

-
摘要:
随着5G商用规模部署、下一代互联网IPv6的深化应用, 新一代网络技术的发展引发产业界的关注. 网络的智能化被认为是新一代网络发展的趋势. 网络为数字化社会的信息传输提供了基础, 而网络本身的数字化是智能化发展的先决条件. 面向数字化、智能化的新一代网络发展目标, 本文首次系统化提出了 “数字孪生网络(DTN: Digital twin network)” 的概念, 给出了系统架构设计, 分析了DTN的关键技术. 通过对DTN发展挑战的分析, 本文指出了未来 “数字孪生网络” 的发展方向.
Abstract:With the commercial deployment of 5G and the migration of internet from IPv4 to IPv6, the new development of the network technology has highly attracted the attention of the industry. The intelligentization of network is believed as the trend of the new generation of network development. The network provides the foundation for the information transmission in the digital society, and the digitalization of the network itself is the prerequisite for the intelligent development. Facing the goal of the new generation of digital and intelligent network, this paper introduces the new concept of “digital twin network (DTN)”, designs the system architecture, and analyzes the key technologies of DTN. By investigating the challenges of DTN, this paper points out the future development direction of digital twin network.
-
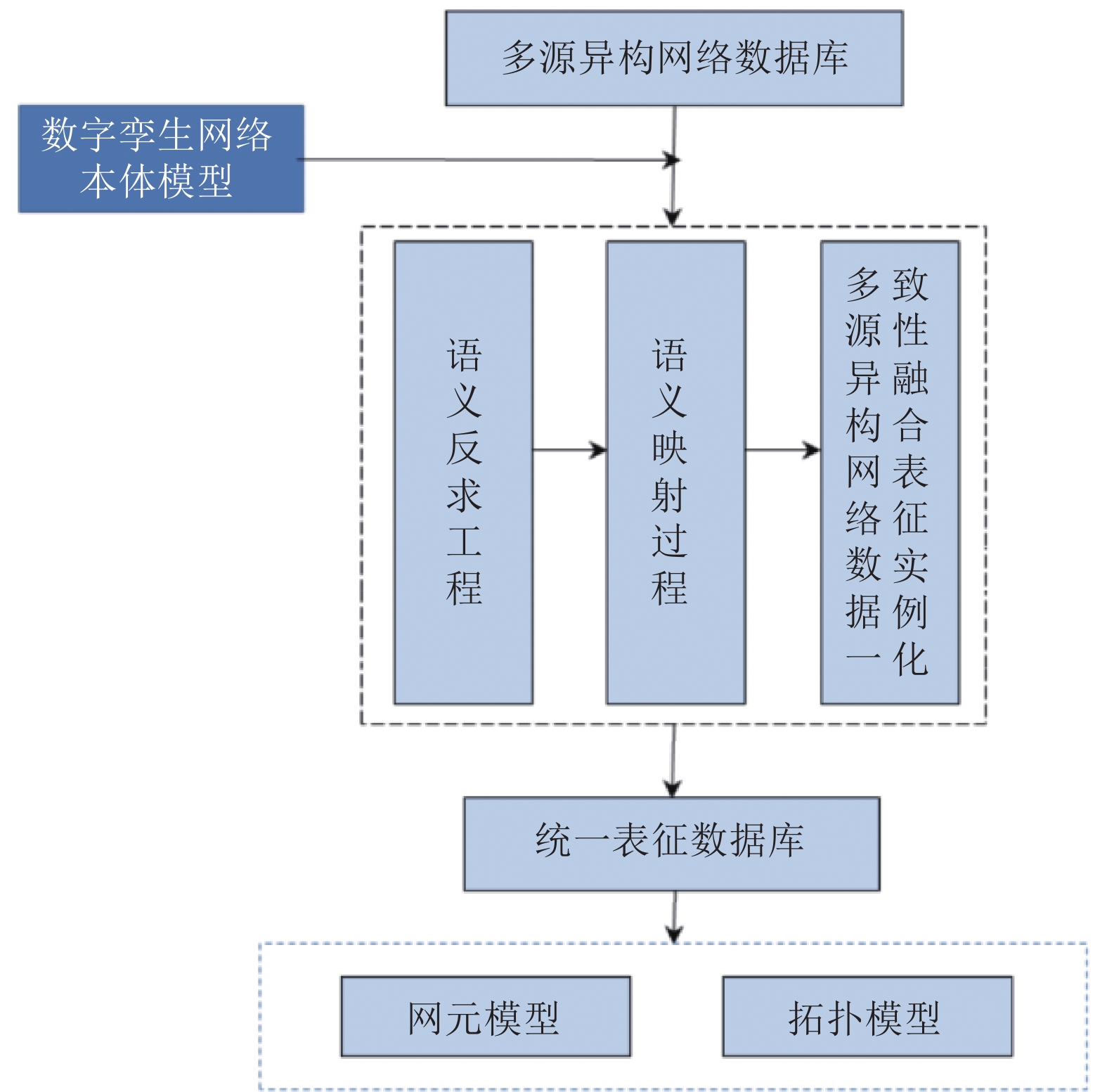
图 6 基于本体的网元和拓扑模型构建流程
Fig. 6 The process of constructing network element and topology model based on ontology
表 1 DTN、SDN和平行网络对比
Table 1 Comparison of DTN, SDN and parallel networks
维度 数字孪生网络 DTN 软件定义网络 SDN 平行网络 物理对象 各种类型的物理网元 具备 SDN 特性的物理网元 各种类型的物理网元 架构层次 物理层、孪生层和网络应用层 物理层、控制层和管理层 物理层、人工网络 + 计算实验层 虚拟网络 物理网络的孪生镜像, 孪生层通过
统一数据建模构建N/A 基于人工系统生成物理网络对应的人工网络;
人工网络基于 SDN 架构构建虚实映射 通过功能映射模型对网络应用进行仿真和迭代
优化; 注重虚实映射的实时性和精确性N/A 通过人工网络逼近物理网络; 更加强调
计算实验和外在行为的干预分析方法 基于孪生层的共享数据仓库, 充分利用大数据
分析、人工智能技术, 通过模型化实例的迭代
仿真, 实现网络的全局动态实时控制和优化只具备基本的网络控制和管
理能力, 缺乏对于复杂网络
的动态控制和优化能力通过对人工网络(以及人工数据)进行各种实
验, 对网络行为进行分析和预测, 进而平
行执行至物理网络并根据反馈迭代优化 下载: 导出CSV
下载: 导出CSV
-
[1] Clemm A, Zhani M F, Boutaba R. Network management 2030: Operations and control of network 2030 services. Journal of Network and Systems Management, 2020, 28(4): 721−750 doi: 10.1007/s10922-020-09517-0 [2] Taleb T, Aguiar R L, Yahia I G B, Christensen G, Chunduri U, Clemm A, et al. White Paper on 6G Networking. (6G Research Visions, No. 6) [Online], available: http://urn.fi/urn:isbn:9789526226842, June 30, 2020 [3] Clemm A, Ciavaglia L, Granville L, Tantsura J. Intent-Based Networking - Concepts and Definitions. Internet-Draft: draft-irtf-nmrg-ibn-concepts-definitions-03, February 22, 2021 [4] CISCO. Intent-based networking [Online], available: https://www.cisco.com/c/en/us/solutions/intent-based-networking.html, March 11, 2021 [5] JUNIPER. The self-driving network [Online], available: https://www.juniper.net/us/en/insights/the-self-driving-network, March 11, 2021 [6] HUAWEI. Autonomous driving network [Online], available: https://carrier.huawei.com/en/spotlight/autonomous-driving-network, March 11, 2021 [7] ETSI. Zero touch network and service management [Online], available: