

-
摘要: 现有Perspective-n-line (PnL)问题求解算法无法在获得高求解精度的同时保证高求解效率. 为解决这个缺点, 提出了同时兼具求解效率和求解精度算法EPnL. 该方法首先将PnL问题转换为求二次曲面方程组交点的问题, 然后利用单位四元数中变量不同时为零的特性, 分类参数化PnL问题中的旋转矩阵. 最后, 为克服常规优化方法可靠性和效率较低的问题, 同时兼具求解效率和求解精度算法利用二次曲面方程组自身的结构信息, 采用低次项参数化高次项的方式将二次曲面方程组的求解问题转换为单变量多项式的求解问题. 实验表明, 相比于现有算法, 该算法在具有高求解精度的同时也兼具有高求解效率.Abstract: The existing algorithms for solving the perspective-n-line (PnL) problem cannot achieve high accuracy as well as maintain high computational efficiency. To solve this disadvantage, the EPnL algorithm is proposed. The EPnL firstly transfers the PnL problem into the problem of finding the intersection of quadratic surface equations, and then uses a classification parametrization, which is derived from the fact that variables are not simultaneously zero in the unit-quaternion, to parameterize the rotation matrix in the PnL problem. At last, to overcome the problem of low reliability and low efficiency of conventional optimization methods, the EPnL uses the structure information of the system of quadratic surface equations, and transfers the problem of finding the intersection of quadratic surface equations into the solving problem of univariate polynomials using the strategy that the higher order terms are parameterized by the lower order terms in the system of quadratic surface equations. Experimental results show that the proposed algorithm has high accuracy as well as high efficiency compared with existing algorithms.
-
Key words:
- Computer vision /
