

Data-driven Operating Monitoring for Coal-fired Power Generation Equipment: The State of the Art and Challenge
-
摘要: 大容量、高参数、低能耗的百万千瓦超超临界机组是燃煤发电领域的重大装备, 已成为全国电力工业发展的主流方向, 其安全可靠运行对推动发电企业转型升级具有重要意义. 本文从分析以百万千瓦超超临界机组为代表的燃煤发电装备的本质特性出发, 揭示了其变负荷深度调峰导致的非平稳运行特性和全流程复杂耦合特性, 总结了燃煤发电过程区别于一般连续过程的问题, 指出了研究燃煤发电装备运行工况监控算法的必要性. 进而, 基于这些特性, 我们对面向燃煤发电装备工况监控的数据驱动算法近30年的发展进行了回顾和分析, 展示了算法发展的不同阶段. 在此基础上, 梳理了目前燃煤发电装备工况监控中存在的问题, 并进一步介绍了燃煤发电装备工况监控未来可能的发展方向.Abstract: As major equipment in coal-fired power generation, 1000 MW ultra-supercritical unit has advantages of large capacity, high parameter and low energy consumption, which has become the mainstream of the development of the power industry in China. Its safety and reliability in operation are of great significance to promote the transformation and upgrading of power generation enterprises. Starting from the analysis of essential characteristics of coal-fired power generation equipment, this article revealed the nonstationary operation characteristics caused by the variable load, deep peak shaving, and the complex correlation characteristics of the whole process. Then, it summarized the problems that the coal-fired power generation process is different from general continuous processes, and points out the necessity of studying monitoring algorithms for coal-fired power generation equipment. Furthermore, based on these characteristics, it reviewed and analyzed the development of the data-driven algorithms for coal-fired power generation equipment monitoring in the past 30 years, showing different stages of algorithm development. On this basis, this article presented the current problems in operation monitoring of coal-fired power generation equipment, and further introduced the possible development direction in the future.
-

图 1 发电过程能量转化简图(虚线框内为热力系统的能量转化过程)
Fig. 1 Energy conversion diagram of power generation process (Energy conversion process of thermal system is shown in the dotted box)

图 2 百万千瓦超超临界机组非平稳运行轨迹示意图
Fig. 2 Schematic of non-stationary operation trajectory of 1000 MW ultra-supercritical unit
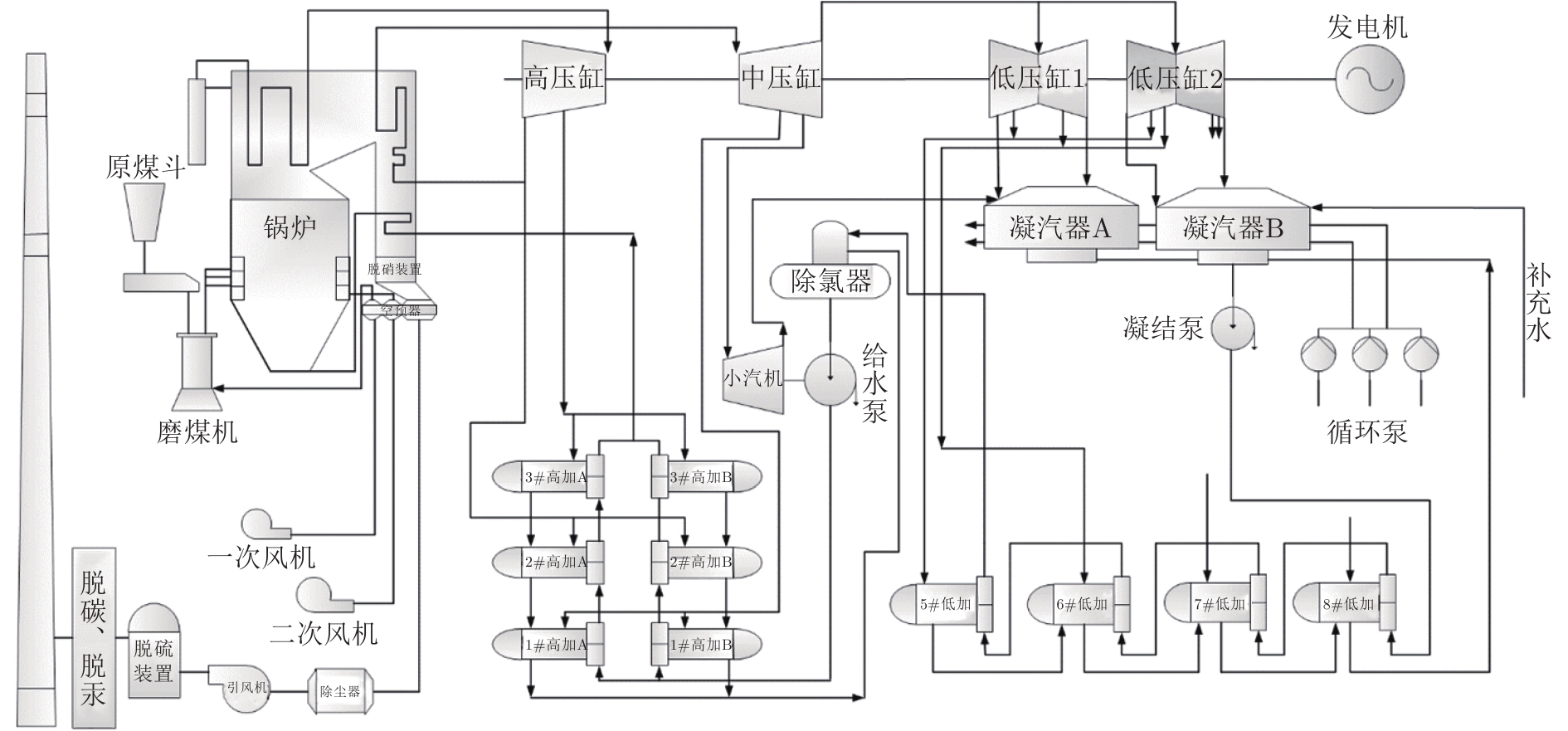
图 3 百万千瓦超超临界机组全流程运行示意图
Fig. 3 Schematic of the full-condition operation of 1000 MW ultra-supercritical unit
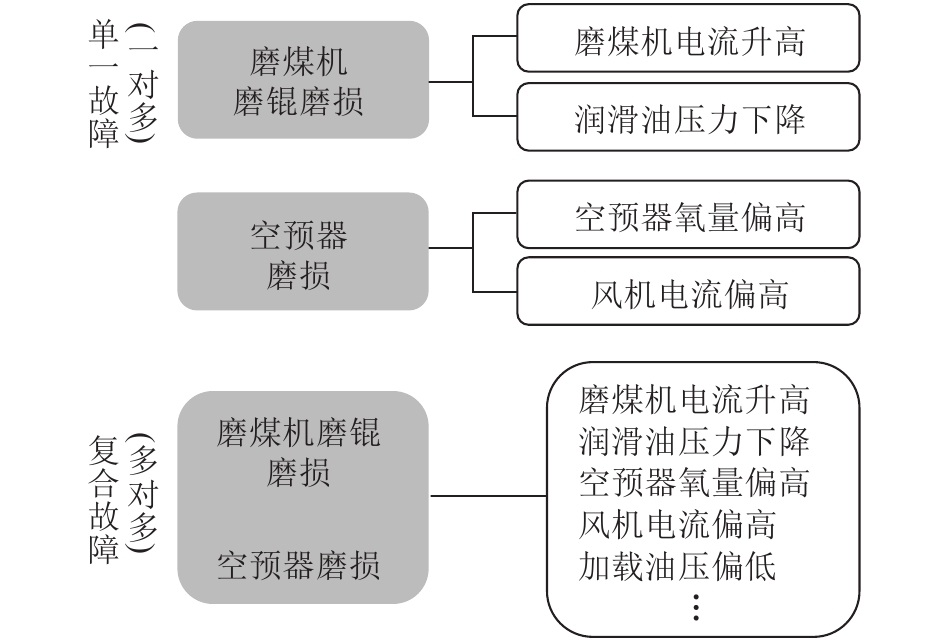
图 4 磨煤机磨辊磨损与空预器磨损的故障表征示意图
Fig. 4 Diagram of fault characterization of coal mill roller wear and air preheater wear
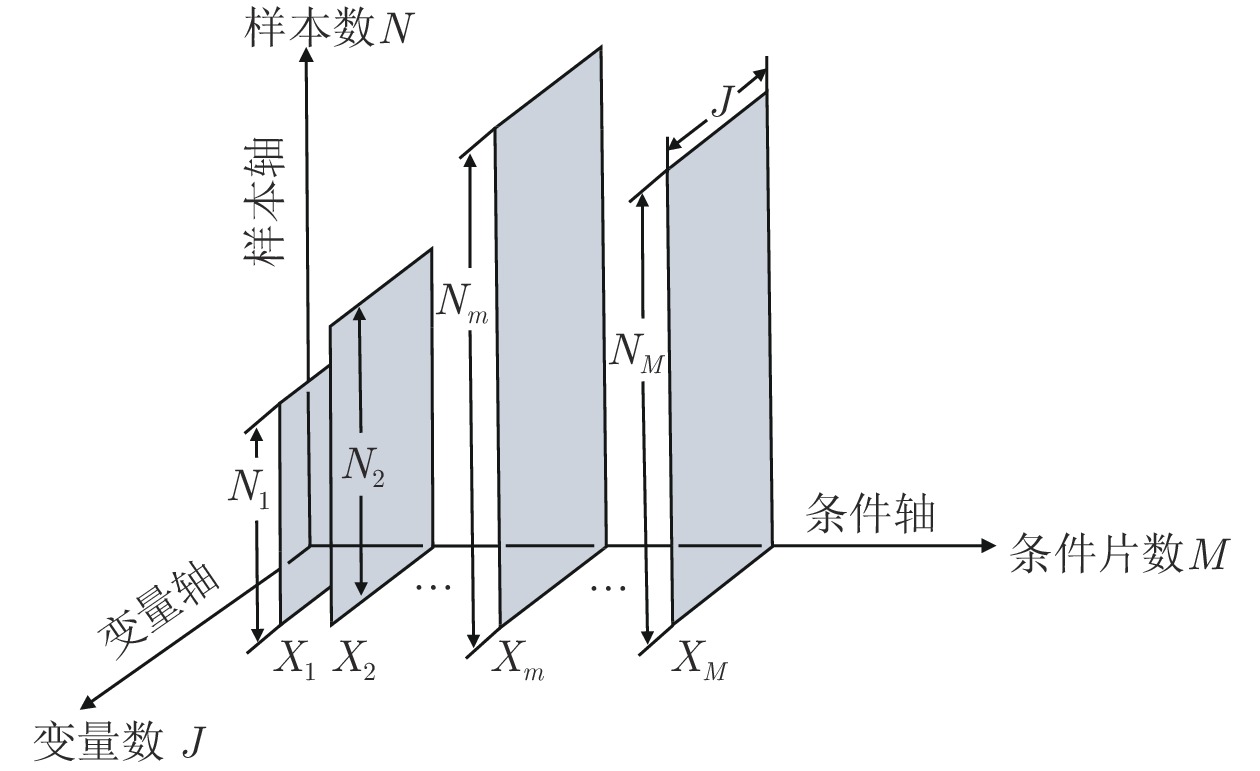
图 5 条件轴数据重组(从时间轴非平稳数据到条件轴不同条件片)
Fig. 5 Rearranging data according to condition axis (from nonstationary data on time axis to different condition slices on condition axis)
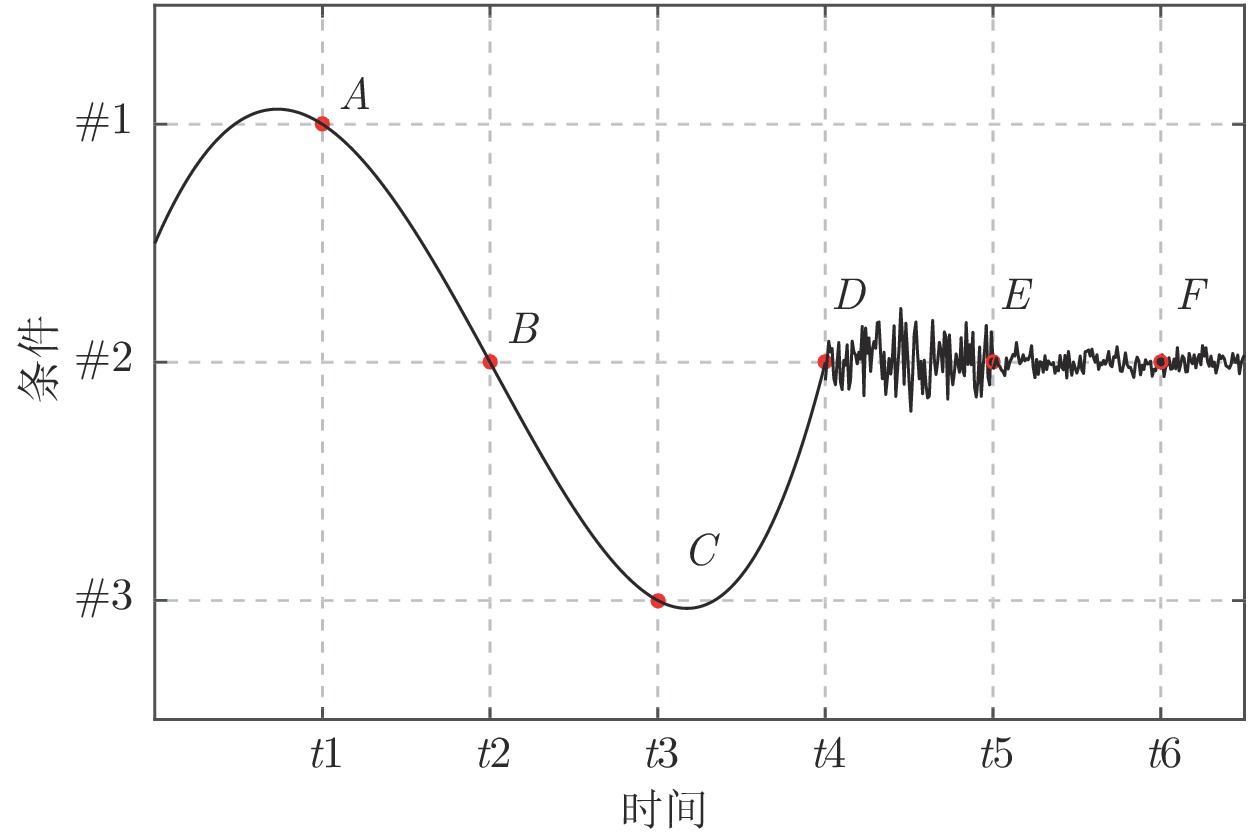
图 6 不同运行条件上的过程动态变化示意图
Fig. 6 Illustration of process dynamics under different operating conditions

图 7 发电设备运行工况监控方法发展趋势示意图
Fig. 7 Schematic of development trend of operation monitoring methods of power generation equipment
表 1 基于解析模型和数据驱动的发电装备工况监控方法总结
Table 1 A comparing summary between analytical-model-based methods and data-driven methods for condition monitoring of power generation equipment
类型 方法 原理 优点 缺点 应用对象举例 基于解
析模型数学模型
的方法建立精确的数学模型和可观测输入输出量构造残差信号来反映装备期望行为与实际运行模式间是否一致 1) 可靠, 精确
2) 模型通用性强
3) 机理解释性强1) 领域知识需求高
2) 模型参数辨识难
3) 复杂对象耗时长1) 基于多模型状态估计的除氧器状态监测和故障诊断[39]
2) 基于观测器残差模型的加热器性能监测[40-41]
3) 基于简化数学模型的回热加热器在线工况监控[42]等数据
驱动多元统计
的方法对历史过程数据进行统计分析, 比较正常样本估算得到的监控指标置信限和每个样本的监控统计量以确定当前样本的运行状态 1) 无需假设或对参数进行经验估计
2) 降维能力强
3) 算法解释性强, 参数易调整.1) 处理非高斯、多模态、非线性数据时, 效果较差
2) 忽视数据微小特征对结果的影响1) 基于主元分析相关的电厂状态监测[45-47]
2) 基于向量自回归模型的设备故障预测[51-52]
3) 基于潜空间投影的运行过程性能评估和状态监测[53, 55]等人工智能
的方法利用人工智能算法模拟和实现人类的思维和行为, 自动完成工况监控过程 1) 实时数据分析, 减少人工干预
2) 强大的非线性表达能力和自适应学习能力1) 黑箱模型, 参数和模型不易理解
2) 对数据质量和规模要求高1) 基于混合优化递归神经网络的热力系统实时预测[66]
2) 基于人工神经网络和最优变焦搜索的加热器故障诊断[67]等 下载: 导出CSV
下载: 导出CSV
表 2 三类非平稳分析方法对比总结
Table 2 Comparison and summary of three types of non-stationary analysis methods
类型 方法 优点 缺点 应用实例 典型非平稳分析方法 信号处理方法 能处理非平稳非线性信号 应用对象局限于高频振动信号 1) 经验模态分解[85] 处理非线性非平稳时间序列
2) 应用小波变换[75] 对齿轮箱振动信号进行故障诊断自适应策略 快速适应新模式, 计算效率高 无法有效区分正常的变化和缓变故障 1) 应用递归PCA[34] 进行自适应过程监测
2) 应用递归指数慢特征分析[84] 进行自适应过程监测基于协整分析的方法 模型数量少、有效时间长 应用对象局限于存在协整关系的变量 1) 协整分析结合慢特征分析[96] 进行全工况过程监测
2) 稀疏协整分析[99] 进行分布式过程监测时间驱动的多模式分析方法 统计检验或平稳性指标判断法 计算效率高 模式划分粗糙, 未考虑多变量间的关系 1) 利用统计检验[104] 确定稳态工况
2) 利用稳定性因子[105] 进行模式划分特性变化度量与模式划分策略 自动划分模式 模式数量大且冗余; 在线工况确认难 文献[8, 57, 106−107] 指出可以根据过程变量相关关系的变化反推过程特性的变化, 从而将运行状态分为不同模式 高斯混合模型聚类方法 拟合能力强, 自动聚类 需预先指定模式数量 利用高斯混合模型 (Gaussian mixed model, GMM) 进行多工况划分进而进行故障诊断[108] 软过渡方法 模式划分更合理, 监测模型更灵敏 模式划分结果复杂, 可解释性较差 1) 建立了一种软过渡PCA模型[109] 进行过程监测
2) 文献 [110] 进一步发展了软时段过渡方法条件驱动的多模式分析方法 有序条件模式划分方法 从条件轴出发, 消除了非平稳特性的影响, 抓住了工况变化的本质 硬划分, 在模式边界处的样本归属可能不够合理; 同时对过渡过程进行了合并简化处理 文献 [114] 提出了多条件模式的表征理论方法, 有利于不同模式内关键信息的分析与提取, 显著提高了模型的精度, 并在百万千瓦超超临界机组上进行了验证
下载: 导出CSV
表 3 动态潜投影建模方法比较
Table 3 Comparison of dynamic latent projecting methods
方法 目标 模型参数 优化解 静动信息
是否分离是否实现降维 优点 缺点 动态主元分析 DPCA[133] 最大化潜变量的方差 1个时延参数、潜变量个数 特征根分解1次 否 否, 潜变量维度随时延增加, 可能会大于原始数据维度 求解简单, 传统方法可直接使用 1) 无法实现动态与静态信息的分离
2) 所提取潜变量易受静态信息主导动态潜变量模型 DLV[135] 最大化潜变量线性组合的方差 1个时延参数、潜变量个数 迭代求解, 每次找到一个潜变量 否 是 具有降维能力 1) 无法实现动态与静态信息的分离
2) 所提取潜变量易受静态信息主导动态内部主元分析DiPCA[136] 最大化潜变量与其预测值的协方差 1个时延参数、潜变量个数 迭代求解, 每次找到一个潜变量 是 是 具有降维能力, 且实现了动静态信息的分开监测 未直接按照时序性强弱提取潜变量 状态空间模型CVA[137] 最大化潜变量的时序相关性 2个时延参数、潜变量个数 奇异值分解1次 是 否, 潜变量维度随时延增加, 可能会大于原始数据维度 求解简单, 实现了动静态信息的分开监测 数据共线性时求解不稳定 慢特征分析SFA[139] 最大化潜变量的变化速度, 即一阶自相关性 潜变量个数 特征根分解2次 是 是 具有降维能力, 实现对数据变化速度的表征 只关注了数据的一阶时序相关性
