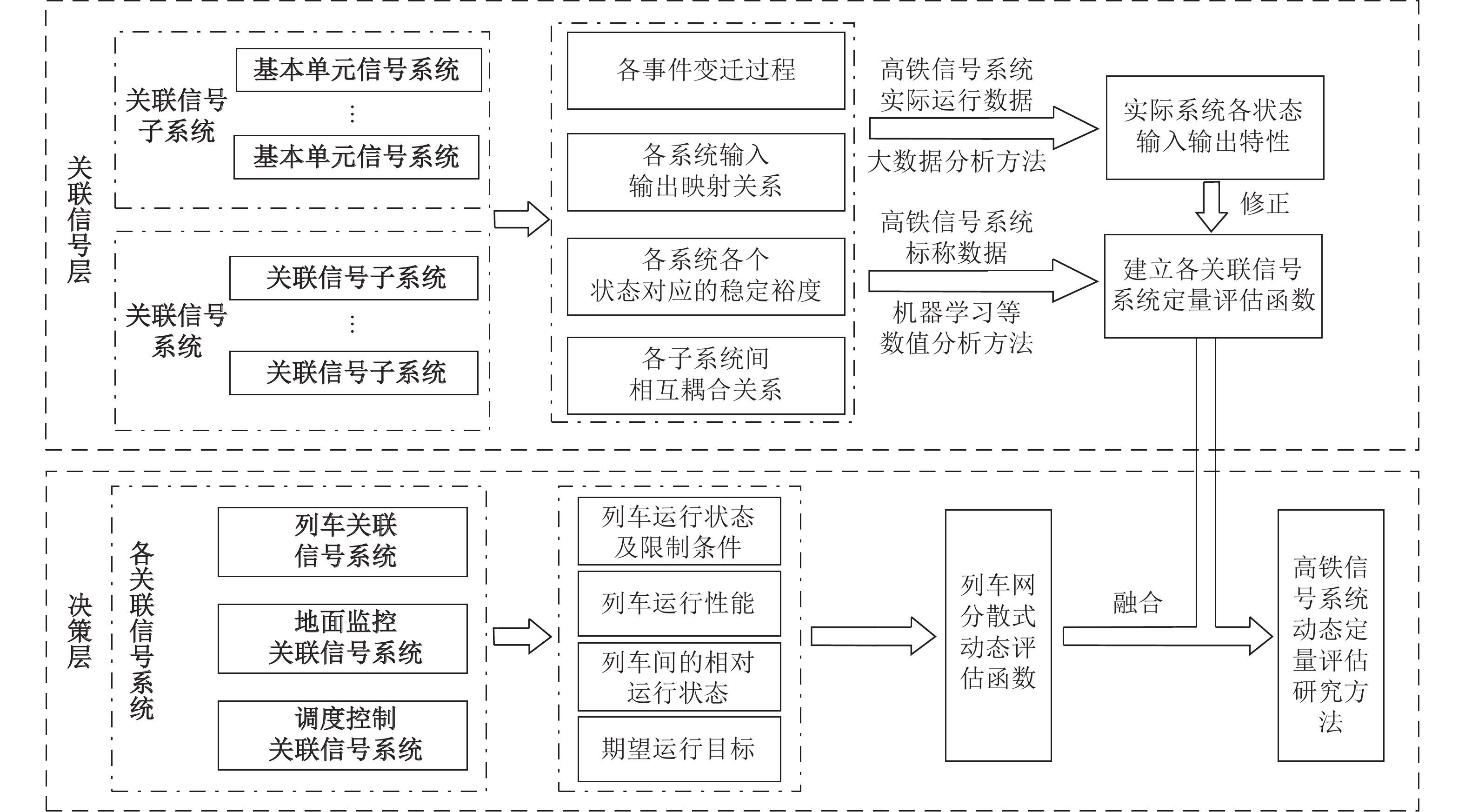
图 3 高速铁路信号系统动态定量评估研究方法
Fig. 3 The dynamic quantitative evaluation of high-speed railway signaling system
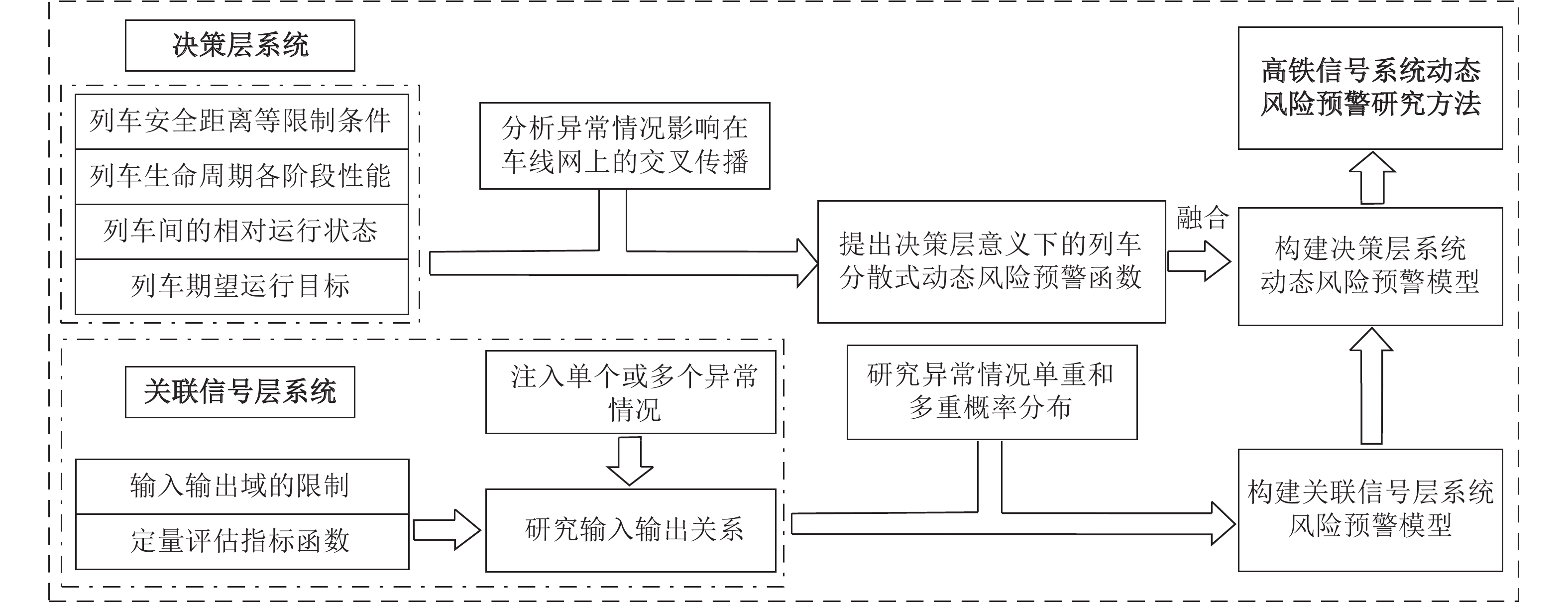
图 4 高速铁路信号系统动态风险预警研究方法
Fig. 4 The dynamic risk early warning of high-speed railway signaling system
-
[1] 林仲洪, 杨瑛, 田亚明. 从京沪高铁看高铁经济的重要作用. 铁道经济研究, 2017, 135(1): 1-9 doi: 10.3969/j.issn.1004-9746.2017.01.001Lin Zhong-Hong, Yang Ying, Tian Ya-Ming. Research on the eonomic function of high-speed railway: A case study of Beijing-Shanghai high-speed railway. Railway Economics Research, 2017, 135(1): 1-9 doi: 10.3969/j.issn.1004-9746.2017.01.001 [2] 王峰. 我国高速铁路智能建造技术发展实践与展望. 中国铁路, 2019, 04: 1-7Wang Feng. Development of China's intelligent HSR building technology and its future. Chinese Railways, 2019, 04: 1-7 [3] 何天祥, 黄琳雅. 高铁网络对湖南区域经济协同发展影响. 地理科学, 2020, 40(09): 1439-1449He Tian-Xiang, Huang Lin-Ya. Impact of high-speed rail network on regional economic coordinated development in Hunan province based on empirical analysis. Scientia Geographica Sinica, 2020, 40(9): 1439-1449 [4] 李映红. 高速铁路信号系统. 成都: 西南交通大学出版社, 2009.Li Ying-Hong. High-speed Railway Signaling System. Chengdu: Southwest Jiaotong University Press, 2009. [5] 姜楠. 高速铁路信号系统安全性改进探索. 铁路通信信号工程技术, 2018, 15(1): 59-64Jiang Nan. Discussion on improvement of high-speed railway signaling system safety. Railway Signalling & Communication Engineering, 2018, 15(1): 59-64 [6] 郭进, 张亚东. 中国高速铁路信号系统分析与思考. 北京交通大学学报, 2012, 36(5): 90-94 doi: 10.3969/j.issn.1673-0291.2012.05.016Guo Jin, Zhang Ya-Dong. Study and consideration on Chinese high-speed railway signaling system. Journal of Beijing Jiaotong University, 2012, 36(5): 90-94 doi: 10.3969/j.issn.1673-0291.2012.05.016 [7] 宁滨, 莫志松, 李开成. 高速铁路信号系统智能技术应用及发展. 铁道学报, 2019, 41(03): 1-9Ning Bin, Mo Zhi-Song, Li Kai-Cheng. Application and development of intelligent technologies for high-speed railway signaling system. Journal of the China Railway Society, 2019, 41(3): 1-9 [8] 宁滨, 董海荣, 郑伟, 荀径, 高士根, 王洪伟, 孟令云, 李浥东. 高速铁路运行控制与动态调度一体化的现状与展望. 