

The Control Strategy of Vertical Torsional Coupling Vibration of Rolling Mill Based on Coupled Backstepping Method
-
摘要: 针对轧机机电液垂扭耦合系统存在耦合振动问题, 提出一种基于耦合反步法的轧机垂扭耦合振动抑制控制策略. 首先考虑轧机传动系统、液压系统与辊系机械间的相互影响, 根据动力学定理, 建立轧机机电液垂扭耦合振动数学模型. 其次考虑到轧机耦合垂振系统和耦合扭振系统间存在状态耦合关系, 利用耦合反步法, 解决了振动控制器设计中存在的相互嵌套问题. 针对耦合系统输出性能受限问题, 借助于障碍李雅普诺夫函数方法, 同时利用神经网络来逼近未知非线性函数, 设计自适应神经网络振动抑制控制策略. 基于李雅普诺夫稳定理论严格证明了本文设计的控制方法能够保证系统输出满足所要求的暂稳态性能指标. 最后, 根据650 mm轧机的实际数据进行仿真, 验证了本文设计控制策略的有效性与优越性.Abstract: A control strategy based on coupling backstepping method is proposed to suppress the vertical torsional coupling vibration of rolling mill. Firstly, the coupling effect of the drive system, hydraulic system and the roll system is considered. According to the dynamic theorem, the vertical torsional coupling vibration model of the rolling mill is established. Then, in view of the coupling relationship between the two subsystems, a control strategy of electromechanical hydraulic vertical torsional coupling vibration suppression of rolling mill is proposed. Based on the specific order backstepping method, the coupling vibration control strategy is designed to overcome the problem of nesting each other in the controller design. Considering the output performance constraints of the coupled system, with the aid of the barrier Lyapunov function method and the neural network to approximate the unknown nonlinear function, an adaptive neural network vibration suppression control strategy is designed. It is proved theoretically that the designed controller can make the system output meet the required transient-steady performance index. Finally, a simulation is carried out on 650 mm rolling mill by using the actual data to show the validity of the proposed control strategy in this paper.
-
板带高速轧制过程常常由于轧制条件的变化而诱发轧机出现振动问题. 轧机振动不仅制约生产效率而且影响产品质量, 严重时还会引起重大现场事故[1-4]. 目前对于轧机振动形式的分类主要为主传动系统扭振、轧机辊系垂振和工作辊水平振动. 然而, 轧机作为一个复杂多质量体转动系统, 往往存在着轧制工艺过程参数与系统机构或者机−电−液界面多态之间的相互作用, 从而引发板带在轧制过程出现不同形式的耦合振动.
由于轧机耦合振动形式的多样性及其机理的复杂性, 轧机耦合振动问题吸引了国内外学者的关注[5-7]. 轧机耦合振动建模是振动控制的前提和基础, 文献[8-10]研究了不同轧机振动模态之间的耦合, 分别建立了轧机耦合振动模型; 文献[11]考虑了连轧机轧制过程张力和厚度波动, 建立了存在时滞下的垂直、水平和扭转方向耦合的再生颤振模型; 文献[12]考虑了运动板带与轧机多模态振动下的耦合, 建立了轧机系统耦合振动机理模型; 文献[13-14]研究了轧机机电耦合机理, 分别建立了轧机机电耦合动力学方程; 文献[15]分析了轧机液压系统和轧机辊系之间的耦合关系, 建立了轧机机液耦合模型. 然而, 轧机系统是由多个不同子系统组合而成的, 并且不同子系统之间存在相互耦合关系. 考虑轧机传动系统、液压系统和轧机辊系机械之间的作用关系, 建立轧机机电液垂扭耦合振动模型是十分必要的.
对于轧机振动的治理以往主要是从机械、工艺和电气的角度出发对其进行研究. 在机械方面, 由于设备磨损或者装配等问题造成的振动, 可以采取更换设备、安装防振垫片等措施来治理振动[16]. 对于非机械原因造成的振动, 通过调整乳化液粘度和流量、增加抑振辊、优化轧制规程等工艺措施来抑制振动[17-18]. 在电气方面, 通过避免主电机电磁力矩的振动频率与机械传动部分的自振频率的重合来消除振动[19]. 随着控制理论的发展, 先进控制算法逐渐应用到高层建筑、磁浮列车、机器人以及板带轧制[20-22]等行业中的振动抑制控制之中. 在轧机扭振抑制方面, 文献[23]提出了一种基于扩张状态观测器(Extended state observer, ESO)和线性二次型(Linear quadratic, LQ)的速度控制器, 并将其应用于轧机主传动系统的扭振控制, 文献[24]采用H∞扭振抑制控制器, 来抑制热连轧机组的轧机扭振问题. 文献[25]针对传感器测量存在摄动的问题, 将反步法和动态面技术相结合, 提出了性能受限下的轧机主传动系统自适应扭振控制策略. 在辊系垂振抑制方面, 文献[26]利用扰动估计与补偿算法, 设计了基于扩张状态观测器的主动式振动抑制器, 提出了新的振动主动抑制方法. 文献[27]针对金属板带厚度控制模型, 设计了基于定量反馈理论的鲁棒控制器来抑制轧机振动给板带厚度带来的影响, 并将设计的控制器与比例积分微分(Proportional-integral-derivative, PID)控制器进行比较, 表明该控制器对参数不确定性和外部干扰具有较好的抑制性能. 上述文献分别针对轧机扭振和垂振提出了不同的振动抑制控制策略, 然而并没有考虑轧机不同振动形式间存在的相互耦合关系, 进而对轧机耦合振动系统进行振动抑制控制研究.
随着工业领域对系统控制性能要求的不断提升, 使得性能约束控制成为研究的热点. 性能约束控制[28-30]是通过选取合适的约束函数来限制系统的稳态误差、最大超调量和收敛速度等性能指标, 进而保证系统的暂稳态约束性能, 广泛应用于不同的非线性系统中. 文献[31]针对存在未知海洋干扰的船舶系统, 提出一种基于时变非对称障碍李雅普诺夫函数的最小参数自适应递归滑模控制策略; 文献[32]考虑了具有非对称时变输出约束的不确定切换随机非线性系统, 设计了自适应模糊容错受限控制器; 文献[33]研究了非线性多输入多输出系统的跟踪问题, 利用状态观测器和障碍李雅普诺夫函数, 设计了自适应输出反馈控制策略. 由于机械设计以及设备安全因素, 轧制设备的轧辊振动位移和轧辊转速等系统参数需要满足不同的受限要求, 如果设计控制算法时不考虑这些因素, 可能会降低系统的性能, 甚至导致系统不稳定.
本文考虑垂振系统中非线性轧制力、扭振系统中非线性阻尼以及轧机垂振系统和扭振系统存在的未知耦合关系, 建立了机电液垂扭耦合振动模型. 基于特定顺序的反步法, 提出适用于轧机机电液垂扭耦合系统的振动控制策略, 避免了控制器循环嵌套问题. 针对轧机耦合垂振系统和耦合扭振系统输出性能受限, 考虑到输出变量需要满足暂稳态性能受限要求, 设计了基于神经网络的预定性能控制器, 并通过仿真验证算法的有效性.
1. 轧机垂扭耦合系统的建立
轧机辊系和主传动系统示意图如图1所示, 包括电机、减速器、连接轴、机架、轧辊和液压缸部分. 为了便于后续对轧机辊系和主传动系统建模, 提出以下假设: 1) 轧机以板带为中心线上下对称, 即轧机上辊系统和下辊系统是对称的; 2) 液压缸的振动位移忽略不计, 只考虑轧机垂直方向的轧辊振动.
根据集中质量法可以将辊系和传动系统简化成如图2所示的弹簧质量系统. 图2中, ${A_1}$为液压缸活塞面积; ${A_2}$为液压缸有杆腔的有效工作面积; ${x_v}$为阀芯位移; ${P_1}$为液压缸无杆腔的工作压力; ${P_2}$为液压缸有杆腔工作压力; ${P_s}$为液压缸供油压力; ${P_t}$为液压缸回油压力; ${m_1}$为工作辊及轴承座等效质量.
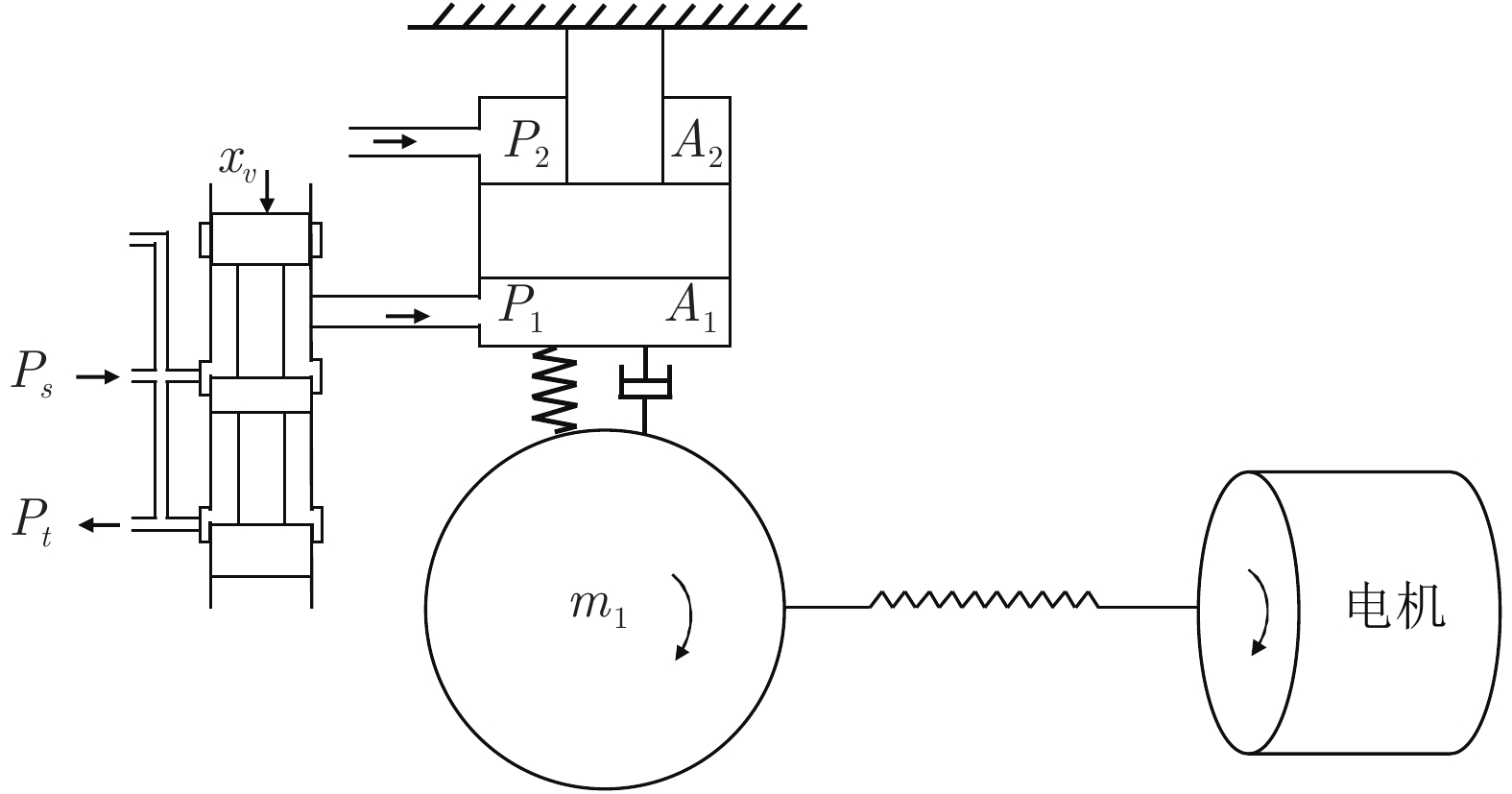 图 2 轧机机电液垂扭耦合动力学模型图Fig. 2 Dynamic model of vertical torsional coupling of rolling mill
图 2 轧机机电液垂扭耦合动力学模型图Fig. 2 Dynamic model of vertical torsional coupling of rolling mill1.1 轧机垂振模型的建立
根据牛顿第二定律, 轧机辊系动力学方程可以表示为
$${m_1}{\ddot x_1} = {F_z}({x_1},{\dot x_1}) - {k_{11}}{x_1} - {c_{11}}{\dot x_1} + {P_2}{A_2} - {P_1}{A_1}$$ (1) 式中, ${k_{11}}$为工作辊与液压缸之间的等效刚度; ${c_{11}}$为工作辊与液压缸之间的等效阻尼; ${F_z}({x_1},{\dot x_1})$表示为非线性轧制力, ${x_1}$表示为垂振系统被控变量轧辊振动位移, ${\dot x_1}$表示为轧辊振动速度.
根据文献[34], 轧机液压缸流量连续方程为
$${Q_L} = {A_1}{\dot x_{1}} + {C_t}\left( {{P_1} - {P_2}} \right) + \frac{V}{{{\beta _e}}}{\dot P_1}$$ (2) 式中, ${C_t}$为液压缸内泄露系数, $V$为液压缸控制腔初始体积, ${\beta _e}$为液压油的体积模量.
液压伺服阀基本流量方程[26]可以表示为
$${Q_L} = \left\{ {\begin{aligned} &{{C_d}w{x_v}\sqrt {\frac{{2\left( {{P_s} - {P_1}} \right)}}{\rho }} ,\;\;{x_v} \geq 0} \\ &{{C_d}w{x_v}\sqrt {\frac{{2\left( {{P_1} - {P_t}} \right)}}{\rho }} ,\;\;{x_v} < 0} \end{aligned}} \right.$$ (3) 式中, ${C_d}$为阀口流量系数, $w$为阀口面积梯度, $\rho $为液压油密度.
液压缸伺服阀阀芯位移${x_v}$和垂振系统控制变量输入电压$u{\rm{ }}$之间的关系可以近似看成比例关系, 表示为
$${x_v} = {k_v}u{\rm{ }}$$ (4) 式中, $k_v $为增益系数. 根据式(2)和式(3), 可得
$${k_q}u = {A_1}{\dot x_1} + {C_t}\left( {{P_1} - {P_2}} \right) + \frac{V}{{{\beta _e}}}\dot P$$ (5) 式中, ${k_q} = \left\{ {\begin{aligned} {{C_d}w{k_v}\sqrt {\frac{{2\left( {{P_s} - {P_1}} \right)}}{\rho }} {\rm{ }},\;\;{x_v} \geq 0} \\ {{C_d}w{k_v}\sqrt {\frac{{2\left( {{P_1} - {P_t}} \right)}}{\rho }} {\rm{ }},\;\;{x_v} < 0} \end{aligned}} \right.$
根据伺服阀流量特性可知, ${k_q}$满足$0 < {{\underline k } _q} \leq {k_q} \leq {\bar k_q}$, 其中${{\underline k } _q},{\bar k_q}$是未知的正数.