https://www.etsi.org/technologies/zero-touch-network-service-management, March 11, 2021 [8] Grieves M. Digital twin: Manufacturing excellence through virtual factory replication [Online], available: https://www.3ds.com/fileadmin/PRODUCTS-SERVICES/DELMIA/PDF/Whitepaper/DELMIA-APRISO-Digital-Twin-Whitepaper.pdf, March 11, 2021 [9] Glaessgen E H, Stargel D S. The digital twin paradigm for future NASA and U.S. air force vehicles. In: Proceedings of the 53rd Structures, Structural Dynamics, and Materials Conference: Special Session on the Digital Twin. Honolulu, Hawaii, USA: AIAA, 2012. 1−14 [10] Tao F, Zhang H, Liu A, Nee A Y C. Digital twin in industry: State-of-the-art. IEEE Transactions on Industrial Informatics, 2019, 15(4): 2405−2415 doi: 10.1109/TII.2018.2873186 [11] Tao F, Cheng J F, Qi Q L, Zhang M, Zhang H, Sui F Y. Digital twin-driven product design, manufacturing and service with big data. International Journal of Advanced Manufacturing Technology, 2018, 94(9): 3563−3576 [12] 刘蔚然, 陶飞, 程江峰, 张连超, 易旺民. 数字孪生卫星: 概念、关键技术及应用. 计算机集成制造系统, 2020, 26(3): 565−588Liu Wei-Ran, Tao Fei, Cheng Jiang-Feng, Zhang Lian-Chao, Yi Wang-Min. Digital twin satellite: Concept, key technologies and applications. Computer Integrated Manufacturing Systems, 2020, 26(3): 565−588 [13] ITU-T. Representative use cases and key network requirements for Network 2030, FG Network 2030 Technical Report, 2020. [14] ITU-T. Additional representative use cases and key network requirements for Network 2030. FG Network 2030 Technical Report, 2020. [15] Natis Y, Jacobson S, Reynolds M, Velosa A, Lheureux B, Halpern M, et al. Innovation insight for digital twins - driving better IoT-fueled decisions [Online], available: https://www.gartner.com/en/documents/3645341, March 22, 2017 [16] ISO. Digital Twin framework for manufacturing - Part 1: Overview and general principles: ISO/CD 23247-1 [Online], available: https://www.iso.org/standard/75066.html, March 11, 2021 [17] ISO. Digital Twin framework for manufacturing - Part 2: Reference architecture: ISO/CD 23247-2 [Online], available: https://www.iso.org/standard/78743.html, March 11, 2021 [18] 王飞跃. 平行系统方法与复杂系统的管理和控制. 控制与决策, 2004, 19(5): 485−489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5): 485−489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002 [19] 张俊, 许沛东, 王飞跃. 平行系统和数字孪生的一种数据驱动形式表示及计算框架. 自动化学报, 2020, 46(7): 1346−1356Zhang Jun, Xu Pei-Dong, Wang Fei-Yue. Parallel systems and digital twins: A data-driven mathematical representation and computational framework. Acta Automatica Sinica, 2020, 46(7): 1346−1356 [20] 杨林瑶, 陈思远, 王晓, 张俊, 王成红. 数字孪生与平行系统: 发展现状、对比及展望. 自动化学报, 2019, 45(11): 2001−2031Yang Lin-Yao, Chen Si-Yuan, Wang Xiao, Zhang Jun, Wang Cheng-Hong. Digital twins and parallel systems: state of the art, comparisons and prospect. Acta Automatica Sinica, 2019, 45(11): 2001−2031 [21] Negri E, Fumagalli L, Macchi M. A review of the roles of digital twin in CPS-based production systems. Procedia Manufacturing, 2017, 11: 939−948 doi: 10.1016/j.promfg.2017.07.198 [22] Wang F Y. The emergence of intelligent enterprises: From CPS to CPSS. IEEE Intelligent Systems, 2010, 25(4): 85−88 doi: 10.1109/MIS.2010.104 [23] 王飞跃, 张梅, 孟祥冰, 王雁, 马娇楠, 刘武, 等. 