- PnL problem /
- pose estimation /
- vision-based navigation
1) 1https://sites.google.com/view/ping-wang-homepage 2) 2http://www.robots.ox.ac.uk/~vgg/ -
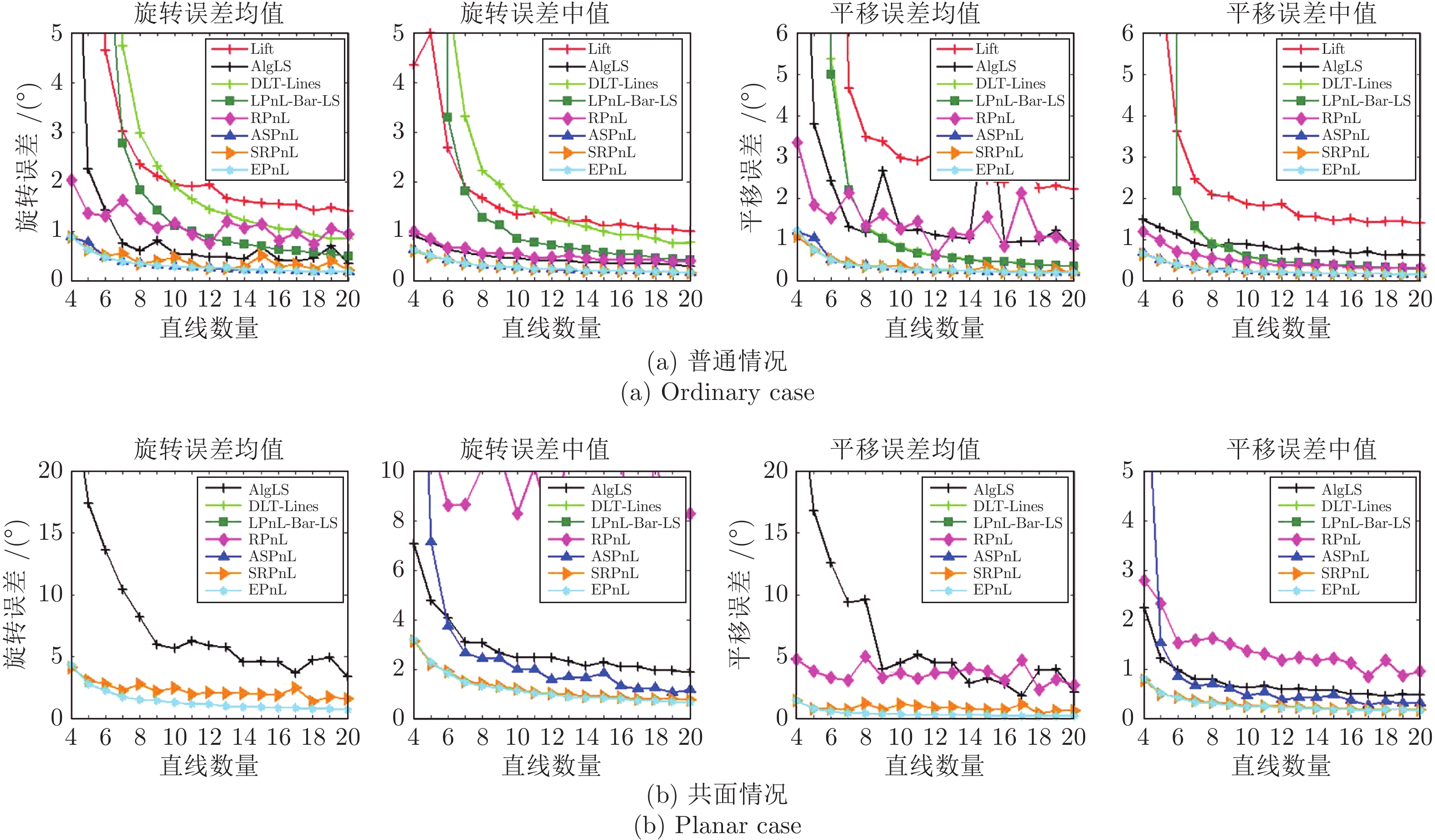
图 2 当直线数目变化时旋转和平移误差的均值和中值
Fig. 2 The mean and median of rotation and translation errors when the number of lines varies
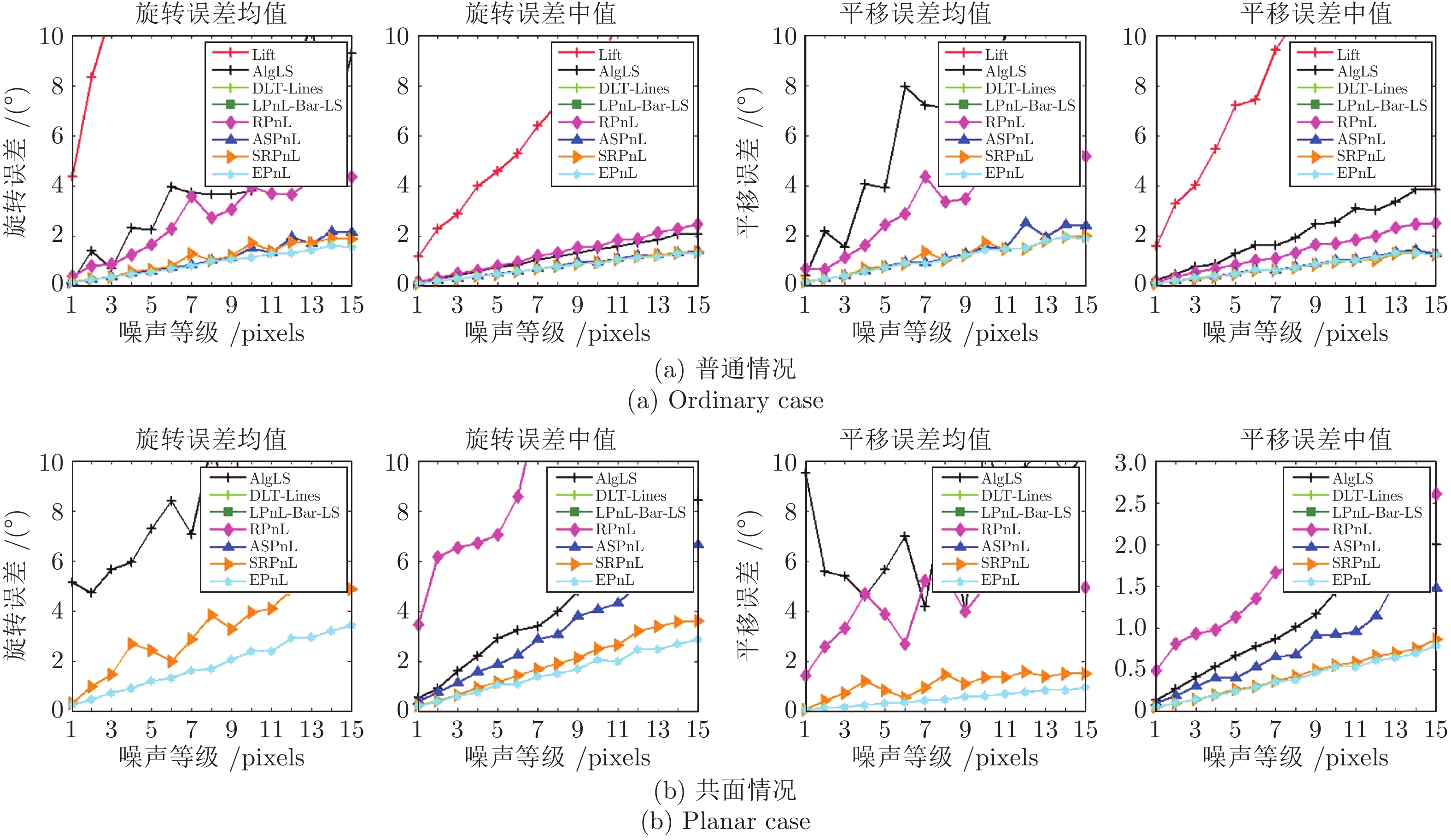
图 3 当噪声等级变化时旋转和平移误差的均值和中值
Fig. 3 The mean and median of rotation and translation errors when the noise level varies
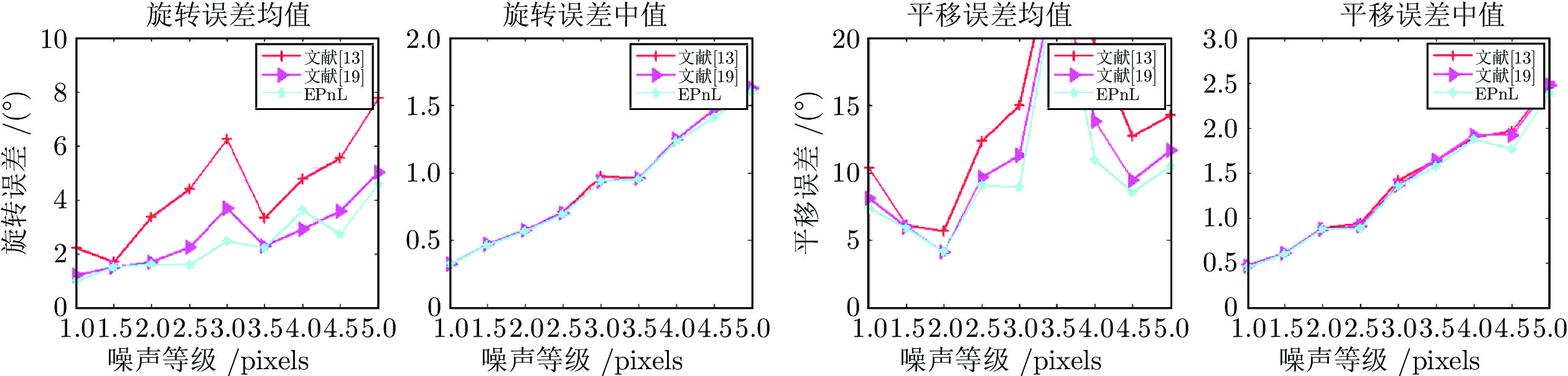
图 4 最小情况下(n = 3)旋转和平移误差的均值和中值
Fig. 4 The mean and median of rotation and translation errors in the minimal case (n = 3)
表 1 解的个数对比
Table 1 Comparison of the number of solutions
 下载: 导出CSV
下载: 导出CSV
表 2 各算法在VGG数据集上的旋转和平移误差均值
Table 2 The mean of rotation and translation errors for each method on the VGG dataset
数据集名称 Model-House Corridor Merton-College- Ⅰ Merton-College- Ⅱ Merton-College-Ⅲ University-Library Wadham-College 图像数量 10 11 3 3 3 3 5 AlgLS $\Delta \theta [ \circ ]$ 0.4220 0.1983 3.6200 55.8037 3.7495 1.8838 60.0517 $\Delta T[m]$ 0.0384 0.0888 1.1504 14.1879 1.3683 0.9519 9.8801 DLT-Lines $\Delta \theta [ \circ ]$ 0.8651 0.1104 0.0869 0.2117 0.1751 0.1736 0.1343 $\Delta T[m]$ 0.0834 0.0415 0.0274 0.1224 0.0625 0.0751 0.0809 LPnL-Bar-LS $\Delta \theta [ \circ ]$ 0.4135 0.1178 0.0241 0.0261 0.0652 0.3642 0.1526 $\Delta T[m]$ 0.0403 0.0440 0.0099 0.0149 0.0233 0.1632 0.0909 RPnL $\Delta \theta [ \circ ]$ 0.5521 0.3652 1.0870 0.3249 