

Data-knowledge Driven Multiobjective Optimal Control for Municipal Wastewater Treatment Process
-
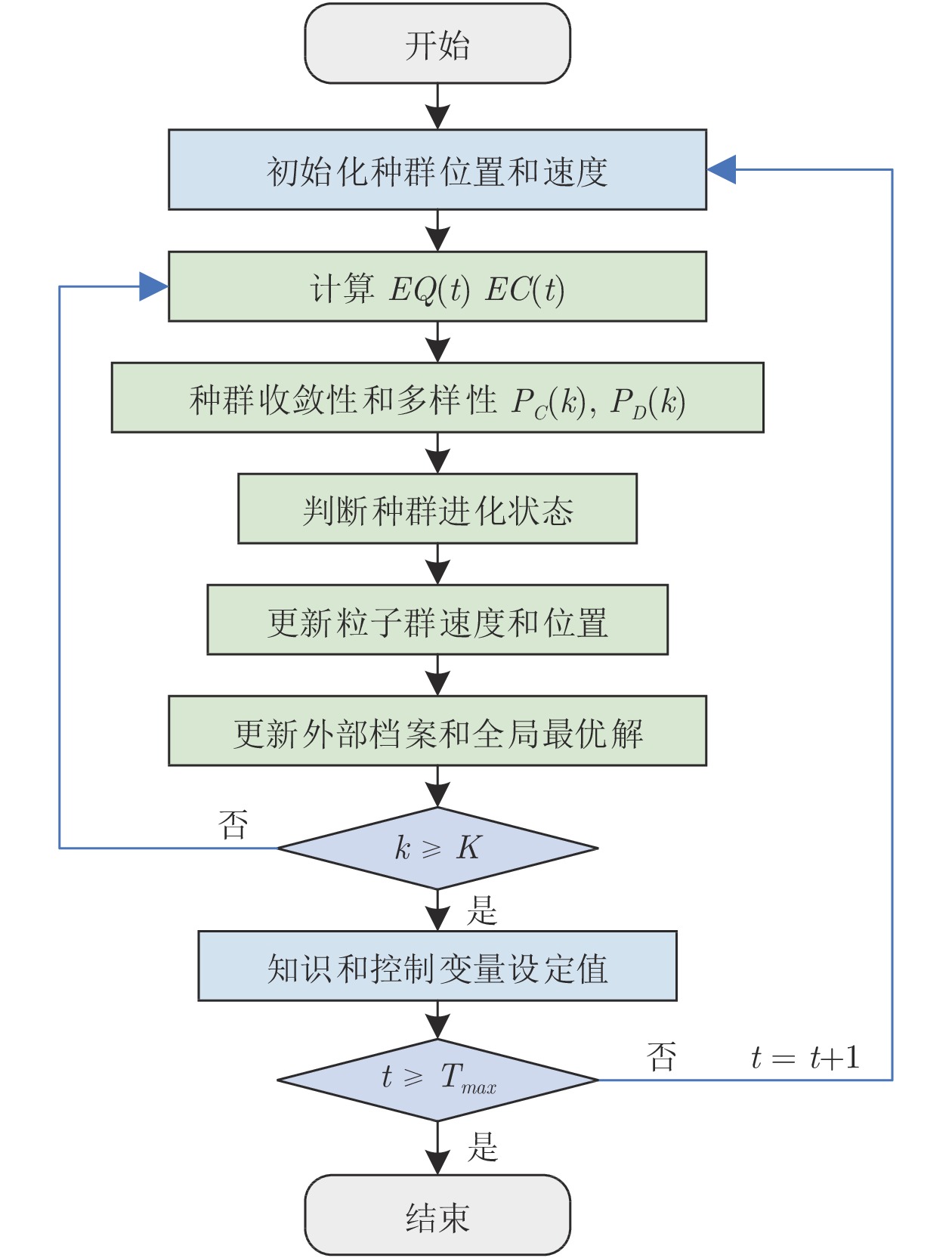
摘要: 城市污水处理过程优化控制是降低能耗的有效手段, 然而, 如何提高出水水质的同时降低能耗依然是当前城市污水处理过程面临的挑战. 围绕上述挑战, 文中提出了一种数据和知识驱动的多目标优化控制(Data-knowledge driven multiobjective optimal control, DK-MOC)方法. 首先, 建立了出水水质、能耗以及系统运行状态的表达关系, 获得了运行过程优化目标模型. 其次, 提出了一种基于知识迁徙学习的动态多目标粒子群优化算法, 实现了控制变量优化设定值的自适应求解. 最后, 将提出的DK-MOC应用于城市污水处理过程基准仿真模型1 (Benchmark simulation model No. 1, BSM1). 结果表明该方法能够实时获取控制变量的优化设定值, 提高了出水水质, 并且有效降低了运行能耗.