因此, 轧机垂振模型如式(6)所示:
$$\left\{ \begin{aligned} &{m_1}{{\ddot x}_1} = {F_z}({x_1},{{\dot x}_1}) - {k_{11}}{x_1} - {c_{11}}{{\dot x}_1} + {P_2}{A_2} - {P_1}{A_1} \\ &{k_q}u = {A_1}{{\dot x}_1} + {C_t}\left( {{P_1} - {P_2}} \right) + \frac{V}{{{\beta _e}}}\dot P \end{aligned} \right.$$ (6) 1.2 轧机垂振模型的建立
根据文献[27], 轧机主传动系统的动态方程可以表示为
$$\left\{ \begin{aligned} &{J_m}{{\ddot \theta }_m} + {C_m}{{\dot \theta }_m} + K\left( {{\theta _m} - {\theta _L}} \right) = {T_m} \\ &{J_L}{{\ddot \theta }_L} + {C_L}{{\dot \theta }_L} + K\left( {{\theta _L} - {\theta _m}} \right) = {T_L} + {T_f} \end{aligned} \right.$$ (7) 式中, ${T_m}$为扭振系统控制变量电机转矩, ${T_L}$为负载转矩, ${T_f}$为摩擦转矩, ${J_m},{J_L}$分别表示电机和负载的转动惯量, ${C_m},{C_L}$分别为电机和负载的阻尼系数, ${\theta _m}$为电机转动角度, ${\theta _L}$为轧辊转动角度, $K$为连接轴的刚度系数, ${\dot \theta _L}$为扭振系统被控变量轧辊角速度, ${\dot \theta _m}$为电机转动角速度, ${\ddot \theta _L}$为轧辊角加速度, ${\ddot \theta _m}$为电机转动角加速度.
轧机主传动系统摩擦力矩为
$${T_f} = \mu {F_z}R{\rm{ }}$$ (8) 式中, 摩擦系数$\mu = a{{\rm{e}}^{ - b{v_L} + c}}{\rm{ }}$, $a,b,c$为与乳化液浓度、流量、温度相关的参数; ${v_L}$为轧辊旋转线速度, $R$为工作辊半径.
将摩擦系数代入式(7), 可得
$$\left\{ \begin{aligned} &{J_m}{{\ddot \theta }_m} + {C_m}{{\dot \theta }_m} + K\left( {{\theta _m} - {\theta _L}} \right) = {T_m} \\ & {J_L}{{\ddot \theta }_L} + {C_L}{{\dot \theta }_L} + K\left( {{\theta _L} - {\theta _m}} \right) =\\ &\qquad\quad\;\;{T_L} + aR{F_z}{{\rm{e}}^{ - b{{\dot \theta }_L}R + c}} \end{aligned} \right.$$ (9) 式(10)描述了轧机主驱动系统电机和负载处的非线性阻尼
$$\left\{ \begin{aligned} &{{C_m}}\;{ = - {c_1} + {c_2}\dot \theta _m^2{\rm{ }}} \\ &{{C_L}}\;{ = - {c_3} + {c_4}\dot \theta _L^2} \end{aligned}\right.$$ (10) 那么, 式(9)可以进一步表示为
$$\left\{ \begin{aligned} &{J_m}{{\ddot \theta }_m} - {c_1}{{\dot \theta }_m} + {c_2}\dot \theta _m^3 + K\left( {{\theta _m} - {\theta _L}} \right) = {T_m} \\ &{J_L}{{\ddot \theta }_L} - {c_3}{{\dot \theta }_L} + {c_4}\dot \theta _L^3 + K\left( {{\theta _L} - {\theta _m}} \right) =\\ &\qquad\quad\;\;{T_L} + aR{F_z}{{\rm{e}}^{ - b{{\dot \theta } _L}R + c}} \end{aligned} \right.$$ (11) 式中, ${c_i}\;(i = 1,2,3,4)$为阻尼系数.
1.3 轧机垂扭耦合系统的建立
本节将建立轧机垂扭耦合系统模型. 首先选取${z_{11}} = {x_1}$, ${z_{{12}}} = {\dot x_1}$, ${z_{13}} = {P_1}$, ${z_{21}} = {\dot \theta _L}$, ${z_{22}} = {\theta _m} - {\theta _L}$, ${z_{23}} = {\dot \theta _m}$, 同时考虑垂振子系统和扭振子系统间未知相互耦合影响, 根据式(6)和式(11)可以获得耦合垂振系统的动态方程为
$$\left\{ \begin{aligned} {{\dot z}_{11}} =\;& {z_{12}} + {f_{11}}\left( {{z_{21}}} \right) \\ {{\dot z}_{12}} = \;&( {F_z}\left( {{z_{11}},{z_{12}}} \right) - {k_{11}}{z_{11}} - {c_{11}}{z_{12}} \,+\\ &{P_2}{A_2} - {z_{13}}{A_1} )/{m_1} \\ {{\dot z}_{13}} = \;&{\beta _e}\left( {{k_q}u - {A_1}{z_{12}} - {C_t}\left( {{z_{{13}}} - {P_2}} \right)} \right)/V \end{aligned} \right.$$ (12) 耦合轧机扭振系统的动态方程为
$$\left\{ {\begin{aligned} {{\dot z}_{21}} =\;& \frac{K}{{{J_L}}}{z_{22}} + \frac{{{T_L}}}{{{J_L}}} + \frac{{aR{F_z}{e^{ -b{{\dot \theta } _L}R + c}}}}{{{J_L}}}\, +\\ & \frac{{{c_3}{z_{21}} - {c_4}z_{21}^3}}{{{J_L}}} + {f_{21}}\left( {{z_{11}}} \right) \\ {{\dot z}_{22}} =\;& {z_{23}} - {z_{21}} \\ {{\dot z}_{23}} = \;&\frac{{{T_m}}}{{{J_m}}} + \frac{{{c_1}}}{{{J_m}}}{z_{23}} - \frac{{{c_2}}}{{{J_m}}}z_{23}^3 - \frac{K}{{{J_m}}}{z_{22}} \end{aligned}} \right.$$ (13) 式中, ${f_{11}}\left( {{z_{21}}} \right)$为垂振对扭振的未知耦合项, ${f_{21}}\left( {{z_{11}}} \right)$为扭振对垂振的未知耦合项.
2. 轧机垂扭耦合控制策略
本节基于建立的耦合垂振系统模型(12)和耦合扭振系统模型(13), 考虑输出受限情况, 提出轧机垂扭耦合振动抑制控制策略. 根据建立的轧机垂扭耦合模型, 利用反步法分别对耦合垂振系统和耦合扭振系统设计相应的振动控制器.
为了便于控制器设计, 首先给出引理1和引理2.
引理 1[35]. 对于任意的常数$ \epsilon >0$和任意的变量$z$, 满足
$$ 0\le \left|z\right|-\frac{{z}^{2}}{\sqrt{{z}^{2}+{\epsilon}^{2}}}\le \epsilon$$ 引理 2[36]. 对于任意的常数${\varepsilon _2} > 0$和任意的变量$\nu $, 满足
$$0 \leq \left| \nu \right| - \nu \tanh \left( {\frac{\nu }{{{\varepsilon _2}}}} \right) \leq 0.2785{\varepsilon _2}$$ 2.1 耦合垂振控制设计
首先, 针对轧机耦合垂振系统, 引入下面的坐标变换
$$ {\xi _{11}} = {z_{11}},\; {\xi _{12}} = {z_{12}} - {\alpha _{11}},\; {\xi _{13}} = {z_{13}} - {\alpha _{12}} $$ (14) 式中, $\alpha_{11}$和$\alpha_{12}$为虚拟控制器, 具体形式将在后文给出. 为了限制输出变量${\xi _{11}}$的性能, 构造非对称的正切障碍李雅普诺夫函数, 即
$${\bar V_{11}} = \frac{{{\mu^2 _1}\left( t \right)}}{{\pi {h_{11}}\left( {{\xi _{11}}} \right)}}\tan \left( {\frac{{\pi \xi _{11}^2{h_{11}}\left( {{\xi _{11}}} \right)}}{{2{\mu^2 _1}\left( t \right)}}} \right)$$ (15) 式中,
$${h_{11}}\left( {{\xi _{11}}} \right) = \dfrac{{{b_{11}}\left( {{\xi _{11}}} \right)}}{{\underline \delta _{11}^2}} + \dfrac{{1 - {b_{11}}\left( {{\xi _{11}}} \right)}}{{\bar \delta _{11}^2}}$$ $$ {b_{11}}\left( {{\xi _{11}}} \right) = \left\{ {\begin{aligned} {1,\;\;{\xi _{11}} \geq {{0}}} \\ {0,\;\;{\xi _{11}} < {{0}}} \end{aligned}} \right.\qquad\qquad\;$$ ${\underline \delta _{11}}$和 ${\bar \delta _{11}}$是正实数, ${\mu _1} = {\mu _{10}}{{\rm{e}}^{ - {k_1}t}} + {\mu _{1\infty }}$, ${\mu _{10}}$, ${k_1}$和 ${\mu _{1\infty }}$是给定的正实数.
对${\bar V_{11}}$求导, 可得
$$\begin{split} {\mathop {{{\dot {\bar V}}_{11}}}\limits^{} } =\;& 2\frac{{{{\dot \mu }_1}}}{{{\mu _1}}}{{\bar V}_{11}} - \frac{{{{\dot \mu }_1}}}{{{\mu _1}}}{\xi _{11}}{\nu _{11}} + {\nu _{11}}{{\dot \xi }_{11}} \leq \\ & 2{\gamma _{10}}{{\bar V}_{11}} + {\gamma _{10}}{\xi _{11}}{\nu _{11}} + {\nu _{11}}{{\dot \xi }_{11}} \end{split}$$ (16) 式中,
$$ {\nu _{11}} = \dfrac{{{\xi _{11}}}}{{{{\cos }^2}\left( {\dfrac{{\pi \xi _{11}^2{h_{11}}\left( {{\xi _{11}}} \right)}}{{2\mu _1^2}}} \right)}} $$ $$ {\gamma }_{10}=\sqrt{{\left(\dfrac{{\dot{\mu }}_{1}}{{\mu }_{1}}\right)}^{2}+{\epsilon}_{1}}\qquad\;\;$$ $ {\epsilon}_{1}$是给定的正数.
步骤 1. 构建第1部分的李雅普诺夫函数如下
$${V_{11}} = {\bar V_{11}} + \frac{1}{2}\tilde \Theta _{11}^{\rm{T}}{\rm{ }}\tilde \Theta _{11}^{}{\rm{ }}$$ (17) 式中, ${\tilde \Theta _{ij}} = {\Theta _{ij}} - {\hat \Theta _{ij}}$ $\left( {i = 1,2,j = 1,2,3} \right)$, ${\hat \Theta _{ij}}$是${\Theta _{ij}}$的估计值, ${\Theta _{ij}}$为神经网络未知参量.
将式(16)代入到式(17), 对${V_{11}}$求导, 可得
$$\begin{split} {{\dot V}_{11}} =\;& \frac{{2{{\dot \mu }_1}}}{{{\mu _1}}}{{\bar V}_{11}} - \frac{{{{\dot \mu }_1}}}{{{\mu _1}}}{\xi _{11}}{\nu _{11}} + {\nu _{11}}{{\dot \xi }_{11}} - \tilde \Theta _{11}^{\rm{T}}\dot{ \hat \Theta} _{11}^{} \leq\\ &2{\gamma _{10}}{{\bar V}_{11}} + {\gamma _{10}}{\xi _{11}}{\nu _{11}} + {\nu _{11}}\left( {{z_{{{12}}}}{+ }{f_{11}}\left( {{z_{{{21}}}}} \right)} \right) -\\ &\tilde \Theta _{11}^{\rm{T}}\dot {\hat \Theta} _{11}^{} \\[-10pt] \end{split} $$ (18) 采用径向基函数(Radial basis function, RBF)神经网络来逼近未知的非线性函数, 可得
$${\nu _{11}}{f_{11}}\left( {{z_{{{21}}}}} \right) = {\nu _{11}}\left( {\Theta _{11}^{\rm{T}}{\varphi _{11}}\left( {{Z_{11}}} \right) + {\varepsilon _{11}}\left( {{Z_{11}}} \right)} \right)$$ (19) 式中, ${\varphi _{{{ij}}}}\left( {{Z_{ij}}} \right),\;{i = 1,2,j = 1,2,3}$, 是神经网络基函数, ${\varepsilon _{ij}}\left( {{Z_{ij}}} \right),\; {i = 1,2,j = 1,2,3}$, 表示神经网络估计误差且满足$\left| {{\varepsilon _{ij}}\left( {{Z_{ij}}} \right)} \right| \leq {\bar \varepsilon _{ij}}$, ${\bar \varepsilon _{ij}}$为未知的正常数, ${Z_{11}} = {z_{21}}$.
将式(19)代入式(18)中, 得
$$ \begin{split} {{\dot V}_{11}} \leq\;& 2{\gamma _{10}}{{\bar V}_{11}} + {\gamma _{10}}{\xi _{11}}{\nu _{11}} +{\nu _{11}}\Big[ {\xi _{12}} + {\alpha _{11}}\,+ \\ &\left. \tilde \Theta _{11}^{\rm{T}}{\varphi _{11}}+\hat \Theta _{11}^{\rm{T}}{\varphi _{11}} + {\varepsilon _{11}} \right] - \tilde \Theta _{11}^{\rm{T}}\dot {\hat \Theta} _{11}^{} \\[-5pt] \end{split} $$ (20) 根据杨氏不等式可知
$$\begin{split} &{\nu _{11}}{\xi _{12}} \leq \frac{1}{2}{\nu^2 _{11}} + \frac{1}{2}{\xi ^2_{12}} \\ &{\nu _{11}}{\varepsilon _{11}} \leq \frac{1}{2}{\nu^2 _{11}} + \frac{1}{2}{{\bar \varepsilon }^2_{11}} \end{split} $$ (21) 根据式(20), 设计虚拟控制器和自适应律为
$$\begin{split} {\alpha _{11}} =\;& - \hat \Theta _{11}^{\rm{T}}{\varphi _{11}} - {\nu _{11}} - {\gamma _{10}}{\xi _{11}}\;- \\ & \left( {2{\gamma _{10}} + {\gamma _{11}}} \right)\frac{{{\mu^2 _1}}}{{\pi {\xi _{11}}{h_{11}}}}\sin \left( {\frac{{\pi {\xi^2 _{11}}{h_{11}}}}{{2{\mu^2 _1}}}} \right)\times\\ &\cos \left( {\frac{{\pi {\xi^2 _{11}}{h_{11}}}}{{2{\mu^2 _1}}}} \right) \end{split} $$ (22) $${\dot {\hat \Theta }_{11}} = {\nu _{11}}{\varphi _{11}} - {l_{11}}{\hat \Theta _{11}}\qquad\qquad\qquad\qquad\qquad$$ (23) 式中, ${\gamma _{11}}$, ${l_{11}}$是设计的正数.