自动化学报, 2019, 45(12): 2208-2217Ning Bin, Dong Hai-Rong, Zheng Wei, Xun Jing, Gao Shi-Gen, Wang Hong-Wei, Meng Ling-Yun, Li Yi-Dong. Integration of train control and online rescheduling for high-speed railways: challenges and future. Acta Automatica Sinica, 2019, 45(12): 2208-2217 [9] Delorme X, Gandibleux X, Rodriguez J. Stability evaluation of a railway timetable at station level. European Journal of Operational Research, 2009, 195(3): 780-790 doi: 10.1016/j.ejor.2007.06.062 [10] Sapori E, Sciutto M, Sciutto G. A quantitative approach to risk management in critical infrastructures. Transportation Research Procedia, 2014, 3: 740-749 doi: 10.1016/j.trpro.2014.10.053 [11] Liu C, Yang S, Cui Y, Yang Y X. An improved risk assessment method based on a comprehensive weighting algorithm in railway signaling safety analysis. Safety Science, 2020, 128: Article No. 104768 [12] Dong S K, Dong H B, Wan C Y. Development and evaluation of a computer-aided system for analyzing human error in railway operations, Reliability Engineering & System Safety, 2010, 95: 87-98 [13] Ding Y, Lin Y, Peng R, Zuo M. Approximate reliability evaluation of large-scale multistate series-parallel systems. IEEE Transactions on Reliability, 2019, 68(2): 539-553 doi: 10.1109/TR.2019.2898459 [14] 宋彤, 周妍. 基于系统分析的控制系统故障树自动生成. 系统工程理论方法应用, 2005, 14(6): 514-518, 526Song Tong, Zhou Yan. Automatic synthesis of fault tree for control systems based on system analysis. Systems Engineering-Theory Methodology Applications, 2005, 14(6): 514-518, 526 [15] Kyriakidis M, Majumdar A, Ochieng W Y. The human performance railway operational index-a novel approach to assess human performance for railway operations. Reliability Engineering & System Safety, 2018, 170: 226-243 [16] Wang R, Work D B. Data driven approaches for passenger train delay estimation. In: Proceedings of the 18th IEEE International Conference on Intelligent Transportation Systems. Gran Canaria, Spain: IEEE, 2015. 535−540 [17] 刘昊俣, 贺诗波, 陈积明. 数据驱动的高速铁路强风报警自适应解除策略. 