-
关键词:
- 城市污水处理过程 /
- 数据和知识驱动方法, 多目标优化控制 /
- 知识迁徙学习 /
- 动态多目标粒子群优化
Abstract: The optimal control is an effective method to reduce energy consumption for municipal wastewater treatment process. However, it is still a challenge to improve the effluent qualities and reduce energy consumption simultaneously for the municipal wastewater treatment process. To solve this problem, a data-knowledge driven multiobjective optimal control (DK-MOC) method is proposed in this paper. First, the expression relationship among effluent qualities, energy consumption and system operation state is established to obtain the operational optimal objective model. Second, a dynamic multiobjective particle swarm optimization algorithm, based on knowledge transfer learning method, is proposed to obtain the optimal set-points of control variables adaptively. Finally, the proposed DK-MOC method is applied to the benchmark simulation model No. 1 (BSM1) of the municipal wastewater treatment process. The results demonstrate that this proposed method can obtain the optimal set-points of control variables online, which not only improve the effluent qualities, but also reduce the operation energy consumption effectively. -
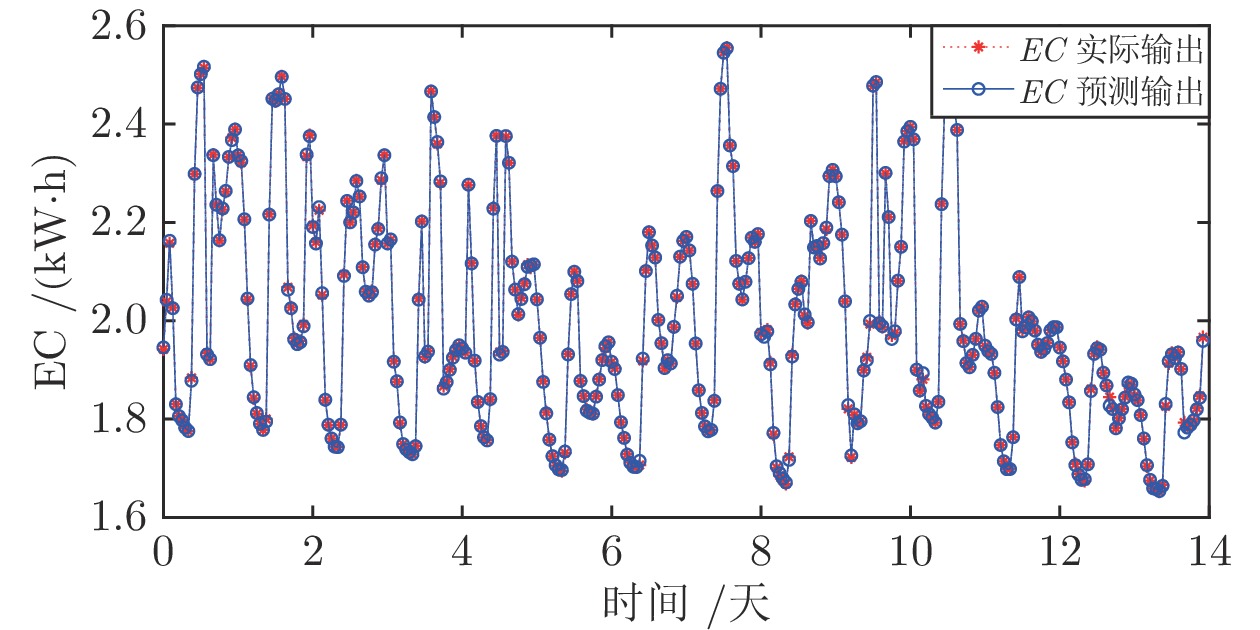
表 1 干旱天气下能耗和出水水质的测量精度
Table 1 The measurement accuracy of energy consumption and effluent quality in dry weather
模型 EC EQ RMSE PA RMSE PA AKF 0.0082 98.71 % 0.0079 97.06 % GA-ANN 0.0123 93.36 % 0.0124 95.52 % LSSVM 0.0115 96.21 % 0.0139 94.31 % AFNN 0.0079 98.99 % 0.0070 98.73 %  下载: 导出CSV
下载: 导出CSV