将式(21) ~ (23)代入式(20), 可推出
$$ \begin{split} {{\dot V}_{11}} \leq\;& - {\gamma _{11}}{{\bar V}_{11}} + \frac{1}{2}\xi _{12}^2 + \frac{1}{2}\bar \varepsilon _{11}^2 + {\nu _{11}}\tilde \Theta _{11}^{\rm{T}}{\varphi _{11}}\, - \\ &\tilde \Theta _{11}^{\rm{T}}\dot {\hat \Theta} _{11}^{} \leq - {\gamma _{11}}{{\bar V}_{11}} + \frac{1}{2}\xi _{12}^2 + \frac{1}{2}\bar \varepsilon _{11}^2\, -\\ &\frac{{{l_{11}}}}{2}\tilde \Theta _{11}^{\rm{T}}\tilde \Theta _{11}^{} + \frac{{{l_{11}}}}{2}\Theta _{11}^{\rm{T}}\Theta _{11}^{} { \leq - {W_{11}}} {V_{11}}\,+\\ &\frac{1}{2}\xi _{12}^2+{O_{{{11}}}} \end{split} $$ (24) 式中,
$$ {W_{11}} = \min \left\{ {{l_{11}},{\gamma _{11}}} \right\}, {O_{{{11}}}} = \frac{1}{2}\bar \varepsilon _{11}^2 + \frac{{{l_{11}}}}{2}\Theta _{11}^{\rm{T}}\Theta _{11} $$ 步骤 2. 构建第2部分的李雅普诺夫函数, 即
$${V_{1{\rm{2}}}} = {V_{11}} + \frac{{\rm{1}}}{{\rm{2}}}\xi _{{{12}}}^{{2}} + \frac{1}{2}\tilde \Theta _{1{{2}}}^{\rm{T}}{\rm{ }}\tilde \Theta _{1{{2}}}^{} + \frac{1}{{2{\rho _{12}}}}\tilde \rho _{12}^2{\rm{ }}$$ (25) 式中, ${\tilde \rho _{12}} = {\rho _{12}} - {\hat \rho _{12}}$, ${\hat \rho _{12}}$是${\rho _{12}}$的估计值, 将在后文定义.
对${V_{1{{2}}}}$求导, 可得
$$\begin{split} {\dot V_{1{{2}}}} = \;&{\dot V_{11}} + {\xi _{{{12}}}}{\dot \xi _{{{12}}}} - \tilde \Theta _{1{{2}}}^{\rm{T}}\dot {\hat \Theta} _{1{{2}}}^{} - \frac{1}{{{\rho _{12}}}}\tilde \rho _{12}^{}{\dot {\hat \rho} _{12}}=\\ &{{\dot V}_{11}} - \frac{{{\xi _{{\rm{12}}}}{A_1}}}{{{m_1}}}\left( {{\xi _{13}} + {\alpha _{12}}} \right) - {\xi _{{{12}}}}{{\dot \alpha }_{11}} - \tilde \Theta _{1{{2}}}^{\rm{T}}\dot {\hat \Theta} _{1{{2}}}^{} \,+ \\ & \frac{{{\xi _{{{12}}}}\left( {{F_{{z}}} - {k_{11}}{z_{11}} - {c_{11}}{z_{12}} + {P_2}{A_2}} \right)}}{{{m_1}}} - \frac{{\tilde \rho _{12}^{}{{\dot {\hat \rho} }_{12}}}}{{{\rho _{12}}}} \end{split} $$ (26) 根据引理2可知,
$$\begin{split} &{\xi _{12}} \cdot \frac{1}{{{m_1}}}{P_2}{A_2} \leq \left| {{\xi _{12}}} \right|{\rho _{121}} \leq \\ & \qquad\;{\xi _{12}}{\rho _{121}}\tanh \left( {\frac{{{\xi _{12}}}}{{{\varepsilon _{121}}}}} \right) + 0.2785{\varepsilon _{121}}{\rho _{121}} \end{split} $$ (27) 式中, ${\rho _{121}} = \dfrac{1}{{{m_1}}}{P_2}{A_2}$, $ \varepsilon_{121} $为给定的任意正常数.
由杨氏不等式可知,
$$ - \frac{{{A_1}}}{{{m_1}}}{\xi _{12}}{\xi _{13}} \leq \frac{1}{2}\frac{{A_1^2}}{{m_1^2}}\xi _{12}^2 + \frac{1}{2}\xi _{13}^2$$ (28) 利用RBF神经网络来逼近未知的非线性函数
$$\begin{split} & {\xi _{12}}\left( {\frac{1}{2}\frac{{A_1^2}}{{m_1^2}}\xi _{12}^2 + \frac{1}{{{m_1}}}\left( {{F_{{z}}} - {k_{11}}{z_{11}} - {c_{11}}{z_{12}}} \right)} \right. + \\ &\qquad\left. {\rho _{121}}\tanh \left( {\frac{{{\xi _{12}}}}{{{\varepsilon _{121}}}}} \right) - {{\dot \alpha }_{11}} \right)= \\ &\qquad\;{\xi _{12}}\left( {\tilde \Theta _{12}^{\rm{T}}{\varphi _{12}}\left( {{Z_{12}}} \right) + \hat \Theta _{12}^{\rm{T}}{\varphi _{12}}\left( {{Z_{12}}} \right) + {\varepsilon _{12}}} \right) \end{split} $$ (29) 式中, ${Z_{12}} =( {{z_{11}},{z_{12}},{z_{21}},{z_{22}},{\mu _1},{{\dot \mu }_1},{{\ddot \mu }_1},\hat \Theta _{11}^{}} ),$ 且有
$${\xi _{12}}{\varepsilon _{12}} \leq \frac{1}{2}\xi _{12}^2 + \frac{1}{2}\bar \varepsilon _{12}^2$$ (30) 根据式(26) ~ (30), 构造虚拟控制器和自适应律为
$${\alpha _{12}}{\rm{ }} = - \frac{{{\xi _{12}}\hat \rho _{12}^2\bar \alpha _{12}^2}}{{\sqrt {\xi _{12}^2\hat \rho _{12}^2\bar \alpha _{12}^2 + \varepsilon _{122}^2} }}$$ (31) $${\dot {\hat \Theta} _{12}} = {\xi _{12}}{\varphi _{12}} - {l_{12}}{\hat \Theta _{12}}\qquad$$ (32) $${\dot {\hat \rho} _{12}} = {\xi _{12}}{\bar \alpha _{12}} - {l_{121}}{\hat \rho _{12}}\qquad$$ (33) 式中, ${\bar \alpha _{12}} = \hat \Theta _{12}^{\rm{T}}{\varphi _{12}} + \frac{1}{2}{\xi _{12}} + {\gamma _{12}}{\xi _{12}} + \frac{1}{2}\xi _{12}^{}$, ${\gamma _{12}}$, $\varepsilon _{122}^{}$, ${l_{12}}$和 ${l_{121}}$是设计的正参数.
根据引理1, 可以推出
$$ \begin{split} - \frac{{{A_1}}}{{m{}_1}}{\xi _{12}}{\alpha _{12}} = \;& - \frac{{{A_1}}}{{m{}_1}}\frac{{\xi _{12}^2\hat \rho _{12}^2\bar \alpha _{12}^2}}{{\sqrt {\xi _{12}^2\hat \rho _{12}^2\bar \alpha _{12}^2 + \varepsilon _{122}^2} }} \leq\\ &\frac{{{\varepsilon _{122}}}}{{{\rho _{12}}}} - \frac{1}{{{\rho _{12}}}}{\xi _{12}}{{\hat \rho }_{12}}{{\bar \alpha }_{12}} \leq \\ & \frac{{{\varepsilon _{122}}}}{{{\rho _{12}}}} + \frac{1}{{{\rho _{12}}}}{\xi _{12}}{{\tilde \rho }_{12}}{{\bar \alpha }_{12}} - {\xi _{12}}{{\bar \alpha }_{12}} \end{split}$$ (34) 式中, ${\rho _{12}} = {{m_1}}/{{{A_{{1}}}}}$.
将式(27) ~ (34)代入式(26), 得
$$\begin{split} {{\dot V}_{12}} \leq\;& {{\dot V}_{11}} + \frac{{\xi _{13}^2}}{2} + \frac{{{\varepsilon _{122}}}}{{{\rho _{12}}}} + \frac{{{\xi _{12}}{{\tilde \rho }_{12}}{{\bar \alpha }_{12}}}}{{{\rho _{12}}}} + {\xi _{12}}\tilde \Theta _{12}^{\rm{T}}\varphi {}_{12}\, +\\ &\frac{{\bar \varepsilon _{12}^2 - \xi _{12}^2}}{2} + 0.2785{\varepsilon _{121}}{\rho _{121}} - \tilde \Theta _{1{\rm{2}}}^{\rm{T}}\dot {\hat \Theta} _{1{{2}}}^{} \, -\\ & \frac{{{{\tilde \rho }_{12}}{{\dot {\hat \rho} }_{12}}}}{{{\rho _{12}}}}-{\gamma _{12}}\xi _{12}^2 \leq {{\dot V}_{11}} + \frac{1}{2}\xi _{13}^2 + \frac{{{\varepsilon _{122}}}}{{{\rho _{12}}}} + \frac{1}{2}\bar \varepsilon _{12}^2 \,+\\ &0.2785{\varepsilon _{121}}{\rho _{121}} - \frac{{\xi _{12}^2}}{2} + {l_{12}}\tilde \Theta _{12}^{\rm{T}}{{\hat \Theta }_{12}} \,+\\ & {l_{121}}\frac{1}{{{\rho _{12}}}}{{\tilde \rho }_{12}}{{\hat \rho }_{12}} - {\gamma _{12}}\xi _{12}^2{\rm{ }} \\[-16pt] \end{split} $$ (35) 利用不等式$l\tilde {\left( \cdot \right)}\hat {\left( \cdot \right)} \leq - {{l^2{{\tilde {\left( \cdot \right)}}}}}/{2} + {{l^2{{\left( \cdot \right)}}}}/{2}$($l$是一个正数), 可以求得
$$\begin{split} {{\dot V}_{12}}{\rm{ }} \leq\;& {{\dot V}_{11}} + \frac{1}{2}\xi _{13}^2 + \frac{{{\varepsilon _{122}}}}{{{\rho _{12}}}} + \frac{1}{2}\bar \varepsilon _{12}^2 + 0.2785{\varepsilon _{121}}{\rho _{121}}\, - \\ &\frac{{{l_{12}}}}{2}\tilde \Theta _{12}^{\rm{T}}{{\tilde \Theta }_{12}} - \frac{1}{2}\xi _{12}^2 + \frac{{{l_{12}}}}{2}\Theta _{12}^{\rm{T}}{\Theta _{12}} - \frac{{{l_{121}}}}{{2{\rho _{12}}}}\tilde \rho _{12}^2\, +\\ &\frac{{{l_{121}}}}{{2{\rho _{12}}}}\rho _{12}^2 - {\gamma _{12}}\xi _{12}^2 \leq - {W_{11}}{V_{11}} + {{ O}_{{{11}}}} - {\gamma _{12}}\xi _{12}^2 \,-\\[1.5pt] &\frac{{{l_{12}}}}{2}\tilde \Theta _{12}^{\rm{T}}{{\tilde \Theta }_{12}} - \frac{{{l_{121}}}}{{2{\rho _{12}}}}\tilde \rho _{12}^2 + \frac{1}{2}\xi _{13}^2 + \frac{{{\varepsilon _{122}}}}{{{\rho _{12}}}} + \frac{1}{2}\bar \varepsilon _{12}^2 \,+\\ &0.2785{\varepsilon _{121}}{\rho _{121}} + \frac{{{l_{12}}}}{2}\Theta _{12}^{\rm{T}}{\Theta _{12}} + \frac{{{l_{121}}}}{{2{\rho _{121}}}}\rho _{12}^2 \leq \\ &-{W_{12}}{V_{12}} + \frac{1}{2}\xi _{13}^2 + {O_{12}} \\[-15pt] \end{split} $$ (36) 式中,
$$ {W_{12}} = \min \left\{ {{\gamma _{11}},{\gamma _{12}},{l_{12}},{l_{121}}} \right\}\qquad\qquad\qquad\qquad $$ $$ \begin{split}{O_{12}} =\,& {O_{11}} + \frac{{{\varepsilon _{122}}}}{{{\rho _{12}}}} + \frac{{\bar \varepsilon _{12}^2}}{2} + 0.2785{\varepsilon _{121}}{\rho _{121}} \,+ \\& \frac{{{l_{12}}}}{2}\;\Theta _{12}^{\rm{T}}{\Theta _{12}} +\frac {{{l_{121}}\rho _{12}^2}} {{2{\rho _{121}}}}\qquad\quad\qquad\qquad\qquad\end{split}$$ 步骤 3. 构建第3部分的李雅普诺夫函数, 即
$${V_{13}} = {V_{12}} + \frac{1}{2}\xi _{13}^2 + \frac{1}{2}\tilde \Theta _{13}^{\rm{T}}{\rm{ }}\tilde \Theta _{13}^{} + \frac{1}{{2{\rho _{13}}}}\tilde \rho _{13}^2{\rm{ }}$$ (37) 式中, $\tilde \Theta _{13}^{} = \Theta _{13}^{} - \hat \Theta _{13}^{}$, ${\tilde \rho _{13}} = {\rho _{13}} - {\hat \rho _{13}}$, $\hat \Theta _{13}^{}$是 $\Theta _{13}^{}$的估计值, ${\hat \rho _{13}}$是${\rho _{13}}$的近似估计值, 其具体值将在后文定义.
对$V_{13} $求导, 可得
$$\begin{split} {{\dot V}_{13}} =\;& {{\dot V}_{12}} + {\xi _{13}}\bigg( \frac{{{\beta _e}}}{V}{k_q}u - \frac{{{\beta _e}}}{V}( {A_1}{z_{12}}\, +\\ &{C_t}\left( {{z_{{{13}}}} - {P_2}} \right) ) - {{\dot \alpha }_{12}} \bigg) - \tilde \Theta _{13}^{\rm{T}}\dot {\hat \Theta} _{13}^{} - \frac{1}{{{\rho _{13}}}}\tilde \rho _{13}^{}{{\dot {\hat \rho} }_{13}} \\ \end{split} $$ (38) 根据引理2可知,
$$ \begin{split} &{\xi _{13}} \cdot \frac{{{\beta _e}}}{V}{C_t}{P_2} \leq \left| {{\xi _{13}}} \right|{\rho _{131}} \le \\[1.5pt] &\quad\quad\;{\xi _{13}}{\rho _{131}}\tanh \left( {\frac{{{\xi _{13}}}}{{{\varepsilon _{131}}}}} \right) + 0.2785{\varepsilon _{131}}{\rho _{131}} \end{split} $$ (39) 式中, ${\rho _{131}} = \dfrac{{{\beta _e}}}{V}{C_t}{P_2}\,.$
采用RBF神经网络来逼近未知的非线性函数, 即
$$\begin{split} &{\xi _{13}}\left( - \frac{{{\beta _e}}}{V}\left( {{A_1}{z_{12}} + {C_t}{z_{{{13}}}}} \right) - {{\dot \alpha }_{12}} \,+\right.\\ &\quad\quad\left.{\rho _{131}}\tanh \left( {\frac{{{\xi _{13}}}}{{{\varepsilon _{131}}}}} \right) \right) = {\xi _{13}}\left( {\Theta _{13}^{\rm{T}}{\varphi _{13}}\left( {{Z_{13}}} \right) + {\varepsilon _{13}}} \right) \end{split} $$ (40) 式中,
$$ \begin{split}&{Z_{13}} = \Big({z_{11}},{z_{12}},{z_{13}},{z_{21}},{z_{22}},{z_{23}},\\ & \quad\quad\quad \left.{\mu _1},{{\dot \mu }_1},{{\ddot \mu }_1}, \mu _1^{\left( 3 \right)}, \hat \Theta _{11}^{},\hat \Theta _{12}^{},\hat \rho _{12}^{}{\rm{ }} \right)\end{split}$$ 由杨氏不等式可知
$${\xi _{13}}{\varepsilon _{13}} \leq \frac{1}{2}\xi _{13}^2 + \frac{1}{2}\bar \varepsilon _{13}^2$$ (41) 根据式(38) ~ (41), 选取控制器和自适应律为
$$u{\rm{ }} = - \frac{{{\xi _{13}}\hat \rho _{13}^2\bar \alpha _{13}^2}}{{\sqrt {\xi _{13}^2\hat \rho _{13}^2\bar \alpha _{13}^2 + \varepsilon _{132}^2} }}$$ (42) $${\dot {\hat \Theta} _{13}} = {\xi _{13}}{\varphi _{13}} - {l_{13}}{\hat \Theta _{13}}\;\;\;\;$$ (43) $${\dot {\hat \rho} _{13}} = {\xi _{13}}{\bar \alpha _{13}} - {l_{131}}{\hat \rho _{13}}\;\;\;$$ (44) 式中, ${\bar \alpha _{13}} = \hat \Theta _{13}^{\rm{T}}{\varphi _{13}} + \dfrac{1}{2}{\xi _{13}} + {\gamma _{13}}{\xi _{13}} + \dfrac{1}{2}{\xi _{13}}$, $\varepsilon _{132}^{}$, ${l_{13}}$和 ${l_{131}}$是设计的正参数.
