

Research on Current Sharing/Voltage Recovery Based Adaptive Dynamic Programming Control Strategy of Microgrids
-
摘要: 含多类型分布式电源的微电网已经成为了未来电力系统的重要发展方向, 其中风能和光能在降低化石能源消耗和二氧化碳排放等方面有着极大优势, 考虑二者之间强互补性的协同调度已被广泛研究. 但风/光协同调度的微电网多关注分钟级的调度或优化问题而非风/光波动下秒级的实时电流按容量比例精准分担, 简称电流均衡, 而精准电流均衡有助于可再生能源的高比例消纳. 因此, 本文提出了基于自适应动态规划的微电网电流均衡和电压恢复控制策略. 首先, 构建包含风电整流型电能变换器和光电升压型电能变换器的广义风光拓扑同胚升压变换器模型, 其提供了后续控制器设计的模型基础. 其次, 本文将电流均衡和电压恢复问题转化为最优控制问题, 基于此, 每个能源主体的目标函数转化为获取最优控制变量和最小电压/电流控制偏差, 进而转化为求解哈密顿−雅克比−贝尔曼(Hamilton-Jacobi-Bellman, HJB)方程问题. 基于此, 提出了基于贝尔曼准则的分布式自适应动态规划控制策略以求取HJB方程的数值解, 最终实现电流均衡和电压恢复. 最后仿真结果验证了所提分布式自适应动态规划控制策略的有效性.Abstract: Microgrids consisting of different distributed generators (DGs) have become one popular direction for future power systems. Therein, wind energy and solar energy have been regarded as the most promising contributors to reduce fuel consumption and CO2 emission. Although wind energy and solar energy have been widely studied due to their strong complementarity, the microgrid with wind energy and solar energy coordination schedule system pays more attention on the minute level scheduling, rather than the second level current sharing under wind/solar disturbance. Therein, the accurate current sharing is useful for high proportion of renewable energy. To this end, the accurate real-time current sharing based on their capacity ratio for the microgrid is not achieved. Therefore, this paper proposes an accurate current sharing and voltage recovery control strategy based on adaptive dynamic programming approach in microgrids. Firstly, the generalized wind/solar topological homeomorphism boost converter model with the AC rectifier interface converter of the wind energy