下载: 导出CSV
-
[1] 郝思鹏, 黄贤明, 刘海涛. 1 000 MW 超超临界火电机组电气设备及运行. 南京: 东南大学出版社, 2014.Hao Si-Peng, Huang Xian-Ming, Liu Hai-Tao. 1 000 MW Ultra Supercritical Thermal Power Generating Units Electrical Equipmeng and Its Operation. Nanjing: Southeast University Press, 2014. [2] 华电电力科学研究院有限公司. 火力发电机组设备故障停运典型案例分析. 北京: 中国电力出版社, 2020.Huadian Electric Power Research Institute Co., Ltd. Typical Case Analysis of Equipment Failure and Shutdown of Thermal Power Generating Unit. Beijing: China Electric Power Press, 2020. [3] 华志刚. 发电行业人工智能应用. 北京: 中国电力出版社, 2020.Hua Zhi-Gang. Artificial Intelligence Application of Power Generation Industry. Beijing: China Electric Power Press, 2020. [4] 赵春晖, 王福利. 工业过程运行状态智能监控: 数据驱动方法. 北京: 化学工业出版社, 2019.Zhao Chun-Hui, Wang Fu-Li. Intelligent Monitoring of Industrial Process Operation Status: Data-Driven Methods. Beijing: Chemical Industry Press, 2019. [5] 姜庆超, 颜学峰. 基于局部 - 整体相关特征的多单元化工过程分层监测. 自动化学报, 2020, 46(9): 1770-1782Jiang Qing-Chao, Yan Xue-Feng. Hierarchical monitoring for multi-unit chemical processes based on local-global correlation features. Acta Automatica Sinica, 2020, 46(9): 1770-1782 [6] 毛文涛, 田思雨, 窦智, 张迪, 丁玲. 一种基于深度迁移学习的滚动轴承早期故障在线检测方法. 自动化学报, 2022, 48(1): 302-314Mao Wen-Tao, Tian Si-Yu, Dou Zhi, Zhang Di, Ding Ling. A new deep transfer learning-based online detection method of rolling bearing early fault. Acta Automatica Sinica, 2022, 48(1): 302-314 [7] Yu K, Lin T R, Ma H, Li X, Li X. A multi-stage semi-supervised learning approach for intelligent fault diagnosis of rolling bearing using data augmentation and metric learning. Mechanical Systems and Signal Processing, 2021, 146: Article No. 107043 doi: 10.1016/j.ymssp.2020.107043 [8] 赵春晖, 陆宁云. 间歇过程统计监测与质量分析. 北京: 科学出版社, 2014.Zhao Chun-Hui, Lu Ning-Yun. Statistical Monitoring and Quality Analysis of Batch Process. Beijing: Science Press, 2014. [9] 刘强, 秦泗钊. 过程工业大数据建模研究展望, 自动化学报, 2016, 42(2): 161-171Liu Qiang, Qin S J. Perspectives on big data modeling of process industries. Acta Automatica Sinica, 2016, 42(2): 161-171 [10] Qin S J. Process data analytics in the era of big data. AIChE Journal, 2014, 60(9): 3092-3100 doi: 10.1002/aic.14523 [11] Hajjaji Y, Boulila W, Farah I R, Romdhani I, Hussain A. Big data and IoT-based applications in smart environments: A systematic review. Computer Science Review, 2021, 39: Article No. 100318 doi: 10.1016/j.cosrev.2020.100318 [12] Hsu C C, Su C T. An adaptive forecast-based chart for non-Gaussian processes monitoring: With application to equipment malfunctions detection in a thermal power plant. IEEE Transactions on Control Systems Technology, 2011, 19(5): 1245-1250 doi: 10.1109/TCST.2010.2083664 [13] 唐鹏, 彭开香, 董洁. 一种新颖的深度因果图建模及其故障诊断方法. 自动化学报, 2022, 48(6): 1616−1624Tang Peng, Peng Kai-Xiang, Dong Jie. A novel method for deep causality graph modeling and fault diagnosis. Acta Automatica Sinica, 2022, 48(6): 1616−1624 [14] Jordan M I, Mitchell T M. Machine learning: Trends, perspectives, and prospects. Science, 2015, 349(6245): 255-260 doi: 10.1126/science.aaa8415 [15] Chai Z, Zhao C H. Enhanced random forest with concurrent analysis of static and dynamic nodes for industrial fault classification. IEEE Transactions on Industrial Informatics, 2020, 16(1): 54-66 doi: 10.1109/TII.2019.2915559 [16] Chen J H, Zhao C H. Exponential stationary subspace analysis for stationary feature analytics and adaptive nonstationary process monitoring. IEEE Transactions on Industrial Informatics, 2021, 17(12): 8345-8356 doi: 10.1109/TII.2021.3053308 [17] LeCun Y, Bengio Y, Hinton G. Deep learning. Nature, 2015, 521(7553): 436-444 doi: 10.1038/nature14539 [18] Chai Z, Zhao C H, Huang B. Multisource-refined transfer network for industrial fault diagnosis under domain and category inconsistencies. IEEE Transactions on Cybernetics, 2022, 52(9): 9784−9796 [19] Harrou F, Sun Y, Hering A S, Madakyaru M, Dairi A. Unsupervised deep learning-based process monitoring methods. Statistical Process Monitoring Using Advanced Data-Driven and Deep Learning Approaches: Theory and Practical Applications. Amsterdam: Elsevier, 2021. 193−223 [20] Feng L J, Zhao C H. Transfer increment for generalized zero-shot learning. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(6): 2506-2520 doi: 10.1109/TNNLS.2020.3006322 [21] Yu W K, Zhao C H. Online fault diagnosis for industrial processes with Bayesian network-based probabilistic ensemble learning strategy. IEEE Transactions on Automation Science and Engineering, 2019, 16(4): 1922-1932 doi: 10.1109/TASE.2019.2915286 [22] Chen T Q, Guestrin C. XGBoost: A scalable tree boosting system. In: Proceedings of the 22nd ACM SIGKDD International Conference Knowledge Discovery and Data Mining. San Francisco, USA: ACM, 2016. 785−794 [23] Huang G, Song S J, Gupta J N D, Wu C. Semi-supervised and unsupervised extreme learning machines. IEEE Transactions on Cybernetics, 2014, 44(12): 2405-2417 doi: 10.1109/TCYB.2014.2307349 [24] Kong X B, Liu X J, Lee K Y. An effective nonlinear multivariable HMPC for USC power plant incorporating NFN-based modeling. IEEE Transactions on Industrial Informatics, 2016, 12(2): 555-566 doi: 10.1109/TII.2016.2520579 [25] 广东电网公司电力科学研究院. 