将式(42)代入式(38), 得
$$\begin{split} \frac{{{\beta _e}}}{V}{k_q}{\xi _{13}}u =\;& - \frac{{\xi _{13}^2\hat \rho _{13}^2\bar \alpha _{13}^2}}{{\sqrt {\xi _{13}^2\hat \rho _{13}^2\bar \alpha _{13}^2 + \varepsilon _{132}^2} }}\frac{{{\beta _e}}}{V}{k_q} \leq \\ &\frac{{{\varepsilon _{132}}}}{{{\rho _{13}}}} - \frac{1}{{{\rho _{13}}}}{\xi _{13}}{{\hat \rho }_{13}}{{\bar \alpha }_{13}} \leq \\ &\frac{{{\varepsilon _{132}}}}{{{\rho _{13}}}} + \frac{1}{{{\rho _{13}}}}{\xi _{13}}{{\tilde \rho }_{13}}{{\bar \alpha }_{13}} - {\xi _{13}}{{\bar \alpha }_{13}} \end{split} $$ (45) 式中, ${\rho _{13}} = \dfrac{V}{{{\beta _e}{k_q}}}$.
将式(39) ~ (45)代入式(38), 得
$$\begin{split} {{\dot V}_{13}} \leq\;& {{\dot V}_{12}} + \frac{{{\varepsilon _{132}}}}{{{\rho _{12}}}} + \frac{1}{2}\bar \varepsilon _{13}^2 + 0.2785{\varepsilon _{131}}{\rho _{131}} -\\ &{\gamma _{11}}\xi _{13}^2 + {l_{13}}\tilde \Theta _{13}^{\rm{T}}{{\hat \Theta }_{13}} + {l_{131}}\frac{1}{{{\rho _{13}}}}\tilde \rho _{13}^{}\hat \rho _{13}^{} \,-\\ &\frac{1}{2}\xi _{13}^2 \leq {{\dot V}_{12}} + \frac{{{\varepsilon _{132}}}}{{{\rho _{12}}}} + \frac{1}{2}\bar \varepsilon _{13}^2 + 0.2785{\varepsilon _{131}}{\rho _{131}} -\\ &\frac{{{l_{13}}}}{2}\tilde \Theta _{13}^{\rm{T}}{{\tilde \Theta }_{13}} - {\gamma _{11}}\xi _{13}^2 + \frac{{{l_{13}}}}{2}\Theta _{13}^{\rm{T}}{\Theta _{13}} - \frac{{{l_{131}}}}{{2{\rho _{13}}}}\tilde \rho _{13}^2 \,+\\ &\frac{{{l_{131}}}}{{2{\rho _{13}}}}\rho _{13}^2 - \frac{1}{2}\xi _{13}^2 \leq - {W_{13}}{V_{13}} + {O_{13}} \\[-17pt] \end{split}$$ (46) 式中,
$$ {W_{13}} = \min \left\{ {{\gamma _{11}},{l_{13}},{l_{131}}} \right\} \qquad\qquad\qquad\qquad $$ $$ \begin{split} {O_{13}} =\;& {O_{12}} + \dfrac{{{\varepsilon _{132}}}}{{{\rho _{13}}}} + \dfrac{1}{2}\bar \varepsilon _{13}^2 + 0.2785{\varepsilon _{131}}{\rho _{131}}\, +\\& \dfrac{{{l_{13}}}}{2}\Theta _{13}^{\rm{T}}{\Theta _{13}} + \dfrac{{{l_{131}}}}{2}\dfrac{1}{{{\rho _{131}}}}\rho _{13}^2 \end{split}$$ 2.2 耦合扭振控制设计
针对轧机主传动扭振系统, 引入下面的反步坐标变换
$$ \left\{ \begin{aligned}&{\xi }_{21}={z}_{21}-{z}_{2{d}} \\ &{\xi }_{22}={z}_{22}-{\alpha }_{21} \\ &{\xi }_{23}={z}_{23}-{\alpha }_{22}\end{aligned}\right.$$ (47) 与耦合垂振类似, 为了限制输出变量${\xi _{21}}$的性能, 构造非对称的正切障碍李雅普诺夫函数, 即
$${\bar V_{21}} = \frac{{{\mu^2 _2}\left( t \right)}}{{\pi {h_{21}}\left( {{\xi _{21}}} \right)}}\tan \left( {\frac{{\pi \xi^2 _{21}{h_{21}}\left( {{\xi _{21}}} \right)}}{{2{\mu^2 _2}\left( t \right)}}} \right)$$ (48) 式中,
$$ {h_{21}}\left( {{\xi _{21}}} \right) = \dfrac{{{b_{{{2}}1}}\left( {{\xi _{21}}} \right)}}{{\underline \delta _{{{2}}1}^2}} + \dfrac{{1 - {b_{21}}\left( {{\xi _{21}}} \right)}}{{\bar \delta _{21}^2}} $$ $$ {b_{21}}\left( {{\xi _{21}}} \right) = \left\{ {\begin{aligned} {1,\quad\;{\xi _{21}} \geq {{0}}} \\ {0,\quad\;{\xi _{21}} < {{0}}} \end{aligned}}\right.$$ ${\underline \delta _{21}}$和 ${\bar \delta _{21}}$是正实数, ${\mu _{{2}}} = {\mu _{20}}{{\rm{e}}^{ - {k_{2}}t}}\, + {\mu _{{2}\infty }}$, ${\mu _{20}}$, ${k_{{2}}}$和 ${\mu _{{{2}}\infty }}$是给定的正实数.
步骤 1. 为了使得输出变量${\xi _{{{21}}}}$趋于稳定, 构建第1部分的李雅普诺夫函数如下式:
$${V_{21}} = {\bar V_{21}} + \frac{1}{2}\tilde \Theta _{21}^{\rm{T}}{\rm{ }}\tilde \Theta _{21}^{} + \frac{1}{{2{\rho _{{{21}}}}}}\tilde \rho _{{{21}}}^2{\rm{ }}$$ (49) 式中, ${\tilde \rho _{12}} = {\rho _{12}} - {\hat \rho _{12}}$, ${\hat \rho _{12}}$是${\rho _{12}}$的估计值, 将会在后文定义.
对${V_{21}}$求导, 可得
$$\begin{aligned} {{\dot V}_{21}} =\;& \frac{{2{{\dot \mu }_{{2}}}}}{{{\mu _{{2}}}}}{{\bar V}_{{{2}}1}} - \frac{{{{\dot \mu }_{{2}}}}}{{{\mu _{{2}}}}}{\xi _{{{2}}1}}{\nu _{{{2}}1}} + {\nu _{{{2}}1}}{{\dot \xi }_{{{2}}1}} - \tilde \Theta _{{{2}}1}^{\rm{T}}\dot {\hat \Theta} _{{{2}}1}^{}\, -\\ &\frac{1}{{{\rho _{{{21}}}}}}\tilde \rho _{{{21}}}^{}{{\dot {\hat \rho} }_{{{21}}}} \leq {\nu _{21}}\left( \frac{{K{z_{22}}}}{{{J_L}}} \,+ \right. \\ &\frac{{aR{F_z}\left( {{z_{11}},{z_{12}}} \right){{\rm{e}}^{ - b{z_{21}}R + c}}}}{{{J_L}}} + \frac{{{c_3}}}{{{J_L}}}{z_{21}} {\rm{ + }}\frac{{{T_L}}}{{{J_L}}} \,- \\ &\left.\frac{{{c_4}}}{{{J_L}}}z_{21}^3+{f_{21}}\left( {{z_{{{11}}}}} \right) \right) + 2{\gamma _{20}}{{\bar V}_{21}} + {\gamma _{20}}{\xi _{21}}{\nu _{21}} \, -\\ & \tilde \Theta _{21}^{\rm{T}}\dot {\hat \Theta} _{21}^{} - \frac{1}{{{\rho _{{{21}}}}}}\tilde \rho _{{{21}}}^{}{{\dot {\hat \rho} }_{{{21}}}} \\[-17pt] \end{aligned} $$ (50) 式中,
$$ {\nu _{21}} = \dfrac{{{\xi _{21}}}}{{{{\cos }^2}\left( {\dfrac{{\pi \xi _{21}^2{h_{21}}\left( {{\xi _{21}}} \right)}}{{2\mu _2^2}}} \right)}}$$ $$ {\gamma }_{20}=\sqrt{{\left(\dfrac{{\dot{\mu }}_{2}}{{\mu }_{2}}\right)}^{2}+{\epsilon}_{2}}\qquad\;\;$$ $ {\epsilon}_{2}$是给定的正数.
在轧制过程中, 考虑到不同厚度和规格的产品在切换过程会使得负载转矩存在不确定的干扰. 因此负载转矩可以表示为
$${T_L} = {T_{L1}} + {T_{LD}}$$ (51) 式中, ${T_{L1}}$为稳定轧制时的负载转矩; ${T_{LD}}$为轧制过程存在干扰导致的干扰转矩, 并且干扰转矩${T_{LD}}$存在上界, 即${T_L} \leq {\bar T_L}$.
根据引理2可知,
$$\begin{split} &{\nu _{21}}\frac{{{T_L}}}{{{J_L}}} \leq \left| {{\nu _{21}}} \right|{\rho _{211}} \leq\\ &\qquad\qquad\;{\nu _{21}}{\rho _{211}}\tanh \left( {\frac{{{\xi _{21}}}}{{{\varepsilon _{211}}}}} \right) + 0.2785{\varepsilon _{211}}{\rho _{211}} \end{split} $$ (52) 式中, ${\rho _{211}} ={{{J_L}}}/{{{T_L}}}$.
根据定义的状态变换${z_{22}} = {\xi _{22}} + {\alpha _{21}}$, 由杨氏不等式可得
$${\nu _{21}}\frac{K}{{{J_L}}}{\xi _{22}} \leq \frac{1}{2}\frac{{{K^2}}}{{J_L^2}}\nu _{21}^2 + \frac{1}{2}\xi _{22}^2$$ (53) 利用RBF神经网络来逼近未知的非线性函数, 即
$$\begin{split} &{\nu _{21}}\left( {\frac{{{K^2}}}{{J_L^2}}{\nu _{21}} + {\rho _{211}}\tanh \left( {\frac{{{\xi _{21}}}}{{{\varepsilon _{211}}}}} \right)} \right.{\rm{ + }}\frac{{{c_3}}}{{{J_L}}}{z_{21}} - \frac{{{c_4}z_{21}^3}}{{{J_L}}} \,+\\ & \qquad\left. { \frac{{aR{F_z}\left( {{z_{11}},{z_{12}}} \right){{\rm{e}}^{ - b{z_{21}}R + c}}}}{{{J_L}}}{\rm{ + }}{f_{21}}\left( {{z_{{{11}}}}} \right)} \right) =\\ & \qquad{\nu _{21}}\left( {\Theta _{21}^{\rm{T}}{\varphi _{{{21}}}}\left( {{Z_{21}}} \right){\rm{ + }}{\varepsilon _{{{21}}}}} \right) \leq \\ & \qquad {\nu _{21}}\big( {\tilde \Theta _{{{21}}}^{\rm{T}}{\varphi _{{{21}}}}\left( {{Z_{21}}} \right) + \hat \Theta _{{{21}}}^{\rm{T}}{\varphi _{{{21}}}}\left( {{Z_{21}}} \right)} \big) + \frac{1}{2}\nu _{{{21}}}^{{2}} + \frac{1}{2}\bar \varepsilon _{{{21}}}^{{2}} \end{split} $$ (54) 式中, ${Z_{21}} = \left( {{z_{11}},{z_{12}},{z_{21}},{\mu _2},{{\dot \mu }_2}} \right) .$
根据式(50) ~ (54), 选取的虚拟控制器和自适应律分别为
$${\alpha _{{{21}}}} = - \frac{{{\nu _{21}}\hat \rho _{21}^2\bar \alpha _{21}^2}}{{\sqrt {\nu _{21}^2\hat \rho _{21}^2\bar \alpha _{21}^2 + \varepsilon _{212}^2} }}$$ (55) $${\dot {\hat \Theta} _{21}} = {\nu _{21}}{\varphi _{21}} - {l_{21}}{\hat \Theta _{21}}\quad\quad$$ (56) $${\dot {\hat \rho} _{12}} = {\nu _{21}}{\bar \alpha _{21}} - {l_{211}}{\hat \rho _{21}}\qquad$$ (57) 式中,
$$ \begin{split}{{\bar \alpha }_{21}} = {{\hat \Theta }_{21}}{\varphi _{21}} + \dfrac{1}{2}{\nu _{21}} + {\gamma _{20}}{\xi _{21}} + ( 2{\gamma _{20}} + {\gamma _{21}} )\,\times \\ \dfrac{{{\mu ^2_2}}}{{\pi \xi _{21}^{}{h_{21}}}}\sin \left( {\dfrac{{\pi {\xi^2 _{21}}{h_{21}}}}{{2{\mu^2 _2}}}} \right)\cos \left( {\dfrac{{\pi {\xi^2 _{21}}{h_{21}}}}{{2{\mu^2 _2}}}} \right) \end{split} $$ $\varepsilon _{212}^{}$, ${l_{21}}$和${l_{211}}$是设计的正参数.
