

Saturation Constraint One-step Optimal Control of Electrode Current for the Fused Magnesia Smelting Process
-
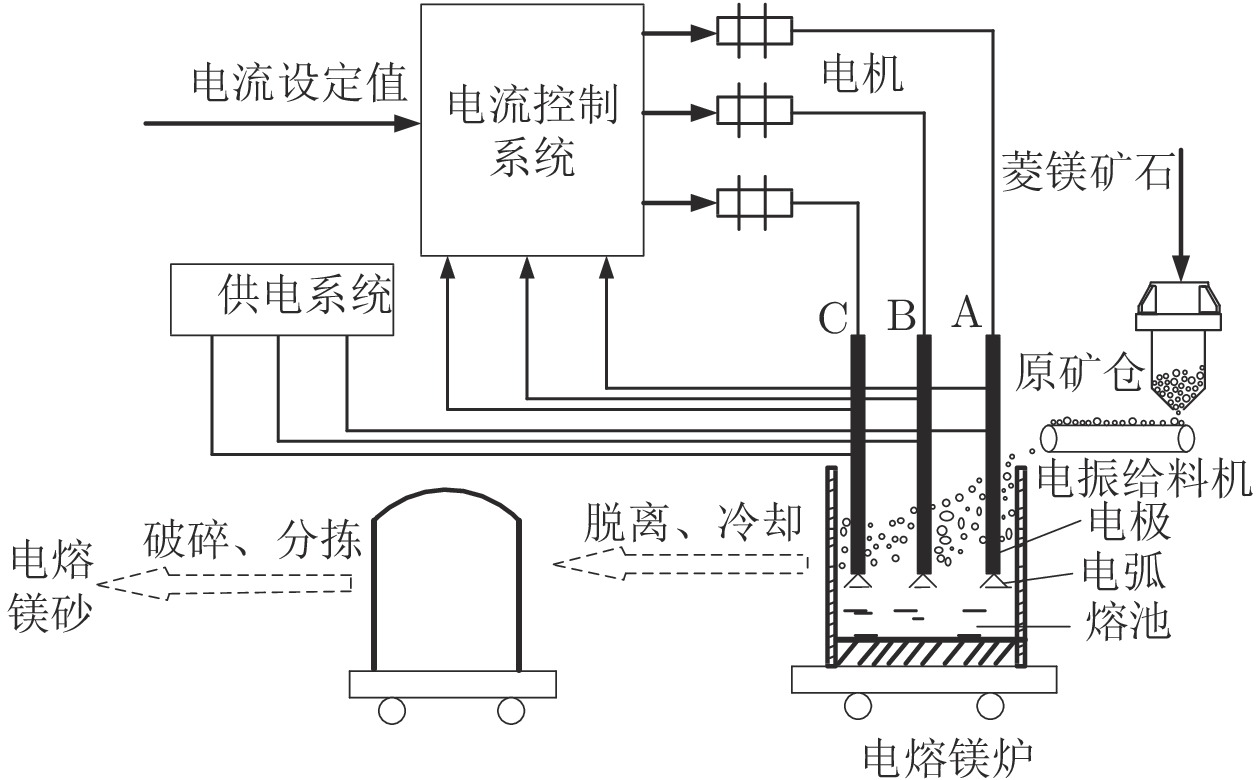
摘要: 电熔镁砂熔炼过程通过电极电流熔化物料, 采用埋弧方式, 边熔化边加料, 其被控对象是以转动方向与频率为输入, 以电极电流为输出的三相电机. 本文通过引入中间变量并转化控制目标, 将电熔镁砂熔炼过程三相电极电流的复杂非线性控制问题简化为线性控制问题, 提出了一种简化的电极电流饱和约束一步最优控制方法, 并通过引入拉格朗日乘子向量和松弛向量验证了该方法的最优性. 理论分析和仿真对比实验结果表明本文所提简化控制方法的有效性和优越性. 此外, 当考虑电熔镁砂熔炼过程中存在的不可测外部干扰时, 在上述简化的电极电流饱和约束算法的基础上设计了高阶干扰观测器, 理论分析和仿真结果验证了具有高阶干扰观测器的简化算法的优越性.Abstract: The fused magnesia smelting process melts the material through the electrode current, and uses the submerged arc method to feed the material while melting. The controlled object is a three-phase motor with the rotation direction and frequency as the inputs and the electrode current as the outputs. In this paper, by introducing an intermediate variable and transforming the control objective, the complex nonlinear control problem of the three-phase electrode current for the fused magnesia smelting process is simplified into a linear control problem, and a saturation constraint one-step optimal controller is proposed. The optimality of the method is verified by introducing Lagrangian multiplier vectors and relaxation vectors. Theoretical analysis and simulation results show the effectiveness and superiority of the simplified control method. Furthermore, when unmeasurable external disturbances are considered in the fused magnesia smelting process, a high-order disturbance observer is designed on the basis of the simplified electrode current saturation constraint algorithm. Theoretical analysis and simulation results verify the superiority of the simplified algorithm with the high-order disturbance observer.