平行眼: 基于ACP的智能眼科诊疗. 模式识别与人工智能, 2018, 31(6): 495−504Wang Fei-Yue, Zhang Mei, Meng Xiang-Bing, Wang Yan, Ma Jiao-Nan, Liu Wu, et al. Parallel eyes: An ACP-based smart ophthalmic diagnosis and treatment. Pattern Recognition and Artificial Intelligence, 2018, 31(6): 495−504 [24] 王飞跃, 张梅, 孟祥冰, 王蓉, 王晓, 张志成, 等. 平行手术: 基于ACP的智能手术计算方法. 模式识别与人工智能, 2017, 30(11): 961−970Wang Fei-Yue, Zhang Mei, Meng Xiang-Bing, Wang Rong, Wang Xiao, Zhang Zhi-Cheng, et al. Parallel surgery: An ACP-based approach for intelligent operations. Pattern Recognition and Artificial Intelligence, 2017, 30(11): 961−970 [25] Wang F Y, Zheng N N, Cao D P, Martinez C M, Li L, Liu T. Parallel driving in CPSS: A unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 577−587 doi: 10.1109/JAS.2017.7510598 [26] 王飞跃. 面向赛博空间的战争组织与行动: 关于平行军事体系的讨论. 军事运筹与系统工程, 2012, 26(3): 5−10 doi: 10.3969/j.issn.1672-8211.2012.03.002 [27] Yang L and Wang F. Driving into Intelligent Spaces with Pervasive Communications. IEEE Intelligent Systems, 2007, 22(1): 12−15. [28] Hu K. Bridging networks and business intent to activate intelligence [Online], available: https://www.huawei.com/en/about-huawei/publications/communicate/86/bridging-networks-business-intent, Dec. 28, 2018 [29] ARIA Networks. Tier 1 Operator Goes Live with Automated Traffic Engineering using AI and a ‘Digital Twin’ [Online], available: https://www.aria-networks.com/blog/tier-1-operator-goes-live-with-automated-traffic-engineering-using-ai-and-a-digital-twin/, March 11, 2021 [30] Yu Q , Ren J , Fu Y J, Li Y. Cybertwin: An origin of next generation network architecture. IEEE Wireless Communications, 2019, 26(6): 111−117. [31] Yu Q , Ren J , Zhou H B, Zhang W. A Cybertwin based network architecture for 6G. In: Proceedings of the 2nd 6G Wireless Summit (6G SUMMIT), Levi, Finland: IEEE, Virtual Meeting: IEEE, 2020. [32] Dong R, She C Y, Hardjawana W, Li Y H, Vucetic B. Deep learning for hybrid 5G services in mobile edge computing systems: Learn from a digital twin. IEEE Transactions on Wireless Communications, 2019, 18(10): 4692−4707 doi: 10.1109/TWC.2019.2927312 [33] Dai Y Y, Zhang K, Maharjan S, Zhang Y. Deep reinforcement learning for stochastic computation offloading in digital twin networks. IEEE Transactions on Industrial Informatics, DOI: 10.1109/TII.2020.3016320, to be published [34] Sun W, Zhang H B, Wang R, Zhang Y. Reducing offloading latency for digital twin edge networks in 6G. IEEE Transactions on Vehicular Technology, 2020, 69(10): 12240−12251 doi: 10.1109/TVT.2020.3018817 [35] 王飞跃, 杨坚, 韩双双, 杨柳青, 程翔. 基于平行系统理论的平行网络架构. 