根据引理1, 可得
$$\begin{split} {\nu _{{{21}}}}\frac{K}{{{J_L}}}{\alpha _{21}} =\;& - \frac{{\nu _{21}^2\hat \rho _{21}^2\bar \alpha _{21}^2}}{{\sqrt {\nu _{21}^2\hat \rho _{21}^2\bar \alpha _{21}^2 + \varepsilon _{212}^2} }}\frac{K}{{{J_L}}} \leq \\ &\frac{{{\varepsilon _{212}}}}{{{\rho _{21}}}} - \frac{1}{{{\rho _{21}}}}\nu _{21}^{}{{\hat \rho }_{21}}{{\bar \alpha }_{21}} \leq\\ &\frac{{{\varepsilon _{212}}}}{{{\rho _{21}}}} + \frac{1}{{{\rho _{21}}}}\nu _{21}^{}{{\tilde \rho }_{21}}{{\bar \alpha }_{21}} - {\nu _{21}}{{\bar \alpha }_{21}} \end{split} $$ (58) 式中, ${\rho _{21}} ={{{J_L}}}/{K}$.
将式(52) ~ (58)代入式(50), 可得
$$\begin{split} {{\dot V}_{21}} \leq\;& - {\gamma _{21}}{{\bar V}_{21}} + \frac{1}{2}\xi _{22}^2 + \frac{1}{2}\bar \varepsilon _{21}^2 + 0.2785{\varepsilon _{121}}{\rho _{121}} \,+ \\ & \frac{{{\varepsilon _{212}}}}{{{\rho _{21}}}} + \frac{1}{{{\rho _{21}}}}{{\tilde \rho }_{21}}{l_{211}}{{\hat \rho }_{21}} + {l_{21}}\tilde \Theta _{21}^{\rm{T}}{{\hat \Theta }_{21}} \\[-16pt] \end{split} $$ (59) 利用不等式$l\tilde {\left( \cdot \right)}\hat {\left( \cdot \right)} \leq - \dfrac{{l^2{{\tilde {\left( \cdot \right)}}}}}{2} + \dfrac{{l^2{{\left( \cdot \right)}}}}{2}$ ($l$是一个正数), 可以求得
$$\begin{split} {{\dot V}_{21}} \leq\;& - {\gamma _{21}}{{\bar V}_{21}} - \frac{{{l_{21}}}}{2}\tilde \Theta _{21}^{\rm{T}}{{\tilde \Theta }_{21}} - \frac{{{l_{211}}}}{2}\frac{{\tilde \rho _{21}^2}}{{{\rho _{21}}}}\, +\\ &\frac{1}{2}\xi _{22}^2 + {O_{21}} \leq - {W_{21}}{V_{21}} + \frac{1}{2}\xi _{22}^2 + {O_{21}} \end{split} $$ (60) 式中,
$$ {W_{21}} = \min \left\{ {{\gamma _{21}},\;{l_{21}},\;{l_{211}}} \right\} \qquad\qquad\quad\;\;$$ $$\begin{split} {O_{21}} =\,& \dfrac{1}{2}\;\bar \varepsilon _{21}^2\, + 0.2785{\varepsilon _{121}}{\rho _{121}} + \dfrac{{{\varepsilon _{212}}}}{{{\rho _{21}}}}\, +\\& \dfrac{{{l_{21}}}}{2}\Theta _{21}^{\rm{T}}{\Theta _{21}} + \dfrac{{{l_{211}}}}{2}\dfrac{1}{{{\rho _{21}}}}\rho _{21}^2\end{split} $$ 步骤 2. 构建第2部分的李雅普诺夫函数, 即
$${V_{22}} = {V_{21}} + \frac{1}{2}\xi _{22}^2 + \frac{1}{2}\tilde \Theta _{22}^{\rm{T}}\tilde \Theta _{22}^{}$$ (61) 式中, ${\tilde \Theta _{{\rm{22}}}} = {\Theta _{{\rm{22}}}} - {\hat \Theta _{{\rm{22}}}}$, ${\hat \Theta _{{\rm{22}}}}$是${\Theta _{{\rm{22}}}}$的估计值, ${\hat \Theta _{{\rm{22}}}}$将在后文定义.
对${V_{22}}$求导, 可得
$$ {{\dot V}_{22}} = {{\dot V}_{21}} + {\xi _{22}}\left( {{\xi _{23}} + {\alpha _{22}} - {z_{21}} - {{\dot \alpha }_{21}}} \right) - \tilde \Theta _{22}^{\rm{T}}\dot {\hat \Theta} _{22}^{} $$ (62) 利用RBF神经网络来逼近未知的非线性函数, 即
$$ \begin{split} - {\xi _{22}}{{\dot \alpha }_{21}}=\;&{\xi _{22}}\left( {\Theta _{{{22}}}^{\rm{T}}{\varphi _{22}}\left( {{Z_{22}}} \right) + {\varepsilon _{22}}} \right) = \\ &{\xi _{22}}\left( {\tilde \Theta _{22}^{\rm{T}}{\varphi _{22}}\left( {{Z_{22}}} \right) + \hat \Theta _{22}^{\rm{T}}{\varphi _{22}}\left( {{Z_{22}}} \right) + {\varepsilon _{22}}} \right) \end{split} $$ (63) 式中,
$$ {Z_{22}} = \Big( {z_{11}},{z_{12}},{z_{13}},{z_{21}},{z_{22}},{\mu _2},{{\dot \mu }_2},{{\ddot \mu }_2},{{\hat \Theta }_{21}}, {{\hat \rho }_{21}} \Big)$$ 由杨氏不等式, 可知
$${\xi _{22}}{\xi _{23}} \leq \frac{1}{2}\xi _{22}^2 + \frac{1}{2}\xi _{23}^2$$ (64) $${\xi _{22}}{\varepsilon _{22}} \leq \frac{1}{2}\xi _{22}^2 + \frac{1}{2}\bar \varepsilon _{22}^2$$ (65) 根据式(62) ~ (65), 选取虚拟控制器和自适应律为
$${\alpha _{22}} = {z_{21}} - {\xi _{22}} - \hat \Theta _{22}^{\rm{T}}{\varphi _{22}} - {\gamma _{22}}{\xi _{22}} - \frac{1}{2}{\xi _{22}}$$ (66) $${\dot {\hat \Theta} _{22}} = {\xi _{22}}{\varphi _{22}} - {l_{22}}{\hat \Theta _{22}}\qquad\qquad\qquad\qquad\;\;$$ (67) 将式(63) ~ (67)代入式(62), 可得
$$\begin{split} {{\dot V}_{22}} \leq\;& {{\dot V}_{21}} + \frac{{\xi _{23}^2}}{2} + \frac{{\bar \varepsilon _{22}^2}}{2} + {l_{22}}\tilde \Theta _{22}^{\rm{T}}{{\hat \Theta }_{22}} - {\gamma _{22}}\xi _{22}^2 \,-\\ &\frac{{\xi _{22}^2}}{2} \leq {{\dot V}_{21}} - {\gamma _{22}}\xi _{22}^2 - \frac{{{l_{22}}}}{2}\tilde \Theta _{22}^{\rm{T}}\tilde \Theta _{22}^{} \,+\\ &\frac{{{l_{22}}}}{2}\Theta _{22}^{\rm{T}}\Theta _{22}^{} + \frac{1}{2}\bar \varepsilon _{22}^2 + \frac{1}{2}\xi _{23}^2 - \frac{1}{2}\xi _{22}^2 \leq \\ &-{W_{22}}{V_{22}} + \frac{1}{2}\xi _{23}^2 + {O_{22}} \\[-8pt] \end{split} $$ (68) 式中,
$$ {W_{22}} \;=\; \min \left\{ {{W_{21}},\;{\gamma _{22}},\;{l_{22}}} \right\}\qquad\;\;$$ $$ {O_{22}} \;=\; {O_{21}}\; + \dfrac{{{l_{22}}}}{2}\Theta _{22}^{\rm{T}}\Theta _{22}^{} + \dfrac{1}{2}\bar \varepsilon _{22}^2 $$ 步骤 3. 构建第3部分的李雅普诺夫函数, 即
$${V_{23}} = {V_{22}} + \frac{{\xi _{23}^2}}{2} + \frac{1}{2}\tilde \Theta _{23}^{\rm{T}}{\rm{ }}\tilde \Theta _{23}^{} + \frac{{\tilde \rho _{23}^2{\rm{ }}}}{{2{\rho _{23}}}}$$ (69) 式中, ${\tilde \rho _{23}} = {\rho _{23}} - {\hat \rho _{23}}$, ${\hat \rho _{23}}$是${\rho _{23}}$的估计, 将在后文定义.
对${V_{23}}$求导, 可得
$$\begin{split} {{\dot V}_{23}} =\;& {{\dot V}_{22}} + {\xi _{23}}\left( {\frac{{{T_m}}}{{{J_m}}} + \frac{{{c_1}}}{{{J_m}}}{z_{23}} - \frac{{{c_2}}}{{{J_m}}}z_{23}^3}\,- \right. \\ &\left. \frac{K}{{{J_m}}}{z_{22}} - {{\dot \alpha }_{22}} \right) - \tilde \Theta _{23}^{\rm{T}}\dot {\hat \Theta} _{23}^{} - \frac{1}{{{\rho _{{{23}}}}}}\tilde \rho _{{{23}}}^{}{{\dot {\hat \rho} }_{{\rm{23}}}} \end{split} $$ (70) 利用RBF神经网络来逼近未知的非线性函数, 即
$$\begin{split} &{\xi _{23}}\left( {\frac{{{c_1}}}{{{J_m}}}{z_{23}} - \frac{{{c_2}}}{{{J_m}}}z_{23}^3 - \frac{K}{{{J_m}}}{z_{22}} - {{\dot \alpha }_{22}}} \right)= \\ &\qquad {\xi _{23}}\left( {\Theta _{{{23}}}^{\rm{T}}{\varphi _{23}}\left( {{Z_{{{23}}}}} \right) + {\varepsilon _{23}}} \right) \end{split} $$ (71) 式中,
$$ \begin{split} {Z_{{{23}}}} =\, &\Big( {{z_{11}},{z_{12}},{z_{13}},{z_{21}},{z_{22}},{z_{23}},u,} \\&{\hat \Theta _{21}},{\hat \Theta _{22}}, {\hat \rho _{21}}, {\mu _2}, {{\dot \mu }_2},{{\ddot \mu }_2},\mu _2^{(3)} \Big) \end{split}$$ 由杨氏不等式, 可知
$${\xi _{23}}{\varepsilon _{23}} \leq \frac{1}{2}\xi _{23}^2 + \frac{1}{2}\bar \varepsilon _{23}^2$$ (72) 根据式(71)和式(72), 选取的虚拟控制器和自适应律分别为
$${T_m}{\rm{ }} = - \frac{{{\xi _{23}}\hat \rho _{23}^2\bar \alpha _{23}^2}}{{\sqrt {\xi _{23}^2\hat \rho _{23}^2\bar \alpha _{23}^2 + \varepsilon _{232}^2} }}$$ (73) $${\dot {\hat \Theta} _{23}} = {\xi _{23}}{\varphi _{23}} - {l_{23}}{\hat \Theta _{23}}\qquad$$ (74) $${\dot {\hat \rho} _{23}} = {\xi _{23}}{\bar \alpha _{23}} - {l_{231}}{\hat \rho _{23}}\qquad$$ (75) 式中,
$$ {\bar \alpha _{23}} = \hat \Theta _{23}^{\rm{T}}{\varphi _{23}} + \dfrac{1}{2}{\xi _{23}} + {\gamma _{23}}{\xi _{23}} - \dfrac{1}{2}{\xi _{23}}$$ $\varepsilon _{232}^{}$, ${l_{23}}$和${l_{231}}$是设计的正参数.
根据引理1, 可得
$$\begin{split} {\xi _{23}}\frac{{{T_m}}}{{{J_m}}} =\;& - \frac{{\xi _{23}^2\hat \rho _{23}^2\bar \alpha _{23}^2}}{{\sqrt {\xi _{23}^2\hat \rho _{23}^2\bar \alpha _{23}^2 + \varepsilon _{232}^2} }}\frac{1}{{{J_m}}} \leq \\ &\frac{{{\varepsilon _{232}}}}{{{\rho _{23}}}} - \frac{1}{{{\rho _{23}}}}{\xi _{23}}{{\hat \rho }_{23}}{{\bar \alpha }_{23}} \leq \\ &\frac{{{\varepsilon _{232}}}}{{{\rho _{23}}}} + \frac{1}{{{\rho _{23}}}}{\xi _{23}}{{\tilde \rho }_{23}}{{\bar \alpha }_{23}} - {\xi _{23}}{{\bar \alpha }_{23}} \end{split} $$ (76) 将式(71) ~ (76)代入式(70), 可得
$$\begin{split} {{\dot V}_{23}} \leq\;& {{\dot V}_{22}} - {\gamma _{23}}\xi _{23}^2 - \frac{{{l_{23}}}}{2}\tilde \Theta _{23}^{\rm{T}}\tilde \Theta _{23}^{} - \frac{{{l_{231}}}}{2}\frac{1}{{{\rho _{23}}}}\tilde \rho _{23}^2 \,+\\ & \frac{{\bar \varepsilon _{23}^2}}{2} + \frac{{{\varepsilon _{232}}}}{{{\rho _{23}}}} + \frac{{{l_{23}}}}{2}\Theta _{23}^{\rm{T}}\Theta _{23}^{} + \frac{{{l_{231}}}}{2}\frac{1}{{{\rho _{23}}}}\rho _{23}^2\; - \\ &\frac{1}{2}\xi _{23}^2 \leq - {W_{23}}{V_{23}} + {O_{23}} \\[-15pt] \end{split} $$ (77) 式中,
$$ {W_{23}} = \min \left\{ {{W_{22}},\;{\gamma _{23}},\;{l_{23}},\;{l_{231}}} \right\}\qquad\qquad\qquad\quad\;\;\;\;$$ $$ {O_{23}} = {O_{22}} + \dfrac{1}{2}\bar \varepsilon _{23}^2 + \dfrac{{{\varepsilon _{232}}}}{{{\rho _{23}}}} + \dfrac{{{l_{23}}}}{2}\Theta _{23}^{\rm{T}}\Theta _{23}^{} + \dfrac{{{l_{231}}}}{2}\dfrac{1}{{{\rho _{23}}}}\rho _{23}^2$$ 下面给出本文主要结果.
定理 1. 针对建立的轧机耦合垂振系统(12)和耦合扭振系统(13), 考虑耦合系统存在输出受限问题, 设计的动态控制器(22), (31), (42), (55), (66), (73)和自适应律(23), (32), (33), (43), (44), (56), (57), (67), (74), (75), 使得系统中所有的信号均是最终一致有界, 并且轧辊振动位移和负载转速跟踪误差被严格限制在非对称上下界内, 从而实现了对耦合振动的有效抑制.
证明. 针对轧机机电液垂扭耦合振动系统, 选取整体李雅普诺夫函数为$V = {V_{13}} + {V_{23}}$, 根据式(46)和式(77), 可以得出轧机耦合振动系统的李雅普诺夫函数导数满足
$$\dot V \leq - \varpi V + O$$ (78) 式中, $O = {O_{13}} + {O_{23}}$, $\varpi = \min \left\{ {{W_{13}}} \right.,\left. {{W_{23}}} \right\}$.
根据李雅普诺夫稳定性定理, 可直接得出本文结果.