1.7528 2.9731 0.4200 $\Delta T[m]$ 0.0631 0.1150 0.3215 0.1660 0.9121 1.5613 0.1909 ASPnL $\Delta \theta [ \circ ]$ 0.2265 0.0911 0.1141 0.1515 1.5584 3.6662 0.4227 $\Delta T[m]$ 0.0162 0.0298 0.0314 0.0600 0.5571 1.6683 0.1955 SRPnL $\Delta \theta [ \circ ]$ 0.2258 158.952 0.4381 0.1151 36.4034 4.1848 0.0880 $\Delta T[m]$ 0.0160 17.557 0.1064 0.0495 3.9398 2.0632 0.0407 EPnL $\Delta \theta [ \circ ]$ 0.2265 0.0969 0.0306 0.0170 0.0504 0.0871 0.0808 $\Delta T[m]$ 0.0162 0.0252 0.0097 0.0123 0.0147 0.0343 0.0375
下载: 导出CSV
-
[1] 于鲲, 从明煜, 段佳佳, 李向宇. 星箭对接环抓捕点单目视觉导航方法. 仪器仪表学报, 2018, 39(12): 228--236.Yu Kun, Cong Min-Yu, Duan Jia-Jia, Li Xiang-Yu. Monocular visual navigation method for capture point of docking ring. Chinese Journal of Scientific Instrument, 2018, 39(12): 228--236. [2] 马艳阳, 叶梓豪, 刘坤华, 陈龙. 基于事件相机的定位与建图算法: 综述. 自动化学报, 2020, 46(x): 1--11.Ma Yan-Yang, Ye Zi-Hao, Liu Kun-Hua, Chen Long. Event-based visual localization and mapping algorithms: a survey. Acta Automatica Sinica, 2020, 46(x): 1--11. [3] 俞毓锋, 赵卉菁. 基于相机与摇摆激光雷达融合的非结构化环境定位. 自动化学报, 2019, 45(9): 1791--1798.YU Yu-Feng, ZHAO Hui-Jing. Off-road localization using monocular camera and nodding LiDAR. Acta Automatica Sinica, 2019, 45(9): 1791--1798. [4] 郝洁, 李高峰, 孙雷, 卢翔, 张森, 刘景泰. 基于视觉标志间相对位姿的可变形臂标定方法. 