指挥与控制学报, 2016, 2(1): 71−77Wang Fei-Yue, Yang Jian, Han Shuang-Shuang, Yang Liu-Qing, Cheng Xiang. The framework of parallel network based on the parallel system theory. Journal of Command and Control, 2016, 2(1): 71−77 [36] 王飞跃, 杨柳青, 胡晓娅, 等. 平行网络与网络软件化: 一种新颖的网络架构. 中国科学: 信息科学, 2017, 47: 811−831 doi: 10.1360/N112016-00047Wang Fei-Yue, Yang Liu-Qing, Hu Xiao-Ya, et al. Parallel networks and network softwarization: A novel network architecture. Scientia Sinica Informationis, 2017, 47: 811−831 doi: 10.1360/N112016-00047 [37] Wang F Y, Yang L Q, Cheng X, Han S S, Yang J. Network softwarization and parallel networks: Beyond software-defined networks. IEEE Network, 2016, 30(4): 60−65 doi: 10.1109/MNET.2016.7513865 [38] McKeown N, Anderson T, Balakrishnan H, Parulkar G, Peterson L, Rexford J, et al. OpenFlow: Enabling innovation in campus networks. ACM SIGCOMM Computer Communication Review, 2008, 38(2): 69−74 doi: 10.1145/1355734.1355746 [39] Open Networking Foundation. Software-defined networking: The new norm for networks. ONF White Paper, 2012, 2: 2−6 [40] Song H, Qin F, Martinez-Julia P, Ciavaglia L, Wang A. Network Telemetry Framework. Internet-Draft: Internet-Draft draft-ietf-opsawg-ntf-07, February 19, 2021 [41] Quittek J, Zseby T, Claise B, Zander S. Requirements for IP flow information export (IPFIX). IETF RFC 3917, 2004. [42] Song H Y, Zhou T R, Li Z B, Shin J, Lee K. Postcard-based on-Path flow data telemetry. Internet-Draft: draft-song-ippm-postcard-based-telemetry-09, February 19, 2021 [43] Kim C, Sivaraman A, Katta N, Bas A, Dixit A, Wobker L J. In-band network telemetry via programmable dataplanes. In: Proceedings of the 2015 ACM Conference on SIGCOMM. Demo Session, London: ACM, 2015 [44] Brockners F, Bhandari S, Dara S, Pignataro G, Gredler H, Leddy J, et al. Requirements for in-situ OAM. Internet-Draft: draft-brockners-inband-oam-requirements-03, March 13, 2017 [45] Lu B, Xu L, Song Y Z, Dai L F, Liu M, Zhou T R, et al. iFIT: Intelligent flow information telemetry. In: Proceedings of the 2019 ACM SIGCOMM Conference Posters and Demos. Beijing, China: ACM, 2019. 15−17 [46] Inmon W H. 数据仓库. 北京: 机械工业出版社, 2006.Inmon W H. Building the Data Warehouse. Beijing: China Machine Press, 2006. [47] Studer R, Benjamins V R, Fensel D. Knowledge engineering: Principles and methods. Data & Knowledge Engineering, 1998, 25(1-2): 161−197 [48] 卜令娟. 基于本体的战场态势一致性关键技术研究[硕士学位论文], 杭州电子科技大学, 中国, 2015.Bu Ling-Juan. Research on key technologies in ontology-based battlefield situation consistency [Master thesis], Hangzhou Dianzi University, China, 2015. [49] Breiman L. Random forests. Machine Learning, 2001, 45: 5−32 doi: 10.1023/A:1010933404324 [50] Hu J F, Min J L. Automated detection of driver fatigue based on EEG signals using gradient boosting decision tree model. Cognitive Neurodynamics, 2018, 12(4): 431−440 doi: 10.1007/s11571-018-9485-1 [51] Chang L, Zhu M L, Gu T L, Bin C Z, Qian J Y, Zhang J. Knowledge graph embedding by dynamic translation. IEEE Access, 2017, 5: 20898−20907 doi: 10.1109/ACCESS.2017.2759139 [52] Srinivas M, Patnaik L M. Genetic algorithms: A survey. Computer, 1994, 27(6): 17−26 doi: 10.1109/2.294849 [53] Price K V. Differential evolution. Handbook of Optimization. Berlin: Springer, 2013. 