□ 注 1. 本文针对轧机机电液垂扭耦合系统进行耦合振动控制器设计. 由于轧机机电液垂扭耦合系统的特定结构(扭振系统的第一个动态方程包含了垂振系统的前两个动态), 对于关联系统普遍采用的分散设计方法[37−38]会造成控制器嵌套问题, 故而不能应用于本文构建的垂扭耦合系统中. 因此, 本文针对该特定形式的系统, 提出了新的耦合设计方法. 通过依次对垂振系统和扭振系统设计相应的耦合振动控制器, 最终实现对轧机机电液垂扭耦合振动的抑制控制.
注 2. 本文考虑轧机机电液耦合系统存在输出受限特性, 基于反步法和李雅普诺夫稳定的思想, 设计了轧机机电液垂扭耦合振动控制算法, 利用李雅普诺夫稳定判据证明了轧机机电液垂扭耦合振动系统中状态变量的有界稳定性. 对李雅普诺夫函数求导存在小的残差集合$O$, 可通过调节设计参数使其任意小.
3. 仿真验证
为验证本文提出的控制算法的有效性, 选取650 mm轧机为仿真对象, 仿真验证参数如表1所示. 性能约束函数选取为$5{{\rm{e}}^{ - 5t}} + 0.1 < {\xi _{{{1}}1}} < 0.5 \left( {5{{\rm{e}}^{ - 5t}} + 0.1} \right)$, $5{{\rm{e}}^{ - 5t}} + 0.1 < {\xi _{21}} < 0.5( 5{{\rm{e}}^{ - 5t}} + 0.1 )$, 选取控制律和自适应律如式(22), (23), (31) ~ (33), (42) ~ (44), (55) ~ (57), (66) ~ (67), (73) ~ (75), 同时设计参数为${z}_{2d}=20, {\gamma }_{i}=10, {\varepsilon }_{ij}= 0.01, {l}_{ij}={l}_{{\theta }_{i}}=1$, 高斯函数选取为
$$ \begin{split} {\varphi }_{i}\left({Z}_{i}\right)=\;&\Big[-0.5\exp{\left({Z}_{i}-16\right)}^{2}, -0.5\exp{\left({Z}_{i}-12\right)}^{2},\\ &-0.5\exp{\left({Z}_{i}-8\right)}^{2},\;-0.5\exp{\left({Z}_{i}-4\right)}^{2},\\ &-0.5\exp\left({Z}_{i}{}\right)^{2}, -0.5\exp{\left({Z}_{i}+4\right)}^{2},\\ & -0.5\exp{\left({Z}_{i}+8\right)}^{2},-0.5\exp{\left({Z}_{i}+12\right)}^{2},\\ & - 0.5\exp {{\left( {{Z_i} + 16} \right)}^2} \Big]^{\rm{T}} \end{split} $$ 轧机垂扭耦合系统状态初始值选取为
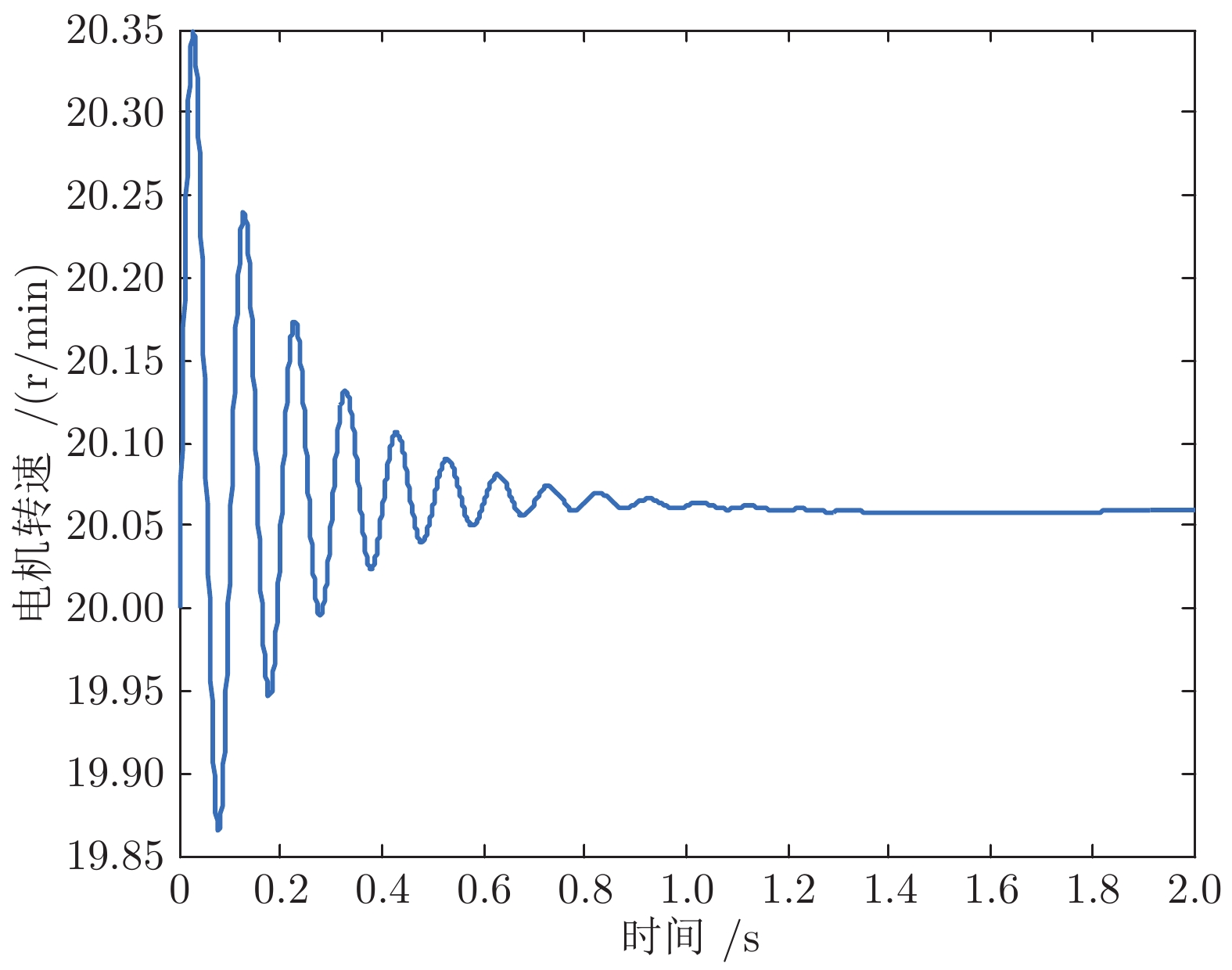
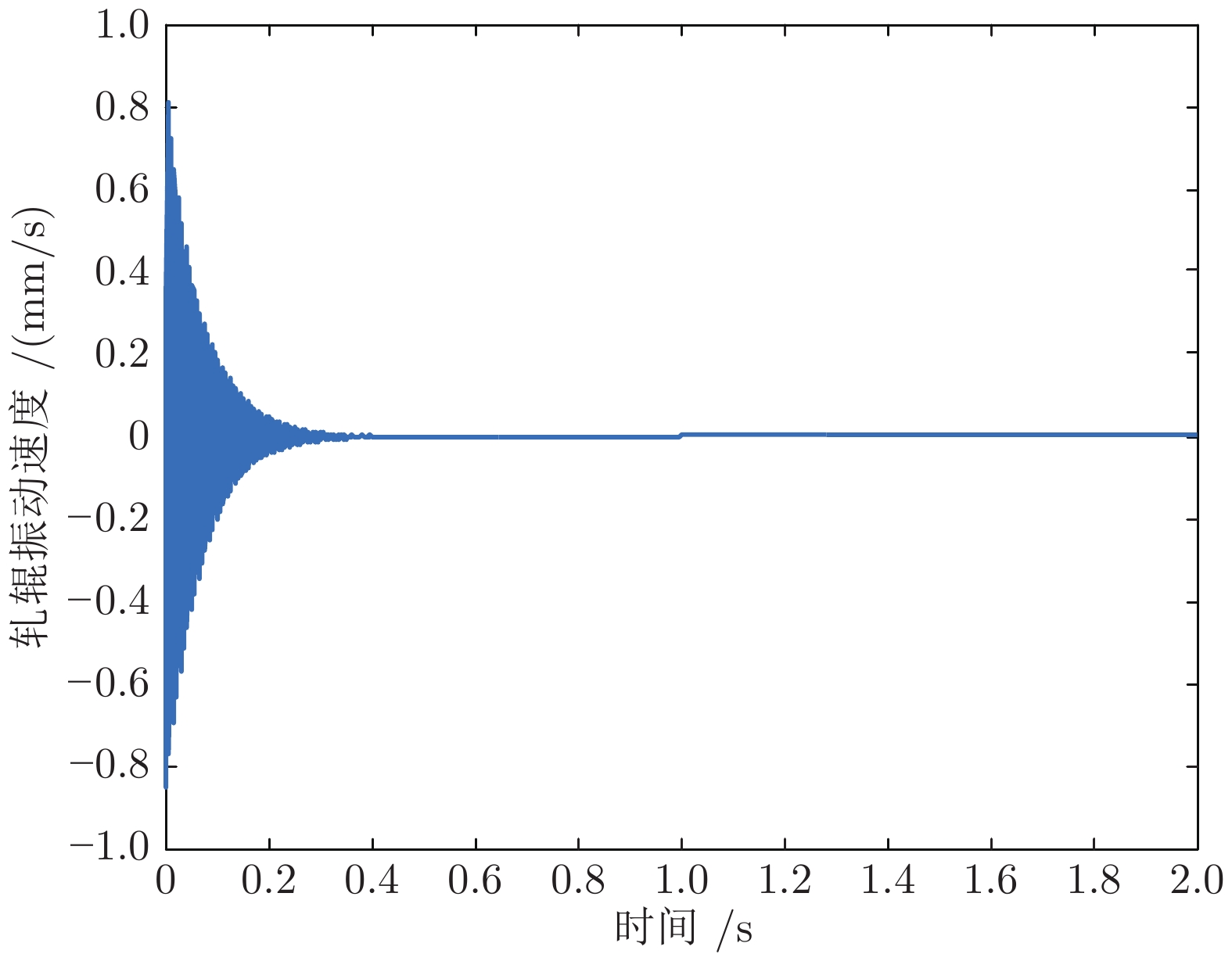
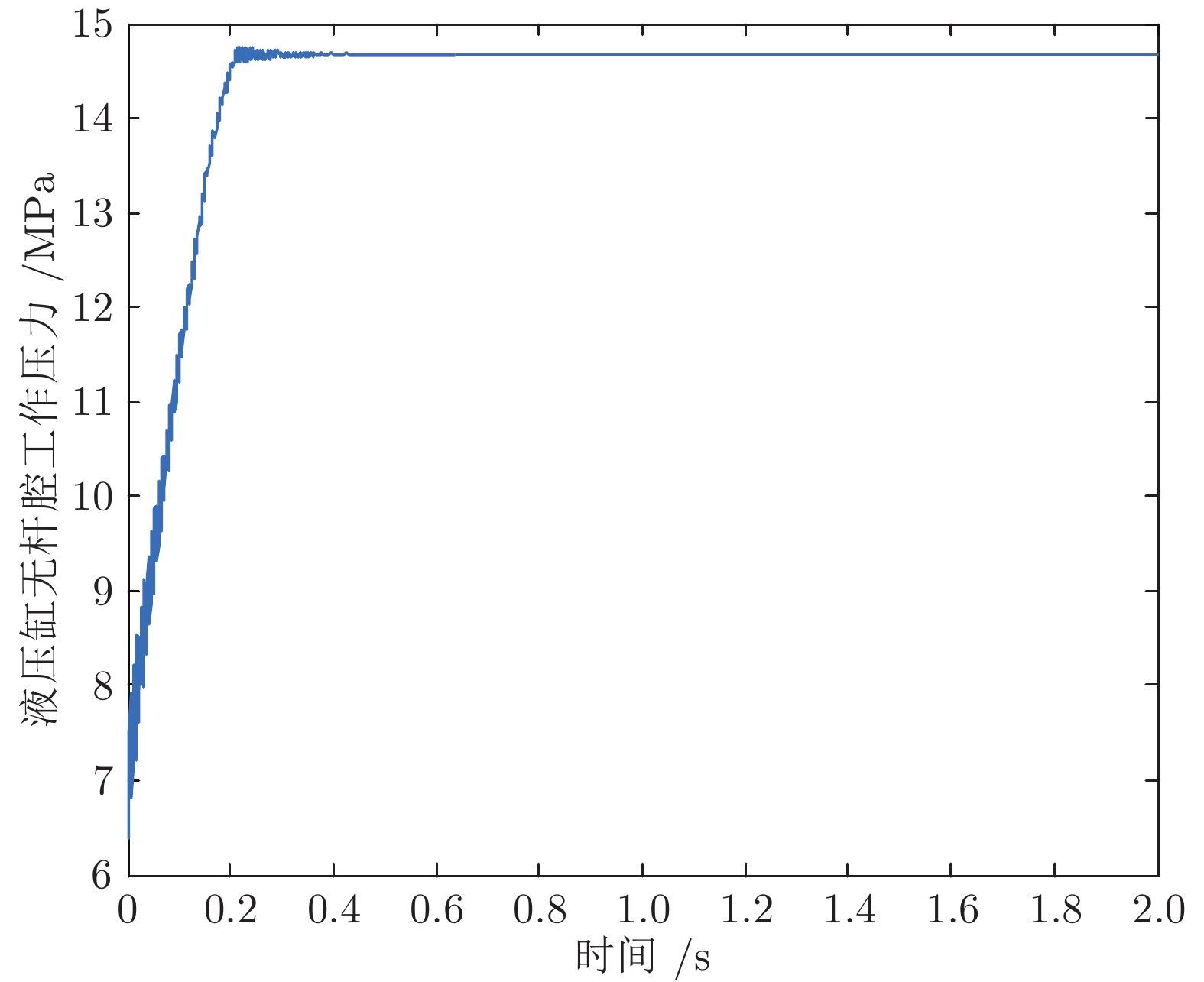
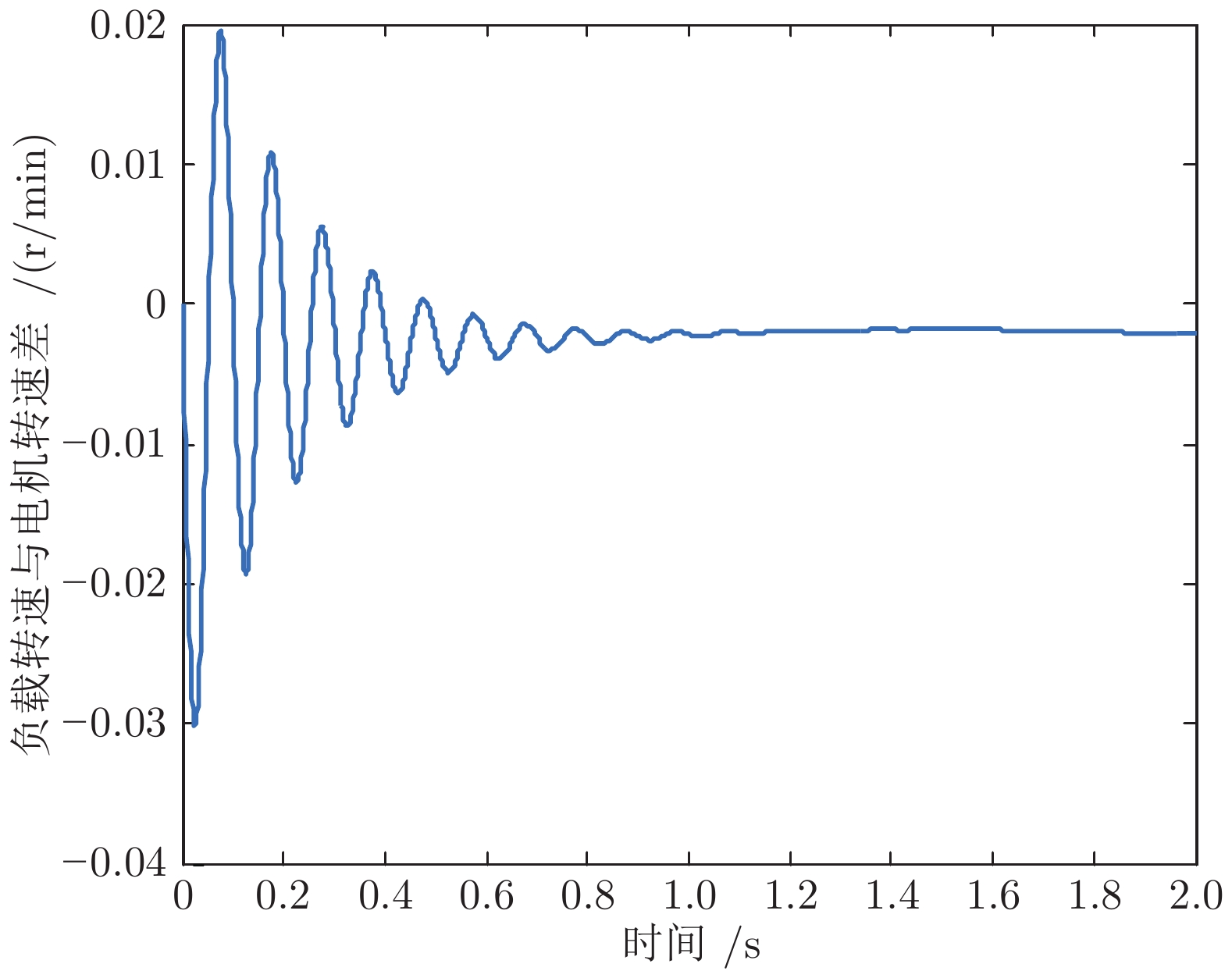
$$ [{z}_{11}, {z}_{12},{z}_{13},{z}_{21},{z}_{22},{z}_{23}]=[{ 2}, {2}, {0}{.1},\; {22}, \;{0}, \;{20}]$$ $$ [ {{\hat \Theta }_{ij}},\;{{\hat \rho }_{ij}} \,( {i = 1,2,j = 1,2,3} ) ] = [ {0, \cdots ,0}]\qquad\;\;\;\;$$ 表 1 轧机机电液垂扭耦合系统仿真参数Table 1 The simulation parametes of electromechanical hydraulic vertical torsional coupling system of rolling mill参数 数值 参数 数值 ${m_1}$ $8.9357 \times {10^4}\;{\rm{kg}}$ ${k_v}$ $1.25 \times {10^{ - 4}}\;{\rm{m/v}}$ ${k_{11}}$ $7.2 \times {10^{10}}\;{\rm{N/m}}$ ${\beta _e}$ $7 \times {10^8}\;{\rm{Pa}}$ ${c_{11}}$ $1.2\times {10}^{6}\;({\rm{N} }·{\rm{s} })/{\rm{m} }$ $V$ $0.0{{732} }\;{ {\rm{m} }^{ {3} } }$ ${P_s}$ $2 \times {10^7}\;{\rm{Pa}}$ $J{}_m$ $1\,552\;{\rm{kg} }·{\rm{m} }^{2}$ ${P_2}$ $1 \times {10^6}\;{\rm{Pa}}$ $J{}_L$ $1\,542\;{\rm{kg} }·{\rm{m} }^{2}$ ${A_1}$ $1.9635 \times {10^{ - 1} }\;{ {\rm{m} }^{{2} } }$ $K$ $5.93\times {10}^{6}\;({\rm{N} }·{\rm{m} })/{\rm{rad} }$ ${A_2}$ $3.015 \times {10^{ - 2} }\;{ {\rm{m} }^{{2} } }$ ${TL}1$ $14\,500\;{\rm{N} }·{\rm{m} }$ ${C_t}$ $5 \times {10^{ - 16}}$ ${TLD}$ $2\,190\times \sin\left({\rm{\pi } }t\right)\,{\rm{N} }·{\rm{m} }$ ${C_d}$ $0.{\rm{62}}$ $R$ 0.4 $w$ 0.119 ${c_1}$ 0.2 ${c_2}$ 0.1 ${c_3}$ 0.1 ${c_4}$ 0.2 $a$ 0.13 $b$ 0.002 $c$ 0.2 仿真结果如图3 ~ 8所示. 图3为在本文算法作用下垂振子系统中轧辊振动位移的响应曲线. 为了验证本文算法的优越性, 在同样的控制参数选取下, 基于传统反步控制策略的轧辊振动位移响应曲线同样体现在图3中. 由图3可以看出, 轧辊振动位移在本文提出的控制算法下衰减速度、稳态误差和超调量都得以保证, 而在传统无输出性能约束控制作用下, 垂振子系统的暂稳态性能指标较差. 同理, 图4为扭振子系统中负载转速跟踪误差在有无输出性能约束控制下的对比图. 从图4可以看出, 负载转速跟踪误差在本文提出的控制算法下趋于稳定, 并且严格限制在规定的上下界内, 而在传统无输出性能约束控制作用下, 扭振子系统的暂稳态性能指标较差. 从图5和图6可以看出, 轧辊振动速度和液压缸无杆腔工作压力都趋于稳定. 从图7和图8可以看出, 状态变量${z_{22}}$和${z_{23}}$始终保持有界.
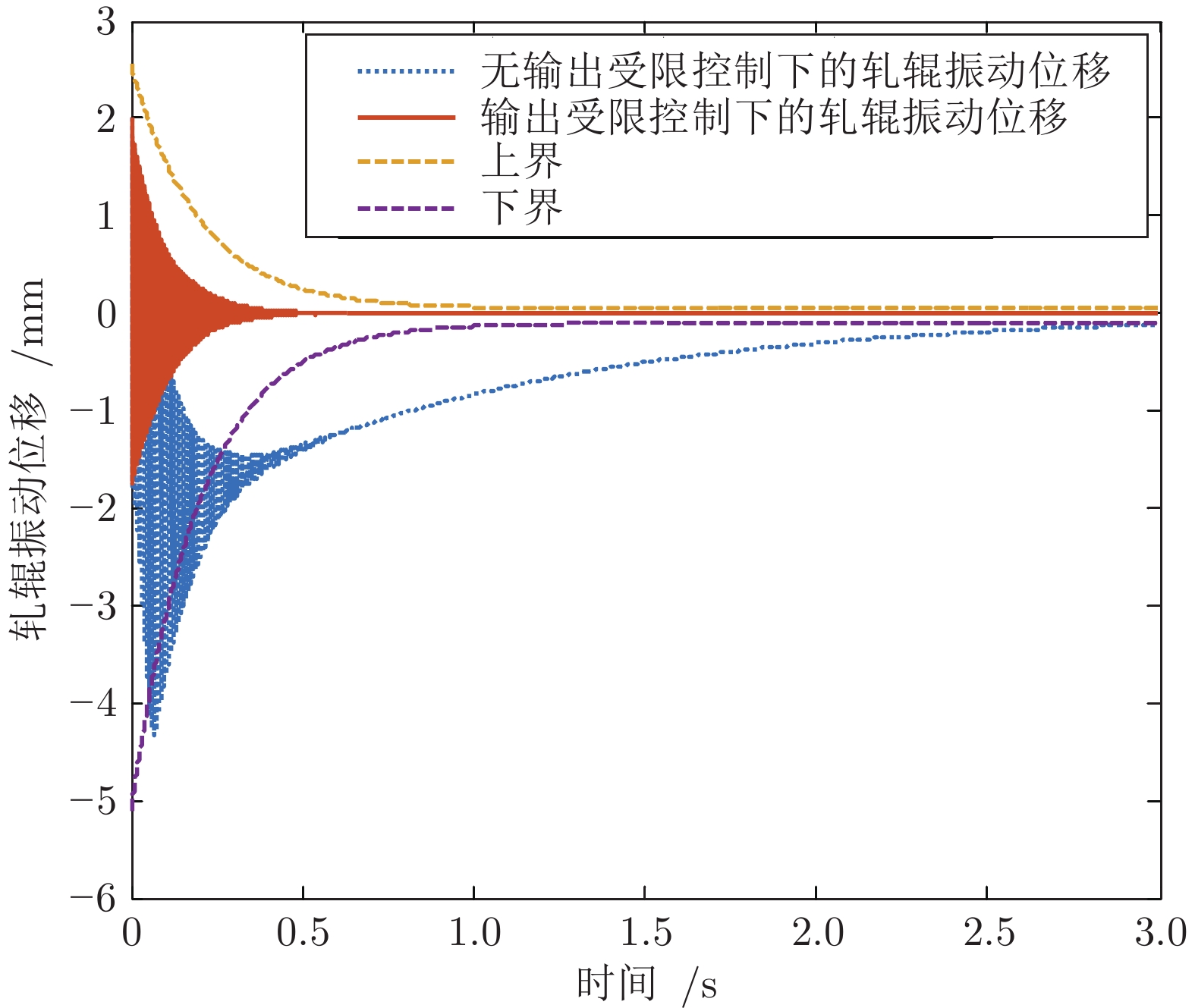 图 3 有无输出性能受限下的轧辊振动位移对比Fig. 3 Comparison of roll vibration displacement with or without output performance constraints control of coupled rolling mill vertical vibration system
图 3 有无输出性能受限下的轧辊振动位移对比Fig. 3 Comparison of roll vibration displacement with or without output performance constraints control of coupled rolling mill vertical vibration system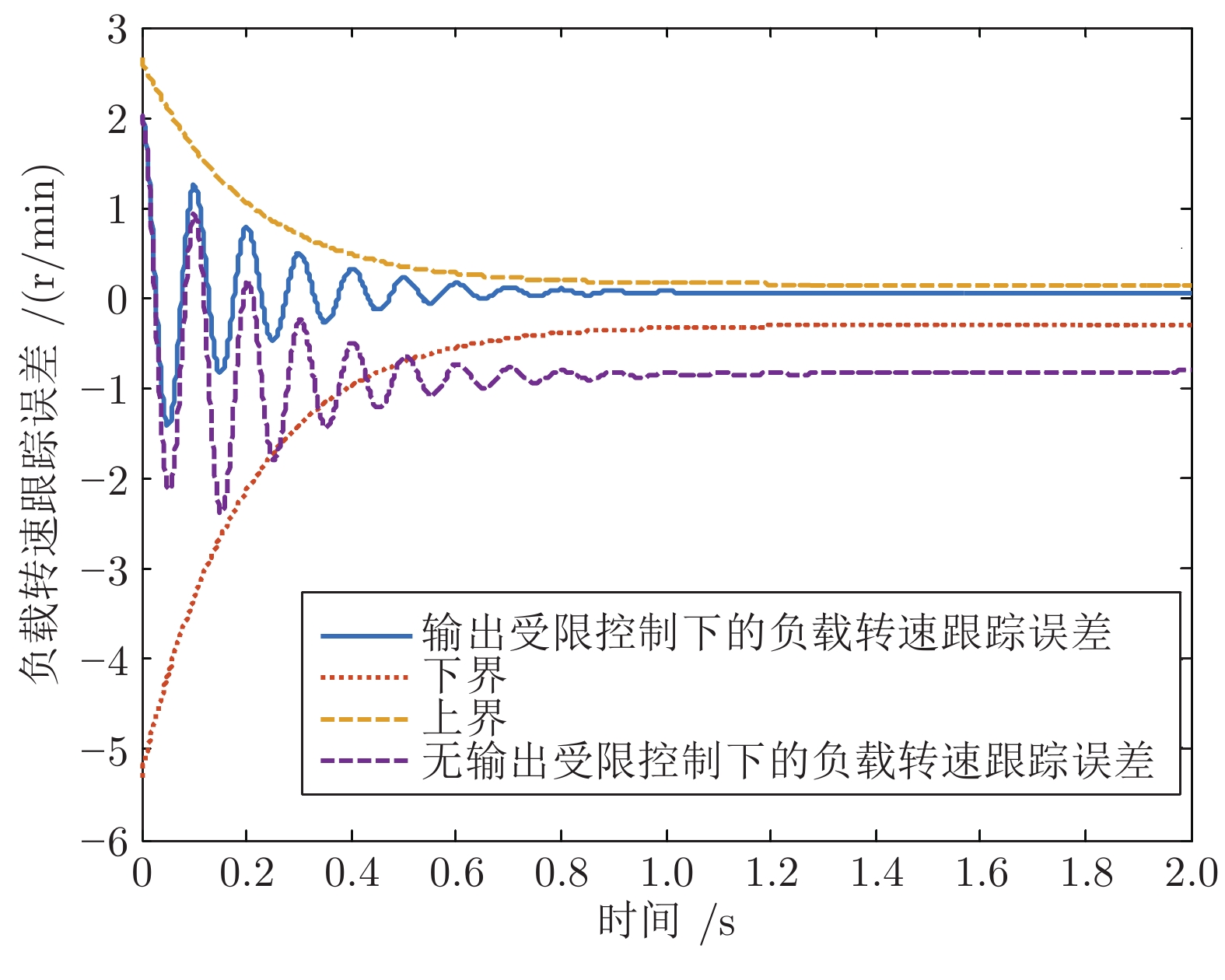 图 4 有无输出性能受限下的负载转速跟踪误差对比Fig. 4 Comparison of load speed tracking error with or without output performance constraints control of coupled rolling mill torsional vibration system
图 4 有无输出性能受限下的负载转速跟踪误差对比Fig. 4 Comparison of load speed tracking error with or without output performance constraints control of coupled rolling mill torsional vibration system4. 结束语
本文考虑轧机传动系统、液压系统和辊系机械部分之间的耦合影响, 建立了轧机机电液垂扭耦合振动模型, 进而研究了轧机机电液垂扭耦合振动控制策略. 针对耦合垂振子系统和耦合扭振子系统输出性能受限, 基于耦合设计法, 利用非对称正切障碍李雅普诺夫函数和反步法, 通过先设计耦合垂振自适应控制策略, 再设计耦合扭振自适应控制策略, 最终实现了对轧机垂扭耦合振动的有效抑制, 并通过仿真验证了算法的有效性. 在今后的工作中, 我们将考虑实际轧制过程不易测量信号的估计问题, 进一步将变量受限低复杂度控制策略应用到轧机振动抑制控制中, 实现对轧机振动的有效抑制.