1 000 MW 超超临界火电机组技术丛书: 电气设备及系统. 北京: 中国电力出版社, 2014.Electric Power Research Institute of Guangdong Power Grid Corporation. Technical Series of 1 000 MW Ultra Supercritical Thermal Power Unit: Electrical Equipment and System. Beijing: China Power Press, 2014. [26] Brockwell P J, Davis R A. Time Series: Theory and Methods. New York: Springer, 2006. [27] Sheng N, Liu Q, Qin S J, Chai T Y. Comprehensive monitoring of nonlinear processes based on concurrent kernel projection to latent structures. IEEE Transactions on Automation Science and Engineering, 2016, 13(2): 1129-1137 doi: 10.1109/TASE.2015.2477272 [28] Yu W K, Zhao C H. Robust monitoring and fault isolation of nonlinear industrial processes using denoising autoencoder and elastic net. IEEE Transactions on Control Systems Technology, 2020, 28(3): 1083-1091 doi: 10.1109/TCST.2019.2897946 [29] Lee S, Kwak M, Tsui K L, Kim S B. Process monitoring using variational autoencoder for high-dimensional nonlinear processes. Engineering Applications of Artificial Intelligence, 2019, 83: 13-27 doi: 10.1016/j.engappai.2019.04.013 [30] Mori J, Yu J. Quality relevant nonlinear batch process performance monitoring using a kernel based multiway non-Gaussian latent subspace projection approach. Journal of Process Control, 2014, 24(1): 57-71 doi: 10.1016/j.jprocont.2013.10.017 [31] Wang J, Zhao C H. A Gaussian feature analytics-based DISSIM method for fine-grained non-Gaussian process monitoring. IEEE Transactions on Automation Science and Engineering, 2020, 17(4): 2175-2181 doi: 10.1109/TASE.2020.3013654 [32] Ying A N, Zeng J S, Kruger U, Luo S H, Xie L. Hierarchical density decompositions for abnormal event diagnosis in serially correlated non-Gaussian systems. Control Engineering Practice, 2020, 96: Article No. 104295 doi: 10.1016/j.conengprac.2019.104295 [33] Zhang S M, Zhao C H. Concurrent analysis of variable correlation and data distribution for monitoring large-scale processes under varying operation conditions. Neurocomputing, 2019, 349: 225-238 doi: 10.1016/j.neucom.2019.03.061 [34] Li W H, Yue H H, Valle-Cervantes S, Qin S J. Recursive PCA for adaptive process monitoring. Journal of Process Control, 2000, 10(5): 471-486 doi: 10.1016/S0959-1524(00)00022-6 [35] Chen Z W, Liu C, Ding S X, Peng T, Yang C H, Gui W H, et al. A just-in-time-learning-aided canonical correlation analysis method for multimode process monitoring and fault detection. IEEE Transactions on Industrial Electronics, 2021, 68(6): 5259-5270 doi: 10.1109/TIE.2020.2989708 [36] Feng L J, Zhao C H, Huang B. A slow independent component analysis algorithm for time series feature extraction with the concurrent consideration of high-order statistic and slowness. Journal of Process Control, 2019, 84: 1-12 doi: 10.1016/j.jprocont.2019.09.005 [37] Zhang S M, Zhao C H, Huang B. Simultaneous static and dynamic analysis for fine-scale identification of process operation statuses. IEEE Transactions on Industrial Informatics, 2019, 15(9): 5320-5329 doi: 10.1109/TII.2019.2896987 [38] Zheng J L, Zhao C H. Online monitoring of performance variations and process dynamic anomalies with performance-relevant full decomposition of slow feature analysis. Journal of Process Control, 2019, 80: 89-102 doi: 10.1016/j.jprocont.2019.05.004 [39] Kim K Y, Lee Y J. Fault detection and diagnosis of the deaerator level control system in nuclear power plants. Journal of the Korean Nuclear Society, 2004, 36(1): 73-82 [40] Koppen-Seliger B, Kiupel N, Kellinghaus H S, Frank P M. A fault diagnosis concept for a high-pressure-preheater line. In: Proceedings of the 34th IEEE Conference on Decision and Control. New Orleans, USA: IEEE Press, 1995. 2383−2388 [41] Barszcz T, Czop P. A feedwater heater model intended for model-based diagnostics of power plant installations. Applied Thermal Engineering, 2011, 31(8-9): 1357-1367 doi: 10.1016/j.applthermaleng.2010.12.012 [42] 于刚. 电站热力系统故障诊断与操作指导的研究 [博士学位论文]. 东南大学, 中国, 2000.Yu Gang. Research on Fault Diagnosis and Operation Guidance of Thermal System in Power Plant [Ph.D. dissertation], Nanjing University, China, 2000. [43] Cai J J, Ma X Q, Li Q. On-line monitoring the performance of coal-fired power unit: A method based on support vector machine. Applied Thermal Engineering, 2009, 29(11-12): 2308-2319 doi: 10.1016/j.applthermaleng.2008.11.012 [44] Yu W K, Zhao C H, Huang B. Stationary subspace analysis-based hierarchical model for batch processes monitoring. IEEE Transactions on Control Systems Technology, 2021, 29(1): 444-453 doi: 10.1109/TCST.2020.2974147 [45] Ajami A, Daneshvar M. Data driven approach for fault detection and diagnosis of turbine in thermal power plant using independent component analysis (ICA). International Journal of Electrical Power & Energy Systems, 2012, 43(1): 728-735 [46] 邱凤翔. 火电机组运行状态监测与故障诊断的研究与应用 [博士学位论文], 东南大学, 中国, 2010.Qiu Feng-Xiang. Research and Application on Condition Monitoring and Fault Diagnosis of Thermal Power Units [Ph.D. dissertation], Southeast University, China, 2010. [47] Sun X, Marquez H J, Chen T W, Riaz M. An improved PCA method with application to boiler leak detection. ISA Transactions, 2005, 44(3): 379-397 doi: 10.1016/S0019-0578(07)60211-0 [48] Song P Y, Zhao C H. Slow down to go better: A survey on slow feature analysis. IEEE Transactions on Neural Networks and Learning Systems, 2022. DOI: 10.1109/TNNLS.2022.3201621. [49] 黄孝彬, 刘吉臻, 牛玉广. 