187−214 [54] Timmis J, Neal M, Hunt J. An artificial immune system for data analysis. Biosystems, 2000, 55(1-3): 143−150 doi: 10.1016/S0303-2647(99)00092-1 [55] Dorigo M, Maniezzo V, Colorni A. Ant system: Optimization by a colony of cooperating agents. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 1996, 26(1): 29−41 doi: 10.1109/3477.484436 [56] Kennedy J, Eberhart R. Particle swarm optimization. In: Proceedings of ICNN'95-International Conference on Neural Networks. Perth, WA, Australia: IEEE, 2002. 1942−1948 [57] Stutton R S, Barto A G. Reinforcement learning. A Bradford Book. Cambridge, MA: MIT Press, 1998. [58] Cao X D, Wipf D, Wen F, Duan G Q, Sun J. A practical transfer learning algorithm for face verification. In: Proceedings of the 2013 IEEE International Conference on Computer Vision. Sydney, NSW, Australia: IEEE, 2013. 3208−3215 [59] Ware C, Purchase H, Colpoys L, McGill M. Cognitive measurements of graph aesthetics. Information Visualization, 2002, 1(2): 103−110 doi: 10.1057/palgrave.ivs.9500013 [60] 王松, 张野, 吴亚东. 网络拓扑结构可视化方法研究与发展. 网络与信息安全学报, 2018, 4(2): 1−17Wang Song, Zhang Ye, Wu Ya-Dong. Survey on network topology visualization. Chinese Journal of Network and Information Security, 2018, 4(2): 1−17 [61] Wu C Y, Sheng S Y, Dong X J. Research on visualization systems for DDoS attack detection. In: Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Miyazaki, Japan: Miyazaki, 2018. 2986−2991 [62] Zhang T Y, Wang X M, Li Z Z, Guo F Z, Ma Y X, Chen W. A survey of network anomaly visualization. Science China Information Sciences, 2017, 60(12): 121101 doi: 10.1007/s11432-016-0428-2 [63] Mansmann F, Keim D A, North S C, Rexroad B, Sheleheda D. Visual analysis of network traffic for resource planning, interactive monitoring, and interpretation of security threats. IEEE Transactions on Visualization and Computer Graphics, 2007, 13(6): 1105−1112 doi: 10.1109/TVCG.2007.70522 [64] Richardson. L, Amundsen M. RESTful Web APIs. O'Reilly Media, Inc, 2013. [65] Woodall T S, Shipman G M, Bosilca G, Graham R L, Maccabe A B. High performance RDMA protocols in HPC. In: Recent Advances in Parallel Virtual Machine and Message Passing Interface. Berlin, Heidelberg: Springer-Verlag, 2006. 76−85 [66] Iyengar J, Thomson M. QUIC: A UDP-Based Multiplexed and Secure Transport. Internet-Draft: draft-ietf-quic-transport-34, January 14, 2021 [67] Bishop M. Hypertext Transfer Protocol Version 3 (HTTP/3). Internet-Draft: draft-ietf-quic-http-34, February 2, 2021 -

 下载:
下载:


计量
- 文章访问数: 9997
- HTML全文浏览量: 5921
- PDF下载量: 2556
- 被引次数: 0