and DC boost interface converter of the solar energy is proposed to provide the model basis for subsequent controller design. Secondly, the accurate current sharing and voltage recovery problem is transformed into an optimal control problem. To this end the objective function of each source agent is switched to obtain the optimal controller and minimize the voltage/current control deviation, which is further switched to solve the Hamilton-Jacobi-Bellman (HJB) function. To this end, an adaptive dynamic programming control strategy based on the Bellman principle is proposed to solve the HJB function. The accurate current sharing and voltage recovery can be achieved. Finally, simulation results verify the effectiveness of the proposed distributed adaptive dynamic programming control strategy.1) 收稿日期 2021-01-05 录用日期 2021-04-16 Manuscript received January 5, 2021; accepted April 16, 2021 国家自然科学基金 (U20A20190, 62073065), 国家重点研发计划 (2018YFA0702200) 资助 Supported by National Natural Science Foundation of China (U20A20190, 62073065), and National Key Research and Develo-2) pment Program of China (2018YFA0702200) 本文责任编委 张俊 Recommended by Associate Editor ZHANG Jun 1. 东北大学信息科学与工程学院 沈阳 110819 1. College of Information Science and Engineering, Northeastern University, Shenyang 110819
-
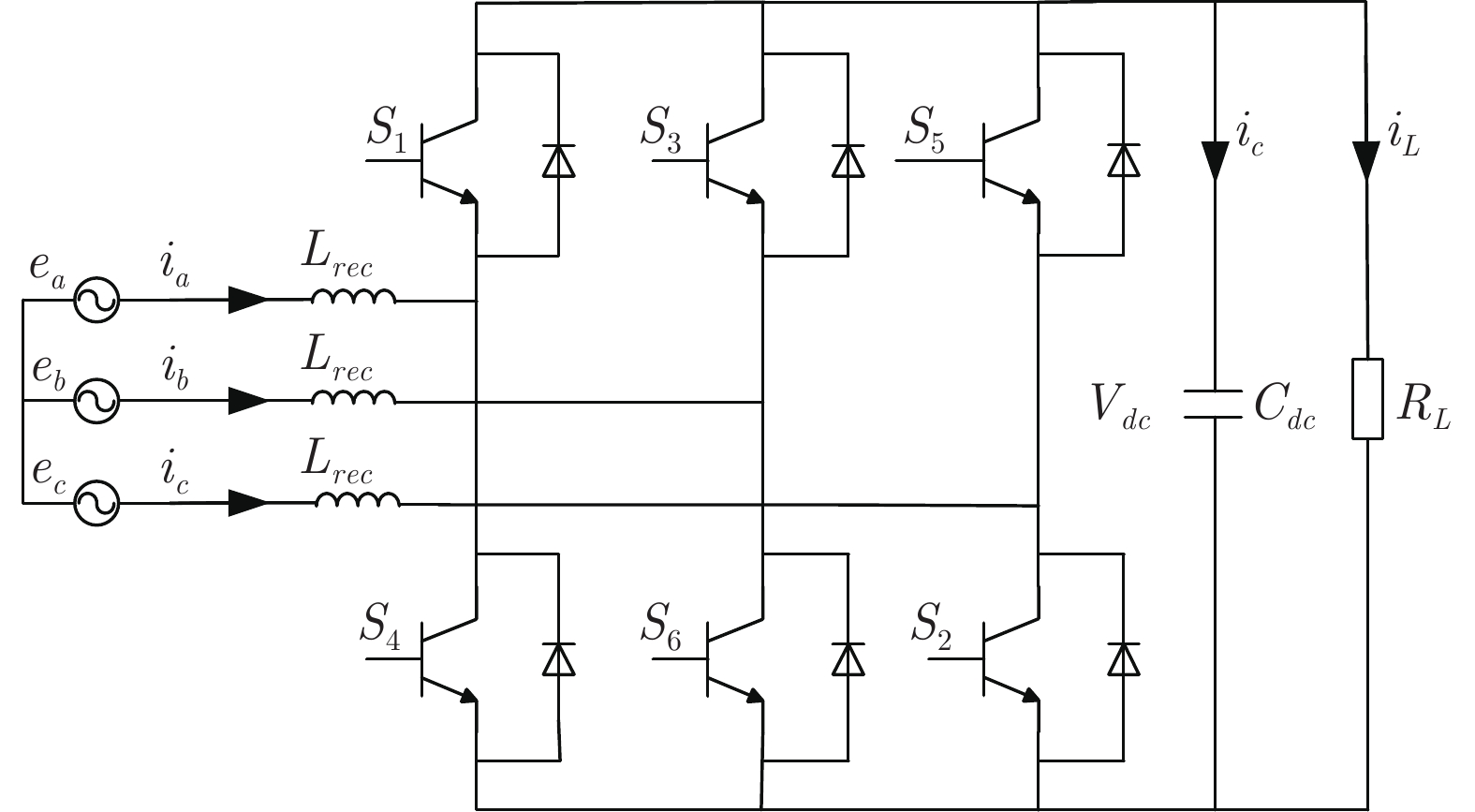
图 2 风力发电装置和直流母线间的电能变换器
Fig. 2 The interface converter between wind energy generator and DC bus
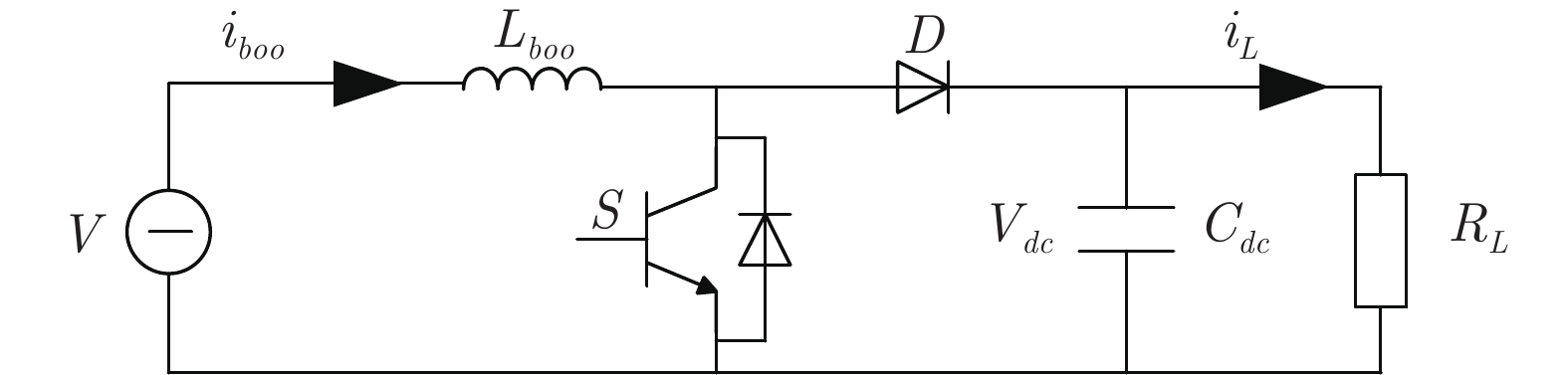
图 3 光伏发电装置和直流母线间的电能变换器
Fig. 3 The interface converter between solar energy generator and DC bus
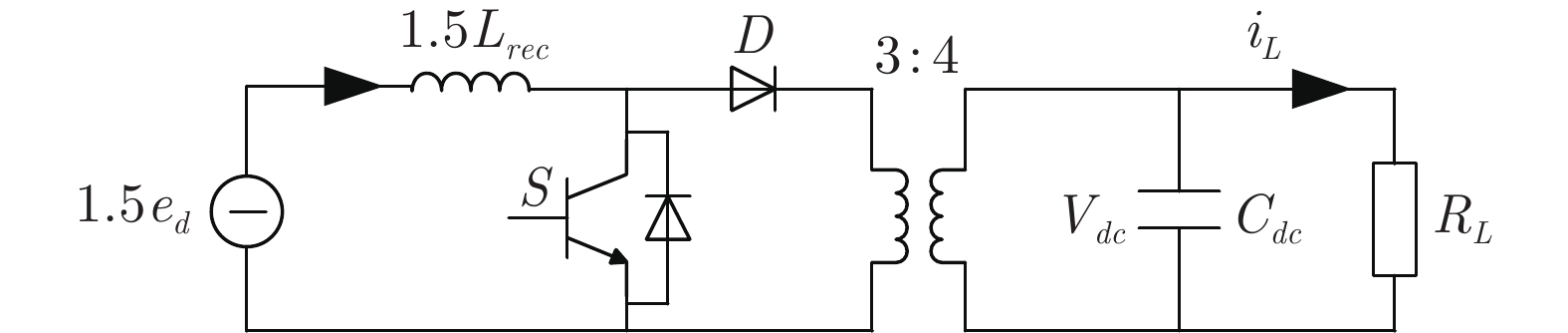
图 4 风力发电装置与直流母线的等效电能变换器
Fig. 4 The equivalent interface converter between wind energy generator and DC bus