自动化学报, 2019, 45(12): 2242-2250Liu Hao-Yu, He Shi-Bo, Chen Ji-Ming. Data-driven adaptive adjustment strategy for strong wind alarm in high-speed railway. Acta Automatica Sinica, 2019, 45(12): 2242-2250 [18] 张琦, 陈峰, 张涛, 袁志明. 高速铁路列车连带晚点的智能预测及特征识别. 自动化学报, 2019, 45(12): 2251-2259Zhang Qi, Chen Feng, Zhang Tao, Yuan Zhi-Ming. Intelligent prediction and characteristic recognition for joint delay of high speed railway trains. Acta Automatica Sinica, 2019, 45(12): 2251-2259 [19] Podofillini L, Zio E, Vatn J. Risk-informed optimisation of railway tracks inspection and maintenance procedures. Reliability Engineering & System Safety, 2006, 91(1): 20-35 [20] Wang W. A model for maintenance service contract design, negotiation and optimization. European Journal of Operational Research, 2010, 201(1): 239-246 doi: 10.1016/j.ejor.2009.02.018 [21] Wang W. An inspection model based on a three-stage failure process. Reliability Engineering & System Safety, 2011, 96(7): 838-848 [22] Wang W. Maintenance models based on the np control charts with respect to the sampling interval. Journal of the Operational Research Society, 2011, 62(1): 124-133 doi: 10.1057/jors.2009.165 [23] Wang W. An overview of the recent advances in delay-time-based maintenance modelling. Reliability Engineering & System Safety, 2012, 106: 165-178. [24] Andrews J, Prescott D, De Rozières F. A stochastic model for railway track asset management. Reliability Engineering & System Safety, 2014, 130: 76-84. [25] Leighton C L, Dennis C R. Risk assessment of a new high speed railway. Quality & Reliability Engineering International, 2010, 11(6): 445-455 [26] An M, Chen Y, Baker C J. A fuzzy reasoning and fuzzy-analytical hierarchy process based approach to the process of railway risk information: A railway risk management system. Information Sciences, 2011, 181(18): 3946-3966 doi: 10.1016/j.ins.2011.04.051 [27] An M, Qin Y, Jia L M, Chen Y. Aggregation of group fuzzy risk information in the railway risk decision making process. Safety Science, 2016, 82: 18-28 doi: 10.1016/j.ssci.2015.08.011 [28] 魏圆圆, 左忠义, 程伟, 孟子悦. F-ANP法在高速铁路风险评估中的应用. 