主元分析方法在火电厂锅炉过程故障检测中的应用. 动力工程, 2004, 24(4): 542-547Huang Xiao-Bin, Liu Ji-Zhen, Niu Yu-Gang. Application of PCA-based fault detection in thermal boiler processes. Power Engineering, 2004, 24(4): 542-547 [50] Sreedhar R. Fault Diagnosis and Control of a Thermal Power Plant [Ph.D. dissertation], University of Texas at Austin, USA, 1995. [51] Zhao C H, Gao F R. Online fault prognosis with relative deviation analysis and vector autoregressive modeling. Chemical Engineering Science, 2015, 138(22): 531-543 [52] Zhao C H, Gao F R. Critical-to-fault-degradation variable analysis and direction extraction for online fault prognostic. IEEE Transactions on Control Systems Technology, 2017, 25(3): 842-854 doi: 10.1109/TCST.2016.2576018 [53] Liu Y, Chang Y Q, Wang F L. Online process operating performance assessment and nonoptimal cause identification for industrial processes. Journal of Process Control, 2014, 24(10): 1548-1555 doi: 10.1016/j.jprocont.2014.08.001 [54] 周东华, 魏慕恒, 司小胜. 工业过程异常检测、寿命预测与维修决策的研究进展. 自动化学报, 2013, 39(6): 711-722Zhou Dong-Hua, Wei Mu-Heng, Si Xiao-Sheng. A survey on anomaly detection, life prediction and maintenance decision for industrial processes. Acta Automatica Sinica, 2013, 39(6): 711-722 [55] Zhao C H, Sun H. Dynamic distributed monitoring strategy for large-scale nonstationary processes subject to frequently varying conditions under closed-loop control. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4749-4758 doi: 10.1109/TIE.2018.2864703 [56] Zhao C H, Wang W. Efficient faulty variable selection and parsimonious reconstruction modelling for fault isolation. Journal of Process Control, 2016, 38: 31-41 doi: 10.1016/j.jprocont.2015.12.002 [57] 赵春晖, 余万科, 高福荣. 非平稳间歇过程数据解析与状态监控—回顾与展望. 自动化学报, 2020, 46(10): 2072-2091Zhao Chun-Hui, Yu Wan-Ke, Gao Fu-Rong. Data analytics and condition monitoring methods for nonstationary batch process—current status and future. Acta Automatica Sinica, 2020, 46(10): 2072-2091 [58] Calisto H, Martins N, Afgan N. Diagnostic system for boilers and furnaces using CFD and neural networks. Expert Systems with Applications, 2008, 35(4): 1780-1787 doi: 10.1016/j.eswa.2007.08.091 [59] Fast M, Palmé T. Application of artificial neural networks to the condition monitoring and diagnosis of a combined heat and power plant. Energy, 2010, 35(2): 1114-1120 doi: 10.1016/j.energy.2009.06.005 [60] da Costa R G, de Abreu Mol A C, de Carvalho P V R, Lapa C M F. An efficient Neuro-Fuzzy approach to nuclear power plant transient identification. Annals of Nuclear Energy, 2011, 38(6): 1418-1426 doi: 10.1016/j.anucene.2011.01.027 [61] Rakhshani E, Sariri I, Rouzbehi K. Application of data mining on fault detection and prediction in boiler of power plant using artificial neural network. In: Proceedings of the 2009 International Conference on Power Engineering, Energy and Electrical Drives. Lisbon, Portugal: IEEE Press, 2009. 473−478 [62] 袁小锋, 王雅琳, 阳春华, 桂卫华. 深度学习在流程工业过程数据建模中的应用. 智能科学与技术学报, 2020, 2(2): 107-115Yuan Xiao-Feng, Wang Ya-Lin, Yang Chun-Hua, Gui Wei-Hua. The application of deep learning in data-driven modeling of process industries. Chinese Journal of Intelligent Science and Technology, 2020, 2(2): 107-115 [63] Benazzouz D, Benammar S, Adjerid S. Fault detection and isolation based on neural networks case study: Steam turbine. Energy and Power Engineering, 2011, 3(4): 513-516 doi: 10.4236/epe.2011.34062 [64] Simani S, Fantuzzi C. Fault diagnosis in power plant using neural networks. Information Sciences, 2000, 127(3-4): 125-136 doi: 10.1016/S0020-0255(00)00034-7 [65] Ashraf W M, Uddin G M, Farooq M, Riaz F, Ahmad H A, Kamal A H, et al. Construction of operational data-driven power curve of a generator by industry 4.0 data analytics. Energies, 2021, 14(5): Article No. 1227 doi: 10.3390/en14051227 [66] Wang X X, Ma L Y, Wang B S, Wang T. A hybrid optimization-based recurrent neural network for real-time data prediction. Neurocomputing, 2013, 120: 547-559 doi: 10.1016/j.neucom.2013.04.016 [67] Ma L Y, Ma Y G, Lee K Y. An intelligent power plant fault diagnostics for varying degree of severity and loading conditions. IEEE Transactions on Energy Conversion, 2010, 25(2): 546-554 doi: 10.1109/TEC.2009.2037435 [68] 张文斌. 汽轮发电机组状态趋势预测及故障诊断方法研究 [博士学位论文], 浙江大学, 中国, 2009.Zhang Wen-Bin. Research on State Trend Prediction and Fault Diagnosis Methods for Turbo-Generator Unit [Ph.D. dissertation], Zhejiang University, China, 2009. [69] 黄伟浩. 汽轮发电机组热弯曲故障预警方法研究 [硕士学位论文], 华北电力大学 (北京), 中国, 2016.Huang Wei-Hao. Research on the Early Warning Method of Thermal Bending Failure of Steam Turbine Generator Set [Master thesis], North China Electric Power University (Beijing), China, 2016. [70] Hu Y Y, Zhao C H. Online fault prognostics based on degradation-oriented slow feature analysis and temporal smoothness analysis. In: Proceedings of the 12th Asian Control Conference (ASCC). Kitakyushu, Japan: IEEE, 2019. 844−849 [71] 孙鹤. 