表 2 阴雨天气下能耗和出水水质的测量精度
Table 2 The measurement accuracy of energy consumption and effluent quality in rainy weather
模型 EC EQ RMSE PA RMSE PA AKF 0.0093 96.60 % 0.0833 97.37 % GA-ANN 0.0146 95.72 % 0.1002 94.32 % LSSVM 0.0138 95.74 % 0.0940 96.76 % AFNN 0.0089 98.88 % 0.0776 98.89 %
下载: 导出CSV
表 3 DK-MOC的出水水质结果
Table 3 Effluent quality results obtained by DK-MOC
水质指标 干旱天气 阴雨天气 排放标准 SNH (mg·L−1) 3.44 3.89 <4 Ntot (mg·L−1) 17.41 17.01 <18 TSS (mg·L−1) 12.57 13.51 <30 COD (mg·L−1) 47.75 46.53 <100 BOD (mg·L−1) 2.71 2.93 <10
下载: 导出CSV
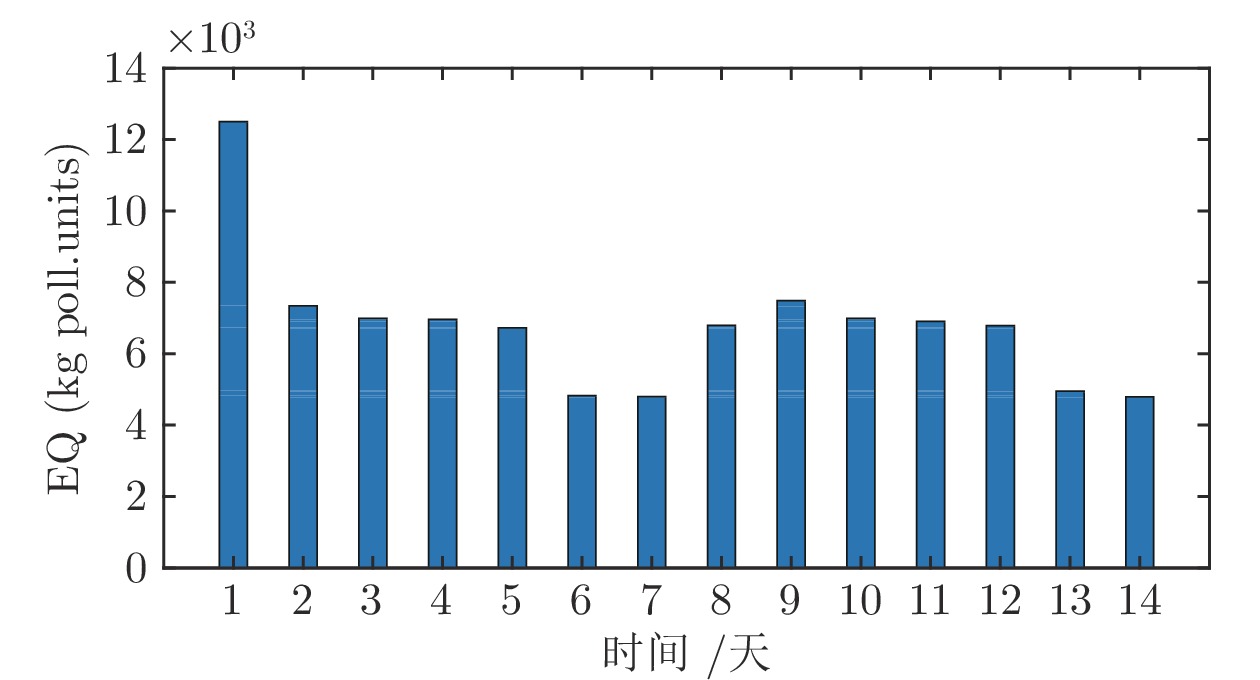
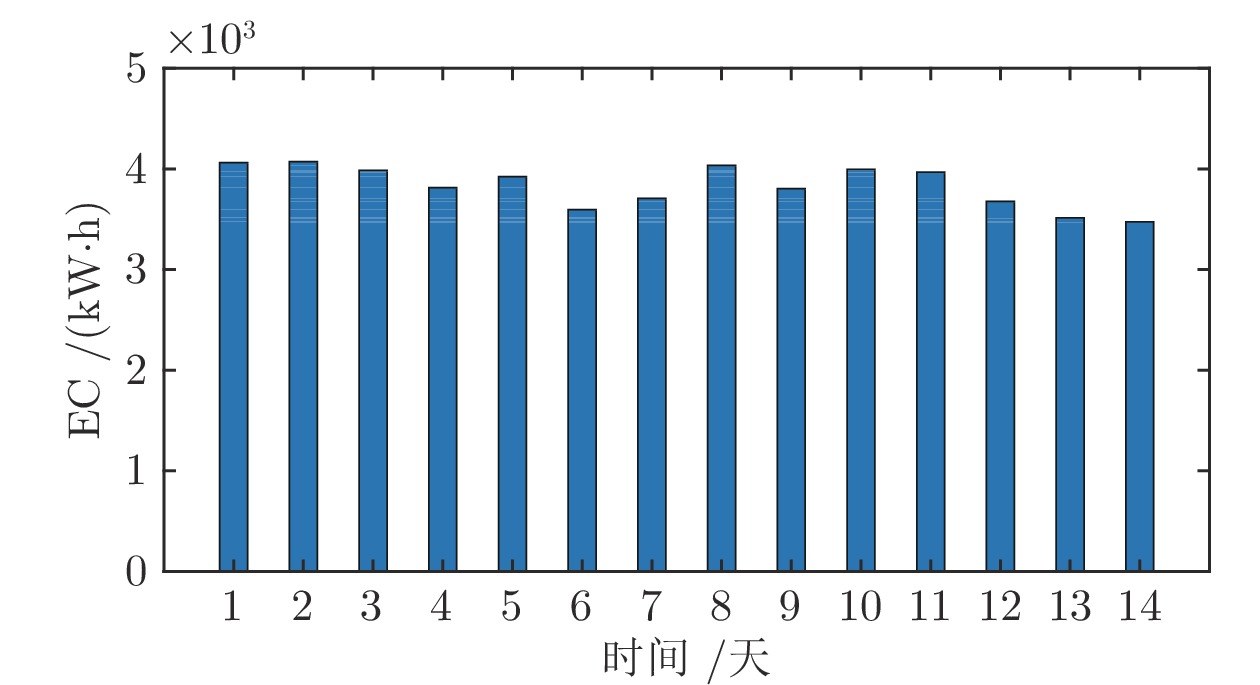
表 4 不同优化控制策略的比较结果
Table 4 Comparison results of different optimal control strategies
优化控制策略 干旱天气 阴雨天气 EC
(kW·h)EQ
(kg poll.
units)EC
(kW·h)EQ
(kg poll.