-
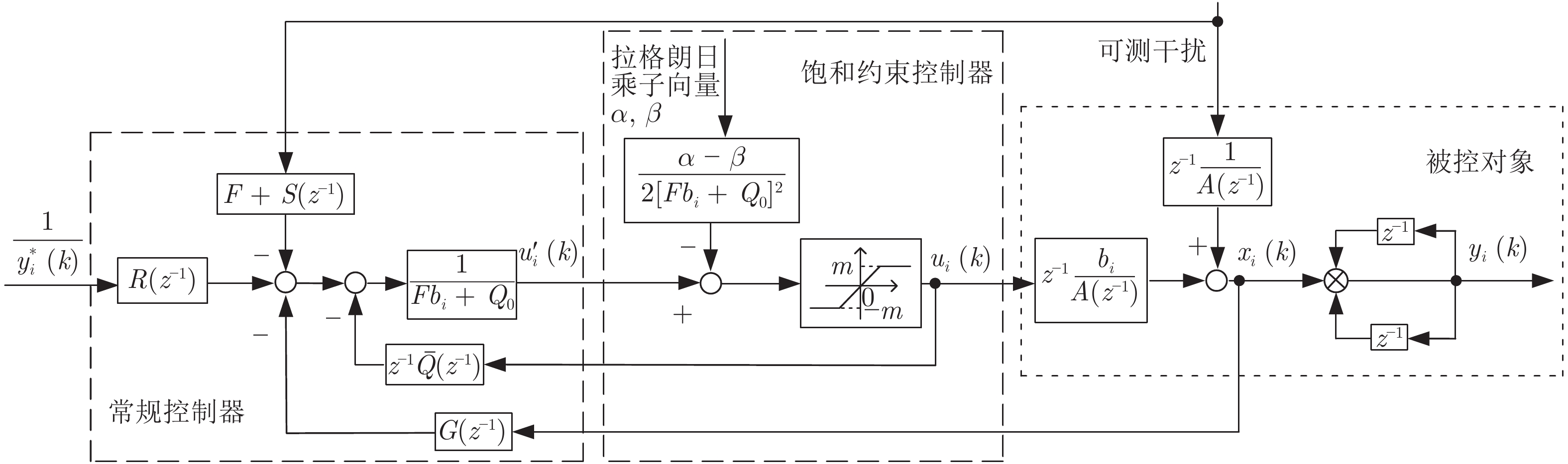
图 2 饱和约束一步最优控制结构图
Fig. 2 Structure diagram of one-step optimal control with saturation constraint
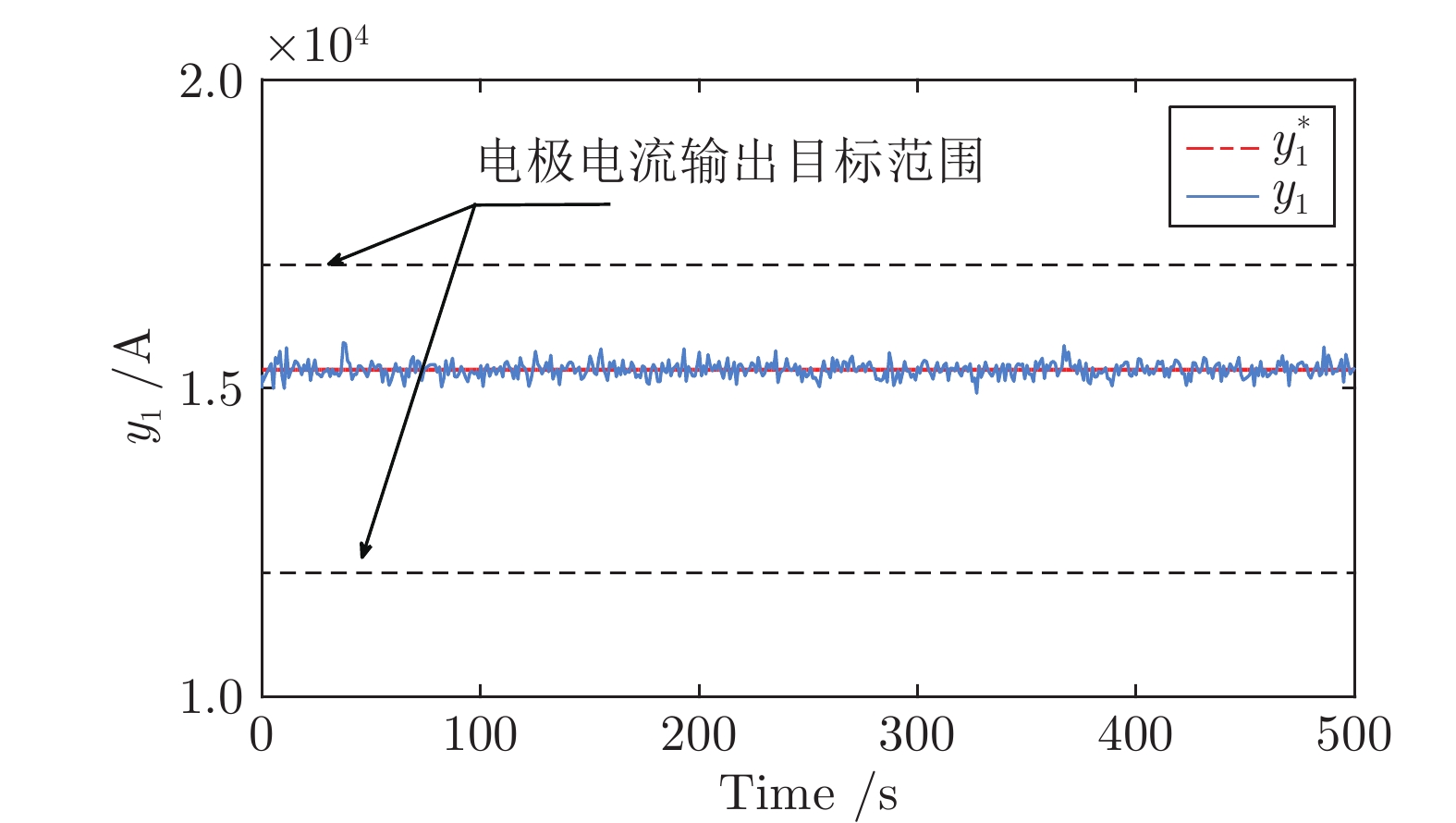
图 4 采用本文控制方法时A相电极电流
$y_1$ Fig. 4 A-phase electrode current
$y_1$ using the control method in this paper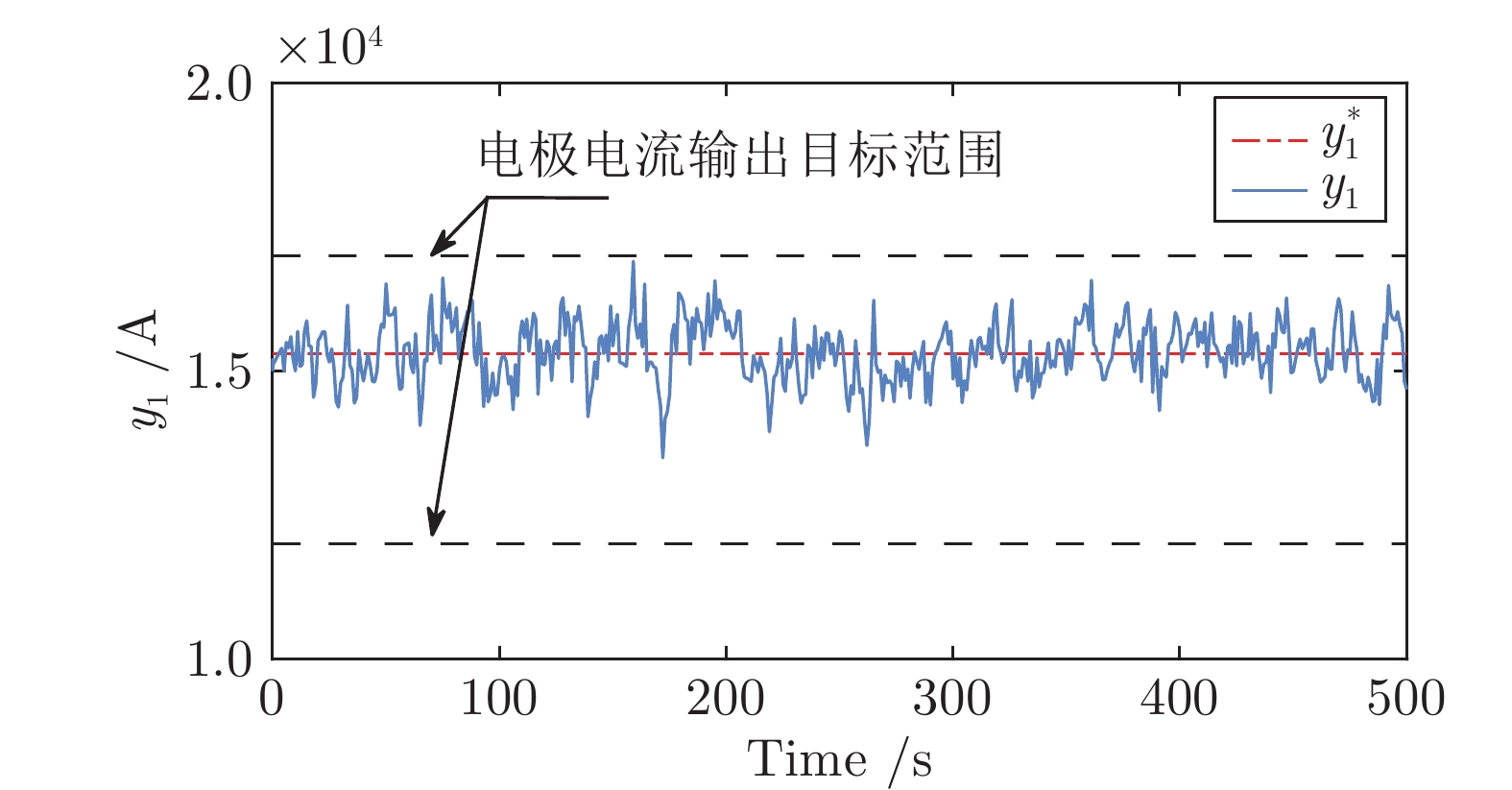
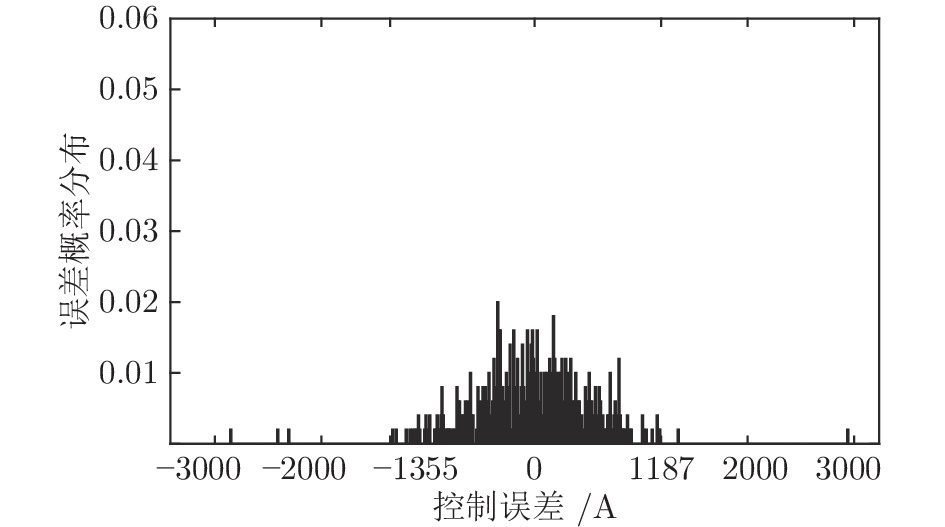
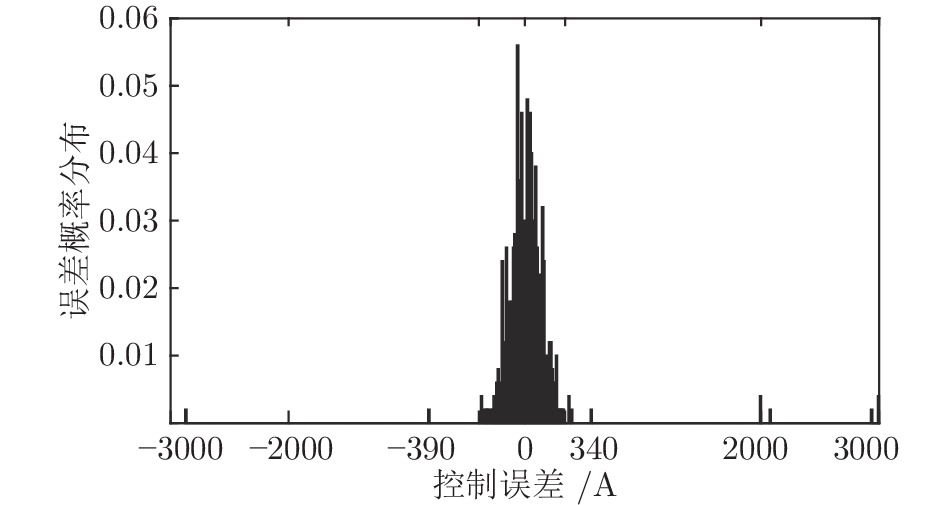
图 8 采用本文控制方法时A相电极电流误差概率分布
Fig. 8 Error probability distribution of A-phase electrode current using the control method in this paper
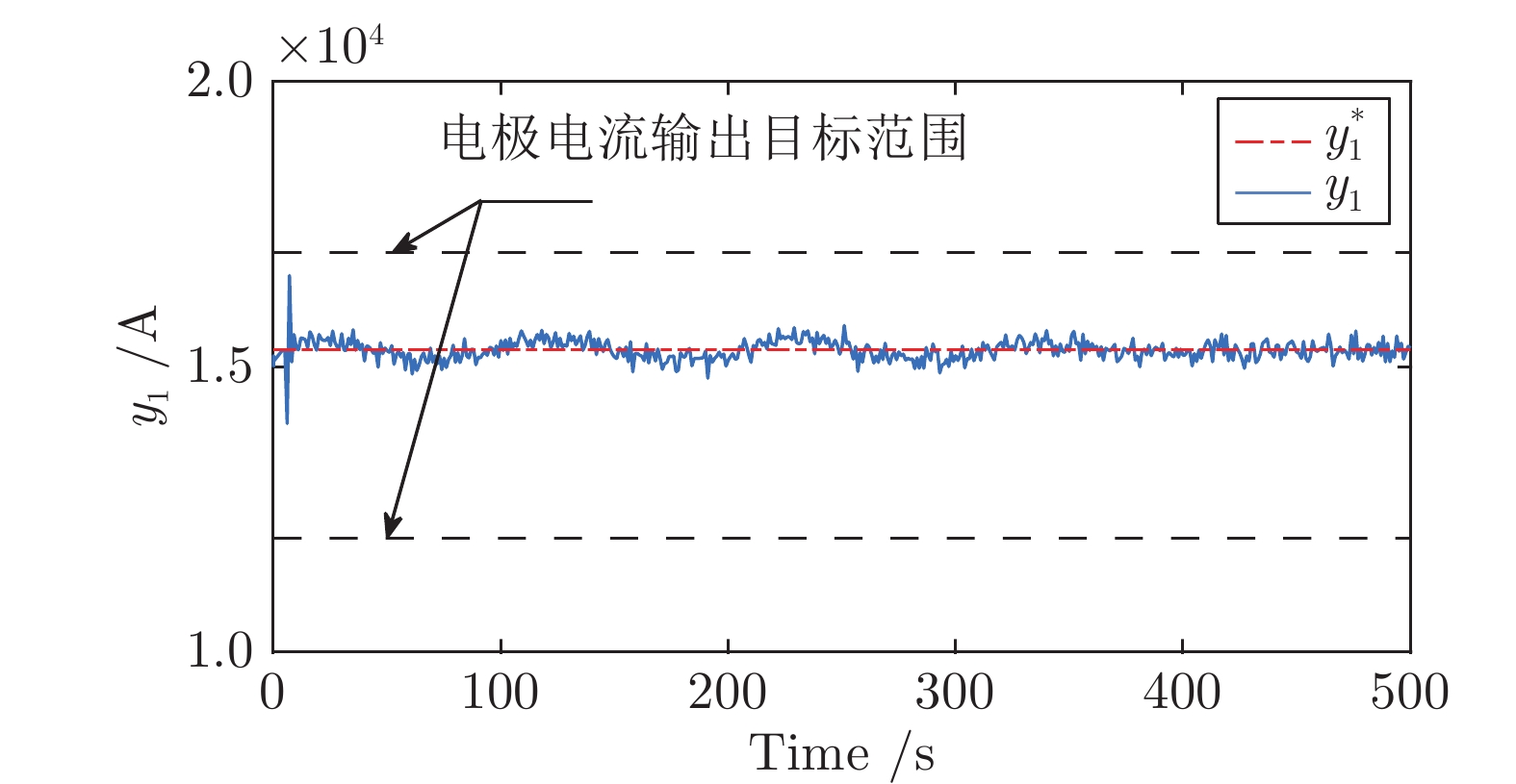
图 9 加入不可测干扰时A相电极电流
$y_1$ Fig. 9 A-phase electrode current
$y_1$ when unmeasurable disturbance is introduced
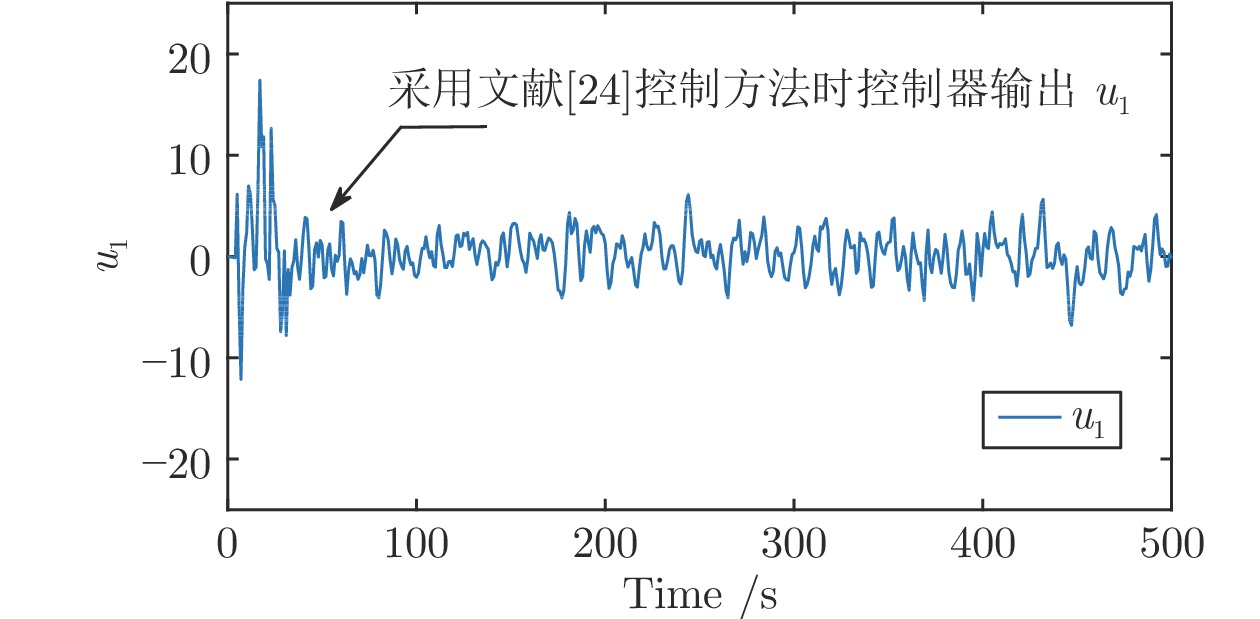
图 10 加入不可测干扰时控制器输出
$u_1$ Fig. 10 Controller output
$u_1$ when unmeasurable disturbance is introduced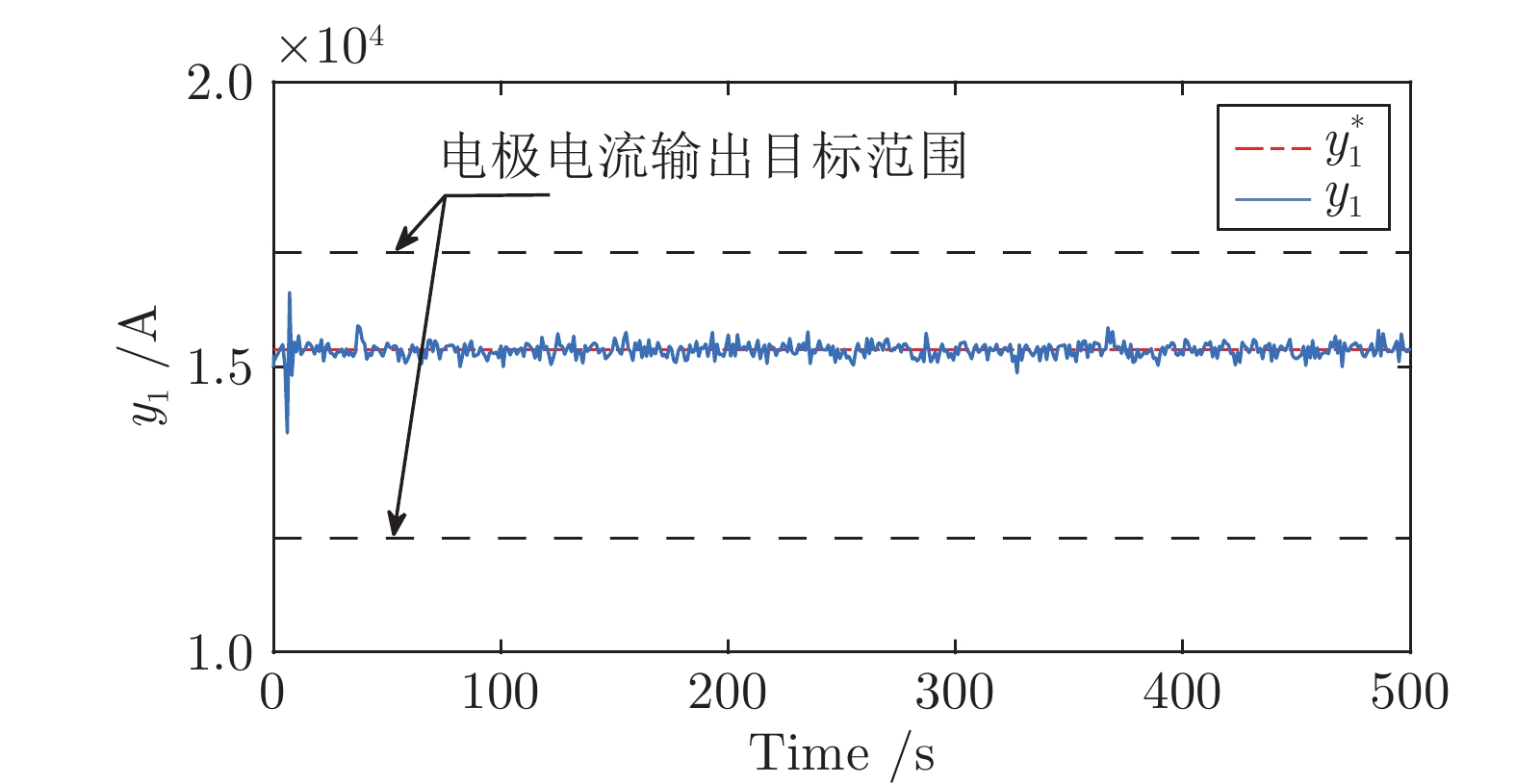
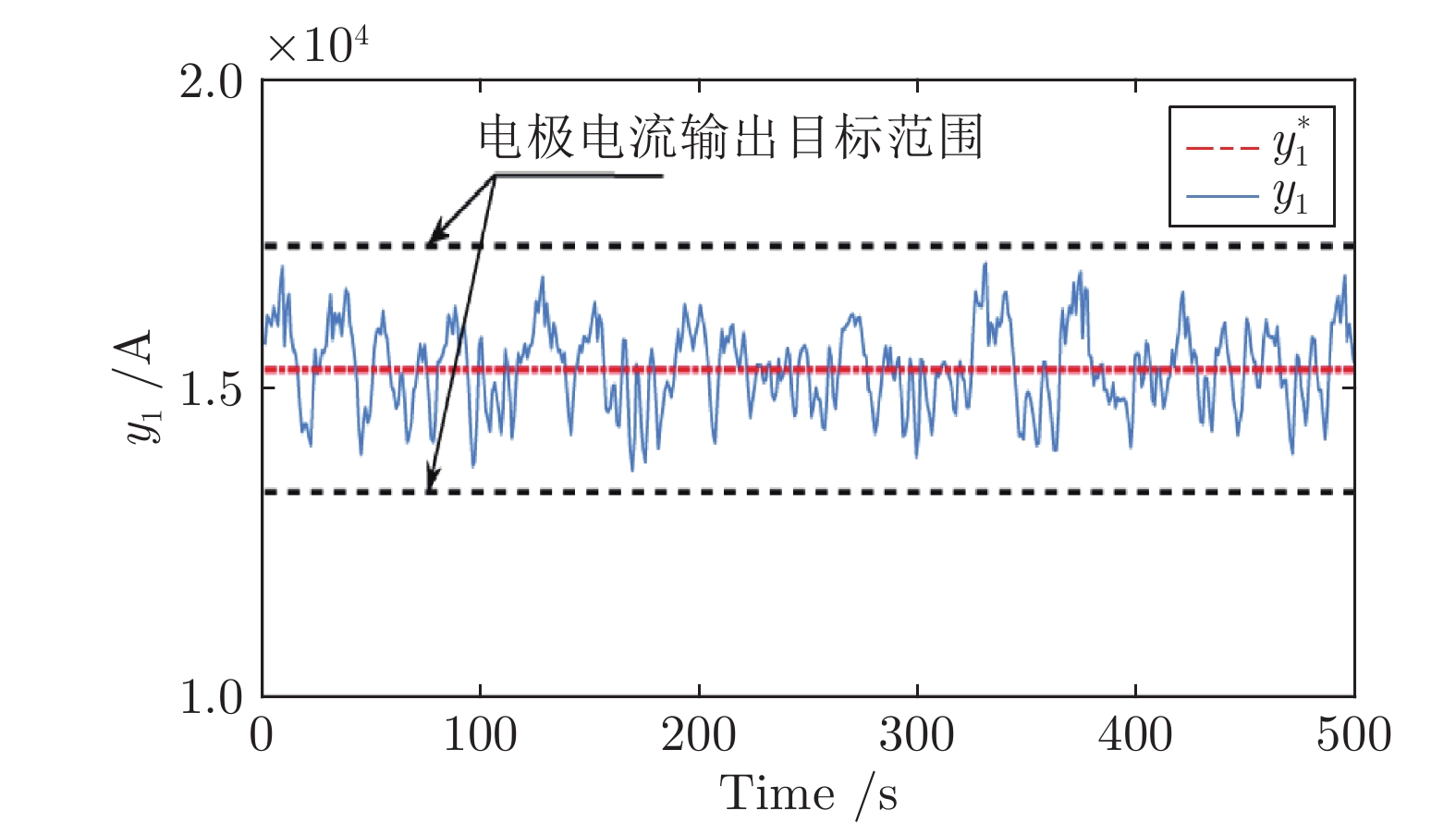
图 11 采用高阶干扰观测器控制时A相电极电流
$y_1$ Fig. 11 A-phase electrode current
$y_1$ using the proposed high-order disturbance observer based controller