数据驱动的复杂非平稳工业过程建模与监测 [博士学位论文], 浙江大学, 中国, 2018.Sun He. Complex Nonstationary Industrial Processes Modeling and Monitoring Based on Data-driven Methods [Ph.D. dissertation], Zhejiang University, China, 2018. [72] Staszewski W J, Tomlinson G R. Application of the wavelet transform to fault detection in a spur gear. Mechanical Systems and Signal Processing, 1994, 8(3): 289-307 doi: 10.1006/mssp.1994.1022 [73] Mahto T, Malik H, Mukherjee V. Condition monitoring, and fault detection and diagnostics of wind energy conversion system (WECS). Soft Computing in Condition Monitoring and Diagnostics of Electrical and Mechanical Systems: Novel Methods for Condition Monitoring and Diagnostics. Springer: Singapore, 2020. 121−154 [74] Kumar R, Ismail M, Zhao W, Noori M, Yadav A R, Chen S B, et al. Damage detection of wind turbine system based on signal processing approach: A critical review. Clean Technologies and Environmental Policy, 2021, 23(2): 561-580 doi: 10.1007/s10098-020-02003-w [75] Wang W J, McFadden P D. Early detection of gear failure by vibration analysis-II. Interpretation of the time-frequency distribution using image processing techniques. Mechanical Systems and Signal Processing, 1993, 7(3): 205-215 doi: 10.1006/mssp.1993.1009 [76] Kim Y H, Lim B D. Instantaneous frequency of a transient mechanical signature and its estimation by a moving window; applicability and physical interpretation. Mechanical Systems and Signal Processing, 1994, 8(4): 381-394 doi: 10.1006/mssp.1994.1029 [77] Schmidt S, Zimroz R, Heyns P S. Enhancing gearbox vibration signals under time-varying operating conditions by combining a whitening procedure and a synchronous processing method. Mechanical Systems and Signal Processing, 2021, 156: Article No. 107668. doi: 10.1016/j.ymssp.2021.107668 [78] Liu Z P, Zhang L. A review of failure modes, condition monitoring and fault diagnosis methods for large-scale wind turbine bearings. Measurement, 2020, 149: Article No. 107002 doi: 10.1016/j.measurement.2019.107002 [79] Loughlin P J, Bernard G D. Cohen-Posch (Positive) time-frequency distributions and their application to machine vibration analysis. Mechanical Systems and Signal Processing, 1997, 11(4): 561-576 doi: 10.1006/mssp.1997.0096 [80] Randall R B. Vibration-Based Condition Monitoring: Industrial, Automotive and Aerospace Applications (2nd edition). Hoboken: John Wiley & Sons, 2021. [81] Huang N E, Wu M L, Qu W, Long S R, Shen S S. Applications of Hilbert-Huang transform to non-stationary financial time series analysis. Applied Stochastic Models in Business and Industry, 2003, 19(3): 245-268 doi: 10.1002/asmb.501 [82] Huang N E, Shen Z, Long S R, Wu M C, Shih H H, Zheng Q A, et al. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proceedings of the Royal Society of Series A: Mathematical, Physical and Engineering Sciences, 1998, 454(1971): 903-995 doi: 10.1098/rspa.1998.0193 [83] Zhang S M, Zhao C H, Wang S, Wang F L. Pseudo time-slice construction using a variable moving window k nearest neighbor rule for sequential uneven phase division and batch process monitoring. Industry & Engineering Chemistry Research, 2017, 56(3): 728-740 [84] Yu W K, Zhao C H. Recursive exponential slow feature analysis for fine-scale adaptive processes monitoring with comprehensive operation status identification. IEEE Transactions on Industrial Informatics, 2019, 15(6): 3311-3323 doi: 10.1109/TII.2018.2878405 [85] Zhao C H, Wang F L, Gao F R, Zhang Y W. Enhanced process comprehension and statistical analysis for slow-varying batch processes. Industry & Engineering Chemistry Research, 2008, 47(24): 9996-10008 [86] Box G E P, Jenkins G M, Reinsel G C. Time Series Analysis: Forecasting and Control (3rd edition). Englewood Cliffs: Prentice-Hall, 1994. [87] Del Castillo E. Statistical Process Adjustment for Quality Control. New York: John Wiley & Sons, 2002. [88] Berthouex P M, Box G E. Time series models for forecasting wastewater treatment plant performance. Water Research, 1996, 30(8): 1865-1875 doi: 10.1016/0043-1354(96)00063-2 [89] Granger C W J. Some properties of time series data and their use in econometric model specification. Journal of Econometrics, 1981, 16(1): 121-130 doi: 10.1016/0304-4076(81)90079-8 [90] Engle R F, Granger C W J. Co-integration and error correction: Representation, estimation, and testing. Econometrica, 1987, 55(2): 251-276 doi: 10.2307/1913236 [91] Chen Q, Kruger U, Leung A Y T. Cointegration testing method for monitoring nonstationary processes. Industrial & Engineering Chemistry Research, 2009, 48: 3533-3543 [92] Li G, Qin S J, Yuan T. Nonstationarity and cointegration tests for fault detection of dynamic processes. IFAC Proceedings Volumes, 2014, 47(3): 10616-10621 doi: 10.3182/20140824-6-ZA-1003.00754 [93] Sharma V. A review on vibration-based fault diagnosis techniques for wind turbine gearboxes operating under nonstationary conditions. Journal of The Institution of Engineers (India): Series C, 2021, 102(2): 507-523 doi: 10.1007/s40032-021-00666-y [94] Lin Y L, Kruger U, Chen Q. Monitoring nonstationary dynamic systems using cointegration and common-trends analysis. Industrial & Engineering Chemistry Research, 2017, 56(31): 8895-8905 [95] Zhong K, Sun X F, Han M. Bayesian