-
图 2 轧机机电液垂扭耦合动力学模型图
Fig. 2 Dynamic model of vertical torsional coupling of rolling mill
图 3 有无输出性能受限下的轧辊振动位移对比
Fig. 3 Comparison of roll vibration displacement with or without output performance constraints control of coupled rolling mill vertical vibration system
图 4 有无输出性能受限下的负载转速跟踪误差对比
Fig. 4 Comparison of load speed tracking error with or without output performance constraints control of coupled rolling mill torsional vibration system
表 1 轧机机电液垂扭耦合系统仿真参数
Table 1 The simulation parametes of electromechanical hydraulic vertical torsional coupling system of rolling mill
参数 数值 参数 数值 ${m_1}$ $8.9357 \times {10^4}\;{\rm{kg}}$ ${k_v}$ $1.25 \times {10^{ - 4}}\;{\rm{m/v}}$ ${k_{11}}$ $7.2 \times {10^{10}}\;{\rm{N/m}}$ ${\beta _e}$ $7 \times {10^8}\;{\rm{Pa}}$ ${c_{11}}$ $1.2\times {10}^{6}\;({\rm{N} }·{\rm{s} })/{\rm{m} }$ $V$ $0.0{{732} }\;{ {\rm{m} }^{ {3} } }$ ${P_s}$ $2 \times {10^7}\;{\rm{Pa}}$ $J{}_m$ $1\,552\;{\rm{kg} }·{\rm{m} }^{2}$ ${P_2}$ $1 \times {10^6}\;{\rm{Pa}}$ $J{}_L$ $1\,542\;{\rm{kg} }·{\rm{m} }^{2}$ ${A_1}$ $1.9635 \times {10^{ - 1} }\;{ {\rm{m} }^{{2} } }$ $K$ $5.93\times {10}^{6}\;({\rm{N} }·{\rm{m} })/{\rm{rad} }$ ${A_2}$ $3.015 \times {10^{ - 2} }\;{ {\rm{m} }^{{2} } }$ ${TL}1$ $14\,500\;{\rm{N} }·{\rm{m} }$ ${C_t}$ $5 \times {10^{ - 16}}$ ${TLD}$ $2\,190\times \sin\left({\rm{\pi } }t\right)\,{\rm{N} }·{\rm{m} }$ ${C_d}$ $0.{\rm{62}}$ $R$ 0.4 $w$ 0.119 ${c_1}$ 0.2 ${c_2}$ 0.1 ${c_3}$ 0.1 ${c_4}$ 0.2 $a$ 0.13 $b$ 0.002 $c$ 0.2  下载: 导出CSV
下载: 导出CSV
-
[1] Gao Z Y, Liu Y, Zhang Q D, Liao M L, Tian B. Chatter model with structure-process-control coupled and stability analyses in the cold rolling system. Mechanical Systems and Signal Processing, 2020, 140: 106692. doi: 10.1016/j.ymssp.2020.106692 [2] 魏立群, 戴志方, 肖壮, 瞿志豪. 高速冷连轧机组的振动与对策研究[J]. 机械工程学报, 2016, 52(11): 88–94. doi: 10.3901/JME.2016.11.088Wei Li-Qun, Dai Zhi-Fang, Xiao Zhuang, Qu Zhi-Hao. Research of vibration and strategy in high speed cold-rolling mill. Journal of Mechanical Engineering, 2016, 52(11): 88–94 (in Chinese). doi: 10.3901/JME.2016.11.088 [3] Niroomand M R, Forouzan M R, Heidari A. Experimental analysis of vibration and sound in order to investigate chatter phenomenon in cold strip rolling. International Journal of Advanced Manufacturing Technology, 2019, 100(4): 673−682 [4] Lu X, Sun J, Song Z X, Li G T, Wang Z H, Hu Y J, et al. Prediction and analysis of cold rolling mill vibration based on a data-driven method. Applied Soft Computing, 2020, 96: 106706. doi: 10.1016/j.asoc.2020.106706 [5] 郜志英, 臧勇, 曾令强. 轧机颤振建模及理论研究进展. 机械工程学报, 2015, 51(16): 87–105+112. doi: 10.3901/JME.2015.16.087Gao Zhi-Ying, Zang Yong, Zeng Ling-Qiang. Review of modelling and theoretical studies on chatter in the rolling mills. Journal of Mechanical Engineering, 2015, 51(16): 87–105+112. (in Chinese). doi: 10.3901/JME.2015.16.087 [6] 王瑞鹏, 彭艳, 张阳, 孙建亮. 轧机耦合振动机理研究. 机械工程学报, 2013, 49(12): 66–71. doi: 10.3901/JME.2013.12.066Wang Rui-Peng, Peng Yan, Zhang Yang, Sun Jian-Liang. Mechanism research of rolling mill coupled vibration. Journal of Mechanical Engineering, 2013, 49(12): 66–71 (in Chinese). doi: 10.3901/JME.2013.12.066 [7] Lim H B, Yang H I. Experimental and numerical investigation of the vibration characteristics in a hot plate rolling mill based on multibody dynamics. ISIJ International, 2020, 60(11): 2477−2484. [8] 闫晓强, 吴先峰, 杨喜恩, 吴索团, 许建忠. 热连轧机扭振与轴向振动耦合研究. 工程力学, 2014, 31(02): 214–218.Yan Xiao-Qiang, Wu Xian-Feng, Yang Xi-En, Wu Suo-Tuan, Xu Jian-Zhong. Coupling research on torsional vibration and axial vibration of hot strip rolling mill. Engineering Mechanics. 2014, 31(02): 214-218 (in Chinese). [9] 凌启辉, 赵前程, 王宪, 康煜华. 热连轧机工作辊水平-垂直非线性振动特性及抑制. 中国机械工程, 2017, 28(16): 1943–1950+2007. doi: 10.3969/j.issn.1004-132X.2017.16.008Ling Qi-Hui, Zhao Qian-Cheng, Wang Xian, Kang Yu-Hua. Work roll horizontal-vertical nonlinear vibration characteristics and suppression of hot strip tandem mills. China Mechanical Engineering, 2017, 28(16): 1943–1950+2007 (in Chinese). doi: 10.3969/j.issn.1004-132X.2017.16.008 [10] 曾令强, 臧勇, 郜志英, 刘晓潺. 轧机整体耦合建模问题研究. 机械工程学报, 2015, 51(14): 46–53. doi: 10.3901/JME.2015.14.046Zeng Ling-Qiang, Zang Yong, Gao Zhi-Ying, Liu Xiao-Chan. Study on overall coupled modeling of the rolling mill. Journal of Mechanical Engineering, 2015, 51(14): 46–53 (in Chinese). doi: 10.3901/JME.2015.14.046 [11] 刘晓潺, 臧勇, 郜志英, 曾令强. 多方向耦合振动连轧机再生颤振建模及应用. 中南大学学报(自然科学版), 2017, 48(03): 635–643.Liu Xiao-Chan, Zang Yong, Gao Zhi-Ying, Zeng Ling-Qiang. Multidirectional regenerative chatter model of tandem rolling mills and its application. Journal of Central South University(Science and Technology), 2017, 48(03): 635–643 (in Chinese). [12] 张阳, 彭艳, 孙建亮, 臧勇. 板带轧机刚体柔体耦合振动系统的建模研究. 机械强度, 2016, 38(03): 429–434.Zhang Yang, Peng Yan, Sun Jian-Liang, Zang Yong. Strip rolling mill’s rigid-flexible coupling vibration modeling. Journal of Mechanical Strength, 2016, 38(03): 429–434 (in Chinese). [13] 钟掘, 唐华平. 高速轧机若干振动问题—复杂机电系统耦合动力学研究. 振动、测试与诊断, 2002, (01): 3–10+69.Zhong Jue, Tang Hua-Ping. Vibration problems of high speed rolling mill- study of dynamics of complex electromechanically coupled system. Journal of Vibration, Measurement and Diagnosis, 2002, (01): 3–10+69 (in Chinese). [14] 张瑞成, 卓丛林. 考虑电机内部因素影响的轧机主传动系统机电耦合振动特性研究. 机械科学与技术, 2017, 36(02): 184–189.Zhang Rui-Cheng, Zhuo Cong-Ling. Study on electromechanical coupling vibration characteristics of main drive system of rolling mill considering motor impact. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(02): 184–189 (in Chinese). [15] Wu J M, Yan X Q. Coupling vibration model for hot rolling mills and its application. Journal of Vibroengineering, 2019, 21(07): 1795–1809. doi: 10.21595/jve.2019.20226 [16] Dong L, Lakes R S. Advanced damper with high stiffness and high hysteresis damping based on negative structural stiffness, International Journal of Solids and Structures, 2013, 50(14): 2416–2423. [17] Mosayebi M, Zarrinkolah F, Farmanesh K. Calculation of stiffness parameters and vibration analysis of a cold rolling mill stand. International Journal of Advanced Manufacturing, 2017, 91(9): 4359–4369. [18] Heidari A, Forouzan M R, Niroomand M R. Development and evaluation of friction models for chatter simulation in cold strip rolling. International Journal of Advanced Manufacturing Technology, 2018, 96(5): 2055–2075. [19] 李崇坚, 段巍. 轧机传动交流调速机电振动控制. 北京: 冶金工业出版社, 2003.Li Chong-Jian, Duan Wei. Electromechanical Vibration Control of Rolling Mill Drive AC Speed Regulation. Beijing: Metallurgical Industry Press, 2003. [20] Song Y H, He W, He X Y, Han Z J. Vibration control of a high-rise building structure:Theory and experiment. IEEE/CAA Journal of Automatica Sinica, 2021, 8(04): 866−875. doi: 10.1109/JAS.2021.1003937 [21] 周丹峰, 李杰, 余佩倡, 陈强, 李亚楗. 磁浮交通轨排耦合自激振动分析及自适应控制方法. 自动化学报, 2019, 45(12): 2328−2343.Zhou D F, Li J, Yu P C, Chen Q, Li Y J. Analysis and adaptive control of the track induced self-excited vibration for the maglev transport. Acta Automatica Sinica, 2019, 45(12): 2328−2343 (in Chinese). [22] 苏建涛. 基于智能制造高品质薄带钢轧机振动控制关键技术研究. 电子技术, 2020, 49(01): 59–61.Su Jian-Tao. Study on key of vibration control for high quality thin strip mill based on intelligent manufacturing. Electronic Technology, 2020, 49(01): 59–61 (in Chinese). [23] Zhang R C, Tong C N. Torsional vibration control of the main drive system of a rolling mill based on an extended state observer and linear quadratic control. Journal of Vibration & Control, 2006, 12(3): 313–327. [24] 张登山, 李华德. H∞扭振抑制控制器在热连轧机组上的应用. 电工技术学报, 2006, (01): 92–97. doi: 10.3321/j.issn:1000-6753.2006.01.018Zhang Deng-Shan, Li De-Hua. H∞ vibration suppression controller in the hot continues rolling mill machine. Transactions of China Electrotechnical Society, 2006, (01): 92–97 (in Chinese). doi: 10.3321/j.issn:1000-6753.2006.01.018 [25] Qian C, Zhang L L, Hua C C. Adaptive torsional vibration control of the nonlinear rolling mill main drive system with performance constraints and sensor errors. International Journal of Control Automation and Systems, 2021, 19(03): 1264–1272. doi: 10.1007/s12555-020-0092-7 [26] Yan X Q, Qi J B, Wang X X. An active method suppressing rolling mill vibration: disturbance estimation and compensation algorithm. Journal of Iron and Steel Research International, 2019, 26(7): 697–703. doi: 10.1007/s42243-019-00300-3 [27] Yang X, Peng K X, Tong C N. Robust backstepping control for cold rolling main drive system with nonlinear uncertainties. Abstract and Applied Analysis, 2013, 387890. [28] 李小华, 胡利耀. 一类 p 规范型非线性系统预设性能有限时间H∞跟踪控制. 自动化学报, 2021, 47(12): 2870−2880Li Xiao-Hua, Hu Li-Yao. Prescribed performance finite-time H∞ tracking control for a class of p-normal form nonlinear systems. Acta Automatica Sinica, 2021, 47(12): 2870−2880 [29] Hua C C, Li K, Li Y F, Guan X P. Decentralized adaptive tracking quantized control for interconnected pure feedback time delay nonlinear systems. Journal of the Franklin Institute. 2018, 335: 2313–2328. [30] Zhao K, Song Y D. Chen C L P, Chen L. Control of nonlinear systems under dynamic constraints: A unified barrier function-based approach. Automatica. 2020, 119: 109102. doi: 10.1016/j.automatica.2020.109102 [31] 沈智鹏, 毕艳楠, 王宇, 郭晨. 输入输出受限船舶的轨迹跟踪自适应递归滑模控制. 控制理论与应用, 2020, 37(06): 1419–1427.Shen Zhi-Peng, Bi Yan-Nan, Wang Yu, Guo Chen. Adaptive recursive sliding mode control for surface vessel trajectory tracking with input and output constraints. Control Theory & Applications, 2020, 37(06): 1419–1427 (in Chinese). [32] Liu Y L, Ma H J, Ma H. Adaptive fuzzy fault-tolerant control for uncertain nonlinear switched stochastic systems with time-varying output constraints. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 2487–2498. doi: 10.1109/TFUZZ.2018.2814596 [33] Liu Y J, Gong M Z, Liu L, Tong S C, Chen C L P. Fuzzy observer constraint based on adaptive control for uncertain nonlinear MIMO systems with time-varying state constraints. IEEE Transactions on Cybernetics, 2021, 51(03): 1380–1389. doi: 10.1109/TCYB.2019.2933700 [34] 方一鸣, 许衍泽, 李建雄. 具有输入饱和的电液伺服位置系统自适应动态面控制. 控制理论与应用, 2014, 31(04): 511–518.Fang Yi-Ming, Xu Yan-Ze, Li Jian-Xiong. Adaptive dynamic surface control for electro-hydraulic servo position system with input saturation. Control Theory and Applications, 2014, 31(4): 511–518 (in Chinese). [35] Wang C L, Lin Y. Decentralized adaptive tracking control for a class of interconnected nonlinear time-varying systems. Automatic, 2015, 54: 16–24. doi: 10.1016/j.automatica.2015.01.041 [36] Liu F, Hua Y Z, Dong X W, Li Q D, Ren Z. Adaptive fault-tolerant time-varying formation tracking for multi-agent systems under actuator failure and input saturation. ISA Transactions, 2020, 104: 145–153. doi: 10.1016/j.isatra.2019.01.024 [37] 郭涛, 梁燕军. 不确定非线性时滞关联大系统自适应分散容错控制. 自动化学报, 2017, 43(03): 486–492.Guo Tao, Liang Yan-Jun. Adaptive decentralized fault-tolerant control for uncertain nonlinear time-delay large scale systems. Acta Automatica Sinica, 2017, 43(03): 486–492 (in Chinese). [38] 赵光同, 曹亮, 周琪, 李鸿一. 具有未建模动态的互联大系统事件触发自适应模糊控制. 自动化学报, 2021, 47(8): 1932−1942Zhao Guang-Tong, Cao Liang, Zhou Qi, Li Hong-Yi. Event-triggered adaptive fuzzy control for interconnected large-scale systems with unmodeled dynamics. Acta Automatica Sinica, 2021, 47(8): 1932−1942 -

 下载:
下载:

计量
- 文章访问数: 1535
- HTML全文浏览量: 317
- PDF下载量: 152
- 被引次数: 0