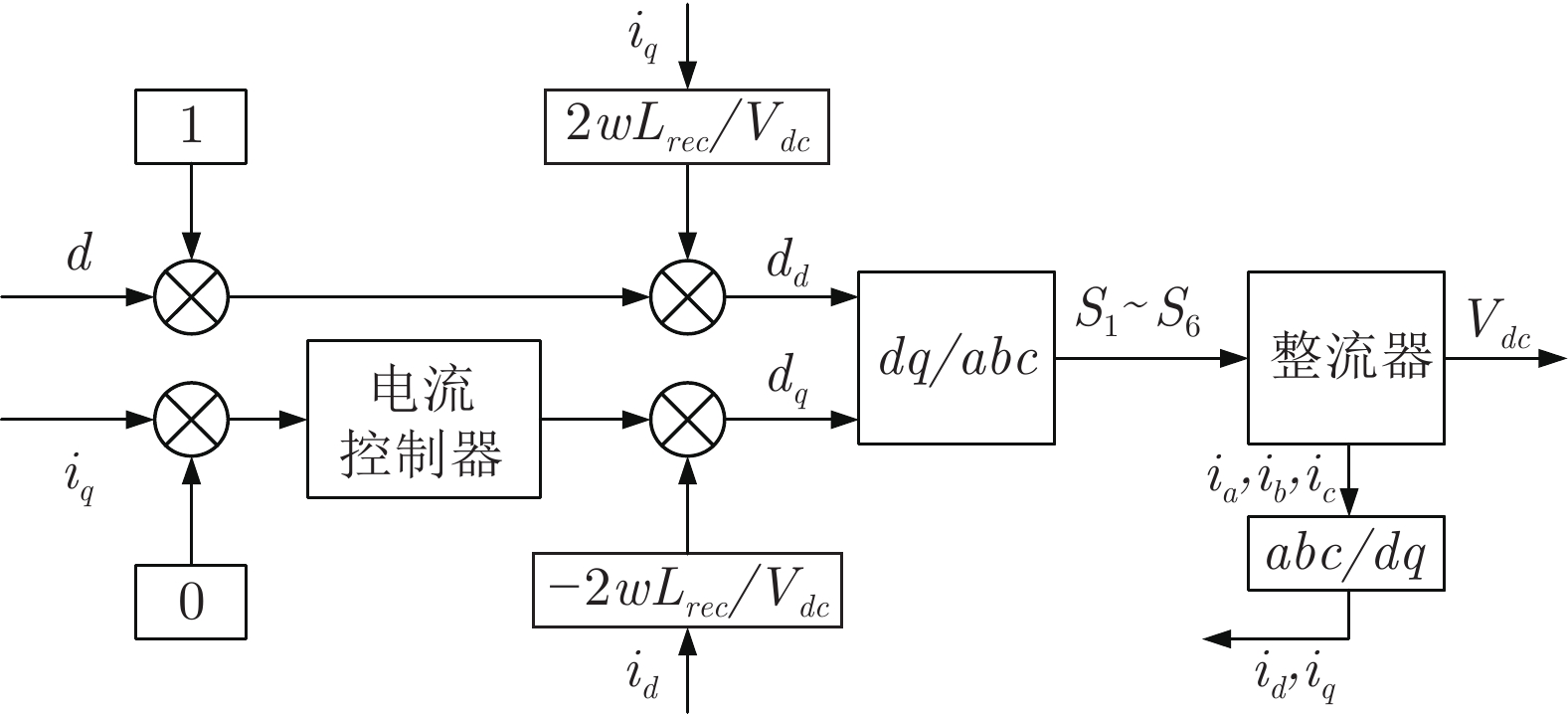
图 5 风力发电装置等效拓扑同胚电能变换器控制框图
Fig. 5 Control block diagram for realizing the equivalent topological homeomorphism system of the wind energy interface converter
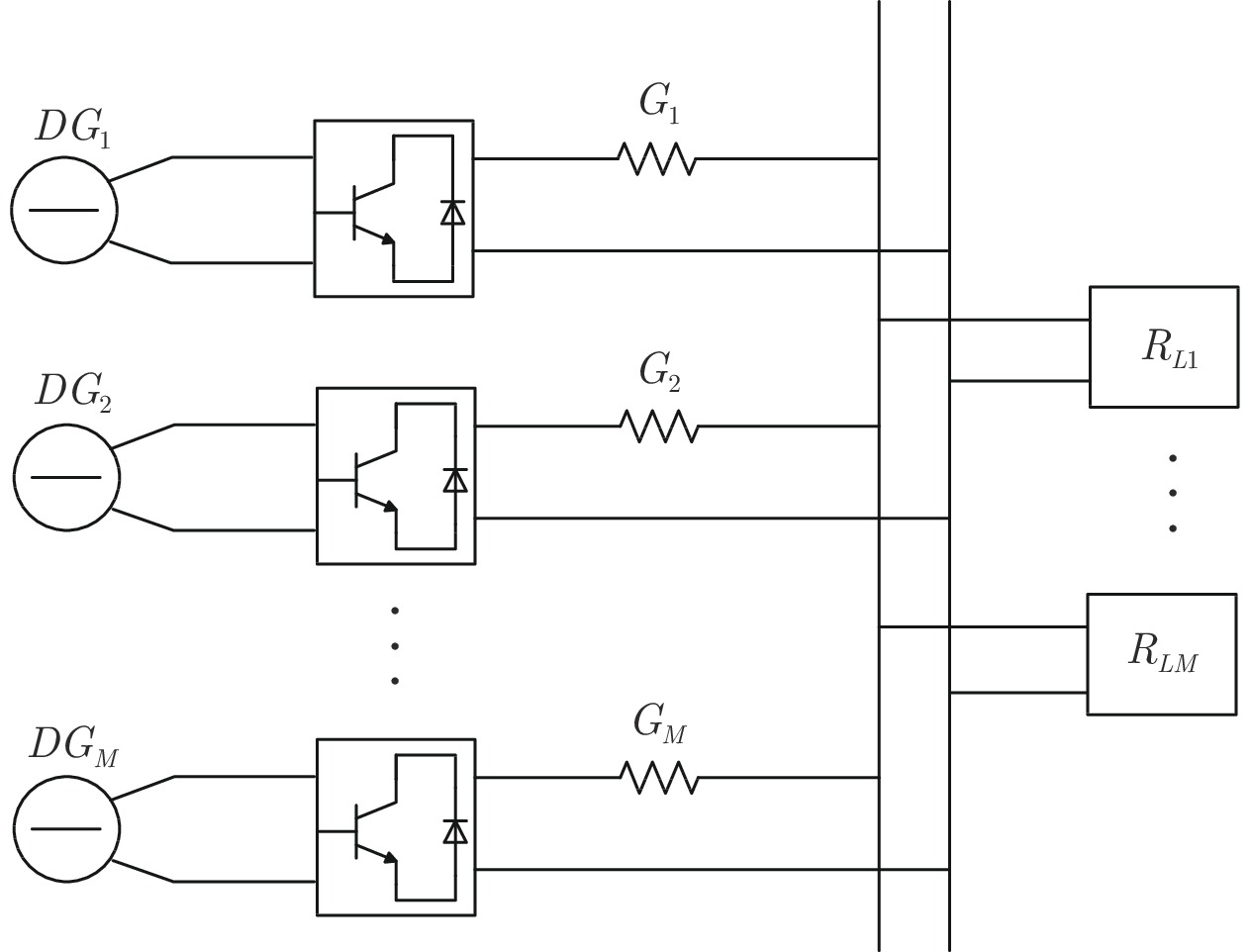
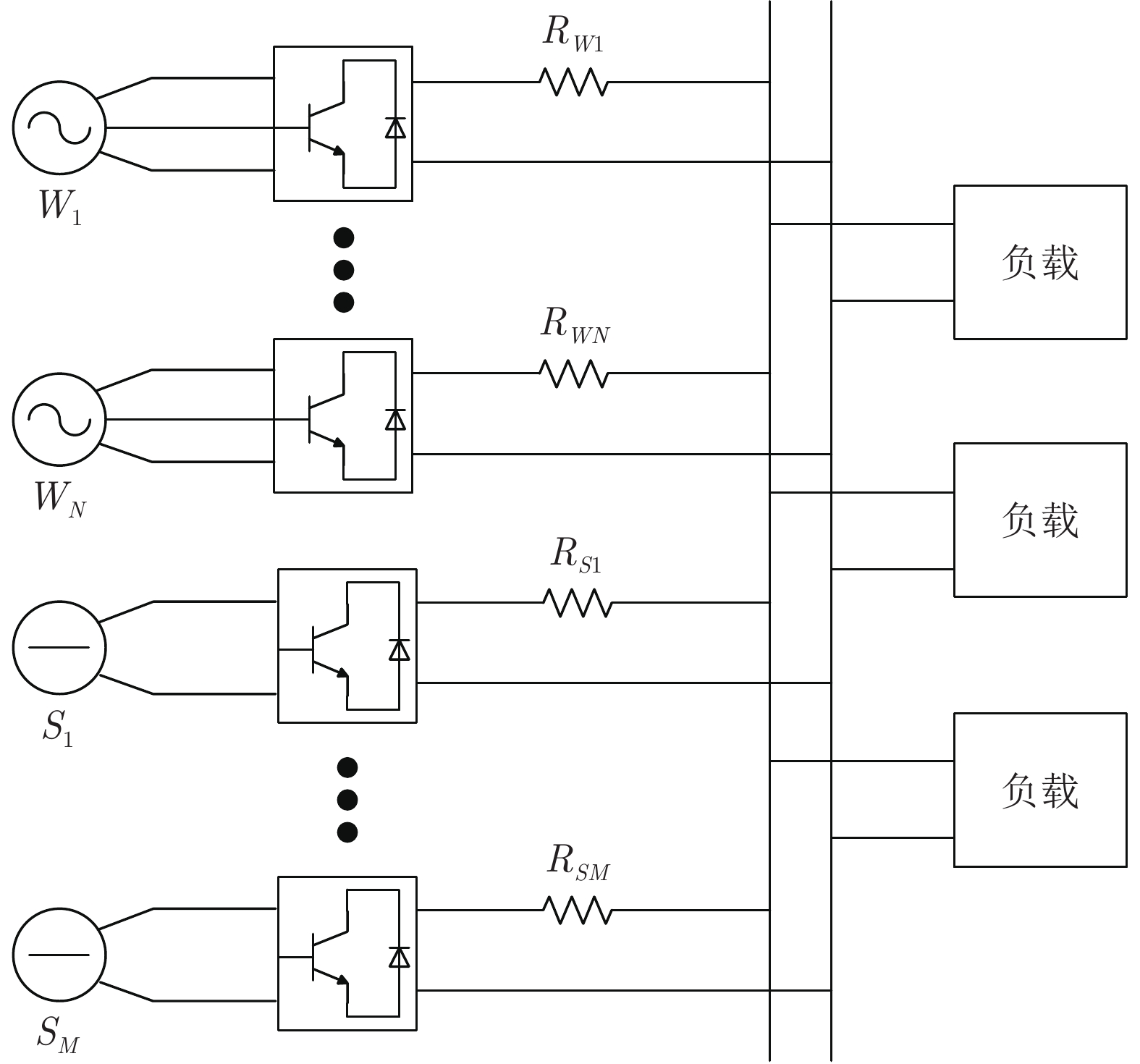
图 6 基于广义升压变换器的微电网系统
Fig. 6 The typical circuit of the microgrid system based on generalized boost converter
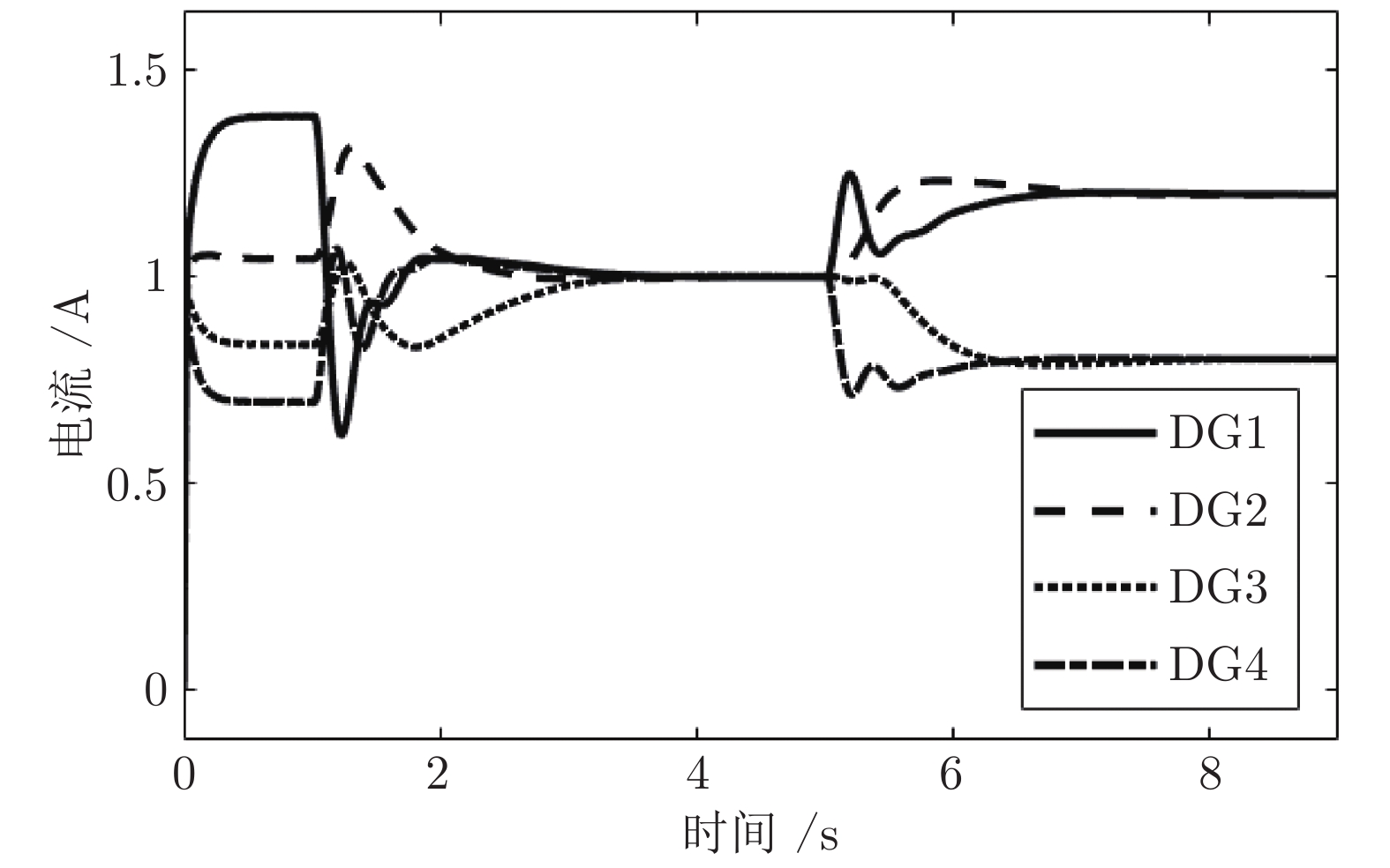
图 8 微电网系统实时电流
Fig. 8 Real-time current of distributed generators in the microgrid system
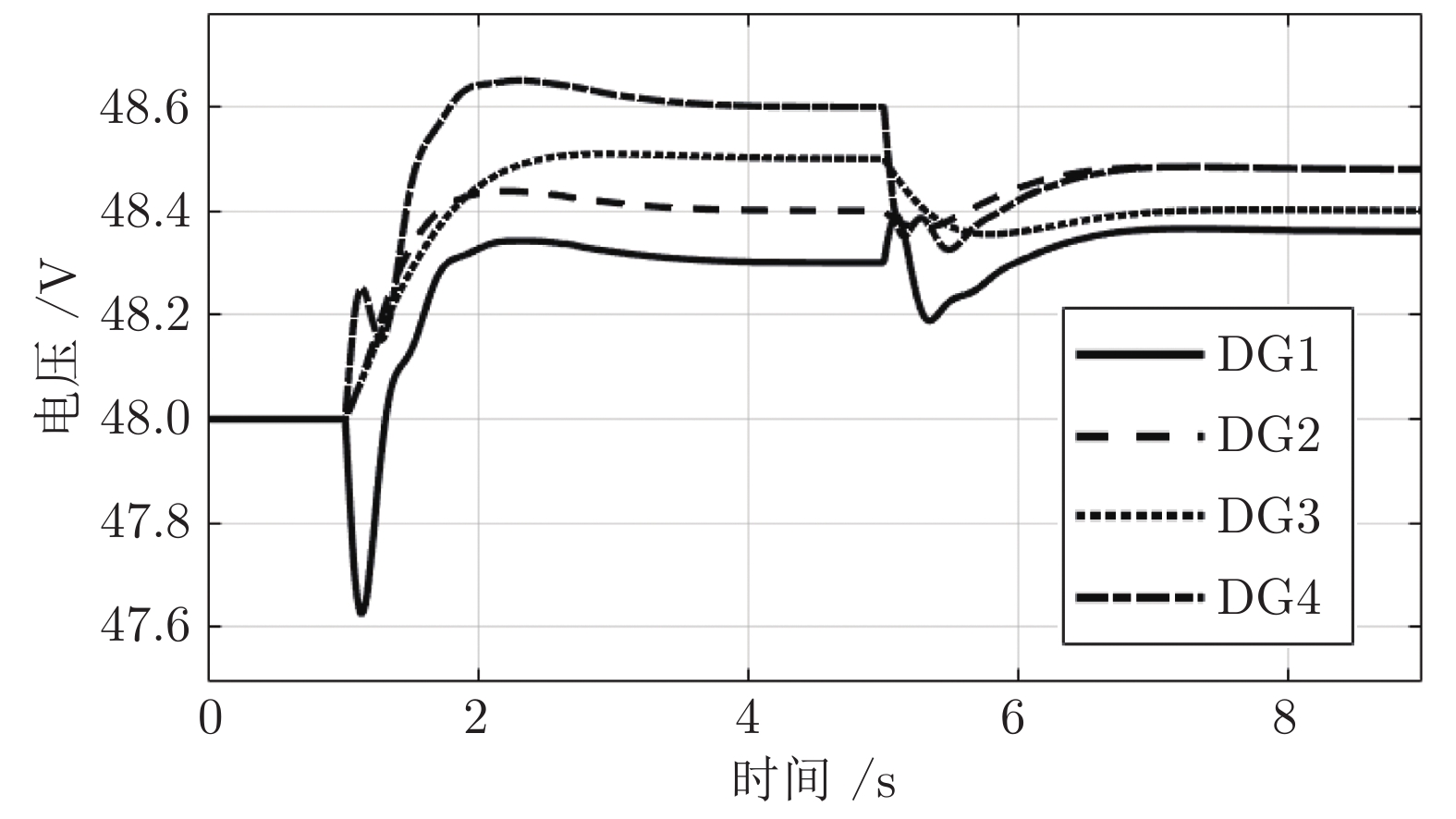
图 9 微电网系统分布式电源实时电压
Fig. 9 Real-time voltage of distributed generators in the microgrid system
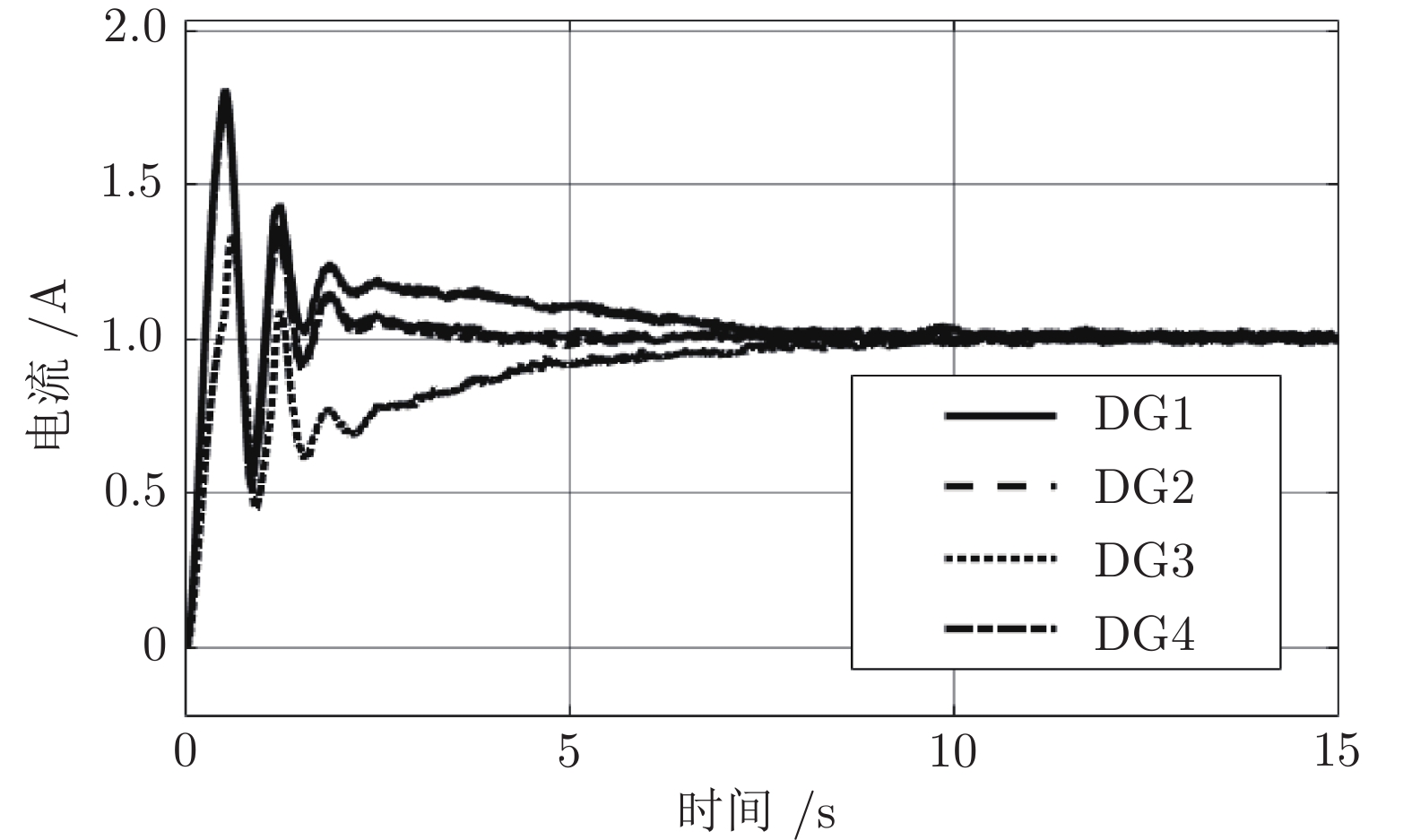
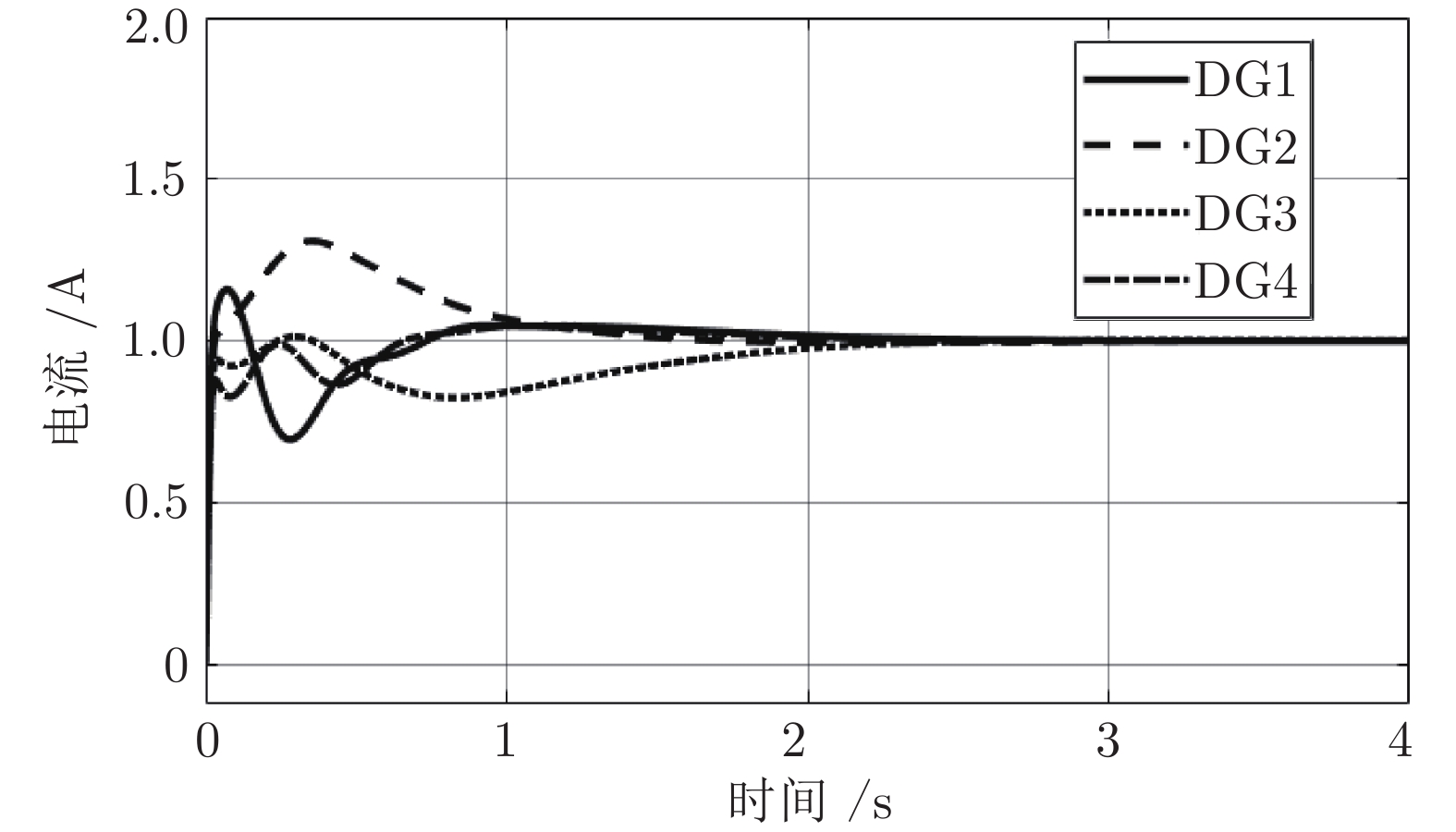
图 14 基于本文方法的微电网系统实时电流
Fig. 14 Real-time current of distributed generators in the microgrid system based on this paper
符号 含义说明 $D{G_i}$ 第 i 个分布式电源 (风机或光伏) N 可再生能源的数目 M 负载的数量 ${L_{rec}}$ 风机电能变换器的输入电感 ${L_{boo}}$ 光伏电能变换器的输入电感 ${C_{dc}}$ 风/光电能变换器的输出电容 ${V_{dc}}$ 风/光电能变换器的输出电压 ${e_d}$ 风机电能变换器 d 轴电源电压 ${e_ q }$ 风机电能变换器 q 轴电源电压 ${i_d}$ 风机电能变换器 d 轴输入电流 ${i_ q }$ 风机电能变换器 q 轴输入电流 ${V_d}$ 风机电能变换器 d 轴输入电压 ${V_ q }$ 风机电能变换器 q 轴输入电压 ${d_d}$ 风机电能变换器 d 轴开关函数 ${d_ q }$ 风机电能变换器 q 轴开关函数 $\omega $ 风机电能变换器交流转速 $d$ 风机电能变换器等效占空比 ${m_i}$ 可再生能源$D{G_i}$的比例系数 ${V_{ref}}$ 直流母线的参考电压 $h$ 采样/控制时间间隔 ${u_i}\left( k \right)$ 在时刻${t_k}$的控制变量 ${R_i}$ $D{G_i}$与直流母线间的传输阻抗 ${R_{Lj}}$ 微电网中第 j 个负载 ${E_{Ii}}(k)$ 电流分担偏差 ${E_v}(k)$ 电压恢复偏差 $\alpha $ 折扣因子 $a,b,c$ 三个正值权重 $J_i^\# $ 最优值函数 $u_i^\# $ 最优策略 HJB 哈密顿−雅克比−贝尔曼 ${w_i}$ 期望控制器 ${l_c}$ 评价网络的学习率 $p$ 迭代次数编号 $W_a^1(k)$ 输入层到隐含层的权重参数 $W_a^2(k)$ 隐含层到输出层的权重参数 ${l_a}$ 执行网络的学习率  下载: 导出CSV
下载: 导出CSV
-