自动化学报, 2018, 44(8): 1413--1424.HAO Jie, LI Gao-Feng, SUN Lei, LU Xiang, ZHANG Sen, LIU Jing-Tai. Relative-pose-of-markers based calibration method for a deformable manipulator. Acta Automatica Sinica, 2018, 44(8): 1413--1424. [5] Alhaija H A, Mustikovela S K, Mescheder L, Geiger A, Rother C. Augmented reality meets computer vision: efficient data generation for urban driving scenes. International Journal of Computer Vision, 2018, 126(9): 961--972. doi: 10.1007/s11263-018-1070-x [6] Griva I, Nash S G, Sofer A. Linear and Nonlinear Optimization. Philadelphia: Siam, 2009. 355−478 [7] Abdel-Aziz Y I, Karara H M, Hauck M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering and Remote Sensing, 2015, 81(2): 103--107. doi: 10.14358/PERS.81.2.103 [8] Přibyl B, Zemčík P, Čadík M. Camera pose estimation from lines using Plücker coordinates. In: Proceedings of the 2015 British Machine Vision Conference, Swansea, United Kingdom: 2015. 45: 1−12 [9] Xu C, Zhang L, Cheng L, Koch R. Pose estimation from line correspondences: a complete analysis and a series of solutions. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1209--1222. doi: 10.1109/TPAMI.2016.2582162 [10] Přibyl B, Zemčík P, Čadík M. Absolute pose estimation from line correspondences using direct linear transformation. Computer Vision and Image Understanding, 2017, 161: 130--144. doi: 10.1016/j.cviu.2017.05.002 [11] Ansar K, Daniilidis K. Linear pose estimation from points or lines. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(5): 578--589. doi: 10.1109/TPAMI.2003.1195992 [12] Mirzaei F M, Roumeliotis S I. Globally optimal pose estimation from line correspondences. In: Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China: 2011. 