图 12 采用高阶干扰观测器时控制器输出
$u_1$ Fig. 12 Controller output
$u_1$ using the proposed high-order disturbance observer based controller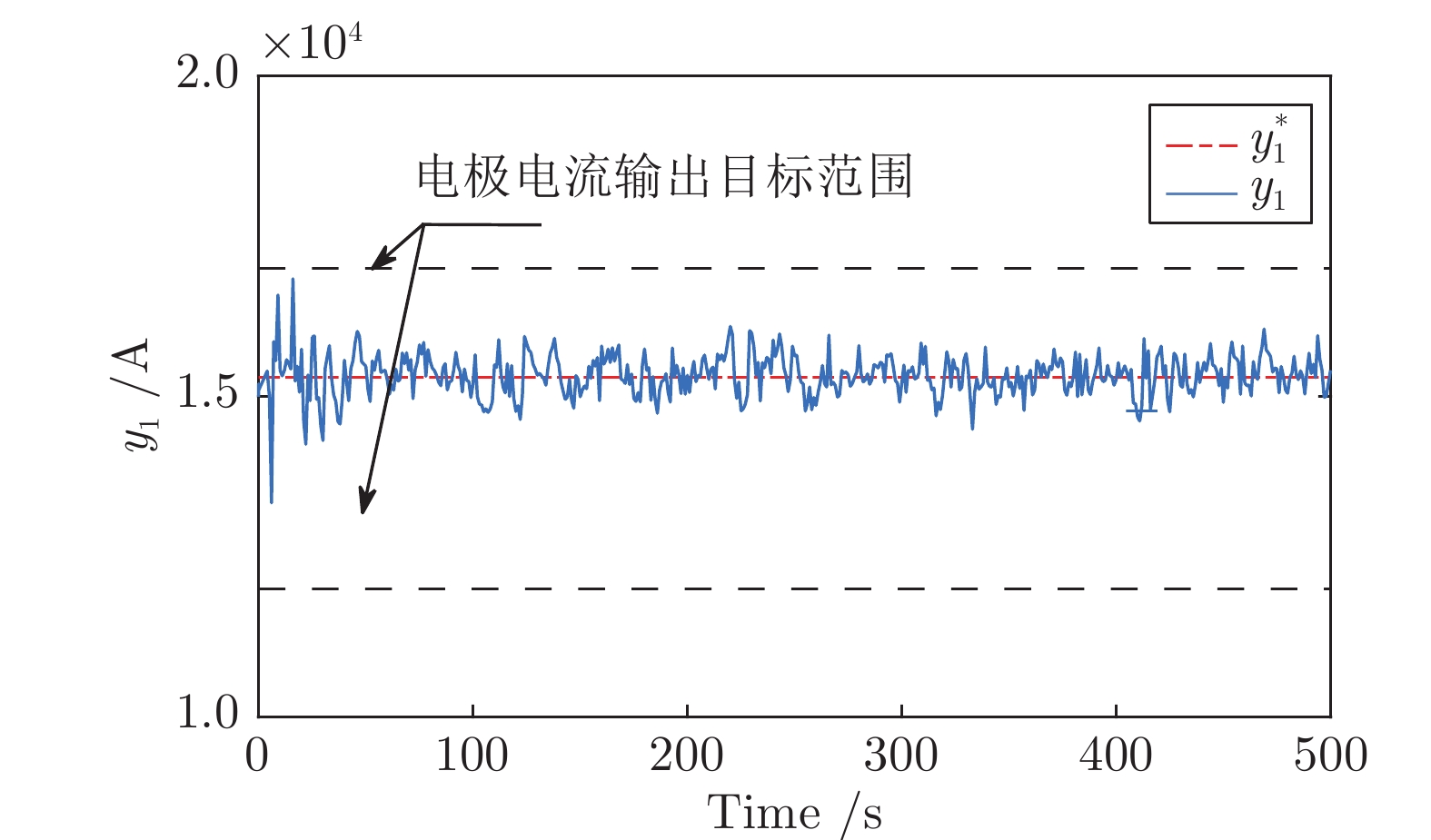
表 1 电极电流动态模型中参数的符号及物理意义
Table 1 Symbols and meanings of parameters in dynamic model of electrode current
符号 物理意义 $f_{1}(\cdot)$ 随原料颗粒长度和杂质成分变化的埋弧电阻率 $f_{2}(\cdot)$ 随原料颗粒长度和杂质成分变化的熔池电阻率 $r_{\rm {iarc}}$ 埋弧等效弧柱半径 $h_{\rm {ipool }}(\cdot)$ 随原料颗粒长度、杂质和电极电流变化的熔池高度 $U$ 熔炼电压 $p$ 电极极对数 $r_{d}$ 升降机构等效齿轮半径 $s$ 转差率  下载: 导出CSV
下载: 导出CSV
表 2 采用文献[1]控制方法、文献[21]控制方法和本文控制方法时A相电极电流
$y_1$ 的性能评价Table 2 Performance evaluating of A-phase electrode current
$y_1$ using the control method proposed in this paper and described in [1] and [21]
下载: 导出CSV
表 3 采用文献[24]控制方法和本文控制方法时A相电极电流
$y_1$ 的性能评价Table 3 Performance evaluating of A-phase electrode current
$y_1$ using the control method proposed in this paper and described in [24]${\rm {MSE}}$ ${\rm {IAE}}$ 采用本文第3节控制方法 $0.4970 \times 10^{6}$ $0.0854 \times 10^{6}$ 文献[24]的控制方法 $0.5906 \times 10^{6}$ $0.2879 \times 10^{6}$ 本文控制方法 $0.2951 \times 10^{6}$ $0.0784 \times 10^{6}$ 与第3节方法相比降低 $40.62 \;{\text{%} }$ $8.20\; {\text{%} }$ 与文献[24]方法相比降低 $50.03\; {\text{%} }$ $72.77\; {\text{%} }$