[1] Schäfer B, Beck C, Aihara K, Witthaut D, Timme M. Non-gaussian power grid frequency fluctuations characterized by lévy-stable laws and superstatistics. Nature Energy, 2018, 3(2): 119-126 doi: 10.1038/s41560-017-0058-z [2] 王睿, 孙秋野, 张化光. 信息能源系统的信-物融合稳定性分析. 自动化学报, DOI: 10.16383/j.aas.c210480Wang Rui, Sun Qiu-Ye, Zhang Hua-Guang. Stability analysis of cyber-physical fusion in cyber-energy systems. Acta Automatica Sinica, DOI: 10.16383/j.aas.c210480 [3] 胡旭光, 马大中, 郑君, 张化光, 王睿. 基于关联信息对抗学习的综合能源系统运行状态分析方法. 自动化学报, 2020, 46(9): 1783-1797Hu Xu-Guang, Ma Da-Zhong, Zheng Jun, Zhang Hua-Guang, Wang Rui. An operation state analysis method for integrated energy system based on correlation information adversarial learning. Acta Automatica Sinica, 2020, 46(9): 1783-1797 [4] 孙秋野, 胡旌伟, 杨凌霄, 张化光. 基于GAN技术的自能源混合建模与参数辨识方法. 自动化学报, 2018, 44(5): 901-914Sun Qiu-Ye, Hu Jing-Wei, Yang Ling-Xiao, Zhang Hua-Guang. We-energy hybrid modeling and parameter identification with GAN technology. Acta Automatica Sinica, 2018, 44(5): 901-914 [5] Sekander S, Tabassum H, Hossain E. Statistical performance modeling of solar and wind-powered UAV communications. IEEE Transactions on Mobile Computing, 2021, 20(8): 2686-2700 doi: 10.1109/TMC.2020.2983955 [6] Liu X K, Jiang H, Wang Y W, He H B. A distributed iterative learning framework for DC microgrids: Current sharing and voltage regulation. IEEE Transactions on Emerging Topics in Computational Intelligence, 2020, 4(2): 119-129 doi: 10.1109/TETCI.2018.2863747 [7] Mehrjerdi H, Hemmati R, Shafie-khah M, Catalão J P S. Zero energy building by multicarrier energy systems including hydro, wind, solar, and hydrogen. IEEE Transactions on Industrial Informatics, 2021, 17(8): 5474-5484 doi: 