inference based reorganized multiple characteristics subspaces fusion strategy for dynamic process monitoring. Control Engineering Practice, 2021, 112: Article No. 104816 doi: 10.1016/j.conengprac.2021.104816 [96] Zhao C H, Huang B. A full-condition monitoring method for nonstationary dynamic chemical processes with cointegration and slow feature analysis. AIChE Journal, 2018, 64(5): 1662-1681 doi: 10.1002/aic.16048 [97] Zhao C H, Huang B. Incipient fault detection for complex industrial processes with stationary and nonstationary hybrid characteristics. Industrial & Engineering Chemistry Research, 2018, 57(14): 5045-5057 [98] Zhang S M, Zhao C H. Stationarity test and Bayesian monitoring strategy for fault detection in nonlinear multimode processes. Chemometrics and Intelligent Laboratory Systems, 2017, 168: 45-61 doi: 10.1016/j.chemolab.2017.07.010 [99] Zhao C H, Sun H, Tian F. Total variable decomposition based on sparse cointegration analysis for distributed monitoring of nonstationary industrial processes. IEEE Transactions on Control Systems Technology, 2020, 28(4): 1542-1549 doi: 10.1109/TCST.2019.2908339 [100] Yu W K, Zhao C H, Huang B. Recursive cointegration analytics for adaptive monitoring of nonstationary industrial processes with both static and dynamic variations. Journal of Process Control, 2020, 92: 319-332 doi: 10.1016/j.jprocont.2020.06.013 [101] Sun H, Zhang S M, Zhao C H, Gao F R. A sparse reconstruction strategy for online fault diagnosis in nonstationary processes with no a priori fault information. Industrial & Engineering Chemistry Research, 2017, 56(24): 6993-7008 [102] Hu Y Y, Zhao C H. Fault diagnosis with dual cointegration analysis of common and specific nonstationary fault variations. IEEE Transactions on Automation Science and Engineering, 2020, 17(1): 237-247 doi: 10.1109/TASE.2019.2917580 [103] Zhao C H, Wang W, Tian C, Sun Y X. Fine-scale modeling and monitoring of wide-range nonstationary batch processes with dynamic analytics. IEEE Transactions on Industrial Electronics, 2021, 68(9): 8808-8818 doi: 10.1109/TIE.2020.3009564 [104] Kelly J D, Hedengren J D. A steady-state detection (SSD) algorithm to detect non-stationary drifts in processes. Journal of Process Control, 2013, 23(3): 326-331 doi: 10.1016/j.jprocont.2012.12.001 [105] Dorr R, Kratz F, Ragot J, Loisy F, Germain J L. Detection, isolation, and identification of sensor faults in nuclear power plants. IEEE Transactions on Control Systems Technology, 1997, 5(1): 42-60 doi: 10.1109/87.553664 [106] Zhao C H. A quality-relevant sequential phase partition approach for regression modeling and quality prediction analysis in manufacturing processes. IEEE Transactions on Automation Science and Engineering, 2014, 11(4): 983-991 doi: 10.1109/TASE.2013.2287347 [107] Zhao C H, Sun Y X. Step-wise sequential phase partition (SSPP) algorithm based statistical modeling and online process monitoring. Chemometrics and Intelligent Laboratory Systems, 2013, 125: 109-120 doi: 10.1016/j.chemolab.2013.03.017 [108] 孙贤昌, 田学民, 张妮. 一种基于GMM的多工况过程故障诊断方法. 计算机与应用化学, 2014, 31(1): 33-39Sun Xian-Chang, Tian Xue-Min, Zhang Ni. Multi-mode process fault diagnosis method based on GMM. Computers and Applied Chemistry, 2014, 31(1): 33-39 [109] Zhao C H, Wang F L, Lu N Y, Jia M X. Stage-based soft-transition multiple PCA modeling and on-line monitoring strategy for batch processes. Journal of Process Control, 2007, 17(9): 728-741 doi: 10.1016/j.jprocont.2007.02.005 [110] Yao Y, Gao F R. Phase and transition based batch process modeling and online monitoring. Journal of Process Control, 2009, 19(5): 816-826 doi: 10.1016/j.jprocont.2008.11.001 [111] Wang F L, Tan S, Peng J, Chang Y Q. Process monitoring based on mode identification for multi-mode process with transitions. Chemometrics and Intelligent Laboratory Systems, 2012, 110(1): 144-155 doi: 10.1016/j.chemolab.2011.10.013 [112] Wang F L, Tan S, Shi H B. Hidden markov model-based approach for multimode process monitoring. Chemometrics and Intelligent Laboratory Systems, 2015, 148: 51-59 doi: 10.1016/j.chemolab.2015.08.025 [113] 沙万里, 陈军豪, 赵春晖. 基于负荷轴工况划分的发电厂关键设备非平稳状态监测. 浙江电力, 2019, 38(12): 31-38Sha Wan-Li, Chen Jun-Hao, Zhao Chun-Hui. Nonstationary operation condition monitoring for key machines of power plant based on load axis operating condition division. Zhejiang Electric Power, 2019, 38(12): 31-38 [114] Zhao C H, Chen J H, Jing H. Condition-driven data analytics and monitoring for wide-range nonstationary and transient continuous processes, IEEE Transactions on Automation Science and Engineering, 2021, 18(4): 1563-1574 doi: 10.1109/TASE.2020.3010536 [115] Li W Q, Zhao C H, Gao F R. Linearity evaluation and variable subset partition based hierarchical process modeling and monitoring. IEEE Transactions on Industrial Electronics, 2018, 65(3): 2683-2692 doi: 10.1109/TIE.2017.2745452 [116] Qin S J, McAvoy T J. Nonlinear PLS modeling using neural networks. Computers & Chemical Engineering, 1992, 16(4): 379-391 [117] Kramer M A. Nonlinear principal component analysis using autoassociative neural networks. AIChE Journal, 1991, 37(2): 233-243 doi: 10.1002/aic.690370209 [118] Tan S F, Mayrovouniotis M L. Reducing