units)AFNN+NSGAII+PID 4015 8867 4969 9049 AFNN+CMOPSO+PID 4770 8915 4869 9293 AFNN+AMOPSO+PID 3848 7695 3870 7 944 AFNN+KT-DSOPSO+PID 3727 9062 3892 9479 DK-MOC 3 641 7 179 3 821 8106
下载: 导出CSV
-
[1] Tang R, Wang Y, Yuan S, Wang W, Yue Z, Zhan X, et al. Organoarsenic feed additives in biological wastewater treatment processes: Removal, biotransformation, and associated impacts. Journal of Hazardous Materials, 2021, 406: 124789. doi: 10.1016/j.jhazmat.2020.124789 [2] Iratni A, Chang N. Advances in control technologies for wastewater treatment processes: Status, challenges, and perspectives. IEEE/CAA Journal of Automatica Sinica, 2019, 6(2): 337-363. doi: 10.1109/JAS.2019.1911372 [3] 权利敏, 杨翠丽, 乔俊飞. 数据驱动的溶解氧浓度在线自组织控制方法. 自动化学报, DOI: 10.16383/j.aas.c210041Quan Lin-Min, Yang Cui-Li, Qiao Jun-Fei. Data-driven online self-organizing control for dissolved oxygen concentration, Acta Automatica Sinica, DOI: 10.16383/j.aas.c210041 [4] Chistiakova T, Wigren T, Carlsson B. Combined L2 -stable feedback and feedforward aeration control in a wastewater treatment plant. IEEE Transactions on Control Systems Technology, 2020, 28(3): 1017-1024. doi: 10.1109/TCST.2019.2891410 [5] Ben-David E A, Habibi M, Haddad E, Hasanin M, Angel D L, Booth A M, et al. Microplastic distributions in a domestic wastewater treatment plant: Removal efficiency, seasonal variation and influence of sampling technique. Science of The Total Environment, 2021, 752: 141880. doi: 10.1016/j.scitotenv.2020.141880 [6] Borzooei S, Amerlinck Y, Panepinto D, Abolfathi S, Nopens I, Nopens G, et al. Energy optimization of a wastewater treatment plant based on energy audit data: small investment with high return. Environmental Science and Pollution Research, 2020, 27: 17972–17985. doi: 10.1007/s11356-020-08277-3 [7] Sun J Y, Liang P, Yan X X, Zuo K C, Xiao K, Xia J L, et al. Reducing aeration energy consumption in a large-scale membrane bioreactor: Process simulation and engineering application. Water Research, 2016, 93: 205−213. doi: 10.1016/j.watres.2016.02.026 [8] De Gussem K, Fenu A, Wambecq T, Weemaes M. Energy saving on wastewater treatment plants through improved online control: Case study wastewater treatment plant antwerp-south. Water Science &Technology, 2014, 69(5): 1074−1079. [9] Zonta Z J, Kocijan J, Flotats X, Vrečko D. Multi-criteria analyses of wastewater treatment bio-processes under an uncertainty and a multiplicity of steady states. Water Research, 2012, 46(18): 6121-6131. doi: 10.1016/j.watres.2012.08.035 [10] Godini K, Azarian G, Kimiaei A, Dragoi E N, Curteanu S. Modeling of a real industrial wastewater treatment plant based on aerated lagoon using a neuro-evolutive technique. Process Safety and Environmental Protection, 2021, 148: 114-124. doi: 10.1016/j.psep.2020.09.057 [11] Qiu Y, Li J, Huang X, Shi H. A feasible data-driven mining system to optimize wastewater treatment process design and operation. Water, 2018, 10(10): 1342. doi: 10.3390/w10101342 [12] Zeng Y, Zhang Z, Kusiak A, Tang F, Wei X. Optimizing wastewater pumping system with data-driven models and a greedy electromagnetism-like algorithm. Stochastic En- vironmental Research and Risk Assessment, 2016, 30: 1263−1275. doi: 10.1007/s00477-015-1115-4 [13] Filipe J, Bessa R J, Reis M, Alves R, Póvoa P. Data-driven predictive energy optimization in a wastewater pumping station. Applied Energy, 2019, 252: 113423. doi: 10.1016/j.apenergy.2019.113423 [14] Canete J F, Saz-Orozco P, Gabriel J G, Baratti R, Ruano A, Rivas-Blanco I. Control and soft sensing strategies for a wastewater treatment plant using a neuro-genetic approach. Computers & Chemical Engineering, 2021, 144: 107146. [15] Han H G, Zhang L, Liu H X, Qiao J F. Multiobjective design of fuzzy neural network controller for wastewater treatment process. Applied Soft Computing, 2018, 67: 467–478. doi: 10.1016/j.asoc.2018.03.020 [16] 栗三一, 乔俊飞, 李文静, 顾锞. 