10.1109/TII.2020.3034346 [8] J. M. Guerrero, M. Chandorkar, T. Lee and P. C. Loh. Advanced Control Architectures for Intelligent Microgrids—Part I: Decentralized and Hierarchical Control. IEEE Transactions on Industrial Electronics [9] Zhou T P, Sun W. Optimization of battery-supercapacitor hybrid energy storage station in wind/solar generation system. IEEE Transactions on Sustainable Energy, 2014, 5(2): 408-415 doi: 10.1109/TSTE.2013.2288804 [10] Ma G, Xu G C, Chen Y X, Ju R. Multi-objective optimal configuration method for a standalone wind-solar-battery hybrid power system. IET Renewable Power Generation, 2017, 11(1): 194-202 doi: 10.1049/iet-rpg.2016.0646 [11] Aquila G, de Queiroz A R, Lima L M M, Balestrassi P P, Lima J W M, Pamplona E O. Modelling and design of wind-solar hybrid generation projects in long-term energy auctions: A multi-objective optimisation approach. IET Renewable Power Generation, 2020, 14(14): 2612-2619 doi: 10.1049/iet-rpg.2020.0185 [12] Kong X B, Liu X J, Ma L L, Lee K Y. Hierarchical distributed model predictive control of standalone wind/solar/battery power system. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(8): 1570-1581 doi: 10.1109/TSMC.2019.2897646 [13] Chen J W, Chen J. Stability analysis and parameters optimization of islanded microgrid with both ideal and dynamic constant power loads. IEEE Transactions on Industrial Electronics, 2018, 65(4): 3263-3274 doi: 10.1109/TIE.2017.2756588 [14] Urtasun A, Sanchis P, Marroyo L. State-of-charge-based droop control for stand-alone AC supply systems with distributed energy storage. Energy Conversion and Management, 2015, 106: 709-720 doi: 10.1016/j.enconman.2015.10.010 [15] Lu X