中国安全科学学报, 2020, 30(S1): 165-171Wei Yuan-Yuan, Zuo Zhong-Yi, Cheng Wei, Meng Zi-Yue. Application of F-ANP method in risk assessment of high-speed railway, China Safety Science Journal, 2020, 30(S1): 165-171 [29] 张友鹏, 李远远. 基于云模型和证据理论的铁路信号系统风险评估. 铁道学报, 2016, 38(1): 75-80 doi: 10.3969/j.issn.1001-8360.2016.01.012Zhang You-Peng, Li Yuan-Yuan. Risk assessment of railway signal system based on cloud model and evidence theory. Journal of China Railway Society, 2016, 38(1): 75-80 doi: 10.3969/j.issn.1001-8360.2016.01.012 [30] Sun S, Zhang C, Yu G. A Bayesian network approach to traffic flow forecasting. IEEE Transactions on intelligent transportation systems, 2006, 7(1): 124-132 doi: 10.1109/TITS.2006.869623 [31] Yang C H, Yang C, Peng T, Yang X Y. A fault-injection strategy for traction drive control systems. IEEE Transactions on Industrial Electronics, 2017, 64(7): 5719-5727 doi: 10.1109/TIE.2017.2674610 [32] Su H, Che Y. Reliability assessment on CTCS-3 train control system using faults trees and Bayesian networks. International Journal of Control and Automation, 2013, 6(4): 271-292 [33] 江磊, 王小敏, 刘一骝, 陈光武. 基于动态贝叶斯网络的CTCS3-300T列控车载系统运行可靠性及可用性评估. 铁道学报, 2020, 42(03): 85-92 doi: 10.3969/j.issn.1001-8360.2020.03.011Jiang Lei, Wang Xiao-Min, Liu Yi-Liu, Chen Guang-Wu. DBN-based operational reliability and availability evaluation of CTCS3-300T onboard system. Journal of The China Railway Society, 2020, 42(03): 85-92 doi: 10.3969/j.issn.1001-8360.2020.03.011 [34] 张喜, 杜旭升, 刘朝英. 车站信号控制设备故障诊断专家系统的研究与实现. 铁道学报, 2009, 31(3): 43-49 doi: 10.3969/j.issn.1001-8360.2009.03.008Zhang Xi, Du Xu-Sheng, Liu Zhao-Ying. Development of railway station signaling control equipment fault diagnosis expert system. Journal of The China Railway Society, 2009, 31(3): 43-49 doi: 10.3969/j.issn.1001-8360.2009.03.008 [35] 赵青鹤. 高铁信号系统的系统级故障诊断方法研究 [硕士学位论文], 北京交通大学, 中国, 2014Zhao Qing-He. Research on System-level Fault Diagnosis of High-speed Railway Signaling System [Master dissertation], Beijing Jiaotong University, China, 2014 [36] 周东华, 纪洪泉, 何潇. 