污水处理决策优化控制. 自动化学报, 2018, 44(12): 2198-2209.Li San-Yi, Qiao Jun-Fei, Li Wen-Jing, Gu Ke. Advanced decision and optimization control for wastewater treatment plants. Acta Automatica Sinica, 2018, 44(12): 2198-2209. [17] Vega P, Revollar S, Francisco M, Martín J M. Integration of set point optimization techniques into nonlinear MPC for improving the operation of WWTPs. Computers and Chemical Engineering, 2014, 68: 78-95. doi: 10.1016/j.compchemeng.2014.03.027 [18] Zhang R, Xie W M, Yu H Q, Li W W. Optimizing municipal wastewater treatment plants using an improved multi-objective optimization method. Bioresource Technology, 2014, 157: 161-165. doi: 10.1016/j.biortech.2014.01.103 [19] Mooselu M G, Nikoo M R, Latifi M, Sadegh M, Al-Wardy M, Al-Rawas G A. A multi-objective optimal allocation of treated wastewater in urban areas using leader-follower game. Journal of Cleaner Production, 2020, 267: 122189. doi: 10.1016/j.jclepro.2020.122189 [20] Tejaswini E S S, Panjwani S, Gara U B B, Ambati S R. Multi-objective optimization based controller design for improved wastewater treatment plant operation. Environmental Technology & Innovation, 2021, 23: 101591 [21] De Faria A B B, Ahmadi A, Tiruta-Barna L, Spérandio M. Feasibility of rigorous multi-objective optimization of wastewater management and treatment plants. Chemical Engineering Research and Design, 2016, 155(Part B): 394-406. [22] Qiao J F, Hou Y, Zhang L, Han H G. Adaptive fuzzy neural network control of wastewater treatment process with multiobjective operation. Neurocomputing, 2018, 275: 383-393. doi: 10.1016/j.neucom.2017.08.059 [23] Huang M, Han W, Wan J, Ma Y, Chen X. Multi-objective optimisation for design and operation of anaerobic digestion using GA-ANN and NSGA-II. Journal of Chemical Technology & Biotechnology, 2016, 91(1): 226-233. [24] 李永明, 史旭东, 熊伟丽. 基于工况识别的污水处理过程多目标优化控制. 化工学报, 2019, 70(11): 4325-4336.Li Yong-Ming, Shi Xu-Dong, Xiong Wei-Li. Condition recognition based intelligent multi-objective optimal control for wastewater treatment. CIESC Journal, 2019, 70(11): 4325-4336. [25] 韩红桂, 张璐, 卢薇, 乔俊飞. 城市污水处理过程动态多目标智能优化控制研究. 自动化学报, 2021, 47(3): 620-629.Han Hong-Gui, Zhang Lu, Lu Wei, Qiao Jun-Fei. Research on dynamic multiobjective intelligent optimal control for municipal wastewater treatment process. Acta Automatica Sinica, 2021, 47(3): 620-629. [26] 杨翠丽, 武战红, 韩红桂, 乔俊飞. 城市污水处理过程优化设定方法研究进展. 自动化学报, 2020, 46(10): 2092-2108.Yang Cui-Li, Wu Zhan-Hong, Han Hong-Gui, Qiao Jun-Fei. Perspectives on optimal setting methods for municipal wastewater treatment processes. Acta Automatica Sinica, 2020, 46(10): 2092-2108. [27] Newhart K B, Holloway R W, Hering A S, Cath T Y. Data-driven performance analyses of wastewater treatment plants: A review. Water research, 2019, 157: 498-513. doi: 10.1016/j.watres.2019.03.030 [28] Han H G. Liu Z, Lu W, Hou Y, Qiao J F. Dynamic MOPSO-based optimal control for wastewater treatment process. IEEE Transactions on Cybernetics, 2021, 51(5): 2518−2528. [29] Christine S, Fu G, Butler D. Multi-objective optimization of wastewater treatment plant control to reduce greenhouse gas emissions. Water Research, 2014, 55: 52-62. doi: 10.1016/j.watres.2014.02.018 [30] Jeppsson U, Pons M N. The COST benchmark simulation model—current state and future perspective. Control Engineering Practice, 2004, 12(3): 299-304. doi: 10.1016/j.conengprac.2003.07.001 -

 下载:
下载:


计量
- 文章访问数: 2807
- HTML全文浏览量: 775
- PDF下载量: 916
- 被引次数: 0