data dimensionality through optimizing neural network inputs. AIChE Journal, 1995, 41(6): 1471-1480 doi: 10.1002/aic.690410612 [119] Dong D, McAvoy T J. Nonlinear principal component analysis-based on principal curves and neural networks. Computers & Chemical Engineering, 1996, 20(1): 65-78 [120] Wu P, Ferrari R M G, Liu Y C, van Wingerden J W. Data-driven incipient fault detection via canonical variate dissimilarity and mixed kernel principal component analysis. IEEE Transactions on Industrial Informatics, 2021, 17(8): 5380-5390 doi: 10.1109/TII.2020.3029900 [121] Si Y B, Wang Y Q, Zhou D H. Key-performance-indicator-related process monitoring based on improved kernel partial least squares. IEEE Transactions on Industrial Electronics, 2021, 68(3): 2626-2636 doi: 10.1109/TIE.2020.2972472 [122] Cai L F, Tian X M, Chen S. Monitoring nonlinear and non-Gaussian processes using Gaussian mixture model-based weighted kernel independent component analysis. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(1): 122-135 doi: 10.1109/TNNLS.2015.2505086 [123] Ma M, Sun C, Chen X F. Deep coupling autoencoder for fault diagnosis with multimodal sensory data. IEEE Transactions on Industrial Informatics, 2018, 14(3): 1137-1145 doi: 10.1109/TII.2018.2793246 [124] Zhang Z H, Jiang T, Li S H, Yang Y. Automated feature learning for nonlinear process monitoring-an approach using stacked denoising autoencoder and k-nearest neighbor rule. Journal of Process Control, 2018, 64: 49-61 doi: 10.1016/j.jprocont.2018.02.004 [125] Kruger U, Antory D, Hahn J, Irwin G W, McCullough G. Introduction of a nonlinearity measure for principal component models. Computers & Chemical Engineering, 2005, 29(11-12): 2355-2362 [126] Zhang S M, Wang F L, Zhao L P, Wang S, Chang Y Q. A novel strategy of the data characteristics test for selecting a process monitoring method automatically. Industrial & Engineering Chemistry Research, 2016, 55(6): 1642-1654 [127] MacGregor J F, Jaeckle C, Kiparissides C, Koutoudi M. Process monitoring and diagnosis by multiblock PLS methods. AIChE Journal, 1994, 40(5): 826-838 doi: 10.1002/aic.690400509 [128] Westerhuis J A, Kourti T, MacGregor J F. Analysis of multiblock and hierarchical PCA and PLS models. Journal of Chemometrics, 1998, 12(5): 301-321 doi: 10.1002/(SICI)1099-128X(199809/10)12:5<301::AID-CEM515>3.0.CO;2-S [129] Qin S J, Valle S, Piovoso M J. On unifying multiblock analysis with application to decentralized process monitoring. Journal of Chemometrics, 2001, 15(9): 715-742 doi: 10.1002/cem.667 [130] Tong C D, Yan X F. A novel decentralized process monitoring scheme using a modified multiblock PCA algorithm. IEEE Transactions on Automation Science and Engineering, 2017, 14(2): 1129-1138 doi: 10.1109/TASE.2015.2493564 [131] Li W Q, Zhao C H, Huang B. Distributed dynamic modeling and monitoring for large-scale industrial processes under closed-loop control. Industrial & Engineering Chemistry Research, 2018, 57(46): 15759-15772 [132] Li W Q, Zhao C H. Hybrid fault characteristics decomposition based probabilistic distributed fault diagnosis for large-scale industrial processes. Control Engineering Practice, 2019, 84: 377-388 doi: 10.1016/j.conengprac.2018.12.009 [133] Ku W F, Storer R H, Georgakis C. Disturbance detection and isolation by dynamic principal component analysis. Chemometrics and Intelligent Laboratory Systems, 1995, 30(1): 179-196 doi: 10.1016/0169-7439(95)00076-3 [134] Chen J, Liu K C. On-line batch process monitoring using dynamic PCA and dynamic PLS models. Chemical Engineering Science, 2002, 57(1): 63-75 doi: 10.1016/S0009-2509(01)00366-9 [135] Li G, Qin S J, Zhou D H. A new method of dynamic latent-variable modeling for process monitoring. IEEE Transactions on Industrial Electronics, 2014, 61(11): 6438-6445 doi: 10.1109/TIE.2014.2301761 [136] Dong Y N, Qin S J. Dynamic-inner partial least squares for dynamic data modeling. IFAC-PapersOnLine, 2015, 48(8): 117-122 doi: 10.1016/j.ifacol.2015.08.167 [137] Negiz A, Çlinar A. Statistical monitoring of multivariable dynamic processes with state-space models. AIChE Journal, 1997, 43(8): 2002-2020 doi: 10.1002/aic.690430810 [138] Pilario K E S, Cao Y, Shafiee M. Mixed kernel canonical variate dissimilarity analysis for incipient fault monitoring in nonlinear dynamic processes. Computers & Chemical Engineering, 2019, 123: 143-154 [139] Wiskott L, Sejnowski T J. Slow feature analysis: Unsupervised learning of invariances. Neural Computation, 2002, 14(4): 715-770 doi: 10.1162/089976602317318938 [140] Zheng J L, Zhao C H. Enhanced canonical variate analysis with slow feature for dynamic process status analytics. Journal of Process Control, 2020, 95: 10-31 doi: 10.1016/j.jprocont.2020.09.005 [141] Shang C, Yang F, Gao X L, Suykens J A K, Huang D X. Concurrent monitoring of operating condition deviations and process dynamics anomalies with slow feature analysis. AIChE Journal, 2015, 61(11): 3666-3682 doi: 10.1002/aic.14888 [142] Liang P F, Deng C, Wu J, Yang Z X. Intelligent fault diagnosis of rotating machinery via wavelet transform, generative adversarial nets and convolutional neural network. Measurement, 2020, 159: Article No. 107768 doi: 10.1016/j.measurement.2020.107768 [143] Daubechies I. The wavelet transform, time-frequency localization and signal analysis. IEEE Transactions on Information Theory, 1990, 36(5): 961-1005 doi: 10.1109/18.57199 [144] Lei Y G, Lin J, He Z J, Zi Y Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mechanical Systems and Signal Processing, 2011, 25(5): 1738-1749 doi: 10.1016/j.ymssp.2010.12.011 [145] Lei Y G, Lin J, He Z J, Zuo M J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mechanical Systems and Signal Processing, 2013, 35(1-2): 108-126 doi: 10.1016/j.ymssp.2012.09.015 [146] Yang Y, Yu D J, Cheng J S. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurement, 2007, 40(9-10): 943-950 doi: 10.1016/j.measurement.2006.10.010 [147] 田峰. 基于高频振动信号与机器学习的旋转机械智能故障诊断 [硕士学位论文], 浙江大学, 中国, 2020.Tian Feng. Intelligent Fault Diagnosis of Rotating Machinery Based on Vibration Signal and Machine Learning [Master thesis], Zhejiang University, China, 2020. [148] Lei Y G, He Z J, Zi Y Y. EEMD method and WNN for fault diagnosis of locomotive roller bearings. Expert Systems with Applications, 2011, 38(6): 7334-7341 doi: 10.1016/j.eswa.2010.12.095 [149] Sun W X, Chen J, Li J Q. Decision tree and PCA-based fault diagnosis of rotating machinery. Mechanical Systems and Signal Processing, 2007, 21(3): 1300-1317 doi: 10.1016/j.ymssp.2006.06.010 [150] Zhang B, Sconyers C, Byington C, Patrick R, Orchard M E, Vachtsevanos G. A probabilistic fault detection approach: Application to bearing fault detection. IEEE Transactions on Industrial Electronics, 2010, 58(5): 2011-2018 [151] Staniek M, Lehnertz K. Symbolic transfer entropy. Physical Review Letters, 2008, 100(15): Article No. 158101 doi: 10.1103/PhysRevLett.100.158101 [152] Papana A, Kyrtsou C, Kugiumtzis D, Diks C. Detecting causality in non-stationary time series using partial symbolic transfer entropy: Evidence in financial data. Computational Economics, 2016, 47(3): 341-365 doi: 10.1007/s10614-015-9491-x [153] Kugiumtzis D. Partial transfer entropy on rank vectors. The European Physical Journal Special Topics, 2013, 222(2): 401-420 doi: 10.1140/epjst/e2013-01849-4 [154] Chicharro D, Andrzejak R G. Reliable detection of directional couplings using rank statistics. Physical Review E, 2009, 80(2): Article No. 026217 [155] Schäck T, Muma M, Feng M L, Guan C T, Zoubir A M. Robust nonlinear causality analysis of nonstationary multivariate physiological time series. IEEE Transactions on Biomedical Engineering, 2018, 65(6): 1213-1225 doi: 10.1109/TBME.2017.2708609 [156] Agrawal V, Panigrahi B K, Subbarao P M V. Intelligent decision support system for detection and root cause analysis of faults in coal mills. IEEE Transactions on Fuzzy Systems, 2017, 25(4): 934-944 doi: 10.1109/TFUZZ.2016.2587325 [157] 刘鑫. 面向故障分析的知识图谱构建技术研究 [硕士学位论文], 北京邮电大学, 中国, 2019.Liu Xin. Research on Knowledge Graph Construction Technology for Fault Analysis [Master thesis], Beijing University of Posts and Telecommunications, China, 2019. [158] Yang N, Zhang G G, Wang J. Research on knowledge graph and bayesian network in fault diagnosis of steam turbine. In: Proceedings of the 2020 Global Reliability and Prognostics and Health Management (PHM-Shanghai). Shanghai, China: IEEE, 2020. 1−6 [159] Zhang K L, Huang W, Hou X Y, Xu J H, Su R D, Xu H Y. A fault diagnosis and visualization method for high-speed train based on edge and cloud collaboration. Applied Sciences, 2021, 11(3): Article No. 1251 doi: 10.3390/app11031251 [160] Liu Y, Wang F L, Chang Y Q. Online fuzzy assessment of operating performance and cause identification of nonoptimal grades for industrial processes. Industrial & Engineering Chemistry Research, 2013, 52(50): 18022-18030 [161] Zou X Y, Zhao C H. Meticulous assessment of operating performance for processes with a hybrid of stationary and nonstationary variables. Industrial & Engineering Chemistry Research, 2019, 58(3): 1341-1351 [162] Zou X Y, Zhao C H. Concurrent assessment of process operating performance with joint static and dynamic analysis. IEEE Transactions on Industrial Informatics, 2019, 16(4): 2776-2786 [163] Lu W N, Liang B, Cheng Y, Meng D S, Yang J, Zhang T. Deep model based domain adaptation for fault diagnosis. IEEE Transactions on Industrial Electronics, 2017, 64(3): 2296-2305 doi: 10.1109/TIE.2016.2627020 [164] Wen L, Gao L, Li X Y. A new deep transfer learning based on sparse auto-encoder for fault diagnosis. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(1): 136-144 doi: 10.1109/TSMC.2017.2754287 [165] Chai Z, Zhao C H. A fine-grained adversarial network method for cross-domain industrial fault diagnosis. IEEE Transactions on Automation Science and Engineering, 2020, 17(3): 1432-1442 doi: 10.1109/TASE.2019.2957232 [166] Chai Z, Zhao C H. Multiclass oblique random forests with dual-incremental learning capacity. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(12): 5192-5203 doi: 10.1109/TNNLS.2020.2964737 [167] Feng L J, Zhao C H. Fault description based attribute transfer for zero-sample industrial fault diagnosis. IEEE Transactions on Industrial Informatics, 2021, 17(3): 1852-1862 doi: 10.1109/TII.2020.2988208 -

 下载:
下载:

计量
- 文章访问数: 2916
- HTML全文浏览量: 1070
- PDF下载量: 753
- 被引次数: 0