高速列车信息控制系统的故障诊断技术. 自动化学报, 2018, 44(7): 1153-1164Zhou Dong-Hua, Ji Hong-Quan, He Xiao. Fault diagnosis techniques for the information control system of high-speed trains. Acta Automatica Sinica, 2018, 44(7): 1153-1164 [37] 占曙光, 赵军, 彭其渊. 高速铁路区间能力部分失效情况下列车运行实时调整研究. 铁道学报, 2016, 38(10): 1-13 doi: 10.3969/j.issn.1001-8360.2016.10.001Zhan Shu-Guang, Zhao Jun, Peng Qi-Yuan. Real-time train rescheduling on high-speed railway under partial segment blockages. Journal of The China Railway Society, 2016, 38(10): 1-13 doi: 10.3969/j.issn.1001-8360.2016.10.001 [38] 占曙光, 赵军, 彭其渊, 徐培娟, 张馨竹. 高速铁路区间能力全失效条件下列车运行实时调整研究. 铁道学报, 2015, 27(11): 1-9 doi: 10.3969/j.issn.1001-8360.2015.11.001Zhan Shu-Guang, Zhao Jun, Peng Qi-Yuan, Xu Pei-Juan, Zhang Xin-Zhu. Real-time train rescheduling on high-speed railway under complete segment blockages. Journal of The China Railway Society, 2015, 27(11): 1-9 doi: 10.3969/j.issn.1001-8360.2015.11.001 [39] Louwerse I, Huisman D. Adjusting a railway timetable in case of partial or complete blockages. European Journal of Operational Research, 2014, 235(3): 583-593 doi: 10.1016/j.ejor.2013.12.020 [40] 龙思慧, 孟令云, 王义惠, 栾晓洁, 张鹏. 高速列车运行调整与运行控制一体化双目标优化模型与算法. 交通运输系统工程与信息, 2020, 20(06): 163-169Long Si-Hui, Meng Ling-Yun, Wang Yi-Hui, Luan Xiao-Jie, Zang Peng. A bi-objective integrated optimization model of high-speed train rescheduling and train control. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(06): 163-169 [41] Sun Y, Cao C, Wu C. Multi-objective optimization of train routing problem combined with train scheduling on a high-speed railway network. Transportation Research Part C: Emerging Technologies, 2014, 44: 1-20 doi: 10.1016/j.trc.2014.02.023 [42] Dollevoet T, Huisman D, Kroon L G, Veelenturf L P, Wagenaar J C. Application of an iterative framework for real-time railway rescheduling. Computers & Operations Research, 2017, 78: 203-217 -

 下载:
下载:

图(5)
计量
- 文章访问数: 2469
- HTML全文浏览量: 1079
- PDF下载量: 296
- 被引次数: 0