N, Guerrero J M, Sun K, Vasquez J C. An improved droop control method for DC microgrids based on low bandwidth communication with DC bus voltage restoration and enhanced current sharing accuracy. IEEE Transactions on Power Electronics, 2014, 29(4): 1800-1812 doi: 10.1109/TPEL.2013.2266419 [16] Han R K, Tucci M, Martinelli A, Guerrero J M, Ferrari-Trecate G. Stability analysis of primary plug-and-play and secondary leader-based controllers for DC microgrid clusters. IEEE Transactions on Power Systems, 2019, 34(3): 1780-1800 doi: 10.1109/TPWRS.2018.2884876 [17] 孙秋野, 王一帆, 杨凌霄, 张化光. 比特驱动的瓦特变革—信息能源系统研究综述. 自动化学报, 2021, 4701): 50-63Sun Qiu-Ye, Wang Yi-Fan, Yang Ling-Xiao, Zhang Hua-Guang. Bit-driven watt revolution—a review of cyber energy system. Acta Automatica Sinica, 2021, 47(1): 50-63 [18] Liu X K, He H B, Wang Y W, Xu Q W, Guo F H. Distributed hybrid secondary control for a DC microgrid via discrete-time interaction. IEEE Transactions on Energy Conversion, 2018, 33(4): 1865-1875 doi: 10.1109/TEC.2018.2850279 [19] Nasirian V, Moayedi S, Davoudi A, Lewis F L. Distributed cooperative control of DC microgrids. IEEE Transactions on Power Electronics, 2015, 30(4): 2288-2303 doi: 10.1109/TPEL.2014.2324579 [20] Wang P B, Lu X N, Yang X, Wang W, Xu D G. An improved distributed secondary control method for DC microgrids with enhanced dynamic current sharing performance. IEEE Transactions on Power Electronics, 2016, 31(9): 6658-6673 doi: 10.1109/TPEL.2015.2499310 [21] Nasirian V, Davoudi A, Lewis F L, Guerrero J M. Distributed adaptive droop control for DC distribution systems. IEEE Transactions on Energy Conversion, 2014, 29(4): 944-956 doi: 10.1109/TEC.2014.2350458 [22] Tucci