下载: 导出CSV
-
[1] 王维洲, 吴志伟, 柴天佑. 电熔镁砂熔炼过程带输出补偿的PID控制. 自动化学报, 2018, 44(7): 1282−1292Wang Wei-Zhou, Wu Zhi-Wei, Chai Tian-You. PID control with output compensation in the smelting process of fused magnesia. Acta Automatica Sinica, 2018, 44(7): 1282−1292 [2] Narendra K S, Parthasarathy K. Identification and control of dynamical systems using neural networks. IEEE Transactions on Neural Networks, 1990, 1(1): 4−27 doi: 10.1109/72.80202 [3] Jagannathan S. Adaptive fuzzy logic control of feedback linearizable discrete-time dynamical systems under persistence of excitation. Automatica, 1998, 34(11): 1295−1310 doi: 10.1016/S0005-1098(98)00084-3 [4] Chen F C, Khalil H K. Adaptive control of a class of nonlinear discrete-time systems using neural networks. IEEE Transactions on Automatic Control, 1995, 40(5): 791−801 doi: 10.1109/9.384214 [5] Sahoo A, Xu H, Jagannathan S. Approximate optimal control of affine nonlinear continuous-time systems using event-sampled neurodynamic programming. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(3): 639−652 doi: 10.1109/TNNLS.2016.2539366 [6] Narayanan V, Jagannathan S. Event-triggered distributed approximate optimal state and output control of affine nonlinear interconnected systems. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(7): 2846−2856 doi: 10.1109/TNNLS.2017.2693205 [7] Heydari A, Balakrishnan S N. Finite-horizon control-constrained nonlinear optimal control using single network adaptive critics. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(1): 145−157 doi: 10.1109/TNNLS.2012.2227339 [8] Zhao Q M, Xu H, Jagannathan S. Neural network-based finite-horizon optimal control of uncertain affine nonlinear discrete-time systems. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(3): 486−499 doi: 10.1109/TNNLS.2014.2315646 [9] Li J N, Chai T Y, Lewis F L, Ding Z T, Jiang Y. Off-policy interleaved Q-learning: optimal control for affine nonlinear discrete-time systems. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(5): 1308−1320 doi: 10.1109/TNNLS.2018.2861945 [10] Lin H W, Zhao B, Liu D R, Alippi C. Data-based fault tolerant control for affine nonlinear systems through particle swarm optimized neural networks. IEEE/CAA Journal of Automatica Sinica, 2020, 7(4): 954−964 doi: 10.1109/JAS.2020.1003225 [11] Wang Z S, Liu L, Zhang H G. Neural network-based model-free adaptive fault-tolerant control for discrete-time nonlinear systems with sensor fault. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(8): 2351−2362 doi: 10.1109/TSMC.2017.2672664 [12] 刘艳军, 王伟. 一类多变量非线性系统的自适应模糊控制. 自动化学报, 2007, 33(11): 1163−1169Liu Yan-Jun, Wang Wei. Adaptive fuzzy control for a class of multivariable nonlinear systems. Acta Automatica Sinica, 2007, 33(11): 1163−1169 [13] Liu Y J, Gao Y, Tong S C, Li Y M. Fuzzy approximation-based adaptive backstepping optimal control for a class of nonlinear discrete-time systems with dead-zone. IEEE Transactions on Fuzzy Systems, 2016, 24(1): 16−28 doi: 10.1109/TFUZZ.2015.2418000 [14] Treesatayapun C. Discrete-time adaptive controller for unfixed and unknown control direction. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5367-5375 doi: 10.1109/TIE.2017.2777414 [15] Huang J T, Law Y C. Adaptive linearizing fuzzy control of delayed MIMO nonstrict-feedback systems. IEEE Transactions on Fuzzy Systems, 2020, 28(10): 2592−2604 doi: 10.1109/TFUZZ.2019.2945233 [16] Goodwin G. Adaptive Filtering Prediction and Control. Mineola: Dover Publications, 2013. [17] 柴天佑, 岳恒. 自适应控制. 北京: 清华大学出版社, 2016.Chai Tian-You, Yue Heng. Adaptive Control. Beijing: Tsinghua University Press, 2016 [18] Goodwin G, Ramadge P, Caines P. Discrete-time multivariable adaptive control. IEEE Transactions on Automatic Control, 1980, 25(3): 449−456 doi: 10.1109/TAC.1980.1102363 [19] Chaoui F Z, Giri F, Dion J M, M-Saad M, Dugard L. Direct adaptive control subject to input amplitude constraint. IEEE Transactions on Automatic Control, 2000, 45(3): 485−490 doi: 10.1109/9.847729 [20] 王东委, 富月. 基于高阶干扰观测器的极点配置控制器及应用. 控制理论与应用, 2020, 37(08): 1815−1825Wang Dong-Wei, Fu Yue. Pole placement controller based on high-order disturbance observer and its application. Control Theory & Applications, 2020, 37(08): 1815−1825 [21] Yamamoto T, Takao K, Yamada T. Design of a data-driven PID controller. IEEE Transactions on Control Systems Technology, 2009, 17(1): 29−39 doi: 10.1109/TCST.2008.921808 [22] Hagglund T. A control-loop performance monitor. Control Engineering Practice, 1995, 3(11): 1543−1551 doi: 10.1016/0967-0661(95)00164-P [23] Chang J L. Applying discrete-time proportional integral observers for state and disturbance estimations. IEEE Transactions On Automatic Control, 2006, 51(5): 814−818 doi: 10.1109/TAC.2006.875019 [24] Guo B Z, Wu Z H, Zhou H C. Active disturbance rejection control approach to output-feedback stabilization of a class of uncertain nonlinear systems subject to stochastic disturbance. IEEE Transactions on Automatic Control, 2016, 61(6): 1613−1618 doi: 10.1109/TAC.2015.2471815 -

 下载:
下载:


























计量
- 文章访问数: 1549
- HTML全文浏览量: 601
- PDF下载量: 158
- 被引次数: 0