5581−5588 [13] Zhang L, Xu C, Lee K M, Koch R. Robust and efficient pose estimation from line correspondences. In: Proceedings of the 2012 Asian Conference on Computer Vision, Heidelberg, Berlin: 2012. 217−230 [14] Wang P, Xu G L, Cheng Y H, Yu Q D. Camera pose estimation from lines: a fast, robust and general method. Machine Vision and Applications, 2019, 30: 603--614. doi: 10.1007/s00138-019-01012-0 [15] Yu, Q D, Xu G L, Zhang L M, Shi J C. A consistently fast and accurate algorithm for estimating camera pose from point correspondences, Measurement, 2020, 172: 108914. [16] Zheng Y Q, Kuang Y B, Sugimoto S, Astrom K, Okutomi M. Revisiting the PnP problem: A Fast, general and optimal solution. In: Proceedings of the 2013 International Conference on Computer Vision, Sydney, Australia: 2013. 2344−2351 [17] Kukelova Z, Bujnak M, Pajdla T. Automatic generator of minimal problem solvers. In: Proceedings of the 2008 European Conference on Computer Vision, Heidelberg, Berlin: 2008. 302−315 [18] Press W, Teukolsky S, Vetterling W, Flannery B. Numerical recipes 3rd edition: The art of scientific computing. Cambridge: Cambridge University Press, 2007. [19] Wang P, Xu G L, Cheng Y H. A novel algebraic solution to the perspective-three-line pose problem, Computer Vision and Image Understanding, 2020, 191: 102711. doi: 10.1016/j.cviu.2018.08.005 -

 下载:
下载:


计量
- 文章访问数: 2562
- HTML全文浏览量: 1016
- PDF下载量: 184
- 被引次数: 0