M, Riverso S, Ferrari-Trecate G. Line-independent plug-and-play controllers for voltage stabilization in DC microgrids. IEEE Transactions on Control Systems Technology, 2018, 26(3): 1115-1123 doi: 10.1109/TCST.2017.2695167 [23] Sadabadi M S, Shafiee Q, Karimi A. Plug-and-play robust voltage control of DC microgrids. IEEE Transactions on Smart Grid, 2018, 9(6): 6886-6896 doi: 10.1109/TSG.2017.2728319 [24] Zhou J G, Xu Y L, Sun H B, Wang L M, Chow M Y. Distributed event-triggered H∞ consensus based current sharing control of DC microgrids considering uncertainties. IEEE Transactions on Industrial Informatics, 2020, 16(12): 7413-7425 doi: 10.1109/TII.2019.2961151 [25] Liu X K, Wang Y W, Lin P F, Wang P. Distributed supervisory secondary control for a DC microgrid. IEEE Transactions on Energy Conversion, 2020, 35(4): 1736-1746 doi: 10.1109/TEC.2020.2994251 [26] Wei Q L, Zhu L, Song R Z, Zhang P J, Liu D R, Xiao J. Model-free adaptive optimal control for unknown nonlinear multiplayer nonzero-sum game. IEEE Transactions on Neural Networks and Learning Systems, DOI: 10.1109/TNNLS.2020.3030127 [27] 王鼎, 穆朝絮, 刘德荣. 基于迭代神经动态规划的数据驱动非线性近似最优调节. 自动化学报, 2017, 43(3): 366-375Wang Ding, Mu Chao-Xu, Liu De-Rong. Data-driven nonlinear near-optimal regulation based on iterative neural dynamic programming. Acta Automatica Sinica, 2017, 43(3): 366-375 [28] Wei Q L, Lewis F L, Shi G, Song R Z. Error-tolerant iterative adaptive dynamic programming for optimal renewable home energy scheduling and battery management. IEEE Transactions on Industrial Electronics, 2017, 64(12): 9527-9537 doi: 10.1109/TIE.2017.2711499 [29] 袁兆麟, 何润姿, 姚超, 李佳, 班晓娟. 基于强化学习的浓密机底流浓度在线控制算法. 自动化学报, 2021, 47(7): 1558-1571Yuan Zhao-Lin, He Run-Zi, Yao Chao, Li Jia, Ban Xiao-Juan. Online reinforcement learning control algorithm for concentration of thickener underflow. Acta Automatica Sinica, 2021, 47(7): 1558-1571 [30] Wang R, Sun Q Y, Ma D Z, Qin D H, Gui Y H, Wang P. Line inductance stability operation domain assessment for weak grids with multiple constant power loads. IEEE Transactions on Energy Conversion, 2021, 36(2): 1045-1055 doi: 10.1109/TEC.2020.3021070 [31] Wen B, Boroyevich D, Burgos R, Mattavelli P, Shen Z Y. Inverse nyquist stability criterion for grid-tied inverters. IEEE Transactions on Power Electronics, 2017, 32(2): 1548-1556 doi: 10.1109/TPEL.2016.2545871 [32] Sun Q Y, Han R K, Zhang H G, Zhou J G, Guerrero J M. A multiagent-based consensus algorithm for distributed coordinated control of distributed generators in the energy internet. IEEE Transactions on Smart Grid, 2015, 6(6): 3006-3019 doi: 10.1109/TSG.2015.2412779 [33] Nasirian V, Shafiee Q, Guerrero J M, Lewis F L, Davoudi A. Droop-free distributed control for AC microgrids. IEEE Transactions on Power Electronics, 2016, 31(2): 1600-1617 doi: 10.1109/TPEL.2015.2414457 [34] Yang X, Wei Q L. Adaptive critic learning for constrained optimal event-triggered control with discounted cost. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(1): 91-104 doi: 10.1109/TNNLS.2020.2976787 [35] Wang R, Sun Q Y, Tu P F, Xiao J F, Gui Y H, Wang P. Reduced-order aggregate model for large-scale converters with inhomogeneous initial conditions in DC microgrids. IEEE Transactions on Energy Conversion, 2021, 36(3): 2473-2484 doi: 10.1109/TEC.2021.3050434 -

 下载:
下载:



计量
- 文章访问数: 1887
- HTML全文浏览量: 620
- PDF下载量: 264
- 被引次数: 0
